
Swap-Deep Neural Network: Incremental Inference and Learning for
Embedded Systems
Taihei Asai and Koichiro Yamauchi
a
Institute of Computer Science, Chubu University, Matsumoto-cho 1200, Kasugai, Aichi, Japan
Keywords:
Hidden Neural Network, Incremental Learning, Continual Learning, Deep Neural Networks.
Abstract:
We propose a new architecture called “swap-deep neural network” that enables the learning and inference
of large-scale artificial neural networks on edge devices with low power consumption and computational
complexity. The proposed method is based on finding and integrating subnetworks from randomly initial-
ized networks for each incremental learning phase. We demonstrate that our method achieves a performance
equivalent to that of conventional deep neural networks for a variety of various classification tasks.
1 INTRODUCTION
One reason for the rapid development of artificial in-
telligence in recent years is the establishment of learn-
ing methods for large-scale neural networks. In sev-
eral cases, the neural network connections that are es-
sential for realizing a complex task do not need to
be considerably large. However, large-scale neural
networks are typically required to achieve success-
ful learning. This is because the probability of the
initial state of the connections required for the task
to be included in the randomly initialized neural net-
work does not increase unless the scale is large. In
other words, to successfully achieve both learning and
recognition, it is desirable for the neural network to be
as large as possible.
However, to practically realize such learning and
inference, it is necessary to implement them on edge
devices. Many existing edge devices are connected
to cloud servers via the Internet and their heavy com-
putational tasks are performed by the cloud servers.
Particularly, they request the cloud server to perform
the learning process and transfer back the resulting
weight parameters. However, this system faces the
risk of privacy leakage associated with network con-
nections.
One way to solve this problem is to compress the
large neural network to a small one. For example,
some methods are the neural architecture selection
(NAS) (e.g. (Sadel et al., 2023)), pruning useless con-
nections by using the regularization term(Ishikawa,
a
https://orcid.org/0000-0003-1477-0391
1996) and distillation techniques(Hinton et al., 2015).
These methods require all required samples to be pre-
pared in advance. Moreover, in the case of the NAS,
the system has to prepare several solution-candidates
to find a better solution. These conditions are too
hard to manage the system on-site, where the system
has to incrementally learn new novel samples with a
bounded memory space.
In this study, we propose a novel method to solve
this problem. In particular, we propose a method for
realizing both learning and inference on edge devices
without connecting them to cloud servers. However,
we assume a situation in which the size of the neural
network required to learn and recognize a task that the
user faces exceeds the capacity of the edge device. In
this case, the proposed method divides the task into
multiple subtasks and trains each subtask on a sepa-
rate network on the edge device. The parameters real-
ized in this manner are stored on a secondary storage
device; during inference, the parameters are read in
sequence and inferred, and the results are ensembled.
However, this increases the power consumption ow-
ing to data transfer. Therefore, we infer subtasks in
a manner similar to that of a hidden neural network
(Ramanujan et al., 2020), using randomly initialized
neural networks. In other words, we identify and re-
tain only a few important weight connections that are
necessary for inferring the subtask and store their po-
sition information on a secondary storage device. We
expect that the power and time consumed during read-
ing will be reduced.
In this paper, we present the theoretical analysis of
power consumption and a simulation result. The re-
418
Asai, T. and Yamauchi, K.
Swap-Deep Neural Network: Incremental Inference and Learning for Embedded Systems.
DOI: 10.5220/0012465500003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 418-427
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

mainder of this paper is organized as follows. Section
2 describes related work. Section 3 presents a review
of hidden neural networks. Section 4 describes the
proposed incremental learning method. Section 5 an-
alyze the power-consumption of the proposed learn-
ing method. Section 6 presents the experimental re-
sults and Section 7 discusses the computational com-
plexity and suitable learning strategy of the proposed
system. Finally Section 8 concludes the paper.
2 RELATED WORKS
The learning of dividing a task into multiple subtasks
and learning them individually can be considered in-
cremental learning (continual learning). At the same
time, this method of learning a task as multiple sub-
tasks and integrating them is also known as ensemble
learning, particularly boosting method. Furthermore,
there are several techniques for reducing power con-
sumption and increasing processing efficiency when
implemented on edge devices. In this section, we
compare the differences between existing methods
and the proposed method.
2.1 Comparison with Boosting Methods
A classical boosting method, Adaboost (Freund and
Schapire, 1997), fixes weights by learning with weak
learners. A weak learner increases the weight of the
incorrect learning sample, decreases the weight of the
correct learning sample, and then learns with the next
weak learner. Using the set of weak learners created
in this manner, unknown inputs are inferred in par-
allel. The average of the answers obtained in this
manner is weighted and the final output is obtained,
resulting in a higher recognition rate than that of indi-
vidual weak learners. This method is not suitable for
learning in a completely divided data form as done in
the proposed method, because it uses the same dataset
for all subnetworks (weak learners). In contrast, Fos-
ter (Feature boosting) (Wang et al., 2022) assumes
that different domain learning samples are added to
learn instead of the same domain learning samples as
Adaboost. Therefore, this method is similar to the
proposed method and we incorporate Foster’s concept
into the proposed method. However, Foster adopted a
form of parallel computation that maintained the pa-
rameters of each subnetwork, which was not suitable
for low-power computation on edge devices, as as-
sumed in the proposed method.
In our method, we adopt a method of apply the
connection position information used in each subnet-
work to a network initialized randomly in each sub-
network by incorporating a hidden neural network
(Ramanujan et al., 2020) method, which is suitable
for cases in which all subnetworks share and use small
edge-device resources.
2.2 Comparison with Existing
Incremental Learning Methods
When new domain data are learned using an exist-
ing neural network, Catastrophic Forgetting (French,
1999) occurs. There are two main methods to prevent
this problem. One is to learn new domain samples to-
gether with old domain samples (e.g. (French, 1997),
(Yamauchi et al., 1999), (Hsu et al., 2018), (Hayes
et al., 2019)). These methods have the advantage that
once learned, past memories are not only prevented
from catastrophic forgetting but also reset by relearn-
ing. Our proposed method adopts a similar approach
in that it uses past data to set the parameters. How-
ever, networks that have been learned in the past by
fixing their parameters are not relearned. The advan-
tage of this method is that it reduces the number of
computations required. The second method is to fix
few weight parameters ((Rusu et al., 2016), (Kirk-
patrick et al., 2017) (Zenke et al., 2017) (Mallya and
Lazebnik, 2018) (Wang et al., 2022)) to ensure that
what has been learned in the past is preserved. Our
proposed method is similar to these methods in that
it fixes the parameters learned in the past. However,
in principle, only the model proposed by Wang et al.
