
Learning Occlusions in Robotic Systems: How to Prevent Robots from
Hiding Themselves
Jakob Nazarenus
1 a
, Simon Reichhuber
2 b
, Manuel Amersdorfer
3 c
, Lukas Elsner
4 d
,
Reinhard Koch
1 e
, Sven Tomforde
2 f
and Hossam Abbas
4 g
1
Multimedia Information Processing Group, Kiel University, Hermann-Rodewald-Str. 3, 24118 Kiel, Germany
2
Intelligent Systems, Kiel University, Germany, Hermann-Rodewald-Str. 3, 24118 Kiel, Germany
3
Digital Process Engineering Group, Karlsruhe Institute of Technology, Hertzstr. 16, 76187 Karlsruhe, Germany
4
Chair of Automation and Control, Kiel University, Kaiserstr. 2, 24143 Kiel, Germany
Keywords:
Vision and Perception, Robot and Multi-Robot Systems, Simulation, Neural Networks, Classification,
Autonomous Systems.
Abstract:
In many applications, robotic systems are monitored via camera systems. This helps with monitoring auto-
mated production processes, anomaly detection, and the refinement of the estimated robot’s pose via optical
tracking systems. While providing high precision and flexibility, the main limitation of such systems is their
line-of-sight constraint. In this paper, we propose a lightweight solution for automatically learning this oc-
cluded space to provide continuously observable robot trajectories. This is achieved by an initial autonomous
calibration procedure and subsequent training of a simple neural network. During operation, this network pro-
vides a prediction of the visibility status with a balanced accuracy of 90% as well as a gradient that leads the
robot to a more well-observed area. The prediction and gradient computations run with sub-ms latency and
allow for modular integration into existing dynamic trajectory-planning algorithms to ensure high visibility of
the desired target.
1 INTRODUCTION
With increasing computing capability, it is possi-
ble to make robotic systems more and more intelli-
gent. This includes improved perception of the en-
vironment and the robotic state so that an appropri-
ate action can be calculated based on this. Exam-
ples such as Boston Dynamics
1
show that robots can
solve path-finding problems even in unfamiliar terrain
in a similar way to animals and can hardly be dis-
tinguished from real animals in their movement se-
quences (Guizzo, 2019). The issue of localization of
robotic systems, especially multi-joint robotic arms,
a
https://orcid.org/0000-0002-6800-2462
b
https://orcid.org/0000-0001-8951-8962
c
https://orcid.org/0000-0002-6416-3453
d
https://orcid.org/0009-0001-8097-2373
e
https://orcid.org/0000-0003-4398-1569
f
https://orcid.org/0000-0002-5825-8915
g
https://orcid.org/0000-0002-5264-5906
1
https://bostondynamics.com/ (accessed January 29,
2024)
is challenging for robotics and sensor technology.
Various approaches directly place sensors on board to
detect the near proximity around the moving manip-
ulator and use known structures of the environment
for localization (Fan et al., 2021). Because of the
speed that can be achieved at the end of the arm, sen-
sors must provide high frame rates by simultaneously
lowering the resolution for real-time processing. In
contrast to the on-board approach, external, stationary
cameras exploit well-known reference positions en-
abling highly accurate positioning of moving objects
equipped with optical reference markers (Liu et al.,
2020). Besides the local restriction within the range
of the camera system, there is another crucial draw-
back in such systems, namely the line-of-sight occlu-
sions. With the term line-of-sight occlusion or sim-
ply occlusion we describe points within the viewing
cone of a camera where the direct line of sight to the
camera is interrupted by an obstacle, which means the
obstacle itself also counts as part of the occlusion (cf.
Figure 1). In the simple case, we have the exact posi-
tion of the robot and the environment, which allows us
482
Nazarenus, J., Reichhuber, S., Amersdorfer, M., Elsner, L., Koch, R., Tomforde, S. and Abbas, H.
Learning Occlusions in Robotic Systems: How to Prevent Robots from Hiding Themselves.
DOI: 10.5220/0012431000003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 2, pages 482-492
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
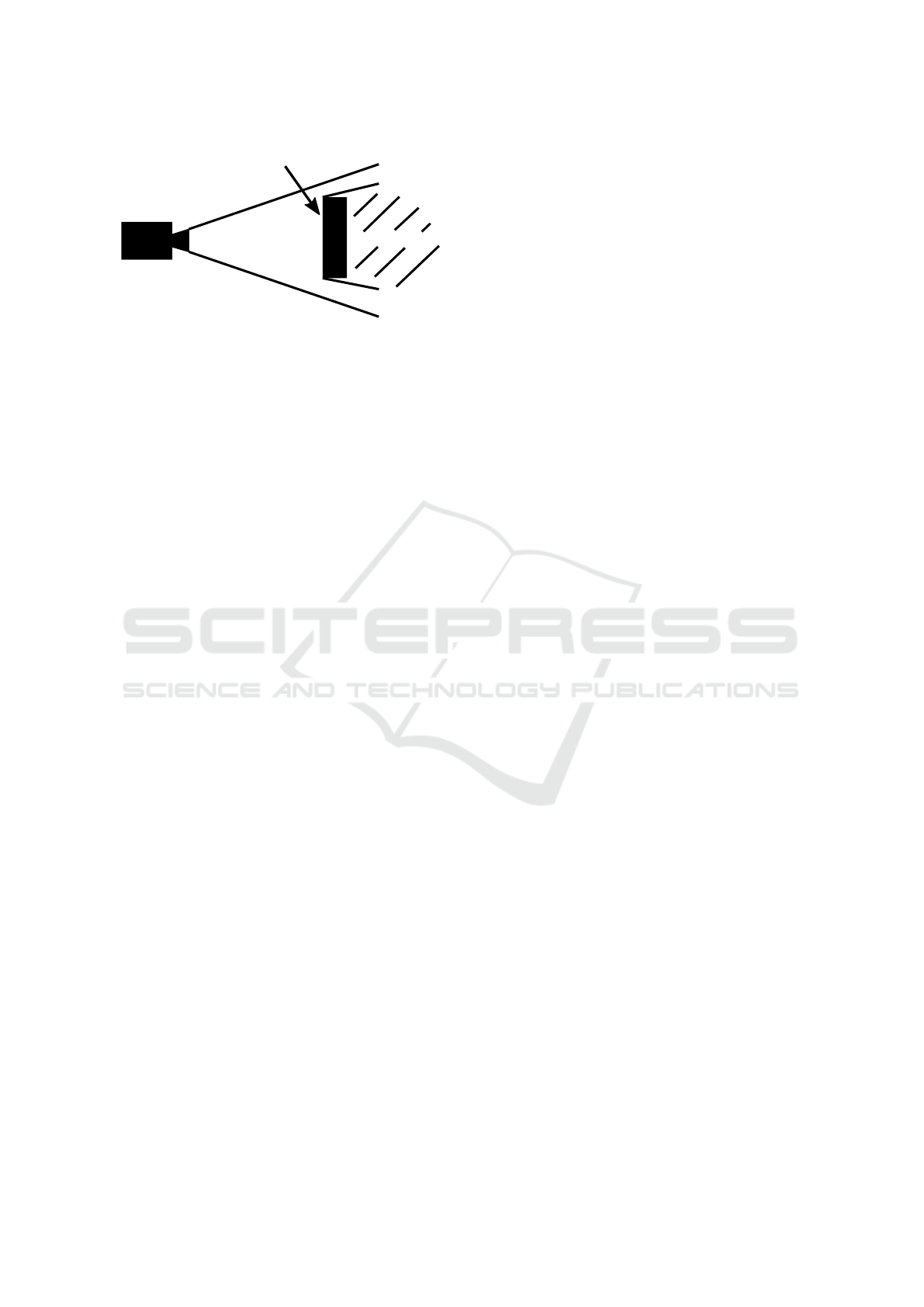
Occlusion
Visibility
Obstacle
Camera
Figure 1: Terminology line-of-sight occlusion.
to calculate the occlusion geometrically. However, it
is possible that the surroundings are unknown or that
the robot obscures itself. Especially in applications
where robotic arm movements are tracked by optical
markers, there is not only an interruption of the line-
of-sight when an external object interferes but also
self-occlusions occur at certain joint configurations.
