
A Formal Execution Semantics for Sophisticated Dynamic Jumps
Within Business Processes
Thomas Bauer
Hochschule Neu-Ulm, University of Applied Sciences, Wileystr. 1, 89231 Neu-Ulm, Germany
Keywords: Dynamic Jump, Flexibility, Process Engine, Workflow Engine, Run-Time, Execution State.
Abstract: At business processes (BP) execution, in exceptional cases (e.g. to save time or to correct errors), users must
have the possibility to jump forward and backward in the BP. Currently, this topic is hardly respected in
scientific literature and only insufficiently realized by commercial BP engines. This paper develops a formal
execution semantics for dynamic jumps. It does not only respect simple forward and backward jumps within
sequences of activities, but comprehensive requirements as jumps into and out of parallel branches or within
loops. Furthermore, the intended behaviour of concerned activities can be modelled, i.e., they may be caught
up later or their results (output data) may be preserved and reused at their later repeated execution after a
backward jump.
1 INTRODUCTION
In exceptional cases, users of applications that are
based on process management systems (PMS), must
be able to deviate from the modelled business process
(BP) at run-time (Reichert and Weber, 2012). The
project CoPMoF (Controllable Pre-Modelled Flexi-
bility) handles deviations that are pre-modelled al-
ready at build-time (Bauer, 2019, 2020, 2021). This
includes optional edges (Bauer, 2023a) and advanced
control-flow dependencies between activities (Bauer,
2023b). A further topic are dynamic jumps. This
means that the user detects the exceptional situation
and triggers the jump by selecting a target activity.
The process execution continues with this activity,
i.e. a dynamic change (Weber et al., 2008) of this pro-
cess instance is performed. To avoid errors and main-
tain process safety, we consider jumps that are not
completely arbitrary. Instead, the possible source and
target activities, user rights for triggering the jump,
and the intended behaviour were pre-modelled al-
ready at build-time. Since, at run-time, the user is free
to trigger such a jump at any point in time, this is still
a dynamic operation. In (Bauer, 2022) we have intro-
duced dynamic jumps that fulfil sophisticated re-
quirements. That work, however, only describes these
requirements and examples from practice, but no for-
mal execution semantics. In the following, we de-
velop such a semantics that enables a process engine
to control a BP when dynamic jumps occur. This in-
cludes different types of run-time behaviour se-
lectable by the user by defining configuration options,
as well as jumps within complex control flow struc-
tures, e.g. jumps into and out of parallel branches (af-
ter an AND-Split).
A change management process of the automotive
domain (cf. Fig. 1a) is used to demonstrate that dy-
namic jumps are very relevant in practice: An em-
ployee requests the change of a vehicle part (activity
a). Then, a development engineer details the request
(activity b) and rates the costs and effort of this
change (activity c). With the composed activity d, the
following other business domains rate the request in
parallel: After-Sales (d1), Production (d2), Marketing
(d3), and Prototyping (d4). If the project leader de-
cides in activity e to accept the request, it is realized
in activity f. A certain change may be necessary be-
cause of a new law. In this exceptional situation, the
ratings of the activities c and d are not relevant since
the change must be performed anyway. To save time
and effort, after completing activity b, its actor trig-
gers a dynamic forward jump to activity e. Another
exception may be that, during the rating of conse-
quences of the change for prototyping (activity d4),
an actor detects errors made at the execution of activ-
ity b. Therefore, he triggers a backward jump to ac-
tivity b with the result that the errors can be corrected
at its repeated execution. Such jumps are very rele-
634
Bauer, T.
A Formal Execution Semantics for Sophisticated Dynamic Jumps Within Business Processes.
DOI: 10.5220/0012520200003690
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 26th International Conference on Enterprise Information Systems (ICEIS 2024) - Volume 2, pages 634-642
ISBN: 978-989-758-692-7; ISSN: 2184-4992
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

vant in practice, but hardly considered in scientific lit-
erature. Furthermore, commercial PMS enable jumps
only in a very restricted manner (cf. Section 2).
Figure 1: a) Change Management Process (CMP) for Parts
b) A Backward Jump Out of a Parallel Region.
The desired behaviour of a jump can be ambiguous:
Assume the dynamic backward jump to activity a de-
picted in Fig. 1b. It is triggered by the actor of activity
g before starting it. At this point in time, the activity
b of the parallel branch was already finished. After
completion of activity a (i.e. at the forward execution
occurring after the jump), it is not obvious whether
activity b shall be executed again or whether it is pos-
sible to keep its originally created output data. In the
latter case, the time and effort for its repeated execu-
tion can be saved. Activity f belongs to the same
branch as the source activity g of the jump. Again, it
is not clear whether its execution must be repeated.
Furthermore, the execution of the currently running
activity c, that belongs to the other branch, may be
continued or aborted at the jump. The appropriate be-
haviour depends on the question, whether the execu-
tion of activity c is affected by the jump or by the
eventually changed output data of the activities a and
b. We present an execution semantics that allows to
define the desired behaviour of dynamic jumps in
such cases.
Section 2 discusses the state of the art and the re-
sulting research gap. Section 3 summarizes the re-
quirements for jumps. The formal execution seman-
tics is presented in Section 4.
2 STATE OF THE ART
The research gap is identified by analysing literature
and relevant functions of a commercial PMS.
