
Recognizing Actions in High-Resolution Low-Framerate Videos:
A Feasibility Study in the Construction Sector
Benjamin Vandersmissen
∗
, Arian Sabaghi
∗
, Phil Reiter and Jose Oramas
University of Antwerp, Imec-IDLab, Antwerp, Belgium
∗
both authors had equal contribution.
Keywords:
Action Recognition, Computer Vision, Deep Learning, Video Processing.
Abstract:
Action recognition addresses the automated comprehension of human actions within images or video se-
quences. Its applications extend across critical areas, mediating between visual perception and intelligent
decision-making. However, action recognition encounters multifaceted challenges, including limited anno-
tated data, background clutter, and varying illumination conditions. In the context of the construction sector,
distinct challenges arise, requiring specialized approaches. This study investigates the applicability of estab-
lished action recognition methodologies in this dynamic setting. We evaluate both sequence-based (YOWO)
and frame-based (YOLOv8) approaches, considering the effect that resolution and frame rate have on perfor-
mance. Additionally, we explore self-supervised learning techniques to enhance recognition accuracy. Our
analysis aims to guide the development of more effective and efficient practical action recognition methods.
1 INTRODUCTION
Action recognition in computer vision automates the
identification and understanding of human actions in
videos and images, essential for various applications.
It helps machines comprehend human movements,
benefiting human-robot interaction (Rodomagoulakis
et al., 2016), video retrieval (Ramezani and Yagh-
maee, 2016), entertainment (Huang et al., 2017), and
autonomous driving (Chen et al., 2020).
Action recognition is a field full of challenges,
the most pervasive being the scarcity of annotated
data, which hampers the training and generalization
of models across various scenarios. Additionally,
distinguishing human figures within cluttered back-
grounds remains a formidable task, due to visual noise
and occlusions. These challenges are exacerbated in
dynamic environments like construction sites, where
recognizing worker actions presents unique complex-
ities not seen in more controlled settings typical of
standard benchmarks (Fathi and Mori, 2008; Carreira
and Zisserman, 2017; Feichtenhofer et al., 2017).
The relatively small scale of workers against large
construction sites complicates detection and tracking,
worsened by cluttered conditions and varying outdoor
lighting. Additionally, video is recorded at a very
low frame rate, further deviating from conventional
benchmarks.
Here, we navigate the landscape of existing action
recognition methodologies and assess their suitabil-
ity to the construction context. We conduct this study
along two distinct trajectories. Firstly, we delve into
a sequence-based action recognition method , scruti-
nizing the efficacy of the YOWO (You Only Watch
Once) approach (K
¨
op
¨
ukl
¨
u et al., 2019). Complemen-
tary to this, we explore the effectiveness of frame-
based methods, the YOLO (You Only Look Once) ap-
proach (Reis et al., 2023; Redmon et al., 2016).
Through rigorous experimentation, we highlight
the effectiveness of various techniques in real-world
action recognition, emphasizing the importance of
resolution and frame rate. Furthermore, our investi-
gation delves into the potential enhancement through
self-supervised learning techniques, providing a com-
prehensive understanding of their impact on action
recognition performance. We expect that with this
meticulous analysis we assist in paving the way
for more effective and efficient action recognition
methodologies in practical applications.
The rest of the paper is structured as following:
in section 2 we go over related work. Our method-
ology — including context, datasets and evaluation
metrics — is discussed in section 3. Experiments are
conducted and discussed in section 4 and finally, we
conclude our paper with section 5.
Vandersmissen, B., Sabaghi, A., Reiter, P. and Oramas, J.
Recognizing Actions in High-Resolution Low-Framerate Videos: A Feasibility Study in the Construction Sector.
DOI: 10.5220/0012423900003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
593-600
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
593

2 RELATED WORK
Action recognition and localization are closely related
yet distinct problems with few integrated solutions.
We categorize existing research into two main cate-
gories.
Action Recognition. In action recognition, 3D
Convolutional Neural Networks (CNNs) such as
C3D (Tran et al., 2015), P3D (Qiu et al., 2017),
and R(2+1)D (Tran et al., 2018) play a crucial
role, with C3D utilizing 3D convolutions and pool-
ing layers for feature extraction, while P3D and
R(2+1)D enhance efficiency through factorized con-
volutions. Multi-stream networks like the two-stream
CNNs (Simonyan and Zisserman, 2014) and Slow-
Fast Networks (Feichtenhofer et al., 2019) dedicate
two streams to capture spatial and temporal informa-
tion separately. Hybrid networks combine CNNs with
recurrent layers such as LSTMs (Wang and Schmid,
2013; Kar and Prabhakaran, 2017). To integrate
structural aspects, (Yan et al., 2018) employs spatio-
temporal graph convolution. Similarly, (Si et al.,
2019) applied GCN-LSTM with an attention mech-
anism to model temporal dependencies.
