
Towards Knowledge-Augmented Agents for Efficient and Interpretable
Learning in Sequential Decision Problems
Reem Alansary and Nourhan Ehab
Department of Computer Science and Engineering, German University in Cairo, Cairo, Egypt
Keywords:
Neuro-Symbolic AI, Reinforcement Learning, Representation Learning.
Abstract:
The advantages of neurosymbolic systems as solvers of sequential decision problems have captured the at-
tention of reseachers in the field of AI. The combination of perception and cognition allows for constructing
learning agents with memory. In this position paper, we argue that the decision-making abilities of such
knowledge-augmented solvers transcend those of black-box function approximators alone as the former can
generalize through inductive reasoning to behave optimally in unknown states and still remain fully or par-
tially interpretable. We present a novel approach leveraging a knowledge base structured as a layered directed
acyclic graph, facilitating reasoned generalization in the absence of complete information.
1 INTRODUCTION
With the onset of the third AI Summer (Kautz, 2020),
Neuro-Symbolic systems have captured the attention
of AI researchers, enthusiasts, and the scientific com-
munity to address problems where “solutions that
work” are no longer sufficient. It is now of great im-
portance to have solutions that are efficient and trans-
parent, at least to a certain degree. Our contention
is that a system integrating both neural and symbolic
components holds added value in achieving this ob-
jective. On the one hand, data-driven systems rarely
require expert interference or detailed and specific al-
gorithms to learn a solution of some task, but in most
cases they need to witness myriads of data. As a re-
sult, a system trained in this way is robust against
noise, but turns out to be costly in terms of compu-
tation time and resources. Furthermore, they tend
to produce solutions of an esoteric nature incapable
of being deciphered simply by scrutiny and analy-
sis. On the other hand, systems built using symbols
and rules have to have an internal store of knowl-
edge, known as a knowledge base (KB); this KB is
the defining factor for the system’s behaviour as in-
dicated by the Knowledge Representation Hypothe-
sis (Brachman and Levesque, 2004). Nevertheless,
knowledge-based programs can not gracefully handle
erroneous input and the inference they employ is by
itself computationally expensive.
Our intent is not to undermine the success of either
neural or symbolic systems. Nonetheless, a single-
type program fails to emulate human cognitive capac-
ities, a quintessential feature of intelligent machines.
Humans learn new things all the time, but they do
not learn without background knowledge most of the
time. They can also utilize language to describe or
even explain their knowledge of the world. Thus,
they use both their perception and cognition abilities.
Therefore, we posit that a true emulation of the hu-
man mind demands a machine that amalgamates the
strengths of both data-driven and symbolic AI as each
type is comparable to a mode of thinking of the hu-
man mind (Evans and Stanovich, 2013).
This position paper specifically addresses prob-
lems inherently demanding a neuro-symbolic sys-
tem, particularly sequential decision problems (Barto
et al., 1989). We center our discussion on the sub-
set of such problems that are either too big or too
complex to have a complete KB. Solutions for these
problems must be learned through repeated observa-
tion and prediction. However, if a learning-only ap-
proach is adopted without utilizing cognition to rea-
son over the learned knowledge, generalization may
be a lethargic process, and if a neural network is used
for speeding up with increasing problem scale, inter-
pretability of the achieved solution would be compro-
mised. Hence, we argue that solvers of such problems
should begin by learning partial solutions that can be
represented symbolically in a layered directed acyclic
graph where similar nodes can be grouped together
and in a language that permits inductive reasoning to
enable fast and interpretable generalization.
1014
Alansary, R. and Ehab, N.
Towards Knowledge-Augmented Agents for Efficient and Interpretable Learning in Sequential Decision Problems.
DOI: 10.5220/0012430900003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 1014-1019
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

2 SIMILARITY REVELATIONS
Before delving into the available approaches for tack-
ling the problem of efficient and interpretable general-
ization in sequential decision problems, we introduce
a simple model of such problems: the Markov Deci-
sion Process (MDP). An MDP M is formally defined
as the 4-tuple M = (S, T, A, R) where:
• S is the state space,
• T is the transition model,
• A is the action space, and
• R is the reward function.