(Wang et al., 2022) can sequentially load and calcu-
late these fixed parameters in order and calculate the
final output. However, as mentioned previously, no
model among them considers the implementation on
edge devices.
2.3 Comparison with Neuromorphic
Computing
Neuromorphic computing is a general term for mod-
els that can efficiently compute neural networks by
providing hardware specialized for neural network
computation (Zheng and Mazumder, 2020). In con-
trast, the proposed method does not use a neuromor-
phic model. This is merely a proposal on operating
hardware with limited computing resources. How-
ever, more efficient operations can be achieved by
executing individual neural networks in the neuro-
morphic models. Hirose et al. (Hirose et al., 2022)
proposed a novel hardware neural network that re-
duced power consumption by introducing a hidden
neural network architecture (Ramanujan et al., 2020).
We also introduce the same aspects as (Hirose et al.,
2022) to reduce power consumption. The difference
Swap-Deep Neural Network: Incremental Inference and Learning for Embedded Systems
419

between the proposed method and the model pro-
posed by (Hirose et al., 2022) is that the proposed
method supports incremental learning in large- scale
tasks.
2.4 Contribution of Our Proposed
Method
Our method virtually realizes a large-scale neural net-
work on hardware with limited computing resources,
while inheriting the ideas of the abovementioned ex-
isting methods. The differences between our method
and other methods are summarized in Table 1.
3 REVIEW OF HIDDEN NEURAL
NETWORK
Before describing the proposed method, this section
reviews the hidden neural network used in the pro-
posed method, as explained in Section . Ramanujan
et al. (Ramanujan et al., 2020) found that randomly
initialized neural networks include a subnetwork suit-
able for solving a specified task. They also presented
an effective method for finding a subnetwork using a
gradient descent method. Although this network uses
the gradient descent method, it does not modify the
weight parameters but finds the subnetwork.
3.1 Subnetwork
The subnetwork of a fully connected neural network
is described as follows (Ramanujan et al., 2020). The
l-th layer of a fully connected neuron consists of n
l
nodes V
(l)
= {v
(l)
1
,v
(l)
2
,··· ,v
(l)
n
l
}. The subnetwork
found via gradient descent is described by G(V , E).
The node v ∈ V output is denoted as
Z
v
= σ(I
v
) (1)
where σ() is the ReLU (Krizhevsky et al., 2012) and
I
v
is given as
I
v
=
∑
(u,v)∈E
w
uv
Z
u
(2)
To find a good sub-network, a score s
uv
for each
weight is introduced. The top k-percent of the ab-
solute values of the scores are selected as the subnet-
work. Therefore, (2) can be written as
I
v
=
∑
u∈V
(l−1)
w
uv
Z
u
h(s
uv
), (3)
where h(s
uv
) = 1 if |s
uv
| is included in the top k
scores. In the case of the convolution layer, the scor-
ing method is almost the same as that of the fully con-
nected layer, except that the nodes are replaced with
channels.
3.2 Find a Good Sub-Network
(EDGE-POPUP)
Although the weight parameter values are fixed at ran-
dom values, the score values s
uv
are optimized using
a gradient descent algorithm as follows:
s
uv
= s
uv
−η
∂L
∂s
uv
, (4)
where L denotes the loss function. Note that we have
to rewrite (3) to
I
v
=
∑
u∈V
(l−1)
w
uv
Z
u
|s
uv
| (5)
to calculate the gradient in (4)
1
.
The above equation omits the momentum and
weight decay terms. Moreover, the change in the
learning rate η is also ignored. These omitted terms
should be added according to the optimization method
used.
4 SWAP-DEEP NEURAL
NETWORK
The proposed learning system:Swap-deep neural net-
work (Swap-NN) consists of two parts: a convectional
neural network (CNN) and a secondary-storage (see
Fig 1). The CNN parameters are randomly initialized
and fixed. Instead, CNN adaptation is achieved by
identifying the important connections found using (2)
and (4). The indices of the top k-scored connections
are stored in the secondary-storage.
