
FuDensityNet: Fusion-Based Density-Enhanced Network for Occlusion
Handling
Zainab Ouardirhi
1,2 a
, Otmane Amel
1 b
, Mostapha Zbakh
2 c
and Sidi Ahmed Mahmoudi
1 d
1
Computer and Management Engineering Department, FPMS, University of Mons, Belgium
2
Communication Networks Department, ENSIAS, Mohammed V University in Rabat, Morocco
Keywords:
Object Detection, Occlusion Handling, Voxelization, Density-Aware, Multimodal Fusion.
Abstract:
Our research introduces an innovative approach for detecting occlusion levels and identifying objects with
varying degrees of occlusion. We integrate 2D and 3D data through advanced network architectures, utilizing
voxelized density-based occlusion assessment for improved visibility of occluded objects. By combining 2D
image and 3D point cloud data through carefully designed network components, our method achieves superior
detection accuracy in complex scenarios with occlusions. Experimental evaluation demonstrates adaptability
across concatenation techniques, resulting in notable Average Precision (AP) improvements. Despite ini-
tial testing on a limited dataset, our method shows competitive performance, suggesting potential for further
refinement and scalability. This research significantly contributes to advancements in effective occlusion han-
dling for object detection methodologies. The abstract and conclusion highlight the substantial increase in AP
achieved through our model.
1 INTRODUCTION
Accurately recognizing objects in challenging con-
ditions is a fundamental concern in computer vision
and deep learning, impacting applications like au-
tonomous driving and surveillance systems (Pandya
et al., 2023). The presence of occlusions, where ob-
jects are partially or wholly obscured, poses a signif-
icant challenge by concealing vital visual cues (Gu-
nasekaran and Jaiman, 2023). This paper addresses
the critical need for robust object recognition in the
face of occlusions.
Researchers have historically tackled occlusion
challenges using techniques like sliding windows and
template matching, but deep learning has ushered in
innovative strategies to comprehend and mitigate oc-
clusions (Ye et al., 2023b). Despite advancements,
there remains a research gap in effectively handling
occlusions (Ouardirhi et al., 2022), specifically in
adapting to varying degrees of occlusion. Our con-
tribution involves developing a novel technique that
adjusts the detection mechanism based on occlusion
a
https://orcid.org/0000-0001-8302-7273
b
https://orcid.org/0009-0005-5470-362X
c
https://orcid.org/0000-0002-1408-3850
d
https://orcid.org/0000-0002-1530-9524
severity and rate (Nguyen et al., 2023).
The paper explores novel network designs for ob-
ject detection and introduces methods for occlusion
handling, including image preprocessing, voxeliza-
tion, and feature fusion. A key contribution is the
Voxel Density-Aware approach (VDA) for estimat-
ing occlusion rates, enhancing occlusion-aware object
recognition. The proactive assessment of occlusion
presence before engaging the detection network opti-
mizes detection performance across diverse scenarios
(Steyaert et al., 2023).
The proposed model’s architecture and functional-
ities are detailed, accompanied by thorough tests and
assessments on benchmark datasets. Results show-
case improvements in detection accuracy, especially
in challenging scenarios dominated by occlusions.
Subsequent sections explore related research, trace
the evolution of occlusion handling techniques, and
offer a detailed exploration of our proposed strategy,
including architectural insights, fusion methods, and
experimental settings. The conclusion emphasizes the
significance of adaptive occlusion handling, provid-
ing insights into potential future directions.
632
Ouardirhi, Z., Amel, O., Zbakh, M. and Mahmoudi, S.
FuDensityNet: Fusion-Based Density-Enhanced Network for Occlusion Handling.
DOI: 10.5220/0012425400003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 3: VISAPP, pages
632-639
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

2 RELATED WORK
This section reviews current research on occlusion
handling in object detection, exploring three main
themes: 2D Object Detection in Occluded Scenes,
Point Cloud-based 3D Object Detection, and Multi-
Modal Fusion for Occlusion Handling.
2D Object Detection in Occluded Scenes. Re-
searchers investigate the resilience of Deep Convolu-
tional Neural Networks (DCNNs) in handling partial
occlusions in 2D object recognition. Two-stage meth-
ods, inspired by the R-CNN series, employ an initial
region proposal step followed by object refinement
(Bharati and Pramanik, 2020; Zhang et al., 2021).
Single-stage networks, such as YOLO series, SSD,
and OverFeat, streamline the process by directly re-
gressing bounding boxes without an explicit proposal
step. However, their performance with occlusions is
limited.
Occlusion-handling techniques have emerged to
enhance robustness. Cutmix (Yun et al., 2019) uses
a regularization method to obstruct areas in train-
ing images, improving resilience against occlusions.