Some publications mention dynamic jumps or
may serve as work-around for their realization. They
are presented in the following since, unfortunately,
1
Business process, Workflow, Process engine - each in
combination with the word Jump - were used when
there does not exist more specific literature concern-
ing sophisticated dynamic jumps.
1
(Russell and Hof-
stede, 2006) present control-flow patterns, but do not
mention dynamic jumps. With the pattern “Arbitrary
Cycles”, however, forward and backward edges can
be modelled. This allows to pre-model edges for
jumps at build-time. The pattern is described only, but
no special behaviour for jumps as catching up by-
passed activities (cf. Section 1) is mentioned.
At (Reichert et al., 2003), expectable jumps are
pre-modelled at build-time and mapped to regular
building blocks of the BP meta model. To enable this,
priorities for activities and edges are introduced. The
result of this mapping is a quite complex process
graph. Since no configuration options are respected,
it cannot be defined, for instance, whether an activity
shall be repeated after a backward jump.
(Reichert and Dadam, 1998) mention dynamic
jumps and special requirements, as catching up
skipped activities. Furthermore, it shall be definable
whether this is possible at any time or only before a
given other activity was started. However, no execu-
tion semantics is presented for such requirements.
Since dynamic jumps are hardly respected in sci-
entific literature, a commercial PMS is analysed as
well: IBM has a long-term experience with such prod-
ucts. Therefore, we assume that their products are at
least similar powerful as others. The first IBM prod-
uct that supported jumps was WebSphere Process
Server 6.1.2 (IBM, 2008), but with many restrictions.
At the current IBM product Business Automation
Workflow (IBM, 2022) jumps are still limited: Jumps
into or out of regions with parallel branches are not
allowed. A reason for this may be that their intended
behaviour can be ambiguous (cf. the example of Fig.
1b). Furthermore, functionality, as catching up by-
passed activities, is not supported.
As explained, there does not exist scientific liter-
ature that handles sophisticated dynamic jumps and
commercial PMS do not support such jumps, as well.
The sole exception is our previous work (Bauer,
2022), but it only describes requirements and presents
examples from practice to show their necessity. The
intended behaviour at BP execution (run-time) is only
described informally by examples. That means, there
does not exist a formal execution semantics for so-
phisticated dynamic jumps. This paper reduces this
research gap by developing and explaining the re-
quired formal execution rules. Before, we explain
why such execution rules are the best way to define a
formal execution semantics.
searching for literature, and additionally: Forward
jump, Backward jump - each combined with Process.
A Formal Execution Semantics for Sophisticated Dynamic Jumps Within Business Processes
635

3 REQUIREMENTS
(Bauer, 2022) introduces requirements for sophisti-
cated jumps including the pre-modelling of such
jumps and the visualization of jump edges. The re-
quirements also contain the definition of configura-
tion options by the BP designer at build-time and their
modification by the user who triggers the jump at run-
time. Now we focus on requirements that are relevant
for the execution semantics presented in Section 4. To
be able to refer to specific requirements, each has an
identifier which indicates its category: Fx = Forward
jump, Bx = Backward jump, Px = Jump into or out of
a Parallel branch, Lx = Jump within a Loop.
3.1 Forward Jumps
A forward jump may happen before its source activity
(the starting point of the jump) is started. The config-
uration option CatchUpMode allows to define
whether this source activity s shall be caught up later
on (Requirement F1: CatchUpMode(s)=true) or
whether it shall be omitted (CatchUpMode(s)=false).
A jump shall be even allowed, when its source activ-
ity s was already started: For the case that catching up
is desired (CatchUpMode(s)=true), the execution of
this source activity continues (despite the jump). Oth-
erwise (CatchUpMode(s)=false) it is aborted. As-
sume for the BP of Fig. 1a that the engineer has al-
ready started the execution of activity c when he de-
tects that this change request is very urgent and trig-
gers the jump to activity e (similar as described in
Section 1). With CatchUpMode(c)=false, activity c is
aborted and the process continues with activity e.
That means, the CatchUpMode defines whether the
source activity of the jump shall be continued or omit-
ted (and therefore aborted, if it is already running).
For bypassed activities (located between the
source and the target activity of the jump) it can be
defined as well, whether they shall be caught up
(F2a). Often these activities shall be omitted (Catch-
UpMode(x)= false) because this is the “normal inten-
tion” of a user when triggering a jump. But it can be
necessary to execute missed activities later on (Catch-
UpMode(x)=true). At the example of Fig. 1a, for each
activity that is bypassed by the jump (activities c and
d1 to d4) it has to be analysed, whether its output data
is required for the further process execution. In such
a case, it must be caught up later on. For example, it
may be necessary to catch up activity d2 since its out-
put data (the comments of the production domain) are
required by activity f to identify the necessary
changes of production machines. Therefore, for each
activity, it can be defined whether it shall be caught
up after a jump (F2a). Furthermore, it can be mod-
elled that catching up must happen before a given ac-
tivity (here: activity f) can be started (F2b).
3.2 Backward Jumps
As explained in Section 1, a backward jump may be
necessary to correct data that was erroneously cap-
tured at a preceding activity t. After the jump, this tar-
get activity t is repeated, and the succeeding process
steps are executed again (now with correct data); i.e.
the backward jump is followed by a “second forward
execution”. It is possible to define how the original
results (output data) of each activity x shall be treated
at this forward execution (Requirement B1):
1. RepeatMode(x)=Discard: Its original results
are discarded and activity x is executed again
(normally) as at its first execution (B1a).