We assume that the proposed learning system is
suitable for classification tasks. Learning samples are
divided into several groups based on their labels. For
example, consider the case of dividing the MNIST
dataset into two groups. To realize this, the sam-
ples are divided for every five labels: {0,1,2,3,4},
{5,6,7,8,9}. In this case, the learning system gener-
ates two subnetworks to learn the datasets. Therefore,
1
The ’simple minist example’ presented by the authors
https://github.com/allenai/hidden-networks/ , L is cal-
culated by using (3). However, the backward calculation
for the L is executed by (5). This means that the learning
method is slightly different from (4). However, we found
that the convergence speed of the simple sample code is
faster than the code which derives L by (5). So, we have
developed our code based on the ’simple mnist example’.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
420
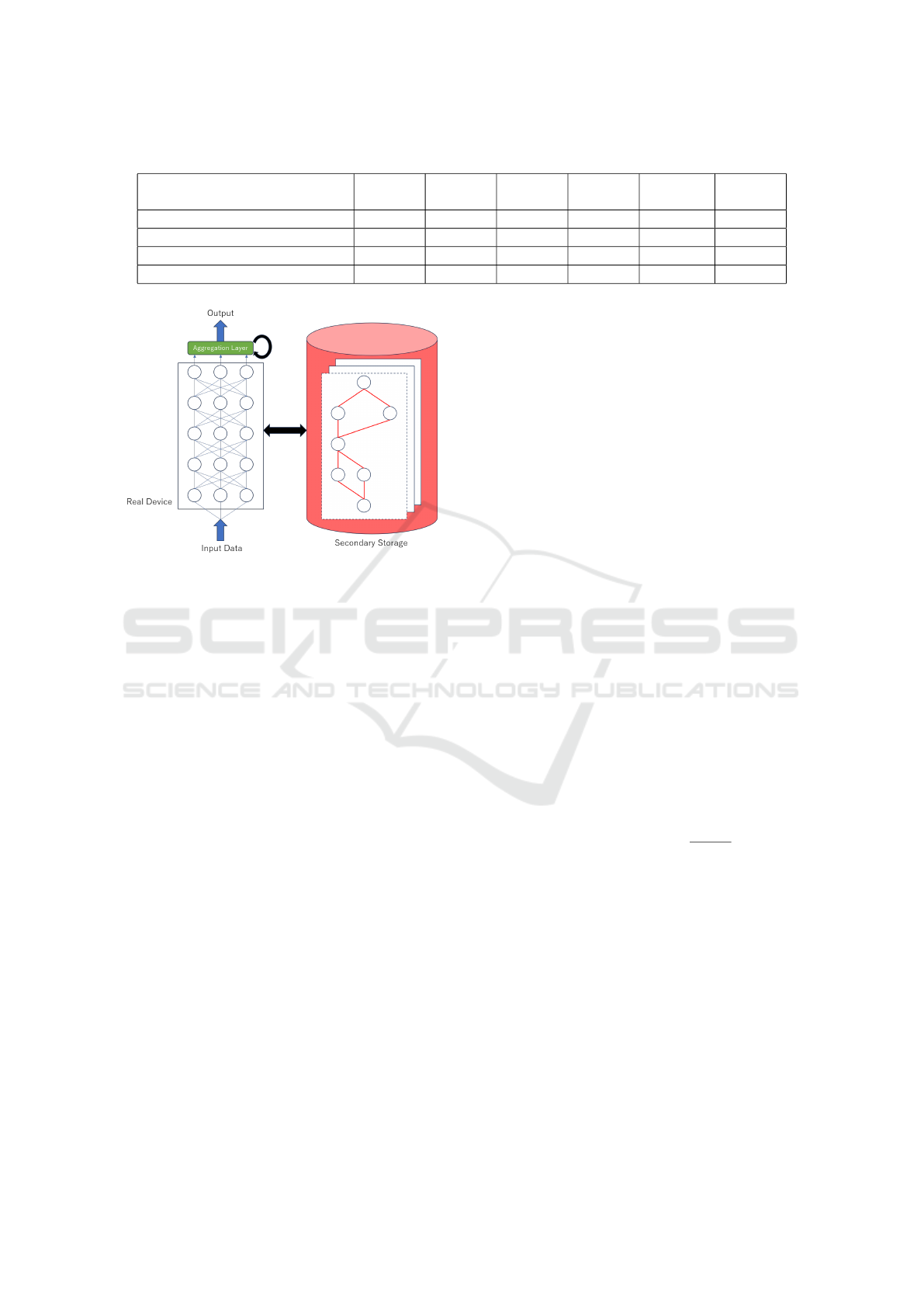
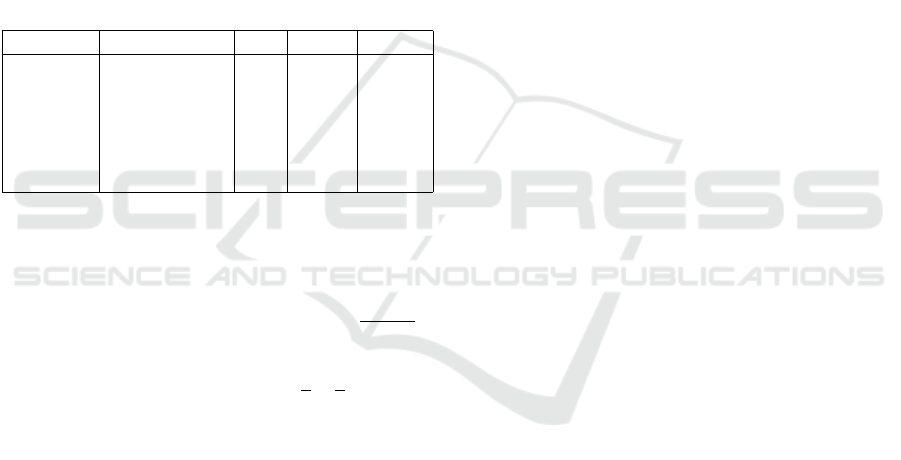
Table 1: Comparison with the other similar methods.
SwapNN
(ours)
Foster Feature
boost
Hidden
NN
Na
¨
ıve re-
hearsal
PackNet
Learning of large-scale dataset ⃝ ⃝ ⃝ ⃝ ⃝ ⃝
Incremental Learning ⃝ ⃝ × × ⃝ ⃝
Execution on a small device ⃝ × × ⃝ × ×
Low-power consumption ⃝ × × ⃝ × ×
Figure 1: System structure: CNN with aggregation
layer(left), and secondary storage(right).