Action Recognition in Construction Sites. In con-
struction sites, action recognition requires special-
ized methods. (Roberts and Golparvar-Fard, 2019) in-
troduces a multi-step approach using RetinaNet for
equipment detection, optical flow for consistent de-
tection, and various techniques like SVM, HMMs,
and GMMs for activity categorization. (Li and Li,
2022) encodes skeletons of workers into a feature ma-
trix, uses an attention model in a GAN-based data im-
putation framework, and employes a ResNet model
for action categorization. (Ishioka et al., ) adopted
a 3D Inception-v1 multi-stream approach, processing
RGB and optical flow frames from video clips and
averaging appearance and dynamic feature maps for
classification.
Action Localization. Action localization in videos
draws from successful object detection methodolo-
gies like the R-CNN series (Girshick et al., 2014)
which propose and classify regions in a two-stage
process. For real-time applications, YOLO (Red-
mon et al., 2016) and SSD (Liu et al., 2016) sim-
plify this to a single stage, enhancing real-time per-
formance. Innovative methods, such as those using
optical flow for region proposal (Weinzaepfel et al.,
2015; Zhang et al., 2020), further enhanced action lo-
calization. YOWO (You Only Watch Once) (K
¨
op
¨
ukl
¨
u
et al., 2019) combined action localization and recog-
nition in a single-stage model, using dual-branch de-
sign for comprehensive feature extraction. YOWO
combines 2D and 3D feature extractors to capture spa-
tial and spatio-temporal information. These features
are then integrated through a Channel Fusion & At-
tention Module (CFAM) for robust action detection
across frames.
The latest development in the YOLO series,
YOLOv8, has found its way into recent action recog-
nition solutions (Noor and Park, 2023; Wang et al.,
2023) despite its lack of temporal information pro-
cessing in videos. Various implementations reflect its
versatility; (Noor and Park, 2023) applies YOLOv8
for pose estimation, whereas (Wang et al., 2023) inte-
grates it for both action localization and recognition.
3 METHODOLOGY
In this section, we outline the methodology employed
in our study, focusing on action localization within the
unique context of a construction site. Subsequently,
we delve into the datasets utilized for our experi-
ments. Our objective is to investigate the effective-
ness of established action recognition techniques in
a scenario marked by additional challenges. To this
end, we look into action recognition problem from
different aspects. In doing so, we provide valuable
insights for future applications in similar dynamic en-
vironments.
3.1 Data Context
One of the pivotal factors influencing the design
and performance of action recognition methods is
the identification of key parameters specific to each
dataset. Notable disparities exist between well-
established action recognition datasets (e.g., JHMDB-
21 (Jhuang et al., 2013), EarthMoving (EM) (Roberts
and Golparvar-Fard, 2019)) and our self-collected
dataset (BoB) in construction sites, including varia-
tions in frame rate and input resolution, as outlined in
Table 1. To understand the impact of these disparities
on the YOWO method, we delve into a comprehen-
sive exploration of these two dimensions (Section 4).
This analysis will provide insights into how unique
characteristics of our dataset may affect the perfor-
mance of the YOWO method.
3.2 Input Source
While the conventional approach to action recog-
nition relies on spatio-temporal information, frame-
based action recognition can be more practical in sce-
narios where real-time response is crucial. As a result,
we conduct an investigation into action recognition
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
594

using the BoB dataset, considering both continuous
video segments and static frame inputs.
3.3 Level of Learning Supervision
In many cases, often a significant amount of unanno-
tated data is available but only labeled data is used
during training. To assess the potential benefits of
unlabeled data in the BoB dataset, we first pre-train
our frame-based model using self-supervised tasks,
and then we conduct supervised training with action
labels. This allows us to compare the performance
of frame-based model pre-trained with unlabeled data
against the model trained solely in a supervised man-
ner without such pre-training.
3.4 Datasets
In addition to our proprietary construction site
dataset, we incorporate publicly available datasets to
scrutinize models under varying parameters such as
input resolution, temporal frequency, and their com-
binations. This not only ensures a robust evaluation
but also aligns with standard practices in the field.
JHMDB-21. The Joint-annotated Human Motion
Data Base (JHMDB-21) (Jhuang et al., 2013) serves
as a classical Action Recognition dataset, featuring
segments dedicated to a single type of action. No-
tably, actions persist throughout each segment, adher-
ing to the dataset’s definition. The dataset encom-
passes 21 action classes revolving around human ac-
tivities (Figure 2).
Earthmoving. The Earthmoving (EM) dataset
(Roberts and Golparvar-Fard, 2019) is composed by
videos depicting vehicles engaged in various common
actions (Figure 3). Frames may exhibit multiple con-
current actions at distinct locations, and at times, no
action at all. Due to its inherent complexity and di-
rect relevance to the setting under study, it serves as
our primary evaluation dataset. The dataset comprises
eight distinct action classes, tailored to excavator and
truck objects.
