
VOEDHgesture: A Multi-Purpose Visual Odometry/ Simultaneous
Localization and Mapping and Egocentric Dynamic Hand Gesture
Data-Set for Virtual Object Manipulations in Wearable Mixed Reality
Yemineni Ashok
a
, Mukesh Kumar Rohil
b
, Kshitij Tandon
c
and Harshil Sethi
d
Birla Institute of Technology And Science, Pilani (BITS Pilani), Pilani, Rajasthan, India
Keywords:
Visual Odometry, Wearable Computing, Augmented Reality, Mixed Reality, Pose Estimation,
Simultaneous Localization and Mapping.
Abstract:
Visual Odometry/ Simultaneous Localization and Mapping (VO/ SLAM) and Egocentric hand gesture recog-
nition are the two major technologies for wearable computing devices like AR (Augmented Reality)/ MR
(Mixed Reality) glasses. However, the AR/MR community lacks a suitable dataset for developing both hand
gesture recognition and RGB-D SLAM methods. In this work, we use a ZED mini Camera to develop chal-
lenging benchmarks for RGB-D VO/ SLAM tasks and dynamic hand gesture recognition. In our dataset
VOEDHgesture, we collected 264 sequences using a ZED mini camera, along with precisely measured and
time-synchronized ground truth camera positions, and manually annotated the bounding box values for the
hand region of interest. The sequences comprise both RGB and depth images, captured at HD resolution
(1920 × 1080) and recorded at a video frame rate of 30Hz. To resemble the Augmented Reality environ-
ment, the sequences are captured using a head-mounted ZED mini camera, with unrestricted 6-DOF (degree
of freedom) movements in different varieties of scenes and camera motions, i.e. indoor, outdoor, slow motion,
quick motions, long trajectories, loop closures etc. This dataset can help researchers to develop and promote
reproducible research in the fields of egocentric hand tracking, visual odometry/SLAM and computer vision
algorithms for AR scene reconstruction and scene understanding, etc.
1 INTRODUCTION
Wearable computing moves the computation from
desktop computers to body-worn devices and allows
the user to interact with computation units when-
ever and wherever it is needed. Augmented Real-
ity (AR)/ Mixed Reality (MR) Glasses are one cate-
gory of wearable computers which extend the human-
computer interface by presenting the computer’s dig-
ital information on the surrounding physical world’s
video. AR/MR Glasses have video cameras to cap-
ture the surrounding real-world video and process-
ing power to overlay the graphical content in the sur-
rounding real-world video in physically meaningful
locations. Furthermore, within this AR-enhanced vi-
sualization context, the graphical content can be in-
teractive and manipulative with proper user interfaces
a
https://orcid.org/0000-0002-5550-5159
b
https://orcid.org/0000-0002-2597-5096
c
https://orcid.org/0009-0007-1105-7853
d
https://orcid.org/0009-0001-9859-3662
and interaction techniques.
Developing robust AR/MR systems that are able
to perform virtual content manipulations in response
to human gestures is one of the major challenges
in computer vision tasks. The AR/MR systems
evaluation mostly relies on the performance of vi-
sual odometry and hand gesture recognition modules.
Hence, in recent years an increasing number of bench-
marks such as KITTI (Geiger et al., 2013), RGB-
D SLAM (Sturm et al., 2012), EuRoC MAV dataset
(Burri et al., 2016), PennCOSYVIO dataset (Pfrom-
mer et al., 2017), Newer College’s Stereo Vision Li-
dar IMU Dataset (Ramezani et al., 2020), Newer Col-
lege’s Multicam Vision LiDAR IMU dataset (Zhang
et al., 2021), Interactive Museum nvGesture(Baraldi
et al., 2014), nvGesture(Molchanov et al., 2016), Ego-
centricGesture(Zhang et al., 2018) etc. have been in-
troduced for benchmarking and to achieve better per-
formance levels in Visual odometry systems and hand
gesture recognition systems. However, most of these
datasets are specific to the evaluation of either visual
odometry tasks or hand gesture recognition tasks.
1336
Ashok, Y., Rohil, M., Tandon, K. and Sethi, H.
VOEDHgesture: A Multi-Purpose Visual Odometry/ Simultaneous Localization and Mapping and Egocentric Dynamic Hand Gesture Data-Set for Virtual Object Manipulations in Wearable
Mixed Reality.
DOI: 10.5220/0012473900003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 1336-1344
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

1.1 Visual Odometer: A “Basic
Problem” for Markerless AR
The visual odometry (VO) process measures the
agent’s (e.g. human, vehicle, robot etc.) egocen-
tric motion by analysing the input of single or mul-
tiple cameras fixed to it. VO/SLAM can be applied
in various such as wearable computing, robotics, Au-
tonomous vehicles, Micro Aerial Vehicles (MAV),
etc. Wearable AR glasses can display the computer’s
graphical content on real-world video in meaningful
full locations, provided that it has the knowledge of
where the user is looking. In a localized and relative
sense, the determination of tracking and mapping of
the camera over a period of time is the major module
in the visual odometry framework, and these track-
ing and mapping calibrations can help in estimating
the orientation of the virtual content in every video
frame.
Various devices and equipment like RGB-D cam-
eras, such as Microsoft Kinect, Intel RealSense,
Stereolab’s ZED, etc., can significantly help to push
the evaluation of benchmark’s state-of-the-art for-
ward. RGB-D cameras provide the 3D structure of
the environment in addition to texture information,
and these depth maps help simplify the complexities
involved in SLAM’s initialization process. In this
paper, we utilize one of the recent RGB-D cameras,
ZED mini, to capture real-world scenes.
1.2 Hand Gesture Recognition: A Basic
Problem in Human Wearable
Computer (AR/MR) Interaction
Hand gestures are the natural and intuitive way to in-
teract with wearable computers like AR/MR glasses.