the first subetwork learns the dataset whose labels are
{0,1,2,3,4} using (4). After learning, the most im-
portant k-connection indices and corressponding full-
connection(FC) layer parameters are stored in the sec-
ondary storage. Similarly, the second subnetwork
learns the datasets which have labels of {5,6,7,8,9}
together with a part of the first dataset, in the same
manner as the first subnetwork, and stores a k impor-
tant connection index and FC layer parameter. Dur-
ing the inference phase, an unknown input is assigned
to the input layer of the CNN. The system loads the
first subnetwork connection indices and FC-layer pa-
rameters from the secondary storage and calculates
them. The output is sent to the aggregation layer,
which consists of the FC layers used by Foster (Wang
et al., 2022). The FC layers are also adjusted for opti-
mal mixing of all subnetwork outputs. This algorithm
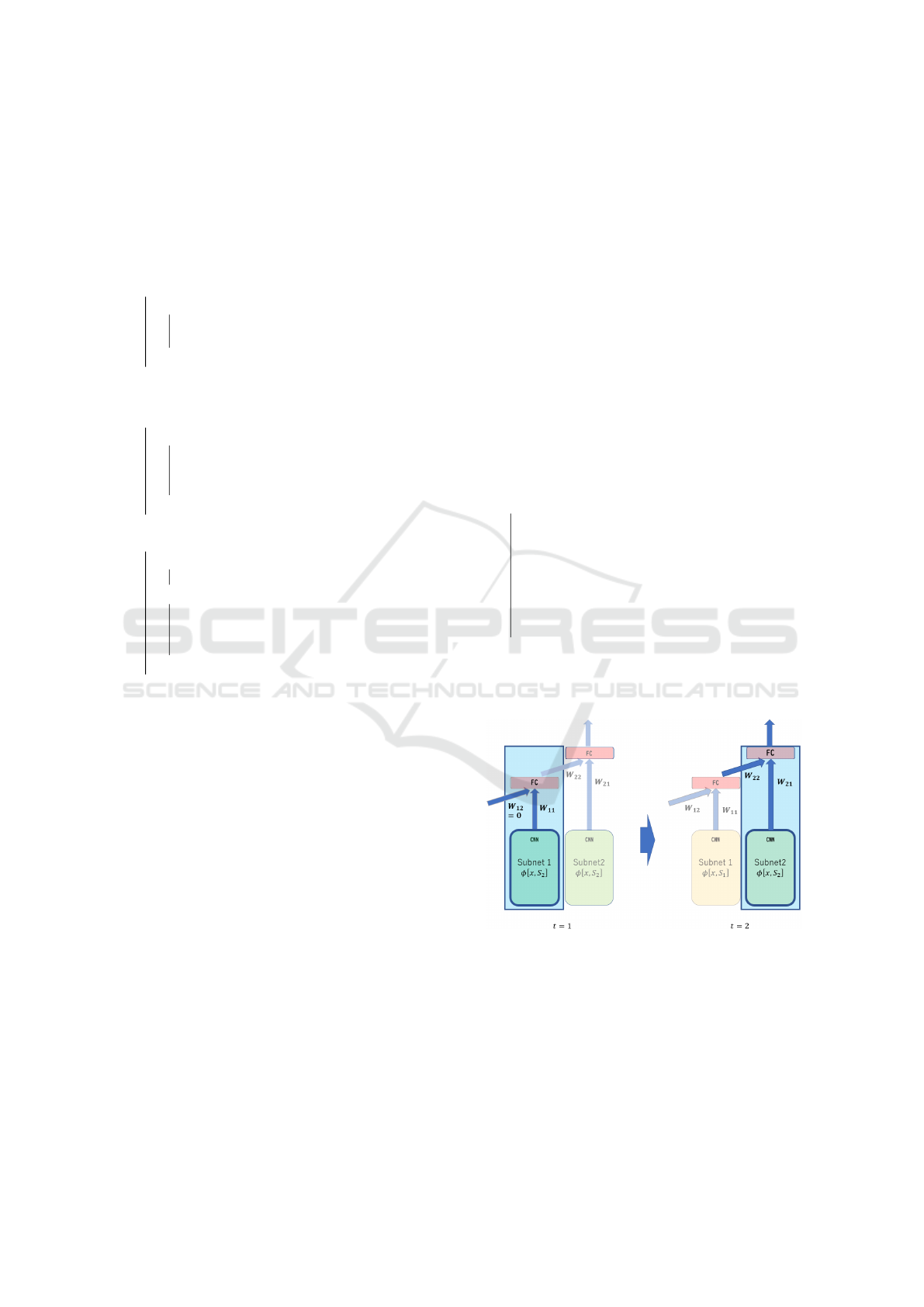
is explained in Section 4.2. The second subnetwork
connection information is also loaded from the sec-
ondary storage, and CNN output is calculated. The
output is sent to the FC layers and the two sets of
outputs are aggregated (see Fig 2). The aggregated
output is the final output of the system. Therefore, the
proposed network executes inferences sequentially by
swapping the current connection with next subnet-
work connection one by one (see Algorithm 2).
4.1 Problem Formulation
We assume that incremental learning is performed
when a novel sample set is presented. Let χ
t
≡
{(x
(t)
p
,y
(t)
p
)}
n
t
p=1
be the novel sample set at t, where
t = 1,2,··· ,T . The learning system learns χ
t
at the t-
th incremental learning phase by referring old sample
sets stored in χ
old
, where |χ
old
| ≤ B. The old sam-
ples are needed for the learner to obtain better class-
boundaries. To store current data into |χ
old
|, an ele-
ment in χ
old
is randomly selected to be disposed such
that the condition |χ
old
| ≤ B holds (see Algorithm 1).
After each incremental learning phase, the learn-
ing system is evaluated by using test datasets,
which include all classes included in χ
t
, where t =
1,2,··· ,T . To prevent catastrophic forgetting, the
past scores s
uv
at t = 1, ··· ,t −1 are not modified dur-
ing the later learning phases.
4.2 Incremental Learning by Adding
Sub-Networks
During the t-th incremental learning phase, the t-th
sub-network S
(t)
learns (x
(t)
p
,y
(t)
p
) ∈ χ
t
∪ χ
old
from
scratch. Let ∆s
(t)
uv
be the change in the score for w
uv
.
∆s
(t)
uv
derived by the steepest gradient descent with a
momentum term. Therefore,
∆s
(t)
uv
= 0.9∆s
(t−1)
uv
−η
∂L
∂s
(t−1)
uv
, (6)
where L denotes the cross-entropy loss, s
(t)
uv
denotes
the score of the w
uv
at t, η denotes the learning speed
and η < 1. s
(t)
uv
is modified as
s
(t)
uv
= s
(t−1)
uv
+ ∆s
(t)
uv
. (7)
Note that the learning of samples in χ
t
∪χ
old
makes
the sub-network acquire correct classification bound-
aries between the target class and the other classes.
After learning, the fully-connected aggregation layer
in the subnetwork is stored as the connection set for
the k maximum scores.
S
t
= {(u,v)|h(s
(t)
uv
) = 1}, (8)
Swap-Deep Neural Network: Incremental Inference and Learning for Embedded Systems
421
where the function h(·) is the same function used in
(3). The summarized algorithm is shown in 1. After
the learning S
t
is stored in the 2nd storage.
