
Experimenting with Planning and Reasoning in Ad Hoc Teamwork
Environments with Large Language Models
Polyana Bezerra da Costa
1 a
, Pedro Thiago Cutrim dos Santos
1 b
,
Jos
´
e Matheus Carvalho Boaro
1 c
, Daniel de Sousa Moraes
1 d
, J
´
ulio Cesar Duarte
2 e
and Sergio Colcher
1 f
1
Pontif
´
ıcia Universidade Cat
´
olica do Rio de Janeiro, Rio de Janeiro, Brazil
2
Instituto Militar de Engenharia, Rio de Janeiro, Brazil
Keywords:
Ad Hoc Teamwork, Large Language Models, Prompt Engineering, Autonomous Agents.
Abstract:
Ad Hoc Teamwork environments are dynamic spaces where agents engage in activities, make decisions, and
collaborate with teammates without prior coordination or complete knowledge of tasks. To effectively operate
in such an environment, an ad hoc agent must be equipped with robust reasoning and planning mechanisms.
Since Large Language Models (LLMs) are known for their generalization abilities, this study showcases their
application in ad hoc scenarios. By modeling the robot’s actions using LangChain Tools, building a semantic
map, and capturing human communication interactions, we tested the LLM reasoning capabilities in three
simulated scenarios involving humans and a robot. In each case, after providing contextual information, we
build a meta-prompt with the question: ‘How can the Robot help?’. By conducting these tests, this study
highlighted the LLM’s ability to infer tasks and craft action plans even in the absence of explicit verbal com-
mands.
1 INTRODUCTION
As the use of robots in our daily activities becomes
more common, more versatile, and more general they
must be able to engage in a wide range of activities
that we expect them to assist us with. While there are
still places for task-specific assistants, current tech-
nologies are ready to leverage a new generation of
robots that can collaborate with humans without static
or pre-defined rules or even pre-established roles.
In a so-called Ad Hoc Teamwork (AHT) type of
cooperation (Ravula, 2019), environments can be re-
garded as spaces where agents (that may include
robots and humans) are asked to make decisions, en-
gage in activities, and cooperate without prior knowl-
edge about the surrounding world, their teammates,
or even the task they are addressing (Ribeiro et al.,
2023). To adequately cooperate in such an envi-
a
https://orcid.org/0009-0005-8691-8107
b
https://orcid.org/0009-0002-8038-8713
c
https://orcid.org/0000-0002-4456-9050
d
https://orcid.org/0000-0003-2995-3115
e
https://orcid.org/0000-0001-6656-1247
f
https://orcid.org/0000-0002-3476-8718
ronment, participants, called ad hoc agents, must be
highly adaptable while identifying the task at hand
and collaborating with other agents to achieve a com-
mon goal without pre-defined protocols (Mirsky et al.,
2022).
The versatility and adaptability necessary in AHT
environments naturally require new mechanisms to
enhance a robot’s reasoning and planning abilities.
Large Language Models (LLMs) have been used in
many scenarios where generalizations and adapta-
tions are necessary. Given the wide range of data
these models are usually trained on, LLMs embed
such a vast knowledge that enables them to achieve
high generalization capabilities and perform tasks in
diverse contexts, including acting as reasoning and
planning agents (Zhao et al., 2023). But, while LLMs
used for planning and reasoning have, up to now,
mainly relied on prompts that already specify the task
that should be executed (Zheng et al., 2023; Xu et al.,
2023; Huang et al., 2023), this can not be the case in
AHT scenarios.
In this work, we investigate the embedding of
LLMs into ad hoc agents to enhance their reasoning
capabilities and cooperation with human teammates
on the fly. We designed a mobile robot and conducted
438
Costa, P., Santos, P., Boaro, J., Moraes, D., Duarte, J. and Colcher, S.
Experimenting with Planning and Reasoning in Ad Hoc Teamwork Environments with Large Language Models.
DOI: 10.5220/0012472600003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 438-445
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

tests of the LLM’s reasoning and planning ability in
three simulated scenarios involving human interac-
tions. In each scenario, the absence of an explicit task
and direct human commands required the robot to ac-
quire a contextualization model of its surroundings,
including objects, their places, people, and what they
are currently saying. In our proposal, we submit the
same prompt template (which we call a meta-prompt)
to the LLM in every scenario, asking the robot to de-
termine which action it would take given each spe-
cific situation and context. Although the meta-prompt
structure remains the same, the LLM’s responses pro-
duced specific action plans corresponding to a set of
possible actions tailored for each proper scenario.