When the reference point on the robot is occluded,
the pose estimation falls back to the imprecise for-
ward kinematics of the robot causing severe accuracy
issues.
To anticipate and prevent occluded states, we sug-
gest to construct a binary map of occluded robot states
given by a learned approximation, which can be used
for the trajectory calculation. The latter requires train-
ing data that represents the robot state space and its
occlusions fully sampling the possible robot states.
For this purpose, we provide a sampling routine that
can be used to provide data to model the occlusions.
At the end, we discuss the possibility of using the
occlusion model to refine path planning by mini-
mizing the duration of occluded optical references.
For demonstration, we provide a showcase where a
robotic arm holds its end position statically while si-
multaneously moving the rest of the arm to reduce the
occlusions.
The remainder of the paper is structured as fol-
lows: The subsequent Section 2 lists the current state
of the literature about occlusions and robotic arm lo-
calization. Section 3 is divided into three parts: First,
we introduce the problem of learning occlusions as a
binary classification problem and discuss the method-
ology of how to generate trajectories for the training,
second, we describe simulation methods and the real-
world experimental setup, and third, we introduce the
deep learning model for classification. Afterward, in
Section 4, we present all results visually and discuss
them in Section 5. Finally, in Section 6, we conclude
the work and point out some further ideas for future
work.
2 RELATED WORK
The issue of detecting occlusions of important areas
that occur when recording robotic systems with static
camera systems is highly task-dependent. It is often
more appropriate to use a moving camera (Silva and
Santos-Victor, 2001) and to analyze the occlusion us-
ing different perspectives. An explicit detection of
occlusion in a stream-based fashion based on optical
flows has already been shown (Ayvaci et al., 2012).
Here, the obstacle or the camera is moving, which
simplifies the detection of obstacles, since the line-of-
sight between both is temporally given. However, this
method is not applicable to static obstacles. Besides
explicit detection of occlusions, there are two implicit
methods of how to cope with them. First, the addi-
tion of stationary-placed sensors allows looking be-
hind the occlusion. Instead of learning the spatial dis-
tribution of blind spots, some approaches try to reveal
blind spots by merging other more pervasive sensors
with the occluded sensor. A common way is the us-
age of Radio-Frequency sensors, which enable local-
ization with centimeter-scale precision (Boroushaki
et al., 2021). A radio-frequency perception is able
to penetrate non-conducting materials enabling the
tracking of an external Radio-Frequency Identifica-
tion (RFID) reference.
Second, onboard sensors can measure the near
proximity of all moving parts of the robot which turns
the environment into the state of reference and obvi-
ously eliminates the line-of-sight from the reference
(environment) to the robot. When certain known ob-
jects in the environment are detected, a relative lo-
calization is allowed. Knowing only the type and
shape of the object, the robot is able to interact in-
place with the object. Otherwise, if only the distance
to collision is measured only collision avoidance is
possible. Directly tracking the object of observation
and its near proximity by onboard sensors is another
way to prevent occlusions and collisions. For ex-
ample, the tracking of human arm motions using an
Inertial Measurement Unit (IMU) and potentiometer
has been proposed (Shintemirov et al., 2020). As a
ground truth to evaluate the localization accuracy of
a capsule equipped with IMU and a camera system
for endoscopy, Vedaei and Wahid placed the capsule
on a robotic arm and tested movements that naturally
occur gastrointestinally (Vedaei and Wahid, 2021).
Another onboard sensor approach is proximity
sensing (Gandhi and Cervera, 2003), which has been
shown in (Fan et al., 2021) using surface waves. Be-
sides this external sensors are used to track the robotic
system or parts that it interacts with, e.g. part local-
ization in grasping applications (Zheng et al., 2018).
Learning Occlusions in Robotic Systems: How to Prevent Robots from Hiding Themselves
483

To lower the complexity of occlusions, for some
tasks, it is appropriate to model them in only two di-
mensions. For example, given the task of mechan-
ical search, where a manipulator has to find objects
that are occluded by other ones, the occlusions can
be visualized by a 2-dimensional heat map (Daniel-
czuk et al., 2020). In the following, we use the term
occlusion as an abbreviation for interruptions in the
line-of-sight of a camera to the optical reference point
at the robot end effector. The occlusions are there-
fore camera-specific. Enriching the joint space of the
robot with the binary information about the line-of-
sight of a camera allows the planning of trajectories
that minimize the duration of line-of-sight interrup-
tion between the camera and the end effectors.
3 METHODS
The visibility of a point at an n-Degrees of Freedom
(DoF) robot can be modeled by a function f : R
d
→
{0,1} that takes the joint angles of the robot as an in-
put and has a binary output with 1 representing the
visible, and 0 representing the hidden state. The par-
tial visibility of a non-point-like extended object can
be expressed by loosening the function definition to
allow mapping to values in the interval [0, 1]. This
function is highly complex as it depends on the pose
of the camera, the geometry of the robotic system and
its surroundings, as well as its kinematics. Our ap-
proach is to learn this function in a supervised manner
by automatically sampling the domain of the function
and observing the corresponding output. We then use
these samples to employ efficient data-driven meth-
ods to find an estimate for f . To evaluate the capa-
bilities of the employed methods, we used the Bal-
anced Accuracy (bAcc), e. g. found in (Brodersen
et al., 2010). For a set of matched inputs, it is given as
the arithmetic mean of Sensitivity (SEN) and Speci-
ficity (SPEC)
bACC =
1
2
(SEN + SPC) =
1
2
T P
P
+
T N
N
. (1)
Here, TP (TN) is the number of correctly posi-
tively (negatively) classified samples, while P and N
are the number of positive and negative samples. The
balanced accuracy is used here because the dataset
is highly imbalanced in favor of the visible samples.
Similarly to the F1 score (Rijsbergen, 1979), the bAcc
is used in such situations to create a more balanced
measure for the problem. We chose the balanced ac-
curacy as it is easily interpretable and in comparison
to the F1 score does not put more emphasis on the
positive class.
3.1 Trajectory Generation
For the supervised training of our occlusion predic-
tion model, we need to obtain a set of points in the
state space of the robot with their corresponding oc-
clusion status. This training set needs to be large
enough to allow learning-based models to generalize
their knowledge for independently sampled test data.
As a simple strategy, a set of points is uniformly sam-
pled from the state space Q ⊆ R
n
for a robot with n
joints. While this approach might work well with sim-
ulated robots, it does not provide a traversable path
for real robots due to violating the velocity and ac-
celeration constraints. Therefore, an automatic gen-
eration of training trajectories is required. In this
section, we describe a method to generate a continu-
ous path closely resembling the uniform sampling ap-
proach under the given kinematic constraints. Fourier
series are commonly used to design excitation trajec-
tories for parameter identification in robotics (Swev-
ers et al., 1997b; Swevers et al., 1997a; Park, 2006;
St
¨
urz et al., 2017). We utilize the concept in the form
of smooth random functions (Filip et al., 2019). Here,
the trajectory of each joint i ∈ {1, ..., n} is defined as
q
i
(t) =
m
∑
k=0
a
i,k
cos
2πkt
T
+ b
i,k
sin
2πkt
T
(2)
with b
i,0
= 0, where a
i,k
and b
i,k
are the Fourier coef-
ficients, m is the number of modes, and T denotes the
trajectory period. We normalize the generated func-
tion values to unit variance. In the following, we con-
sider the coefficients a
i,k
and b
i,k
to be sampled from
N (0,1/(2m + 1). An alternative method of optimiz-
ing these coefficients is shown in Appendix A. The
corresponding trajectory velocity ˙q
i
(t) and accelera-
tions ¨q
i
(t) are obtained directly from the Fourier se-
ries’ time derivatives. The trajectories have to satisfy
the kinematic and dynamic constraints of the robotic
manipulator. Let (q
i,min
,q
i,max
) be the lower and up-
per bound for the angle of robot joint i. Its angu-
lar velocity and acceleration limits are denoted as
˙q
i,max
and ¨q
i,max
respectively. This leads to the state
space definition Q := {q ∈ R
n
|q
i,min
≤ q
i
≤ q
i,max
, i ∈
{1, ..., n}}.