Data: χ
t
,χ
old
Result: S
t
,χ
old
Initialize s
(0)
uv
for i = 1 to NumE poch do
for (x,y) in χ
t
∪χ
old
do
Calculate L by using S
t
.
Score Update by (6), (7).
end
end
S
t
= {(u,v)|h(s
(t)
uv
) = 1}
for i = 1 to NumE poch do
for (x,y) in χ
t
∪χ
old
do
Calculate L
aggregation
by using all
subnetworks.
modify aggregation layer by (11)(12).
end
end
for (x,y) in χ
t
do
if |χ
old
| < B then
χ
old
= χ
old
∪{(x,y)}
else
p ∼ |χ
old
|U(0, 1)
χ
old
= χ
old
\{(x
p
,y
p
)}
χ
old
= χ
old
∪{(x,y)}
end
end
return S
t
,χ
old
Algorithm 1: Pseudo code for subnetwork learning.
The activation function of the last layer of the sub-
network is a linear function to suit the cross-entropy
loss. However, after the learning, the activation func-
tion is changed to Rectified Linear Function (ReLU),
which was first proposed by (Fukushima, 1975), to
prevent negative output values from giving adverse
effect.
4.3 Adjusting the Aggregation Layer
After learning the subnetwork, the aggregation layer
is adjusted to fit the final output. The aggregation
layer consists of a fully-connected linear layer, and
is used to re-adjust the old sub-network output with-
out changing the old sub-network parameters. Let Y
i
be the i-th aggregation layer outputs, then
Y
i
≡ ReLU
W
1
T
y
i
+W
2
T
Y
i−1
, (9)
where y
i
and Y
i−1
denote the i-th sub-network output
vector and the i −1-th final output vectors, respec-
tively. W
1
and W
2
are the weight vectors connected
to the i-th sub-network output and the i −1-th final
output vectors, respectively (see Fig 2). Then, the fi-
nal classification output is
c = argmax
j
{Y
i j
}, (10)
where Y
i
= [Y
i1
,···Y
in
]
T
.
This layer is adjusted as follows
W
1
= W
1
−η(t)∇
W
1
L
aggregation
(11)
W
2
= W
2
−η(t)∇
W
2
L
aggregation
(12)
where η(t) is an adaptive learning rate controlled by
Adagrad (Luo et al., 2019), L
aggregation
denotes mean
square error loss given as
L
aggregation
≡
∑
t∈χ
t
∪χ
old
∥Y
i
−y
t
∥
2
(13)
Data: x
Result: Y
N
subnet
for i = 1 to N
subnet
do
S = load(S
i
) //load S
i
from the
secondary storage
W
1
= load(W
i1
)
W
2
= load(W
i2
)
y
i
←− φ(x,S) // calculate the i-th
subnetwork.
Y
i
≡ ReLU
W
1
T
y
i
+W
2
T
Y
i−1
end
return Y
N
subnet
Algorithm 2: Pseudo code for inference.
Figure 2: Example of inference phase behavior.
5 POWER-CONSUMPTION
ANALYSIS
We assume the power-consumption P is proportional
to the computational complexity. So, we estimate P
from the complexity. Each sub-network uses only
some parameters with the top k scores, reducing P by:
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
422

1. Less multiplication of weights and inputs.
2. Less setup for weights. The system only acti-
vates some weight connections, not sending pa-
rameters.
We consider the demands in table2.
Table 2: Notations for analysing power consumption.
item notation
Select the top k score connections. P
select
Calculation of the t-th sub-network
for a single input vector.
P
Csub
(t)
Calculation of the t-th aggregation-
layer for a single input vector.
P
Cagg
(t)
Learning of the t-th sub-network for
getting the top k scores.
P
Lsub
(t)
Learning of the t-th aggregation-
layer.
P
LAgg
(t)
5.1 Forward Calculation
The electricity of forward calculation for the t-
th sub-network and corresponding aggregation layer
P
f orward
(t) can be represented recursively as follows.
P
f orward
(t) = P
Cagg
(t) + P
Csub
(t) + P
f orward
(t −1)
(14)
where P
Cagg
(t) is the calculation cost for t-th ag-
gregation layer. P
Cagg
(t) depends on the number of
output connections of t = 1 ···T sub-networks. In
the t-th round, the aggregation layer’s input size is
t ×m, where m is the output size of each sub-network.
Therefore, if the number of classes is N
c
(output size
of the final layer), the electricity for calculating the
aggregation layer is
P
Cagg
(t) =
m ·N
c
t = 1
2 ·m ·N
c
t ≥2
(15)
Therefore, we obtain
P
f orward
(t) = m ·N
c
(2t −1) +
t
∑
i=1
P
Csub
(t), (16)
where P
Csub
(t) depends on the number of the active
connections, Each sub-network is formed by select-
ing the top k connections. The selected connections
are set to active and the others are set to inactive. This
process wastes a lot of electrical power by sending
the information of the k connection indexes to the de-
vice. This process wastes P
select
= kν
send
where ν
send
denotes a positive coefficient for sending data. From
this, the sub-network wastes
P
Csub
(t) = P
select
+ kν
c
(17)
= k(ν
send
+ ν
c
),
where ν
c
denotes a positive coefficient, which de-
pends on the network structure. Therefore,
P
f orward
(t) = m ·N
c
(2t −1) +tk(ν
send
+ ν
c
), (18)
5.2 Learning
The electricity for the learning of the t-th sub-network
and the t-th aggregation layer P
learning
(t) is repre-
sented by
P
learning
(t) = P
Lsub
(t) + P
Lagg
(t). (19)
The power consumption for the learning sub-
network P
Lsub
(t) depends on the number of parame-
ters in the device N
device
and the number of samples
for the t-th round N
samples
(t).
P
Lsub
(t) = N
samples
(t)N
epoch
N
device
ν
l
(20)
where ν
l
denotes a positive coefficient for the learning
that is related to the network structure, N
epoch
is the
number of epochs. Note that the learning process also
includes the calculation process. We assume that ν
l
also includes the calculation cost, which is executed
during the learning.
