
An Automated Adaptive Security Framework for Cyber-Physical
Systems
Elias Seid, Oliver Popov and Fredrik Blix
Department of Computer and Systems Sciences, Stockholm University, Sweden
Keywords:
Security Engineering, Control Theory, Adaptive Systems, Security Solution, Multiple Failure, Cyber-Physical
Systems.
Abstract:
The paper promotes the notion that any security solution for cyber-physical systems (CPS) should be adaptive
and based on the type of attacks and their frequency. Namely, the solution should monitor its environment con-
tinuously to defend itself from a cyber-attack by modifying its defensive mechanism. Moreover, the research
provides analyses of situations where the environment changes dynamically over time, requiring the desig-
nated adaptation to contemplate and respond adequately to these changes. In particular, it explores applying
adaptive model predictive control concepts derived from control theory to develop specific adaptive security
solutions. These systems can make decisions by forecasting their future performance for various modes or op-
tions of adaptation. Using quantitative information, the software then selects the adaptations that minimise the
cost associated with security failures. This is highly significant considering that CPS are engineered systems
built from and depend upon the seamless integration of computational algorithms and physical components.
Moreover, security breaches are rising, and CPS are challenged by catastrophic damage, resulting in billions
of losses making many of today’s solutions obsolete. While security agents issue new sets of vulnerability
indicators and patches to address security breaches, these changes are continuous processes ad infinitum. A
case study on a medical emergency response system illustrates the essential and salient futures of the proposed
adaptive security framework for CPS.
1 INTRODUCTION
Most of today’s software systems operate as compo-
nents of cyber-physical systems (CPSs), which also
include physical (e.g., robotic, mobile) components
and social components (e.g., humans, enterprise units,
and business processes). The components of such
CPSs act autonomously by nature but do coordinate
in order to fulfill system requirements. Software sys-
tems in diverse areas such as healthcare, government,
and financial services are often CPS (Griffor et al.,
2017; Boyes et al.,2018)
The scope of smart objects encompasses diverse,
dynamic, and adaptable networks commonly known
as sensor networks. These networks are comprised of
numerous smart devices that are geographically dis-
persed and can be conveniently attached to physical
objects. These devices have the capability to mon-
itor various parameters such as temperature, sound,
vibration, pressure, and motion. Additionally, they
are able to transmit the collected data to software sys-
tems located remotely. For example, an emergency
healthcare service is a CPS that includes components
of hospitals, emergency healthcare workers, doctors,
and nurses that perform business processes for dis-
patching an ambulance to an accident scene, admit-
ting a patient to a hospital emergency ward, and treat-
ing the patient’s injuries.
Designing a security solution for CPS is more
challenging compared to software systems due to the
need to consider not only the properties of individual
components (such as sensing, communication, and
computing components) but also their interaction with
the physical environment (Banerjee et al., 2012). Ad-
versaries have the ability to exploit components of
CPS that are exposed to heightened risk and vulnera-
bility. This is due to the fact that these components,
such as sensors, operate within an open environment
that lacks adequate security measures. As a result,
security threats such as unauthorised information dis-
closure, transmission of falsified data, and violations
of authentication and authorization protocols must be
carefully considered. For instance, items belonging
to the CPS may become accessible to the general
242
Seid, E., Popov, O. and Blix, F.
An Automated Adaptive Security Framework for Cyber-Physical Systems.
DOI: 10.5220/0012469100003648
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Information Systems Security and Privacy (ICISSP 2024), pages 242-253
ISBN: 978-989-758-683-5; ISSN: 2184-4356
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

public, such as when they are affixed to vehicles or
containers. Consequently, the data associated with
these items can be readily manipulated, removed, or
even destroyed.Sensors have the potential to offer vi-
tal security information to the application in real-time,
thereby introducing new security requirements that
must be acknowledged and fulfilled (Mu¨ller et al.,
2016). Dealing with security issues for such complex
systems remains a challenging unsolved problem, as
CPSs span three realms: physical, cyber (software),
and social (Shafi, Q. et al.,2012, ; Morais et al., 2013)
each of which comes with its own complexities and
vulnerabilities, and they need coordinated security so-
lutions.
Adaptive CPS: are expected to function within envi-
ronments characterised by significant dynamism and
successfully achieve a multitude of goals. When a
failure is detected, specifically when a goal is not
achieved, as a result of external disturbances such as
excessive traffic or unpredictable user behaviour, a
new configuration is implemented. However, formu-
lating an approach to mitigate the impacts of changes
poses a formidable challenge(K. Angelopoulos et al.,
2014)
The primary challenge lies in the unwanted inter-
vention of numerous parameters from the configura-
tion space, each with its own set of goals. As a re-
sult, the execution of adaptation mechanism may po-
tentially result in the restoration of security goal sat-
isfaction, but it also carries the risk of failure or exac-
erbation of security goals.
Control Theory: has emerged as a significant field
of study, offering valuable theoretical and practical
frameworks for managing complex systems charac-
terised by multiple parameters (inputs) and multiple
objectives (outputs). The existing methods for creat-
ing self-adaptive software either address each objec-
tive separately without considering potential conflicts
(Y. Brun et al., 2009; A. Filieri et al., 2011 ; A. Filieri
et al., 2014; V. Souza et al., 2012 ), or they only re-
actively adapt after a failure has occurred without any
consideration for future occurrences ( A. Filieri et al.,
2015; S. Cheng et al., 2006; C. Klein et al., 2014; K.
Angelopoulos et al., 2014 ; P. Zoghi et al., 2014) or
proactive measures for failure anticipation. In situa-
tions where the workload increases and a specific ob-
jective is not achieved, supplementary resources are
allocated to the system in order to address the failure.
The existing approaches(H. Ghanbari et al., 2014;
D. Kusic et al., 2008; Q. Zhang et al., 2012 ) address
the challenge of managing conflicting demands and
the associated costs of adaptation by employing pre-
dictive models of the system’s environment. These
models enable the anticipation of failures and the de-
velopment of reconfiguration plans that optimise the
system’s utility output over time. This optimisation
is achieved through the application of a control the-
oretic technique known as Model Predictive Control
(MPC) and its various adaptations (J. Maciejowski et
al., 2002).
Nevertheless, these methodologies are limited to
addressing resource allocation and architectural de-
sign, disregarding the aspects of requirements and be-
haviour within the adaptation space (K. Angelopou-
los et al., 2015). Furthermore, the absence of a cy-
ber security methodology that establishes a connec-
tion between the components of Model Predictive
Control (MPC) and those of adaptive software sys-
tem hinders designers from employing this technique
in domains beyond service-based applications. Cur-
rently, the existing approaches primarily concentrate
on service-based applications. Several studies (Gag-
gero and Caviglione, 2016; Ghanbari et al., 2014; Ku-
sic et al., 2009; Roy et al., 2011) have employed pre-
dictive control techniques in the field of cloud com-
puting to ensure the fulfilment of nonfunctional prop-
erties. Based on current understanding, cyber secu-
rity have displayed hesitancy in embracing predictive
control for various domains due to the absence of ad-
equate tools and methodologies for modelling secu-
rity goals and parameters within a control-theoretic
framework.