AR/MR glasses can capture hand gestures with a
head-mounted camera. This captured video intro-
duces a distinct human-centric perspective of the sur-
rounding visual world, thereby exhibiting new hand
gesture recognition system characteristics 1) Egocen-
tric motion: As the camera is attached to the user’s
head as in figure 1, the camera motion can be signifi-
cantly affected by quick and sudden head motions, es-
pecially when the user performs gesture while walk-
ing. 2) Hands in short-range: Hands could partly or
fully be out of video frames because of the close prox-
imity between the camera and hand.
Currently, it is difficult to find a benchmark dataset
that can be useful in developing both camera pose es-
timation and ego-centric dynamic hand gesture recog-
nition methods. Most of the hand gesture recognition-
related datasets provide bounding boxes and labels
Figure 1: (Middle) Recording platform (A subject with
a head-mounted camera for capturing the hand gestures),
RGB (left-top) and depth (left-bottom) images generated by
the ZED camera, trajectory (Right top) and bounding box
labels (Right bottom).
for action recognition, sign language understanding,
and hand detection tasks only. They do not explic-
itly provide any ground truth trajectory calibrations
for camera pose estimation. The datasets like Inter-
active Museum (Baraldi et al., 2014) and Egocen-
tricGesture (Zhang et al., 2018) are the two public
datasets available for the evaluation of egocentric ges-
ture recognition tasks. However, these datasets pro-
vide only the spatial and temporal-related information
between the frames for human-computer interaction
tasks. In summary, we take advantage of a Visual in-
ertial stereo ZED mini camera to develop novel chal-
lenging benchmarks for visual odometry/SLAM and
egocentric dynamic hand gesture recognition. The
major contributions of this work include:
1. In this paper, we provide 264 real RGB-D ego-
centric hand gesture sequences that are captured
in various illumination conditions like in outdoor
sunlight, indoor sunlight, nighttime in artificial
light, and time in dim lighting conditions, along
with the trajectory of ground truth to fully quan-
tify the accuracy of a given VO/SLAM system.
2. This dataset sequence consists of 40 basic dy-
namic or static hand gesture classes that are useful
for hand gesture recognition tasks for controlling
virtual content manipulations. These are collected
from 25 human subjects of varied age groups and
genders and in various illumination conditions,
e.g., daytime, nighttime with artificial light, and
evening with light illuminations.
3. We show the performance analysis on traditional
as well as recent RGB-D SLAM models and hand
gesture recognition models.
With all these novelties, our VOEDHgesture dataset
is the first of its kind to be useful for developing two
basic modules e.g. tracking and interaction of wear-
able AR/MR glasses.
VOEDHgesture: A Multi-Purpose Visual Odometry/ Simultaneous Localization and Mapping and Egocentric Dynamic Hand Gesture
Data-Set for Virtual Object Manipulations in Wearable Mixed Reality
1337

Table 1: Comparison of Related Data sets and Benchmarks.
Dataset Sensors Scenario Type Platform Size
New College Data set (Smith et al., 2009) Stereo camera Outdoor Real Robot 1 sequence
KITTI (Geiger et al., 2012) Stereo Camera Outdoor Real car 22 sequences
RGB-D SLAM (Sturm et al., 2012) RGB-D camera Indoor Real Robot/ Handheld 39 sequences
ICL-NUIM (Handa et al., 2014) RGB-D Camera Indoor Synthetic Handheld 8 sequences
KITTI (Geiger et al., 2013) Stereo Camera Dynamic outdoor Real car 400 Scenes
TUM-mono-VO dataset (Engel et al., 2016) Monocular camera Indoor& Outdoor Real Handheld 50 Sequences
EuRoC MAV dataset (Burri et al., 2016) stereo Camera, IMU Machine hall& Room Real MAV 11 Sequences
UMich NCLT dataset (Carlevaris-Bianco et al., 2015) LiDAR Indoor& Outdoor Real Robot 27Sequences
PennCOSYVIO dataset (Pfrommer et al., 2017) stereo Camera, IMU Indoor& Outdoor Real Handheld 27Sequences
TUM VI Dataset (Schubert et al., 2018) stereo Camera, IMU Indoor& Outdoor Real Handheld 28 sequences
RIDI Dataset (Yan et al., 2018) Smartphone with IMU Indoor& Outdoor Real
Human body
worn
60 sequences
ADVIO (Cort
´
es et al., 2018) Smartphone with IMU Indoor& Outdoor Real Handheld 23 sequences
Newer College’s Stereo Vision Lidar IMU Dataset
(Ramezani et al., 2020)
LiDAR,IMU outdoor Real Handheld 9 Sequnces
TartanAir (Wang et al., 2020) - Indoor& Outdoor Synthetic - 1037 Sequnces
Newer College’s Multicam Vision LiDAR IMU
dataset (Zhang et al., 2021)
LiDAR,IMU outdoor Real Handheld 6 Sequences
VOEDHgesture (ours)
Stereo camera with
RGB-D Data Output
Indoor & outdoor Real Head Mounted 264 Sequences
Notes: ”-” means Data not Avilable
2 RELATED WORK
Most of the available public benchmark datasets are
specific to either VO/SLAM or hand gesture recog-
nition tasks. Hence we are analysing both of them
separately in their subsections as below.
2.1 VO/ SLAM Datasets
Based on the sensor carrying platform, VO/ SLAM
datasets can be divided into two categories: 1) a ve-
hicle (e.g. robot, car, MAV) attached and 2) a hu-
man carried. Vehicle-based datasets are often used
to evaluate pose estimate variants in robotics and au-
tonomous driving applications, while human-carrying
datasets are used to evaluate fields where sudden and
quick camera motions are presented, e.g. Augmented
Reality, Mixed Reality, etc. Focusing on the sensors
and environment modules, Table1 provides informa-
tion about the datasets that are useful for the evalua-
tion of VO/ SLAM methods and the same datasets are
summarized below.