The power consumption for the learning aggrega-
tion layer P
Lagg
(t) is
P
Lagg
(t) = N
samples
(t) ·N
epoch
(t ·m ·N
c
+ P
f orward
(t −1)),
(21)
Therefore,
P
learning
(t) = N
samples
(t)N
epoch
(N
device
ν
l
(22)
+ t ·m ·N
c
+ P
f orward
(t −1)
,
5.3 Power-Consumption vs # of
Sub-Networks
The power consumption for the forward calculation
5.1 and the learning 5.2 are O(t) for the t-th round.
In the t-th round, the total number of sub-networks
is t. This means that there is a trade-off between
the power-consumption and the ability of the sys-
tem, which increases by growing the number of sub-
networks. This also means that the system should
limit the number of sub-networks to a certain number
to reduce the power consumption.
6 EXPERIMENTS
Two experiments were conducted in this study. The
first experiment involved checking the proposed net-
work Swap-NN for incremental learning tasks using
the MNIST dataset. The MNIST dataset was divided
into two or five sub-datasets.
Swap-Deep Neural Network: Incremental Inference and Learning for Embedded Systems
423
The second experiment involved checking the per-
formance of the Swap-NN for the large-scale learning
tasks. The CIFEAR-10 dataset was used to achieve
this. The CIFEAR-10 was divided into 2 subdatasets,
and Swap-NN repeated the learning 2 times.
6.1 Experiment for MNIST Dataset
We developed our program-code based on a sample.
https://github.com/allenai/hidden-networks/
simple_mnist_example.py
The size of each layer is the same as that of the origi-
nal program as listed in Table 3.
Table 3: Network size for MNIST: ’Conv’, ’fc’, ’C’, ’RF’
and ’ f [·] denote convolution layer, full-connection layer,
channel, receptive field and activation function respectively.
’fc2:L’ and ’fc2:R’ denote the fc2 layer for the learning and
recognition, respectively.
Layer Input size C RF f [·]
Conv1 28 × 28 32 3 × 3 ReLU
Conv2 28 × 28 × 32 64 3 × 3 ReLU
MaxPool 28 × 28 64 2 × 2 –
fc1 1 × 9216 128 – ReLU
fc2:L 1 × 128 10 – Linear
fc2:R ReLU
It should be noted that non of the convolution or
fully-connecting layers have bias terms. The ReLU
was used as the activation function(Krizhevsky et al.,
2012). The initialization of each weight strength w
uv
for the l-th layer was set using the Kaiming-normal
distribution(He et al., 2015) D
l
= N (0,
p
2/n
l−1
),
where n
l−1
denotes the number of inputs from the
previous layer. In contrast, the initial scores s
uv
were
sampled uniformly from the set {−
√
5,
√
5}.
6.1.1 Set Up of the Learning Samples
To evaluate the incremental learning ability of the pro-
posed method, its accuracy was evaluated for the test
samples after each incremental learning phase.
To this end, we used split MNIST, in which the
MNIST was divided into several groups. For exam-
ple, if MNIST was divided into two groups, the first
group was the set of samples for labels {0,1,2,3,4},
and the second group was the set of samples for la-
bels {5,6,7,8,9}. During each incremental learning
phase, samples from a specific group were presented.
6.1.2 Evaluation
The learning task used in this paper corresponds
to ’incremental-class learning’ in the literature (Hsu
et al., 2018). We compared SwapNN’s performances
with those of the other methods on ’incremental-class
learning’ listed in (Hsu et al., 2018). After the last
incremental learning phase, the accuracy was eval-
uated using all test samples. If the learning ma-
chine causes the catastrophic forgetting due to the in-
cremental learning, the accuracy after the last incre-
mental learning will be low. If the learning method
yielded an accuracy of approximately 100× index of
the incremental learning phase/total number of incre-
mental learning, the learning method had achieved the
desired results.
6.1.3 Results
Preliminary results are shown in Table 4, This table
shows the accuracy of our proposed system, Swap-
NN, and other learning methods after learning the
MNIST dataset, which is divided into five sub-groups.
The table also shows the accuracy of other learning
methods: EWC (Kirkpatrick et al., 2017), SI (Zenke
et al., 2017) , Naive-rehearsal (Hsu et al., 2018) ,
MAS (Aljundi et al., 2018) and LwF (Li and Hoiem,
2016) , which are the same as the data reported in
(Hsu et al., 2018). Additionally, we list the Swap-NN
with two subnetworks, which learns MNIST divided
into two groups, at the bottom of the table.
The hyper parameter k of Swap-NN, which is the
number of the most important connections for yield-
ing the output, was set to k = κ ×N
device
. Note that
κ(< 1) denote the ratio and κ = 0.7. The replay-buffer
size B of Swap-NN was set to 12000. The Swap-NN
that learned five classes par each incremental learning
phase showed the highest accuracy (see the bottom of
Table 4).
We evaluated the memory consumption and com-
putational complexity of the models. The network
size of the competing models except Swap-NN was
almost the same, and the number of variable weight
parameters was 1708446. The total number of weight
connections in Swap-NN was 1199648. However,
Swap-NN used κ× 1199648 connections to com-
pute a single subnetwork output for the current input.
Therefore, in the case of the Swap-NN having two
subnetworks, it uses 2 ×κ×1199648 = 1679927 con-
nections to obtain the final output. This number of
connections is not much different from the competing
models.
