
Directional Filter for Tree Ring Detection
R
´
emi Decelle
1
, Phuc Ngo
2
, Isabelle Debled-Rennesson
2
, Fr
´
ed
´
eric Mothe
3
and Fleur Longuetaud
3
1
Univ. Lyon, Univ. Lyon 2, CNRS, INSA Lyon, UCBL, LIRIS, UMR5205, France
2
Universit
´
e de Lorraine, CNRS, LORIA, UMR 7503, Vandoeuvre-l
`
es-Nancy, F-54506, France
3
Universit
´
e de Lorraine, AgroParisTech, INRAE, SILVA, F-54000 Nancy, France
Keywords:
Polar Quad-Tree Decomposition, Confidence Map, Tree Ring Width Estimation, Cross-Section Wood Image.
Abstract:
This paper presents an approach to automatically detect tree rings and subsequent measurement of annual ring
widths in untreated cross-section images. This approach aims to offer additional insights on wood quality. It is
composed of two parts. The first one is to detect tree rings by using directional filters together with an adaptive
refining process allowing to extract the rings from radial information for different angles around the tree pith.
The second step consists in building a confidence map by considering polar quad-tree decomposition which en-
ables us to identify the relevant regions of image for conducting the tree ring width measurements.The method
is evaluated on two public datasets, demonstrating good performance in both detection and measurement. The
source code is available at https://gitlab.com/Ryukhaan/treetrace/-/tree/master/treerings.
1 INTRODUCTION
Measuring tree rings of wood cross-sections is widely
used to study tree growth. By measuring and dating
all the tree rings from the center of the tree (pith) to-
ward the bark, it is possible to reconstruct the past life
of the tree and make assumptions about its growth
conditions, including climate. Tree-rings are tradi-
tionally hand-measured, a process that demands sig-
nificant time and human effort. In the past, several
studies have been proposed for automating the detec-
tion of tree rings using computer vision techniques
(e.g., (Conner et al., 1998; Laggoune et al., 2005)).
However, these methods work on well-prepared wood
samples and function in a semi-automatic manner.
In this work, we are interested in automatic tree
ring analysis on color images of rough and untreated
log ends (see Figure 1). Such images may exhibit dis-
turbances like blurring, sawing marks or ambient light
variations, which make the analysis more challenging
(see wood patches in Figure 2). Furthermore, tree ring
detection remains an active research topic today be-
cause of the difficulty of detection on certain species,
particularly hardwoods (e.g., oak, beech, alder).
Recent studies in this area are often based on deep
learning approaches (e.g., (Fabija
´
nska and Danek,
2018; Marichal et al., 2023b; Pol
´
a
ˇ
cek et al., 2023)).
Most of these methods work with radial cores or strips
of wood which provide partial information about the
tree-ring structure. Nevertheless, growth rings can
also be measured on a more macro scale, utilizing en-
Figure 1: Rough wood cross-section RGB image.
Figure 2: Exhibit disturbances of wood cross-section.
tire wood cross-section images, with the aim of pro-
viding information about the wood’s quality. For soft-
852
Decelle, R., Ngo, P., Debled-Rennesson, I., Mothe, F. and Longuetaud, F.
Directional Filter for Tree Ring Detection.
DOI: 10.5220/0012457000003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 852-859
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

woods (e.g., Douglas fir, pine, spruce), narrow rings
are generally associated with a good mechanical qual-
ity for use in construction and therefore also have an
influence on the price of wood.
This article addresses the automatic measurement
of growth rings, for use in forests or sawmills, to en-
able better quality assessment of logs. This work de-
scribes a method to automatically detect tree rings on
segmented untreated log images by taking advantage
of general structure of tree cross-sections. More pre-
cisely, the method utilizes directional filters together
with an adaptive refining process to extract tree rings
from radial information for different angles around
the pith. From the detected tree rings, we generate
a confidence map by considering polar quad-tree de-
composition of the input image. This map enables us
to identify the most relevant regions of image for con-
ducting measurements, such as tree ring widths. The
method is evaluated on two public datasets (Longue-
taud et al., 2022; Marichal et al., 2023b) containing
untreated cross-sectioned wood images. Comparisons
are made with recent deep-learning approaches (Chen
et al., 2018) to demonstrate its good performance in
both detection and measurement. The source code is
available at https://gitlab.com/Ryukhaan/treetrace/-/
tree/master/treerings.
2 RELATED WORKS
In this section, we summarize existing algorithms ap-
plied on comparable unprepared images, resembling
those examined in this paper. In particular, our focus
is primarily on recent algorithms that might be partic-
ularly relevant to our specific case. More details of
various methods for tree ring detection can be found
in (Marichal et al., 2023b, Section 2).