2.1.1 Vechicle Based Datasets
RGB-D dataset (Sturm et al., 2012) stands as one of
the initial RGB-D datasets. These dataset sequences
are captured with a Kinect sensor and are collected
in two sensor-carrying platform scenarios: 1) a robot
and 2) a human handheld. All the videos are recorded
in indoor environments along with ground truth tra-
jectory calibrations. The ground truth is calculated
with the integration of a high-precision motion cap-
ture system. Similarly, The ICL-NUIM (Handa et al.,
2014) dataset was gathered with a handheld RGB-D
camera, in which artificial sensor noise is added to get
a realistic feeling in the indoor room sequences visu-
als.
New College Data set (Smith et al., 2009) was
one of the first stereo datasets. Its sequences are cap-
tured in an outdoor environment of the New College
Grounds in Oxford with a robot’s attached Bumble-
Bee stereo camera. Similarly, The KITTI (Geiger
et al., 2012) and KITTI (Geiger et al., 2013) datasets
are the stereo datasets released for research on au-
tonomous vehicle navigation. All the kitti sequences
are captured in the outdoor environment with a stereo
camera attached to the car platform.
EuRoC MAV dataset (Burri et al., 2016) gath-
ers stereo-inertial sequences with an onboard Micro
Aerial Vehicle (MAV) in two environments: 1) Ma-
chine Hall and 2) Vicon Room. This dataset’s ground
truth was captured using a motion capture system and
a laser tracker.
2.1.2 Human Based Datasets
TUM-mono-VO (Engel et al., 2016) dataset was cap-
tured using a hand-held monocular camera in dif-
ferent environment conditions that range from nar-
row indoor corridors to wide outdoor scenes. Pen-
nCOSYVIO (Pfrommer et al., 2017) and TUM VI
(Schubert et al., 2018) datasets are focused on visual-
inertial SLAM evaluation techniques. Both Pen-
nCOSYIO and TUM VI datasets employ stereo cam-
eras to generate indoor and outdoor sequences and
these hold with a human hand. RIDI Dataset (Yan
et al., 2018) and ADVIO (Cort
´
es et al., 2018) are
specifically focused on mobile-based visual-inertial
odometry. ADVIO employs a Google Pixel smart-
phone and an Apple iPhone for their test equipment.
Similarly, the subjects wore four smartphones (e.g.
google Tango phone, LenovoPhad2 Pro. etc.) on
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1338

Table 2: Comparison of different Benchmark Data sets for Hand Gesture Estimation.
Dataset Modality Sensors Resolution
Number
Subjects
Gesture
Classes
EnvironmentsView
Dynamic/
Static
American Sign Language RGB - 320 × 243 1 40 1 Fisr,Second -
Cambridge Gestures RGB - 320 × 240 2 9 5 Second Static
ChAirGesture RGB, Depth,IMU Kinect 640 × 480 10 10 2 second Static, Dynamic
SKIG RGB, Depth Kinect 640 × 480 6 10 3 Second Dynamic
Chalearn Dataset RGB, Depth kinect 640× 480 27 20 1 Second Static
Interactive Museum RGB - 800 × 450 5 7 1 Fisrt Static, Dynamic
nvGesture RGB, Depth, Stereo IR SoftKinect 320 × 240 20 25 1 Second Static, Dynamic
EgocentricGesture RGB, Depth Re 640 × 480 50 83 6 First Static, Dynamic
ArASL RGB - 64 × 40 40 32 - Second Static
IPN Hand RGB - 640 × 480 50 14 28 Second Static,Dynamic
HANDS RGB,Depth Kinect 960 × 540 5 29 5 Second Static
VOEDHgesture (ours) RGB, Depth ZED mini 1920 × 1080 25 40 10 First Static,Dynamic
Notes: ”-” means Data not Avilable
their body during the recording process of the RIDI
Dataset (Yan et al., 2018). Newer College’s Stereo
Vision Lidar IMU Dataset (Ramezani et al., 2020)
and Newer College’s Multicam Vision LiDAR IMU
dataset (Zhang et al., 2021) employ powerful LiDAR
scans for determining the ground truth and the data is
recorded with a hand-held camera.
2.2 Hand Gesture Recognition Dataset
In the field of human hand gesture recognition, most
of the established datasets are captured for the appli-
cation of sign language prediction. So, these datasets
do not include the VO/SLAM’s trajectory ground
truth and were captured in second-person view. In the
second-person view, the subject performs hand ges-
ture activity in front of a camera. The camera faces
the subject at a relatively near distance and acts like a
receiver in the scene. Whereas in the first-person view
(Ego-Centric vision), the camera is mounted on a sub-
ject itself and acts as a performer in the scene. Based
on the view, sensor modalities, Table 2 provides infor-
mation about some of the hand gesture datasets and
the same are briefly discussed below.
For the RGB-related datasets, the American Sign
Language (Starner et al., 1998) dataset (ASL dataset)
collected the data for the sign language purpose with
both first and second-person approaches. The ASL
dataset contains 2,500 images with 40 classes of ges-
tures in a single subject in only one indoor environ-
ment. Similar to ASL dataset, Interactive Museum
(Baraldi et al., 2014) also adopts the egocentric ap-
proach and provides RGB data for gesture recognition
and segmentation tasks. It contains 7 gesture classes
from 5 subjects and also includes a sample of dy-
namic hand gestures. Cambridge hand gesture dataset
(Kim et al., 2007) is also a similar kind of dataset
that provides RGB sequences for action/gesture clas-
sification. However, all the 900 sequences with nine
gesture classes presented in this dataset are collected
in a second-view approach. Although these kinds of
datasets, without any ego-centric vision videos, are
not helpful for the evaluation of wearable computer
interaction techniques, these are useful for the results
comparison of gesture recognition tasks. Recent RGB
datasets ArASL (Latif et al., 2019) and IPN Hand
(Benitez-Garcia et al., 2021) are with a second-person
approach. The AirASL dataset has static 54000 im-
ages, which are useful for Arabic Sign language un-
derstanding. IPN Hand provides more than four thou-
sand images to understand both static and dynamic
hand gestures.