The transition model T usually has a probabilistic
nature and the reward function is always defined with
respect to some goal. In other words, for all states
s ∈ S, where the goal is achieved, the reward is maxi-
mum. Any MDP M exhibits the Markovian Property
that guarantees that the current state of the world is
affected only by the most recent previous state.
A solution for M then would be the optimal global
policy π
∗
found by an abstract embodiment of the
solver as a rational agent which learns by reinforce-
ment. This agent finds the optimal global policy by re-
peatedly observing state-action-reward sequences in
the MDP and making predictions as to which actions
would lead it to its goal.
Early efforts to build a reinforcement learning
(RL) agent capable of learning π
∗
, that were based on
temporal difference methods (Sutton, 1988), resulted
in the development of several analytically transpar-
ent algorithms (Yu et al., 2021). However, not much
later, it was found that emergent algorithms that were
model-free, such as Q-Learning or SARSA, did not
scale well (Kaelbling et al., 1996). This was due to
their operation without a model of the environment.
That is, these algorithms disregard the importance of
similarity of agent behaviour in state-action-reward
sequences and the similarity of state representations.
This early finding comports with our position that
capitalizing on such similarity would aid in the gen-
eralization process of any rational agent.
Subsequent research explored model-based algo-
rithms, such as Dyna and prioritized sweeping (Sutton
et al., 2012), that capitalize on similarity of agent be-
haviour or state representation. In the next section, we
delve into approaches aiming to learn representations
of the underlying problem to facilitate generalization.
3 MODEL REPRESENTATIONS
In order to mitigate the difficulties hindering fast
and interpretable generalization, researchers shifted
their attention from model-free to model-based algo-
rithms. However, not all proposed solutions revolved
around representing the environment model or parts
of it to discover regularities between states. Some ap-
proaches were motivated by abstracting the similar-
ity of agent behaviour across state-action-reward se-
quences.
One method of abstracting granular operations
transformed the underlying problem model from a
regular MDP into a Semi-MDP (SMDP) (Barto and
Mahadevan, 2003), where the agent may remain in
one state for more than a single time step. This char-
acteristic waiting time gives the agent the opportunity
to execute multiple primitive actions. Thus, the no-
tion of macros was introduced. Through the use of
macro operators, the agent behaviour is successfully
abstracted as the invocation of any macro is analogous
to compounding state-action-reward sequences. This
representation of the problem as an SMDP motivates
hierarchical RL, where a common architecture of a
solution is to segment the environment and assign an
agent to each segment, such that these agents report
back to a master agent that then would have “macro”
information of the optimal policy of each segment.
This approach can also be extended to function in
partially observable MDPs (POMDPs) by adding hi-
erarchical memory structures where agents, at each
level corresponding to an abstraction degree, repre-
sent their belief states. In a POMDP, every state can
be partially observable, thus an agent observes a be-
lief state that corresponds to a probability distribution
over the set of possible states that it can be in.
On a similar note, agent behaviour can be ab-
stracted by applying a bisimulation metric to the op-
timal policies in different states to measure their sim-
ilarity without depending on the knowledge of the
reward function (Agarwal et al., 2021). Although
we believe that incorporating reward information is
at the heart of goal-directed generalization (Landa-
juela et al., 2021), this approach has shown promising
results for control problems as it identifies states as
close when their policies are similar. Hence, it can be
argued that since the policy is used to measure simi-
larity, then the reward function is taken into consider-
ation indirectly.
Another relevant endeavor to generalize and en-
able an RL agent to learn the optimal policy faster
adopted a data mining approach (Apeldoorn and
Kern-Isberner, 2017) to discover the best action in any
state quickly (Apeldoorn and Kern-Isberner, 2017).
The goal was to represent the optimal policy as a
structured KB of weighted rules, such that each ab-
stract rule may indicate the best action in a group of
states where the agent perceptions in each state are
Towards Knowledge-Augmented Agents for Efficient and Interpretable Learning in Sequential Decision Problems
1015

similar. The agent starts exploiting the learned knowl-
edge according to the strategic depth measure that is
based on the size of the KB.
The previous approaches experimented with
learning symbolic knowledge to enable the learners
to act fast in large environments. There is another
research direction which assumes that background
knowledge is fully or in part available (Ledentsov,
2023, for instance). While we contend that this is
infeasible for every environment as knowledge may
not always be in abundance, the results support our
position that learning becomes faster and more inter-
pretable when a symbolic component is present.