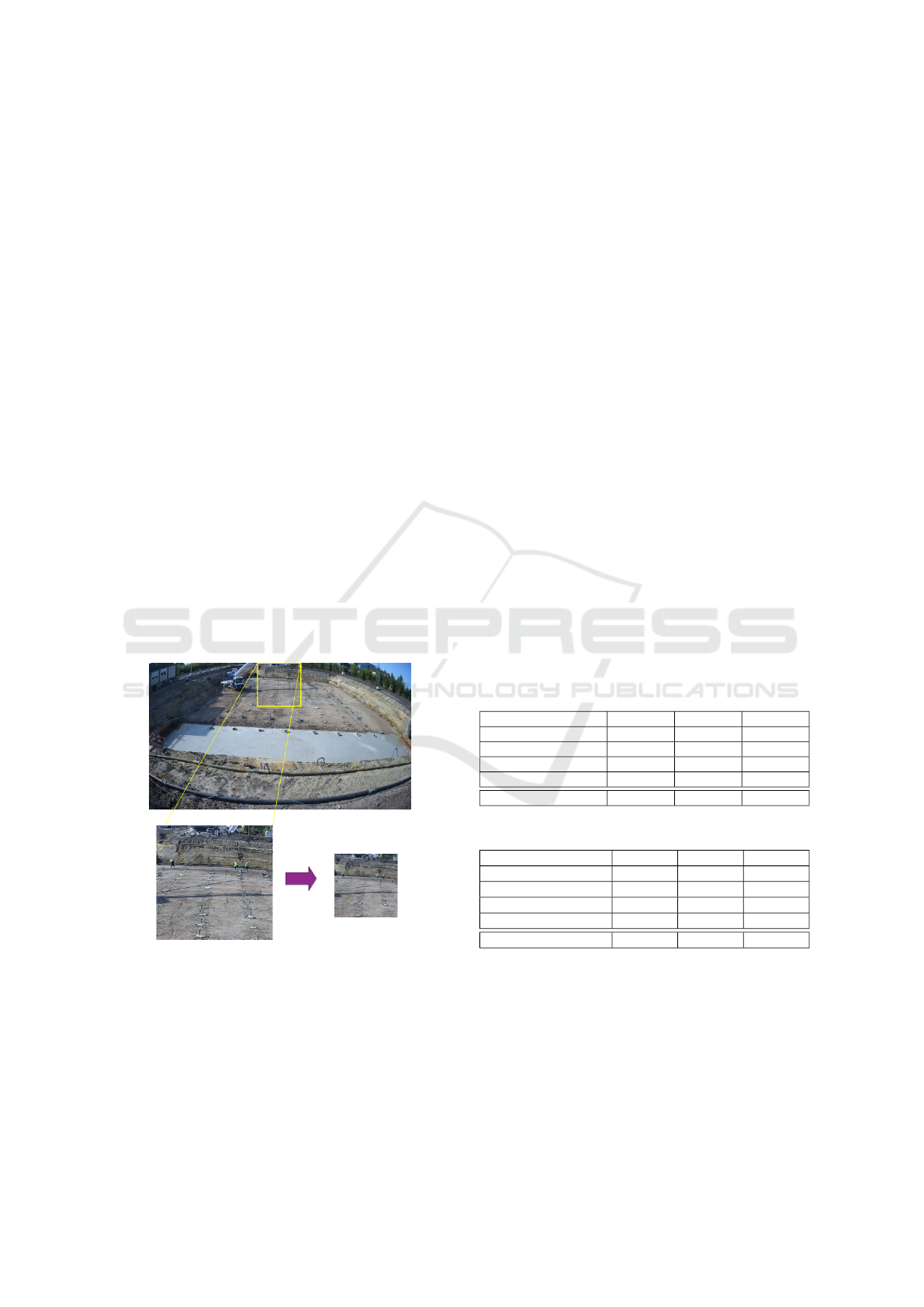
BoB Dataset. The dataset under consideration en-
compasses annotated videos within a construction en-
vironment with distinct characteristics from the previ-
ously mentioned settings. While the dataset contains
a wide array of class labels, it follows a long-tailed
distribution. Consequently, we opt to focus on a sub-
set comprising the four most prevalent actions, collec-
tively constituting 81.5% of all labeled actions. These
actions include working, walking, standing, and flat-
tening concrete. See Figure 1 for visual samples.
In Table 1, you can observe the distinctions be-
tween the datasets considered in this study.
Table 1: Datasets statistics.
BoB JHMDB-21 EarthMoving
Framerate 0.2 fps 20 fps 20 fps
Resolution (px) 3840×2160 320×240 480×272
Avg # actions / frame 4.08±2.17 1 1.72±0.45
Avg action size (px) 60×128 113×175 192×121
# Classes 5 21 7
Figure 1: Cropped 480x480 Region of Interest (ROI) from
the BoB dataset.
The most significant disparities between the
datasets lie in their respective frame rates and resolu-
tions, representing the temporal and spatial axes. We
delve into the influence of these factors on the overall
action localization performance in section 4.
