
Using the Robot-Assisted Attention-Engagement-Error-Feedback-
Reflection (AEER) Pedagogical Design to Develop Machine Learning
Concepts and Facilitate Reflection on Learning-to-Learn Skills:
Evaluation of an Empirical Study in Hong Kong Primary Schools
Siu-Cheung Kong
1,2 a
and Yin Yang
2b
1
Artificial Intelligence and Digital Competency Education Centre, The Education University of Hong Kong, HKSAR, China
2
Department of Mathematics and Information Technology, The Education University of Hong Kong, HKSAR, China
Keywords: Learning-to-Learn, Machine Learning, Neuroscience-Informed Pedagogical Framework, Primary Schools,
Robots.
Abstract: This paper presents the results of an empirical study that aimed to evaluate the effectiveness of using robots
to teach machine learning concepts to primary school students and consolidate their reflection on learning-to-
learn skills. The pedagogical design of this study was based on the neuroscience-informed Attention-
Engagement-Error-feedback-Reflection (AEER) framework. The study involved 87 Grade 5 students from
Hong Kong. Data collection included pre- and post-tests on machine learning concepts, as well as pre- and
post-questionnaires on learning-to-learn skills based on the AEER framework. The findings suggest that the
use of purposely designed robots for understanding machine learning significantly enhanced primary school
students’ understanding of machine learning concepts. Further, it can facilitate students’ reflection on their
learning-to-learn skills, which have been nurtured over their years of study period, thereby effectively
preparing them for the transition to secondary school education. The paper concludes with a discussion of the
findings and provides potential directions for future research.
1 INTRODUCTION
Artificial intelligence (AI), and in particular machine
learning, is transforming the global world. The
promotion of AI literacy to all young learners in their
schooling can empower them to have an identification
as part of the future AI society. In this context, the
experiences from teaching machines to learn using
supervised learning and/or reinforcement learning
offer young learners’ unique opportunities to reflect
on their own learning skills.
AI education is pivotal in nurturing students into
educated citizens equipped to thrive in an AI-
prevalent future (Kong et al., 2022; Kong et al.,
2023). Learning-to-learn skills, regarded as the
capacity of individuals to self-regulate, monitor, and
control their learning activities (Cornford, 2002), are
of crucial importance in the contemporary AI-driven
society.
a
https://orcid.org/0000-0002-8691-3016
b
https://orcid.org/0000-0002-9966-248X
Despite the need for consolidating learning-to-
learn skills in education (e.g. Vainikainen et al.,
2015), very few studies have explored using robots in
machine learning to engage young students and
connecting machine learning to facilitate reflection
on learning-to-learn (Martin et al., 2023; Kong &
Yang, 2023). This study aimed to conduct an
empirical study on the application of robots, which
are purposely designed for uncovering the black box
of machine learning, to develop Hong Kong senior
primary students’ machine learning concepts and to
facilitate the consolidation of learning-to-learn skills,
based on their past years of study period in schools.
The following research questions were addressed in
this study: Research question 1: To what extent do
primary students enhance their understanding of
machine learning concepts through the pedagogical
activities? Research question 2: To what extent do
primary students enhance the consolidation of
learning-to-learn skills?
Kong, S. and Yang, Y.
Using the Robot-Assisted Attention-Engagement-Error-Feedback- Reflection (AEER) Pedagogical Design to Develop Machine Learning Concepts and Facilitate Reflection on
Learning-to-Learn Skills: Evaluation of an Empirical Study in Hong Kong Primary Schools.
DOI: 10.5220/0012505700003693
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Computer Supported Education (CSEDU 2024) - Volume 2, pages 155-162
ISBN: 978-989-758-697-2; ISSN: 2184-5026
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
155

2 LITERATURE REVIEW
2.1 Using Robots to Support Primary
Students’ Machine Learning
Machine learning is a subfield of AI, which has
complex and abstract concepts that can be hard for
young students like primary school students to
understand (Zimmerman, 2018). Despite the inherent
difficulty of teaching these concepts to young learners
like primary school students, there is a growing interest
in integrating machine learning education into K-12
educational settings, aiming to prepare young learners
for an AI-infused future (Lin et al., 2020).
One of the frequent challenges for educators
introducing machine learning-related content is the
complexity of technical terms and the need to present
these terms in a manner that engages students and
sustains their interest (Kong & Yang, 2023). In
response, several user-friendly platforms such as
Teachable Machine and Dancing with AI have been
adopted to engage beginners who are interested in
machine learning. However, these platforms often fall
short of explaining the algorithms that drive the
machines (Voulgari et al., 2021).