CompNet (Kortylewski et al., 2020) blends DCNN
features with a dictionary-based approach, address-
ing occlusion challenges. DeepID-Net (Ouyang et al.,
2015) introduces deformable pooling layers, enhanc-
ing model averaging efficacy for robust feature rep-
resentation. SG-NMS in the Serial R-FCN network
refines object detection through a heuristic-based ap-
proach, combining bounding boxes and suppressing
overlaps (Yang et al., 2020).
Point Cloud-Based 3D Object Detection. In point
cloud prediction, two prominent research tracks em-
phasize efficiency. One approach involves projecting
point clouds onto 3D voxels, as seen in VoxNet (Mat-
urana and Scherer, 2015), PV-RCNN++ (Shi et al.,
2020) and SECOND (Yan et al., 2018). These models
use strategies like cubic window attention on voxels
or accelerated sparse convolutions to enhance compu-
tational efficiency. LiDARMultiNet (Ye et al., 2023a)
represents a significant advancement by integrating
various forms of supervision, unifying semantic seg-
mentation, panoptic segmentation, and object recog-
nition.
In contrast, PointNet (Zhao et al., 2017) fo-
cuses specifically on 3D point clouds, extracting
permutation-invariant characteristics and contributing
to the robustness of point-based 3D networks. To ad-
vance this research, PointNet++ (Qi et al., 2017) in-
troduces a hierarchical neural network that progres-
sively captures local characteristics at multiple con-
textual scales.
Multi-Modal Fusion for Occlusion Handling. The
evolution of 3D sensors and their applications in en-
vironmental understanding has driven extensive re-
search on 3D object detection. The fusion of Li-
DAR and camera data, explored in works such as (Li
et al., 2022b) and (Wang et al., 2021), has particularly
gained attention. Fusion techniques typically fall into
three categories: input-level (early fusion), feature-
level, or decision-level (late fusion) methods (Li et al.,
2023).
Notably, a subset of studies focuses on multi-
modal feature fusion during proposal generation and
Region of Interest (RoI) refinement. Pioneering
works like MV3D (Chen et al., 2017) and AVOD
(Ku et al., 2018) employ multi-view aggregation for
multi-modal detection, emphasizing the importance
of integrating information from different perspectives.
Other studies, as explored in (Chen et al., 2023), adopt
the Transformer decoder as the RoI head, facilitating
effective multi-modal feature fusion. These investi-
gations collectively underscore the diverse methods
aiming to seamlessly integrate LiDAR-camera data
for enhanced object detection, particularly in address-
ing challenges posed by occlusions.
3 FuDensityNet
This section unveils our novel approach to address-
ing occlusion challenges within deep learning frame-
works throughout the object detection process. Our
Voxel Density Aware (VDA) method, leverages the
point density derived during voxelization. This
density-driven insight guides the selection of an op-
timal model for precise object detection. Simultane-
ously, we introduce our multimodal fusion network,
strategically designed to synergize the strengths of
both 2D and 3D features. Illustrated in Figure 1, this
integration serves as a pivotal component of our pro-
posed approach.
3.1 Occlusion Rate Assessment Using
Density Analysis
In this subsection, we present our innovative ap-
proach, Occlusion Rate Assessment via Density
Analysis. This technique employs density-based
analysis to quantify occlusion levels, enhancing ob-
ject detection accuracy.