(Fabija
´
nska and Danek, 2018) proposed an auto-
matic tree-ring boundary detector built upon the U-
Net convolutional network. The proposed method
focuses on wood core samples of tree ring porous
species. They achieved a precision of 97% and a re-
call of 96%. It is mentioned that the tree-ring bound-
aries are accurately aligned with the real ones. How-
ever, minimal manual adjustments are needed, pri-
marily around the pith, where tree-ring boundaries are
less distinct, displaying varying tilts and orientations.
Besides, they exclusively utilized core wood images
rather than full cross-sections of tree log ends.
(Makela et al., 2020) proposed automated meth-
ods for locating the pith (center) of a tree disk, and
ring boundaries. The proposed methods are based on
combination of standard image processing techniques
and tools from topological data analysis. However,
these methods were assessed using 2D slices from 3D
X-ray CT images of cross-sectioned tree trunks. Nei-
ther the code nor the data are publicly available.
(Gillert et al., 2023) addressed the problem of de-
tecting tree rings on whole cross-section images as an
instance segmentation task. For that, they proposed
an iterative method, called Iterative Next Boundary
Detection (INBD). More precisely, an input image is
passed through a semantic segmentation network that
detects 3 classes: background, ring boundaries and
ring center. Then, a polar grid is sampled starting
from the detected ring center and passed to the INBD
network to detect the next ring. The latter is repeated
until the background is encountered. Their method
was exclusively applied to microscopy images.
(Pol
´
a
ˇ
cek et al., 2023) presented a supervised Mask
R-CNN for detection and measurement of tree-rings
from coniferous species. The CNN was trained and
validated on RGB images of cross-dated microtome-
cut conifers, with over 8000 manually annotated
rings. Different pre- and post-processing have been
applied to improve the model accuracy. They ob-
tained a precision of 94.8% and a recall of 98.7%
compared to cross-validated human detection. How-
ever, as most of the reviewed results, the approach
works on cores rather than the whole cross-section.
(Marichal et al., 2023b) introduced a novel non-
deep-learning approach to describe rings. A ring is
composed of nodes linked between them which create
a chain. A node is always on ray outwards from the
pith. A chain is a ring if it is closed. All rings form
a set called a spider web. Their definition allows to
fit better tree rings. Their approach focuses on creat-
ing the spider web which is the closest to the rings on
the cross-section image. Their results show a F-score
of 89% on the UruDendro dataset (Marichal et al.,