Recent advances in this direction include works on
control problems, where deep RL is employed to learn
mathematical functions as approximations for each
action in the action space in a sequential manner (Lan-
dajuela et al., 2021); this approach reduces complex-
ity of the environment by building the function ap-
proximators step-by-step and giving a neural network
prior information of properties of certain functions to
inhibit the generation of trivial action represenations,
such as an invertible function and its inverse and ap-
plying one to the other or vice versa. This corresponds
to creating an ordering of actions (a
1
, a
2
, a
3
, .., a
n
) for
some n ∈ N such that the function approximator for
a
i+1
is searched for only when the complexity of the
search space has been reduced by fixing representa-
tions for action a
1
through a
i
for 1 ≤ i ≤ n.
Special attention has been accorded to the impor-
tance of model-aided learning in environments with
sparse rewards, where the nature of the reward func-
tion may render the modelling of the environment
as an MDP inadequate. The use of a partial model
representation in the form of a declarative planning
model provided to an RL agent from humans as ad-
vice was explored to simplify the underlying problem
(Guan et al., 2022). The planning model helped the
agent decompose the problem into sub-problems or
landmarks. Thus, hierarchical RL could be employed
to find the optimal solution for each landmark and
the optimal policy is obtained by stitching together
these individual solutions. On a different note, such
environments could be regarded as completely non-
Markovian and as such a different learning approach
should be used. One example, which conforms with
our standpoint that generalizations should be learned,
learns a deterministic finite automaton (DFA) that
simplifies the problem by providing a Markovian de-
composition of it (Christoffersen et al., 2023). Af-
ter this transformation, the DFA and observations are
used in conjunction to learn the optimal policy by tab-
ular Q-learning.
4 OUR PROPOSED APPROACH
Humans generalize efficiently only when they use
their memory to keep track of past experiences in a
language that allows for inductive reasoning and the
best decision-makers are those with the best general
experience. They are those with the best knowledge
bases. We believe that this idea should be maintained
as the heart of any solution that considers efficiency
and interpretability for any sequential decision prob-
lem. Otherwise, we would be running into the old
problem of having learning agents that are expected
to behave optimally in short time, but on every power-
on they must learn with a clean slate (Kaelbling et al.,
1996).
Learning with a clean slate is not enough for large
or complex environments. In order to behave opti-
mally and in a shorter time in such environments, an
agent must leverage its memory by reasoning with
past experience. We argue that such behaviour is
accomplished through a symbolic representation of
knowledge as the agent’s behaviour would be en-
trenched in this representation.
Means to this end, governed by the underlying
model of the sequential decision problem at hand,
vary depending on the nature of the domain; whether
it is discrete or continuous. Within this line of re-
search, endeavors can be categorized based on the
extent of available knowledge for utilization. Some
approaches assume either partial or complete access
to symbolic knowledge in a defined format, employ-
ing it as a guiding framework for a learning agent.
Conversely, alternative methodologies avoid such as-
sumptions, opting to concurrently acquire the sym-
bolic representation while navigating the path to an
optimal policy.
We stand with the second view and propose a so-
lution with the initial absence of knowledge in fully
observable environments. Necessary knowledge can
then be acquired through symbolic function approx-
imators or by reasoning on some logical represen-
tation. We are currently working on systems that
use tabular Q-learning for learning logical knowledge,
stored in a layered graph-based KB, that can be gen-
eralized through inductive reasoning as it is our belief
that this approach is best suited for preserving inter-
pretability as well as for being efficient.
4.1 KB Structure
Addressing the crux of efficient learning and gener-
alization, we propose a graph-based Knowledge Base
(KB) structured into layers. Each layer corresponds
to the agent’s sensors, forming a hierarchy that aids
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1016
⊥ =⇒ >
r
10
r
20
. . .
r
(m−1)1
r
m1
r
(m−1)2
r
21
. . .
r
22
. . .
r
(m−1)3
r
m2
r
m3
r
11
r
23
. . .
r
(m−1)4
r
(m−1)5
r
24
. . .
r
(m−1)6
r
m4
. . .
. . .