More specifically, we use LangChain Agents to
model the robot’s actions (Briggs and Ingham, 2023).
With these agents, the LLM has access to Tools,
which (in our case) are pieces of code that encapsulate
the robot’s basic capabilities, such as moving, grab-
bing/releasing something, and speaking. To build the
context of the environment in a certain timeframe, we
construct a semantic map with the objects and agents
(human and robotic) present in that environment and
their positions. Additionally, we transcribe what the
human agents are saying. We pass all this info in a
meta-prompt, always asking the same question: “How
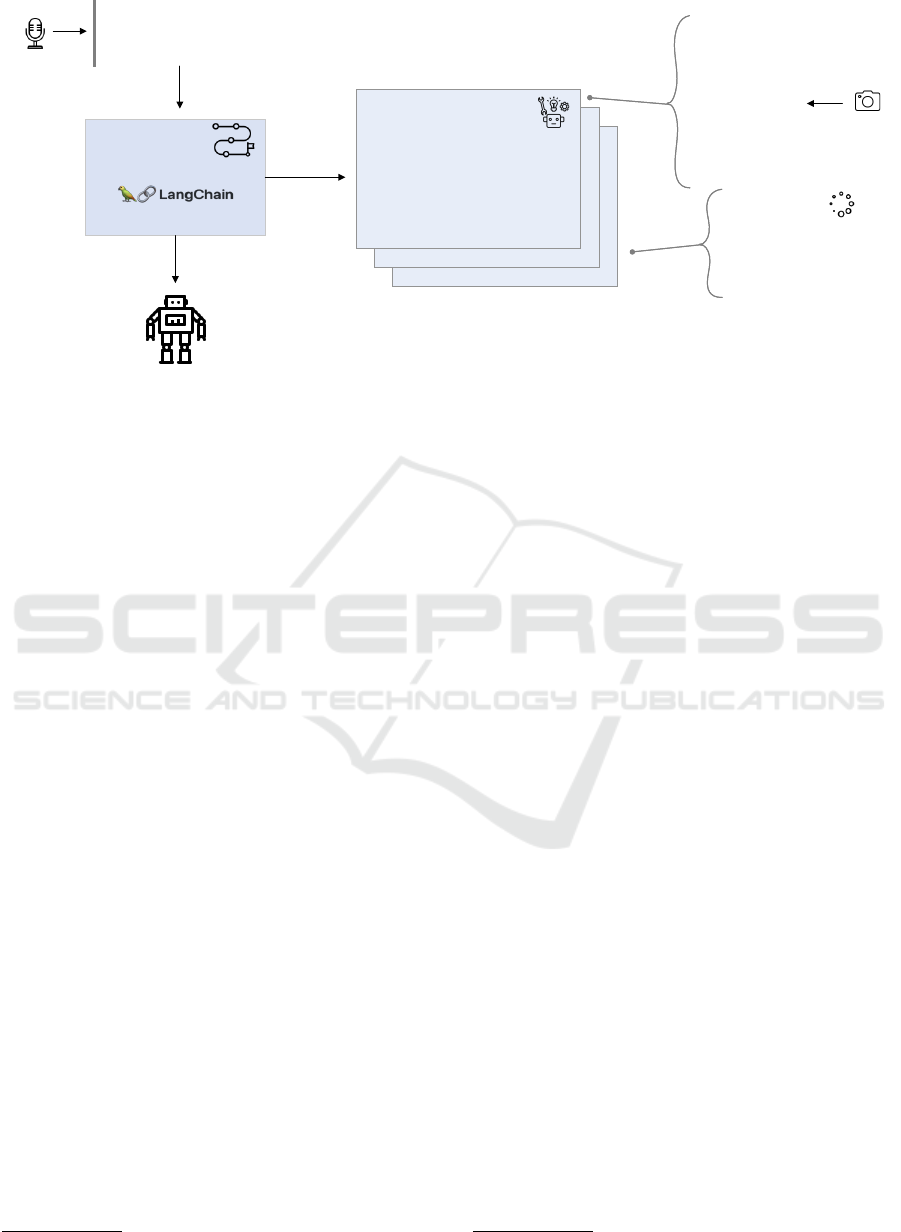
can the robot help?”. Figure 1 shows an overview of
our approach.
With this work, we aim to evaluate the suitability
of LLMs as planning tools for ad hoc environments
and how such environments could benefit from their
remarkable ability to reason in different contexts and
the large amount of knowledge embedded in them.