Given that the integration of machine learning in
K-12 education is a relatively new area of research
focus, there is a need for empirical studies that
employ innovative approaches to enrich this
developing domain (Sanusi et al., 2023). One
promising approach is to help students understand
machine learning concepts using robots. Various
studies have used robots to elucidate AI and machine
learning concepts to students (Al Hakim et al; 2022;
Olari et al., 2021; Williams et al., 2019). For instance,
the Preschool-Oriented Programming (PopBots)
Platform, which includes a social robot toolkit
comprising a smartphone, LEGO blocks, motors, and
sensors, was used to help preschool students know
machine learning (Williams et al., 2019). This
platform allowed the kindergarten students to talk to
the robots and use a block-based interface to code.
Similar studies have also been explored the use of
coding to create applications with simulated robots
(e.g. Olari et al., 2021). Although the block-based
approach is child-friendly, it does not necessarily
facilitate children’s understanding of the underlying
algorithms of machine learning (Jatzlau et al., 2019).
In our present study, we utilised AlphAI robots
(https://learningrobots.ai/?lang=en) to help non-
programming senior primary school students in Hong
Kong to understand machine learning concepts. This
platform is designed purposely to uncover the black
box of machine learning. The system presents
graphical visualisations to assist students in
understanding the underlying algorithms, such as K-
nearest neighbours, supervised learning using deep
learning approach, and reinforcement learning.
2.2 Facilitating Learning-to-Learn
Skills in Machine Learning
Learning-to-learn skills, also known as metacognitive
skills, are crucial for fostering students’ independence
and enhancing problem-solving and critical thinking
abilities (Cornford, 2002). When students are in their
early stages of education, they already possess these
fundamental learning-to-learn abilities (McCombs,
1991). Students are encouraged to maintain
concentration on learning, engage in practical
activities, actively conduct hands-on activities,
engage in peer discussions, correct errors, and reflect
on their learning experiences through K-12 education
settings (Jocz et al., 2014).
Although it is common for primary school
students to participate in activities that promote the
development of these skills, there is a lack of
instructional methods that specifically target active
reflection on the significance of learning-to-learn
skills (Ashford & DeRue, 2012).
Existing research on the use of robots in machine
learning education primarily focused on students’
perception of machine learning, their motivation, and
engagement (Burgsteiner et al., 2016; Kammer et al.,
2011; Olari et al., 2021; Williams et al., 2019).
However, the extent to which the teaching of machine
learning concepts using purposely designed robots can
facilitate the reflection and consolidation on learning-
to-learn skills of young students is still unknown.
Using robots in machine learning education offers
a unique opportunity to senior primary school
students to reflect on learning-to-learn skills.
Moreover, learning machine learning with robots also
involves iterative learning, where students can
progressively improve the robot’s performance, learn
from their mistakes, evaluate their strategies after
receiving or observing feedback, and apply different
approaches (Voulgari et al., 2021). This process can
assist students in understanding the importance of
persistence, repetitive/deliberate practice, and
reflection in learning.
2.3 Neuroscience-Informed
Pedagogical Framework in
Primary AI Education
In the existing literature, most pedagogical
frameworks for AI education in primary schools tend
CSEDU 2024 - 16th International Conference on Computer Supported Education
156

to employ game-based or project-based learning
approaches (Voulgari et al., 2021; Lee et al., 2021).
However, cognitive scientists argue for the creation
of a novel pedagogical framework that fosters deep,
authentic, and collaborative learning, drawing upon
insights from neuroscience (Hardiman, 2012). The
field of neuroscience has provided significant
contributions in understanding the process of human
learning (Immordino ‐ Yang et al., 2007). These
contributions can be effectively utilised to enhance
the educational practises of AI. According to
Jamaludin et al. (2019), neuroscience-informed
pedagogical framework can facilitate the alignment
of teaching tactics and approaches with the inherent
learning processes of the brain. By employing such an
approach, educators can effectively enhance students’
comprehension of AI and machine learning, sustain
their engagement in the learning process, and foster
the acquisition of crucial skills that are essential for
future endeavours. However, neuroscience-informed
pedagogical frameworks can rarely be found in
primary AI education.