4 EXPERIMENTS
Our experiments can be divided into two phases. In
the first phase (subsection 4.1 and subsection 4.2)
we explore the effects of different scenarios on the
YOWO model (K
¨
op
¨
ukl
¨
u et al., 2019) across two dif-
ferent axes, spatial resolution and temporal resolu-
tion. This serves to extract insights in the behaviour
of YOWO within constrained settings. In the second
phase (subsection 4.3 and subsection 4.4) we apply
both sequence-based and frame-based action recogni-
tion methods on the proprietary dataset to determine
the best solutions.
Mean Average Precision (MAP) is adopted as per-
formance metric throughout our experiments.
4.1 Impact of Spatial Resolution
In construction sites, cameras with high resolution
are commonly placed at a distance, which leads to a
large field-of-view. As multiple actions at distance
are happening within the frame, this leads to lower
data resolution compared to those that characterizes
standard action recognition benchmarks in the field.
In this section, we will study the performance of the
sequence-based model by inducing this issue manu-
ally. We conduct our experiments with both JHMDB-
Figure 2: Frame samples from the JHMDB-21 dataset.
From left to right, the classes are: ’golf’, ’pour’,
’shoot bow’, ’swing baseball’, ’wave’.
Recognizing Actions in High-Resolution Low-Framerate Videos: A Feasibility Study in the Construction Sector
595

Figure 3: Frame samples from the EM dataset. Each sam-
ple includes a number of actions such as ’fill (truck)’, ’idle
(truck)’, ’swing bucket’, ’dump bucket’ and ’load bucket’.
21 and EM, by applying varying amounts of spatial
down-sampling to the input. Our findings show that
small amounts of down-sampling (4× and 16×) do
not significantly impact the prediction scores of the
final models. However at large reductions in resolu-
tion, prediction scores are significantly impacted, al-
beit that some classes are more resistant than others.
Experimental Setup. The original resolutions for
the JHMDB-21 and EM datasets are 320×240 and
480×272, respectively. As the YOWO model re-
quires an input of 224×224, our first goal is to convert
our data to the required resolution. Following con-
ventional approaches, during training we use random
cropping, thus using only part of the input sequence,
but preserving the spatial information within the se-
lected region, while during testing and validation we
down-sample the whole sequence to the target resolu-
tion. This initial down-sampling already reduces the
spatial information within the clip by 35%, respec-
tively 62% depending on the dataset used.
To simulate scenarios with lower spatial resolu-
tions, we applied an additional down-sampling step
on both the training and validation data, by down-
sampling a further 4×, 16×, 64× or 256×. This cor-
responds to a loss in spatial information of at least
84% and 90% for JHMDB-21 and EM, respectively.
Results. Results of the impact of spatial down-
sampling can be found in Table 2 and Table 3. From
these results we can conclude that in the case of
JHMDB-21, a 16× down-sampling results in a small
drop in the average evaluation score, while for the EM
dataset this has already a drastic impact. However, we
notice that certain individual classes can be less af-
fected than others. Based on the achieved results, We
find that there are broadly three different categories of
actions (class labels taken from JHMDB-21):
Category I. Actions that benefit from a small down-
sampling. These classes are characterised by a sig-
nificant increase in mAP at 4x / 16x down-sampled
compared to the baseline. Examples are ‘Sit’, ‘Wave’.
Category II. Actions that have similar or degraded
performance when down-sampling for a small amount
and accelerate performance loss in the extreme down-
sampling regimes. Examples are ‘Catch’, ‘Climb
Stairs’, ‘Jump’. Most of the classes in the studied
datasets follow this pattern.
Category III. Actions that retain performance rel-
atively well even in the extreme down-sampling
regimes. Examples are ‘Brush hair’, ‘Clap’, ’Golf’.
We posit that these disparities arise due to the
beneficial effects of down-sampling, which include
the condensation of features. This leads to more ef-
ficient extraction of visual elements and enhanced
noise reduction. This phenomenon particularly ben-
efits classes in category I. Furthermore, certain ac-
tions exhibit exceptional distinctiveness from others
in the dataset, or possess a high correlation between
the action and background, allowing them to main-
tain their recognizability even under extreme down-
sampling. Noteworthy examples include ’Golf’, char-
acterized by its distinctive motion occurring exclu-
sively on golf terrains, and ’Pullup’, distinguished by
its unique vertical movement absent in other action
classes in JHMDB-21.
Table 2: Average Precision results for spatial down-
sampling on the Earthmoving dataset.
Class
Setting
Original 4× 16×
Idle (Excavator) 82.89 72.85 49.69
Swing Bucket 83.36 82.44 85.40
Load Bucket 84.95 57.34 43.17
Dump Bucket 76.46 72.70 58.86
Move (Truck) 84.26 86.75 58.86
Fill Excavator 73.12 77.21 52.01
Mean 80.84 74.89 58.00
4.2 Impact of Temporal Resolution
In this section we explore the effects of temporal reso-
lution on the performance of the YOWO model. Typi-
cal action detection datasets such as JHMDB-21 have
a high framerate, which might be infeasible to be
adopted for large datasets collected in the construc-
tion space. As such, we delve into two critical tempo-
ral aspects of the YOWO model.