Density-Aware Voxel Grid Extraction. Our method
utilizes point cloud density data to gauge occlusion
levels in a 3D scene. By measuring point density in
specific regions, we discern the extent of occlusion.
Higher point density values signify greater occlusion,
FuDensityNet: Fusion-Based Density-Enhanced Network for Occlusion Handling
633
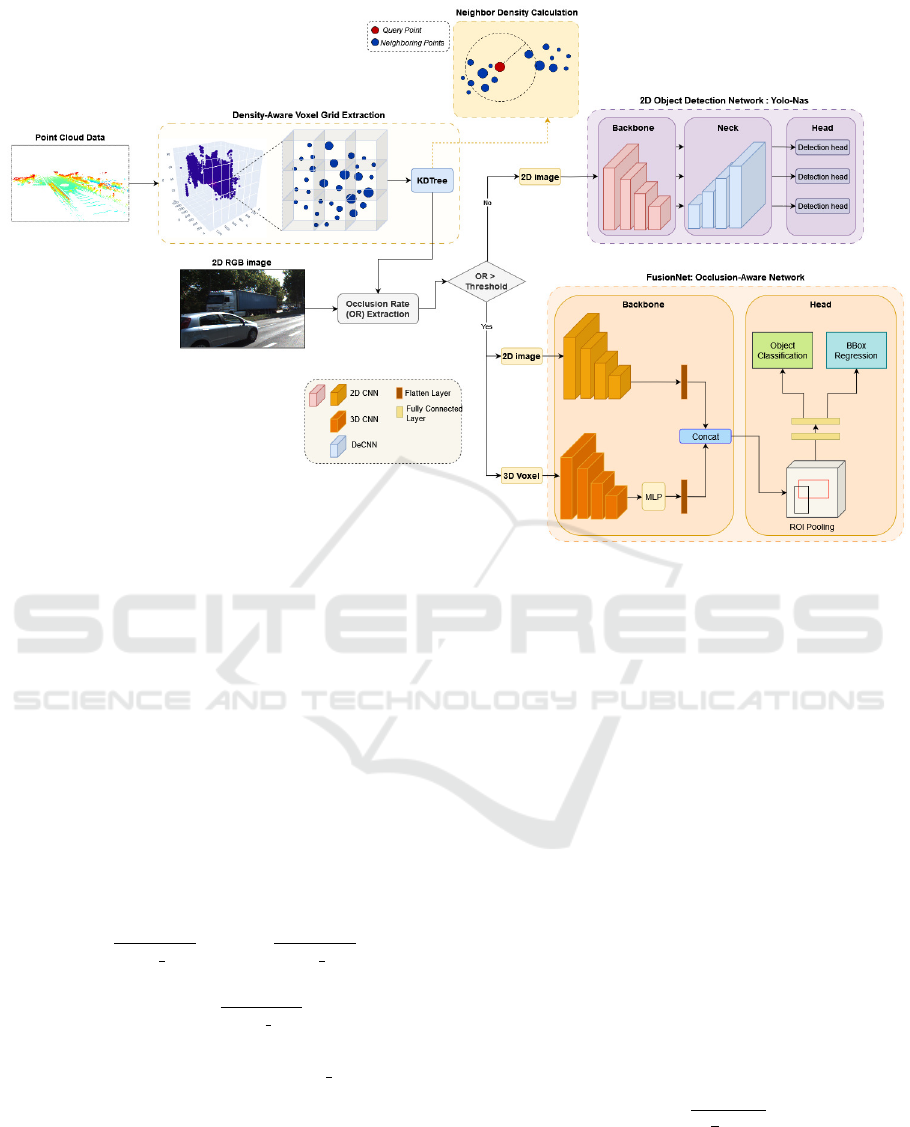
Figure 1: FuDensityNet Workflow: Point cloud voxelization extracts occluded points based on density. High-density areas
trigger neighbor density computation via KDTree. The computed occlusion rate (OR) is compared to a threshold; surpassing
it deploys FusionNet with voxelized point cloud and 2D image. Below the threshold, YOLO-NAS is used. FuDensityNet
optimally combines FusionNet and YOLO-NAS for accurate detection across scenarios.”.
while lower values indicate smaller occlusions, as de-
picted in Figure 2.
We represent 3D points as P
i
= (x
i
, y
i
, z
i
) with i
ranging from 1 to N, where N is the total point count.
Utilizing a 3D grid with discrete cells or voxels, each
defined by center coordinates (x
j
, y
j
, z
j
) for j voxel
indices, we assign each point P
i
to the closest voxel.
The voxel index ( j
x
, j
y
, j
z
) is determined by finding
the closest voxel’s coordinates (x
j
, y
j
, z
j
) to P
i
. This
is done using the formula:
j
x
=
x
i
− x
min
voxel size
, j
y
=
y
i
− y
min
voxel size
and j
z
=
z
i
− z
min
voxel size
(1)
where the voxel grid’s minimum coordinates are
denoted as (x
min
, y
min
, z
min
), and voxel size repre-
sents the dimension of each voxel. Density computa-
tion for each voxel (x
j
, y
j
, z
j
) involves counting points
within its boundaries. The density D
j
for voxel is cal-
culated as:
D
j
=
N
∑
i=1
χ
j
(P
i
) (2)
where χ
j
(P
i
) is an indicator function that returns 1 if
point P
i
falls within voxel (x
j
, y
j
, z
j
), and 0 otherwise.
Neighbor Density Calculation. The spatial distri-
bution revealed by initial density analysis prompts
an examination of surrounding areas through neigh-
bor density computation. This exploration distin-
guishes between dense patches with gaps, indicating
potential occlusions, and continuous, concentrated ar-
eas suggestive of other occlusion scenarios (Figure
1). Leveraging a KDTree (Bentley, 1975) structure
for efficiency, our technique involves constructing a
KDTree from the entire point cloud, facilitating swift
nearest neighbor searches. For voxels exceeding the
density threshold (D
voxel
), a KDTree query identifies
points within a radius (r) around the voxel, determin-
ing D
neighbors
. The neighbor density (ND
voxel
), calcu-
lated as the ratio of D
neighbors
to the sphere’s volume
with radius r, is expressed in Equation 3:
ND
voxel
=
D
neighbors
4
3
πr
3
(3)
Comparing ND
voxel
with D
voxel
yields insights
into the spatial distribution around the voxel. Sub-
stantially lower ND
voxel
signals dispersed high-
density regions, implying potential occlusions with
gaps. Conversely, close ND
voxel
and D
voxel
values
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
634

Figure 2: Visualizing Occlusion Intensity in 3D Scenes with
Density-Aware Voxel Grid : The voxelized point cloud data,
showcasing varying point densities in size and color to rep-
resent different occlusion intensities.
suggest a contiguous, dense region indicative of oc-
cluded objects in proximity. This assessment aids
in distinguishing occlusion scenarios, facilitating in-
formed decisions on occlusion handling (Figure 3).