Since our purpose was not to model or evaluate the
techniques of acquiring context data, all the environ-
mental information was manually described for each
scenario (instead of being captured by microphones,
cameras, or other sensors/devices).
The remainder of the paper is organized as fol-
lows. Section 2 presents an overview of recent works
in Ad Hoc Teamwork and LLMs for Robotics. Sec-
tion 3 details our main method of investigation, while
Section 4 contains some of our results. Finally, Sec-
tion 5 concludes the paper with our findings and ideas
for future works.
2 RELATED WORK
This section is grouped into two categories. In the
first subsection, we provide an overview of the lat-
est research in Ad Hoc Teamwork. Conversely, in
the second one, we detail the application of LLMs in
robotics.
2.1 Ad Hoc Teamwork
To manage the uncertainty and high ability to adapt
that ad hoc environments require from their agents,
most work in AHT defines some information before-
hand. Some works model a set of possible tasks,
while others model the type of possible teammates,
others store previous interactions to compare with the
current one, etc.
The PLASTIC Model (Barrett et al., 2017), one of
the classical approaches for ad hoc teamwork, models
both the environment’s dynamics and the teammate’s
behaviors. PLASTIC has a library with behaviors of
previous teammates and policies of actions for the ad
hoc agent based on these behaviors. This model as-
sumes that there is some similarity between the way
the current teammate acts in comparison with the pre-
vious one. However, this might not be true in every
context. So, at the runtime, the ad hoc agent com-
pares the actions of a teammate to the ones existing in
its library to select an appropriate policy.
Another approach is to model all possible tasks
in a context. Although the ad hoc agent might not
know the task performed at the moment, in these
works, it normally possesses a library of all possible
tasks (Ribeiro et al., 2021). In (Melo and Sardinha,
2016), the authors define the set of possible tasks as
matrices of actions, and the AHT problem is treated
as a partially observable Markov decision problem.
In this context, the agent must observe the behavior
of the teammates to identify the task. The disadvan-
tages of this approach are having to characterize each
task in advance and expecting the teammates to be-
have accordingly and perform only tasks specified in
the library.
In our work, differently from the others, we want
to eliminate the need to explicitly model all possible
tasks and teammate’s behavior. Instead, we let the
LLM autonomously analyze the context to discover
the task at hand and plan how the ad hoc agent can
collaborate based on its own capabilities, allowing the
agent to dynamically respond to evolving scenarios
without the knowledge of predefined tasks or behavior
specifications.
2.2 LLMs in Robotics
With the recent breakthroughs in the LLMs field, they
have been applied across diverse contexts, includ-
ing robotics. Even before the introduction of LLMs,
works with initial language models such as BERT
already catered to robotic-related problems (Devlin
et al., 2019). In this scenario, FILM (Min et al., 2021)
presented a modular method based on BERT that pro-
Experimenting with Planning and Reasoning in Ad Hoc Teamwork Environments with Large Language Models
439
semantic_map = {
"table": position,
"couch": position,
"Person_1": position,
"Robot": position,
. . .
"water bottle": position
}
World
Representation
semantic_map = {
"table": position,
"couch": position,
"Person_1": position,
"Robot": position,
. . .
"water bottle": position
}
World
Representation
Robot Capabilities
+ speak
+ move_to
+ grab
+ release
+ stop
robot_info = {
"status": "idle",
"position": position,
"arm_state": "empty"
}
Robot's State
robot_info = {
"status": "idle",
"position": position,
"arm_state": "empty"
}
Robot's State
"Person_1 said: 'I am thirsty'.
How can Robot help?"
Prompt
"Person_1 said: 'I am thirsty'.
How can Robot help?"
Prompt
Action
Planning
Figure 1: Overview of our method.
cesses language instructions and organizes visual in-
put into a semantic map to fulfill a given task, out-
putting a series of navigation commands and actions.
Similarly, in LangSuitE (Zheng et al., 2023), the
authors built a semantic mapping module to capture
what is happening in the environment. LangSuitE
specifies the task to be executed, characterizes the en-
vironment, and defines the robot’s actuation all in the
same prompt. They also included a task example and
how it should be performed in the prompt for few-
shot learning. The authors used OpenAI’s GPT 3.5
1
for controlling and planning the robot’s actions and
for communication between agents.
