
Conformance Checking on Timed Automaton Process Models
Sohei Ito
1 a
and Kento Hamae
2
1
School of Information and Data Sciences, Nagasaki University, 1-14 Bunkyo-machi, Nagasaki City, Japan
2
FCC Techno, 4-25-30 Ohashi, Minami-ku, Fukuoka City, Japan
Keywords:
Conformance Checking, Timed Automaton, Business Process Model, Process Mining.
Abstract:
Conformance checking is a kind of process analysis methods that evaluate the difference between modeled
behavior and recorded behavior of a process. Usual conformance checking evaluates such difference (called
fitness) based on only the order of executed tasks. Therefore, one cannot correctly evaluate fitness for process
executions that violate the task completion time required by the model. In this paper, we consider process
models with time constraints given as timed automata, and propose a method for evaluating fitness of timed
traces with timed automaton process models. We implement two algorithms to compute the fitness we pro-
posed, namely a naive exhaustive search and A* algorithm, and show experimental results with simple process
models.
1 INTRODUCTION
A process is a collection of tasks (or activities) or-
ganized to achieve a certain goal. Processes appear
everywhere, and business processes in particular are a
prime example. Since organizations are usually com-
posed of many business processes, improving their
efficiency is one of the social issues that have been
addressed over the years.
A method called process mining (van der Aalst,
2016) has been attracting attention for the systematic
design, evaluation, and improvement of business pro-
cesses. Process mining is a collective term for meth-
ods that use process models and process execution
records (called event logs) to perform various analy-
ses. Event logs come from many sources: a database
system such as patient data in a hospital, a transaction
log of a trading system, an ERP system, etc.
Conformance checking is one of the methods of
process mining. It quantitatively evaluate how well a
process model conforms to the actual behavior (i.e.
event log). Process models are usually obtained
through various abstractions, and thus it is not un-
common for errors to be introduced during the mod-
eling process. Moreover, processes themselves vary
due to changes in the environment and technological
updates. For these reasons, conformance checking is
useful to analyze the difference between the model
and the process executions.
a
https://orcid.org/0000-0002-7029-664X
Several methods have been proposed for confor-
mance checking (Weidlich et al., 2011a; Zha et al.,
2010; Weidlich et al., 2011b; Polyvyanyy et al., 2014;
Rozinat, 2010; vanden Broucke et al., 2014b; vanden
Broucke et al., 2014a; Adriansyah, 2014; Adriansyah
et al., 2011a; Adriansyah et al., 2011b; van der Aalst
et al., 2012). However, these methods only use ac-
tivity names for conformance checking, and thus only
interested in whether the order of activities conform to
the model. In general, however, event logs contain a
lot of information, such as timestamps for each activ-
ity and unique attributes for each activity type (e.g.,
“price” for the activity “send quote”). If a process
model determines its behavior depending on such at-
tributes, it is desirable to check conformance consid-
ering not only the order of activities but also attribute
values of activities. For example, in a negotiation pro-
cess in a trading company (e.g. (Ito et al., 2018)),
a salesperson should send a quote within a set time
limit, and the quoted price should be within a reason-
able bound. It is desirable to check conformance of
such constraints besides the correctness of task exe-
cution order.
Therefore, we propose a method for checking con-
formance between process models with the time at-
tribute and timed traces (a trace is an execution of a
process). The reason why we only focus on the time
attribute is that almost all event logs contain times-
tamps. For the formalism of process models, we adopt
the timed automaton. We regard locations of a timed
Ito, S. and Hamae, K.
Conformance Checking on Timed Automaton Process Models.
DOI: 10.5220/0012548800003690
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 26th International Conference on Enterprise Information Systems (ICEIS 2024) - Volume 2, pages 545-556
ISBN: 978-989-758-692-7; ISSN: 2184-4992
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
545
automaton as activities. Traces are sequences of pairs
of an activity and a timestamp (i.e. completion time
of the activity), that is, an event log consists of timed
traces. Since an execution of a timed automaton is
a sequence of pairs of locations and times, we can
naturally regard timed traces as executions of a timed
automaton.