6.2 Experiment for CIFAR-10
Swap-NN was also tested for a more challenging
learning task by using CIFAR-10. CIFAR-10 dataset
was divided into two sub-datasets, thus each of the
two sub-datasets includes five classes dataset. The
network size is shown in Table 5, whose total number
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
424
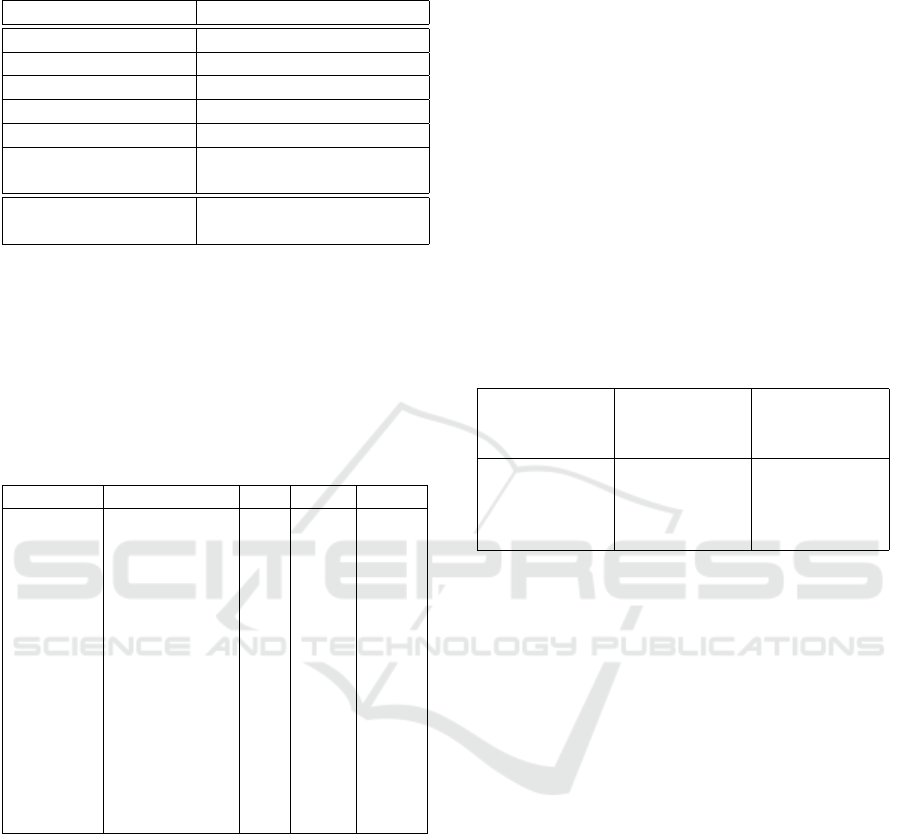
Table 4: Accuracy for MNIST dataset. The results reported
in (Hsu et al., 2018) are listed except those for Swap-NNs.
Method Incremental class learning
EWC 19.80 ± 0.05
SI 19.67 ± 0.09
MAS 19.52 ± 0.29
LwF 24.17 ± 0.33
Naive rehearsal 90.78 ± 0.85
Swap-NN (five sub-
networks)
90.92 ± 0.97
Swap-NN (two sub-
networks)
94.29 ± 0.32
of parameters are the same as that of the network used
in the previous experiment. Note that this network
size is relatively smaller than the normal network size
for the learning of CIFAR-10.
Table 5: Network size for CIFEAR-10: ’Conv’, ’fc’,’RF’,
’C’ and ’BN’ denote convolution layer, full-connection
layer , receptive field, channel and batch-normalization
layer respectively. ’fc2:L’ and ’fc2:R’ denote the fc2 layer
for the learning and recognition, respectively.
Layer Input size C RF f [·]
Conv1 32 × 32 × 3 64 3 × 3 ReLU
Conv2 32 × 32 × 64 64 3 × 3 ReLU
BN1 32 × 32 × 64 64 – –
MaxPool1 32 × 32 64 2 × 2 –
Conv3 32 × 32 × 64 128 3 × 3 ReLU
Conv4 32 × 32 × 128 128 3 × 3 ReLU
BN2 32 × 32 × 128 128 – –
MaxPool2 32 × 32 128 2 × 2 ReLU
Conv5 32 × 32 × 128 256 3 × 3 ReLU
Conv6 32 × 32 × 256 256 3 × 3 ReLU
BN3 32 × 32 × 256 256 – –
MaxPool3 32 × 32 256 2 × 2 ReLU
fc1 1 × 4096 256 – ReLU
fc2:L 1 × 256 10 – Linear
fc2:R ReLU
We compare the Swap-NN performance with that
of the same sized neural network, which has learned
all training samples of the CIFAR-10. The perfor-
mances of the both networks after finishing the learn-
ing were evaluated by using the validation set in the
CIFAR-10. The test was repeated 10 times by chang-
ing the initial weight connections randomly. The re-
sults were averaged over the 10 trials and 95 percent
confidence intervals were also estimated.
6.2.1 Results
The buffer size B was set to 20000.
We compared the accuracy rate of SwapNN,
which learned five classes at a time, with that of a
network that learned all classes simultaneously, un-
der the same conditions with those of SwapNN (the
same network size and 5 epochs). Table 6 shows the
accuracy after the initial and incremental learning.
This result suggests that the accuracy of our pro-
posed SwapNN is about 5.3 points less than the net-
work, which learns all classes at a time. However,
after the initial learning, the accuracy for the 1st five
classes was 79.8 %. Each subnetwork has no opportu-
nity to learn the class boundaries between the future
presented classes. Therefore, each subnetwork out-
put will conflict to the future unknown classes. To
overcome this problem, the last aggregation layer has
to adjust to this kind of mismatch. However, there are
possibility that the last aggregation layer could not ad-
just this conflict completely in the case of CIFAR10.
Table 6: 95% confidence interval of SwappNN accuracy af-
ter each incremental learning on CIFAR-10 (The ’Competi-
tor’ is the network that learned all classes at once.).
After initial
learning
After the
incremental
learning
Competitor
39.42 ± 0.20
% (79.8%
for learned 5
classes)
65.09 ± 1.17
%
70.95 ± 0.53
%
7 DISCUSSION
7.1 Computational Complexity vs
Accuracy
Obviously, the computational complexity is low if k is
small. Instead of the light weight computation of the
sub-network, the proposed method has to repeat the
setup of the sub-network and calculation of the sub-
network. To reduce the computation time, k should be
small enough to realize a quick computation. How-
ever, too small k will yield the degradation of the per-
formance.
7.2 Suitable Learning Strategy for Each
Sub-Network
In the classification tasks, each sub-network should
learn the class-boundaries. Without the information
for the boundaries, the learning machine will fail to
acquire a high performances. So, the number of
classes, of which the learning samples presented dur-
ing an incremental learning phase, should be large.
The connection set found in each learning phase
are stored in the second storage device and fixed so
Swap-Deep Neural Network: Incremental Inference and Learning for Embedded Systems
425

far. However, the connection set should be updated
when environment is changed. The distillation strat-
egy employed in Foster (Wang et al., 2022) is also
useful for reducing and re-adjusting the subnetworks.