An exemplary path for a single joint with m = 10
and T = 2 is shown in Figure 2. While for any t, its
function value is randomly distributed according to
N (0,1) under the random choice of the coefficients
a
k
and b
k
(Filip et al., 2019), for a single path the dis-
tribution deviates from N (0,1) due to the individual
function values not being independent. This can be
seen in Figure 2, where the trajectory for m = 10 and
T = 2 is relatively smooth.
With increasing m, the random function becomes
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
484
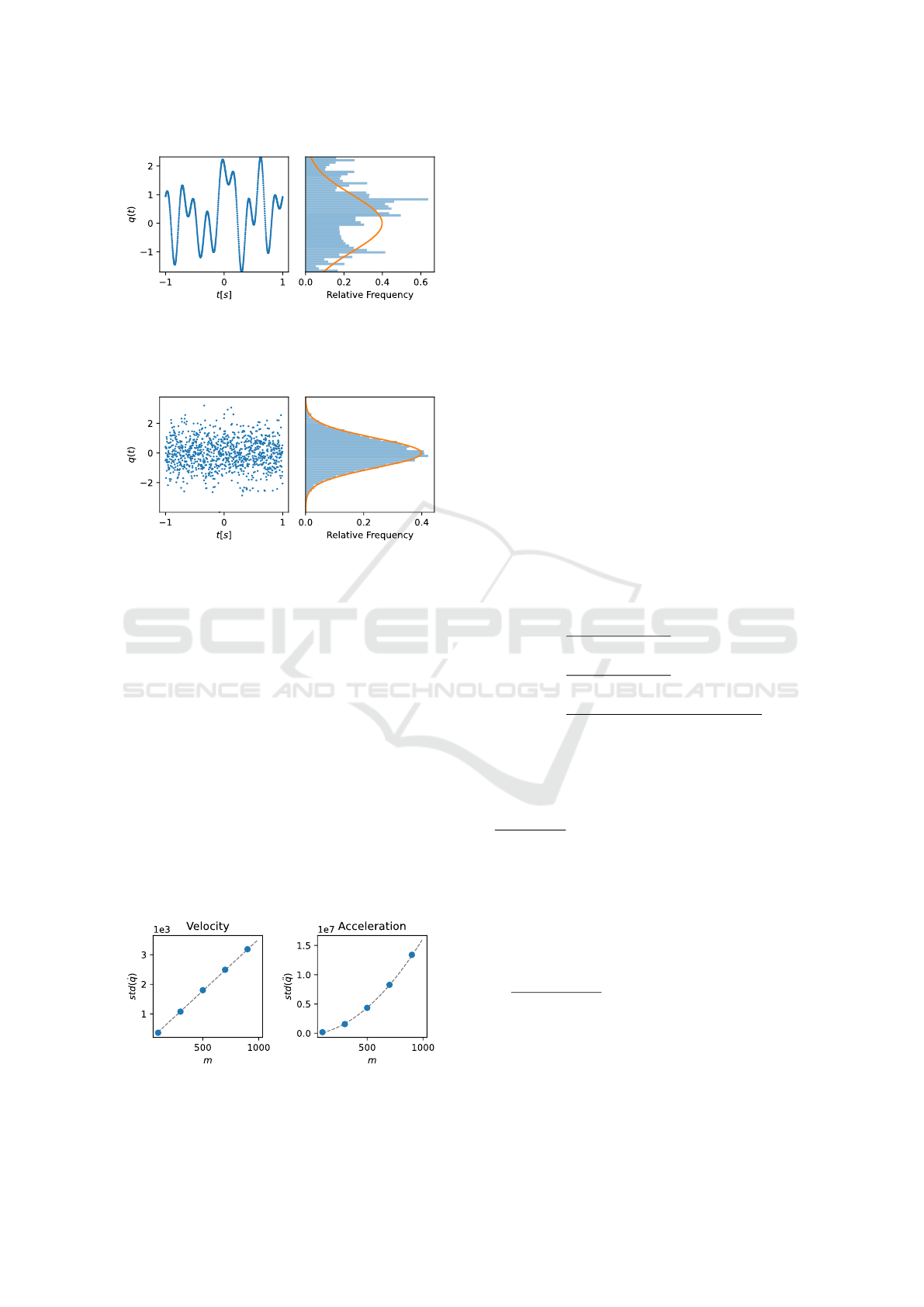
Figure 2: Smooth random path (left) with its spatial distri-
bution (right) for a mode count of m = 10. The orange line
shows the distribution for the limit of infinite modes or infi-
nite paths.
Figure 3: ”Smooth” random path (left) with its spatial dis-
tribution (right) for a mode count of m = 10
4
. The spatial
distribution approaches its limit of a Gaussian distribution.
less smooth and oscillates more often. This reduces
the dependency of successive function values and thus
the deviation from N (0,1). This behavior can be seen
in Figure 3 for m = 10
4
and T = 2.
While this randomness is desirable for the efficient
sampling of the joint space, there are limits given by
the maximum angular speed and acceleration of the
robot. When observing the first and second deriva-
tives, we see them increasing as shown in Figure
4. This prevents the arbitrary increase of the mode
count m, as it would inevitably cause violations of the
robot’s kinematic constraints. In our case, we want to
generate a path that maximizes the variability under
the given constraints for the function values and its
first two derivatives. For this purpose, we propose the
following approach shown in Algorithm 1. For each
Figure 4: Increasing mode counts leads to higher velocities
and accelerations. The dashed line shows a linear fit for the
velocity and a quadratic fit for the acceleration.
joint, we initially find the highest mode count m that
causes the ˙q and ¨q constraints to not be violated most
of the time. To achieve this, we choose a threshold
of 95% (2σ) of the data to be below the given lim-
its. Increasing this threshold causes fewer violations,
but at the same time reduces the reached mode count
m and thus the variability of the generated data. For
the generated trajectories, we enforce the ˙q and ¨q con-
straints by locally slowing down the time via the func-
tion localTimeScaling(). Then, any violations of
the angular constraints are removed by replacing the
violating parts of the trajectory with quadratic poly-
nomials via the function quadraticClipping(). As
both functions alter the overall duration of our tra-
jectory, we enclose this process with a search for the
optimal input duration and terminate once the search
interval falls below a predefined threshold ∆T . This
threshold causes the resulting trajectories for all joints
to slightly differ in their duration, which necessitates
the artificial slowing of all but the longest generated
trajectory via the method alignToSlowest().
3.1.1 Local Time Scaling
With discretized time, the first and second derivatives
are computed as
˙q
i
(t) =
q
i
(t + ∆t) − q
i
(t)
∆t
, (3)
¨q
i
(t) =
˙q
i
(t + ∆t) − ˙q
i
(t)
∆t
=
q
i
(t + 2∆t) − 2q
i
(t + ∆t) + q
i
(t)
∆t
2
.
Given a maximum angular velocity ˙q
i,max
and ac-
celeration ¨q
i,max
, if a velocity or acceleration limit
is exceeded, we can enforce it by scaling the time
locally. This is achieved by multiplying the time
with a factor ˙q
i
(t)/ ˙q
i,max
for velocity constraints and
p
¨q
i
(t)/ ¨q
i,max
for acceleration constraints. To avoid
unnecessary scaling of the whole path, we confine
this scaling locally by only considering regions where
the constraint is violated. Given such a region with
a duration of t
>
, center t
c
, a maximum value of
˙q
i
(t
max
) or ¨q
i
(t
max
) respectively, the time scaling is
given by a Gaussian with mean t
c
and standard devia-
tion t
>
. This Gaussian is rescaled to have a minimum
value of 1 and a maximum value of ˙q
i
(t
max
)/ ˙q
i,max
or
p
¨q
i
(t
max
)/ ¨q
i,max
respectively. This reduces the ac-
celeration and velocity locally to stay within the given
bounds. The overall time scaling factor is then given
by the maximum of all Gaussians for a given time
step. Figure 5 shows an example of the time scaling
for velocity and acceleration constraints.