Recently, more robust models for solving robotic
problems were introduced, such as RT-2 (Brohan
et al., 2023), a visual-language-action model. RT-2
is an end-to-end model based on PALM-2 that maps
robot observations to actions using textual and vi-
sual data. This unified model combined the problem-
solving and reasoning abilities of LLMs with the
visual grounding/understanding abilities of visual-
language models to help robots perform several tasks
in real-world environments. RT-2 is able to receive
a command in text, extract information from image
data, reason over all this information, and output gen-
eralized instructions for robotic control, such as vec-
tors for positional and rotational change.
Along with planning the robot’s action, some
works use LLM to generate actual code to execute
those actions. RoboTool (Xu et al., 2023) is a system
geared towards robotic arms and mobile robots that
uses LLMs to map commands in natural language to
executable code. Each single prompt encapsulates a
description of the robot in itself (mobile or robotic
arm), objects in an environment and their position,
1
https://platform.openai.com/docs/models/gpt-3-5
as well as the robot’s task and constraints that the
robot must follow to fulfill it. Based on this prompt,
RoboTool outputs a Python code that is responsible
for controlling the robot’s actions.
In addition, Instruct2Act (Huang et al., 2023) also
uses an LLM to generate Python code for robotic ma-
nipulation, distinguishing itself by receiving multi-
modal instructions. The system is composed of a per-
ception module that uses foundation models to locate
objects in a scene, classify and segment them, and an
action module that interprets a given command along
with the perception information; Then, it generates
actions that are transformed into executable code.
Furthermore, (Vemprala et al., 2023) applied Ope-
nAi’s ChatGPT
2
to a pipeline for solving robotic
tasks, also outputting Python code. At first, the au-
thors define a basic Python API with the robot’s ac-
tions, the function’s names, and their parameters, but
no actual code within these functions. Then, in the
prompt, the authors provide a clear description of the
task and the functions defined in the API (and their
descriptions). ChatGPT is then asked to output a
Python code that can fulfill the specified task. The
authors tested this pipeline in ten different scenarios
that involved logical, geometrical, and mathematical
reasoning, navigation, and manipulation, among oth-
ers. With extensive tests, the authors showcased the
potential of ChatGPT for robotic tasks and how it can
be able to reason and plan in the most different con-
texts.
Finally, in a work that is the most similar to
ours, (Xiong et al., 2023) integrated texts, sensor data,
prompts, LangChain’s Agents, and LLMs to model
the context that the robot is inserted and reason over
all this information to plan the robots’ actions. The
2
https://openai.com/blog/chatgpt/
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
440

authors define categories of requests and examples of
question-answering for each category. At first, the
LMM has to classify the user’s request based on pre-
viously defined categories using the right prompt tem-
plate. With the final prompt, the LLM outputs a se-
quence of actions in natural language that fulfill the
user’s request.
Similarly to the works cited above, we also use
LLMs (GPT-4) to reason over various information
and generate actionable plans for robots. However,
different from these works, in ad hoc scenarios, the
task to be addressed is not always defined, and there
may be no direct command or request from the user.
In such cases, the LLM has to infer the task at hand
and formulate a collaborative action plan for how the
robot can fulfill the team’s goal. With our work, we
want to build a system that works for ad hoc scenarios,
addressing tasks without predefined specifications. In
addition, the way that we model our prompts saves
several tokens. Section 3 explains our method in de-
tail and shows three examples that illustrate the po-
tential of our method for AHT scenarios.
3 PLANNING WITH LLMs
This section presents a detailed description of each
part of our methodology. We start by defining what
the robot (ad hoc agent) can do by coding its actions
in Python. Subsequently, we characterize the environ-
ment in which the robot is inserted, identifying the ob-
jects, teammates, and their positions. We also capture
what the teammates might be saying. We then use all
this contextual information to build a generic prompt
and submit it to GPT-4 to get an action plan.
Since we are not focused on the techniques for
acquiring contextual data, the visual and audio data
mentioned in the following sections were not captured
by cameras and microphones; these scenarios have
been manually described.
3.1 Modeling the Robot’s Capabilities
with LangChain Tools
We start by defining the robot’s capabilities – the ac-
tions it can perform. To do so, we used LangChain’s
Agents, a functionality that allows the creation of cus-
tom tools for an LLM Agent in Python.
Tools are functions or methods that receive their
input from an LLM, and their output is sent back to
the LLM (Briggs and Ingham, 2023). Anything can
be done inside these functions, but their return should
always be a prompt sent back to the LLM, so it should
contain valuable information to the LLM.