Occlusion Rate Determination and Model Selec-
tion.The density-based metric guides the decision to
employ our occlusion handling network or established
detection models. Extracting the occlusion rate (OR)
involves comparing point density in specific regions,
using the metric, to a predefined threshold based on
benchmarks like KITTI (Geiger et al., 2012). If OR
exceeds the threshold, our occlusion handling net-
work is used; otherwise, a state-of-the-art detection
model ensures optimal object detection.
3.2 Network Architecture for Occlusion
Handling
Our network seamlessly integrates 2D image and 3D
point cloud data, forming a holistic solution for robust
object detection, even in challenging occluded scenar-
ios.
Backbone Networks. Our choice of backbone net-
works, detailed in Section 4.2.1, is based on exten-
sive experimentation. For the 2D image backbone,
we strategically selected a fine-tuned ResNet-50 (He
et al., 2016) for its exceptional performance in han-
dling occlusions during feature extraction. Although
YOLO outperformed it in the overall model compar-
ison, we chose ResNet-50 for feasibility reasons. Si-
multaneously, our decision for the point cloud back-
bone, VoxNet (Maturana and Scherer, 2015), was
driven by its ability to seamlessly handle occlusion
complexities by transforming voxelized point cloud
data into hierarchical features. VoxNet exhibited ro-
bust performance in capturing spatial information,
crucial for accurate object identification in partially
(a) 2D RGB image. (b) Point Cloud Data. (c) Voxelized Data.
Figure 3: Visualizing Data Pre- and Post-Voxel Density
Aware Approach: (a) Input image with partial occlusion,
(b) corresponding point cloud data reveals gaps between oc-
cluded objects, (c) post-voxelization with density indicates
increased point density along the line of sight. Heightened
density in the red box signifies potential occlusion, with
larger points in a distinct color denoting the occluded part.
occluded scenarios.
Multimodal Fusion Method. To effectively address
occlusion through multimodal fusion, we employ the
Low-rank Multimodal Tensor Fusion (LMF) method.
LMF enhances traditional tensor fusion (Zadeh et al.,
2017) by minimizing computational costs without
compromising performance through the use of low-
factor weights. Our experiments (Section 4.2.3) high-
light LMF as the optimal choice, showcasing superior
occlusion handling efficacy compared to other fusion
methods. Its ability to preserve critical information
while minimizing computational overhead is a key
component in our approach to robust object detection
in occluded scenarios.
Detection Head. After integrating the backbone net-
works, the key step involves applying the Faster R-
CNN (F-RCNN) detection head. This begins with a
RoI pooling layer, mathematically represented as:
ROI Pooling(x, R) =
1
|R|
∑
i∈R
x
i
, (4)
ensuring effective feature alignment for spatial in-
formation extraction. The pooled features then pass
through two fully connected layers (FC
1
and FC
2
),
expressed as:
FC
1
(x) = σ(W
1
x + b
1
), (5)
FC
2
(x) = σ(W
2
FC
1
(x) + b
2
), (6)
facilitating the learning of intricate data relationships.
These learned features contribute to predicting class
probabilities (P
class
) and bounding box regressions
(P
2DBox
), given by:
P
class
= softmax(FC
2
(x)), (7)
P
2DBox
= FC
2DBox
(x), (8)
By seamlessly integrating backbone networks
with the F-RCNN head, our approach provides a ro-
bust solution tailored for real-world scenarios with
occlusion challenges.
FuDensityNet: Fusion-Based Density-Enhanced Network for Occlusion Handling
635

4 MAIN RESULTS
In this section, we present key results. We outline our
experimental setup, compare 2D networks for the op-
timal backbone, evaluate 3D backbones for Fusion-
Net selection, and conduct comprehensive compar-
isons between FusionNet, occlusion handling tech-
niques, and our approach, FuDensityNet. FuDensi-
tyNet strategically combines FusionNet and a spe-
cialized object detection approach based on occlusion
levels for enhanced accuracy in diverse scenarios.
4.1 Experimental Setup
Resources. We utilized Google’s Tensor Process-
ing Unit (TPU) v2, a specialized hardware acceler-
ator with 35GB RAM, for high-performance machine
learning and deep learning tasks. Datasets. Our anal-
ysis involves FuDensityNet evaluation at three lev-
els. First, on KITTI2D (Geiger et al., 2012) and
CityPersons (Zhang et al., 2017) for benchmarking
the 2D backbone. Second, on KITTI3D (Geiger et al.,
2012) and OccludedPascal3D (Xiang et al., 2014) to
compare 3D network performances for assessing the
3D backbone. We conduct a comparison analysis of
FuDensityNet versus alternative occlusion handling
methods and our occlusion-aware network, clarifying
the beneficial impact of our VDA strategy on detec-
tion accuracy.