Learning Occlusions in Robotic Systems: How to Prevent Robots from Hiding Themselves
485

Q
all
,T
all
← [ ],[ ];
for i ∈ [1, n] do
initialize (T
min
,T
max
);
while T
max
− T
min
> ∆T do
T
mean
← (T
max
+ T
min
)/2;
initialize (m
min
,m
max
);
while m
max
− m
min
> 1 do
m
mean
← ⌊(m
max
+ m
min
)/2⌋;
Q ← smRanFun(T
mean
,m
mean
);
˙
Q,
¨
Q ← derivatives(Q);
if 2 ∗ std(
˙
Q) < ˙q
i,max
& 2 ∗ std(
¨
Q) <
¨q
i,max
then
T
min
← T
mean
;
else
T
max
← T
mean
;
end
end
ˆ
Q,
ˆ
T ← localTimeScaling(Q, T
mean
,
˙q
i,max
, ¨q
i,max
);
˜
Q,
˜
T ← quadraticClipping(
ˆ
Q,
ˆ
T , q
i,min
,
q
i,max
, ¨q
i,max
);
if
˜
T < T then
T
min
← T
mean
;
else
T
max
← T
mean
;
end
end
Q
all
.append(
˜
Q);
T
all
.append(
˜
T );
Q
all
,T
all
← alignToSlowest(Q
all
,T
all
);
return Q
all
,T
all
;
end
Algorithm 1: Automatic sampling trajectory genera-
tion based on smooth random functions. The abbre-
viated method smRanFun() describes the generation of
a smooth random function that is normalized according
to the given angular constraints.
3.1.2 Quadratic Clipping
To enforce the position constraints, we replace the
parts exceeding the angular constraint q
i,max
by a
quadratic function. The quadratic coefficient is given
by the acceleration constraint ¨q
i,max
. However, not
only the exceeding points need to be replaced but also
points with an angular velocity so high that it is guar-
anteed that the angular constraint will be exceeded
due to the acceleration constraint. To determine these
points, for each time step t we compute the neces-
sary angular acceleration ¨q
i,stop
(t) > 0 to stop right at
q
i,max
. We denote the corresponding time as t
max
. In
the following considerations,
ˆ
t > t denotes a time step
along the path of maximal deceleration. We compute
the required acceleration value as
Figure 5: Local time scaling enforces the constraints on the
first and second derivatives of the signal. For better visibil-
ity, the time axis is kept the same for all plots. The clipped
gray line shows the original signal while the blue line shows
the modified signal. The lower figure shows the ratio by
which the time is locally delayed in order to constrain the
derivatives.
q
i
(
ˆ
t) = q
i
(t) + ˙q
i
(t)
ˆ
t −
1
2
¨q
i,stop
(t)
ˆ
t
2
(4)
˙q
i
(t
max
) = ˙q
i
(t) − ¨q
i,stop
(t)t
max
= 0
=⇒ t
max
=
˙q
i
(t)
¨q
i,stop
(t)
q
i
(t
max
) = q
i,max
= q
i
(t) +
˙q
i
(t)
2
¨q
i,stop
(t)
−
˙q
i
(t)
2
2 ¨q
i,stop
(t)
=⇒ ¨q
i,stop
(t) =
˙q
i
(t)
2
2(q
i,max
− q
i
(t))
.
If ¨q
i,stop
(t) > ¨q
i,max
holds, we know that the po-
sition constraint will be exceeded even if maximum
deceleration is used to reduce the velocity. Thus, for
each of these regions, we find the last valid time step
t
j
before this region and the first valid time step t
k
af-
ter this region. We then compute a quadratic function
that starts at t
j
with initial velocity ˙q
i
(t
j
) and constant
acceleration ¨q
i,stop
(t
j
) and ends at t
max
with a velocity
of 0. Symmetrically, we compute a second quadratic
function that starts at t
k
with initial velocity ˙q
i
(t
k
) and
constant acceleration ¨q
i,stop
(t
k
) and continues back-
ward in time until it reaches q
i,max
with a velocity of
0. Both functions meet at q
i,max
. For enforcing min-
imum values, this method is applied to the inverted
input signal. Figure 6 demonstrates this method.
As shown in Figure 6, the early deceleration
causes a gap between the two quadratic functions.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
486
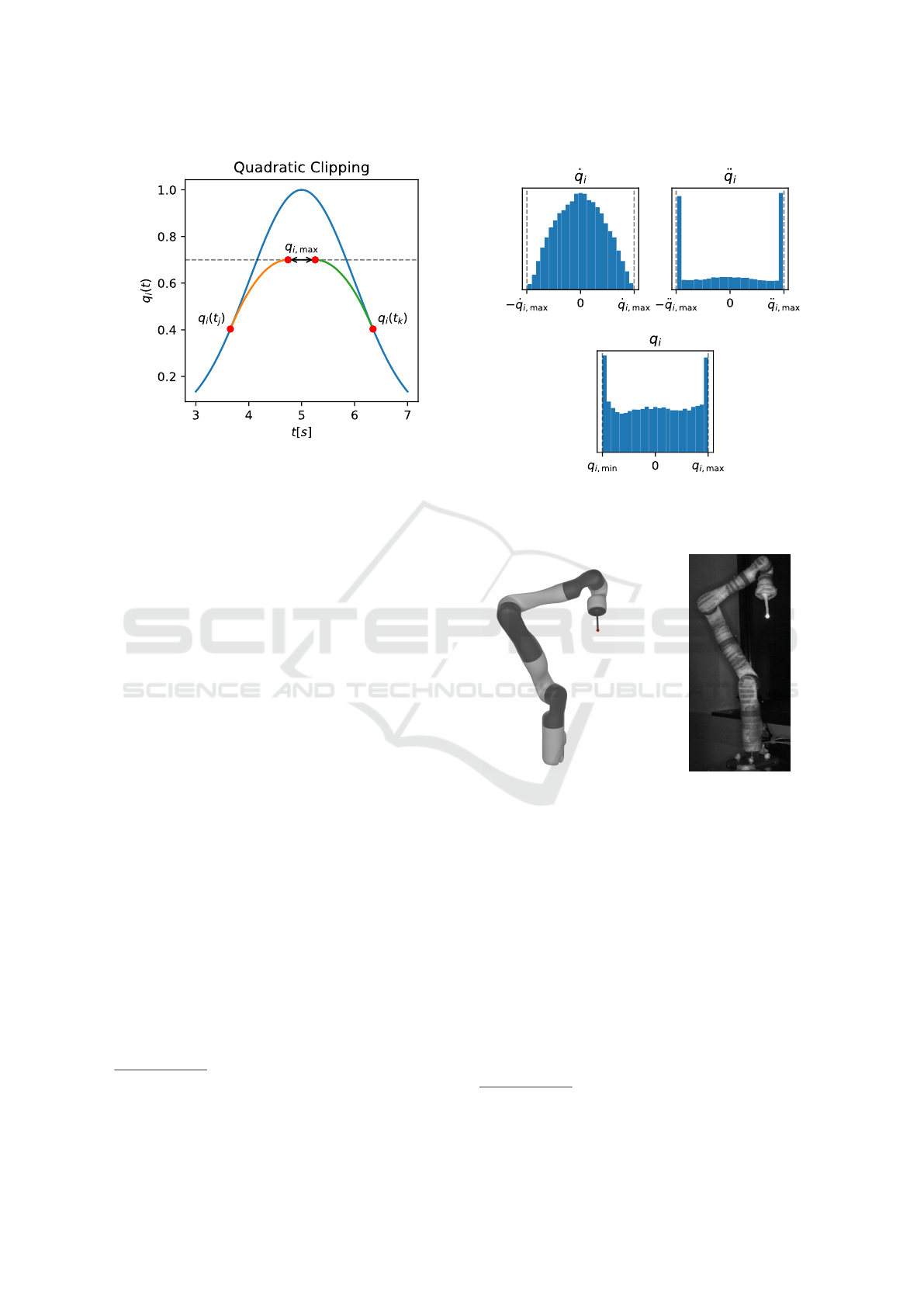
Figure 6: Clipping off out-of-range positions by replacing
with quadratic polynomials.