This paper offers an analysis of the integration of
principles derived from the disciplines of Cybersecu-
rity and Control Theory, building upon our previous
research on security attack event monitoring (Seid et
al. 2023). The main aim of this study is to present
an adaptive security solution through the use of key
components of model predictive control within the
domain of CPS.
The purpose of this study is to determine a re-
lationship between the aforementioned components
and the security goal of the system being examined.
Moreover, the current analysis presents XA4AS
1
framework that facilitates the formulation of the nec-
essary analytical models for model predictive control
and adaptive security solutions for CPS. The frame-
work that has been developed incorporates fundamen-
tal concepts derived from the discipline of Software
Engineering( K. Angelopoulos et al., 2014;)
The implementation of model predictive control
ensures the reduction of excessive overshooting, ef-
fective handling of constraints, and the achievement
of an optimal balance among competing security ob-
jectives over a specified time frame, facilitated by the
utilisation of prioritisation techniques. This study em-
1
Extended Asfalia (Framework) for Adaptive Security
(of Cyber-Physical Systems)
An Automated Adaptive Security Framework for Cyber-Physical Systems
243

ploys the Analytic Hierarchy Process (AHP) method-
ology, which has been previously documented in
scholarly literature(J. Karlsson).
We employ a combination of model predictive
control techniques, as described in (M. Gagger et a.,
2015; A. Filieri et al., 2014; A. Filieri et al., 2015),
to forecast the future behaviour of the controlled sys-
tem within a defined time period. Additionally, we
propose the adoption of a dynamic methodology for
generating adaptation strategies aimed at reducing the
deviation of each security mechanism from the prede-
termined threshold set by the relevant stakeholders.
The remaining parts of this paper are structured
as follows. Section 2 provides the research founda-
tion for our work, while Section 3 illustrates the for-
malisation process, and Section 4 offers a case study.
Section 5 introduces the XA4AS framework and ex-
periment, while section 6 focuses on the behavioural
model. Section 7 provides discussions, while Section
8 concludes and addresses future work.
2 RESEARCH BASELINE
The proposed approach incorporates principles and
methodologies derived from Software engineering,
Cyber security and systems engineering disciplines.
This section provides a brief summary of the key ele-
ments within each of these domains that were used as
the foundation for our research work.
2.1 Security Attack Event Monitoring
for Cyber Physical-Systems
This section presents the Asfalia framework that sup-
ports the monitoring of security attack events for
CPSs, and the framework spans the three realms of a
CPS. Moreover, the framework supports cross-realm
analysis and monitoring, which spins off security
events across realms. Our models focus on realm-
specific adversaries, meaning that they span the three
realms of a CPS (cyber, physical infrastructure, and
social). We also analysed the interdependent relation-
ships among realm-specific attack models. The AM
depends on the VM model in revealing realm-specific
vulnerabilities, and vulnerabilities captured by (the
VM ) spin off and provides inputs to the next realm
(AM). Thus, a suitable attack mechanism is selected
by taking advantage of the weaknesses of the VM.
More detailed information can be found in (Seid et
al., 2023). The Asfalia analysis process consists of
the following steps.
Vulnerability Model(VM): This model captures the
attack patterns, potential threats, and type of asset, in
which an asset is a potential target for cyber attacks.
Attack-Mechanism Model (AM): This model cap-
tures design strategies for different attack pattern
mechanisms. More importantly, it builds attack mech-
anisms by employing goal models, domain assump-
tions, attack mechanisms, and task operationalization
artefacts.
Behavioural Model (BM): Building a complete be-
havioural model for very complicated systems such as
CPS, with many complex and heterogeneous states, is
often challenging.
Event Model (EM): This model captures events de-
rived from Behavioural Models (BM).
2.2 Security Models
Monitoring and assessing requirements satisfaction is
essential for self-adaptive systems. Awareness Re-
quirements (AwReqs) are used to track the success of
other requirements, inspired by feedback control the-
ory. An AwReq sets a constraint that prompts adap-
tation upon violation and Each AwReq has variables
called indicators that measure the success of a mon-
itored requirement. Two types of parameters affect
indicator values: environmental parameters that can-
not be controlled, and control parameters that can be
adjusted at runtime (K. Angelopoulos et al., 2014).
We adopt some of their concepts into our framework
to monitor security mechanisms(solutions).
Moreover, another kind of security requirement
that has been incorporated into our approach is known
as an evolution security goal. These conditions are
applicable under specific circumstances and serve as
substitutes for other requirements, either temporar-
ily or permanently. These modifications are imple-
mented through a series of actions referred to as
EvoSm operations. In addition to the specified re-
quirements for the system under consideration, there
are also constraints imposed on the process of adap-
tation itself, which are referred to as adaptation re-
quirements (AdReqs) ( V. Souza et al., 2012). In our
proposed framework, we have extnded an AdReqs to
generate two distinct security mechanisms, namely
EvoSm (evolvable security mechanism) and ASm
(adaptive security mechanism), respectively.
2.3 Dynamic System
A sufficiently accurate quantitative dynamic model
can be obtained through system identification tech-
niques (L. Ljung et al., 2010) and can be utilised for
control design. The dynamic relation between the
vector of control parameter values, u(t)∈ (R
m
) and the
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
244

vector of indicators, y(t) ∈ (R
p
), is described as fol-
lows.
y
(t)
i
=
p
∑
j=1
n
y
∑
k=1
α
i j
k
y
(t−k)
j
+
m
∑
j=1
n
u
∑
k=1
β
i
j
kU
(t −k)
j
(1)
For all i = 1, . . . , p, and with α(
i
j
k
) ∈ R.
The quantitative dynamic model (1) links the in-
dicator yi at time t to past values of all indicators,
taking into account potential mutual influences and
control parameter values. The adaptation process can
be guided by model (1) to capture implicit relation-
ships among indicators. It should be noted that in
cases where certain variables do not have an impact
on the value of the indicator yi(t), the corresponding
parameters are effectively zero.
The discrete-time state-space dynamic model pro-
vides a more concise and equivalent representation of
this relation.
(
x(t + 1) = A
x
(t) + B
u
(t) (2)
y(t) = C
x
(t)
The vector denoted as x(·) represents the dynamic
state of the model. In the context of physical systems,
the state x(·) is commonly linked to tangible physi-
cal quantities. However, it is important to note that
the state can also be an abstract representation of the
system, lacking of direct measurability. The matri-
ces (A, B, C) encompass the complete representation
of the relationship between inputs and outputs within
the system, and are derived as a result of the System
Identification procedure.