4.2 Results and Analysis
4.2.1 Comparative Analysis on the 2D
Backbones
In this section, we conduct a comparative analysis
of 2D backbone networks, optimizing for inference
speed and accuracy in object detection across vari-
ous scenarios based on the degree of occlusion. Our
models were initially trained on the KITTI2D dataset,
containing 7481 training images. The results in Ta-
ble 1 present AP calculated on testing data from two
datasets: 7481 testing images from KITTI2D and
5000 testing images from the CityPersons dataset.
1. YOLO-NAS for Low to No Occlusion. In low to
no occlusion scenarios, our analysis (Table 1) des-
ignates YOLO-NAS as the optimal model for ef-
ficient and accurate object detection. Recognized
for its lightweight architecture, YOLO-NAS pro-
vides rapid and precise detection, making it a top-
performing choice in situations with minimal oc-
clusion. This strategic selection optimizes both
speed and accuracy without the need for complex
feature extraction.
2. Custom Backbone for Moderate to High Oc-
clusion. Our analysis (Table1) consistently high-
lights ResNet50 as a superior 2D backbone for ob-
ject detection. Renowned for its advanced feature
extraction, ResNet50 significantly contributes to
addressing occlusion challenges. Augmenting
this with our chosen 3D backbone creates a cus-
tomized model, enhancing resilience against oc-
cluded objects.
4.2.2 Comparative Analysis on the 3D
Backbones
Our analysis (Table 2) demonstrates VoxNet’s supe-
rior performance across KITTI3D and OccludedPas-
cal3D datasets. Despite training on the KITTI3D
dataset with 7481 point clouds, the results in Ta-
ble 2 showcase AP on testing data from KITTI3D
(7481 point clouds) and OccludedPascal3D (2073
point clouds). VoxNet, with a limited dataset of 100
point clouds, achieves a notable 40% AP, underscor-
ing its potential for robust 3D object detection. This
motivates our choice to leverage VoxNet’s strengths
for enhanced object detection in occluded scenarios.
4.2.3 Comparative Analysis on Fusion
Techniques
In our multimodal fusion exploration for occlusion
handling, we investigated four late fusion methods:
Table 1: Object Detection AP Results for KITTI 2D and CityPersons Datasets.
Model
AP(%) (KITTI 2D) (CityPersons)
Car Pedestrian Cyclist Person
F-RCNN (Sharma et al., 2023) 71.2 67.4 66.7 85.7
ResNet50-F-RCNN (He et al., 2016) 76.8 69.4 67.8 87.3
MobileNetv2-F-RCNN (Sandler et al., 2018) 57.2 53.8 48.5 79.3
vgg16-F-RCNN (Simonyan and Zisserman, 2014) 59.2 58.4 47.6 80.9
SSD (Liu et al., 2016) 66.7 64.4 58.1 84.1
RetinaNet (Lin et al., 2017) 65.6 63.3 58.4 82.5
YOLOv5s (Sozzi et al., 2022) 89.9 87.7 83.8 88.9
YOLOv6s (Li et al., 2022a) 92.2 88.1 85.7 92.1
YOLOv7 (Wang et al., 2023) 90.2 86.5 84.1 90.5
YOLOv8s (Huang et al., 2023) 93.7 91.3 87.2 93.7
YOLO-NAS (Sharma et al., 2023) 95.4 92.8 91.1 95.0
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
636

(a) YOLO-NAS. (b) FusionNet-Our. (c) FuDensityNet-Our.
(d) CompNet. (e) MV3D. (f) YOLO3D.
Figure 4: Visual Examples for Comparing Occlusion Handling in Object Detection Models Using KITTI Dataset.
Table 2: Object Detection AP Results on OccludedPascal3D and KITTI3D Datasets for Different Models.
Model AP (%) (OccludedPascal3D) AP(%) (KITTI3D)
aeroplane
bicycle
boat
bottle
bus
car
motorbike
train
tvmonitor
Car
Pedestrian
Cyclist
SECFPN (Radosavovic et al., 2020) 28.8 27.3 27.7 27.0 28.3 28.8 28.5 27.0 26.0 36.8 34.2 31.5
PointNet++ (Qi et al., 2017) 27.6 26.1 26.5 25.9 27.1 27.6 27.5 26.0 25.0 34.7 32.1 29.4
SSN (Zhu et al., 2020) 26.4 24.9 25.3 24.8 26.0 26.4 26.6 25.0 24.0 32.6 30.0 27.3
ResNeXt-152-3D (He et al., 2016) 23.9 22.5 23.0 22.6 23.6 23.9 24.6 23.0 22.0 22.4 20.2 18.1
VoxNet (Maturana and Scherer, 2015) 30.0 28.5 29.7 28.1 29.5 30.0 29.6 28.0 27.0 40.0 38.5 35.7
Table 3: Comparison analysis of fusion methods.