Closing this gap causes a slight reduction in overall
signal length. In combination with the artificial in-
crease in signal length by the local time scaling, this
necessitates the binary search for the optimal duration
as shown in Algorithm 1.
In summary, the proposed algorithm finds a
smooth random path for each joint that maximizes
the overall randomness under the given constraints
for the angles as well as angular velocity and accel-
eration. The distribution of a single generated trajec-
tory is shown in Figure 7. It is directly visible how
out-of-range values are shifted towards the limits of
the allowed range. For the angle q
i
, its distribution
thus resembles a uniform distribution with peaks at
its boundaries.
In Appendix A, we present an alternative ap-
proach to plan a feasible excitation trajectory by ob-
taining the Fourier coefficients of (2) directly from a
nonlinear optimization problem.
3.2 Simulation
To test the feasibility of the approach, we created
an experiment in the open-source software Blender
2
.
The scene contains a single camera as well as a model
of the Kinova Gen2 7 DoF robot
3
that has a spherical
marker attached to the tip of the end-effector as a tar-
get, as seen in Figure 8a. The goal of our approach
is to ensure the visibility of this target under arbitrary
movements of the robot. Using the Blender Python
2
https://www.blender.org/ (accessed January 29, 2024)
3
https://github.com/Kinovarobotics/kinova-ros (ac-
cessed January 29, 2024)
Figure 7: Distribution of a trajectory generated by the pro-
posed path generation algorithm as well as the distribution
of its first two derivatives.
(a) Simulation. (b) Laboratory Setup.
Figure 8: Simulated and real-world evaluation setups. The
simulation is based on the publicly available robot model of
the Kinova
TM
Gen2 robotic arm.
API
4
, we implemented a script that reads a trajec-
tory and simulates the robot’s pose for each time step.
Then, we determined whether the marker was visible
or hidden. This is done via a single traced ray, so it
is not necessary to render the full scene, resulting in
a simulation rate of ≈ 5 · 10
3
steps per second. The
simplification is necessary for efficient sampling and
results in a discontinuous binary output. Furthermore,
it is possible to simulate any non-smooth trajectory,
such as randomly sampled joint angles. This allows
to create data for testing against the generated smooth
trajectories.
4
https://docs.blender.org/api/current/index.html (ac-
cessed January 29, 2024)
Learning Occlusions in Robotic Systems: How to Prevent Robots from Hiding Themselves
487

3.3 Real-World Setup
We built a setup very similar to the simulation in our
laboratory, with the same Kinova robot, and attached
a 3D printed version of the instrument with a small
reflective sphere at its tip representing the point of
interest as shown in Figure 8b. We then utilized a
camera (Qualisys Arqus A9) with its own light source
to automatically detect whether the marker is visible
or not. This is achieved using thresholding visible
marker size, resulting in a similar binary signal as in
the simulation case. To prevent unwanted reflections
on smooth surfaces of the robot, we covered it in not-
reflective tape. We determined the limits for each of
the robotic joints to prevent collisions during the au-
tomatic capturing process and generated a trajectory
with a duration of 6 h. The trajectory is executed by
the Kinova robot using its ROS interface. Therefore,
a PD controller is designed to track the position and
velocity reference of the trajectory sufficiently con-
sidering the actual joint position and velocity mea-
surements. The resulting velocity commands are then
commanded to the robot’s joint drives.
3.4 Classification with Multilayer
Perceptrons (MLPs)
There are several Machine Learning (ML) algorithms
in the literature for supervised classification that have
one or more disadvantages (Bishop and Nasrabadi,
2006; Cover and Hart, 1967; McNicholas, 2016;
Cortes and Vapnik, 1995; Sch
¨
olkopf and Smola,
2005). Problems can arise from the complexity of the
model or the sensitivity of the hyperparameters. For
example, Nearest Neighbor models (Cover and Hart,
1967) require all training points to be stored, which is
not computationally feasible in our scenario. Other
ML models, like Support Vector Machines (Cortes
and Vapnik, 1995; Sch
¨
olkopf and Smola, 2005))
or Gaussian Models for Classification (McNicholas,
2016) use only a subset of the data. Unfortunately,
these models are highly dependent on hyperparam-
eters and also require high computational resources
when trained on raw data. In contrast to this, MLPs
have shown the ability to represent highly complex
functions (Hornik, 1991). With low layer counts the
computational requirements for training are low while
providing an efficient representation of the sampled
space. For this reason, they are used in learning high-
dimensional spaces, such as 5-dimensional scene rep-
resentations for view synthesis in Neural Radiance
Fields (NeRFs) (Mildenhall et al., 2021). Further-
more, due to their widespread availability in machine-
learning frameworks, they are easily deployed with
hardware acceleration, thus benefiting from a high de-
gree of parallelization. Another crucial benefit is that
it is computationally cheap to compute their gradi-
ent. This is necessary for integrating them as part of
a larger optimization problem in the context of trajec-
tory planning. One potential drawback of this method
is that MLPs are struggling to learn high-frequency
details. For the robot used in our scenario, this did not
pose any problems due to the simplicity of its geome-
try. However, for mesh-like structures with fine detail,
an approach based on a positional encoding would be
beneficial (Mildenhall et al., 2021).
In our case, the chosen network architecture starts
with an input layer with n inputs representing the
robot’s joint angles. A series of fully connected lay-
ers follows, each with a Rectified Linear Unit (ReLU)
activation function that we chose for their computa-
tional efficiency. Finally, a fully connected layer com-
bines the hidden layers’ activations and passes them
through a final single sigmoid activation function to
map the final output to the interval [0,1]. For opti-
mization, we chose the Adam optimizer (Kingma and
Ba, 2014). All hyperparameters were determined via
hyperparameter optimization using the Asynchronous
Successive Halving Algorithm (ASHA) scheduler (Li
et al., 2020) and the Optuna search algorithm (Akiba
et al., 2019). As a loss function we used binary cross-
entropy, which is a commonly used loss for binary
classification problems
L(Y
pred
,Y
true
) =
1
n
N
∑
i=1
−α
i
[ Y
true
i
logY
pred
i
(5)
+
1 −Y
true
i
log
1 −Y
pred
i
].
The balancing factor α
i
is used to increase the con-
tribution of underrepresented samples. With P being
the number of positive samples and N being the num-
ber of negative samples, the factor is set to
P+N
2P
for
positive and to
P+N
2N
for negative samples.