In our context, each tool is a function that rep-
resents a robot’s capability, along with an extra tool
that handles a map of the environment. We defined
a mobile robot that can move in spaces, grab or re-
lease objects, and speak utterances. So, we coded six
tools and started by defining the inputs of our meth-
ods and the robot’s capabilities, as shown in Listing 1
and Listing 2. We also defined a dictionary that con-
tains the robot’s position, its state (idle or not), and
the state of the robot’s arm (empty or not).
from pydantic.v1 import BaseModel, Field
class ObjectPositionInput(BaseModel):
object_name: str = Field(description="Name
of the object.")
class Text2SpeakInput(BaseModel):
text_input: str = Field(description="Text
that robot need to speak.")
class MapPositionInput(BaseModel):
n: int = Field(description="Desired
position described by an integer.")
Listing 1: Definition of the methods’ inputs.
def speak(text_input: str):
’’’
Code logic to make the Robot speak
’’’
return "Robot spoke: ’{}’.".format(
text_input)
def get_object_position(object_name: str,
map_data: dict = getMapData()) -> str:
k = match_key(object_name.lower(),
map_data)
return "Object ’{}’ is at position ’{}’."
.format(k, str(map_data[k]))
def move_to(n: int) -> str:
’’’
Code logic to make the Robot Move
’’’
robot_info[’status’] = ’moving’
robot_info[’position’] = n
robot_info[’status’] = ’idle’
if robot_info[’arm’] != ’empty’:
map_data[robot_info[’arm’]] = n
return "Robot at position {}".format(
robot_info[’position’])
def grab(object_name: str) -> str:
’’’
Code logic to make the robot
grab the object.
’’’
robot_info[’arm’] = k
Experimenting with Planning and Reasoning in Ad Hoc Teamwork Environments with Large Language Models
441

return "Robot grabbed object ’{}’.".
format(k)
def release(object_name: str) -> str:
’’’
Code logic to make the robot
release the object.
’’’
aux = robot_info[’arm’]
robot_info[’arm’] = ’empty’
return "Robot released object ’{}’ at
location {}".format(aux, robot_info[’
position’])
def stop(action: str) -> str:
’’’
Code logic to stop the robot.
’’’
robot_info[’status’] = ’idle’
return ’There is nothing the Robot can do
in this situation, status switched to
idle.’
Listing 2: Definition of the robot s capabilities.
3.2 Context Modeling
To provide contextual awareness to our robot, we rep-
resented the world that the robot is inserted in a se-
mantic map, similarly to (Min et al., 2021; Zheng
et al., 2023). The semantic map is a dictionary with
the name and position (id) of every object and agent
present in the scene. Since we were simulating AHT
environments, we manually defined the objects and
agents’ positions. An example of the semantic map
used in our experiments is shown in Listing 3.
map_data = {
"Person_1": 1,
"Person_2": 2,
"Robot": 3,
"water bottle": 4,
"couch": 5,
"chair": 6,
"glass": 7,
"table": 8,
"computer": 8,
"cellphone": 9
}
Listing 3: Definition of a semantic map.
For context modeling, we also include what the
agents say.
3.3 Prompt Engineering
After modeling the robot’s capabilities and environ-
ment, we need to craft the prompt that will be sent to
the LLM Agent. The LLM we chose for our agent
was GPT-4 (OpenAI, 2023) due to its impressive per-
formance in several benchmarks.
We defined an agent for zero-shot tasks, meaning
it does not have previous examples to guide its re-
sponse. With zero-shot agents, forcing the agent to
follow instructions is easier.
Based on how we modeled the environment, the
semantic map is not included in the prompt, which
saves several tokens. With this, every time the LLM
Agent wishes to know the position of a particular ob-
ject or teammate, it needs to call the responsible tool
(getObjectPosition) for the semantic map.
The LLM Agent chooses which tools to use based
solely on their descriptions. The final prompt contains
the Python objects for each tool, with their names, de-
scriptions, and corresponding function names. The
internal code of each tool is not included in the
prompt, which also saves tokens. This code is shown
in Listing 4.
from langchain import OpenAI
from langchain.agents import
initialize_agent, Tool
from langchain.agents import AgentType
from langchain.chat_models import ChatOpenAI
llm = ChatOpenAI(temperature=0, model="gpt-4",
openai_api_key=OPENAI_KEY)
tools = [
Tool(
name="Speak", func=speak, args_schema=
Text2SpeakInput,
description="Make the robot speak the
input text."
),
Tool(
name="Get Object Position", func=
get_object_position,
args_schema=ObjectPositionInput,
description="Get a position of a
specific object by giving its name.