Our proposed method of conformance checking
consists of two steps. The first step is to evaluate con-
formance based only on the order of activities. We
call this the order fitness, which takes a value be-
tween 0 and 1. For this, we adjust an alignment-based
conformance checking proposed for Petri net models
(Adriansyah et al., 2011b) to finite automaton mod-
els. This method finds a matching between an model
execution and a trace. The next step is to evaluate
the time fitness (also takes a value between 0 and 1)
of the matching. The time fitness, which we newly
define, evaluates how well the timestamps in a trace
conform to the constraints given in the model.
The alignment-based method searches the optimal
model execution (the execution having the smallest
difference from the trace) to compute fitness values.
Although there are several such optimal executions in
general, they all have the same order fitness value.
However, as we see later, such optimal executions
possibly have different time fitness values. Therefore,
if one wants to find the best time fitness value, one
needs to search all possible optimal executions. Such
exhaustive search may be computationally expensive
if a model is large. Therefore, we implement A* algo-
rithm as a more efficient algorithm, which is also used
in (Adriansyah et al., 2011b), as well as a naive ex-
haustive search algorithm and compare the difference
of performance and the obtained best fitness values
using simple process models as an experiment.
This paper is organized as follows: Section 2 gives
a technical preliminary. Section 3 formally defines
the fitness of our conformance checking on timed
automaton process models. Section 4 states the al-
gorithms to compute the fitness values. Section 5
presents experimental results of the proposed method.
Section 6 gives related work. The final section con-
cludes the paper.
2 PRELIMINARY
In this section, we formally define the event log and
the timed automaton process model. An event log is
a record or a history of executions of a process. An
event log consists of many cases. A case is an in-
stance of a process and corresponds to a sequence of
events (trace). An event consists of an activity and
several attributes. In this paper, the only attribute we
consider is the timestamp. Each event occurs in only
one case.
Let A be the set of activities.
Definition 1 (Event log). L
A
= (E,C,α,β,τ,≻) is an
event log over the set A of activities, where E is a
set of events, C is a finite set of cases, α : E → A is a
function that assigns an activity to each event, β : E →
C is a function that relates events to cases, τ : E →
R
≥0
is a function that gives the timestamp of an event,
and ≻⊆ E ×E is a strict total order on E. Let ℓ ∈ C be
a case identifier. We write E
ℓ
for the trace of ℓ, which
is a sequence of events ⟨e
1
,.. .,e
|E
ℓ
|
⟩, where β(e
i
) =
ℓ ⇔ e
i
∈ E
ℓ
for all 1 ≤ i ≤ |E
ℓ
| and e
i
≻ e
j
for all
1 ≤ i < j ≤ |E
ℓ
|. We extend α to a sequence of events,
i.e., α(E
ℓ
) = ⟨α(e
1
),.. .,α(e
|E
ℓ
|
)⟩ is the sequence of
activities obtained from E
ℓ
. We write last(E
ℓ
) for the
last event of E
ℓ
, namely e
|E
ℓ
|
.
The process model is formally defined as a timed
automaton.
Definition 2 (TA-model). A timed automaton pro-
cess model (TA-model in short) is given as a tuple
(L,l
0
,z,A,t,T,γ) where L is a finite set of locations,
l
0
∈ L is the initial location, z ∈ L is the final lo-
cation, A is a finite set of activities, t is a clock,
T ⊆ L × B(V ) × L is a set of transitions, B(V ) is a
set of clock constraints (guards) given as an interval
d
1
< t < d
2
(d
1
,d
2
∈ R
≥0
), and γ : L → A is a function
that assigns an activity to each location. For a transi-
tion (p,g,q) ∈ T , we denote G(p, q) = g. There is no
s ∈ L and g ∈ B(V ) such that (z,g,s) ∈ T , i.e., there is
no successor location of z.
We give an example process model in Figure 1.
s
1
a
s
2
b
s
3
c
s
4
d
0 < t < 3 1 < t < 5
2 < t < 7
5 < t < 10
Figure 1: An example process model. Locations are rep-
resented as circles, where location names are written above
and activity names are written below. The guards of transi-
tions are written above arrows.
Definition 3 (Execution). An execution of
a TA-model (L,l
0
,z,A,t,T,γ) is a sequence
⟨(l
0
,t
0
),(l
1
,t
1
),.. .,(l
n
,t
n
)⟩, where l
0
is the ini-
tial location, l
n
= z (i.e. the final location), and for
all 1 ≤ i < n, (l
i
,g
i
,l
i+1
) ∈ T and t
i
satisfies g
i
.