Against this backdrop, Kong and Yang (2023)
proposed the Attention-Engagement-Error-
Feedback-Reflection (AEER) pedagogical design,
which is informed by the four fundamental principles
of learning delineated by Dehaene (2020), a
prominent cognitive neuroscientist from France. The
robot-assisted AEER pedagogical design aligns with
findings from the learning sciences and emphasises
the importance of fostering a deeper understanding of
machine learning concepts and seeks to emphasise
and reinforce learning-to-learn skills. While game
and project-based learning can be effective for initial
engagement and exposure to AI concepts, they may
fall short in facilitating the deeper cognitive processes
that AEER targets. For instance, games may capture
attention and engagement, they may not always
provide the specific, targeted feedback necessary for
students to recognize and understand their errors, nor
the scaffolding to guide reflection on why an error
occurred.
3 THE ROBOTS USED IN THIS
STUDY
In this study, the AlphAI robots were used to teach
primary students’ machine learning in a concrete and
precise manner, effectively “opening the black box of
AI” (Learning Robots, n.d.). Each robot is connected
to the AlphAI software (refer to Figure 1). The robot
is packed with sensors (e.g. wide-angle camera,
ultrasound, infrared line tracking sensors), so it can
recognise via an inbuilt camera. The AlphAI software
provides a graphical representation of AI algorithms,
such as K-nearest neighbours (KNN), artificial neural
network (ANN), and reinforcement learning.
Moreover, it allows students to directly control the
robot using arrows on the keyboard or clicking the
arrows on the screen. As the quality of robot training
is also influenced by the robot’s environment, the
playing arena was set to facilitate robot movement.
Figure 2 depicts the specific arena of training robots.
Figure 1: The AlphAI robot and software.
Figure 2: The arena for training AlphAI robots.
4 CURRICULUM DESIGN
4.1 The Attention-Engagement-Error-
Feedback-Reflection (AEER)
Pedagogical Framework
The AEER pedagogical framework (Kong & Yang,
2023) was implemented in this study. To be specific,
in “Attention”, students were directed to identify
important and relevant information, highlight
important and relevant concepts in the worksheets,
and understand the importance of maintaining and
refocusing attention after taking a short break
throughout the learning process.
In “Engagement”, the course stimulated active
engagement by kindling students’ curiosity in
training robots to learn machine learning. The course
promoted peer discussions, provided hands-on
activities, and offered real-time feedback. Students
were invited to observe the robots’ performance and
recorded their observations in the worksheets.
Using the Robot-Assisted Attention-Engagement-Error-Feedback- Reflection (AEER) Pedagogical Design to Develop Machine Learning
Concepts and Facilitate Reflection on Learning-to-Learn Skills: Evaluation of an Empirical Study in Hong Kong Primary Schools
157

In “Error-feedback”, students were taught to
formulate hypotheses, test them, and make
corrections based on the feedback received. For
instance, they are encouraged to hypothesise whether
larger K values (K can set from 1 to 100) would yield
improved results when using KNN algorithm and test
their hypotheses in training sessions.
In “Reflection”, students were invited to review
their goals or sub-goals, share their reflections with
others, revise plans to improve their training, and
compare machine learning with human learning.
4.2 Machine Learning and
Learning-to- Learn Course Design
The course design covered (1) introduction to AI, (2)
exploration of three concepts of machine learning: K-
nearest neighbours (KNN), artificial neural network
(ANN), and reinforcement learning, and (3)
integration learning-to-learn skills into learning
activities based on the robot-assisted AEER
pedagogical framework.
4.2.1 Introduction to AI
The course provided a foundational understanding of
AI, discussing its definition and exploring different
types of machine learning such as unsupervised
learning, supervised learning, and reinforcement
learning. It also introduced the four main steps
involved in machine learning: defining the problem,
collecting and cleaning data, training the model,
evaluating the model, and making inferential
conclusions.
4.2.2 Exploration of Three Concepts of
Machine Learning
Students learnt three concepts via training AlphAI
robots. (1) K-nearest neighbours (KNN). The AlphAI
software provides an interactive interface that allows
students to delve into the workings of the K-Nearest
Neighbours (KNN) algorithm. As part of the learning
experience, students can observe how robots make
decisions by considering the proximity of their
nearest neighbours. (2) Artificial neural network
(ANN). The structure of an ANN (e.g., input, hidden,
output layers) is visualised in the AlphAI software. In
ANN, nodes are called neurons. The strength of
connections between neurons is represented by lines
in the AlphAI software. (3) Reinforcement learning.
It is a type of machine learning where an agent (in this
case, AlphAI learning robots) learns to make
decisions by performing actions and receiving
feedback from its environment. Every time the robot
moves, it can receive rewards, the value of Level is
determined by the average rewards obtained per
minute. The robot starts with no knowledge of its
environment and begins to take random actions,
learning from the consequences of these actions. The
robot receives a reward when it successfully moves;
whereas it receives a penalty when it gets stuck. The
robot improves its performances via utilising these
rewards and penalties.
