
Improving Low-Light Image Recognition Performance
Based on Image-Adaptive Learnable Module
Seitaro Ono
1
, Yuka Ogino
2
, Takahiro Toizumi
2
, Atsushi Ito
2
and Masato Tsukada
1,2
1
University of Tsukuba, Ibaraki, Japan
2
NEC Corporation, Kanagawa, Japan
Keywords: Low-Light Image Enhancement, Image Recognition.
Abstract: In recent years, significant progress has been made in image recognition technology based on deep neural
networks. However, improving recognition performance under low-light conditions remains a significant
challenge. This study addresses the enhancement of recognition model performance in low-light conditions.
We propose an image-adaptive learnable module which apply appropriate image processing on input images
and a hyperparameter predictor to forecast optimal parameters used in the module. Our proposed approach
allows for the enhancement of recognition performance under low-light conditions by easily integrating as a
front-end filter without the need to retrain existing recognition models designed for low-light conditions.
Through experiments, our proposed method demonstrates its contribution to enhancing image recognition
performance under low-light conditions.
1 INTRODUCTION
In recent years, image recognition with deep neural
networks (DNNs) has advanced significantly.
Various recognition models, trained on large datasets,
have emerged and improved steadily in performance.
These models predominantly assume inputs of high-
quality images captured in well-lighting conditions.
The challenge of image recognition still remains in
adapting to various real-world conditions. In practical
applications, environmental factors such as low
lighting, backlighting, adverse weather, and image
sensor noise significantly impact image quality.
These factors degrade the performance of image
recognition.
To overcome these issues, many learning-based
image enhancement methods have been proposed so
far. These methods primarily aim to improve
perceptibility in human vision and do not necessarily
focus on enhancing the performance of recognition
models. In particular, learning-based low-light
image enhancement methods are designed without
considering the subsequent recognition task. These
methods may overly smooth images or accentuate
noise in images, leading to a decline in recognition
performance.
Recently, a method has been proposed to enhance
recognition performance under extremely low-light
conditions. Lee et al. proposed a human pose
estimation model which estimates poses of
individuals in extremely low-light images (Lee et al.,
2023). The pose estimation model is well trained on
images captured in extremely low-light conditions.
The model has significantly contributed to improving
the accuracy of pose estimation. However, we
hypothesize that further enhancement of performance
is achievable by introducing crucial image quality
enhancement for the model.
We propose an image-adaptive learnable module
and a hyper-parameter predictor to optimally process
input images to improve the performance of the later
stage recognition task. The proposed method does not
aim to improve image quality in human perception.
Instead, it focuses on enhancing recognition model
performance through the enrichment of useful
features for the model. We introduce a relatively
straightforward image processing module to correct
low-light images into images that can be easily
recognized by downstream recognition models.
Furthermore, to enhance recognition performance,
we propose a method for predicting appropriate
hyperparameters within the image processing module.
In this paper, we adopt Lee et al.'s pose estimation
as the recognition model and further improve the
Ono, S., Ogino, Y., Toizumi, T., Ito, A. and Tsukada, M.
Improving Low-Light Image Recognition Performance Based on Image-Adaptive Learnable Module.
DOI: 10.5220/0012459700003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 3: VISAPP, pages
721-728
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
721

performance of the model. Through experiments, we
demonstrate that our proposed approach enhances the
recognition performance even with recognition
models trained on low-light images beforehand,
validating its practical effectiveness. This research
introduces a new direction for image recognition in
real-world environments, providing a crucial
foundation for advancing the performance of existing
recognition models.
2 RELATED WORKS
Research on improving the image quality of low-light
images is considered an important challenge in the
fields of computer vision and image processing.
Various techniques have been proposed to enhance
the lightness of low-light images and improve their
overall quality.