The SKIG (Liu and Shao, 2013) and Chalearn (Es-
calera et al., 2013) datasets provide RGB and depth
sequences, which are collected through the second-
view approach. SKIG dataset’s 1080 sequences are
collected from six subjects with ten hand gesture
classes. Chalearn dataset contains 15,000 images,
which are captured with a Kinect camera for solving
pose estimation problems. In addition to RGB-D in-
formation, the ChAirGesture dataset provides inertial
measurements for their hand gesture sequences. In
the recording setup of ChAirGesture data collection,
an accelerometer is attached to the human hand to
gather the inertial calibrations as per the hand move-
ment. The nvGesture dataset (Molchanov et al., 2016)
includes stereo IR input and RGB-D information in
the dataset. This dataset’s sequences are collected
over 20 subjects with 25 gesture classes in a simu-
lated driving environment. The HANDS (Nuzzi et al.,
2021) dataset also provides RGB and depth frames for
human-robot interaction. It contains 29 unique ges-
ture classes that can be formed using single or both
hands.
In this paper, we are introducing a novel RGB-D
dataset to develop fundamental VO/SLAM and ges-
ture recognition modules of AR/ MR system, which
can be useful for the evaluation of methods that are
useful for projecting the virtual object’s visuals as per
the camera orientation and to manipulate the virtual
content as per the human’s hand gestures.
VOEDHgesture: A Multi-Purpose Visual Odometry/ Simultaneous Localization and Mapping and Egocentric Dynamic Hand Gesture
Data-Set for Virtual Object Manipulations in Wearable Mixed Reality
1339
3 DATA ACQUISITION AND DATA
ANALYSIS
Developing a comprehensive, realistic and large-scale
benchmark for the evaluation of the above-mentioned
tasks presents several challenges, such as capturing a
large amount of data in real time, creating the ground
truth while minimizing the need for extensive supervi-
sion, and selecting appropriate video frames related to
each gesture class and hand region of interest in each
frame. In this section, we discuss our approaches to
addressing these challenges.
3.1 Methodology, Sensors and File
Formats Used
We use a ZED mini visual inertial stereo camera,
one of the few that can accurately measure the 3D
information of the environment with depth accuracy
such that the maximum error is only of < 1.5% when
capturing scene from 3M baseline and error is up to
7% when capture scene distance is above 3m. The
camera captures different images of the scene with
slightly different perspectives from its two lenses and
generates depth information with stereo depth sens-
ing technology. A baseline of 63 mm separates these
lenses to match the average distance between human
pupils. All data was captured at a high resolution of
1920 × 1080 .
ZED Mini Calibration. We followed the (Geiger
et al., 2012) process to calibrate the ZED mini intrin-
sic and extrinsic parameters. We placed a checkboard
pattern in front of the zed camera and detected corners
in our calibration images. The process of matching
corners between the checkboard and the camera and
optimizing them with reprojection errors will give us
the calibration parameters.
Groundtruth. The ground truth for the trajectory of
the VO/ SLAM system is directly obtained from the
RGB-D/ IMU positional tracking module’s output of
the ZED mini camera. Despite using online crowd-
sourcing to annotate tools to generate dynamic hand
gesture ground truth labels, we manually selected the
appropriate video frames related to each gesture and
assigned tracklets to hand regions of interest in each
frame in the form of a bounding box. So that it is
potentially able to create bounding boxes even in mo-
tion blur, truncated, occluded and semi-occluded sit-
uations.
File Formats. Each sequence data is provided in