2023a). However, the cross-section were smoothed
with a handheld planer and a rotary sander, meaning
that the cross-section is not raw. Their code is pub-
licly available.
3 METHOD
Our tree-ring detection (TRD) algorithm is based on
directional approach. Indeed, rings are roughly con-
centric, even if their shape is irregular (mainly at the
border of the log). This leads to the following charac-
teristics:
• Two rings will never overlap;
• A ray traced outwards from the pith will cross
each ring only once;
• A ring is delimited by two edges.
Directional Filter for Tree Ring Detection
853
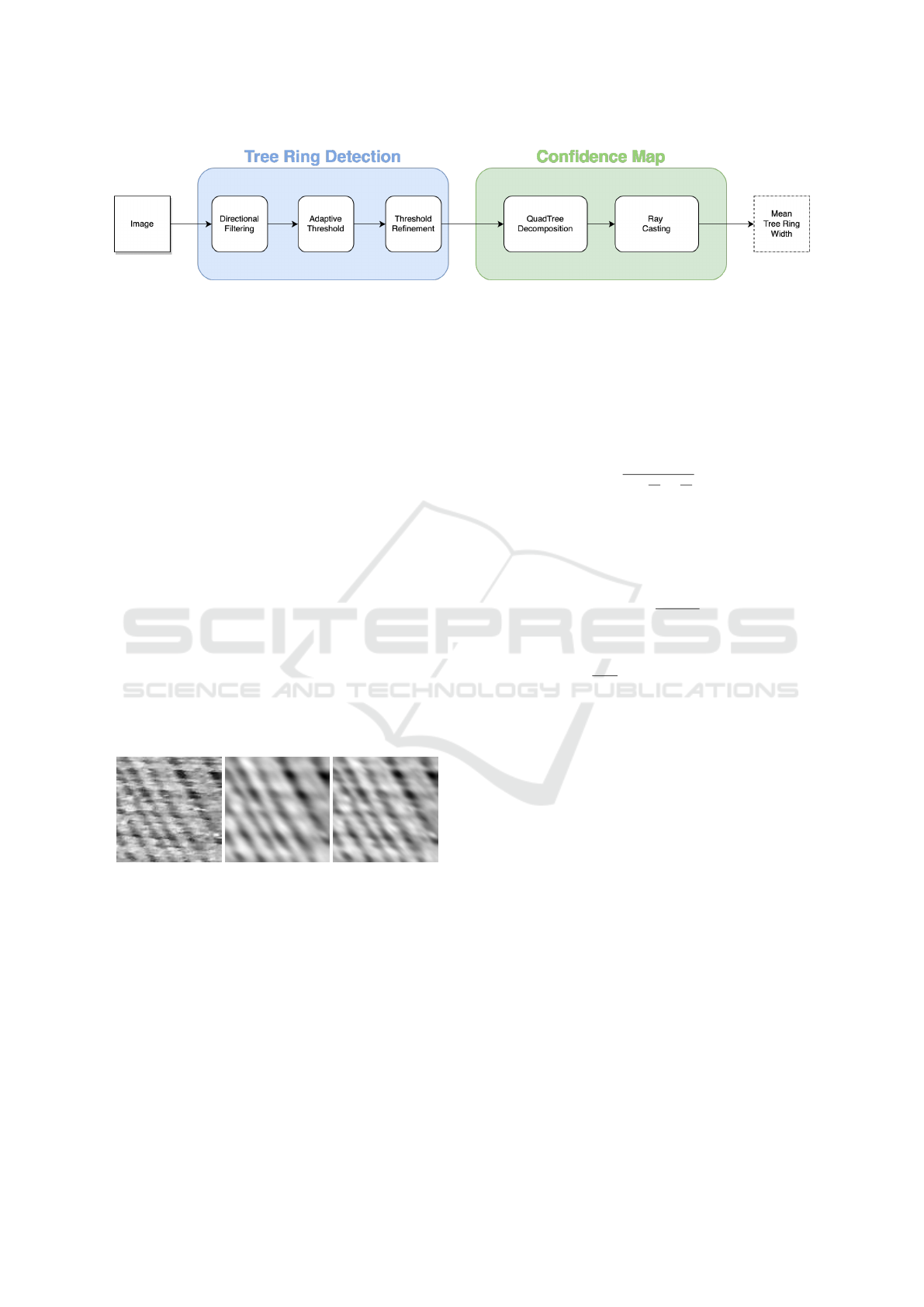
Figure 3: The global overview of our method.
Our method is compose of two parts. The first
one focuses on TRD. The second one will estimate re-
gions where the detection should be good enough to
process some measurements, e.g., mean of tree ring
widths. The big picture of our method is shown in
Figure 3. The key feature of our proposal is that TRD
and estimation are separated, allowing to easily re-
place either step in future works.
3.1 Tree Ring Detection (TRD)
In order to delineate tree rings, we assume that the log
end image is segmented (Decelle et al., 2023; Wim-
mer et al., 2021). First, the input RGB image is con-
verted into grayscale using usual formulae.
The next step aims at highlighting tree ring transi-
tions and reducing noisy using directional filters. For
this, we assume that the pith position is known. Au-
tomatic algorithms have already been proposed for
this task (Norell and Borgefors, 2008; Kurdthongmee,
2020; Decelle et al., 2022).
3.1.1 Directional Filtering
(a) Input image (b) Lorentz (c) Gaussian
Figure 4: One example to highlight the choice of Lorentz
function instead of Gaussian function in Equation 2. Tree
rings are more connected with the Lorentz function than
gaussian function.
At first, we need a filter that preserve edges of the
input image I, i.e. it preserves the ring boundaries.
In order to reduce noise along the tangential direc-
tion of tree rings, we consider a modified directional
Gaussian filter. The standard Gaussian domain ker-
nel exhibits symmetry relative to the window center.
To address the smoothing of image structures while
incorporating orientation and anisotropy, we use an
oriented kernel inspired by (Venkatesh and Seelaman-
tula, 2015). Let p = (p
x
, p
y
) ∈ I be the pixel to update
and q = (q
x
, q
y
) ∈ V (p) be pixels in its neighborhood.
In practice, V (p) is a window of size n ×n pixels.
I
′
(p) =
∑
q∈V (p)
f (p − q)I (q
x
− p
x
, q
y
− p
y
) (1)
where
f =
1
1 +
x
θ
σ
x
+
y
θ
σ
y
(2)
with
x
θ
= (q
x
− p
x
)cos(θ)−(q
y
− p
y
)sin(θ)
y
θ
= (q
x
− p
x
)sin(θ)+(q
y
− p
y
)cos(θ)
and θ is the angle between p and the pith c.