Fusion Method
AP(%) (KITTI 3D)
Car Pedestrian Cyclist
Concatenation 40.5 39.3 29.6
Arithmetic Fusion (Addition) 38.5 36.4 27.4
Arithmetic Fusion (multconcat) 42.3 38.8 29.4
Sub-space Concat 41.3 38.2 29.1
Low Rank Tensor Fusion 43.5 39.9 31.4
Concatenation (Ramachandram and Taylor, 2017),
Arithmetic Fusion (Addition (RODRIGUES et al.,
), Multconcat (Amel and Stassin, 2023)), Sub-space
Concat (Ramachandram and Taylor, 2017), and Low
Rank Tensor Fusion (LMF) (Zadeh et al., 2017).
LMF, detailed in Section 3.2, minimizes computa-
tional cost while exhibiting notable scalability. Table
3 illustrates LMF’s (Zadeh et al., 2017) superiority
in generating multimodal representations that effec-
tively capture cross-modality interactions to address
occlusion challenges. Results, though with a limited
dataset, show promise, prompting the need for further
comprehensive assessment.
4.2.4 Comparative Analysis of Global Network
The evaluation of FuDensityNet against YOLO3D
and MV3D reveals its superior performance across
various occlusion levels (Table 4). YOLO-NAS ex-
cels in low occlusion scenarios, achieving high AP
values (52.3% in Easy, 51.2% in Moderate, and
49.1% in Hard for Car detection).
FuDensityNet strategically combines YOLO-
NAS’s strengths in low occlusion with FusionNet’s
capabilities in moderate to high occlusion, yielding
competitive AP values. For Car detection, FuDensi-
tyNet outperforms YOLO-NAS in the Easy category
(52.3%) and maintains strong performance in Mod-
erate (39.9%) and Hard (36.6%) occlusion scenarios.
Similar trends are observed for Pedestrian and Cyclist
detection.
FuDensityNet’s proficiency in leveraging mul-
timodal data contributes to its competitive perfor-
mance, particularly in conjunction with YOLO-NAS
(Figure 4). These results validate our approach and
position FuDensityNet as a solution for occlusion-
aware object detection in real-world scenarios, war-
ranting further investigations for comprehensive un-
derstanding and broader applications.
5 CONCLUSION
In this study, we introduced an innovative occlusion
handling approach that integrates 2D images and 3D
point cloud data, utilizing advanced preprocessing
and novel network architectures to enhance accuracy
in detecting obscured objects. A key aspect involves
preprocessing input data, incorporating density-based
occlusion assessment through voxelization, provid-
ing insights into scene complexity. The pivotal in-
FuDensityNet: Fusion-Based Density-Enhanced Network for Occlusion Handling
637
Table 4: Object Detection AP Results on KITTI Dataset for Occlusion Analysis.
Network Data Car Pedestrian Cyclist
Easy Moderate Hard Easy Moderate Hard Easy Moderate Hard
YOLO-NAS (Sharma et al., 2023) 2D 52.3 51.2 49.1 50.2 48.3 45.8 49.3 47.4 43.5
YOLO3D (Ali et al., 2018) LIDAR 32.3 29.5 24.2 31.7 27.2 23.5 28.5 21.6 17.0
CompNet (Kortylewski et al., 2020) 2D 40.2 32.6 31.2 36.5 32.3 29.8 28.3 24.1 21.2
MV3D (Chen et al., 2017) 2D+LIDAR 41.3 40.2 38.1 35.2 31.3 29.8 37.3 31.4 30.5
FusionNet-Our 2D+LIDAR 40.5 39.9 36.6 39.3 33.8 30.1 29.6 29.5 27.8
FuDensityNet-Our 2D+LIDAR 52.3 39.9 36.6 50.2 33.8 30.1 49.3 29.5 27.8
novation lies in fusing 2D and 3D data using well-
designed network architectures, achieving superior
detection accuracy, even in challenging occluded sce-
narios. Acknowledging limitations is crucial, as ini-
tial testing used a limited dataset, necessitating fur-
ther experimentation with more extensive datasets for
generalizability. Our occlusion handling approach
demonstrates a significant advancement in object de-
tection, evidenced by quantifiable improvements in
AP across different occlusion levels, yielding substan-
tial increases compared to existing methods. In con-
clusion, our study establishes a robust occlusion han-
dling approach, a noteworthy advancement in object
detection technology, anticipating broader applicabil-
ity and potential contributions to advancing object de-
tection technology. Future work will address identi-
fied limitations, including dataset expansion and con-
tinued refinement of proposed methodologies.
REFERENCES
Ali, W., Abdelkarim, S., Zidan, M., Zahran, M., and El Sal-
lab, A. (2018). Yolo3d: End-to-end real-time 3d ori-
ented object bounding box detection from lidar point
cloud. In Proceedings of the European conference on
computer vision (ECCV) workshops, pages 0–0.