For example, ⟨(s
1
,1),(s
2
,2),(s
3
,6),(s
4
,8)⟩ is an
execution of the model in Figure 1.
An execution ⟨...(l
i
,t
i
),(l
i+1
,t
i+1
),.. .⟩ means
that the process finishes the activity of l
i
at time t
i
and
moves to location l
i+1
. Therefore, the timestamp of
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
546

the final location is not constrained by any guard (be-
cause there is no transition from it). One may regard
the activity in the final location as just a mark of the
end of the process.
For a TA-model M = (L,l
0
,z,A,t,T,γ), we can ob-
tain an ordinary finite automaton model (called FA-
model) M
′
= (L,l
0
,z,A, T
′
,γ) by forgetting the clock
and guards. That is, T
′
⊆ L × L is obtained from T by
ignoring guards.
Let M = (L,l
0
,z,A, T, γ) be a FA-model. A se-
quence σ = ⟨s
0
,s
1
,...,s
n
⟩ is said to be an execution
of M if s
0
= l
0
, s
n
= z, and for all i ∈ {0,..., n − 1},
(s
i
,s
i+1
) ∈ T . We write exe(M) for the set of execu-
tions of M.
Before concluding this section, we give some re-
marks about our definitions. In the standard definition
of the timed automaton, it has possibly many clocks,
and a transition has a set of clocks to be reset. This
means that when a transition takes place, the clocks
in the set are reset to 0 (in general, they can be as-
signed arbitrary values). We could include the reset
of clocks in our definition of the TA-model. In our
setting, however, reset is not important because we
are not interested in executing the model but in eval-
uating fitness between the model and the execution,
for which only guards on transitions matter. With the
reset of clocks, the values of timestamps in an exe-
cution do not necessarily increase: for example, the
trace ⟨(s
1
,5),(s
2
,3),. ..⟩ is completely fine as an ex-
ecution of TA-model in Figure 1. We can interpret
such execution that the clock was reset between the
activity a and b.
Another device that the standard timed automaton
has is the invariant. Each location has an invariant,
which is a condition for the system to stay in the lo-
cation. For example, if the location s
2
in Figure 1 has
the invariant t < 5, the system can stay at s
2
as long as
t < 5 (and thus if t ≥ 5, the system must exit s
2
). For
evaluating fitness, one may also be interested in how
much the invariants are satisfied during the execution.
For simplicity, however, we omit the invariants be-
cause they can be treated similarly to the guards.
The definition of executions of a TA-model also
differs from the standard definition of runs of a timed
automaton. In the standard definition, runs are just
a sequence of the pair of locations and valuations
of clock ⟨(l
0
,u
0
),(l
1
,u
1
),.. .⟩, where (l
i+1
,u
i+1
) can
be obtained from (l
i
,u
i
) by two possible transitions:
the delay transition and the action transition. The
delay transition represents that the system stays at
the same location for some time (thus, l
i+1
= l
i
).
On the other hand, the action transition makes the
system to change its location according to the tran-
sition T and does not cause a time lapse. Thus,
l
i+1
is one of the successors of l
i
in the automa-
ton. Therefore, ⟨(s
1
,0),(s
1
,1.5),(s
2
,1.5),(s
2
,4),. ..⟩
is a run of the timed automaton in Figure 1,
but ⟨(s
1
,1),(s
2
,2),(s
3
,6),(s
4
,8)⟩ is not because
(s
1
,1) → (s
2
,2) is neither the delay transition nor the
action transition. In our setting, we regard a trace
in an event log as an execution of a process model,
which is a sequence of events ⟨e
1
,e
2
,.. .⟩ and each
event e
i
is a pair (a
i
,t
i
), where a
i
is an activity and
t
i
is a timestamp. Therefore, we adopt such traces as
executions of a TA-model.
3 CONFORMANCE CHECKING
ON TIMED AUTOMATON
PROCESS MODELS
Conformance checking is a method for evaluating the
difference between an event log and a process model.
The difference is evaluated by the fitness, which is
expressed as a value between 0 and 1. If the event
log and the process model do not match at all, the
fitness value is 0, and if they match perfectly, the fit-
ness value is 1. If the finesses is greater than 0 and
less than 1, there are two possible interpretations. (1)
There is a problem on the process model side. The
actual business process is not correctly modeled, i.e.,
there is room for improvement in the process model.