θ = arctan (
p
y
− c
y
p
x
− c
x
) (3)
The parameters σ
x
and σ
y
control the kernel width
in x-axis and y-axis, respectively. We used the
Lorentz function
1
1+x
2
over a Gaussian function be-
cause the former one is more spread in the direction
θ than the latter one. This allows to filter more in
the direction of θ than using a Gaussian. Figure 4
shows the difference between the Lorentz and Gaus-
sian function with same pamareters for both. We can
observe that tree rings show better connection charac-
teristics with Lorentz than with a Gaussian function.
Figure 5 shows an example of the result obtained with
the proposed directional filter.
This filter is also interesting for its computational
efficiency. Since the kernel has to be computed
for each pixel, having a fast kernel computation is
needed. Moreover, reducing time for filtering will al-
lows us to spend more time in selection area for mea-
suring tree ring widths (see Section 3.2).
3.1.2 Adaptive Threshold
After the filtering, we need to find the tree ring bound-
ary. This is done by two steps: the filtered image is
first thresholded, then the result is refined. We pro-
pose to use a fast threshold: adaptive mean threshold
(Gonzalez, 2009). The threshold value is the mean of
the neighbourhood intensity minus a constant C. An
example is given in Figure 6 (left).
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
854

Figure 5: Left: Grayscale image. Right: Filtered image. At
the top left of the images, a zoom of the red rectangle.
Figure 6: Left: Raw thresholded image. Right: Thresholded
image after removing small areas.
3.1.3 Thinning
The previous adaptive threshold leads to thick tree
rings. In order to make them thinner, we suggest the
following steps. We remove all small connected com-
ponents. Since such components have not enough in-
formation to estimate tree rings widths. For that, we
first apply dilatation morphology in order to reconnect
the regions. Then, if a region has less than 200 pixels,
it is removed. This is illustrated in Figure 6 (right).
Finally, we focus on transitions from latewood
(low intensity) to earlywood (high intensity) from the
pith outwards (i.e. from the pith to the bark). It corre-
sponds to a transition between white and black pixels
according to the outward direction from the pith. A
result of the thinning process is given in Figure 7.
Figure 7: Left: Result obtained after thinning the previous
thresholded image. Right: Delineation over the raw RGB
image.
3.2 Confidence Map (CM)
Instead of trying to fully reconnect the detected seg-
ments to form closed rings, we propose here to parti-
tion the images into regions. We aim to identify the
most relevant regions to make measurements. For that
we will attribute a confidence value to each region,
which will be seen as a confidence map (CM).
3.2.1 Polar Quad-Tree Decomposition
Since tree rings are close to concentric circles, we de-
cide to split the image according to a polar quad-tree
decomposition. Such a decomposition is well-known
to decompose an image into regions in a recursive
way. This technique reveals information about the im-
age structure, and in our case, the information about
how well tree rings have been segmented.
The pith is the center of the decomposition. The
first (and biggest) region is a circle with the pith as
center and a radius covering the cross-section. There
are three conditions to stop the subdivision process:
1. the region should be not too large to estimate
some directional characteristics. So, we suggest
to split until the tree depth reaches ρ
min
;
2. the region should be not too small in order to have
significant measurements. This purpose is done
by stop splitting if the depth is greater than ρ
max
;
3. finally, the orientations in each region are all ho-
mogeneous.
Indeed, even if the detected tree rings are not glob-
ally connected, at a local level they are. Then, the
orientations should be homogeneous in such region.
This is why we choose the third criterion to stop or
continue the subdividing.
To estimate local orientations, we use discrete ge-
ometry. More precisely, the tool proposed in (Decelle
et al., 2021). However, this method is a little bit time-
consuming. Therefore, we decide to apply it for d
random selected points in each region. Each point
provides us a set of orientations.
At the end, we obtain N
d
possible orientations θ
i
.
The homogeneous criterion is the variance of those
orientations. Set:
S =
1
N
d
i=N
d
∑
i=1
sin(2θ
i
)
and
C =
1
N
d
i=N
d
∑
i=1
cos(2θ
i
)
The variance is computed as follows:
R =
p
¯
S
2
+
¯
C
2
Directional Filter for Tree Ring Detection
855

Figure 8: Example of polar quad-tree decomposition. We
show non-thin segmentation to hightlight link between seg-
mentation and evaluated confidence.
By definition, R is in range of 0 and 1. This al-
lows us to interpret the value as a quality of the region.
If all θ
i
are the same, then S
2
+C
2
= 1, then R = 1.
It defines the confidence value of the current region.
A region will be split if its variance is lower than ε,
meaning that the region is not enough homogeneous.
Figure 8 shows the proposed method of image de-
composition to provide a confidence map. Green re-
gions are reliable regions, i.e. R ≥ ε. Orange regions
have a value of ε > R ≥
ε
2
. And red regions have a
value of R <
ε
2
. In this figure, ε = 0.98.