TGZ file format and contains the following files/ di-
rectories:
• “rgb/”. A directory provides RGB frames of the
sequence in .png format
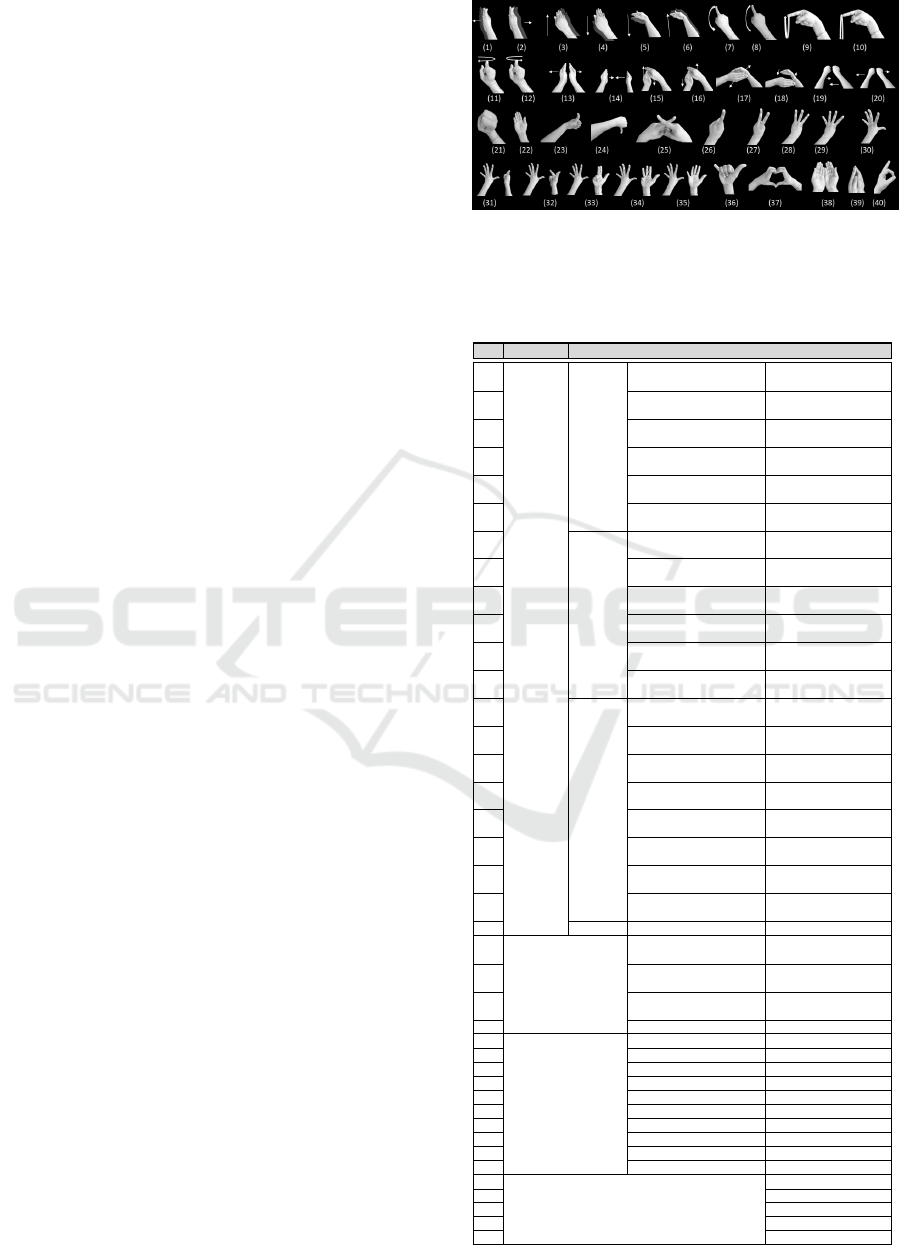
Figure 2: The illustration of 40 gestures classes present in
the proposed VOEDHgesture dataset.
Table 3: Possible Hand Gestures for Virtual Content Ma-
nipulations.
S.N. Category Tasks Manipulation Action
1
Manipulative
Transform
Along X-Axis Towards
Right
Move Towards Right
2
Along X-Axis Towards
Left
Move Towards Left
3
Along Y-Axis Towards
Downwards
Move Towards
Downwards
4
Along Y-Axis Towards
Upwards
Move Towards Up-
wards
5
Along Z-Axis Towards
Right
Move Towards Sub-
ject
6
Along Z-Axis Towards
Left
Moving Away Form
Subject
7
Rotation
Along X-Axis(Roll)
Towards Clockwise
Move Towards Right
8
Along X-Axis(Roll) to-
wards Anti Clockwise
Move Towards Left
9
Along Y-Axis(Pinch)
towards Clockwise
Move Apart From
Subject
10
Along Y-Axis(Pinch)
towards Anti Cockwise
Move Towards Sub-
ject
11
Along Z-Axis(Yaw) to-
wards Clockwise
Move Upwards
12
Along Z-Axis(Yaw)
Towards Anticlockwise
Move Downwards
13
Scale
Along X-Axis Enlarge
Two Hands Move
Apart
14 Along X-Axis Shrink
Two Hands Move To-
gether
15 Along Y-Axis
Two Hands Move
Apart
16 Along Y-Axis
Two Hands Move To-
gether
17 Along Z-Axis
Two Hands Move
Apart
18 Along Z-Axis
Two Hands Move To-
gether
19
Scale Uniform (en-
large)
Two Hands Move
Apart
20 Scale Uniform (shrink)
Two Hands Move To-
gether
21 Bounce Bouncing Constant Position
22
Control
Insert New Virtual Ob-
ject
Constant Position
23
Lock The Virtual Ob-
ject Position
Constant Position
24
Unlock The Virtual Ob-
ject Poistion
Constant Position
25 Erase All AR Visuals Constant Position
26
Speed Control
1× Constant Position
27 2× Constant Position
28 3× Constant Position
29 4× Constant Position
30 5× Constant Position
31 6× Constant Position
32 7× Constant Position
33 8× Constant Position
34 9× Constant Position
35 10× Constant Position
36
Other Gestures
Constant Position
37 Constant Position
38 Constant Position
39 Constant Position
40 Constant Position
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1340

Figure 3: Some hand gesture samples to illustrate the complexity of our dataset (A) Gesture classes with a single hand in
library environment(left) and outdoor environment(right) (B) Gesture classes with both hands in a reading room (left) and on
an outside road (right) (C) Gestures with motion blur in indoor environment (D) Hand gesture in dynamic background in out-
side environment(left) and in inside environment (right) (E) Hand gesture in artificial light(low illumination) in a mechanical
workshop (left) and in outside playground (right) (F) Gestures with hand out of the frame in outside park environment (left)
and in a corridor (right) (G) Gestures collected in mechanical workshop environment (H) Gestures in occluded environment.
• “depth/”. A directory provides grayscale depth
images of the sequence in .png format
• “associations.txt”. A text file contains a matrix of
size N × 4 (One row by frame). Each row repre-
sents a consecutive list of RGB and depth frames
of the sequence (time stamp RGB filename time
stamp Depth filename).
• “gestureinforamtion.txt”. A textfile contains a
matrix of size N × 7 (One row by frame). Each
row represents a consecutive list of hand regions
of interest and gesture class number (Format: se-
quence name, timestamp, x,y, width, height, ges-
ture class)
• “groundtruth.txt”. A text file contains a matrix of
size N × 7. each row represents the positional and
rotation vectors (format: time stamp tx ty tz qx qy
qz qw).
• “calibration.yaml”. A text containing the calibra-
tion parameters of the camera.
In addition to the above files, we provide
train handgesture.txt and test handgesture.txt that
provide the information related to train and test se-
quences respectively.