During the training, 20% of the data were used
as validation data. The validation and training data
are chosen as continuous parts of the trajectory, as
random shuffling would with a high likelihood cause
close training samples for every validation sample. To
further reduce this risk, a buffer between the two seg-
ments with a length of 1% of the data was removed
before training. Besides this evaluation data, for the
simulated scenario, we created a test set of 10
6
uni-
formly sampled robot configurations to avoid overfit-
ting on the validation data. All models were imple-
mented in the PyTorch framework and trained on a
consumer-level system with a Ryzen 3600 as a CPU,
a GTX 1660 Ti as a GPU, and 16 GB of Memory. We
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
488
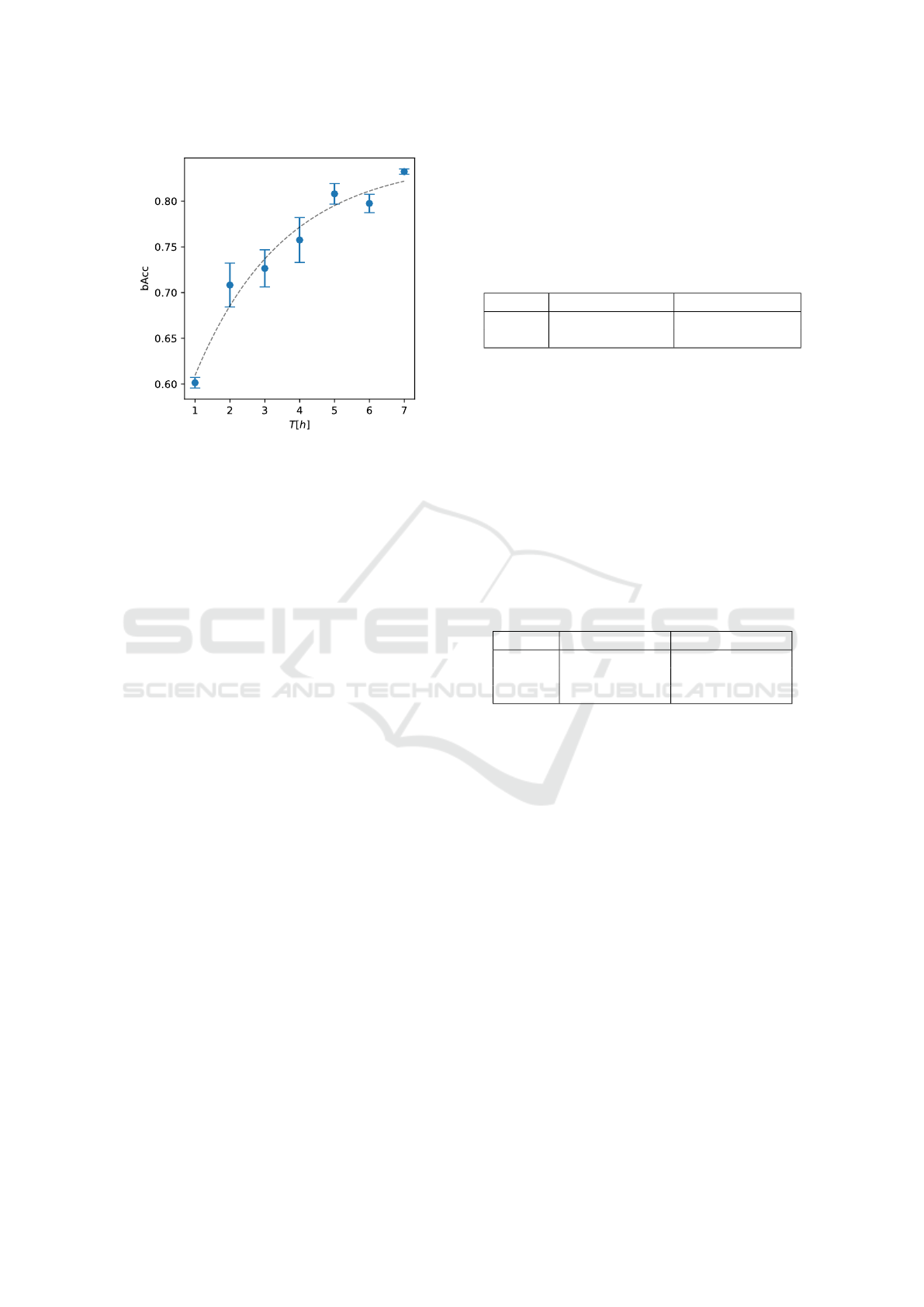
Figure 9: bAcc scores were measured on the test set for in-
creasing trajectory durations. For better visualization, the
dashed line shows a fit for an exponentially decaying func-
tion.
trained for 5 · 10
4
epochs but stopped early if no im-
provement was seen in the validation score for 10
3
epochs. In these conditions, training a single network
takes approximately 1 min.
4 RESULTS
In this section, we show the training results for the
MLPs with a focus on the required trajectory length,
the hyperparameter tuning, and computational effi-
ciency. Furthermore, we demonstrate with a short ex-
ample how the MLP can be integrated into trajectory-
planning to increase the overall visibility.
We initially established a baseline score by train-
ing on a simulated dataset of 10
6
uniformly sampled
joint states. When trained until saturation, the net-
work scored a balanced accuracy of 94% for predict-
ing the correct visibility of the chosen target.
For smooth simulated trajectories, the results
show increasing test scores as shown in Figure 9. Af-
ter a steep increase at the beginning, the increase in
gained balanced accuracy reduces at higher durations.
Due to these diminishing returns, we chose six hours
as the duration for all further experiments.
For a simulated trajectory with a duration of six
hours, the hyperparameter optimization yielded the
following results
• learning rate: 2 · 10
−3
,
• number of hidden layers: 2,
• size of hidden layers: 78.
With these parameters, when trained until satu-
ration on a simulated trajectory of 6 h, the model
achieves a balanced accuracy of 85% on the uni-
formly sampled test set. A more detailed view of this
result is shown by the confusion matrix in Table 1.
Based on these results, the recall for the visible class
Table 1: Confusion matrix for the predictions of the MLP
trained on a rendered 6 h smooth trajectory. The values are
normalized by the total number of samples in the test set.
Predicted Visible Predicted Hidden
Visible 74.28% 12.34%
Hidden 2.07% 11.30%
is 85.75% and 84.53% for the hidden class. Further-
more, the overall ratio of visible samples in the dataset
is 86.63%. The measured precision is 97.29% for the
visible and 47.80% for the hidden class.
To confirm these simulation results, we captured
the same 6 h trajectory on our real-world setup (see
Figure 8b) and trained the MLP on this data until
no further improvement was noticed. We obtained
slightly higher bAcc scores of 90% in this case.
When evaluating the model’s latency on 1 · 10
3
samples, we found the results shown in Table 2. Fur-
thermore, every measured latency stayed below 1 ms.
Table 2: Inference and gradient computation times for the
proposed MLP.
Forward-Pass Backward-Pass
mean 78 µs 391 µs
5% low 95 µs 478 µs
1% low 150 µs 626 µs
To show the feasibility of the proposed approach,
we chose a simple test case: Increasing the visi-
bility under the constraint of a stable end-effector.
We modeled this via the forward kinematics function
e(Q) : R
n
→ R
3
, that provides the position of the end-
effector for a given combination of joint angles Q.
Furthermore, the trained MLP is denoted as the func-
tion v(Q) that predicts the visibility of the robot at
a given state. For a starting configuration Q
start
we
find a trajectory that maximizes the visibility under
the constraint of a stable end-effector by reducing the
following loss
L(Q) = γ
e
||e(Q) − e(Q
start
)|| + γ
v
(1 − v(Q)). (6)
The first part of this loss reduces deviations in the end-
effector position from the initial configuration while
the second part increases the overall visibility using
the trained MLP. The weight factors γ
e
and γ
v
allow
us to put more emphasis on one of the two aspects
during optimization. In our case, we chose γ
e
= 10
4
and γ
v
= 1 to ensure a stable end-effector position.