Amel, O. and Stassin, S. (2023). Multimodal approach for
harmonized system code prediction. In Proceedings
of the 31st European Symposium on Artificial Neural
Networks, Computational Intelligence and Machine
Learning, pages 181–186.
Bentley, J. L. (1975). Multidimensional binary search trees
used for associative searching. Communications of the
ACM, 18(9):509–517.
Bharati, P. and Pramanik, A. (2020). Deep learning
techniques—r-cnn to mask r-cnn: a survey. Compu-
tational Intelligence in Pattern Recognition: Proceed-
ings of CIPR 2019, pages 657–668.
Chen, X., Ma, H., Wan, J., Li, B., and Xia, T. (2017). Multi-
view 3d object detection network for autonomous
driving. In Proceedings of the IEEE conference
on Computer Vision and Pattern Recognition, pages
1907–1915.
Chen, X., Zhang, T., Wang, Y., Wang, Y., and Zhao, H.
(2023). Futr3d: A unified sensor fusion framework for
3d detection. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 172–181.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In 2012 IEEE conference on computer vision
and pattern recognition, pages 3354–3361. IEEE.
Gunasekaran, K. P. and Jaiman, N. (2023). Now you see me:
Robust approach to partial occlusions. arXiv preprint
arXiv:2304.11779.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Huang, Z., Li, L., Krizek, G. C., and Sun, L. (2023). Re-
search on traffic sign detection based on improved
yolov8. Journal of Computer and Communications,
11(7):226–232.
Kortylewski, A., Liu, Q., Wang, H., Zhang, Z., and Yuille,
A. (2020). Combining compositional models and deep
networks for robust object classification under occlu-
sion. In Proceedings of the IEEE/CVF winter confer-
ence on applications of computer vision, pages 1333–
1341.
Ku, J., Mozifian, M., Lee, J., Harakeh, A., and Waslander,
S. L. (2018). Joint 3d proposal generation and object
detection from view aggregation. In 2018 IEEE/RSJ
International Conference on Intelligent Robots and
Systems (IROS), pages 1–8. IEEE.
Li, C., Li, L., Jiang, H., Weng, K., Geng, Y., Li, L., Ke, Z.,
Li, Q., Cheng, M., Nie, W., et al. (2022a). Yolov6: A
single-stage object detection framework for industrial
applications. arXiv preprint arXiv:2209.02976.
Li, Y., Qi, C. R., Zhou, Y., Liu, C., and Anguelov, D. (2023).
Modar: Using motion forecasting for 3d object detec-
tion in point cloud sequences. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 9329–9339.
Li, Y., Yu, A. W., Meng, T., Caine, B., Ngiam, J., Peng,
D., Shen, J., Lu, Y., Zhou, D., Le, Q. V., et al.
(2022b). Deepfusion: Lidar-camera deep fusion for
multi-modal 3d object detection. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 17182–17191.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017). Focal loss for dense object detection. In
Proceedings of the IEEE international conference on
computer vision, pages 2980–2988.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In European conference on com-
puter vision, pages 21–37. Springer.
Maturana, D. and Scherer, S. (2015). Voxnet: A 3d con-
volutional neural network for real-time object recog-
nition. In 2015 IEEE/RSJ international conference on
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
638

intelligent robots and systems (IROS), pages 922–928.
IEEE.
Nguyen, A. D., Pham, H. H., Trung, H. T., Nguyen, Q.
V. H., Truong, T. N., and Nguyen, P. L. (2023). High
accurate and explainable multi-pill detection frame-
work with graph neural network-assisted multimodal
data fusion. Plos one, 18(9):e0291865.
Ouardirhi, Z., Mahmoudi, S. A., Zbakh, M., El Ghmary,
M., Benjelloun, M., Abdelali, H. A., and Derrouz, H.
(2022). An efficient real-time moroccan automatic
license plate recognition system based on the yolo
object detector. In International Conference On Big
Data and Internet of Things, pages 290–302. Springer.
Ouyang, W., Wang, X., Zeng, X., Qiu, S., Luo, P., Tian,
Y., Li, H., Yang, S., Wang, Z., Loy, C.-C., et al.
(2015). Deepid-net: Deformable deep convolutional
neural networks for object detection. In Proceedings
of the IEEE conference on computer vision and pat-
tern recognition, pages 2403–2412.
Pandya, S., Srivastava, G., Jhaveri, R., Babu, M. R., Bhat-
tacharya, S., Maddikunta, P. K. R., Mastorakis, S.,
Piran, M. J., and Gadekallu, T. R. (2023). Feder-
ated learning for smart cities: A comprehensive sur-
vey. Sustainable Energy Technologies and Assess-
ments, 55:102987.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017). Point-
net++: Deep hierarchical feature learning on point sets
in a metric space. Advances in neural information pro-
cessing systems, 30.