In recent years, with the rapid development of
deep learning, correction techniques for low-light
images using Convolutional Neural Networks
(CNNs) have gained attention. These methods can
learn features from low-level image characteristics to
high-level semantic features and improve image
quality in low-light environments. These approaches
not only increase the lightness of an image but also
achieve advanced image restoration, such as color
correction and noise reduction. LLNet (Lore et al.,
2017) employs a deep autoencoder for enhancing
low-light images and noise reduction. It enables end-
to-end training by appropriately adjusting lightness
while preserving the natural appearance of the image.
MSRNet (Shen et al., 2017) learns the mapping
between dark and bright images by using different
Gaussian convolution kernels in an end-to-end
manner. MBLLEN (Lv et al., 2018) utilizes a multi-
branch network to extract rich features at different
levels and ultimately generates the output image
through multi-branch fusion. RetinexNet (Wei et al.,
2018) combines the Retinex theory (Land et al. 1977)
with CNNs to estimate the illumination map of an
image. It improves low-light images by adjusting the
map. KinD (Zhang et al., 2019) is a network based on
the Retinex theory, designed with an additional
Restoration-Net for noise removal. This approach
effectively adjusts the illumination of low-light
images and achieves high-quality image
reconstruction by reducing noise.
These methods are designed to address critical
challenges in low-light image processing, such as
realistic image reconstruction, noise removal, and
management of lightness and contrast. However,
many conventional data-driven methods heavily rely
on large sets of paired data of dark and bright images.
The cost of collecting such paired datasets has
increased, imposing practical constraints.
These conventional methods primarily focus on
improving visibility for human perception, without
considering the subsequent recognition tasks.
Therefore, when applying these methods, there is a
concern that crucial features for recognition tasks
may be lost during image processing. In other words,
there is a concern about whether it is appropriate to
directly apply these methods to recognition tasks.
Thus, it is difficult to strike a balance between
improving the quality of the input image and the
accuracy of the recognition task.
Image-Adaptive YOLO (Liu et al., 2022)
addresses this issue by jointly training an image
processing module along with the subsequent object
detection model. The image processing handles
degraded input images captured under adverse
weather or low-light conditions. This approach strikes
a balance between enhancing input image quality and
improving the accuracy of the object detection model.
It improves object detection accuracy in adverse
weather and low-light conditions.
However, the cooperative learning approach
between the frontend image processing module and
the subsequent recognition model is not necessarily
the optimal solution. As the subsequent recognition
model becomes large-scale, training from scratch
demands a computationally expensive environment
and extensive processing time. In the current situation
where various recognition models are continually
proposed, the situation of incurring high costs and
extensive processing time with each new model
training from scratch is not desirable. There is a
demand for the development of recognition-model-
centric (low-light) image enhancement methods that
offer outstanding efficiency and flexibility,
eliminating the necessity to train the subsequent
recognition model.
Lee et al. (Lee et al., 2023) proposed a method for
estimating the poses of individuals in images captured
under extremely dark lighting conditions. They
developed a camera that can simultaneously capture
dark and well-exposed images of the same scene. By
controlling the intensity of light, the camera can
simultaneously capture both images of a scene under
a dark environment and a bright environment. Their
pose estimation model integrates a model processing
images under low-light conditions with a model
processing corresponding high-exposure images. It
learns representations independent of lighting
conditions and improves individual pose estimation
accuracy under extremely low-light conditions based
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
722

on these representations. Because this method does
not perform image enhancement on the input dark
images, however, it is not possible to check the
consistency of the model's prediction results against
the actual captured images.
3 PROPOSED METHOD
In recognition applications dealing with images or
videos captured in low-light environments, a
significant challenge is the degradation of recognition
accuracy. When a very dark image taken in a low-
light environment is input, it becomes difficult to
distinguish between the subject and the background
because of the low contrast between the subject and
the background. Therefore, in various image
recognition tasks, the extraction of feature values to
identify the subject is hindered. This difficulty in
extracting feature values of the subject impedes
proper identification. Additionally, a contributing
factor to the difficulty of recognition tasks in low-
light environments is the noise originating from
image sensors. In dark images captured in low-light
conditions, high levels of noise occur, obscuring the
fundamental structure of the scene. Differentiating
crucial features values from random noise becomes
challenging, leading to incorrect recognition results.