. . .
. . .
. . .
r
1 j
r
2(k−1)
. . .
r
2k
. . .
r
(m−1)(l−1)
r
m(n−1)
r
(m−1)l
r
mn
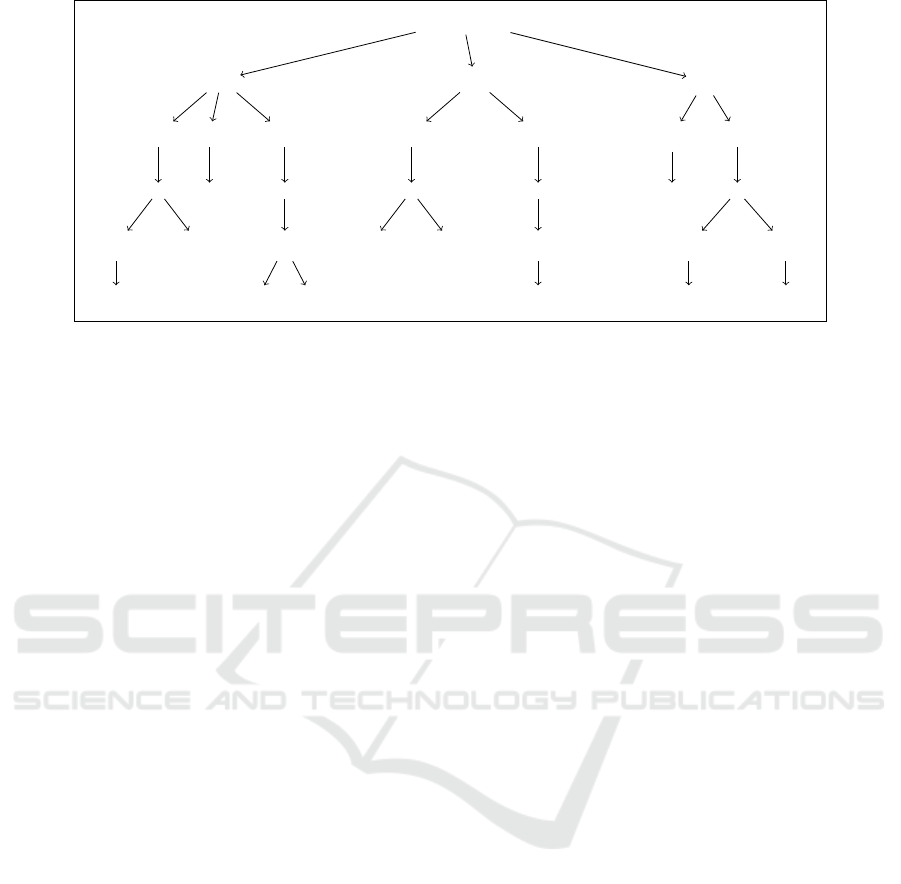
Figure 1: An abstract example of the graph-based KB where each r
ab
is a rule in level a and its index in that level is b.
in efficient navigation and representation of learned
rules. The graph data structure is chosen over the clas-
sical flat KB as it can separate the learned rules such
that similar ones remain closer together. Besides, the
directed links translate the relation between the rules
in two connected nodes.
The zeroth level of the KB is made up of one util-
ity node that holds the structure together but is not
representative of a rule specific to any decision prob-
lem; it will always hold the material conditional
⊥ =⇒ >,
which serves as a formalization of the fact that any
agent situated in an unknown environment without
prior knowledge will believe that it can execute any
action and that all actions are equally preferable with
respect to its goal, embodied by the reward function.
Although any valid sentence would have served the
same purpose, the above sentence was favored as it
conforms to the standard format of the rules and it
intuitively maps to the behaviour of a learning agent
starting out in any environment. Any node, other
than the utility node, holds a rule consisting of a dis-
cretized state from an environment, as the antecedent,
and the corresponding best action as the consequent
of a material conditional. Records of the total num-
ber of application and the number of successes of a
rule are kept alongside the rule in the corresponding
node. Furthermore, on the grounds that each rule is
obtained through an inductive process that generates
a belief that could be revised not absolute knowledge,
we associate with each rule a weight measuring its
credibility. For nodes in the bottom level, this weight
is based on the q-value of the rule, which comes di-
rectly from the learning algorithm and is a measure of
how relevant this rule is for the agent’s goal, and the
successes and tries of this rule. Each rule in any other
level is induced and its weight is computed from the
weights of the rules in the nodes that participated in
its induction.