2. RepeatMode(x)=Control: The original output
data of activity x are preserved, but at the later
forward execution, it is executed again. At this,
a form pre-filled with these original data can be
presented to the actor. He has to control these
data and may correct it, if necessary (B1b).
3. RepeatMode(x)=Keep: The activity x is not ex-
ecuted again, i.e. all output data of this activity
stay unchanged (B1c).
At a backward jump, it may be meaningful to abort or
to continue the execution of its source activity s. The
same applies to activities that are located after activity
s in the process graph. Such activities can be even
started. For instance, at the jump depicted in Fig. 1b,
it may be meaningful to complete activity g (the
source activity of the jump) if its output data will not
change because of the backward jump and the follow-
ing forward execution. After completion of activity g,
the activity h may be started despite this jump if it
only depends on the (already correct and in future un-
changed) output data of activity g. These activities g
and h are executed in a “preponed” manner, i.e. ear-
lier than with a “classic process execution” after a
jump. The desired behaviour can be selected with the
configuration option ContinueMode(x) (B2):
1. ContinueMode(x)=Abort (i.e. no Start and no
Completion): The activity x shall be aborted
(automatically) if it is currently executed (B2a).
For instance, it is meaningful to abort activity x
if its results will be discarded anyway at the
later forward execution because of the Repeat-
Mode(x)=Discard (cf. B1a). It is wasted effort
to complete (or even start) the execution of
such an activity.
2. ContinueMode(x)=Complete (i.e. no Start): An
already started activity x can be completed, but
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
636

it must not be started if it is not running yet
(B2b) in order to avoid the loss of already per-
formed work, that perhaps can be reused at the
later forward execution. If ContinueMode(y)
=Complete was selected for the successive ac-
tivity y as well, it cannot be started after the
completion of activity x. This can be meaning-
ful since, until now, activity y was not started,
i.e. no work can be lost.
3. ContinueMode(x)=Start&Complete: With this
ContinueMode, the activity x can be even
started, after completion of its preceding activ-
ity (B2c). This is meaningful if the output data
of activity x will be used later on anyway, e.g.
because of RepeatMode(x)=Keep (cf. B1c).
Then, much time is available for the execution
of this activity x, till the forward execution (af-
ter the backward jump) reaches activity.
At a backward jump, it can be necessary to compen-
sate an activity x that was already executed before the
jump. This is defined with RepeatMode(x)=Compen-
sate (B3); e.g., to revoke an order that was already
sent to a supplier. For this purpose, a “compensation
activity” is modelled and executed at the jump.
3.3 Jumps and Parallel Branches
The presented requirements are especially meaning-
ful for activities of parallel branches: At Fig. 1b, the
actor of activity g (of the lower branch) triggers a
jump, e.g. because he has detected an error within the
process data. If this error does not concern the upper
branch at all, the activity c and its successors can be
continued without causing any problems.
Forward Jump: As described in Section 3.1, the
CatchUpMode defines whether an activity, that was
bypassed by a forward jump, shall be caught up. Now,
this CatchUpMode becomes relevant for activities of
other parallel branches, as well (Requirement P1).
Assume for the process of Fig. 1b, that the actor of
activity c triggers a forward jump to activity i. Fur-
thermore, assume that the execution of activity g has
not started at this time. Then, the CatchUpMode of
the activities g and h (located in parallel to the jump
source activity c) defines whether they shall be caught
up after the jump. As already described in Section 3.1,
the CatchUpMode of the activities c, d, and e (that
belong to the same branch as the source activity c of
the jump) defines whether they are caught up.
Backward Jump: As described in Section 3.2,
for activities that become executable after a backward
jump, again, the RepeatMode defines whether their
original output data shall be discarded, controlled, or
kept, i.e. whether this activity must be repeated in
fact. Now, this RepeatMode becomes relevant for ac-
tivities of parallel branches, as well (Requirement
P2). The backward jump of Fig. 1b was triggered by
the actor of activity g (belonging to the lower branch),
e.g. because of erroneous data created by activity a. If
these data are not used by the already completed ac-
tivity b, it is very meaningful to keep its results.
As already explained, the ContinueMode defines
whether activities, that were not completed when ex-
ecuting the jump, can be started or completed despite.
Now, ContinueMode is relevant for activities that are
located in parallel to the source activity of the jump,
as well: At the example of Fig. 1b, activity c is cur-
rently executed. Since it is located in a parallel
branch, perhaps, it may be not affected by the reason
for this jump at all. Therefore, it is especially mean-
ingful that ContinueMode(c)=Complete allows its
completion. If the same applies to its succeeding ac-
tivities d and e, Start&Complete should be used as
ContinueMode, to allow their preponed execution.
3.4 Jumps Within Loops
A forward jump into a future or a backward jump into
a previous iteration of a loop may be required.
Forward Jump: At a forward jump, it can be
meaningful to skip the remaining activities of the cur-
rent iteration (CatchUpMode=false). But it can be
also desired, that they shall be caught up after the for-
ward jump (CatchUpMode=true). That means, the
CatchUpMode is relevant for loops as well. Forward
jumps into an iteration after the next one are hardly
relevant in practice. If they are required despite, this
can be realized with multiple forward jumps. There-
fore, Requirement L1 only demands a forward jump
to an arbitrary activity of the next loop iteration.