4 EXPERIMENTS AND RESULTS
4.1 Datasets
To test the proposed method, we consider two
datasets:
1. The dataset (Longuetaud et al., 2022) from which
6 images have the tree-rings being fully and man-
ually delineated. Plus 62 images in a core-style
(see Figure 10 were created and manually seg-
mented in this dataset.
2. The UruDendro dataset (Marichal et al., 2023a),
which is available online and composed of cross-
section images of Pinus taeda species from north-
ern Uruguay, ranging from 13 to 24 years old. It
has a total of 64 images at different resolutions.
Pith positions are also given.
4.2 Metrics
To evaluate the method and compare with the others,
we consider 2 different metrics. First one is to eval-
uate the tree ring widths, since it is the criteria most
often used for qualifying tree growth. However, such
measurements do not evaluate the quality of the de-
lineation. Thus, we have to determine whether the de-
tected rings are closed to the ground truths by assign-
ing them to the closest ground truth rings and compute
a distance metric for the detection’s quality.
4.2.1 Tree Ring Widths
The tree ring widths are directly correlated to wood
quality. In each image, we obtain an estimated mean
tree ring width, denoted as ˆy. Afterwards, standard
metrics can be calculated to assess the accuracy of the
estimated mean of the tree ring widths:
RMSE =
s
1
n
∑
i
( ˆy
i
− y
i
)
2
Biais =
1
n
∑
i
( ˆy
i
− y
i
)
Err =
RMSE
1
n
∑
i
y
i
4.2.2 Hausdorff Distance
From a computer vision point of view, the mean width
measurement alone does not convey the accuracy of
the tree ring segmentation. Specifically, a uniform
shift in all ring boundaries does not change the mean
width. Consequently, to assess the segmentation qual-
ity, we rely on an alternative metric.
First, for every detected tree ring, we link it to
the nearest ground truth ring. We measure the dis-
tance between the ring boundary and the ground truth
based on the average Hausdorff distance (Aydin et al.,
2021). Given two sets A and B, the Hausdorff dis-
tance between these two sets is calculated as follows:
d(A, B) =
1
|A|
∑
a∈A
d(a, B)
where
d(a, B) = min
b∈B
(d(a, b) )
The distance between two points is computed with
the euclidean distance:
d(a, b) =
|
|a − b|
|
2
Finally, the mean Hausdorff distance is computed
as follows:
d
haus
(A, B) =
1
2
(d(A, B) + d(B, A))
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
856

Our evaluation metric is the mean for all rings:
¯
D
hauss
=
1
n
n
∑
i=1
d
haus
(A
i
, B
i
) (4)
4.3 Experiments
This section presents several experiments to under-
stand and highlight the method and its limitations.
The following table 1 sums up all parameter values
used in experiments for our method.
Table 1: Summary of TRD and CM parameter values used.
TRD param. σ
x
σ
y
n window C
1.0 5.0 3σ
x
+ 1 31 2
CM param. ρ
min
ρ
max
N ε
3 4 10 0.98
Figure 9: Examples of training images of size 128 × 128
pixels. Targeted TRD are shown in green.
4.4 Neural Network
We aim to conduct a comparative analysis between
our method and deep-learning approaches. For that,
we have also trained DeepLabV3Plus for tree ring
segmentation (Chen et al., 2018) with ResNet-101
(He et al., 2016) as backbone and pre-trained on ima-
genet (Russakovsky et al., 2015).
We have 6 (over 208) images from (Longuetaud
et al., 2022) and 4 (over 64) images from Uruden-
dro dataset (Marichal et al., 2023a). The images were
spitted into patches of size 128 × 128 pixels, which
lead to 8537 patches in total. We use data augmenta-
tion with a dihedral group of eight orientations (D8)
and several blur (motion, gaussian, and so on). The
training set has 80% of images and validation set has
20% of images. The test set is composed of unseg-
mented images from (Longuetaud et al., 2022) dataset
and images not included for the training in Uruden-
dro dataset. Figure 9 shows some examples of images
used for training and validation. We have ordered the
images, in our point of view, from easiest to the most
difficult to segment.
The network operates by taking image patches and
generating predictions based on the small local win-
dows. However, this approach may result in higher
prediction errors, in particular, near the borders of the
patches. It is worsen when concatenating the predic-
tions and leading to disconnected and/or incoherent
tree ring segmentation.
A potential solution involves adjusting the sizes
of inputs and outputs during training, utilizing a
large neural network during testing. Yet, implement-
ing such a strategy is challenging and not memory
friendly. A more straightforward solution is to use
some 2D interpolation between overlapping patches
of final predictions. This is our adopted approach.