Firstly, we investigate temporal down-sampling,
which is achieved by reducing the frame rate in a
video. Additionally, as a supplementary inquiry, we
explore the transferability of learned representations
across different levels of temporal down-sampling.
Secondly, we scrutinize the impact of buffer size
on the performance of the sequence-based model. The
buffer size determines the available temporal context
for the prediction of the model. While a larger buffer
naturally entails a slower run-time, the relative perfor-
mance gain remains a pivotal question.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
596
Table 3: Average Precision results for Spatial and Temporal down-sampling on the JHMDB-21 dataset.
Spatial Downsampling Temporal Downsampling
Class
Setting
Original 4× 16× 64× 256× Original 2× 4× 8×
Brush Hair 87.19 83.79 95.20 84.77 68.75 87.19 76.03 86.03 74.07
Catch 52.74 35.64 21.77 36.56 23.72 52.74 28.73 17.63 18.66
Clap 88.87 90.56 69.24 80.68 71.78 88.87 77.78 74.99 81.28
Climb Stairs 82.69 90.09 78.70 45.41 5.69 82.69 65.78 64.95 54.87
Golf 99.16 99.31 96.32 89.71 92.23 99.16 98.11 99.37 96.48
Jump 25.35 14.01 28.41 13.21 2.72 25.35 13.02 9.70 10.86
Kick Ball 78.34 65.42 33.98 25.23 4.07 78.34 34.25 29.48 22.45
Pick 74.51 78.03 73.42 39.78 15.47 74.51 59.22 30.97 23.60
Pour 95.72 97.56 89.47 78.99 65.97 95.72 83.65 79.53 82.28
Pullup 99.99 98.81 100.00 93.52 89.09 99.99 100.0 100.0 99.98
Push 86.99 92.65 91.90 70.00 25.65 86.99 80.05 84.38 79.31
Run 37.84 41.85 43.23 31.19 19.48 37.84 27.85 13.78 21.64
Shoot Ball 53.68 52.05 46.76 30.54 6.71 53.68 40.92 43.49 21.94
Shoot Bow 94.08 80.11 92.13 93.87 80.99 94.08 81.80 82.39 86.07
Shoot Gun 79.18 88.05 64.81 75.79 19.41 79.18 49.13 62.71 47.64
Sit 39.56 42.12 55.83 34.47 29.13 39.56 38.06 29.86 18.20
Stand 36.95 40.43 40.64 43.43 17.10 36.95 29.07 16.81 30.06
Swing Baseball 63.99 53.23 85.08 72.89 26.04 63.99 75.36 64.50 49.97
Throw 43.43 50.24 31.12 32.05 21.57 43.43 33.52 15.12 17.50
Walk 54.04 74.35 66.41 63.22 69.11 54.04 59.65 59.33 50.25
Wave 39.95 60.27 38.60 36.93 31.70 39.95 29.93 18.45 30.52
Mean 67.35 68.04 63.91 55.82 37.45 67.35 56.28 51.59 48.46
4.2.1 Experimental Setup
Temporal Down-Sampling. The default buffer of
YOWO is comprised of 16 frames. With k× tempo-
ral down-sampling, we sample the first frame of each
set of k consecutive frames. This results in the buffer
containing information spanning 16 · k frames.
Buffer Size. We explore alternative buffer sizes to
determine its impact on the inference time and per-
formance of the resulting model. The inference time
was quantified by measuring the wall-clock duration
of the forward pass of the neural network. Ancillary
factors, such as data loading time are not factored into
this evaluation. These measurements were conducted
on a system equipped with an RTX3060 GPU, an Intel
Core i7 CPU, and 16 GB of RAM.
4.2.2 Results
Temporal Down-Sampling. In the analysis of the
JHMDB-21 dataset (Table 3), it becomes evident that
certain classes exhibit a resistance to the effects of
temporal down-sampling. These classes displayed a
similar resistance to spatial down-sampling, which
suggests that these classes may possess inherently
stronger distinguishing characteristics compared to
the others. Such distinctiveness could be attributed
to unique visual features, as previously noted. In all
other instances, a noticeable decline in Mean Aver-
age Precision is observed with the reduction of frame
Table 4: Temporal down-sampling on the EM dataset.
Class
Setting
Original 2× 4× 8× 16×
Idle (exc.) 82.89 83.06 27.27 33.52 3.67
Swing Bucket 83.36 80.07 77.82 73.49 57.35
Load Bucket 84.95 67.42 86.34 64.02 75.52
Dump Bucket 76.46 76.89 59.93 47.80 45.48
Move (truck) 84.26 84.12 87.58 28.44 13.58
Fill Truck 73.12 71.66 68.63 57.13 54.38
Mean: 80.84 77.20 67.93 50.73 41.66
Table 5: Buffer size effect on inference time and Mean Av-
erage Precision.