Backward Jumps: Jumps to a previous iteration
of a loop may be required as well, for instance when
an error was made at activity execution of this itera-
tion. The user selects this target activity instance
when triggering the backward jump. Since this error
may have happened at any past activity instance, a
backward jump to an arbitrary iteration of a loop must
be allowed (Requirement L2). Again, RepeatMode(x)
defines whether an activity x shall be repeated at the
subsequent forward execution. ContinueMode(x) de-
fines whether its early execution (at the current and
future loop iterations) is allowed.
4 EXECUTION SEMANTICS
Section 4.1 explains state changes of activity in-
stances occurring at normal process execution, i.e.
A Formal Execution Semantics for Sophisticated Dynamic Jumps Within Business Processes
637
without dynamic jumps, as for instance described in
(Object Management Group, 2011; Reichert and Da-
dam, 1998; Weske, 2019) . In principle, with our ap-
proach, this life-cycle stays unchanged. Section 4.2
presents several additional execution rules that are re-
quired to realize dynamic jumps.
The (also possible) alternative approach, to define
the execution semantics based on an existing formal-
ism (e.g. Petri-nets), was not chosen since commer-
cial BP engines are often based on BPMN and the
corresponding execution rules. For the realization of
dynamic jumps, it shall be only necessary to integrate
the additional execution rules into such a BP engine.
Since they normally are not based on approaches like
Petri-nets, it would be much more difficult to inte-
grate such a formalism.
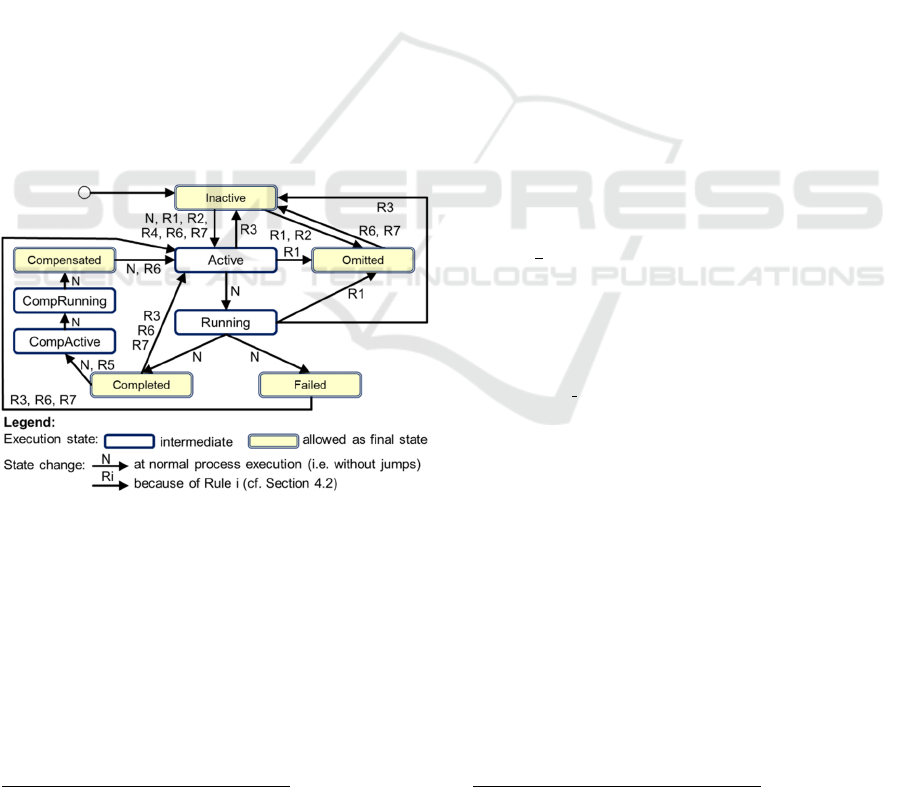
4.1 States of Activity Instances
At classic process execution (i.e. without dynamic
jumps), all activity instances have the state Inactive
(cf. Fig. 2) when a process instance is started. The
state of the start activities of the process (i.e. activities
at the beginning of the process graph) is directly
changed to Active. In general, activities with this state
Active are offered to actors in their worklists.
Figure 2: Execution States of Activity Instances.
Whenever an actor selects an activity for execution,
its state is changed to Running. Its successful comple-
tion results in the state Completed, a completion with
a failure in the state Failed. Whenever an activity
reaches one of these both states, the state of the suc-
ceeding activity is set to Active, with the result that it
can be executed now. In the case of Failed and at Join-
Gateways, it depends on the modelled behaviour,
whether the state of the succeeding activity switches
2
Successor*(x) calculates the activities that are located
indirectly after activity x (without considering loop
to Active, in fact. The corresponding details are omit-
ted here since this behaviour is not changed by dy-
namic jumps.
A user may decide to undo a completed activity,
e.g. to execute it again, later. For this purpose, a com-
pensation activity is executed. The activity state is
changed to CompActive, with the result that the com-
pensation activity is included into the user worklists.
Starting the compensation activity results in the State
CompRunning and its completion in Compensated. In
the case that the regular activity shall be executed
again, now, its state switches to Active, again.
4.2 Execution Semantics at Jumps
This section defines the formal execution semantics
for sophisticated dynamic jumps covering all require-
ments of Section 3. The semantics shall be presented
in a well understandable way. However, to ensure un-
ambiguousness, the execution rules must be described
formally. To increase readability, beforehand, they
are explained in detail.