The trajectory is then obtained by repeated com-
putations of the gradient ∇
Q
and changing Q in the
Learning Occlusions in Robotic Systems: How to Prevent Robots from Hiding Themselves
489
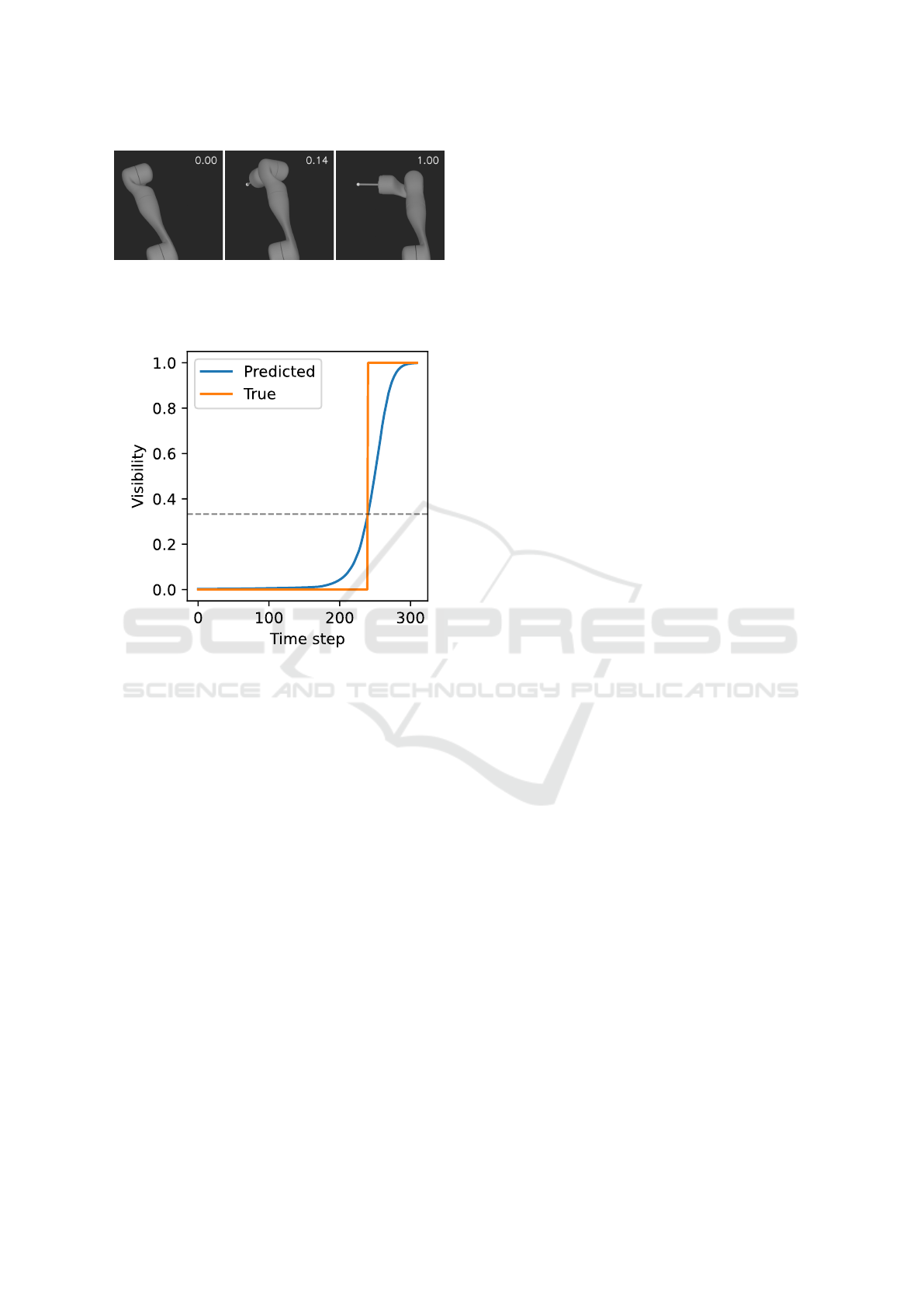
Figure 10: Renderings of a trajectory that maximizes the
visibility of the target at the end-effector (bright sphere)
while keeping it stable. The corresponding predicted vis-
ibility scores are shown in the upper right.
Figure 11: Predicted and rendered visibility along the gen-
erated trajectory.
opposite direction of this gradient. The generated
trajectory is shown qualitatively in Figure 10. As
shown in Figure 11, the predicted visibility increases
smoothly and corresponds to the measured visibility.
The object becomes visible at a predicted visibility
value of 0.33.
5 DISCUSSION
As shown by the 94% bAcc score on the synthetic uni-
formly sampled dataset, MLPs are a valid choice for
learning the complex occlusion behavior of robotic
systems. This score serves as a benchmark for smooth
random functions. As Figure 9 shows, the added vari-
ability in the data from an increased trajectory dura-
tion benefits the training results. However, even con-
sidering MLPs trained on 6 h trajectories with fine-
tuned hyperparameters, there is still a difference of 9
percentage points in the bAcc score. This shows that
even though the smooth random functions slowly ap-
proach the benchmark score, this method of sampling
does not fully reach the desired score at durations that
are feasible to run in real-world applications. When
investigating the results further, we found that the re-
call predicting either the visible or the hidden class
was close to the measured bAcc of 85%, however,
their respective recall is much higher for the visi-
ble class. This can largely be attributed to the high
class imbalance in our dataset, which highly favors
the visible class with 86.63%. The re-balancing fac-
tors caused by this imbalance drastically increase the
contribution of the hidden class to the overall loss,
which leads to the relatively high number of samples
falsely classified as hidden.
One major limitation of our sampling method is
that there is no feedback from the measured visibil-
ity to the sampling routine. This has the advantage
that it allows for both components to run on separate
hardware without the need for a real-time intercon-
nection. While the separation of surveillance and con-
trol systems might represent reality in many scenar-
ios, there are possibly important performance gains
to be found without this limitation. Furthermore, such
an approach would remove the need for synchroniza-
tion between the two systems.
Another limitation of the proposed method is its
reliance on a stationary camera. The MLP’s approxi-
mated function depends highly on the camera’s pose,
moving the camera requires retraining the model. At
the same time, the model generally does not depend
on the camera’s intrinsic. For this reason, changes in
distortion or focal length do not require resampling
and retraining the model.
An interesting finding is that the model’s perfor-
mance seems to be slightly higher on the real-world
data than on the rendered training data. This could
possibly be attributed to the small differences between
the real and the simulated scene. One of the param-
eters that could have influenced this difference is the
positioning of the camera, which differs between sim-
ulation and reality (see Figure 8).
Finally, we could show that the proposed method
of using MLPs is computationally efficient enough
for the application in real-time trajectory planning al-
gorithms. Inference and gradient computation in the
sub-ms latency range allows for real-time prediction
and optimization. As we have shown in the example
application, the trained MLP is easily integrated into
trajectory planning and allows for the continuous op-
timization of the robot’s observability under chosen
constraints.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
490

6 CONCLUSION AND OUTLOOK
In this paper, we proposed a method for automatically
improving the visual observability of robotic systems.
This method relies heavily on our two main contri-
butions, the automatic sampling of the training space
via modified smooth random functions as well as the
training and evaluation of lightweight MLPs to repre-
sent the occlusion function. While there is still room
for improvement due to the measured performance
gap between independently sampled data and smooth
trajectories, we could show that this approach works
well in the simulation and real-world experiments and
consistently shows high validation scores. We fur-
ther showed the modular integration in a trajectory-
planning example, where it successfully increased the
visibility under given constraints.
There are several directions for further research,
the most promising being a smart coupling of the tra-
jectory generation with live feedback from the camera
system. This would potentially allow for more effi-
cient approaches to sampling the boundary between
visible and hidden states, thus reducing the dimen-
sionality of the problem. Another promising approach
would be to disentangle camera pose, robot geometry,
and robot kinematics into several learned components
of a combined system. This would possibly allow it to
be more resilient against minor changes in the scene
and would only require minor retraining upon repo-
sitioning the camera. Another research direction is
investigating different robot geometries and material
properties. This could include semi-translucent and
reflective surfaces as well as the addition of positional
encodings for handling more complex joint geome-
tries.
ACKNOWLEDGEMENT
This research is funded through the Project ”OP
der Zukunft” within the funding program by
Europ
¨
aischen Fonds f
¨
ur Regionale Entwicklung
(REACT-EU).
REFERENCES
Akiba, T., Sano, S., Yanase, T., Ohta, T., and Koyama, M.
(2019). Optuna: A next-generation hyperparameter
optimization framework. In Proceedings of the 25th
ACM SIGKDD International Conference on Knowl-
edge Discovery and Data Mining.
Ayvaci, A., Raptis, M., and Soatto, S. (2012). Sparse occlu-
sion detection with optical flow. International journal
of computer vision, 97:322–338.