4.2.3 Integration Learning-to-Learn Skills
into Learning Activities Based on the
AEER Pedagogical Framework
The following section explains how the AlphAI
robots were incorporated into the learning activities,
with specific focus to each area of the AEER
framework. Regarding “Attention”, the AlphAI
robots are utilized to introduce students to core
principles of supervised learning (KNN, ANN) and
reinforcement learning. These robots use attention
mechanisms, such as image capturing and recognition
to “learn” how to move. To parallel this, learning
activities are crafted to enhance students’ attention.
Worksheets with text hints, images, and illustrations
are utilized to guide students in concentrating on the
task at hand, such as through exercises like naming
the robot or using thought bubbles. In developing
learning-to-learn skills, students are instructed on
setting clear goals and subgoals for their robot
training sessions. They learn to identify vital
information and underscore key machine learning
concepts. In addition, an emphasis is also placed on
the need for relaxation and refocusing.
Regarding “Engagement”, in the concept of
supervised learning, students directly interact with the
learning process through hands-on activities. When
the robots encounter obstacles on the track in KNN
and ANN activities, students are encouraged to
supervise the robots to observe and then moves again.
Students need to explore the effect of adjusting the
value of K in KNN activities. In reinforcement
learning, the robots adapt their actions based on
rewards and penalties. Students need to observe how
the robots learn. In developing learning-to-learn skills,
The teacher(s) enhance students’ engagement by
sparking students’ curiosity to explore new
knowledge, facilitating peer discussions, guiding
hands-on activities, observing, and recording.
Students are encouraged to engage in deliberation
until they understand the reasons of success and
sources of obstacles when they supervise the robots
to learn, and these activities serve as foods for
CSEDU 2024 - 16th International Conference on Computer Supported Education
158

thoughts in reflecting how students learn with open-
minded observation and engagement in their daily
learning.
Regarding “Error-feedback”, robots encounter
obstacles in moving forward such as hitting a wall and
getting stuck in a corner. Students need to supervise
the robots to act appropriately by providing
opportunities to encounter obstacles and find ways to
overcome. Students need to spend quite a substantial
period in supervising the robots to overcome the
obstacles and these provide opportunities for students
to reflect. In parallel, these activities are designed to
help students reflect on their own learning. Students
observe errors made by robots during training, such
as hitting walls and getting stuck, and adjust their
strategies accordingly. Rather than viewing errors as
failures, they are guided to consider these as learning
opportunities. The teacher guides students in
understanding and rectifying errors made by the
robots and helping them understand the importance of
seeking for feedback. Students are encouraged to
engage in repetitive practices until the obstacles are
resolved in supervising the robots to learn and these
activities serve as foods for thoughts in reflecting how
students learn with perseverance to overcome
learning barriers in daily learning.
The “Reflection” stage is where students
synthesize learning activities and evaluate their
cumulative learning experiences. In the case of robot
training, students can apply different algorithms such
as KNN, ANN, and reinforcement learning, each with
its unique advantages and limitations, to train their
robots for a racing challenge. Through this process,
students came to understand that qualitative data
plays a pivotal role in the robot’s performance. When
faced with obstacles, such data can assist the robot in
performing well in “self-driving”. In developing
learning-to-learn skills, students are guided to
consider various strategies to enhance their
understanding and to seek out new methods for
overcoming conceptual challenges. This reflective
practice is vital for developing a growth mindset.
Students are not merely passive recipients of
knowledge but are actively engaged in figuring out
how to learn and apply new concepts.
5 METHODOLOGY
5.1 Participants
The convenience sampling approach was adopted
(Etikan et al., 2016). The teacher from the selected
school had previously worked closely with the
researchers on other research projects.
A number of 87 Grade 5 students (girls = 43.7%,
boys = 56.3%) from five classes aged between 9 and
10 participated in a two-day workshop. In compliance
with ethical considerations involving participant data,
signed consent forms were obtained from the students
and their parents before initiating the study.
During the workshop, the students were divided
into twelve groups. The grouping was based on
voluntary principles, allowing students to select their
own group members (Rienties et al., 2014). Each
group was provided with an AlphAI robot and a
computer. A teaching tutor from the research team
was assigned to assist two groups.