(2) There is a problem on the event log side. The ac-
tual execution of the process contains some kind of
violation, i.e., the operations are not being performed
as assumed in the process model. In this case, it may
lead to the discovery of inefficient operations.
In this section, we give a method for evaluating
the fitness between a TA-model M = (L,l
0
,z,A,t,T,γ)
and a trace E
ℓ
in an event log L
A
= (E,C,α,β, τ,≻).
The steps for this is as follows:
1. Find an optimal alignment between M
′
(FA-model
obtained from M) and α(E
ℓ
) (the sequence of ac-
tivities obtained from E
ℓ
), then compute the fit-
ness value of the alignment (we call it the order
fitness).
2. For the alignment obtained in Step 1, we com-
pute the time fitness by evaluating how much the
guards are satisfied in it.
3. We take the average of the order and time fitness
values obtained in Step 1 and 2, respectively, as
the fitness value between M and E
ℓ
.
The order fitness can be obtained by adjusting the
definition of the fitness based on alignments of Petri
net models proposed in (Adriansyah et al., 2011b).
We will define the time fitness by quantitatively eval-
Conformance Checking on Timed Automaton Process Models
547

uate how much the timestamps deviate from the inter-
vals given as guards in Section 3.2.
For the fitness between M and L
A
(the entire event
log), we take average of the fitness between M and E
ℓ
for all ℓ ∈ C, as usual.
3.1 Order Fitness
In this section, we formally define the order fitness
between a FA-model and a trace.
First, we introduce instances of FA-models. An
instance is a straight line automaton that corresponds
to an execution of an automaton.
Definition 4. Let M = (L,l
0
,z,A, T, γ) be a FA-model
over the activity set A. An instance I = (LI,TI,ρ) of
M is defined as:
• LI is a set of location instances,
• TI ⊆ LI × LI is a set of transition instances,
• ρ : LI → L assigns location instances to locations
in L,
where I satisfies the following:
1. for all (x, y) ∈ TI, (ρ(x),ρ(y)) ∈ T,
2. for all x ∈ LI, |succ(x)| ≤ 1,
3. for all x ∈ LI, if |pred(x)| = 0 then ρ(x) = l
0
,
where succ(x) = {x
′
| (x,x
′
) ∈ T }, pred(x) =
{x
′
| (x
′
,x) ∈ T }.
Example 1. Let I = (LI, TI, ρ),
where LI = {s
′
1
,s
′
2
,s
′
3
,s
′′
2
,s
′′
3
,s
′
4
}, TI =
{(s
′
1
,s
′
2
),(s
′
2
,s
′
3
),(s
′
3
,s
′′
2
),(s
′′
2
,s
′′
3
),(s
′′
3
,s
′
4
)}, ρ = [s
′
1
7→
s
1
,s
′
2
7→ s
2
,s
′′
2
7→ s
2
,s
′
3
7→ s
3
,s
′′
3
7→ s
3
,s
′
4
7→ s
4
]. Then,
I is an instance of the FA-model of Figure 1, which
corresponds to the execution ⟨s
1
,s
2
,s
3
,s
2
,s
3
,s
4
⟩.
Note that instances may correspond to partial ex-
ecutions, which do not end at the final location.
If an instance of a FA-model matches a trace, we
call it a matching instance, which is formally defined
as:
Definition 5 (Matching instance). Let L
A
=
(E,C,α, β,τ,≻) be an event log over the activ-
ity set A and ℓ ∈ C. Let E
′
be a prefix of E
ℓ
. Let
M = (L,l
0
,z,A, T, γ) be a FA-model and I = (LI,TI,ρ)
be an instance of M. Let µ : E
′
⇁ LI be a partial
function that assigns events to location instances,
and µ induces the bijection from dom(µ) ⊆ E
′
to
rng(µ) ⊆ LI. If the following two conditions hold,
I is said to match E
′
by µ and is called a matching
instance:
1. for all e
1
,e
2
∈ dom(µ), if there is a path from
µ(e
1
) to µ(e
2
) in I, then e
1
≻ e
2
,
2. for all e ∈ dom(µ), ρ(µ(e)) ∈ {s ∈ L | γ(s) =
α(e)}.
For an event e, we denote loc(e) = ρ(µ(e)). This
means that in the matching instance, the execution of
the event e is regarded as the execution of the activity
of the location loc(e) in the model. For p
′
∈ LI, we
write next(p
′
) for the unique q
′
such that (p
′
,q
′
) ∈ TI
if it exists.