The analytical model described by Equation (1)
demonstrates that the output of the system may ex-
hibit a correlation with previous outputs and control
inputs (V. E. S. Souza et al., 2011). The aforemen-
tioned entities are dynamic systems within the field
of Control Theory. If there is no apparent connection
between the previous behaviour of the indicators and
control inputs, matrix A will consist entirely of zero
elements. In this scenario, the system merely maps
inputs to outputs without any dynamic relation.
y(t) = CB
u
(t − 1)
The use of Equation (2) enables the design of a con-
trol system that possesses the capability to modify
the values of all control parameters. This adjustment
is performed with the objective of achieving conver-
gence of each indicator to the value specified by an
AwReq threshold. This design assumes that the se-
lected set of control parameters has the capacity to
guide the system towards the predetermined goals. In
contrast to qualitative adaptation, quantitative models
offer the advantage of precise conflict resolution (K.
Angelopoulos et al., 2014).
2.4 Model Predictive Control
We present a receding horizon model predictive con-
trol (MPC) approach (E.Camacho et al.,2004; J. Ma-
ciejowski et al., 2002) that effectively addresses the
management of multiple conflicting goals through the
use of multiple control parameters. When the con-
troller is enhanced with a Kalman Filter (KF) (L.
Ljung et al., 2010), it has the capability to acquire
knowledge in real-time and adjust the controller ac-
cording to the behaviour of the system. This allows
the controller to overcome inherent inaccuracies aris-
ing from dynamics that are not accounted for in model
(2), as well as unknown disturbances affecting the
system.
(MPC) is a control technique that employs an opti-
misation problem to determine a set of control param-
eters (actuators), denoted as u(·), in order to achieve
a desired set of goals, denoted as y◦(·), for a set of
indicators, denoted as y(·), over a prediction hori-
zon H. The control parameters u* are determined at
each control instant t by minimising a cost function
J(t), while adhering to specified constraints. The opti-
misation problem involves making predictions about
the future behaviour of the system using the dynamic
model (2).
As a result, a derived solution refers to a planned
arrangement of forthcoming control parameter values
U
∗
= U
∗
t
+ 1, .......U
∗
t
+ H − 1 across the anticipated
time horizon. Effective planning is particularly cru-
cial in situations where there is a delay in the occur-
rence of changes in control parameters.
The receding horizon principle applies only the
first computed value u
∗
t
to the system, u(t)=u
∗
t
. Cre-
ating perfect models for real-world systems is impos-
sible due to their dynamic behaviour. Therefore, plan
corrections are necessary at each step and the horizon
is reduced by one unit. The plan may fail due to exter-
nal disturbances such as system workload changes. In
essence, the plan would have been followed if a per-
fect model and no disturbances were present, which
is not feasible. At the next control instant, a new plan
is created based on the updated measured values of
indicators to overcome this obstacle. This accounts
for modelling uncertainties and unanticipated system
behaviours (2). The model has been incorporated into
our framework for adaptive security strategies and is
integrated within our architecture, as detailed in the
subsequent section.
An Automated Adaptive Security Framework for Cyber-Physical Systems
245
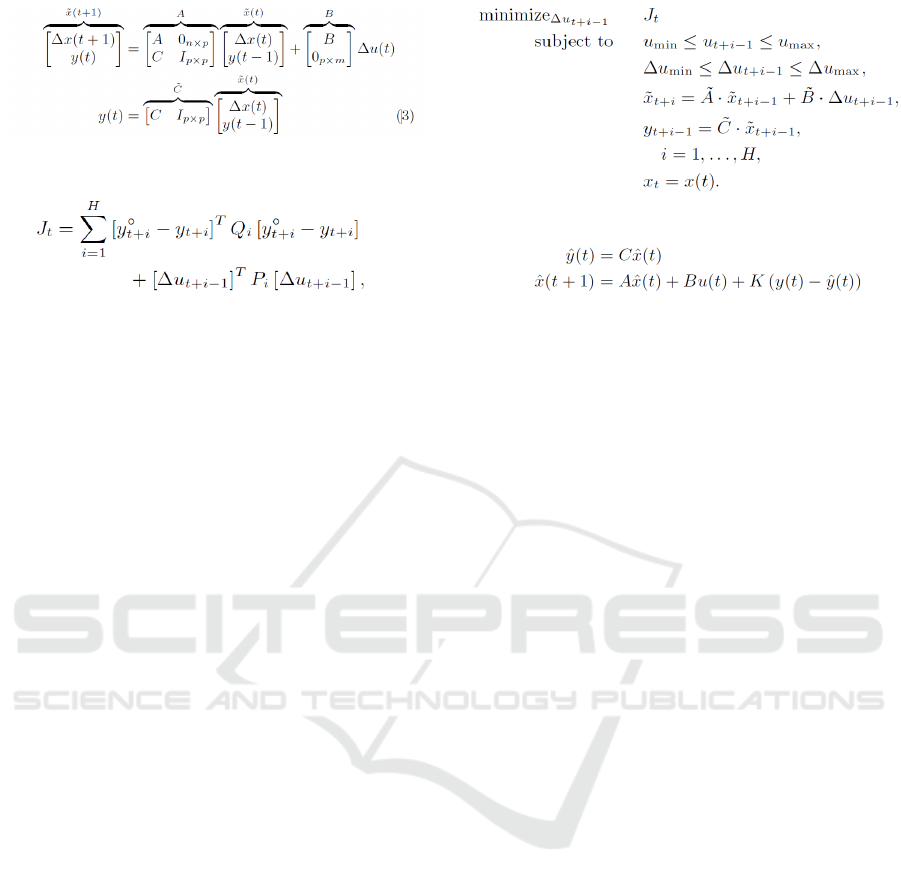
Figure 1: Dynamic Model.
Figure 2: Cost Function.
3 FORMALISATION
In order to clarify the core rationale of the model pre-
dictive control approach, it is necessary to modify the
dynamic model 2.
State variation is ∆x(t)=x(t) - x(t - 1), while con-
trol increment is ∆u(t)= u(t) - u(t - 1). The system
output y(t) remains unchanged, but now reflects state
variations x(t) rather than state values x(t). The new
dynamic model (3) predicts over a finite horizon H.
The controller will use this to predict the values of
states and indicators after H time steps from the cur-
rent one(). MPC controller reduces cost function as
shown in fig 3 below.
Where Q
i
∈ R
p×p
andP
i
∈ R
m×m
are symmetric
positive semi-definite weighting matrices are utilised
to represent the relative significance of the gap be-
tween the goals and the present values, as well as the
resistance to change in the actuators’ values. Specif-
ically, Qi refers to a matrix with diagonal elements
that represent the weights derived from the applica-
tion of the Analytical Hierarchy Process (AHP) (J.
Karlsson et al., 1997). This process involves stake-
holders conducting pairwise comparisons to prioritise
the goals that have been elicited. This implies that
in cases where all goals cannot be achieved simul-
taneously due to conflicts, the controller will priori-
tise the fulfilment of goals with higher weights of the
other control parameters. Consider the weight matrix
Q as Q := Q
1
= Q
2
= .....Q
H
, and the weight matrix
P as P := P
1
= P
2
= ....P
H
. The resulting optimisation
problem for the Model Predictive Control (MPC) can
be formulated as follows:
The aforementioned formulation can be consid-
ered as a convex Quadratic Programming (QP) prob-
lem, as stated in reference (Y. Wang et al., 2010 ).