The distillation operation will give a clear opportunity
to make each subnetwork and corresponding aggrega-
tion layer learn class boundaries.
8 CONCLUSION
In this paper, a hidden neural network based incre-
mental learning method: Swap deep neural network
is proposed. This model has been followed two ad-
vantages:
1. The hidden neural network can reuse its neurons
in several different tasks by reconfiguration of the
neural network circuit. So, this architecture is
suitable for a small embedded systems, where the
storage capacity is limited.
2. The sub-network is not modified after the cre-
ation. This means that the system does not cause
the catastrophic forgetting.
The simulation results suggest that Swap-NN re-
alizes an effective execution of large-scale neural net-
works with a small amount of resources.
REFERENCES
Aljundi, R., Babiloni, F., Elhoseiny, M., Rohrbach, M.,
and Tuytelaars, T. (2018). Memory aware synapses:
Learning what (not) to forget. In Proceedings of
the European Conference on Computer Vision (ECCV
2018).
French, R. M. (1997). Pseudo-recurrent connectionist
networks: An approach to the “sensitivity stability”
dilemma. Connection Science, 9(4):353–379.
French, R. M. (1999). Catastrophic forgetting in connec-
tionist networks. TRENDS in Cognitive Sciences,
3(4):128–135.
Freund, Y. and Schapire, R. E. (1997). A decision-theoretic
generalization of on-line learning and an application
to boosting. Journal of Computer and System Sci-
ences, 55(1):119–139.
Fukushima, K. (1975). Cognitron: A self-organizing mul-
tilayered neural network. Biological Cybernetics,
20(3):121–136.
Hayes, T. L., Kafle, K., Shrestha, R., Acharya, M., and
Kanan, C. (2019). Remind your neural network to
prevent catastrophic forgetting. CoRR.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Delving
deep into rectifiers: Surpassing human-level perfor-
mance on imagenet classification. In 2015 IEEE In-
ternational Conference on Computer Vision (ICCV),
pages 1026–1034.
Hinton, G., Vinyals, O., and Dean, J. (2015). Distilling the
knowledge in a neural network. arXiv.org.
Hirose, K., Yu, J., Ando, K., Okoshi, Y., Garc
´
ıa-Arias,
´
A. L., Suzuki, J., Chu, T. V., Kawamura, K., and Mo-
tomura, M. (2022). Hiddenite: 4k-pe hidden network
inference 4d-tensor engine exploiting on-chip model
construction achieving 34.8-to-16.0tops/w for cifar-
100 and imagenet. In 2022 IEEE International Solid-
State Circuits Conference (ISSCC), volume 65, pages
1–3.
Hsu, Y.-C., Liu, Y.-C., Ramasamy, A., and Kira, Z. (2018).
Re-evaluating continual learning scenarios: A cate-
gorization and case for strong baselines. In Ben-
gio, S., Wallach, H., Larochelle, H., Grauman, K.,
Cesa-Bianchi, N., and Garnett, R., editors, Advances
in Neural Information Processing Systems 31. Curran
Associates, Inc.
Ishikawa, M. (1996). Structural learning with forgetting.
Neural Networks, 9(3):509–521.
Kirkpatrick, J., Pascanu, R., Rabinowitz, N., Veness, J.,
Desjardins, G., Rusu, A. A., Milan, K., Quan, J., and
Ramalho, T. (2017). Overcoming catastrophic forget-
ting in neural networks. Proceeding of the National
Acacemy of United States of America, 114(13):3521–
3526.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Pereira, F., Burges, C. J. C., Bottou,
L., and Weinberger, K. Q., editors, Advances in Neu-
ral Information Processing Systems 25, pages 1097–
1105. Curran Associates, Inc.
Li, Z. and Hoiem, D. (2016). Learning without forgetting.
In European Conference on Computer Vision 2016,
pages 614–629. SCITEPRESS ? Science and Technol-
ogy Publications, Lda.
Luo, L., Xiong, Y., Liu, Y., and Sun, X. (2019). Adap-
tive gradient methods with dynamic bound of learning
rate. In International Conference on Learning Repre-
sentations ICLR2019.
Mallya, A. and Lazebnik, S. (2018). Packnet: Adding mul-
tiple tasks to a single network by iterative pruning.
In CVPR, Conference on computer vision and pattern
recognition 2018, pages 7765–7773.
Ramanujan, V., Wortsman, M., Kembhavi, A., Farhadi, A.,
and Rastegari, M. (2020). What’s hidden in a ran-
domly weighted neural network? arXiv.org.
Rusu, A. A., Rabinowitz, N. C., Desjardins, G., Soyer,
H., Kirkpatrick, J., Kavukcuoglu, K., Pascanu, R.,
and Hadsell, R. (2016). Progressive neural networks.
CoRR.
Sadel, J., Kawulok, M., Przeliorz, M., Nalepa, J., and
Kostrzewa, D. (2023). Genetic structural nas: A neu-
ral network architecture search with flexible slot con-
nections. In GECCO’23 Companion: Proceedings of
the Companion Conference on Genetic and Evolution-
ary Computation, pages 79–80. Association for Com-
puting Machinery.
Wang, F.-Y., Zhou, D.-W., Ye, H.-J., and Zhan, D.-C.
(2022). Foster: Feature boosting and compression
for class-incremental learning. In ECCV 2022: 17th
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
426

European Conference, Proceedings, Part XXV, pages
398–414.
Yamauchi, K., Yamaguchi, N., and Ishii, N. (1999). In-
cremental learning methods with retrieving interfered
patterns. IEEE TRANSACTIONS ON NEURAL NET-
WORKS, 10(6):1351–1365.
Zenke, F., Poole, B., and Ganguli, S. (2017). Continual
learning through synaptic intelligence. In Proceed-
ings of the 34th International Conference on Machine
Learning, Sydney, Australia, PMLR 70, 2017.
Zheng, N. and Mazumder, P. (2020). Learning in Energy-
Efficient Neuromorphic Computing: Algorithm and
Architecture Co-Design. John Wiley & Sons Inc.
Swap-Deep Neural Network: Incremental Inference and Learning for Embedded Systems
427