To overcome this problem, this study proposes a
Low-Light Enhancement (LLE) framework that
adapts input images by recovering exposure and
removing noise, making it easier to extract potential
feature values crucial for downstream recognition
tasks.
As mentioned earlier, Lee et al. proposed a
method for accurately estimating human poses from
images under extremely low-light conditions. In the
method, the pose estimation model learns the
similarity of feature representations between
appropriately exposed images and images captured
under extremely low-light conditions. However, the
method does not actively perform contrast adjustment
or noise reduction, thereby inadequately addressing
the degradation components of low-light images.
Consequently, these aspects may limit the pose
estimation model from fully unleashing its latent
performance.
We introduce the Low-Light Enhancement (LLE)
framework as a front-end module. This framework
explicitly incorporates mechanisms for exposure
recovery, contrast adjustment, and noise reduction.
By doing so, it mitigates challenges posed by low-
light conditions and facilitates the extraction of
crucial features for downstream recognition tasks.
Unlike Image-Adaptive YOLO, our proposed
approach focuses solely on training the LLE part
independently of the downstream recognition model.
This approach allows training only the LLE part
without modifying the pre-trained recognition model,
achieving performance improvement as a front-end
filter. This feature makes it easily applicable to
various existing pre-trained recognition models in
future. The proposed method not only recovers
exposure and removes noise from input images but
also enhances them to facilitate the extraction of
feature values tailored for downstream recognition
tasks. Figure 1 (a) illustrates the framework. The
entire pipeline comprises a differentiable image
processing module consisting of differentiable
multiple image processing operators, a Fully
Convolutional Network (FCN)-based optimal
parameter predictor to predict optimal parameters
(LLE parameters) for image processing operators,
and a recognition model. Initially, an input image is
randomly cropped to a size of 256×256 and fed into
the optimal parameter predictor to predict LLE
parameters for the differentiable image processing
modules. The optimal parameter predictor undergoes
end-to-end training, considering recognition loss to
calculate LLE parameters that maximize the
recognition performance of the recognition model.
The differentiable image processing module applies
the LLE parameters obtained from the optimal
parameter predictor to image processing operators.
The image processing operators process the entire
original image with the LLE parameters and
generates an input image for the recognition model.
3.1 Differentiable Image Processing
Module
To enable gradient-based optimization for the optimal
parameter predictor, all the various image processing
operators used within the differentiable image
processing module need to be differentiable. Our
proposed differentiable image processing module
consists of three differentiable image processing
operators with adjustable hyperparameters: Exposure,
Gamma, and Smoothing (Denoising). Among these,
Exposure and Gamma operators perform pixel-
wise arithmetic operations. The Smoothing
(Denoising) operator is specifically designed to
suppress noise components without losing content
information in the image.