The issue exhibits a time complexity of O(H
3
m
3
). A
potential solution to the issue entails the formulation
Figure 3: MPC Optimization Problem.
Figure 4: KF.
of an optimal strategy plan for the future ∆u
∗
t+i−1
, i =
1....., H, but only the first one is applied, i.e., ∆u(t) =
∆u
∗
t
, and the New control signal is: u(t) = u(t − 1) +
∆u(t).
The MPC strategy operates under the assumption
that the system’s state can be measured. However, in
numerous instances, this assumption is not feasible.
Indeed, due to the frequent absence of a correlation
with physical quantities, the meaningful interpreta-
tion of x(t) becomes unattainable, as a result, render-
ing its measurement impossible. However, according
to the dynamic model above, it is feasible to estimate
its value by measuring the values of y(t) and u(t).
In order to achieve this objective, we adopt (K.
Angelopoulos et al., 2014) and employ a Kalman Fil-
ter (KF) algorithm that calculates an estimated value
ˆx(t + 1) f orthestatex(t + 1). This estimation is based
on measurements of the applied control signal u(t)
and the output y(t) as follows:
KF variables are often referred to as “hat” vari-
ables, such as ˆx(k) and ˆy(k), to differentiate them
from dynamic model variables. The KF as shown in
fig 4 estimates the output ˆy(t) based on the state esti-
mate ˆx(t) to measure the difference between the pre-
dicted and real values. The Kalman gain, or value of
K, adjusts the dynamics of the KF by weighing the
difference between the predicted value ˆy(t) and the
real value y(t) (L. Ljung et al., 1999). Use the es-
timate ˆx(t) instead of x(t) to solve the optimisation
problem as shown in Figure 4.
In some cases, the time needed to calculate the
next control action value may be longer than the time
between two subsequent actions. Utilising the proac-
tive nature of the MPC is another option for meeting
real-time deadlines. The MPC calculates a plan of
future actions ∆u
t+i−1
, i = 1, ...., H at each iteration
step. The receding horizon principle dictates that only
the first action ∆u(t) = ∆u
∗
t
is applied.
If the solver takes longer to converge at the next
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
246

control instant, a new control action may be needed to
find the optimal solution. The previously computed
plan can be stored. To apply the second control ac-
tion, use ∆u(t + 1) = ∆u
∗
(
t + 1). This approach is
suboptimal as it misses the last information about the
measured output, but still meets real-time deadlines.
4 THE CASE STUDY: MEDICAL
EMERGENCY RESPONSE
SYSTEM
A smart item is an Internet of Things device that
generates data about itself, an object it is associated
with, or its environment. For instance, a sensor that
measures the temperature of a physical environment
and transmits the data is a smart item. The domain
of smart items encompasses heterogeneous, dynamic,
and flexible networks commonly referred to as sensor
networks (Conway, J. et al., 2016)
The case study Smart Items Medical Emergency
Response ( MERS) is adopted from the SERENITY
project.
2
. The validation of our framework will be
demonstrated through the use of MERS, which will
be discussed in the subsequent section.
4.1 Implementation of the MERS
Security Model
The process begins with a timer event, as depicted in
figure five. The event is triggered when the patient
feels dizzy and requests assistance. The request is
then received at the emergency centre, which in turn
checks the availability of a designated doctor and also
obtains a list of available social workers. Then If a
doctor is available, he/she interrogates the patient’s
medical data through his/her e-health terminal and
analyses them to determine an appropriate treatment.
The doctor might even call the patient for further in-
formation if required. Furthermore, the doctor then
writes an e-prescription and uploads it onto the sys-
tem for the patient to access it. However, when the
designated doctor is not available, MERS generates
a list of qualified substitute doctors by obtaining data
from a database. MERS sends a message to all substi-
tute doctors who match the qualifications of the des-
ignated doctors. The doctors who are available reply
to MERS.
MERS selects the doctor who replied first and as-
signs him/her the task. MERS also provides doctors
with medical data from patients in the data repository.
2
http://eu-serenity.sourceforge.net/
Then, the assigned doctor checks the patient’s medi-
cal data and decides on the appropriate treatment to
generate an e-prescription. The patient receives the e-
prescription in his/her e-health terminal and decides
either to go to the pharmacy and buy the prescribed
medicine or to ask MERS to deliver the medicine at
home. In the latter case, MERS receives the list of
available social workers from the database and selects
a suitable worker for the task.
MERS also provides the social worker with au-
thentication to access that patient’s e-prescription.
After receiving the task assignment, the social worker
acknowledges receipt and goes to a pharmacy. The
pharmacy authenticates the patient and gives him/her
the medication. Finally, the medication is delivered to
the patient’s home.
4.2 Vulnerability Model(VM)
The vulnerability model used in our case study,
(MERS), comes from the vulnerability model compo-
nent of Asfalia. This model captures the type of attack
patterns, potential threats, and the type of asset, with
an asset being a potential target for cyber attacks. The
VM consists of the following sub-elements.
Threat: This is the potential for abuse of an asset
that will cause harm in the context of the problem.
Vulnerability: This is a weakness in the system that an
attack exploits. Asset: This is anything that has value
to an organization, and it can be tangible (physical) or
intangible (non-physical) with respect to the target of
the attack.
Vulnerability analysis of the application realm:
Through this analysis, we captured 8 requirements
of the control station application, which are intended
to provide medical data Security Goal (G1), ob-
tain patient-specific settings (G2), send abnormal be-
haviour to MERS (G3), deploy first-aid team (G4),
check the patient’s recent medical history (G5), write
an e-prescription (G6), assign a first-aid team (G7),
and send an acknowledgment to MERS (G8). These
security goals are decomposed into sub goals and
then operationalized with tasks, which assign specific
functionality to support the software components, as
shown in the entire implemented model
3
5 XA4AS FRAMEWORK
The methodology we employ consists of two distinct
stages: the design time phase and the runtime phase.
3
https://www.dropbox.com/scl/fi/0v8995uho1vm3857
nz3pq/Full-model-of-our-case-study.pdf?rlkey=1sjq4s0o0
j4yvof0ha68x32db&dl=0
An Automated Adaptive Security Framework for Cyber-Physical Systems
247

In the initial stage, the necessary models for the syn-
thesis and tuning of the MPC controller are obtained.
As a result, in the subsequent stage, the controller
is implemented within our adaptation framework and
modifies the control parameters of the target system
as necessary.
5.1 Design-Time
Table 1: Security Mechanisms for the Critical Security
Goals.