5.2 Research Procedure
The study included two 2-hour workshops. In the first
workshop, students were introduced to basic concepts
of AI and machine learning (e.g. unsupervised
learning, supervised learning, and reinforcement
learning) through hands-on robot training. The
second workshop let students apply and reflect on the
knowledge gained in the first, training robots to
navigate a new environment while avoiding
obstacles.
Before the first workshop, the students completed
a pre-test of machine learning concepts and a pre-
survey on learning-to-learn skills. The AEER
pedagogical design was employed to deepen the
students’ understanding of supervised learning
(KNN, ANN) and reinforcement learning. The task
involved guiding a robot to move in a clockwise
direction along the track after training (refer to Figure
2). After the second workshop, students completed a
post-test on machine learning concepts, along with a
post-survey.
5.3 Data Collection and Analysis
In this study, the data sources included (1) pre- and
post-tests on machine learning concepts, and (2) pre-
and post-surveys on learning-to-learn using a five-
Likert scale (ranging from strongly disagree 1 to
strongly agree 5).
The instruments used in this study were developed
and validated through the collaborative efforts of
three experts in AI education and two researchers
specialising in metacognition.
The machine learning concept test was designed
to assess students’ conceptual understanding in
machine learning and deep learning (refer to
Appendix I). The test was designed based on Bloom’s
Using the Robot-Assisted Attention-Engagement-Error-Feedback- Reflection (AEER) Pedagogical Design to Develop Machine Learning
Concepts and Facilitate Reflection on Learning-to-Learn Skills: Evaluation of an Empirical Study in Hong Kong Primary Schools
159
taxonomy and comprised eight items, with a
Cronbach’s alpha of 0.60. To be specific, two items
assessed students’ ability to recognise and recall the
facts related to machine learning procedures. One item
tested students’ comprehension of the machine
learning process. One item evaluated the students’
problem-solving abilities using their understanding of
KNN. Two items accessed students’ evaluative skills
by choosing the right statements about AI and
reinforcement learning. One item focused on analysis,
where students were asked to compare the differences
between supervised and unsupervised learning. The
final item required students to design a plan using the
knowledge they acquired during the workshops.
The questionnaire on learning-to-learn skills
included four dimensions of attention, engagement,
error-feedback, and reflections with 15 items (refer to
Appendix II). The Cronbach’ alpha was above 0.80.
For the data analysis, to address RQ1, paired
samples t-tests were used to compare the pre-and
post-tests. To address RQ2, regarding the students’
learning-to-learn skills in the context of AI education,
the paired samples t-test was used.
6 RESULTS
6.1 Understanding Machine Learning
Concepts
A paired samples t-test was conducted to determine
whether there were statistically significant
differences in the scores of conceptual understating of
machine learning in pre- and post-tests. Table 1
shows the descriptive data of eight items of the test.