Improving Low-Light Image Recognition Performance Based on Image-Adaptive Learnable Module
723
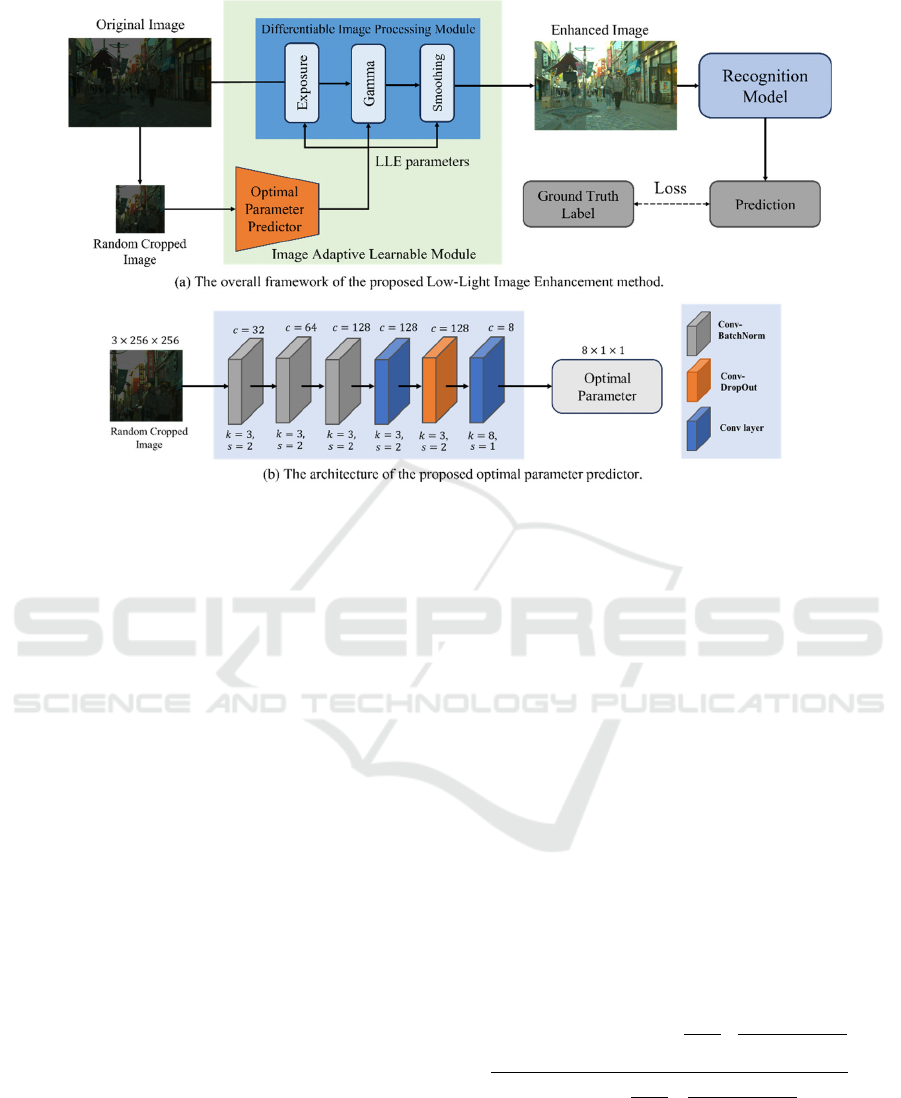
Figure 1: (a) End-to-end training pipeline of the proposed low-light image enhancement method. The optimal parameter
predictor predicts the best parameters (LLE parameters) for the differentiable image processing module from randomly
cropped images. The original images are processed by the differentiable image processing module, enhancing the performance
of the subsequent recognition model. During training, the recognition model does not undergo gradient updates. The
parameter predictor learns to minimize task-specific losses between the predictions of the recognition model and ground truth
data. (b) Configuration of the proposed parameter predictor. The predictor is a Fully Convolutional Network (FCN) consisting
of six convolutional layers. "k", "s" and "c" respectively denote the kernel size, the stride and the number of output channels
for each convolutional layer.
3.1.1 Exposure Operator
This operator adjusts the overall lightness of the
entire image by raising or lowering the exposure level,
effectively controlling the overall lightness. For an
input pixel value 𝑃
=(𝑟
,𝑔
,𝑏
) and an output pixel
𝑃
=(𝑟
,𝑔
,𝑏
), the operator performs the following
mapping:
𝑃
=𝑎𝑃
, (1)
where, 𝑎 is the parameter predicted by the parameter
predictor.
3.1.2 Gamma Operator
The Gamma operator alters the contrast of the image,
emphasizing or de-emphasizing specific details by
changing the gamma value. For an input pixel value
𝑃
=(𝑟
,𝑔
,𝑏
) and an output pixel 𝑃
=(𝑟
,𝑔
,𝑏
) ,
the operator performs the following mapping:
𝑃
=𝑃
, (2)
where, 𝛾 is the parameter predicted by the parameter
predictor. The operations in the Exposure operator
and Gamma operator involve simple multiplication
and exponentiation, making them differentiable.