Security Mechanism Security
Goal
Cabling security between PDA and
control station server
SG1
Control pharmacy access to doctor
e-prescription
SG2
Cabling security between PDA and
MERS
SG3
Secure access layer for e-health ap-
plication
SG4
Secure pipe between MERS and
control station application
SG5
Secure pipe between patient mobile
and control station application
SG6
Cabling security between localiza-
tion server and internet
SG7
Control access to MERS SG8
Access layer for hospital applica-
tion system
SG9
Secure pipe between hospital appli-
cation system and e-health system
SG10
Our approach begins with the elicitation of various
security goals and security mechanisms related to the
target system. When all goals have been refined, ASm
are assigned to those that are deemed most important
and likely to fail. An ASm specifies a reference goal
R i (.) for the output of the controller. Table 6 lists
all of the Medical Report Emergency System’s refer-
ence security goals. The control station application
relies on two sub-goals to achieve the goal of provid-
ing support to write e-prescriptions (G6): ”add a sig-
nature to the prescription (G7)” and ”receive requests
for treatment (G8).” Furthermore, these sub-goals ne-
cessitate the inclusion of components in an applica-
tion that provide the desired functionality.
The control station application must also allow
authorised users to deploy a first-aid team (G4). To
achieve this goal, it must first support two sub-goals:
finding available first aid teams (G11) and authenti-
cating and authorising first aid teams (G9). These
sub-goals are eventually met by the functionality that
allows access to PDA Task2 or (T2) and allows select-
ing Task 3 (T3) and deploying First-Aid Team Task
(T4) as shown in
4
During this stage of the design phase, the domain
experts, in collaboration with the stakeholders, en-
gage in the analysis and evaluation of relevant condi-
tions. They proceed to specify EvoSm for the system
that is being developed. The operations of EvoSm
as defined for the ASm of the Medical Report Emer-
gency System.
Table 2: Reference Security Goal.
CRq Reference
ASm1 R1=80
ASm2 R2=75
ASm3 R3=100
ASm4 R4=90
ASm5 R5=90
ASm6 R6=100
ASm7 R7=80
ASm8 R8=100
ASm9 R9=100
ASm10 R10=90
The G2 system, which involves patient informa-
tion and communication with MERS, has been en-
hanced through the implementation of three compo-
nents: T1, a secure channel connecting MERS and the
control station application; T2, a secure access layer
for the control station application; and T3, a secure
channel connecting the patient’s mobile device and
the control station application. The potential annota-
tion of G3 may consist of either T2 or T2. In the event
that T1 fails to yield the desired outcome, T3 will be
implemented. In this scenario, the initial EvoSm op-
eration is initiated, resulting in a modification of the
reference goal from 80% to 70%. The occurrence of
the second EvoSm operation is initiated in the event
of T3 failure, resulting in the restoration of the thresh-
old to its previous value.
T1 and T2 have the potential to undergo multi-
ple iterations in a sequential manner, as they await
each other’s completion. In a formal manner, the
annotations of G2 can be represented as (T1; T2)
+ˆ ). In this scenario, the reference security goals
have been adjusted to a lower level, specifically from
90% to 80% and from 80% to 60%, respectively.In
the event that ASm5 and ASm8 experience a failure
lasting in excess of three days, the reference secu-
rity goal will be temporarily relaxed for a duration
of one week. When the occurrence of goal G1 fail-
ing exceeds three times per week in the context of
4
https://www.dropbox.com/scl/fi/0v8995uho1vm3857
nz3pq/Full-model-of-our-case-study.pdf?rlkey=1sjq4s0o0
j4yvof0ha68x32db&dl=0
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
248
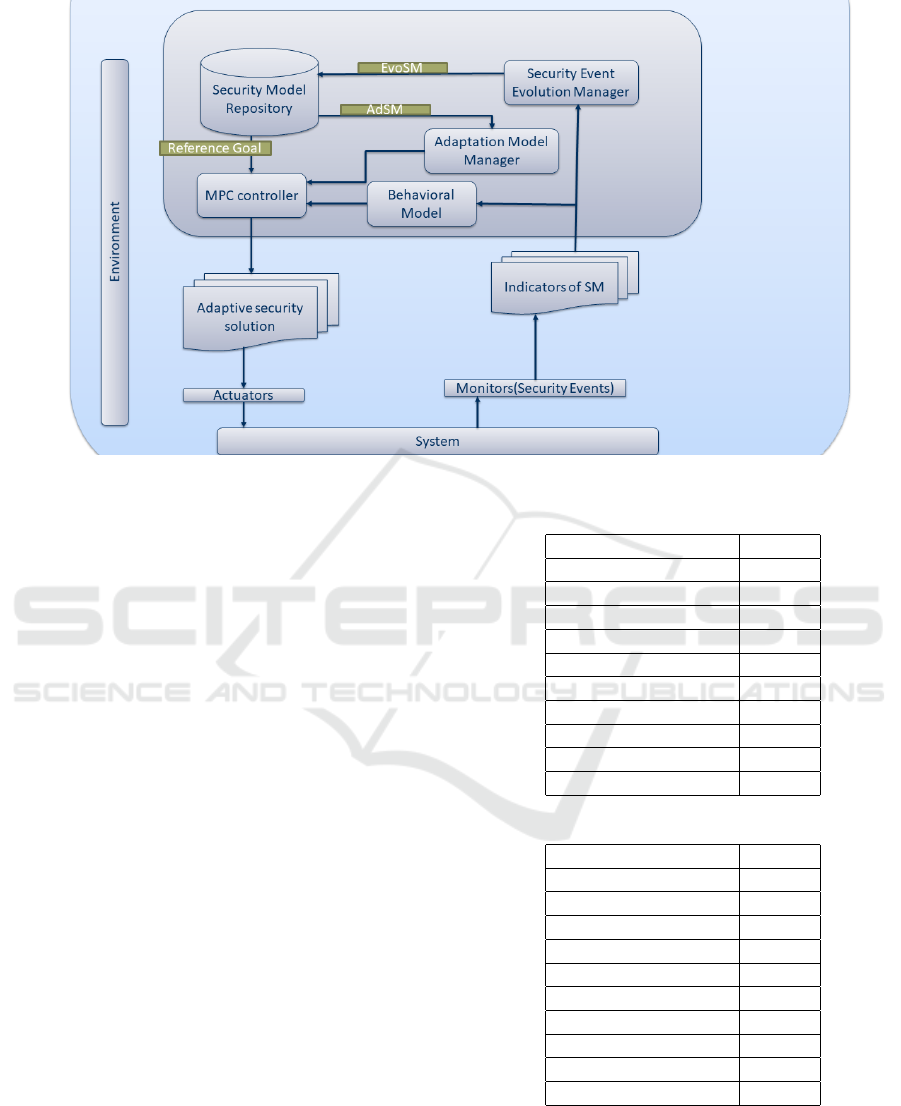
Figure 5: XA4AS.
ASm6, the constraint is consistently modified to four
times per week. In the event that ASm7 experiences a
failure lasting longer than three consecutive days, the
adaptation mechanism will subsequently disregard it
for a period of three days. As a result, the Analytic
Hierarchy Process (AHP) is employed to determine
the weights assigned to each indicator in order to ac-
curately reflect their respective levels of significance.
Typically, critical secuirty goals are given higher pri-
ority than non-critical ones. The weights correspond
to the elements of matrix Q in the cost function. The
controller utilises the optimisation function to identify
an equilibrium state for each goal, allocating greater
resources towards resolving the objectives of higher
significance. Regarding the control parameters, their
weights are determined through empirical elicitation,
with lower weights assigned to the control parameters
that require less frequent tuning. The values of matrix
P in the cost function are weights.