The subjects wear the ZED mini camera to their
head using a strap-mounted belt, as illustrated in fig-
ure 1 and are directed to perform all the hand ges-
tures classes illustrated in figure 2 in nine differ-
ent environments, these environments include six in-
door scenes (e.g. Hostel room, reading room, library,
lobby, mechanical lab) and three outdoor scenes (Out-
door lobby, road or pathway, park). To simulate all
possible scenarios of wearable counting, we defined
four different scenarios: 1) Both the subject and back-
ground are stationary, 2) The subject is stationary
against a dynamic background, 3) The subject is dy-
namic (Walking) against a static background, and 4)
Both subject and background are dynamic. During
the data collection process, in the beginning, we guide
the subjects in the execution of each gesture along
with brief descriptions and provide them with the cor-
responding gesture names as per the list of gesture
names in the table 3. The subjects are informed of the
gesture name and instructed to execute it accordingly.
Each session involves the continuous performance of
all 40 gestures in any random order. These are then
captured and recorded as a video.
3.2 Characteristics of the Dataset
The sequences in the dataset could have been char-
acterized along gestures classes, subjects, ego-centric
motion, illumination conditions and cluttered back-
ground, as illustrated in figure 3 and the same is ex-
plained below:
Gesture Classes. As we are designing the gesture
classes for wearable-computer interaction, the gesture
classes should be meaningful, and easily memorable
to users. Following these principles, we have catego-
rized the gestures into four main categories: 1) Ma-
nipulative, 2) Control, 3) Speed control, and 4) Other
gestures as in table 3. The manipulative class gestures
are used to instruct the computer for position change,
rotational change and scale change of virtual content.
VOEDHgesture: A Multi-Purpose Visual Odometry/ Simultaneous Localization and Mapping and Egocentric Dynamic Hand Gesture
Data-Set for Virtual Object Manipulations in Wearable Mixed Reality
1341

Except for the bouncing operation, all remaining op-
erations are designed as dynamic gestures and can be
performed with both hands of humans. The speed
gestures are designed as a static operation and are use-
ful to control the speed of the manipulative operation.
The control gestures are also static and are useful for
controlling the AR system. The others are not related
to our virtual object manipulative system but can used
for the learning process.
Subjects. The limited intra-class variation due to a
small number of subjects problem can potentially be
addressed by increasing the number of subjects. So,
we invited 25 subjects to expand our data collection
efforts. Twenty males and five females are within the
group of 25 subjects, and these subjects’ average age
is 25, the range is [20,40].
Egocentric Motion. When individuals utilize wear-
able computers, they are frequently in motion, typi-
cally walking. This can lead to significant egocen-
tric motion, resulting in a change in orientation and
motion blur in sequences. Hence, we provided the
ground truth trajectory for evaluating the pose esti-
mation process and incorporated these motion blur
sequences in our dataset for effective training of the
gesture recognition model.
Illumination Conditions. As baseline models are
vision-based, these are very sensitive to illumination
change. Hence, to evaluate the robustness of the
model, we have collected sequences of three different
illumination settings: 1) In the daylight, 2) at night
time with artificial light, and 3) In little illumination
conditions.
Clutter Background. To capture more realistic
videos, we recorded the scenes with static back-
grounds adorned with everyday items and dynamic
backgrounds with pedestrians walking into the cam-
era.
4 BENCHMARK EVALUATION
AND ANALYSIS
4.1 Visual Odometry/ Simultaneous
Localization and Mapping
We executed three different VO/SLAM approaches 1)
ORB-SLAM2 (Mur-Artal and Tard
´
os, 2017), 2) Elas-
ticFusion (Whelan et al., 2015), and 3) Maskfusion
(Runz et al., 2018) on seven different sequences of
our “VOEDHgesture” dataset 1) en1: indoor library
2) en2: Inside a room while subject is walking 3) en3:
inside a mechanical workshop in low light illumina-
tion 4) en4: inside a mechanical workshop in the day
Table 4: Visual Odometry Evaluation.
Sequence ORB-SLAM2 ElasticFusion MaskFusion
en1sub1 0.010 0.020 0.030
en2sub2 0.009 0.013 0.018
en3sub3 0.0680 0.070 0.072
en4sub2 0.005 0.009 0.018
en5sub1 0.025 0.018 0.019
en1sub2 0.022 0.038 0.041
Comparison of ATE-RMSE(m)
time with normal sunlight 5) en5: On a road while
dynamic objects are moving in background 6) en6: in
a motion blur due to student hand or head movements
and 7) en7: hand captured partially for the perfor-
mance evaluation. From the evaluation of the above
SLAM models on our dataset found that these algo-
rithms couldn’t deliver better results in complex, real-
istic situations like en3.
ORB-SLAM2 (Mur-Artal and Tard
´
os, 2017) is
a real-time feature-based, RGB-D visual odometry
and SLAM library that employs bundle adjustment to
build globally consistent sparse reconstruction. ORB-
SLAM2 utilizes the RGB-D sensors’ depth informa-
tion to generate the current frame’s feature coordi-
nates. ORB SLAM2 prefers sparse construction of
globally consistent trajectories instead of dense scene
reconstruction and trajectories with full details. How-
ever, ORB SLAM2 precise keyframe positions could
efficiently generate accurate reconstruction calibra-
tions by fusing the position values into depth maps.
ElasticFusion (Whelan et al., 2015) is also an
RGB-D SLAM that captures RGB and depth informa-
tion for dense reconstruction of the surrounding en-
vironment. However, instead of pose graph optimisa-
tion, ElasticFusion utilizes a surfel-based map-centric
approach to achieve non-rigid deformation and loop-
closing properties in the map.