The levels of the KB are finite and directly cor-
respond to the number of sensors of the agent; if the
agent has m sensors, then the graph has m + 1 lev-
els, where the i
th
level has i sensor values forming the
antecedent of every rule for 0 ≤ i ≤ m. Thus, the bot-
tom level contains the rules that directly map to states
and actions obtained from the learning algorithm. The
rules in every other level, where i 6= m, are created
by an inductive inference process using those in level
i + 1 or the level directly below. A graphic example
is shown in figure 1, where out of all the contents of
a single node only the rule is shown for simplicity.
These rules can be used to interpret the behaviour of
the agent and the outcome of the learning algorithm
as each rule maps either a full or partial state to the
perceived optimal action with respect to some goal;
rules in the bottom level correspond to full states, but
rules in any other level correspond to partial states as
they are induced. This mapping, enforced by the rule
format, helps in clarifying the agent’s belief about the
outcome of executing some action in some state and
why the agent’s beliefs may change with any change
of an observation.
4.2 KB Operations
The KB provides two functionalities; the first is to
store knowledge and the second is to utilize it. In or-
der to accomplish both, the KB is furnished with 4
operations, briefly described below.
Insert. This is a TELL-type operation invoked by an
agent to add knowledge to the KB. The knowledge
can be a new rule or experience for an already
existing rule. If a new rule is to be added, then
it added directly to the last level in a node with
Towards Knowledge-Augmented Agents for Efficient and Interpretable Learning in Sequential Decision Problems
1017
application and successes numbers equal zero.
However, if experience is to be incorporated and
it is not contradictory, only the numbers of appli-
cation and successes are updated. In the case of
contradictory evidence, which may occur if a dif-
ferent best action for the same state is learned, the
old rule and its credibility are updated, and the
numbers of application and successes are reset.
Infer. This is an ASK-type operation to apply an in-
ference method for detecting implicit knowledge
in the KB. This operation adds the implicit knowl-
edge to the graph in the form of nodes as described
above in level i if they were inferred from rules in
nodes in level i + 1, where 0 ≤ i ≤ m and m is the
number of sensors of the agent. The addition of a
new node n
new
is accompanied by the addition of
directed edges from this node to each of the nodes
from which its rule was inferred. An edge is also
added from the node n
old
that was already con-
nected to these nodes, used in the inference pro-
cess, to n
new
, whereas the old edges are removed.
Thus, the implicit knowledge becomes explicit.
Search. This is an ASK-type operation for knowl-
edge present explicitly in the KB. The pattern to
be matched is the discretized state of the envi-
ronment, which is always a superset of the an-
tecedent of each rule. Searching the graph hap-
pens in a top-down manner, starting from the util-
ity node and moving down level by level. If sev-
eral matches are found in a single level, the tie
is broken by comparing the credibility measures
or the weights of each rule and only the subgraph
connected to the rule with the highest credibility
is further searched.
Prune. This is a utility operation to prevent clutter-
ing the KB with unnecessary knowledge. A rule
becomes redundant when there exists an inferred
rule that subsumes it. Therefore, the node that
contains the redundant rule should be removed.