3.1.3 Smoothing Operator
The Smoothing operator smoothens the input image
while preserving edge information crucial for the
recognition model. To achieve this, we adopted a
bilateral filter (Tomasi et al., 1998). For an 1-channel
image with 𝐼𝐽 pixels, let 𝑓
(
𝑖,𝑗
)
represent input
pixel value at spatial coordinates
(
𝑖,𝑗
)
, if we apply the
bilateral filter to
𝑓
(
𝑖,𝑗
)
,
resulting in the output
pixel value 𝑔
(
𝑖,𝑗
)
, it can be expressed as follows:
𝒈
(
𝒊,
𝒋
)
=
𝒇
(
𝒊+𝒎,𝒋+𝒏
)
𝒆
𝒎
𝟐
𝒏
𝟐
𝟐𝝈
𝟏
𝟐
𝒆
𝒇
(
𝒊,𝒋
)
𝒇
(
𝒊𝒎,𝒋𝒏
)
𝟐
𝟐𝝈
𝟐
𝟐
𝒘
𝒎𝒘
𝒘
𝒏𝒘
𝒆
𝒎
𝟐
𝒏
𝟐
𝟐𝝈
𝟏
𝟐
𝒘
𝒎𝒘
𝒆
𝒇
(
𝒊,𝒋
)
𝒇
(
𝒊𝒎,𝒋𝒏
)
𝟐
𝟐𝝈
𝟐
𝟐
𝒘
𝒏𝒘
,
(3)
where, 𝜎
and 𝜎
are parameters provided by the
parameter predictor, and 𝑊 is the window size. 𝜎
adjusts the influence of the distance between
coordinates (𝑖,𝑗) and (𝑖+𝑚,𝑗+𝑛), with a larger 𝜎
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
724

reducing the impact of pixels that are farther away.
𝜎
adjusts the influence of the difference between
𝑓(𝑖,𝑗) and 𝑓
(
𝑖+𝑚,𝑗+𝑛
)
, with a larger 𝜎
reducing the impact of pixels with a larger difference
in values. We apply this operator independently to the
three channels of RGB.
3.2 Optimal Parameter Predictor
In the camera's Image Signal Processing (ISP)
pipeline, various image processing operators are
performed to obtain images with high visibility for
human perception. The correction parameters for
each of image processing operators are traditionally
determined empirically by experienced technicians.
(Mosleh et al., 2020). The tuning process to obtain
correction parameters suitable for a diverse range of
images incurs substantial costs. Moreover, in this
study, the objective is not to improve human
perceptibility but to seek correction parameters that
maximize the recognition performance of the
downstream recognition model.
To address this issue, we employ an efficient
small Fully Convolutional Network (FCN) as the
parameter predictor to estimate LLE parameters for
each input image. The purpose of the optimal
parameter predictor is to understand aspects such as
the exposure level and noise level in the input image
and predict the LLE parameters for the image
processing operators that maximize the recognition
performance of the downstream recognition. Since
FCNs consume considerable computational resources
when processing high-resolution images, the LLE
parameters are learned for randomly cropped images
of 256 pixels × 256 pixels from the input image.
In real-world environmental scenes, illumination
intensity is not necessarily constant, and the exposure
level and noise level are not globally constant.
However, for the sake of computational efficiency,
we prioritize the benefit of significantly reducing
computational costs and use randomly cropped
images as inputs to the optimal parameter predictor.
During training, the optimal parameter predictor
references the recognition loss derived from the
recognition results of the downstream recognition
model and learns to maximize recognition accuracy.
As mentioned in the introduction, we adopt
single-person pose estimation by Lee et al. as the
recognition task. Therefore, we utilize the pose
estimation loss widely used in pose estimation tasks
as the loss function. The pose estimation loss is
represented by the following formula:
𝐿𝑜𝑠𝑠 =
1
𝐾
‖
𝑃
−𝑋
‖
, (4)
where 𝑃
and 𝑋
represent the predicted heatmap and
ground truth heatmap of the 𝑖 -th pose estimation
model, respectively, and 𝐾 denotes the number of
keypoints.