The condition 1 says that the order of events in
the prefix is preserved in the instance. The condition
2 says that an event in the prefix and its corresponding
location (related through maps µ and ρ) must have the
same activity.
We write (I
E
′
,µ) for a matching instance that
matches the trace E
′
by µ (I
E
′
is an automaton in-
stance), and write J
E
′
for the set of all such instances.
Example 2. Let I = (LI,TI,ρ) be the automaton in-
stance in Example 1. Let E
1
= ⟨e
1
,e
2
,e
3
,e
4
,e
5
⟩,
where α(e
1
) = a, α(e
2
) = b, α(e
3
) = c, α(e
4
) = b
and α(e
5
) = d. Let µ
1
= [e
1
7→ s
′
1
,e
2
7→ s
′
2
,e
3
7→
s
′
3
,e
5
7→ s
′
4
]. Then, (I,µ
1
) is a matching instance. Let
E
2
= ⟨e
1
,e
2
,e
5
⟩ and µ
2
= [e
1
7→ s
′
1
,e
2
7→ s
′
2
,e
5
7→ s
′
4
].
Then, (I, µ
2
) is also a matching instance.
In Example 2, we can see e
4
/∈ dom(µ
1
). This
is interpreted that the event e
4
is inserted in the ex-
ecution of the process, i.e., e
4
should not have been
executed. On the other hand, s
′
3
̸∈ rng(µ
2
). This is
interpreted that the activity c (related to the location
s
′′
3
) is skipped in the execution of the process, i.e., c
should have been executed. Therefore, matching in-
stances can represent the difference between a trace
and a model execution, which is quantitatively evalu-
ated as the order fitness.
Definition 6 (Order fitness). Let M = (L, l
0
,z,A, T, γ)
be a FA-model over the activity set A. Let E
ℓ
be a
trace from an event log L
A
= (E,C, α,β,τ, ≻). Let I =
(LI, TI, ρ) be an automaton instance of M and (I,µ)
be a matching instance. Let LI
s
= LI − rng(µ) and
E
i
ℓ
= E
ℓ
− dom(µ). Furthermore, let κ
s
: A → N
>0
and κ
i
: A → N
>0
be functions that give the skip costs
and the insert costs of activities, respectively. Then,
the order fitness of (I, µ) is defined as:
f
order
= 1 −
cost
base
,
where
cost =
∑
s
′
∈LI
s
κ
s
(γ(ρ(s
′
))) +
∑
e∈E
i
ℓ
κ
i
(α(e)),
base = min
σ∈exe(M)
∑
s∈σ
κ
s
(γ(s)) +
∑
e∈E
ℓ
κ
i
(α(e)).
In this definition, the set LI
s
represents the set
of skipped activities in the trace E
ℓ
that should have
been executed according to the model, and the set
E
i
ℓ
represents the set of inserted events in the trace
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
548

E
ℓ
that should not have been executed according to
the model. We call such mismatches of the model
execution and the trace execution as misalignments.
To each activity the costs representing the penalty of
skipping and inserting are assigned by functions κ
s
and κ
i
, respectively. The value base is the sum of the
minimal skip cost of model executions (regarded as
all model activities are skipped) and the insert cost
of the trace (regarded as all trace activities are in-
serted). This is the worst cost among the possible
alignments between the model and the trace. The
value cost take weighted sum for each misalignment,
where each weight is either the skip cost or the insert
cost. Therefore, the order fitness is 1 minus the ra-
tio of the cost of misalignments to the worst cost. If
there is no misalignment, the order fitness is 1, and
if the model does not match the trace at all, the order
fitness is 0. Therefore, the order fitness necessarily
takes a value between 0 and 1.
3.2 Time Fitness
In this section, we formally define the time fitness be-
tween a TA-model and a trace. We quantitatively eval-
uate how much a given matching instance satisfies the
time constraints specified in the model.
As in the definition of the TA-model, we only con-
sider guards of the form l < t < u. For the guard g of
the form l < t < u, we define g = l and g = u.