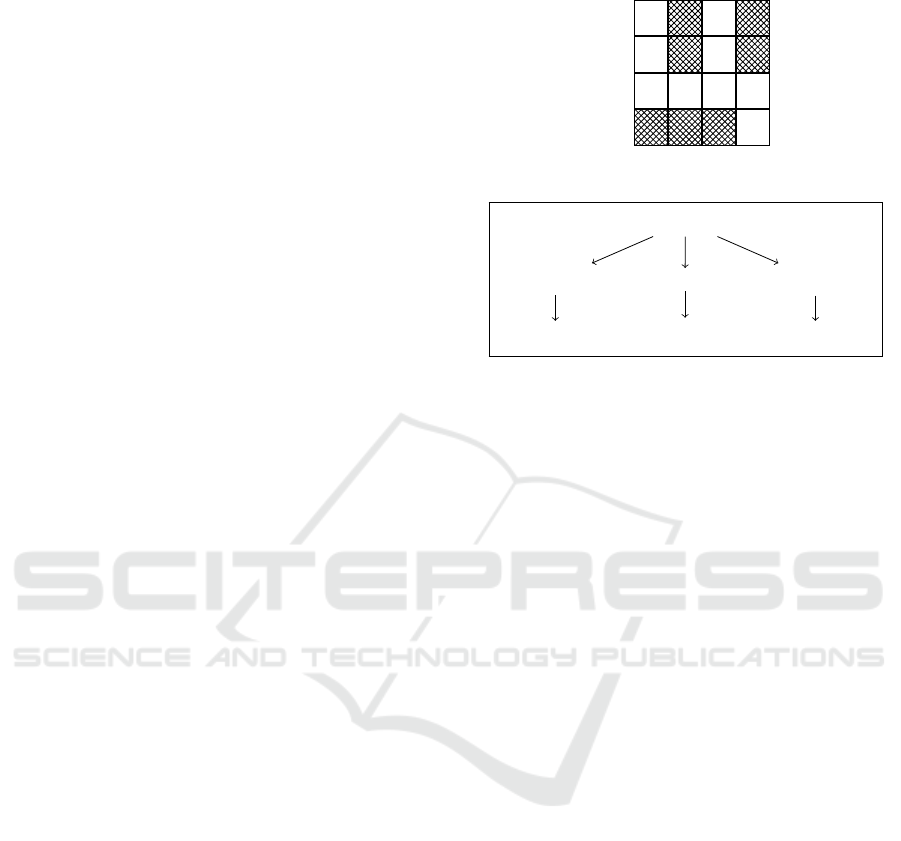
Figure 2 is an example that gives a concrete illus-
tration of the expected result of applying these oper-
ations on the learned policy by an agent in a 4x4 en-
vironment that is trying to reach the cell marked with
an “X” while avoiding obstacles, where again for sim-
plicity only the material implication in each node is
shown. The agent in this environment has two sen-
sors; one for the horizontal axis and the other for the
vertical axis. The arrows representing the consequent
of every rule give the direction the agent should fol-
low when in the state represented by the antecedent of
the same rule. Rules in the bottom level, which rep-
resent full states, are not pruned when they cannot be
subsumed by other rules in a higher level.
e f g h
a ↓ ↓
b ↓ ↓
c → → → ↓
d X
(a)
⊥ =⇒ >
e =⇒ ↓
c ∧ e =⇒ →
c =⇒ →
c ∧ h =⇒ ↓
g =⇒ ↓
c ∧ g =⇒ →
(b)
Figure 2: An example of a 2D environment (2a) and its cor-
responding KB (2b).
Usually the most expensive operations are the
ones concerned with utilizing knowledge and these
correspond to the ASK-type operations: infer and
search. By representing the knowledge in a layered
graph that is also directed and acyclic, we can greatly
improve the complexity of search, because intuitively
once the search goes from a level to the one below
it, many nodes would be disqualified without inspec-
tion of their contents. However, the structure does
not improve the complexity of the inference proce-
dure that much by itself; the graph will be built from
the bottom layer upwards using the experience of the
agent directly and at any given time when the infer-
ence procedure should be run, all nodes in a certain
level will be considered. Therefore, it is our inten-
tion to invoke the infer operation at regular intervals
separated by several learning episodes to prevent the
inference procedure from consuming resources when
the observed knowledge has not changed by much.
After the graph has been partially built, it can be con-
sulted by the agent to speed up the learning of the
optimal policy.
5 CONCLUSIONS
Solutions for sequential decision problems that scale
well and remain transparent to a degree must incor-
porate both components of a neurosymbolic system.
The data-driven component enables learning through
perception and the symbolic component endows the
system with cognitive power. We have argued that the
presence of knowledge in a KB allows the solver of a
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1018

sequential decision problem to reason in order to gen-
eralize faster and in a more interpretable manner.