As shown in Figure 1 (b), the optimal parameter
predictor consists of 6 convolutional layers. Except for
the 4th, 5th and 6th layers, each convolutional layer is
followed by a Batch Normalization layer, which
normalizes the distribution of input data, suppresses
data variability caused by changes in lighting
conditions, and enables the model to make consistent
predictions. Batch Normalization also stabilizes the
distribution of gradients, promoting the convergence of
training. A Dropout layer is applied after the 5th
convolutional layer. The final layer outputs the
hyperparameters for the differentiable image
processing module. The parameter predictor has only
455k parameters, given a total of 8 hyperparameters for
the differentiable image processing module.
4 EXPERIMENTS
We evaluated the performance of our method for
images captured in low-light environments.
Additionally, we conducted two ablation studies to
investigate the performance of each proposed
differentiable image processing module and the
impact of the order of the image processing operators.
4.1 Implementation Details
In this experiment, we adopt the pose estimation model
proposed by Lee et al. as the recognition model. This
model is pre-trained on the low-light image dataset for
pose estimation, known as the ExLPose dataset (Lee et
al., 2023). The combination of image processing
operators used in our differentiable image processing
module is [Exposure, Gamma, Smoothing]. The
optimal parameter predictor is trained to maximize the
performance of Lee's pose estimation model. During
the training, parameters of the pose estimation model
are fixed. Only gradients of the pose estimation model
are back propagated from loss function to update
trainable parameters of the optimal parameter predictor.
The optimal parameter predictor uses the Adam
Optimizer with a learning rate set to 1e-4 and is trained
for 10 epochs with a batch size of 8. We conducted the
experiment using PyTorch and executed it on a GTX
1080Ti GPU.
Improving Low-Light Image Recognition Performance Based on Image-Adaptive Learnable Module
725

Figure 2: Qualitative evaluation results. The first row represents the input low-light image, the second row shows the image
whose lightness values have been shifted to an average of 0.4 using Lee's method, the third row displays the image processed
by our proposed method, and the fourth row contains the corresponding bright images paired with the input low-light images.
Our proposed method effectively controls exposure and contrast in a manner that is easily understandable for the recognition
model, resulting in the recovery of recognition accuracy.
4.2 Dataset
In this experiment, we used ExLPose dataset (Lee et
al. 2023). ExLPose dataset is designed for human
poses estimation. It has paired extremely low-light
(LL) and well-exposed images captured at the same
scene with the same optical axis. The light intensities
of the LL images are reduced to 1/100 from those of
well-exposed images by using ND filters in their
camera. This dataset contains LL images, their paired
well-exposed images, and the ground truth human
pose labels, comprising 2065 training data pairs and
491 test data pairs. In this study, we used only the LL
images for both training and testing.
Table 1: Evaluation result on ExLPose Dataset. Our
proposed method improves accuracy by performing
adaptive image processing on the input image.
AP@0.5-0.95 ↑
Model LL-N LL-H LL-E LL-A
Lee et al., 2023 42.1 33.8 18.0 32.4
Ours +
Lee et al., 2023
42.6 34.1 20.0 33.2
4.3 Evaluation Protocol
In this experiment, we follow the same evaluation
method as Lee et al. Since we adopt single-person
pose estimation as the recognition task, we assume
that true bounding boxes are provided for each person
in the image. The evaluation metric used is the
Standard Average Precision (AP) score based on the
detected Object's Keypoint Similarity (OKS), widely
used in pose estimation tasks. The low-light test
images are divided into subsets based on their
Table 2: Ablation analysis on the Differentiable Image
Processing Module. E, G, and S stand for Exposure,
Gamma, and Smoothing operators, respectively.