Maskfusion (Runz et al., 2018) is one of the RGB-
D SLAMs that can employ semantic information of
objects to efficiently deal the non-rigid and dynamic
scene situations. This method utilizes Mask-RCNN to
detect, recognize, track and reconstruct the multiple
moving objects and also a geometry-based segmenta-
tion method to increase the object boundaries in the
object mask.
We utilized Absolute Trajectory Error (ATE)
(Sturm et al., 2012) for evaluating the VO/SLAM
models. ATE is the Root Mean Square Error (RMSE)
distance between estimated trajectory values and
ground truth trajectory values, and it can defined as
below:
ATE
rmse
(F
1:n
) :=
1
n
n
∑
i=1
trans
Q
−1
i
SP
i
2
!
1/2
(1)
Here, F
1:n
represents the frames presented in the se-
quence from frame numbers 1 to n and P
1:n
and Q
1:n
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1342

represents the calibrated and ground truth trajectory
values. S is the rigid body transformation to properly
align the estimated and ground truth trajectory’s coor-
dinate systems.
As listed in table4. Our evaluation of the dataset
on VO/SLAM algorithms delivers better results in oc-
cluded environments with static background scenes
like a library, room, machine lab, and playground
without human movements. However, it faces chal-
lenges during the evaluation of complex sequences
like outdoor environments with dynamic backgrounds
in low illumination conditions. ElasticFusion (Whe-
lan et al., 2015) delivers a little lower performance
than ORB-SLAM2 in dealing with occluded static en-
vironments; however, it delivers better results in situ-
ations like dynamic background scenes. However, de-
livers low accuracy in low illumination with minimal
texture conditions. Maskfusion (Runz et al., 2018)
also delivers similar results in static, occluded back-
grounds, but in dynamic background scenes, it deliv-
ers better performance than ORBSLAM2 and Elas-
tic fusion. However, it also could not deliver better
results in low illumination conditions.
4.2 Hand Gesture Classification on
Continuous Data
The hand region occupies a partial part of the im-
ages, not a full image. So, training the model with
segmented hand regions of interest will deliver bet-
ter performance. In our dataset files, gestureinforam-
tion.txt contains the hand region of interest bounding
box information and consecutive frame’s time stamp
along with gesture class. These two data columns
enable the spatiotemporal relation of the content of
the gestures. With our dataset, The gesture detec-
tion and classification tasks initially investigated the
effect of the count of input frames. Table 5 shows the
VOEDHgesture accuracy on state-of-the-art classifi-
cation models. Secondly, we investigated the effect of
RGB and RGB+DEPTH features on the performance
of the model. We observed that RGB with depth maps
delivers better performance than a single RGB model.
We set the learning rate and the batch size as per the
specification of Yifan’s (Zhang et al., 2018) and used
Jaccard index (Zhang et al., 2018) for evaluating the
continuous hand gestures, and it is defined as follows.
J
s
=
1
l
s
L
∑
i=1
G
s,i
∩ P
s,i
G
s,i
∪ P
s,i
(2)
Here, G
s,i
and P
s,i
represents the ground and estimated
classes of i
th
gestures label for the sequence s with l
s
classes.
Table 5: Gesture Classification Evaluation on Continuous
Data.
MODEL INPUT JACCARD
RGB RGB+DEPTH
VGG-16+LSTM (Zhang et al., 2018) 1216 0.680 0.73
VGG-16+LSTM (Zhang et al., 2018) 1617 0.60 0.71
C3D+STTM (Zhang et al., 2018) 1216 0.820 0.910
C3D+STTM (Zhang et al., 2018) 1617 0.801 0.89
RESNeXT-101 1216 0.650 0.691
RESNeXT-101 1617 0.67 0.68
C3D+LSTM+RSTTM(Zhang et al., 2018) 1216 0.85 0.91
C3D+LSTM+RSTTM(Zhang et al., 2018) 1617 0.83 0.88
5 CONCLUSIONS
We introduced a novel benchmark dataset for evaluat-
ing both hand gesture recognition and RGB-D VO/
SLAM systems. The benchmark dataset provides
RGB images, depth images, ground truth of the pose
calibrations trajectory and spatiotemporal informa-
tion of the hand region of interest. The novel dataset
provides more diversified background scenes than the
existing datasets, as it is collected in ten environ-
ments in three different illumination conditions. After
evaluating our dataset on different conventions RGB-
D SLAM ORB-SLAM2, ElasticFusion, and Maskfu-
sion, we find that ORB SLAM2 delivers better perfor-
mance for RGB-D SLAM in static occluded results.
ElasticFusion and Maskfusion have delivered better
performance even in dynamic environments. How-
ever, these SLAM methods delivered low accuracy in
low-illumination environments. We also investigated
our dataset on hand gesture classification tasks. We
obsessed that RGB images along with depth images,
delivered better performance than RGB images alone.
our dataset VOEDHgesture can help for further ex-
ploration of research works: 1) Investigation into spa-
tiotemporal modeling is possible 2) hand gesture de-
tection, recognization, and tracking is possible.
REFERENCES
Baraldi, L., Paci, F., Serra, G., Benini, L., and Cucchiara, R.
(2014). Gesture recognition in ego-centric videos us-
ing dense trajectories and hand segmentation. In Pro-
ceedings of the IEEE conference on computer vision
and pattern recognition workshops, pages 688–693.
Benitez-Garcia, G., Olivares-Mercado, J., Sanchez-Perez,
G., and Yanai, K. (2021). Ipn hand: A video dataset
and benchmark for real-time continuous hand gesture
recognition. In 2020 25th international conference on
pattern recognition (ICPR), pages 4340–4347. IEEE.
Burri, M., Nikolic, J., Gohl, P., Schneider, T., Rehder, J.,
Omari, S., Achtelik, M. W., and Siegwart, R. (2016).
The euroc micro aerial vehicle datasets. The Inter-
national Journal of Robotics Research, 35(10):1157–
1163.