In our (MRES) case study, it has been observed
that the implementation of a secure pipe between the
patient mobile device and the control station applica-
tion (SG6) is a more cost-effective solution compared
to establishing a secure pipe between the hospital
application system and the e-health system (SG10).
Moreover, the former approach also offers the advan-
tage of immediate effectiveness. The priorities for
the indicators of MERS and the weights for control
parameters were obtained through elicitation, as pre-
sented in table 3 and table 4, respectively.
The final set of security goals to be elicited relates
to the adaptive security mechanism (ADSM). The
Table 3: SM Indicators.
Sm Indicators Priority
ISm1 0.20
ISm2 0.4
ISm3 0.4
ISm4 0.08
ISm5 0.2
ISm6 0.05
ISm7 0.3
ISm8 0.18
ISm9 0.16
ISm10 0.5
Table 4: Sm Indicators.
Control Parameter Weight
SG1SG2 1
SG5SG6 1
SG3SG4 1.4
SG7SG8 0.8
SG9SG10 0.6
SG2SG8 1
SG6SG9 1.3
SG10SG3 1
SG8SG2 1.2
SG1SG7 1
achievement of these goals places limitations on the
process of adaptation itself. In the context of Model
Predictive Control (MPC), an Adaptive Horizon De-
termination Strategy (ADSM) is employed to define
the receding horizon of the controller. This strategy
An Automated Adaptive Security Framework for Cyber-Physical Systems
249

determines the time frame within which the adapta-
tion plan should be directed towards in the future. The
term ”ADSM” could also refer to the extent to which
control parameters are permitted to vary.
Ultimately, it is necessary to develop a quanti-
tative model, such as Equation 2. To simulate the
MERS system without natural laws, we ran a lengthy
simulation with frequent changes in control parame-
ters and recorded input and output. We use Matlab
and System Identification toolbox to estimate the an-
alytical model of the system. Although the system
cannot be accurately simulated, the model can be im-
proved during deployment by implementing a learn-
ing mechanism during runtime as shown in Figure 6.
6 BEHAVIORAL MODEL
(RUNTIME)
Developing a comprehensive behavioural model for
highly complex systems such as CPS, characterised
by numerous complicated and diverse states, presents
a significant challenge (Cailliau and van Lamsweerde
et al., 2017). In order to comprehend how attack-
ers achieve their objectives by compromising security
concerns such as confidentiality, integrity, availabil-
ity, and accountability, it is necessary to analyse the
behaviour of the threat environment within the sys-
tem and how adversaries can exploit vulnerabilities.
Once the design phase has been finalised and the sys-
tem has been successfully implemented, the XA4AS
framework, which is focused on control-based secu-
rity goals, can be effectively deployed to serve as the
mechanism for adaptation. The figure presented as
Figure 5 illustrates the five primary components of
XA4AS.
Security Model Repository. The repository is
responsible for storing all the models generated dur-
ing the design phase and sending information to other
components of the framework upon request.
Security Event Evolution Manager. The purpose of
this component is to examine the logs generated by
the monitors with the aim of detecting specific condi-
tions that would initiate EvoSM operations. When a
security objective is substituted, whether on a perma-
nent or temporary basis, it results in the modification
of the security repository.
Adaptation Model Manager. The translation of the
AdSM (Adaptive Security Mechanism) component
into constraints for the optimisation problem of Equa-
tion, as depicted in Figure 3, is performed. These con-
straints pertain to the maximum permissible reduction
or augmentation of a control parameter within a sin-
gle iteration, as well as the weighting assigned to all
indicators and control parameters, as represented by
matrices Q and P. Behavioral Model. The process of
black-box system identification may not always yield
models that accurately represent the behaviour of the
system. Hence, our framework incorporates a learn-
ing component that, through the analysis of imple-
mented modifications and the observed values of in-
dicators resulting from these modifications, iteratively
adjusts the control law to accommodate changes in the
system’s behaviour. This particular component serves
as an instantiation of the Kalman Filter, as elaborated
upon in the preceding section.
MPC Controller. The particulars of this component
have been discussed in the preceding section. In sum-
mary, the MPC controller obtains the reference goal
”R” for each monitored indicator by requesting the se-
curity model repository. The algorithm subsequently
computes the distances between each indicator and its
corresponding reference goal. It then formulates an
adaptation plan that minimises these distances, while
considering the priorities assigned to each indicator.
The objective of this plan is to restore equilibrium,
while adhering to the constraints imposed on the con-
trol parameters. The proposed plan entails modifica-
tions to the control parameters within a predetermined
time frame.
For example in MERS, In the event that ASm5 and
ASm8 experience a failure lasting in excess of three
days, the reference security goal will be temporarily
relaxed for a duration of one week, and The controller
generates a new strategy that aims to predict and ad-
dress potential future failures in a receding horizon
manner.
The iterative adaptation process involving XA4AS
encompasses the subsequent stages in figure 6
• The monitors gather the measurements of all the
indicators of the security mechanism.
• The role of the Security Evolution Manager is to
assess the presence of any event that would initiate
an EvoSm operation. If such an event is identified,
the manager then proceeds to update the evolved
security goal within the security Model Reposi-
tory.
• The Adaptation Model Manager is responsible for
supplying the Model Predictive Control (MPC)
controller with the necessary weights for the indi-
cators and control parameters, as well as the con-
straints for the optimisation problem.
• The Behavioural Component of the Model Pre-
dictive Control (MPC) algorithm uses recent mea-
surements to generate corrected behaviours for the
system.
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
250
• The Model Predictive Control (MPC) controller
uses the current reference goals obtained from the
Security Repository and the corrected model to
generate an updated adaptation plan. This plan
aims to ensure that each indicator value converges
to the reference goal within the prediction hori-
zon.
• The actuators are responsible for implementing
the initial phase of the adaptive security solution
plan onto the system.
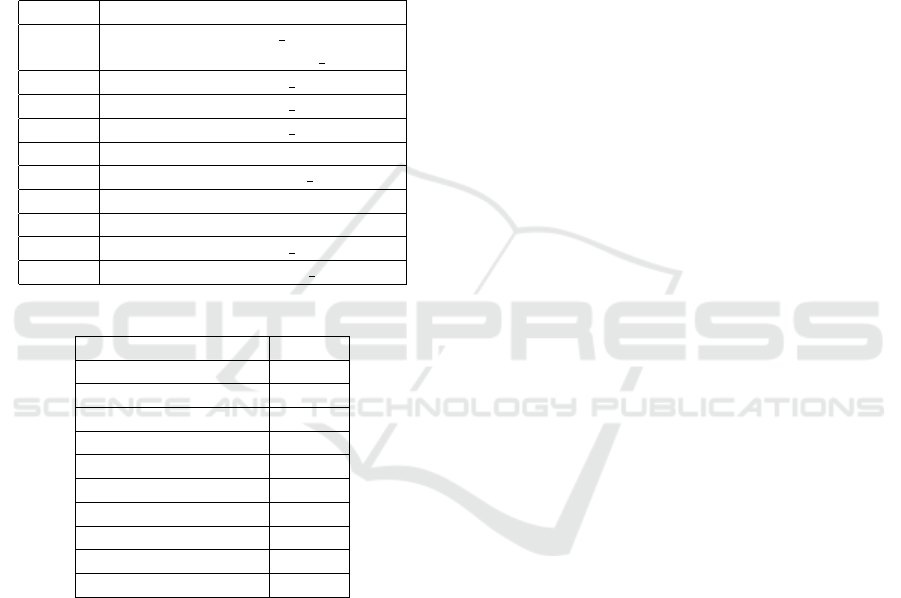
Table 5: EvoSm Operations.