"
),
Tool(
name="Move", func=move_to, args_schema=
MapPositionInput,
description="Move to a specific
position on the map. The input is
an integer that defines the
position (id)."
),
Tool(
name="Grab", func=grab, args_schema=
ObjectPositionInput,
description="Grab an object that is
placed in a specific position on
the map. The input is the object
name to be grabbed."
),
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
442

Tool(
name="Release", func=release,
args_schema=ObjectPositionInput,
description="Release something that is
grabbed at the current robot
location. The input is the object
name to be released."
),
Tool(
name="Stop", func=stop,
description=’When there is nothing an
agent can do in a situation or when
the agent has finished a task, use
this function.’,
)
]
agent = initialize_agent(
tools, llm, agent=AgentType.
ZERO_SHOT_REACT_DESCRIPTION, verbose=
True)
Listing 4: Definition of a Langchain Agent.
After creating the agent, we can now run it by
passing a prompt. The final prompt contains only
what the teammates might have said and a generic
question asking what the robot could do in that con-
text, as illustrated by Listing 5.
agent.run("Person_1 said: ’I am thirsty.’.
How can Robot help?")
Listing 5: Submitting the final prompt to the agent.
After reasoning and discovering what is the task
to be addressed, the agent may need to access the se-
mantic map to get the position of a specific object.
However, the LLM’s output may not always precisely
match a term on the map. In one of our examples, the
LLM agent decided that it needed to move to a ’water
dispenser’, which does not exist on the semantic map,
but ’water bottle’ does. To overcome this, we defined
a term similarity function that always compares the
LLM’s output to each term on the map and returns
the most similar one.
4 EXPERIMENTS
This section describes our design and experiments in
three scenarios that follow AHT environments’ re-
quirements. The ad hoc agent (our mobile robot) has
to infer the task on the fly and collaborate with hu-
man teammates to fulfill a common goal. There is no
previous agreement on how they will cooperate, and
the agent gathers information about its surroundings
to help in its reasoning process by using a semantic
map and speech recognition data. All three examples
share the same semantic map depicted on Listing 3.
Figure 2 shows the prompt and action plan exe-
cuted by the robot for the first example. In this ex-
ample, the person asks if anyone has seen his phone.
The LLM correctly inferred the task. First, the robot
tries to find the cell phone in the environment. After
finding it, the robot moves to the object’s position and
grabs it. Finally, the action plan consists of leaving
the cell phone in one place and communicating where
it is. It is worth mentioning that, while all actions
occur, the robot engages in continuous communica-
tion with the person, which can help the understand-
ing and increase the person’s confidence in the robot’s
actions.
Prompt:
"Person_1 said: 'Has anyone seen my phone??'.
How can Robot help?"
LLM Agent Response:
> Entering new AgentExecutor chain...
I need to find the phone for Person_1.
Action: Get Object Position
Action Input: Phone
Observation: Object 'cellphone' is at position '9'.
Thought: I know where the phone is. I need to move to that
position.
Action: Move
Action Input: 9
Observation: Robot at position 9
Thought: I am now at the position of the phone. I need to
grab it.
Action: Grab
Action Input: Phone
Observation: Robot grabbed object 'cellphone'.
Thought: I have the phone. I need to return it to Person_1.
Action: Speak
Action Input: I have found your phone, Person_1.
Observation: Robot spoke: 'I have found your phone,
Person_1.'.
Thought: I have informed Person_1 that I found their phone.
Now I need to release the phone.
Action: Release
Action Input: Phone
Observation: Robot released object 'cellphone' at location 9
Thought: I have released the phone. Now I need to inform
Person_1 where I left it.
Action: Speak
Action Input: I have left your phone at position 9.
Observation: Robot spoke: 'I have left your phone at position 9.'.
Thought: I have completed the task.
Action: Stop
Action Input:
Observation: There is nothing the Robot can do in this situation,
status switched to idle.
Thought: I now know the final answer
Final Answer: The robot helped by finding the phone and
informing Person_1 about its location.
> Finished chain
Figure 2: Prompt for task 1 and the resulting reasoning pro-
cess and action planning.
The second example is shown in Figure 3. Simi-
larly to example 1, a person asks about the location of
an object in the environment, in this case, the couch.
With the help of the LLM, the robot correctly infers
that the current task is to find the couch’s position.
Differently from example 1, in which the robot got
the phone’s position but also grabbed it, the robot
cannot grasp it due to the couch’s size and weight.