To avoid unnecessary complexity, aspects that
stay unchanged compared to the normal process exe-
cution (i.e. without dynamic jumps) are omitted, e.g.
the behaviour at AND-, XOR-, and OR-Join-Nodes.
4.2.1 Forward Jumps
For the source activity s of a forward jump, it may be
desired that it shall be caught up (CatchUpMode(s)
=true, cf. Requirement F1). If this applies, State(s)
stays unchanged, to allow that its execution is contin-
ued. Otherwise, activity s may be aborted (if it was
already started) and switches to the state Omitted (cf.
Fig. 2). The target activity t of the jump shall become
executable. Therefore, its state is changed to Active.
A bypassed activity b is marked with the flag By-
passed(b)=true (initially all flags of all activities have
the value false (cf. Table 1 for all flags). The purpose
of the flag Bypassed is that, later on, the BP engine is
able to detect that this activity shall be caught up (cf.
Rule 2). The following execution rule defines this be-
haviour at a forward jump formally:
Rule 1: A forward jump has the source activity s and
the target activity t. The activities B are located be-
tween s and t (i.e. ∀b∈B holds: b∈Successor*(q) ∧
b∈Predecessor*(t)
2
). Then, the following changes are
made at the jump:
State(s) = Omitted, if CatchUpMode(s) = false
State(t) = Active
∀b∈B: Bypassed(b) = true
edges). Predecessor*(x) calculates the activities that are
located indirectly before this activity x.
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
638
Table 1: Flags that influence Activity Execution at Jumps.
Name
initial value
Meaning of the Value true for the
Activity a
Bypassed
false
Activity a was bypassed at a forward jump
and may be caught up later on (if Catch-
UpMode(a) = true holds)
Preponed
false
Act. a was executed in a preponed manner
after a backward jump (a is located behind
the source activity of the
b
ackwar
d
jump)
Jumpe-
Backwards
f
alse
Activity a was bypassed at a backward
jump (it may be already executed regularly
earlie
r
at normal forwar
d
execution
)
UseOld-
Results
false
Activity a was executed regularly and was
located within the area of a backward jump.
This flag signals that existing (old) result
data must be considered at the repeated for-
war
d
execution of activit
y
a
In contrast to the flag Bypassed, Omitted is a new ac-
tivity state. The reason for this decision was that
Omitted can be a final state of an activity instance.
Introducing this state allows to detect that this activity
was omitted, i.e. it was not executed in fact.
The classic execution rules (cf. Section 4.1) must
be modified slightly in order to enable catching up
bypassed activities (Req. F2a): Whenever an activity
p reaches the state Completed, its succeeding activity
a switches to Active, if State(a) was Inactive before.
The last condition is necessary, because catching up
activities will reach the target activity t of the jump
(anytime). This activity t already became startable
(State(t)=Active) immediately after the jump. There-
fore, it does not have the state Inactive anymore.
Since it shall not be executed multiple times, the state
of an activity a is not changed (again) to Active, if
State(a) ≠ Inactive holds (i.e. it was the target of the
jump). Condition (2) in Rule 2 handles this case.
When catching up activities, after completing or
omitting an act. p (the source activity of the jump or
one of its successors), its directly succeeding act. a
becomes executable. The corresponding rule, that
was already sketched in Section 4.1, must be ex-
tended for this purpose: It has to consider that an act.
a must be activated even in the case that its preceding
activity p was omitted due to its CatchUpMode(p)=
false. This can be detected by State(p) =Omitted,
what is respected by the condition (2) of Rule 2.
Rule 2: An activity a has the flag Bypassed(a) = true.
If the following condition holds
(1) State(a) = Inactive and
(2) the preceding activity p of a has reached a State(p)
∈ {Completed, Omitted),
then its state is changed to
State
(
a
)
=
Active, if CatchUpMode
(
a
)
= true holds
Omitted, otherwise
It can be defined for a bypassed activity x that it
shall be caught up before the execution of a different
activity y starts (F2b). In this case, activity y cannot
be started until activity x was finished (successfully
or with a failure). To ensure this behaviour, the rule
for the (normal, cf. Section 4.1) state change from In-
active to Active is extended by this additional condi-
tion:
Rule Extension: Given an activity x with By-
passed(x)=true, which has to be caught up before ac-
tivity y is started. Then, it is only allowed that the
state of activity y changes to State(y) = Active, if
State(x) ∈ {Completed, Failed} holds
.
4.2.2 Backward Jumps
If a backward jump starts at a source activity s that is
currently executable (i.e. State(s)∈{Active, Run-
ning}) its execution is stopped in the case that it has
ContinueMode(s)=Abort (B2a). Its state changes to
State(s) =Inactive. The same state results at Contin-
ueMode(s)=Complete if the execution of activity s
was not started yet, because this mode does not allow
to start an activity (B2b). With this ContinueMode, if
the execution of activity s was already started, how-
ever, its execution shall be continued. Therefore,
State(s) stays unchanged. To enable detecting that
this is a preponed activity execution, activity s is
marked with the flag Preponed(s)=true. The same (i.e.
unchanged State(s) and Preponed(s)=true) results at
ContinueMode(s)=Start&Complete since then, activ-
ity s can be started and executed in a preponed man-
ner, independently of its current state (B2c).
The state of the target activity t of a backward
jump is always changed to State(t)=Active. Then it
can be executed (again). The flag JumpedBack-
wards(t)=true is used to signal that it was located
within the area of a backward jump.