CRq EvoSm Execution
ASm1 Relax(ASm1,ASm1’ 70),
Strengthen(ASm1,ASm1’ 80)
ASm2 Relax (ASm2, ASm2’ 60)
ASm3 Relax (ASm3, ASm3’ 90)
ASm4 Relax (ASm4, ASm4’ 80)
ASm5 Wait( 3 days)
ASm6 Replace (ASm6, ASm6’ 3)
ASm7 Wait 1 week days
ASm8 Wait (3 days)
ASm9 Realx (ASm9, ASm9’ 90)
ASm10 Realx (ASm10, ASm10’ 80)
Table 6: Sm Indicators.
Control Parameter Weight
SG1SG2 1
SG5SG6 1
SG3SG4 1.4
SG7SG8 0.8
SG9SG10 0.6
SG2SG8 1
SG6SG9 1.3
SG10SG3 1
SG8SG2 1.2
SG1SG7 1
7 DISCUSSION
The experiment used a security model with 1,118
components. We created a vulnerability security
model (VM) using the multi-realm security event
monitoring methodology from our earlier work. Ret-
rospective security goal modelling was used to iden-
tify all potential security events in the model. The in-
quiry attempted to assign security indicators to these
events. In result, the framework was used to anal-
yse a security event involving 160 elements in the
Vulnerability Model, including threat targets and as-
sets. The Attack-Mechanism Model included 60 el-
ements, including security goals, tasks, mechanisms,
and domain assumptions. Furthermore, the research
included 1,125 behavioural annotations and found 38
security events. Only 10% of the reported security
incidents were rated critical by the Adaptation man-
ager of XA4AS framework. XA4AS adapts to non-
linear behaviours inherent in the system, an essen-
tial feature. The simulator exploits nonlinear inter-
actions between inputs and outputs for more realistic
behaviour. In practice, most systems have nonlinear
input-output interactions. Thus, an efficient adapta-
tion process must address model defects. In Model
Predictive Control (MPC), the Kalman Filter (KF)
improves model adjustment during system operation,
leading to more accurate predictions.
In the MERS security model scenario, a linear
model predicted system behaviour. However, this
may not always be applicable. For non-linear sys-
tems, tailored models or advanced system identifica-
tion methods can be used (L. Ljung et al., 2010). Non-
linear model predictive control (MPC) formulations
(F.Allgower et al., 2000) can also be used. Our analy-
sis suggests that a bottom-up approach to building the
security model within the framework is effective. The
distinction lies in task definitions within each area.
This allows for the detection of domain-specific at-
tackers. We prioritise threats related to cyber, phys-
ical infrastructure, and social aspects of CPS in our
models.
Furthermore, we analysed the interdependence
of attack models across many domains. The (AM)
approach relies on (VM) to identify vulnerabilities
unique to a specific domain. Once vulnerabilities
are found by (VM), they are used by (AM) to guide
the selection of an acceptable attack strategy. The
technique of selecting this option involves exploiting
known vulnerabilities in the VM. A simulation or his-
torical data is required to create the analytical model
required for XA4AS to function properly. This is a
major shortcoming of the system. Currently, there
are no methods to help system designers simulate a
model that produces data close to the actual system,
making this difficult. This is because CPS lacks its
own methodologies. Our future research is to develop
approaches for security engineers and establish guide-
lines for tuning MPC settings.
8 CONCLUSION
The paper’s primary objective is to provide an exten-
sion of our previous work in the area of security at-
tack event monitoring, with a specific focus on the
Asfalia framework. Another objective is to integrate
the concept of MPC into the design of adaptive se-
An Automated Adaptive Security Framework for Cyber-Physical Systems
251

curity for cyber-physical systems (CPS). Therefore,
we introduce a framework termed XA4AS (Extended
Asfalia (Framework) for Adaptive Security (of Cyber-
Physical Systems). This framework aims to facilitate
the creation of fundamental analytical models for the
deployment of model predictive control and adaptive
security solutions within the domain of CPS.
The aforementioned model demonstrates an ele-
vated degree of accuracy in predicting the behaviour
of the system. Thus, XA4AS is capable of effectively
responding to environmental oscillations and gener-
ating adaptive solutions in a dynamic manner. The
framework was evaluated through the implementation
of the medical emergency response system.
The evaluation findings demonstrate that the ap-
plication of control-theoretic principles can produce
effective adaptation plans for cyber-physical systems,
often surpassing the outcomes achieved through ap-
proaches based solely on human experience. One sig-
nificant advantage of our framework is its ability to
support security analysts in their analysis of security
events and developing adaptive security solutions for
CPS. (VM) is designed to detect and capture both
adversaries and vulnerabilities and later proceeds to
analyse the target of the attack using a realm-specific
methodology.
The Attack Model (AM) is developed by con-
structing a model based on the adversaries that are
specified in the (VM). The behavioural model (BM)
provides annotations for the system behaviours of
the (VM) and the (AM). In the (EM), events are de-
rived from behavioural models. The aforementioned
models are useful inputs for the Security Evolution
Manager and Adaptation Manager components of the
XA4AS framework. The effectiveness of our ap-
proach requires further evaluation through the use of
a larger volume of case studies.
REFERENCES
Griffor, E. R., Greer, C., Wollman, D. A., Burns, M. J.,
et al. (2017). Framework for cyber-physical systems:
Volume 1, overview.
Boyes, H., Hallaq, B., Cunningham, J., and Watson, T.
(2018). The industrial internet of things (iiot): An
analysis framework
Banerjee, A., Venkatasubramanian, K. K., Mukherjee, T.,
and Gupta, S. K. S. (2012). Ensuring safety, security,
and sustainability of mission-critical cyber–physical
systems. Proceedings of the IEEE, 100(1):283–299.
L. Ljung. Approaches to identification of nonlinear sys-
tems. In Control Conference (CCC), 2010 29th Chi-
nese, pages 1–5, July 2010.
M
¨
uller, H., Litoiu, M., and Mylopoulos, J. (2016). Engi-
neering cybersecurity in cyber physical systems. In
Proceedings of the 26th Annual International Confer-
ence on Computer Science and Software Engineering,
pages 316–320. IBM Corp
K. Angelopoulos, V. E. S. Souza, and J. Mylopoulos.
Dealing with multiple failures in zanshin: a control-
theoretic approach. In SEAMS 14, pages 165–174.