Definition 7 (Time fitness). Let M =
(L,l
0
,z,A,t,T,γ) be a TA-model over the activ-
ity set A. Let E
ℓ
be a trace from an event log
L
A
= (E,C, α,β,τ, ≻). Let I = (LI,TI,ρ) be an
automaton instance of M
′
(the FA-model obtained
from M) and (I,µ) be a matching instance. Let
D = dom(µ) −{last(E
ℓ
)}. If D is non-empty, the time
fitness of (I, µ) for M is defined as:
f
time
=
1
|D|
∑
e∈D
f (e)
F(e)
where
f (e) = G(loc(e), loc(next(e))
− G(loc(e),loc(next(e))
F(e) = max(τ(e),G(loc(e), loc(next(e))),
− min(τ(e),G(loc(e),loc(next(e))).
If D is empty, f
time
= 1.
We give an intuitive explanation of this definition.
Suppose the execution of the event e in the trace corre-
sponds to the execution of location p in the model and
the guard of the corresponding transition is l < t < u
(note that although there are possibly multiple tran-
sitions from p, the location corresponding to the next
event next(e) in the matching instance uniquely deter-
mines the transition). Then, the timestamp recorded
in e is τ(e). If l < τ(e) < u, the guard of this tran-
sition is satisfied. In this case, f (e) = u − l and
F(e) = max(τ(e), u) − min(τ(e),l) = u − l. Hence,
we have
f (e)
F(e)
= 1, that is, the execution of e perfectly
conforms to the model. On the other hand, if τ(e) < l,
then F(e) = u −τ(e), and thus
f (e)
F(e)
=
u−l
u−τ(e)
< 1. The
smaller τ(e) becomes than l, the smaller the value
of
f (e)
F(e)
is, which results in smaller f
time
. For exam-
ple, suppose l = 10 and u = 20. If τ(e) = 5 then
20−10
20−5
=
10
15
=
2
3
. If τ(e) = 0, then
20−10
20−0
=
10
20
=
1
2
.
Therefore, simply speaking, the value
f (e)
F(e)
is the ratio
of the length of the interval to the sum of the length
of the interval and the distance between τ(e) and the
interval.
The average of this value for each event in the
trace is the time fitness f
time
of the matching instance.
Example 3. We consider the TA-model in Figure 1
and the trace ⟨(a, 2),(b,6), (c,7),(b,9), (d,10)⟩.
Let the matching instance ((LI,TI, ρ),µ)
be as follows: LI = {a
′
,b
′
,c
′
,b
′′
,c
′′
,d
′
},
TI = {(a
′
,b
′
),(b
′
,c
′
),(c
′
,b
′′
),(b
′′
,c
′′
),(c
′′
,d
′
)},
ρ(a
′
) = s
1
, ρ(b
′
) = ρ(b
′′
) = s
2
, ρ(c
′
) = ρ(c
′′
) = s
3
,
ρ(d
′
) = s
4
. µ((a,2)) = a
′
,µ((b,6)) = b
′
,
µ((c,7)) = c
′
, µ((b,9)) = b
′′
, µ((d, 10)) = d
′
. There
is no activity corresponding to c
′′
in LI; the activity
c is skipped once in the trace. Then, we have D =
dom(µ) − {last(E)} = {(a,2),(b, 6),(c,7), (b, 9)}.
The value of the time fitness of this instance is:
1
4
max(0,3) − min(0,3)
max(2,3) − min(2,0)
+
max(1,5) − min(1,5)
max(6,5) − min(6,1)
+
max(2,7) − min(2,7)
max(7,7) − min(7,2)
+
max(1,5) − min(1,5)
max(9,5) − min(9,1)
=
1
4
(1 + 0.8 +1 +0.5) = 0.825
In the above example, the activity c is skipped in
the trace, which is not taken account in the computa-
tion of the time fitness value. In general, misaligning
events and activities in the matching instance are not
taken into account in the computation of the time fit-
ness value. This is because such misalignments are
taken into account in the order fitness. Another reason
is that we cannot give reasonable timestamp values to
such misalignments due to lack of corresponding tran-
sitions. Our treatment of misalignments is similar to
Conformance Checking on Timed Automaton Process Models
549

Leoni et al.’s conformance checking (de Leoni et al.,
2012), which compares attribute values specified in
the model with recorded values in the trace.