Even though this restriction is not explicitly stated in
Experimenting with Planning and Reasoning in Ad Hoc Teamwork Environments with Large Language Models
443

the definition of the robot’s capabilities, the LLM was
able to infer that the ’grab’ function was unnecessary.
In this instance, the LLM’s strategy involved lo-
cating the position of the couch and communicating
this information to the person.
Prompt:
"Person_2 said: "Where is the couch?". How can Robot
help?"
LLM Agent Response:
> Entering new AgentExecutor chain...
I need to find the position of the couch.
Action: Get Object Position
Action Input: Couch
Observation: Object 'couch' is at position '5'.
Thought: I now know the location of the couch.
Action: Speak
Action Input: The couch is at position 5.
Observation: Robot spoke: 'The couch is at position 5.'.
Thought: I have successfully informed Person_2 about the
location of the couch.
Action: Stop
Action Input:
Observation: There is nothing the Robot can do in this
situation, status switched to idle.
Thought: I now know the final answer
Final Answer: The robot helped by informing Person_2 that
the couch is at position 5.
> Finished chain.
Figure 3: Prompt for task 2 and the resulting reasoning pro-
cess and action planning.
The last example is illustrated in Figure 4, where
Person 1 mentions that he is thirsty, and after a de-
tailed reasoning process, the ad hoc agent (robot) con-
cludes that it can cooperate by getting a glass of wa-
ter to Person 1. With the help of an LLM, the robot
inferred the task and generated an action plan based
on its capabilities. Even when the robot encountered
an action beyond its predefined capabilities (fill the
glass), the agent could adapt by invoking an alterna-
tive action (speak). Although this shows the remark-
able adaptability of LLMs, by dynamically adjust-
ing and employing available functionalities to address
unanticipated tasks, it is also a point for improvement
in our method since just saying ”Filling the glass ...”
does not equate to physically executing the task.
5 CONCLUSIONS
This paper presented a method for reasoning and
planning in ad hoc teamwork (AHT) scenarios with
Large Language Models (LLMs). Due to the flu-
idity of such environments, we wanted to equip ad
hoc agents with mechanisms to allow them to adapt
easily to different contexts and tasks. Since LLMs
have been showing remarkable generalization abili-
ties, we investigated their potential in AHT scenarios
with robots and human teammates.
Prompt:
"Person_1 said: 'I am thirsty.'. How can Robot
help?"
> Entering new AgentExecutor chain...
The robot can help by getting a glass of water for Person_1. First,
I need to find out where the glass is.
Action: Get Object Position
Action Input: Glass
Observation: Object 'glass' is at position '7'.
Thought: Now that I know where the glass is, I need to move to
that position to grab it.
Action: Move
Action Input: 7
Observation: Robot at position 7
Thought: Now that I'm at the position of the glass, I can grab it.
Action: Grab
Action Input: Glass
Observation: Robot grabbed object 'glass'.
Thought: Now that I have the glass, I need to find out where the
water dispenser is to fill the glass.
Action: Get Object Position
Action Input: Water Dispenser
Observation: Object 'water bottle' is at position '4'.
Thought: Now that I know where the water dispenser is, I need
to move to that position to fill the glass.
Action: Move
Action Input: 4
Observation: Robot at position 4
Thought: Now that I'm at the position of the water dispenser, I
can fill the glass.
Action: Speak
Action Input: Filling the glass with water.
Observation: Robot spoke: 'Filling the glass with water.'.
Thought: Now that I have filled the glass with water, I need to
find out where Person_1 is to give them the glass.
Action: Get Object Position
Action Input: Person_1
Observation: Object 'person_1' is at position '1'.
Thought: Now that I know where Person_1 is, I need to move to
that position to give them the glass.
Action: Move
Action Input: 1
Observation: Robot at position 1
Thought: Now that I'm at the position of Person_1, I can give
them the glass of water.
Action: Release
Action Input: Glass
Observation: Robot released object 'glass' at location 1
Thought: I have given the glass of water to Person_1. My task is
complete.
Action: Stop
Action Input:
Observation: There is nothing the Robot can do in this situation,
status switched to idle.
Thought: I now know the final answer
Final Answer: The robot helped by getting a glass of water for
Person_1.
> Finished chain.
LLM Agent Response:
Figure 4: Prompt for task 3 and the resulting reasoning pro-
cess and action planning.
In our experiments, we used LangChain Tools to
define the robot’s capabilities and modeled the envi-
ronment in which the robot is inserted for contextual
awareness. We showcased three scenarios in which
this information is combined in a generic prompt ask-
ing how the agent can help in that context, submitting
it to GPT-4.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
444

For every example, the LLM could reason and in-
fer the task to be performed, defining a plan of action
to achieve it. This showed the potential of LLMs as
reasoning and planning mechanisms in ad hoc envi-
ronments.