Rule 3: Activity s is the source activity of a backward
jump and activity t is the target activity. Then, the new
state and the Flag Preponed(s) of activity s result as
follows, depending on its original state and Continue-
Mode:
Ori
g
inal State State(s) = Active State(s) = Runnin
g
Continue-
M
ode(s)
=
Abort (B2a)
State(s) = Inactive
Preponed(s)
= false
State(s) = Inactive
Preponed(s) = false
=
Complete
(B2b)
State(s) = Inactive
Preponed(s)
= false
State(s) = Running
Preponed(s) = true
=
Start&Com-
p
lete (B2c)
State(s) = Active
Preponed(s) = true
State(s) = Running
Preponed(s) = true
For the target activity t, these changes are performed:
State(t) = Active, JumpedBackwards(t) = true
A Formal Execution Semantics for Sophisticated Dynamic Jumps Within Business Processes
639

If the preponed execution of an activity a is com-
pleted (State(a)=Complete), its succeeding activity b
may become startable. If this applies, its State(b) is
changed to Active and its flag Preponed(b) is set to
true. However, it is only allowed to start a succeeding
activity b if it has ContinueMode(b) =Start&Com-
plete. Otherwise, its state stays Inactive and its flag
Preponed(b) stays false.
Rule 4: Activity a reaches State(a) = Completed and
Preponed(a) = true holds. Activity b is the succeeding
activity of a. For the case that activity b has Contin-
ueMode(b) = Start&Complete, the following changes
are made: State(b) = Active, Preponed(b) = true
For an activity a that was located within the area
of a backward jump (i.e. between the target activity t
and the source activity s), the behaviour at the subse-
quent forward execution depends on its Repeat-
Mode(a): It may be completely executed once again,
its result data may be controlled, or they may be kept
unchanged (B1). After the backward jump, it shall be
possible to detect whether this activity a, originally,
was completed successfully or whether it failed.
Therefore, its state (Completed or Failed) is not
changed at the backward jump. The flag Jumped-
Backwards(a)=true is used to signal that a backward
jump occurred for this activity. At the later forward
execution, this flag allows to detect that there already
exist result data that have to be controlled or may even
be used directly.
Rule 5: Activity s is the source activity of a backward
jump and t is its target activity. Activity a is located
between t and s (i.e. a ∈ Successor*(t) ∧ a ∈ Prede-
cessor*(s)). Then, JumpedBackwards(a) = true is set.
In case that for an activity a RepeatMode(a)
=Compensate was defined, a compensation activity a'
has to be executed during the backward jump (B3).
For this purpose, State(a) is set to CompActive. Then,
the BP engine executes the compensation activity a',
what results in the State(a)=CompRunning. After
completion of a', State(a) is set to Compensated. To
trigger this behaviour, Rule 5 is extended as follows:
Rule 5 (Continuation): If RepeatMode(a)=Compen-
sate applies in addition, the following state change is
performed: State(a)=CompActive
For an activity a, that is located within the area of
a backward jump, its behaviour at the later forward
execution depends on its RepeatMode(a): (1): With
RepeatMode(a)=Keep, it is not executed again if it
was completed successfully at its original execution,
i.e. if State(a)=Completed was reached (B1c). There-
fore, this state stays unchanged, with the result that
this activity is not offered to actors again, and the suc-
ceeding activity can be started now. (2a): For an ac-
tivity a with RepeatMode(a)=Control, the results, that
were created before the backward jump, are kept
(B1b). At the subsequent forward execution, this ac-
tivity a is started again, therefore, its state is set to Ac-
tive. The old result data shall be re-used and the user
is informed that he has to control and adapt these data
(if necessary). The BP engine detects that this behav-
iour is required, because Rule 6 sets UseOldResults=
true. (After the completion of each activity, this flag
is set to false. Therefore, a further execution, that may
occur in future (e.g. within a loop), occurs regularly.)
(2b): At RepeatMode(a)=Keep, the same behaviour is
desired if activity a was not completed successfully at
its original execution (i.e. State(a)= Failed), since al-
ready created result data may be relevant, neverthe-
less. Therefore, they are not discarded, but controlled
and adapted by the user. (3): An activity a with Re-
peatMode(a)=Discard must be repeated completely at
forward execution (B1a). This is reached by setting
State(a)=Active. All result data, that were created ear-
lier, were discarded because the value of the flag
UseOldResults(a)=false is not changed by Rule 6.
This represents the default behaviour (“otherwise”),
that is also used if activity a was not executed at all,
until now, e.g., because it was located in a not chosen
XOR-Branch (State(a)=Inactive) or since it was by-
passed by a forward jump (cf. Rule 2: State(a) is set
to Omitted). The same applies for an activity a that
was compensated (State(a)= Compensated). In all
presented cases (i.e. 1-3), activity a is treated in a
well-defined manner at the forward execution. There-
fore, the flag JumpedBackwards(a) is set to false
since the (former) backward jump is no longer rele-
vant for the execution of this activity.