When a timestamp takes the value precisely equal
to a boundary value of a guard, the time fitness value
for such event is evaluated to 1. In the above exam-
ple, for the third event (c,7) in the trace, its time fit-
ness value is
max(2,7)−min(2,7)
max(7,7)−min(7,2)
= 1. Since the guard
is 2 < t < 7 and the timestamp is 7, this event does
not logically satisfy the guard. In practice, however,
the probability that the timestamp precisely takes a
boundary value can be negligible. Moreover, al-
though both cases t = 7 and t = 7 + 10
−100
are log-
ically false, we can think that both cases conform to
the model almost equally. Therefore, we defined that
if the timestamp takes a boundary value of a guard,
the corresponding fitness value is 1.
3.3 Total Fitness
The total fitness of a matching instance is the average
of the order fitness value and the time fitness value of
the instance.
Definition 8 (Total fitness). Let M =
(L,l
0
,z,A,t,T,γ) be a TA-model over the activ-
ity set A, M
′
= (L,l
0
,z,A, T
′
,γ) be the FA-model
obtained from M. Let L
A
= (E,C, α,β,τ, ≻) be an
event log and E
ℓ
be a trace of a case ℓ ∈ C. Let (I,µ)
be a matching instance of E
ℓ
and M
′
. Let f
order
and
f
time
be the order fitness value and the time fitness
value of (I, µ), respectively. Then the total fitness (or
simply fitness) of (I, µ) is defined as:
fitness =
f
order
+ f
time
2
4 COMPUTATION OF FITNESS
VALUES
The previous section defined the fitness of a match-
ing instance. However, there are possibly many
matching instances for a single trace. For exam-
ple, if the process model has a loop, there is a
matching instance for each number of iteration of
the loop. Let us consider the model in Figure 1.
There are automaton instances corresponding to exe-
cution ⟨a,b,c, d⟩, ⟨a, b, c,b,c, d⟩, ⟨a, b, c,b,c, b,c,d⟩,
and so on. Each automaton instance yields differ-
ent matching instance. When checking conformance
of a trace to the model, which execution should we
choose for evaluating the fitness? The answer is an
optimal matching instance. For example, if the trace
is ⟨a,b,d⟩, the execution of the model in Figure 1
most similar to it is ⟨a, b,c,d⟩. Thus, it is natural to
think that the trace intended to execute this path in the
model, but unfortunately a mistake happened. It is not
reasonable to think that the trace intended to execute
⟨a,b,c, b,c,d⟩ nor ⟨a,b,c, b,c,b, c,d⟩, because if the
trace really intended to such executions (i.e., loop it-
erations), at least b or c should occur more than once.
Therefore, we have to find the most similar execution
to the trace for evaluating the fitness, i.e. an optimal
matching instance. In other words, an optimal match-
ing instance represents the most similar execution of
the model to reality (the trace recorded in the event
log).
This section articulates the computation of the fit-
ness values between a trace and a process model. For
this, we need to define the notion of optimal match-
ing instances. Furthermore, we show how we can find
such optimal matching instances efficiently using A*
algorithm.
4.1 Optimal Matching Instance
We defined the order fitness in Definition 6. Here we
define the cost of a matching instance, and based on it
we define optimal matching instances.
Definition 9 (Cost of matching instance, optimal
matching instance). Let M = (L,l
0
,z,A, T, γ) be a
FA-model model over the activity set A. Let L
A
=
(E,C,α, β,τ,≻) be an event log over A and E
ℓ
be the
trace of a case ℓ ∈ C. Let E
′
be a prefix of E
ℓ
. Further-
more, let κ
s
: A → N
>0
and κ
i
: A → N
>0
be functions
that give the skip costs and the insert costs of activ-
ities, respectively. Then, the cost δ
n
: J
E
′
→ N of a
matching instance is defined by:
δ
n
((I
E
′
,µ)) =
∑
s
i
∈LI
s
κ
s
(γ(ρ(s
i
))) +
∑
e∈E
′i
κ
i
(α(e))
where I
E
′
= (LI, TI, ρ), LI
s
= LI − rng(µ) and E
′i
=
E
′
− dom(µ).
An optimal matching instance of E
′
for M is a
matching instance in J
E
′
that has the minimum cost.
Note that the cost of a matching instance appears
as cost in the definition of the order fitness f
order
=
1 −
cost
base
in Definition 6. Since the value base is con-
stant (i.e., does not depend on a matching instance),
optimal matching instances have the maximum value
of the order fitness.