First, we use overlapping patches to have different
global context for the same tree rings. We propose a
50% overlap of patches, which is a good compromise
between inference time and reduction of undesirable
side effects. Second, we use rotations and mirrors, so
as to make the neural network view the image under
several different angles (using dihedral group of eight
orientations called D8 as used for data augmentation).
The 8 predictions are then averaged, and thus reduces
variance in predictions.
4.5 Results
Table 2: Values of RMSE, Biais and Percentage error (Err).
Values are in mm for (Longuetaud et al., 2022) and in pixels
for (Marichal et al., 2023a). CM indicates if Confidence
Map has been included or not.
CM RMSE Biais Err
Logyard (in mm)
Our method ✓ 0.830 -0.441 0.148
Our method 0.962 -0.034 0.171
DeepLabV3+ ✓ 1.082 -0.702 0.212
DeepLabV3+ 1.445 -0.019 0.257
Urudendro (in pixels)
Our method ✓ 14.626 -5.316 0.281
Our method 16.879 -15.175 0.325
DeepLabV3+ ✓ 12.886 -3.16 0.248
DeepLabV3+ 16.006 3.986 0.308
We perform the whole method on each mentioned
dataset (Section 4.1). We also perform an abla-
tion study to evaluate the interest of each part (TRD
and CM). More precisely, we perform TRD alone,
TRD combined with CM, DeepLabV3+ alone and
DeepLabV3+ combined with CM. Section 2 shows
the values of RMSE, bias, and the percentage of error
for each experiments (Section 4.2.1).
First, we can observe that processing the confi-
dence map increases the quality of the estimation.
On the Urudendro dataset, confidence map combined
with deep learning provides the best results. However,
deep learning method is less accurate on (Longuetaud
et al., 2022) dataset. An explication is that 4 over 64
images from Urudendro dataset have been used for
training and only 6 over 208 images have been used
for (Longuetaud et al., 2022) dataset. This leads to an
imbalance training set. Furthermore, there are more
Directional Filter for Tree Ring Detection
857
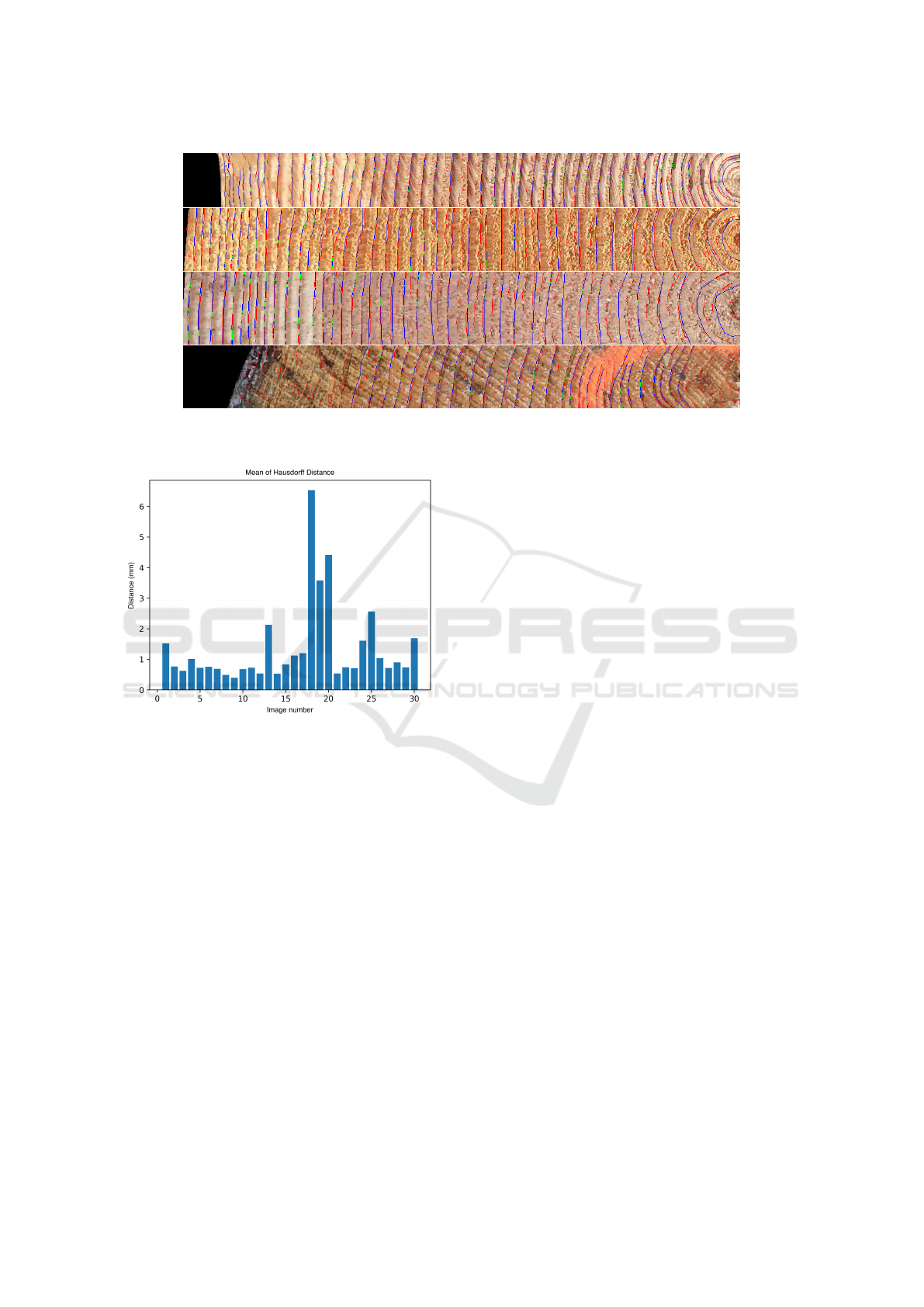
Figure 10: Four examples of extracted sub-images to assess the segmentation quality. Blue lines are ground truth, red lines
are predicted boundaries and green lines are boundaries where predicted and ground truth match.