Buffer Size Inference time JHMDB-21 EarthMoving
8 29.38fps 47.15 70.54
16 20.66fps 67.34 80.84
32 14.64fps 54.99 84.09
rate. For the EM dataset (Table 4), we can also see
some classes that are disproportionately affected by
the down-sampling, while other classes suffer a much
more reasonable decrease. We hypothesise that due to
the temporal down-sampling the distinction between
similar classes becomes too difficult to learn for the
network.
Buffer Size. When the buffer size is reduced to 8
frames, there is a significant decrease in the mean Av-
erage Precision metric consistent across all classes in
the JHMDB-21 dataset. Intriguingly, we find similar
outcomes when employing a larger buffer size. In or-
der to ascertain if these trends could be attributed to
Recognizing Actions in High-Resolution Low-Framerate Videos: A Feasibility Study in the Construction Sector
597
hyperparameter choices, we conducted experiments
with additional training epochs. These adjustments,
however do not alter our observations.
Unlike the observations made in the JHMDB-21
dataset, we find a notable performance boost in the
EM dataset when increasing the buffer size to 32
frames. This improvement, while substantial, does
not exhibit the same magnitude of impact as the shift
from an 8-frame buffer to 16 frames. We attribute this
discrepancy to the notably longer average duration of
actions in the EM dataset in comparison to those in
the JHMDB-21 dataset.
In summary, our findings indicate that a larger
buffer size in YOWO does not necessarily enhance
performance; rather, its effectiveness is contingent
upon the average duration of actions within the
dataset.
4.3 Real Settings: Sequence-Based
Given the relatively small average size of actions in
proportion to the frame resolution within the BoB
dataset, a straightforward application of the YOWO
model would be suboptimal. This arises from the ne-
cessity of resizing inputs to a 224×224 dimension, re-
sulting in actions within the images of the BoB dataset
becoming indiscernible. (Effectively, the average ac-
tion would be compressed into a 4×13px window).
Figure 4: A schematic overview of the ROI approach.
Region of Interest (ROI) Extraction. To address
this limitation, we choose to initially extract smaller
candidate action regions from the image and then feed
these regions through the network. This refinement
enhances the spatial resolution that YOWO leverages
in its processing. We will briefly explore three meth-
ods for identifying potential action regions.
Motion Analysis. In this technique, we compute
the pixelwise mean of a sequence. Next, we calculate
the difference between the last frame and the mean,
and extract regions with high deviations.
Object Detection. This method relies on a pre-
trained person detector. We generate detections and
subsequently focus on regions surrounding a person.
Oracle-Based Approach. This strategy is exclu-
sively applicable with access to the ground-truth lo-
calization boxes. In this scenario, we directly select
regions that we know encompass an action.
Experimental Setup. In this section, we analyze the
impact of varying ROI and buffer sizes on the perfor-
mance of YOWO trained on the BoB dataset.
ROI Size. We assess three distinct ROI sizes (Ta-
ble 6): 480 × 480, 640 × 640, and 800 × 800. During
both training and validation we employ the oracle-
based approach to extract ROIs. This approach is nec-
essary during the training phase and by using it during
the validation phase, we can get an upper bound on
the performance of the YOWO model. The choice of
ROI size presents a trade-off: smaller regions capture
finer visual details but may overlook broader contex-
tual information. Our observations listed in Table 6
affirm this intuition. Generally, smaller window sizes
yield better results, as they entail less loss of pixel
information during down-scaling to 224 × 224. No-
tably, the ’Walking’ class stands out, performing op-
timally at the intermediate resolution. This exception
likely arises from the added contextual information.
Table 6: Impact of the ROI size on the BoB dataset.
480×480 640×640 800×800
Flatten Out Concrete 70.43 63.26 46.24
Walking 37.94 46.61 37.02
Standing 57.60 43.56 41.55
Working 65.22 58.45 34.71
Mean 57.78 52.97 39.88
Table 7: Impact of buffer size on the BoB dataset.
Average Precision 2 frames 4 frames 8 frames
Flatten Out Concrete 57.80 63.26 64.52
Walking 31.78 46.61 40.54
Standing 43.14 43.56 45.06
Working 62.74 58.45 64.23
Mean 48.87 52.97 53.59
Buffer Size. Following the experiments of subsec-
tion 4.2 We investigate three different buffer sizes: 2
frames, 4 frames, and 8 frames. We find that the prac-
tical difference between a buffer of 4 frames and 8
frames is marginal (Table 7). While there is a no-
table performance boost with more than 2 frames of
buffer size, the improvement levels off. We attribute
this marginal difference to the lower framerate of the
BoB dataset compared to the other datasets, as addi-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
598

Table 8: Number of samples for labeled and unlabeled sets
in BoB dataset.