AP@0.5-0.95 ↑
Operator LL-N LL-H LL-E LL-A
E, G 40.5 32.3 18.0 31.5
E, S 37.3 31.6 19.1 30.0
G, S 20.2 8.0 1.1 10.3
E, G, S 42.6 34.1 20.0 33.2
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
726
respective mean lightness: LL-Normal (LL-N), LL-
Hard (LL-H), and LL-Extreme (LL-E). The mean
pixel intensity of LL-N, LL-H, and LL-E images are
3.2, 1.4, and 0.9, respectively, indicating that all of
them can be classified as extremely dark images. The
union of all three low-light subsets is denoted as LL-
All (LL-A).
4.4 Experimental Results
The optimal parameter predictor receives randomly
cropped images as input, causing variability in the
recognition model's predictions for each evaluation.
In this experiment, we conducted three evaluations
for each of the four subsets of the ExLPose dataset
(LL-N, LL-H, LL-E, LL-A), reporting the average
values to account for this variability. In this
experiment, we compared the accuracy of human
pose estimation when our proposed method was
applied and when it was not applied to Lee's pose
estimation model. The comparison results of the pose
estimation accuracy are shown in Table 1. Applying
our proposed method to Lee's pose estimation model
led to improved pose estimation accuracy in all
subsets. Specifically, there was an improvement of
1.2% (0.5 points) in LL-N, 1.0% (0.3 points) in LL-
H, 11.1% (2.0 points) in LL-E, and 2.5% (0.8 points)
in LL-A. These results demonstrate that the proposed
method can enhance significant performance
improvement observed in the extremely low-light
condition of LL-E. Based on these experimental
results, the performance of the proposed method has
been confirmed. Figure 2 shows qualitative
evaluation results. Comparing the results of applying
Lee et al.'s proposed input data normalization method
in the second row to the application of our proposed
method to the images in the third row, it is evident
Table 3: Evaluation results when changing the order of the
three operators. The best results were obtained when the
order was E (Exposure), G (Gamma), S (Smoothing).
AP@0.5-0.95 ↑
Operator LL-N LL-H LL-E LL-A
S, E, G 36.9 29.6 15.7 28.4
S, G, E 6.4 8.9 3.1 6.1
G, E, S 9.6 10.7 4.5 8.5
G, S, E 8.0 9.8 2.7 6.9
E, S, G 40.5 32.3 17.9 31.5
E, G, S 42.6 34.1 20.0 33.2
that our proposed method in the third row is much
closer to the ground truth in the fourth row. This
demonstrates the performance of our proposed
approach in performing optimal image processing
based on the characteristics of the pretrained
recognition model in the subsequent stage.
4.5 Ablation Study
To validate the performance of each operator in the
differentiable image processing module, we
evaluated combination of the three image processing
operators using four subsets of the ExLPose test
dataset (LL-N, LL-H, LL-E, LL-A). Table 2 shows
evaluation results of the combination of two
operators. For each combination, we trained the
optimal parameter predictor with the same training
settings. We additionally show the result of three
operators (E, G, S). The result of the three image
processing operators yielded the best performance,
demonstrating the effectiveness of these operators.
Furthermore, we investigated the performance of
the order of the proposed three image processing
operators. We swapped the order of three proposed
image processing operators, trained the optimal
parameter predictor with the same training settings.
Table 3 shows the results of the performance of all the
orderings. The results revealed that in the order of
[Exposure, Gamma, Smoothing] is crucial for higher
performance of the pose estimation task. Adjusting
exposure spreads pixel values in low-light regions
linearly. It expands the overall range of pixel values
and enhances details and features. Subsequent gamma
adjustment makes natural and uniform lightness
distribution. It can extract detailed information from
low-light images. On the other hand, the ordering that
switches Exposure operator and Gamma operator
significantly decreases the recognition performance.
The inverse order makes nonlinear transformations to
information biased towards low-light regions. It
potentially destroys structural information in the
image. It also makes it difficult to extract features for
Table 4: Results of the accuracy comparison when
performing image processing based on the optimal
parameters obtained through grid search for each test data
image.