ACM, 2014.
Shafi, Q. (2012). Cyber physical systems security: A brief
survey. In 2012 12th International Conference on
Computational Science and Its Applications, pages
146–150. IEEE
Morais, A., Hwang, I., Cavalli, A., and Martins, E. (2013).
Generating attack scenarios for the system security
validation. Networking science, 2(3-4):69–80.
Moore, A. P., Ellison, R. J., and Linger, R. C. (2001) At-
tack modeling for information security and survivabil-
ity. Technical report,
Seid, E., Popov, O., and Blix, F. (2023). Security At-
tack Event Monitoring for Cyber Physical-Systems.
In Mori, P., Lenzini, G., and Furnell, S., editors, Pro-
ceedings of the 9th International Conference on Infor-
mation Systems Security and Privacy, ICISSP 2023,
2023, pages 722–732. SciTePress
Y. Brun, G. Marzo Serugendo, C. Gacek, H. Giese, H.
Kienle, M. Litoiu, H. M¨uller, M. Pezz‘e, and M.
Shaw. Software engineering for self-adaptive sys-
tems. chapter Engineering Self-Adaptive Systems
Through Feedback Loops, pages 48–70. Springer-
Verlag, Berlin, Heidelberg, 2009
A. Filieri, C. Ghezzi, A. Leva, and M. Maggio. Self-
adaptive software meets control theory: A preliminary
approach supporting reliability requirements. In 26th
IEEE/ACM International Conference on Automated
Software Engineering, ASE 2011, pages 283–292,
2011
A. Filieri, H. Hoffmann, and M. Maggio. Automated de-
sign of self-adaptive software with control-theoretical
formal guarantees. In 36th International Conference
on Software Engineering, ICSE ’14, pages 299–310,
2014.
E. Camacho and C. Bordons. Model Predictive Control.
Springer London, 2004.
V. Souza, A. Lapouchnian, and J. Mylopoulos.
Requirements-driven qualitative adaptation. On
the Move to Meaningful Internet Systems: OTM
2012, volume 7565 of Lecture Notes in Computer
Science, pages 342–361. Springer Berlin Heidelberg,
2012.
S.Cheng, D. Garlan, and B. R. Schmerl. Architecture-based
self-adaptation in the presence of multiple objectives.
In Proceedings of the 2006 international workshop on
Self-adaptation and self-managing systems, SEAMS
2006, pages 2–8, 2006.
V. E. S. Souza, A. Lapouchnian, W. N. Robinson, and
J. Mylopoulos. Awareness requirements for adaptive
systems. In 2011 ICSE Symposium on Software En-
gineering for Adaptive and Self-Managing Systems,
SEAMS, pages 60–69, 2011.
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
252

A. Filieri, H. Hoffmann, and M. Maggio. Automated multi-
objective control for self-adaptive software design. In
Proceedings of the 2015 10th Joint Meeting on Foun-
dations of Software Engineering, ESECFSE 2015,
pages 13–24, New York, NY, USA, 2015. ACM.
C. Klein, A. V. Papadopoulos, M. Dellkrantz, J. D¨urango,
M. Maggio, K.-E. °Arz´en, F. Hern´andez-
Rodriguez, and E. Elmroth. Improving cloud service
resilience using brownout-aware load-balancing. In
Reliable Distributed Systems (SRDS), 2014 IEEE
33rd International Symposium
P. Zoghi, M. Shtern, and M. Litoiu. Designing search based
adaptive systems: a quantitative approach. In 9th In-
ternational Symposium on Software Engineering for
Adaptive and Self-Managing Systems, SEAMS 2014,
Proceedings, pages 7–6, 2014.
H. Ghanbari, M. Litoiu, P. Pawluk, and C. Barna. Replica
placement in cloud through simple stochastic model
predictive control. In Cloud Computing (CLOUD),
2014 IEEE 7th International Conference on, pages
80–87, June 2014.
D. Kusic, J. Kephart, J. Hanson, N. Kandasamy, and G.
Jiang. Power and performance management of virtu-
alized computing environments via lookahead control.
In Autonomic Computing, 2008. ICAC ’08. Interna-
tional Conference on, pages 3–12, June 2008.
Q. Zhang, Q. Zhu, M. Zhani, and R. Boutaba. Dy-
namic service placement in geographically distributed
clouds. In Distributed Computing Systems (ICDCS),
2012 IEEE 32nd International Conference on, pages
526–535, June 2012.
Gaggero and Luca Caviglione. 2016. Predictive control
for energy-aware consolidation in cloud datacenters.
IEEE Transactions on Control Systems Technology
24, 2 (Mar. 2016)
Hamoun Ghanbari, Marin Litoiu, Przemyslaw Pawluk,
and Cornel Barna. 2014. Replica placement in cloud
through simple stochastic model predictive control.
In 2014 IEEE 7th International Conference on Cloud
Computing
Dara Kusic, Jeffrey O. Kephart, James E. Hanson, Na-
garajan Kandasamy, and Guofei Jiang. 2009. Power
and performance management of virtualized comput-
ing environments via lookahead control. Cluster Com-
put. 12, 1 (2009)
Nilabja Roy, Abhishek Dubey, and Aniruddha Gokhale.
2011. Efficient autoscaling in the cloud using pre-
dictive models for workload forecasting. In 2011
IEEE International Conference on Cloud Computing
(CLOUD’11). 500–507.
J. Maciejowski. Predictive Control: With Constraints. Pren-
tice Hall, 2002.
K. Angelopoulos, V. E. S. Souza, and J. Mylopoulos. Cap-
turing variability in adaptation spaces: A three-peaks
approach. In Conceptual Modeling – ER 2015. Paul
Johannesson and Mong Li Lee and Stephen W. Liddle
and Oscar Pastor, 2015
J. Karlsson and K. Ryan. A cost-value approach for pri-
oritizing requirements. Software, IEEE, 14(5):67–74,
Sep 1997.
M.Gaggero and L. Caviglione. Predictive control for
energy-aware consolidation in cloud datacenters. Con-
trol Systems Technology, IEEE Transactions on,
pages 1–14, 2015.
Y. Wang and S. Boyd. Fast model predictive control us-
ing online optimization. Control Systems Technology,
IEEE Transactions on, 18(2):267–278, March 2010.
Conway, J. (2016). The industrial internet of things: an evo-
lution to a smart manufacturing enterprise. Schneider
Electric.
Cailliau, A.van Lamsweerde, Runtime monitoring and res-
olution of probabilistic obstacles to system goals.
In Software Engineering for Adaptive and Self-
Managing Systems (SEAMS), 2017 IEEE/ACM
S. J. QinS. J. Qin and T. A. Badgwell. A survey of indus-
trial model predictive control technology. Control en-
gineering practice, 11(7):733–764, 2003.
An Automated Adaptive Security Framework for Cyber-Physical Systems
253