Rule 6: For activity a JumpedBackwards(a) = true
holds and its preceding activity p changes its state to
State(p) = Completed. Then, the new state of activity
a results as State(a) =
⎩
⎪
⎪
⎨
⎪
⎪
⎧
Completed, (1) if RepeatMode
(
a
)
=Keep
State
(
a
)
= Completed
Active and UseOldResult
(
a
)
= true is set,
(2a) if RepeatMode
(
a
)
= Control
State
(
a
)
{Completed, Failed}
(2b) RepeatMode
(
a
)
= Keep State
(
a
)
= Failed
Active, (3) otherwise
Furthermore, JumpedBackwards(a) = false is set
Before it is allowed that activity a is started, it
may be necessary to wait until its compensation is fin-
ished (B3). The state CompActive and CompRunning
enable to detect that the compensation was not started
or completed, yet. In both cases, the BP engine waits
until State(a)=Compensated is reached, i.e. the com-
pensation activity was completed. For this purpose,
Rule 6 is extended:
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
640

Rule 6 (Continuation): If State(a) ∈ {CompActive,
CompRunning} holds, none of these changes are per-
formed until State(s) = Compensation is reached
.
After a backward jump, the regular forward exe-
cution may reach a preponed executed activity a (i.e.
Preponed(a) has the value true). Then, the “gap” be-
tween the regular execution of activities (p) and the
preponed executed activities (a) is closed. This case
can be detected at the completion of the regularly ex-
ecuted preceding activity p (State(p)=Completed) by
the fact, that Rule 6 has set JumpedBackwards(p)
=false earlier (cf. Condition (1) in Rule 7). Since its
succeeding activity a now becomes executable in a
regular manner, its flag Preponed(a) is set to false.
3
This has the consequence that even a succeeding ac-
tivity (with any ContinueMode different to
Start&Complete) can be started now.
If for activity p, Preponed(p)=false was set be-
cause of Condition (1) of Rule 7, and its execution
finishes (i.e. State(p)=Completed), the regular for-
ward execution has reached its succeeding activity a,
as well. That means, now, this activity a can be started
regularly. Therefore, Condition (2) of Rule 7 enables
that Preponed(a) is set to false in this case, as well.
The same happens, also because of Condition (2),
with the succeeding activity a' of a, as soon as activity
a finishes. Therefore, an activity a', that was waiting
because of its ContinueMode(a') ∈ {Abort, Com-
plete}, becomes startable; i.e. the whole further pro-
cess can be executed from now on.
4
The way how this “execution” is performed (i.e.
discard, control, or keep the result data) depends on
RepeatMode(a). This mode is respected by Rule 6
and, furthermore, Rule 6 defines the new State(a) of
activity a. A difference, that results from the fact that
this activity is executed in a preponed manner, is that
it may be currently performed by an actor. In this case
(i.e. State(a)=Running), the actor is informed that he
has the possibility to stop activity execution, and start
it afterwards with new input data (created by mean-
while finished preceding activities).
Rule 7: An activity p reaches State(p) = Completed.
For its succeeding activity a Preponed(a) = true holds.
If (1) JumpedBackwards(p) = false or (2) Preponed(p)
= false holds, Preponed(a) = false is set.
3
At the preponed start of activity p (i.e. before the “reg-
ular” process execution reaches this activity), Rule 4
sets Preponed(p)=true. Its succeeding activity a, how-
ever, cannot be started until this activity p was finished.
Therefore, Preponed(a) is still false. This also applies
when activity p is finished, with the result that Rule 7 is
not applicable (because of Preponed(a)=true). Later, for
the case that activity a was executed in a preponed man-
ner as well, and when the regular process execution
State(a) is changed as described by Rule 6.
4.2.3 Jumps Involving Parallel Branches
Jumps into and out of regions with parallel branches
do not result in fundamental changes of the execution
rules. The reason is that even behaviour, that is espe-
cially useful for parallel branches, was already re-
spected for “normal” forward and backward jumps.
For instance, continuing the execution of the source
activity s of a backward jump is also allowed without
parallelism. This behaviour, however, is especially
meaningful for activities that are located in branches
that are executed in parallel to the source activity s of
the jump (e.g. activity c in Fig. 1b). Perhaps, these
activities are not affected by the problem that caused
the backward jump. Therefore, it is meaningful to
continue their execution (in a preponed manner).
That means, the Rules 1 to 7 already define the
behaviour that is required for parallel branches, in
principle. However, it is necessary to extend these
rules in such a way that several source and target ac-
tivities of a jump are respected (i.e. sets S and T of
activities). Furthermore, the rules must consider that
all activities belong to the area of a jump (e.g. they
were bypassed) that are located between an arbitrary
source activity s∈S and an arbitrary target activity
t∈T. This results in changes for the Rules 1, 3, and 5
since they directly refer to the source activity s or the
target activity t of a jump.
Rule 1': S is the set of source activities and T the set
of target activities of a forward jump. The activities B
are located between any activities that belong to S and
T (i.e. ∀b∈B holds: ∃s∈S, ∃t∈T with b∈Succes-
sor*(s) ∧ b∈Predecessor*(t)). Then, the following
changes are made at the jump:
∀s∈S: State(s) = Omitted, if CatchUpMode(s) = false
∀t∈T: State(t) = Active
∀b∈B: Bypassed(b) = true
Rule 3': S is the set of source activities and T the set
of target activities of a backward jump. Then, the new
state and the flag Preponed of all activities s∈S result
as defined by Rule 3.
For the target activities t∈T, these changes are per-
formed: State(t)=Active, JumpedBackwards(t) =true
reaches this activity, Preponed(a) was already set to true
(by Rule 4). Therefore, Rule 7 becomes applicable
now.
4
Rule 7 assigns the initial value Preponed(a)=false to all
activities, again. Rule 6 makes the same with Jumped-
Backwards(a)=false, i.e. all original values are restored.