Figure 11: Mean Hausdorff Distance for 30 sub-images
with ground truths.
images similar to Figure 10 most-left and left than
most-right and right in training set. Neural network
learned to detect edges but struggled to detect bound-
aries when there are strong noises. Our method also
struggles to detect such boundaries but, since the ori-
entation is assumed to be known, strong noises are
reduced.
Concerning the bias, it is −0.441 mm for
(Longuetaud et al., 2022) dataset with confidence in-
cluded and −0.034 mm without. Deep learning ap-
proach seems to overestimate the width. This could
be due to not well-segmented tree rings. It detects less
boundaries than our proposed method does (see Fig-
ure 10). Using the confidence map reduces the biais
and sometimes even makes it negative. One explana-
tion is that tree rings are more visible outwards the
pith and are well-segmented, but those tree rings have
smaller width than those close to the pith. This also
explains why the bias is always negative.
Furthermore, these values should be considered in
light of how the ground truth was obtained, for at least
(Longuetaud et al., 2022) dataset. The ground truth
was obtained from 4 orthogonal directions, while in
our method, we potentially consider all possible di-
rections. Additionally, the resolution of the processed
images is not the same as that used for the ground
truth. We cannot be more precise than a certain dis-
tance due to the image resolution. On average, one
pixel is equivalent to 0.21 mm, meaning that a varia-
tion of one pixel results in a variation of around 3.75%
from the ground truth.
Nonetheless, all these values are encouraging and
support our method for both tree ring detection and
confidence map. Some refinements should lead to
better estimation.
As we already said, a good estimation of tree ring
width does not imply a well delineation of tree rings.
For this, we process two further measurements. How-
ever, having ground truth for the entire dataset is very
challenging. Therefore, we have selected 30 sub-
images for segmentation assessment. These subim-
ages are in core-style, i.e. we select one of the four
directions then from the pith to the outwards (see
Figure 10). Subimages are reoriented in order to al-
ways have the pith on the right. Each subimages has
a height of 128 pixels. The ground truth is shown
in blue while the detected tree rings is in red. Fi-
nally, in green, pixels where the estimation matches
the ground truth are highlighted.
Figure 11 shows the mean Hausdorff distance de-
picted in Equation 4 for these 30 sub-images. The
resulting mean is 1.349 mm, that is close the value of
RMSE previously obtained. It is encouraging for the
future works. Nevertheless, as already mentioned, the
mean tree ring width of the whole image is not nec-
essarily a great indicator of a good detection. For in-
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
858

stance, the image with highest d
hauss
(a value of 6.523
mm) is obtained for the last image in Figure 10 and it
is not the image with the highest mean tree ring width
(a value of 11.988 mm). Results show that introduc-
ing a confidence map is relevant.
5 CONCLUSIONS
A new framework is presented by combining a direc-
tional filter to detect tree rings and a confidence map
to perform measurements on detected tree rings. The
method works on untreated cross-section wood im-
ages. Over the experiments, it achieves a RMSE of
0.830 mm for the (Longuetaud et al., 2022) dataset,
slightly better than a deep learning method of 1.482
mm. We also obtained great results for Urudendro
dataset (Marichal et al., 2023b) with a RMSE of
14.626 pixels. Note that combining the confidence
map and deep learning offers also great results.