In consequence, we proposed a solution for prob-
lems that are fully observable in the form of such a
system of two components. The reasoning compo-
nent will make use of a KB organized as a layered
directed acyclic graph and after a sufficient period of
learning and generalization the learner will turn to the
KB to expedite the process of learning the optimal
policy. This is analogous to capitalizing on memory
of past experience, that forms the cognitive abilities of
the solver, in the face of the unknown, which is much
better than facing the unknown with high hopes.
We are currently investigating extensions of the
proposed neuro-symbolic framework to partially ob-
servable environments and the integration of addi-
tional cognitive elements in the KB. Furthermore, we
are exploring enhancing the efficiency of the inferen-
tial procedures in the proposed KB structure. Ad-
ditionally, we plan to conduct empirical validations
across diverse problem domains to provide insights
into the broader applicability and robustness of the
proposed approach, paving the way for advancements
in neuro-symbolic systems for artificial intelligence
applications.
REFERENCES
Agarwal, R., Machado, M. C., Castro, P. S., and Bellemare,
M. G. (2021). Contrastive behavioral similarity em-
beddings for generalization in reinforcement learning.
Apeldoorn, D. and Kern-Isberner, G. (2017). An agent-
based learning approach for finding and exploiting
heuristics in unknown environments. In International
Symposium on Commonsense Reasoning.
Apeldoorn, D. and Kern-Isberner, G. (2017). Towards an
understanding of what is learned: Extracting multi-
abstraction-level knowledge from learning agents. In
Rus, V. and Markov, Z., editors, Proceedings of the
Thirtieth International Florida Artificial Intelligence
Research Society Conference, FLAIRS 2017, Marco
Island, Florida, USA, May 22-24, 2017, pages 764–
767. AAAI Press.
Barto, A. G. and Mahadevan, S. (2003). Recent advances
in hierarchical reinforcement learning. Discrete Event
Dynamic Systems, 13:41–77.
Barto, A. G., Sutton, R. S., and Watkins, C. (1989). Sequen-
tial decision problems and neural networks. Advances
in neural information processing systems, 2.
Brachman, R. and Levesque, H. (2004). Knowledge Rep-
resentation and Reasoning. The Morgan Kaufmann
Series in Artificial Intelligence. Morgan Kaufmann,
Amsterdam.
Christoffersen, P. J. K., Li, A. C., Icarte, R. T., and McIl-
raith, S. A. (2023). Learning symbolic representations
for reinforcement learning of non-markovian behav-
ior.
Evans, J. S. B. T. and Stanovich, K. E. (2013). Dual-process
theories of higher cognition: Advancing the debate.
Perspectives on Psychological Science, 8(3):223–241.
PMID: 26172965.
Guan, L., Sreedharan, S., and Kambhampati, S. (2022).
Leveraging approximate symbolic models for rein-
forcement learning via skill diversity.
Kaelbling, L. P., Littman, M. L., and Moore, A. W.
(1996). Reinforcement learning: A survey. CoRR,
cs.AI/9605103.
Kautz, H. (2020). Rochester hci. https://roc-hci.com/
announcements/the-third-ai-summer/. Accessed on
January 6th, 2024.
Landajuela, M., Petersen, B. K., Kim, S., Santiago, C. P.,
Glatt, R., Mundhenk, N., Pettit, J. F., and Faissol, D.
(2021). Discovering symbolic policies with deep re-
inforcement learning. In Meila, M. and Zhang, T.,
editors, Proceedings of the 38th International Con-
ference on Machine Learning, volume 139 of Pro-
ceedings of Machine Learning Research, pages 5979–
5989. PMLR.
Ledentsov, A. (2023). Knowledge base reuse with frame
representation in artificial intelligence applications.
IAIC Transactions on Sustainable Digital Innovation
(ITSDI), 4(2):146–154.
Sutton, R. S. (1988). Learning to predict by the methods of
temporal differences. Mach. Learn., 3(1):9–44.
Sutton, R. S., Szepesv
´
ari, C., Geramifard, A., and Bowling,
M. P. (2012). Dyna-style planning with linear func-
tion approximation and prioritized sweeping. arXiv
preprint arXiv:1206.3285.
Yu, D., Yang, B., Liu, D., and Wang, H. (2021). A survey
on neural-symbolic systems. CoRR, abs/2111.08164.
Towards Knowledge-Augmented Agents for Efficient and Interpretable Learning in Sequential Decision Problems
1019