Datasets Train Valid Test
Workers 9251 1254 2662
Background 26500 2900 None
Merged Workers + Background
Separated Workers + Background
Table 9: Performance of YOLOv8n on BoB dataset for su-
pervised and self-supervised training.
Method Flatten Walking Standing Working Mean
SL 0.703 0.374 0.577 0.727 0.595
CL (Separated) 0.713 0.309 0.508 0.717 0.565
CL (Merged) 0.700 0.322 0.496 0.717 0.429
CL (Workers) 0.587 0.281 0.377 0.599 0.461
SC (Separated) 0.516 0.22 0.241 0.533 0.377
tional temporal context may not contribute significant
relevant information.
4.4 Real Settings: Frame-Based
Here we focus on action recognition based solely on a
single frame. While this approach ignores the tempo-
ral information it makes real-time action recognition
possible. To this end, we benefit from latest object
detector in YOLO series (YOLOv8). As for action re-
gion we opt for 480×480 pixels since it yield the best
results in sequence-based approach 4.3. For the ex-
traction of the region of interest (ROI), we opt for the
oracle-based approach for train/val/test splits of BoB
dataset since we have access to ground-truth bound-
ing boxes. In case of inferencing on a new data, we
leverage an object detector to extract ROIs based on
detected person instances. Additionally, no resize is
needed to be applied since 480×480 regions can be
directly fed into the model.
Experimental Setup. In this method, we operate on
individual frames rather than sequences. The number
of samples for labeled data (supervised training) and
unlabeled data (self-supervised training) is shown in
table 8.
We consider two different training strategies: Su-
pervised training, which involves using data with ac-
tion labels from workers to train the model in a sin-
gle stage; and Self-Supervised Pre-training, which
involves pre-training the backbone (feature extractor
part of YOLOv8) and then freezing it. Subsequent
layers are then trained in a supervised manner with
action labels (working, walking, ...) per frame.
Adopting supervised learning techniques will al-
low us assess the level to which we can harness un-
labeled samples in the BoB dataset. This process in-
volves training on different subsets of data:
Workers. This group consists of data same as the
labeled set, but without their associated labels.
Background. We generate random crops from
each unlabeled frame of the BoB dataset. To ensure
that these background crops do not contain workers,
we employ a pre-trained person detector (YOLOv8).
Merged. produced by blending and intermixing
the Workers and Background sets.
Separated. Here, we consider both Background
and Workers categories, but refrain from mixing them
together during the training process.
We also investigate two self-supervision vari-
ants: Contrastive Learning and Supervised Con-
trastive Learning (SupCon):
Contrastive Learning. For each batch we create
a corresponding batch from a different view. Each
image in the input batch (referred to as the anchor) is
paired with its corresponding view as the positive pair,
while all other pairs are considered negative. There is
a difference in pair construction for merged and sep-
arated sets in our BoB dataset as follows. For Sep-
arated negative pairs are selected from the different
group (Workers vs Background), while for Merged
this constraint is not applied.
SupCon. Unlike contrastive learning, SupCon
makes use of high-level labels (background vs work-
ers). Therefore, instead of having a single positive
pair for each image in the batch, all samples from the
same class are considered as positive pairs.
Results. Based on the results presented in Table 9, we
observe that supervised learning (SL) yields the high-
est performance. Contrastive learning (CL) demon-
strates the second-best performance where classes are
distinct, and only samples from one class are pushed
away per batch. However, there is a noticeable decline
in performance when employing SupCon (SC).
The preference for supervised learning stems from
the robust pre-training of YOLOv8 on extensive
datasets like COCO, providing a strong foundation for
a wide range of vision tasks. On the other hand, when
considering the unlabeled data from the BoB dataset,
there exist subtle differences within each class (work-
ers and background). This leads to only a moderate
impact of self-supervised pre-training.
Regarding the performance drop observed with
SupCon, we formulate two hypotheses to justify the
observed results. First, the distinction between work-
ers and background may lack a defined separation like
cats and dogs. For instance, even in samples from
the workers class, a good proportion of the pixels be-
long to the background. Second, our ultimate objec-
tive is action recognition, rather than the classifica-
tion of workers versus background. As a result, the
second stage of training may not align perfectly with
the supervised information incorporated during pre-
training.
Recognizing Actions in High-Resolution Low-Framerate Videos: A Feasibility Study in the Construction Sector
599

5 CONCLUSION
Our study indicates that both spatial and tempo-
ral down-sampling generally lead to reduced perfor-
mance, though spatial down-sampling shows some
dataset-dependent improvements. Additionally, the
effectiveness of buffer size varies with the duration of
action and there is no optimal global value for that.
For pre-training, we did not observe improvements
from conventional self-supervision methods construc-
tion contexts. Finally, our results highlight the poten-
tial of frame-based approaches for future investiga-
tion of action recognition.