Bishop, C. M. and Nasrabadi, N. M. (2006). Pattern recog-
nition and machine learning, volume 4. Springer.
Boroushaki, T., Leng, J., Clester, I., Rodriguez, A., and
Adib, F. (2021). Robotic grasping of fully-occluded
objects using rf perception. In 2021 IEEE Inter-
national Conference on Robotics and Automation
(ICRA), pages 923–929. IEEE.
Brodersen, K. H., Ong, C. S., Stephan, K. E., and Buhmann,
J. M. (2010). The balanced accuracy and its posterior
distribution. In 2010 20th international conference on
pattern recognition, pages 3121–3124. IEEE.
Cortes, C. and Vapnik, V. (1995). Support-vector networks.
Machine learning, 20:273–297.
Cover, T. and Hart, P. (1967). Nearest neighbor pattern clas-
sification. IEEE transactions on information theory,
13(1):21–27.
Danielczuk, M., Angelova, A., Vanhoucke, V., and Gold-
berg, K. (2020). X-ray: Mechanical search for an oc-
cluded object by minimizing support of learned occu-
pancy distributions. In 2020 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 9577–9584. IEEE.
Fan, X., Simmons-Edler, R., Lee, D., Jackel, L., Howard,
R., and Lee, D. (2021). Aurasense: Robot colli-
sion avoidance by full surface proximity detection. In
2021 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 1763–1770.
IEEE.
Filip, S., Javeed, A., and Trefethen, L. N. (2019). Smooth
random functions, random odes, and gaussian pro-
cesses. SIAM Review, 61(1):185–205.
Gandhi, D. and Cervera, E. (2003). Sensor covering of a
robot arm for collision avoidance. In SMC’03 Con-
ference Proceedings. 2003 IEEE International Con-
ference on Systems, Man and Cybernetics. Confer-
ence Theme-System Security and Assurance (Cat. No.
03CH37483), volume 5, pages 4951–4955. IEEE.
Guizzo, E. (2019). By leaps and bounds: An exclusive look
at how boston dynamics is redefining robot agility.
IEEE Spectrum, 56(12):34–39.
Hornik, K. (1991). Approximation capabilities of mul-
tilayer feedforward networks. Neural networks,
4(2):251–257.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Li, L., Jamieson, K., Rostamizadeh, A., Gonina, E., Ben-
Tzur, J., Hardt, M., Recht, B., and Talwalkar, A.
(2020). A system for massively parallel hyperparam-
eter tuning. Proceedings of Machine Learning and
Systems, 2:230–246.
Liu, Y., Li, Y., Zhuang, Z., and Song, T. (2020). Improve-
ment of robot accuracy with an optical tracking sys-
tem. Sensors, 20(21):6341.
McNicholas, P. D. (2016). Mixture model-based classifica-
tion. CRC press.
Mildenhall, B., Srinivasan, P. P., Tancik, M., Barron, J. T.,
Ramamoorthi, R., and Ng, R. (2021). Nerf: Repre-
senting scenes as neural radiance fields for view syn-
thesis. Communications of the ACM, 65(1):99–106.
Learning Occlusions in Robotic Systems: How to Prevent Robots from Hiding Themselves
491

Park, K.-J. (2006). Fourier-based optimal excitation trajec-
tories for the dynamic identification of robots. Robot-
ica, 24(5):625–633.
Rijsbergen, C. v. (1979). Information retrieval 2nd ed but-
tersworth. London [Google Scholar], 115.
Sch
¨
olkopf, B. and Smola, A. (2005). Support vector ma-
chines and kernel algorithms. In Encyclopedia of Bio-
statistics, pages 5328–5335. Wiley.
Shintemirov, A., Taunyazov, T., Omarali, B., Nurbayeva,
A., Kim, A., Bukeyev, A., and Rubagotti, M. (2020).
An open-source 7-dof wireless human arm motion-
tracking system for use in robotics research. Sensors,
20(11):3082.
Silva, C. and Santos-Victor, J. (2001). Motion from oc-
clusions. Robotics and Autonomous Systems, 35(3-
4):153–162.
St
¨
urz, Y. R., Affolter, L. M., and Smith, R. S. (2017).
Parameter identification of the kuka lbr iiwa robot
including constraints on physical feasibility. IFAC-
PapersOnLine, 50(1):6863–6868. 20th IFAC World
Congress.
Swevers, J., Ganseman, C., De Schutter, J., and Van Brus-
sel, H. (1997a). Generation of Periodic Trajectories
for Optimal Robot Excitation. Journal of Manufac-
turing Science and Engineering, 119(4A):611–615.
Swevers, J., Ganseman, C., Tukel, D., de Schutter, J., and
Van Brussel, H. (1997b). Optimal robot excitation and
identification. IEEE Transactions on Robotics and Au-
tomation, 13(5):730–740.
Vedaei, S. S. and Wahid, K. A. (2021). A localization
method for wireless capsule endoscopy using side
wall cameras and imu sensor. Scientific reports,
11(1):11204.
Zheng, Z., Ma, Y., Zheng, H., Gu, Y., and Lin, M.
(2018). Industrial part localization and grasping using
a robotic arm guided by 2d monocular vision. Indus-
trial Robot: An International Journal.
APPENDIX
A OPTIMIZATION-BASED
TRAJECTORY GENERATION
An alternative approach to the trajectory generation
described in Section 3.1 is to obtain the Fourier co-
efficients for (2) by solving an optimization problem
to ensure that the trajectory provides a sufficient ex-
citation of the robot’s joint space. This removes the
required post-processing step while ensuring that the
robot’s kinematic and dynamic limits are satisfied.
Therefore, we define a cost function that maximizes
the energy of the trajectory for each joint, while min-
imizing the cross-correlation with the trajectories of
the other joints. According to Parseval’s theorem, the
energy of a signal is identical to the sum of its squared
Fourier coefficients. These considerations lead to the
cost function
J(π) =
n
∑
i=1
−w
e
m
∑
k=0
a
2
i,k
+ b
2
i,k
+w
c
n
∑
j=1
j̸=i
ρ(q
j
(t),q
i
(t))
(7)
where ρ(q
j
(t), q
i
(t)) denotes the Pearson correlation
coefficient between the two Fourier series (2). The
influences of the energy and cross-correlation terms
are weighted with the positive factors w
e
and w
c
. The
vector π contains the Fourier coefficients as optimiza-
tion variables. Including the above-described kine-
matic and dynamic constraints gives the nonlinear op-
timization problem
π = argmin
π
J(π) (8a)
s.t
q
i,min
≤ a
i,0
+
m
∑
k=1
q
a
2
i,k
+ b
2
i,k
≤ q
i,max
(8b)
m
∑
k=1
2πk
T
q
a
2
i,k
+ b
2
i,k
≤ ˙q
i,max
(8c)
m
∑
k=1
2πk
T
2
q
a
2
i,k
+ b
2
i,k
≤ ¨q
i,max
(8d)
b
i,0
= 0 (8e)
where the constraints (8b)–(8e) must be satisfied for
all joints i ∈ {1, . . . , n}.
The nonlinear optimization problem (8) is imple-
mented in Python with NumPy. It is solved by the
minimize function from SciPy using the constrained
optimization by linear approximation (COBYLA) al-
gorithm. The Jacobians of the cost function and the
nonlinear constraints are estimated using numerical
differentiation.
Kinematic constraints in the Cartesian workspace
of the robot can be easily included in the optimization
problem by using the forward kinematic of the robot.
The presented approach works with up to 50 modes,
while the coverage of the state space decreases with a
higher number of modes. This may be due to the ap-
proximations (8b)–(8d), which overestimate the max-
imum amplitudes for position, velocity, and acceler-
ation of the trajectories. This can be resolved by an
equidistant sampling of the trajectories and defining
the corresponding linear inequality constraints. The
drawback of this method is that the computational
cost depends largely on the accuracy of the sampling,
while the constraints may be violated between two
sampling points.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
492