Therefore, a further dynamic jump or a loop iteration
can be performed without requiring any special actions.
A Formal Execution Semantics for Sophisticated Dynamic Jumps Within Business Processes
641

Rule 5': S is the set of source and T the set of target
activities of a backward jump. Activity a is located
between activities that belong to S and T (i.e. for a
holds: ∃s∈S, ∃t∈T with a∈Successor*(t) ∧ a∈Prede-
cessor*(s)). Then, JumpedBackwards(a)= true is set.
4.2.4 Jumps Within Loops
An activity a that is located within a loop may be ex-
ecuted multiple times. Each of these executions rep-
resent a separate activity instance that possesses its
own activity state (cf. Fig. 2) These instances can be
distinguished by using a consecutive number (itera-
tion counter) in addition to the activity name. Such a
composite identifier allows to identify an activity in-
stance unambiguously, e.g. in the process history.
Jumps within loops (Requirements L1 and L2)
can be realized by modifying the presented rules
slightly: In addition to the “normal” control flow
edges, the loop edge that is used at this jump, must be
respected when the (indirect) predecessors and suc-
cessors of an activity are calculated. Since the rules
stay almost unchanged, in the following, they are not
repeated but only the changes are explained.
Rule 1' must also respect loop edges, when calcu-
lating the activities that are located between S and T.
Therefore, instead of the function Successor*(s), Suc-
cessor
L
*(s) is used. The latter additionally respects
the loop edge that was used for this jump. Likewise,
Predecessor
L
*(t) is used instead Predecessor*(t).
When calculating the preceding activity p, Rule 2
has to respect the loop edge, as well.
To realize Requirement L2, similar adaptations
result for backward jumps: As already described for
Rule 1', Rule 5' uses Successor
L
*(t) and Predeces-
sor
L
*(s). As described for Rule 2, the Rules 4, 6, and
7 must additionally respect the loop edge when calcu-
lating the preceding or succeeding activity.
5 SUMMARY AND OUTLOOK
Dynamic jumps, triggered by users at run-time, ena-
ble an appropriate reaction in exceptional cases. For
instance, it may be necessary to jump forward within
a BP to save time by skipping activities. Backward
jumps may be required to correct errors made at the
execution of previous activities. To keep process
safety, instead of arbitrary jumps, the presented ap-
proach uses pre-modelled jumps. The behaviour of
concerned activities is definable by configuration op-
tions. They allow to specify, for instance, whether ac-
tivities that are bypassed by a forward jump must be
caught up later on, e.g. since output data are required
by succeeding activities. Because of this flexibility,
this approach becomes applicable in many scenarios.
This paper presents a formal execution semantics,
based on execution rules for state changes of activity
instances. In addition, flags of activity instances were
used by these rules, in order to avoid the definition of
many additional activity states (one for each combi-
nation of relevant flag value and each state).
The execution rules enable the realization of a BP
engine that offers sophisticated jumps. In future, usa-
bility of the presented approach has to be evaluated
based on a (prototypical) implementation of such a
BP engine. It shall be used to evaluate whether the
users are able to handle the presented concepts, and
whether they are really useful and sufficient.
REFERENCES
Bauer, T., 2023a. Behaviour and Execution Semantics of
Optional Edges in Business Processes. Proc. Informatik
2023, ZuGPM-Workshop (in German).
Bauer, T., 2023b. Modelling of Advanced Dependencies
Between the Start and the End of Activities in Business
Processes. Proc. ICEIS 457–465.
Bauer, T., 2022. Requirements for Dynamic Jumps at the
Execution of Business Processes. Proc. 12th Int. Symp.
on Business Modeling and Software Design 35–53.
Bauer, T., 2021. Pre-modelled Flexibility for the Control-
Flow of Business Processes, in: Enterprise Information
Systems. Springer, pp. 833–857.
Bauer, T., 2020. Business Processes with Pre-designed
Flexibility for the Control-Flow. Proc. ICEIS 631–642.
Bauer, T., 2019. Pre-modelled Flexibility for Business Pro-
cesses. Proc. ICEIS 547–555.
IBM, 2022. Business Automation Workflow 22.x. https://
www.ibm.com/docs/en/baw/22.x (accessed 11.10.23).
IBM, 2008. WebSphere Process Server Knowledge Center.
https://www.ibm.com/support/knowledgecenter
/SSQH9M_7.0.0 (accessed 7.15.18).
Object Management Group, 2011. Business Process Model
and Notation (BPMN) 2.0.
Reichert, M., Dadam, P., 1998. ADEPTflex - Supporting
Dynamic Changes of Workflows Without Losing Con-
trol. J. Intelligent Information Systems 10, 93–129.
Reichert, M., Dadam, P., Bauer, T., 2003. Dealing with For-
ward and Backward Jumps in Workflow Management
Systems. Software and Systems Modeling 2, 37–58.
Reichert, M., Weber, B., 2012. Enabling Flexibility in Pro-
cess-Aware Information Systems. Springer.
Russell, N., Hofstede, A.H.M., 2006. Workflow Control-
Flow Patterns. BPM Center Report BPM-06-22.
Weber, B., Reichert, M., Rinderle-Ma, S., 2008. Change
Patterns and Change Support Features. Data and Know-
ledge Engineering 66, 438–466.
Weske, M., 2019. Business Process Management: Con-
cepts, Languages, Architectures, 3rd ed. Springer.
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
642