A significant difference was observed between pre-,
and post-test, M
diff
= 0.98, 95% CI [0.52, 1.44], p <
0.001).
Table 1: Descriptive data and paired samples t-test of
machine learning concepts.
Dimensions Pre Post Paired samples t-test
M SD M SD t
Item1 0.33 0.47 0.60 0.49 4.01***
Item2 0.17 0.38 0.45 0.50 4.40***
Item3 0.67 0.47 0.70 0.46 0.75
Item4 0.51 0.50 0.64 0.48 1.98*
Item5 0.25 0.44 0.39 0.49 2.25*
Item6 0.34 0.48 0.54 0.50 2.56**
Item7 0.31 0.47 0.63 0.49 5.32***
Item8 0.16 0.37 0.44 0.50 4.26***
Total Grade 2.75 1.51 3.72 1.81 4.22***
Note: M = mean, SD = standardised deviation
* p < 0.05, ** p < 0.01, *** p < 0.001
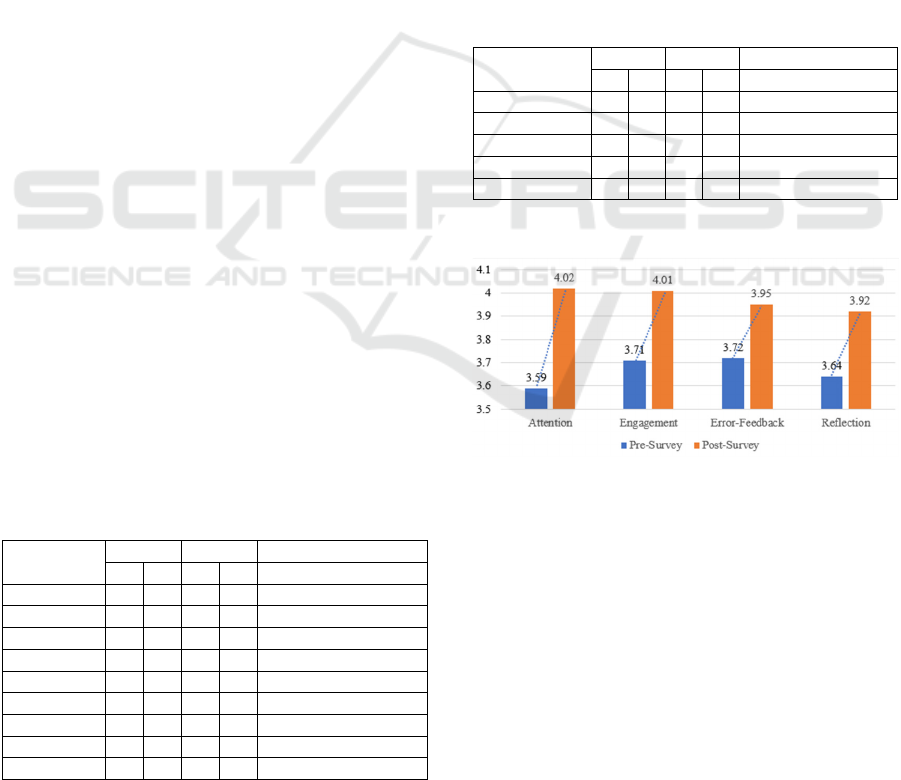
6.2 Facilitating Reflection on
Leaning-to-Learn Skills
Paired samples t-tests were conducted to determine
whether there were statistically significant
differences in the pre-and post-surveys. Table 2
shows the descriptive data that students learning-to-
learn skills improved in terms of four dimensions:
attention (M
diff
= 0.43, 95% CI [0.25, 0.60], p < .001),
engagement (M
diff
= 0.31, 95% CI [0.14, 0.47], p <
.001), error-feedback (M
diff
= 0.23, 95% CI [0.04,
0.42], p < 0.05), and reflection (M
diff
= 0.28, 95% CI
[0.11, 0.44], p < 0.001) (refer to Figure 3). Overall,
there was a statistically significant increase in
students’ learning-to-learn skills from the pre-survey
to the post-survey (M
diff
= 0.11, 95% CI [0.03,0.04],
p < 0.05).
Table 2: Descriptive data and paired samples t-test of
Leaning-to-learn survey.
Dimensions Pre Post Paired samples t-test
M SD M SD t
Attention 3.59 0.78 4.02 0.68 4.86***
Engagement 3.71 0.69 4.01 0.73 3.74***
Error-feedback 3.72 0.74 3.95 0.73 2.45*
Reflection 3.64 0.74 3.92 0.66 3.38***
Average 3.67 0.60 3.97 0.62 4.56***
Note: M = mean, SD = standardised deviation
* p < 0.05, ** p < 0.01, *** p < 0.001
Figure 3: Students’ perceptions of attention, engagement,
error-feedback and reflection between pre- and post-survey.
7 DISCUSSION AND FUTURE
WORK
This study aimed to address the current research gaps
by focusing on adopting the neuroscience-informed
AEER pedagogical design to enhance primary
students’ machine learning and facilitate students to
actively reflect on their learning-to-learn skills. The
results of this study showed the positive effectiveness
of using robots underpinned by the AEER
pedagogical design in enhancing primary students
CSEDU 2024 - 16th International Conference on Computer Supported Education
160

understanding of machine learning concepts and
facilitating learning-to-learn skills gained from
pervious studying periods. The findings are in line
with prior research, where children showed interest in
investigating why the robot failed to learn efficiently
(Lin et al., 2020; Olari et al., 2021). Through
observing and reflecting on the performance of
robots, students can learn machine learning in a fun
way. In addition, training robots to reflect on
learning-to-learn deepen senior primary students’
metacognitive skills. Thereby there is a potential to
effectively preparing primary students for the
transition to secondary school education, which needs
more metacognitive skills. Although this empirical
study is promising in integrating machine learning
and learning-to-learn skills into primary education,
further exploration is needed.