VOEDHgesture: A Multi-Purpose Visual Odometry/ Simultaneous Localization and Mapping and Egocentric Dynamic Hand Gesture
Data-Set for Virtual Object Manipulations in Wearable Mixed Reality
1343

Carlevaris-Bianco, N., Ushani, A. K., and Eustice, R. M.
(2015). University of Michigan North Campus long-
term vision and lidar dataset. International Journal of
Robotics Research, 35(9):1023–1035.
Cort
´
es, S., Solin, A., Rahtu, E., and Kannala, J. (2018). Ad-
vio: An authentic dataset for visual-inertial odometry.
In Proceedings of the European Conference on Com-
puter Vision (ECCV), pages 419–434.
Engel, J., Usenko, V., and Cremers, D. (2016). A photo-
metrically calibrated benchmark for monocular visual
odometry. arXiv preprint arXiv:1607.02555.
Escalera, S., Gonz
`
alez, J., Bar
´
o, X., Reyes, M., Guyon,
I., Athitsos, V., Escalante, H., Sigal, L., Argyros, A.,
Sminchisescu, C., et al. (2013). Chalearn multi-modal
gesture recognition 2013: grand challenge and work-
shop summary. In Proceedings of the 15th ACM on
International conference on multimodal interaction,
pages 365–368.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. The Inter-
national Journal of Robotics Research, 32(11):1231–
1237.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In 2012 IEEE conference on computer vision
and pattern recognition, pages 3354–3361. IEEE.
Handa, A., Whelan, T., McDonald, J., and Davison, A. J.
(2014). A benchmark for rgb-d visual odometry, 3d
reconstruction and slam. In 2014 IEEE international
conference on Robotics and automation (ICRA), pages
1524–1531. IEEE.
Kim, T.-K., Wong, S.-F., and Cipolla, R. (2007). Tensor
canonical correlation analysis for action classification.
In 2007 IEEE Conference on Computer Vision and
Pattern Recognition, pages 1–8. IEEE.
Latif, G., Mohammad, N., Alghazo, J., AlKhalaf, R., and
AlKhalaf, R. (2019). Arasl: Arabic alphabets sign
language dataset. Data in brief, 23:103777.
Liu, L. and Shao, L. (2013). Learning discriminative repre-
sentations from rgb-d video data. In Twenty-third in-
ternational joint conference on artificial intelligence.
Molchanov, P., Yang, X., Gupta, S., Kim, K., Tyree, S., and
Kautz, J. (2016). Online detection and classification
of dynamic hand gestures with recurrent 3d convolu-
tional neural network. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 4207–4215.
Mur-Artal, R. and Tard
´
os, J. D. (2017). Orb-slam2:
An open-source slam system for monocular, stereo,
and rgb-d cameras. IEEE transactions on robotics,
33(5):1255–1262.
Nuzzi, C., Pasinetti, S., Pagani, R., Coffetti, G., and San-
soni, G. (2021). Hands: an rgb-d dataset of static
hand-gestures for human-robot interaction. Data in
Brief, 35:106791.
Pfrommer, B., Sanket, N., Daniilidis, K., and Cleve-
land, J. (2017). Penncosyvio: A challenging vi-
sual inertial odometry benchmark. In 2017 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 3847–3854.
Ramezani, M., Wang, Y., Camurri, M., Wisth, D., Mat-
tamala, M., and Fallon, M. (2020). The newer col-
lege dataset: Handheld lidar, inertial and vision with
ground truth. In 2020 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS), pages
4353–4360. IEEE.
Runz, M., Buffier, M., and Agapito, L. (2018). Maskfu-
sion: Real-time recognition, tracking and reconstruc-
tion of multiple moving objects. In 2018 IEEE Inter-
national Symposium on Mixed and Augmented Reality
(ISMAR), pages 10–20. IEEE.
Schubert, D., Goll, T., Demmel, N., Usenko, V., St
¨
uckler,
J., and Cremers, D. (2018). The tum vi bench-
mark for evaluating visual-inertial odometry. In
2018 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 1680–1687.
Smith, M., Baldwin, I., Churchill, W., Paul, R., and New-
man, P. (2009). The new college vision and laser data
set. The International Journal of Robotics Research,
28(5):595–599.
Starner, T., Weaver, J., and Pentland, A. (1998). Real-
time american sign language recognition using desk
and wearable computer based video. IEEE Trans-
actions on pattern analysis and machine intelligence,
20(12):1371–1375.
Sturm, J., Engelhard, N., Endres, F., Burgard, W., and Cre-
mers, D. (2012). A benchmark for the evaluation of
rgb-d slam systems. In 2012 IEEE/RSJ international
conference on intelligent robots and systems, pages
573–580. IEEE.
Wang, W., Zhu, D., Wang, X., Hu, Y., Qiu, Y., Wang,
C., Hu, Y., Kapoor, A., and Scherer, S. (2020). Tar-
tanair: A dataset to push the limits of visual slam. In
2020 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 4909–4916.
IEEE.
Whelan, T., Leutenegger, S., Salas-Moreno, R., Glocker,
B., and Davison, A. (2015). Elasticfusion: Dense slam
without a pose graph. Robotics: Science and Systems.
Yan, H., Shan, Q., and Furukawa, Y. (2018). Ridi: Robust
imu double integration. In Proceedings of the Euro-
pean Conference on Computer Vision (ECCV), pages
621–636.
Zhang, L., Camurri, M., and Fallon, M. (2021). Multi-
camera lidar inertial extension to the newer college
dataset. arXiv preprint arXiv:2112.08854.
Zhang, Y., Cao, C., Cheng, J., and Lu, H. (2018). Egoges-
ture: A new dataset and benchmark for egocentric
hand gesture recognition. IEEE Transactions on Mul-
timedia, 20(5):1038–1050.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1344