Radosavovic, I., Kosaraju, R. P., Girshick, R., He, K., and
Doll
´
ar, P. (2020). Designing network design spaces.
In Proceedings of the IEEE/CVF conference on com-
puter vision and pattern recognition, pages 10428–
10436.
Ramachandram, D. and Taylor, G. W. (2017). Deep mul-
timodal learning: A survey on recent advances and
trends. IEEE signal processing magazine, 34(6):96–
108.
RODRIGUES, L. S., Sakiyama, K., Takashi Matsubara, E.,
Marcato Junior, J., and Gonc¸alves, W. N. Multimodal
fusion based on arithmetic operations and attention
mechanisms. Available at SSRN 4292754.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2018). Mobilenetv2: Inverted residu-
als and linear bottlenecks. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 4510–4520.
Sharma, P., Gupta, S., Vyas, S., and Shabaz, M. (2023).
Retracted: Object detection and recognition using
deep learning-based techniques. IET Communica-
tions, 17(13):1589–1599.
Shi, S., Guo, C., Jiang, L., Wang, Z., Shi, J., Wang, X.,
and Li, H. (2020). Pv-rcnn: Point-voxel feature set
abstraction for 3d object detection. In Proceedings
of the IEEE/CVF conference on computer vision and
pattern recognition, pages 10529–10538.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Sozzi, M., Cantalamessa, S., Cogato, A., Kayad, A.,
and Marinello, F. (2022). Automatic bunch detec-
tion in white grape varieties using yolov3, yolov4,
and yolov5 deep learning algorithms. Agronomy,
12(2):319.
Steyaert, S., Pizurica, M., Nagaraj, D., Khandelwal, P.,
Hernandez-Boussard, T., Gentles, A. J., and Gevaert,
O. (2023). Multimodal data fusion for cancer
biomarker discovery with deep learning. Nature Ma-
chine Intelligence, 5(4):351–362.
Wang, C., Ma, C., Zhu, M., and Yang, X. (2021). Pointaug-
menting: Cross-modal augmentation for 3d object de-
tection. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
11794–11803.
Wang, C.-Y., Bochkovskiy, A., and Liao, H.-Y. M. (2023).
Yolov7: Trainable bag-of-freebies sets new state-of-
the-art for real-time object detectors. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 7464–7475.
Xiang, Y., Mottaghi, R., and Savarese, S. (2014). Beyond
pascal: A benchmark for 3d object detection in the
wild. In IEEE winter conference on applications of
computer vision, pages 75–82. IEEE.
Yan, Y., Mao, Y., and Li, B. (2018). Second:
Sparsely embedded convolutional detection. Sensors,
18(10):3337.
Yang, C., Ablavsky, V., Wang, K., Feng, Q., and Betke,
M. (2020). Learning to separate: Detecting heavily-
occluded objects in urban scenes. In European Con-
ference on Computer Vision, pages 530–546. Springer.
Ye, D., Zhou, Z., Chen, W., Xie, Y., Wang, Y., Wang, P., and
Foroosh, H. (2023a). Lidarmultinet: Towards a uni-
fied multi-task network for lidar perception. In Pro-
ceedings of the AAAI Conference on Artificial Intelli-
gence, volume 37, pages 3231–3240.
Ye, H., Zhao, J., Pan, Y., Cherr, W., He, L., and Zhang,
H. (2023b). Robot person following under partial oc-
clusion. In 2023 IEEE International Conference on
Robotics and Automation (ICRA), pages 7591–7597.
IEEE.
Yun, S., Han, D., Oh, S. J., Chun, S., Choe, J., and Yoo,
Y. (2019). Cutmix: Regularization strategy to train
strong classifiers with localizable features. In Pro-
ceedings of the IEEE/CVF international conference
on computer vision, pages 6023–6032.
Zadeh, A., Chen, M., Poria, S., Cambria, E., and Morency,
L.-P. (2017). Tensor fusion network for multimodal
sentiment analysis. arXiv preprint arXiv:1707.07250.
Zhang, J., Wang, J., Xu, D., and Li, Y. (2021). Hcnet: a
point cloud object detection network based on height
and channel attention. Remote Sensing, 13(24):5071.
Zhang, S., Benenson, R., and Schiele, B. (2017). Cityper-
sons: A diverse dataset for pedestrian detection. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 3213–3221.
Zhao, H., Shi, J., Qi, X., Wang, X., and Jia, J. (2017).
Pyramid scene parsing network. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 2881–2890.
Zhu, X., Ma, Y., Wang, T., Xu, Y., Shi, J., and Lin, D.
(2020). Ssn: Shape signature networks for multi-
class object detection from point clouds. In Com-
puter Vision–ECCV 2020: 16th European Confer-
ence, Glasgow, UK, August 23–28, 2020, Proceed-
ings, Part XXV 16, pages 581–597. Springer.
FuDensityNet: Fusion-Based Density-Enhanced Network for Occlusion Handling
639