The study has contributed to both teaching and
research. First, this study provides a novel
pedagogical design that can help teachers make their
instruction more effective and engaging in machine
learning using robots. Furthermore, the study
highlights the potential of the AEER as a guide for
teaching strategies, especially in promoting learning-
to-learn skills in machine learning. By integrating this
model into teaching, educators may be able to foster
a deeper understanding of the subject matter and
enhance students’ metacognitive skills. Second, this
study provides a foundation for further research in
developing primary students’ machine learning
concepts and facilitating learning-to-learn skills
through the robot-assisted AEER. This research fills
an existing gap in the literature and enriches the
practices of using robots to teach machine learning at
the primary school level. Furthermore, the positive
results from the AEER model implementation
indicate its potential for refinement across other
subjects.
The study acknowledges three primary
limitations. First, the curriculum design has
incorporated machine learning with learning-to-learn
into primary education via two 2-hour workshops.
While this approach was novel, it may pose
challenges for primary-aged children due to the
length and difficulty. Even though we used comics
and other visual aids to engage students in our
worksheet designs, which were based on the
characteristics of young learners, future curriculum
designers should consider a variety of tactics to
maintain students’ attention and involvement during
each two-hour workshop.
Second, the relatively low Cronbach’s alpha of
0.60 in machine learning concept tests suggests the
need for improving its reliability. Future studies will
consider refining the test items or increase the number
of items to improve its internal consistency.
Third, the AEER pedagogical design still needs
further iterative refinement. By analysing the robots’
performance and training robots, students were able
to identify the differences and similarities between
machine learning and human learning, while how to
further help senior primary students reflect on
learning-to-learn, especially for receiving feedback to
overcome the obstacles in their learning need to be
further discussed. Future research could include
longitudinal research to investigate the long-term
impacts of the pedagogical design on students’
understanding of machine learning concepts and
development of learning-to-learn skills.
ACKNOWLEDGEMENTS
The authors would like to acknowledge this artificial
intelligence literacy project with the funding support
from the Li Ka Shing Foundation and the Research
Grants Council, University Grants Committee of the
Hong Kong Special Administrative Region, China
(Project No. EdUHK CB357).
REFERENCES
Al Hakim, V. G., Yang, S.-H., Liyanawatta, M., Wang, J.-
H., & Chen, G.-D. (2022). Robots in situated learning
classrooms with immediate feedback mechanisms to
improve students’ learning performance. Computers
and Education, 182, 104483–. https://doi.org/10.1016/
j.compedu.2022.104483
Ashford, S. J., & DeRue, D. S. (2012). Developing as a
leader: The power of mindful engagement.
Organizational Dynamics, 41(2), 146–154.
Burgsteiner, H., Kandlhofer, M., & Steinbauer, G. (2016).
IRobot: teaching the basics of Artificial Intelligence in
high schools. In Proceedings of the Thirtieth AAAI
Conference on Artificial Intelligence (pp. 4126–4127).
AAAI Press. USA.
Cornford, I. R. (2002). Learning-to-learn strategies as a
basis for effective lifelong learning. International
Journal of Lifelong Education, 21(4), 357-368.
International Publishing. https://doi.org/10.1007/978-
3-31994640-5_13.
Dehaene, S. (2020). How we learn: The new science of
education and the brain. Penguin UK.
Etikan, I., Musa, S. A., & Alkassim, R. S. (2016).
Comparison of convenience sampling and purposive
sampling. American Journal of Theoretical and Applied
Statistics, 5(1), 1–4.
Hardiman, M. M. (2012). The brain-targeted teaching
model for 21st-century schools. Corwin Press.
Using the Robot-Assisted Attention-Engagement-Error-Feedback- Reflection (AEER) Pedagogical Design to Develop Machine Learning
Concepts and Facilitate Reflection on Learning-to-Learn Skills: Evaluation of an Empirical Study in Hong Kong Primary Schools
161

Immordino‐Yang, M. H., & Damasio, A. (2007). We feel,
therefore we learn: The relevance of affective and social
neuroscience to education. Mind, Brain, and Education,
1(1), 3–10.
Jamaludin, A., Henik, A., & Hale, J. B. (2019). Educational
neuroscience: Bridging theory and practice. Learning:
Research and Practice, 5(2), 93–98.
Jatzlau, S., Michaeli, T., Seegerer, S., & Romeike, R.
(2019). It’s not magic after all–machine learning in
snap! using reinforcement learning. In 2019 IEEE
Blocks and Beyond Workshop (B&B) (pp. 37–41).
IEEE. https://doi.org/10.1109/BB48857.2019.8941208
Jocz, J. A., Zhai, J., & Tan, A. L. (2014). Inquiry learning
in the Singaporean context: Factors affecting student
interest in school science. International Journal of
Science Education, 36(15), 2596–2618.