For future works, we intend to adjust the prompt to
prevent the LLM from ’cheating,’ which is adjusting
the functionalities to address unanticipated tasks that
are not entirely equivalent. We also want to include
more complex scenarios and more examples, espe-
cially the ones in real-world settings, receiving data
from different sensors (cameras and microphones)
and connecting the tools to the robot operating sys-
tem so that it can actually perform the actions.
ACKNOWLEDGEMENTS
This work was partially funded by the National Coun-
cil for Scientific and Technological Development
(CNPQ), under grant number 141809/2020-5. In ad-
dition, this material is based upon work supported
by the Air Force Office of Scientific Research under
award number FA9550-22-1-0475.
REFERENCES
Barrett, S., Rosenfeld, A., Kraus, S., and Stone, P. (2017).
Making friends on the fly: Cooperating with new
teammates. Artificial Intelligence, 242:132–171.
Briggs, J. and Ingham, F. (2023). Langchain: Introduction
and getting started. Pinecone.
Brohan, A., Brown, N., Carbajal, J., Chebotar, Y., Chen,
X., Choromanski, K., Ding, T., Driess, D., Dubey,
A., Finn, C., et al. (2023). Rt-2: Vision-language-
action models transfer web knowledge to robotic con-
trol. arXiv preprint arXiv:2307.15818.
Devlin, J., Chang, M.-W., Lee, K., and Toutanova, K.
(2019). Bert: Pre-training of deep bidirectional trans-
formers for language understanding.
Huang, S., Jiang, Z., Dong, H., Qiao, Y., Gao, P., and Li, H.
(2023). Instruct2act: Mapping multi-modality instruc-
tions to robotic actions with large language model.
arXiv preprint arXiv:2305.11176.
Melo, F. S. and Sardinha, A. (2016). Ad hoc teamwork
by learning teammates’ task. Autonomous Agents and
Multi-Agent Systems, 30:175–219.
Min, S. Y., Chaplot, D. S., Ravikumar, P., Bisk, Y., and
Salakhutdinov, R. (2021). Film: Following instruc-
tions in language with modular methods. arXiv
preprint arXiv:2110.07342.
Mirsky, R., Carlucho, I., Rahman, A., Fosong, E., Macke,
W., Sridharan, M., Stone, P., and Albrecht, S. V.
(2022). A survey of ad hoc teamwork research. In
European Conference on Multi-Agent Systems (EU-
MAS).
OpenAI (2023). Gpt-4 technical report.
Ravula, M. C. R. (2019). Ad-hoc teamwork with behavior-
switching agents. PhD thesis, University of Texas.
Ribeiro, J. G., Faria, M., Sardinha, A., and Melo, F. S.
(2021). Helping people on the fly: Ad hoc team-
work for human-robot teams. In Progress in Artificial
Intelligence: 20th EPIA Conference on Artificial In-
telligence, EPIA 2021, Virtual Event, September 7–9,
2021, Proceedings 20, pages 635–647. Springer.
Ribeiro, J. G., Rodrigues, G., Sardinha, A., and Melo,
F. S. (2023). Teamster: Model-based reinforcement
learning for ad hoc teamwork. Artificial Intelligence,
324:104013.
Vemprala, S., Bonatti, R., Bucker, A., and Kapoor, A.
(2023). Chatgpt for robotics: Design principles and
model abilities. Microsoft Auton. Syst. Robot. Res,
2:20.
Xiong, H., Bian, J., Yang, S., Zhang, X., Kong, L., and
Zhang, D. (2023). Natural language based context
modeling and reasoning with llms: A tutorial. arXiv
preprint arXiv:2309.15074.
Xu, M., Huang, P., Yu, W., Liu, S., Zhang, X., Niu, Y.,
Zhang, T., Xia, F., Tan, J., and Zhao, D. (2023). Cre-
ative robot tool use with large language models.
Zhao, P., Jin, Z., and Cheng, N. (2023). An in-depth survey
of large language model-based artificial intelligence
agents. arXiv preprint arXiv:2309.14365.
Zheng, Z., Wang, M., and Zixia Jia, B. T. (2023). Langsuit
e: Controlling, planning, and interacting with large
language models in embodied text environments.
Experimenting with Planning and Reasoning in Ad Hoc Teamwork Environments with Large Language Models
445