In future works, we will include automatic pith de-
tection, cross-section segmentation, other tree species
and other deep learning methods. We will also adapt
our method to other applications where orientation
plays an important role such as fingerprint images.
REFERENCES
Aydin, O. U., Taha, A. A., Hilbert, A., Khalil, A. A., Gali-
novic, I., Fiebach, J. B., Frey, D., and Madai, V. I.
(2021). On the usage of average hausdorff distance
for segmentation performance assessment: hidden er-
ror when used for ranking. European radiology exper-
imental, 5:1–7.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sep-
arable convolution for semantic image segmentation.
In Proceedings of ECCV, pages 801–818.
Conner, W. S., Schowengerdt, R. A., Munro, M., and
Hughes, M. K. (1998). Design of a computer vi-
sion based tree ring dating system. In IEEE South-
west Symposium on Image Analysis and Interpretation
(Cat. No. 98EX165), pages 256–261.
Decelle, R., Ngo, P., Debled-Rennesson, I., Mothe, F., and
Longuetaud, F. (2021). Digital straight segment filter
for geometric description. In International Confer-
ence on Discrete Geometry and Mathematical Mor-
phology, pages 255–268.
Decelle, R., Ngo, P., Debled-Rennesson, I., Mothe, F., and
Longuetaud, F. (2022). Ant colony optimization for
estimating pith position on images of tree log ends.
Image Processing On Line, 12:558–581.
Decelle, R., Ngo, P., Debled-Rennesson, I., Mothe, F., and
Longuetaud, F. (2023). Light u-net with a new mor-
phological attention gate model application to analyse
wood sections. In ICPRAM 2023.
Fabija
´
nska, A. and Danek, M. (2018). Deepdendro–a tree
rings detector based on a deep convolutional neural
network. Computers and electronics in agriculture,
150:353–363.
Gillert, A., Resente, G., Anadon-Rosell, A., Wilmking, M.,
and von Lukas, U. F. (2023). Iterative next bound-
ary detection for instance segmentation of tree rings
in microscopy images of shrub cross sections. In Pro-
ceedings of IEEE CVFPR, pages 14540–14548.
Gonzalez, R. C. (2009). Digital image processing. Pearson
education india.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
IEEE CCVPR, pages 770–778.
Kurdthongmee, W. (2020). A comparative study of the ef-
fectiveness of using popular dnn object detection al-
gorithms for pith detection in cross-sectional images
of parawood. Heliyon, 6(2).
Laggoune, H., Guesdon, V., et al. (2005). Tree ring analy-
sis. In IEEE Canadian Conference on Electrical and
Computer Engineering, pages 1574–1577.
Longuetaud, F., Pot, G., Mothe, F., Barthelemy, A., Decelle,
R., Delconte, F., Ge, X., Guillaume, G., Mancini, T.,
Ravoajanahary, T., et al. (2022). Traceability and qual-
ity assessment of douglas fir (pseudotsuga menziesii
(mirb.) franco) logs: the treetrace douglas database.
Annals of Forest Science, 79(1):1–21.
Makela, K., Ophelders, T., Quigley, M., Munch, E., Chit-
wood, D., and Dowtin, A. (2020). Automatic tree
ring detection using jacobi sets. arXiv preprint
arXiv:2010.08691.
Marichal, H., Passarella, D., Lucas, C., Profumo, L., Casar-
avilla, V., Rocha Galli, M. N., Ambite, S., and Ran-
dall, G. (2023a). UruDendro: An Uruguayan Disk
Wood Database For Image Processing.
Marichal, H., Passarella, D., and Randall, G. (2023b). Cs-
trd: a cross sections tree ring detection method. arXiv
preprint arXiv:2305.10809.
Norell, K. and Borgefors, G. (2008). Estimation of pith po-
sition in untreated log ends in sawmill environments.
Computers and Electronics in Agriculture, 63(2):155–
167.
Pol
´
a
ˇ
cek, M., Arizpe, A., H
¨
uther, P., Weidlich, L., Steindl,
S., and Swarts, K. (2023). Automation of tree-ring de-
tection and measurements using deep learning. Meth-
ods in Ecology and Evolution, 14(9):2233–2242.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., and Fei-Fei, L. (2015).
ImageNet Large Scale Visual Recognition Challenge.
International Journal of Computer Vision (IJCV),
115(3):211–252.
Venkatesh, M. and Seelamantula, C. S. (2015). Directional
bilateral filters. In Proceeding of IEEE ICASSP, pages
1578–1582.
Wimmer, G., Schraml, R., Hofbauer, H., Petutschnigg, A.,
and Uhl, A. (2021). Two-stage cnn-based wood log
recognition. In International Conference on Compu-
tational Science and Its Applications, pages 115–125.
Directional Filter for Tree Ring Detection
859