Lee, S., Mott, B., Ottenbreit-Leftwich, A., Scribner, A.,
Taylor, S., Park, K., ... & Lester, J. (2021, May). AI-
infused collaborative inquiry in upper elementary
school: A game-based learning approach. In
Proceedings of the AAAI Conference on Artificial
Intelligence, 35(17), 15591–15599.
Lin, P., Van Brummelen, J., Lukin, G., Williams, R., &
Breazeal, C. (2020). Zhorai: Designing a conversational
agent for children to explore machine learning
concepts. In Proceedings of the AAAI Conference on
Artificial Intelligence, 34(09), 13381–13388.
Martin, M., Chevalier, M., Burton, S., Bonvin, G.,
Besançon, M., & Deneux, T. (2023). Effects of
introducing a learning robot on the metacognitive
knowledge of students aged 8-11, Proceedings
Robotics in Education, Cyprus. https://doi.org/10.1007/
978-3-031-38454-7_15
McCombs, B. L. (1991). Motivation and lifelong learning.
Educational Psychologist, 26(2), 117–127.
Kammer, T., Brauner, P., Leonhardt, T., & Schroeder, U.
(2011). Simulating LEGO mindstorms robots to
facilitate teaching computer programming to school
students. In Proceedings of the 6th European
conference on Technology enhanced learning: towards
ubiquitous learning (pp. 196–209). Springer-Verlag.
Kong, S.-C., Cheung, W. M.-Y., & Tsang, O. (2023).
Evaluating an artificial intelligence literacy programme
for empowering and developing concepts, literacy and
ethical awareness in senior secondary students.
Education and Information Technologies, 28(4), 4703-
4724. https://doi.org/10.1007/s10639-022-11408-7
Kong, S.-C., Cheung, W. M.-Y., & Zhang, G. (2022).
Evaluating artificial intelligence literacy courses for
fostering conceptual learning, literacy and
empowerment in university students: Refocusing to
conceptual building. Computers in Human Behavior
Reports, 7, 100223.
Kong, S.-C., & Yang, Y. (2023). Designing and evaluating
an attention-engagement-error-reflection (AEER)
approach to enhance primary school students artificial
intelligence literacy and learning-to-learn skills: A pilot
study. In Proceedings of the 31st International
Conference on Computers in Education Volume II
(pp.394-399), Shimane, Japan.
Olari, V., Cvejoski, K., & Eide, Ø. (2021, May).
Introduction to machine learning with robots and
playful learning. In Proceedings of the AAAI
Conference on Artificial Intelligence, 35(17), 15630–
15639.
Rienties, B., Alcott, P., & Jindal-Snape, D. (2014). To let
students self-select or not: That is the question for
teachers of culturally diverse groups. Journal of Studies
in International Education, 18(1), 64–83.
Sanusi, I. T., Oyelere, S. S., Vartiainen, H., Suhonen, J., &
Tukiainen, M. (2023). A systematic review of teaching
and learning machine learning in K-12 education.
Education and Information Technologies, 28(5), 5967–
5997. https://doi.org/10.1007/s10639-022-11416-7
Learning Robots. (n.d.). The concept AlphAI, the robot
made by Learning Robots. Discover AI. Retrieved
November 23, 2023, from https://learningrobots.ai/the-
concept/?lang=en
Vainikainen, M. P., Wüstenberg, S., Kupiainen, S.,
Hotulainen, R., & Hautamäki, J. (2015). Development
of learning to learn skills in primary school.
International Journal of Lifelong Education, 34(4),
376–392.
Voulgari, I., Zammit, M., Stouraitis, E., Liapis, A., &
Yannakakis, G. (2021). Learn to machine learn:
Designing a game-based approach for teaching
machine learning to primary and secondary education
students. Proceedings of the 20th Annual ACM
Interaction Design and Children Conference, 593–598.
https://doi.org/10.1145/3459990.3465176
Williams, R., Park, H. W., & Breazeal, C. (2019). A is for
artificial intelligence the impact of artificial intelligence
activities on young children’s perceptions of robots.
Conference on Human Factors in Computing Systems -
Proceedings.
https://doi.org/10.1145/3290605.3300677
Zimmerman, M. (2018). Teaching AI: Exploring new
frontiers for learning. International Society for
Technology in Education.
APPENDIX
https://docs.google.com/document/d/1F7mclwYP0s
Yj3T9Fg9IkAmG6SBkN4Bt2uIxISLCLJtc/edit?usp
=sharing
CSEDU 2024 - 16th International Conference on Computer Supported Education
162