ACKNOWLEDGEMENTS
This research is part of the BoB project, an ICON
project cofunded by Flanders Innovation & En-
trepreneurship (VLAIO) and imec, with project no.
HBC.2021.0658. The data of the construction site
was provided by Willemen Groep, a Belgian con-
struction group, with support from AICON inc.
REFERENCES
Carreira, J. and Zisserman, A. (2017). Quo vadis, action
recognition? a new model and the kinetics dataset. In
CVPR, pages 6299–6308.
Chen, L., Ma, N., Wang, P., Li, J., Wang, P., Pang, G., and
Shi, X. (2020). Survey of pedestrian action recog-
nition techniques for autonomous driving. Tsinghua
Science and Technology, 25(4):458–470.
Fathi, A. and Mori, G. (2008). Action recognition by learn-
ing mid-level motion features. In CVPR, pages 1–8.
Feichtenhofer, C., Fan, H., Malik, J., and He, K. (2019).
Slowfast networks for video recognition. In ICCV.
Feichtenhofer, C., Pinz, A., and Wildes, R. P. (2017).
Spatiotemporal multiplier networks for video action
recognition. In CVPR.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. In CVPR, pages 580–587.
Huang, Z., Wan, C., Probst, T., and Van Gool, L. (2017).
Deep learning on lie groups for skeleton-based action
recognition. In CVPR, pages 6099–6108.
Ishioka, H., Weng, X., Man, Y., and Kitani, K. Single cam-
era worker detection, tracking and action recognition
in con-struction site. In ISARC.
Jhuang, H., Gall, J., Zuffi, S., Schmid, C., and Black, M. J.
(2013). Towards understanding action recognition. In
ICCV, pages 3192–3199.
Kar, A. and Prabhakaran, B. (2017). A convnet-based archi-
tecture for semantic labeling of 3d lidar point clouds.
In IROS. IEEE.
K
¨
op
¨
ukl
¨
u, O., Wei, X., and Rigoll, G. (2019). You only
watch once: A unified cnn architecture for real-time
spatiotemporal action localization. arXiv:1911.06644.
Li, Z. and Li, D. (2022). Action recognition of construction
workers under occlusion. Journal of Building Engi-
neering, 45:103352.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In ECCV.
Noor, N. and Park, I. K. (2023). A lightweight skeleton-
based 3d-cnn for real-time fall detection and action
recognition. In IEEE/CVF, pages 2179–2188.
Qiu, Z., Yao, T., and Mei, T. (2017). Learning spatio-
temporal representation with pseudo-3d residual net-
works. In ICCV, pages 5533–5541.
Ramezani, M. and Yaghmaee, F. (2016). A review on hu-
man action analysis in videos for retrieval applica-
tions. Artificial Intelligence Review, 46:485–514.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection. In CVPR.
Reis, D., Kupec, J., Hong, J., and Daoudi, A.
(2023). Real-time flying object detection with yolov8.
arXiv:2305.09972.
Roberts, D. and Golparvar-Fard, M. (2019). End-to-end
vision-based detection, tracking and activity analysis
of earthmoving equipment filmed at ground level. Au-
tomation in Construction, 105:102811.
Rodomagoulakis, I., Kardaris, N., Pitsikalis, V., Mavroudi,
E., Katsamanis, A., Tsiami, A., and Maragos, P.
(2016). Multimodal human action recognition in as-
sistive human-robot interaction. In ICASSP.
Si, C., Chen, W., Wang, W., Wang, L., and Tan, T. (2019).
Skeleton-based action recognition with spatial reason-
ing and temporal stack learning. In CVPR.
Simonyan, K. and Zisserman, A. (2014). Two-stream con-
volutional networks for action recognition in videos.
NIPS, 27.
Tran, D., Bourdev, L., Fergus, R., Torresani, L., and Paluri,
M. (2015). Learning spatiotemporal features with 3d
convolutional networks. In ICCV, pages 4489–4497.
Tran, D., Wang, H., Torresani, L., Ray, J., LeCun, Y., and
Paluri, M. (2018). A closer look at spatiotemporal
convolutions for action recognition. In CVPR.
Wang, H. and Schmid, C. (2013). Action recognition with
improved trajectories. In PICCV, pages 3551–3558.
Wang, Z., Liu, Y., Duan, S., and Pan, H. (2023). An ef-
ficient detection of non-standard miner behavior us-
ing improved yolov8. Computers and Electrical En-
gineering, 112:109021.
Weinzaepfel, P., Harchaoui, Z., and Schmid, C. (2015).
Learning to track for spatio-temporal action localiza-
tion. In ICCV, pages 3164–3172.
Yan, S., Xiong, Y., and Lin, D. (2018). Spatial temporal
graph convolutional networks for skeleton-based ac-
tion recognition. In AAAI.
Zhang, D., He, L., Tu, Z., Zhang, S., Han, F., and Yang, B.
(2020). Learning motion representation for real-time
spatio-temporal action localization. Pattern Recogni-
tion, 103:107312.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
600