AP@0.5-0.95 ↑
Model LL-N LL-H LL-E LL-A
Lee et al., 2023 42.1 33.8 18.0 32.4
Ours +
Lee et al., 2023
51.5 41.4 27.0 40.9
Improving Low-Light Image Recognition Performance Based on Image-Adaptive Learnable Module
727

recognition tasks and leads to a degradation in
recognition performance.
4.6 Discussion
Our approach improves accuracy without retraining
the recognition model by incorporating exposure
recovery and noise reduction into the image
processing pipeline. This suggests that by applying
our proposed method, it became possible to retrieve
the overlooked features in Lee et al.'s pose estimation.
To explore the potential performance of our proposed
method, we conducted a grid search on the entire test
data of ExLPose. In this process, we searched for
optimal parameters for each input image and
processed the input images in the differentiable image
processing module. The processed images were then
input into Lee et al.'s recognition model. The results
are presented in Table 4. As evident from the results
of the preliminary experiment, the pose estimation
accuracy significantly improved across all subsets.
This suggests the potential to further enhance the
performance of the proposed method. The refinement
of the training method for the optimal parameter
predictor will be a future task.
5 CONCLUSIONS
We proposed an image-adaptive learnable module
that improves recognition performance in low-light
environments without retraining the pretrained
recognition model for pose estimation. Our proposed
method consists of a differentiable image processing
module and an optimal parameter predictor. The
Differentiable image processing module restores the
exposure and remove noise from low-light images to
recover the latent content of the images. The optimal
parameter predictor predicts the optimal
hyperparameters used in the modules by using a small
FCN. The entire framework was trained end-to-end,
and the optimal parameter predictor learned to predict
appropriate hyperparameters by referring only to the
loss of the subsequent pose estimation task in this
paper. The experimental results demonstrated that our
approach achieved a maximum recovery of up to
11.1% in the accuracy of pretrained pose estimation
models across different levels of low-light image data.
REFERENCES
Land, E. H. (1977). The retinex theory of color vision.
Scientific American, 237(6), 108-129.
Lore, K. G., Akintayo, A., & Sarkar, S. (2017). LLNet: A
deep autoencoder approach to natural low-light image
enhancement. Pattern Recognition, 61, 650-662.
Shen, L., Yue, Z., Feng, F., Chen, Q., Liu, S., & Ma, J.
(2017). Msr-net: Low-light image enhancement using
deep convolutional network. arXiv preprint
arXiv:1711.02488.
Lv, F., Lu, F., Wu, J., & Lim, C. (2018, September).
MBLLEN: Low-Light Image/Video Enhancement
Using CNNs. In BMVC (Vol. 220, No. 1, p. 4).
Wei, C., Wang, W., Yang, W., & Liu, J. (2018). Deep
retinex decomposition for low-light enhancement.
arXiv preprint arXiv:1808.04560.
Zhang, Y., Zhang, J., & Guo, X. (2019, October). Kindling
the darkness: A practical low-light image enhancer. In
Proceedings of the 27th ACM international conference
on multimedia (pp. 1632-1640).
Lee, S., Rim, J., Jeong, B., Kim, G., Woo, B., Lee, H., ... &
Kwak, S. (2023). Human pose estimation in extremely
low-light conditions. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern
Recognition (pp. 704-714).
Tomasi, C., & Manduchi, R. (1998, January). Bilateral
filtering for gray and color images. In Sixth
international conference on computer vision (IEEE Cat.
No. 98CH36271) (pp. 839-846). IEEE.
Liu, W., Ren, G., Yu, R., Guo, S., Zhu, J., & Zhang, L.
(2022, June). Image-adaptive YOLO for object
detection in adverse weather conditions. In Proceedings
of the AAAI Conference on Artificial Intelligence (Vol.
36, No. 2, pp. 1792-1800).
Mosleh, A., Sharma, A., Onzon, E., Mannan, F., Robidoux,
N., & Heide, F. (2020). Hardware-in-the-loop end-to-
end optimization of camera image processing pipelines.
In Proceedings of the IEEE/CVF Conference on
computer Vision and Pattern Recognition (pp. 7529-
7538).
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
728