We define the order fitness of a trace E
ℓ
to be the
order fitness of an optimal matching instance in J
E
ℓ
.
Note that there are possibly many optimal match-
ing instances for the same trace. Consider the trace
⟨a,b,c, b,d⟩ for the process model in Figure 1, and
assume that every activity has the same skip cost and
the insert cost. Then, there are two possible optimal
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
550

matching instances: one corresponding to the model
execution ⟨a, b,c,d⟩ (the second b in the trace is in-
serted) and one corresponding to the model execution
⟨a,b,c, b,c,d⟩ (the second c in the model execution is
skipped in the trace). To compute the order fitness of
a trace, we need to find at least one optimal matching
instance.
4.2 Search for an Optimal Matching
Instance
To find an optimal matching instance for a given trace
and a process model, we define the search space graph
whose vertices are matching instances. For this, we
first define the transition relation and the distance be-
tween matching instances.
For an automaton instance I = (LI,TI, ρ) and S ⊆
LI, We write I ∩ S for the automaton instance (LI ∩
S,TI ↾
S
,ρ ↾
S
), where TI ↾
S
= {(l
1
,l
2
) ∈ TI | l
1
∈ S ∧
l
2
∈ S}, and ρ ↾
S
is the restriction of ρ to S.
Definition 10 (Transition relation between matching
instances). Let M = (L, l
0
,z,A, T, γ) be a FA-model
over the activity set A. Let L
A
= (E,C, α, β,τ,≻) be
an event log over A and E
ℓ
be the trace of a case ℓ ∈C.
Let E
1
and E
2
be prefixes of E
ℓ
. Let I
1
= (LI
1
,TI
1
,ρ
1
)
and I
2
= (LI
2
,TI
2
,ρ
2
) be automaton instances of M,
and let (I
1
,µ
1
) ∈ J
E
1
and (I
2
,µ
2
) ∈ J
E
2
be matching
instances. Then, (I
1
,µ
1
) ▶ (I
2
,µ
2
) if and only if one
of the following hold:
• E
2
= E
1
· e and there is s
i
∈ LI
2
− LI
1
such that
LI
2
= LI
1
∪ {s
i
}, µ
2
(e) = s
i
, ∀e
′
∈ E
1
.µ
1
(e
′
) =
µ
2
(e
′
), and I
1
= I
2
∩ LI
1
. In other words, E
2
is
obtained from E
1
by appending the event e, and
a corresponding activity execution in the model is
also added to I
2
. This means that the trace execu-
tion and the model execution coincide.
• E
2
= E
1
and there is s
i
∈ LI
2
−LI
1
such that LI
2
=
LI
1
∪ {s
i
}, ∀e
′
∈ E
2
.µ
1
(e
′
) = µ
2
(e
′
), and I
1
= I
2
∩
LI
1
. In other words, an activity corresponding to
s
i
is added to I
2
. This means that an activity of the
model is skipped in the trace E
2
.
• E
1
= E
2
·e and ∀e
′
∈ E
1
.µ
1
(e
′
) = µ
2
(e
′
) and µ
2
(e)
is undefined. In other words, E
2
is obtained from
E
1
by appending the event e, but no corresponding
activity is added to I
2
. This means that an event is
inserted to the trace E
2
.
If (I
1
,µ
1
) ▶ (I
2
,µ
2
), then (I
2
,µ
2
) is obtained by ex-
ecuting the same activity in the trace and the model,
or only the model executes an activity (and thus the
automaton instance grows) and the trace does not
change (skip), or only the trace executes an activity
(insert) and the automaton instance does not change.
We define the distance for such transitions be-
tween matching instances (technically, it is defined
for every pair of matching instances).
Definition 11 (Distance between matching instances).
Let M = (L, l
0
,z,A, T, γ) be a FA-model over the ac-
tivity set A. Let L
A
= (E,C,α, β,τ,≻) be an event log
over A and E
ℓ
be the trace of a case ℓ ∈ C. Let E
1
and E
2
be prefixes of E
ℓ
. Let I
1
and I
2
be automaton
instances of M, and let (I
1
,µ
1
) ∈ J
E
1
and (I
2
,µ
2
) ∈
J
E
2
be matching instances. We define the distance
δ((I
1
,µ
1
),(I
2
,µ
2
)) between (I
1
,µ
1
) and (I
2
,µ
2
) as:
δ((I
1
,µ
1
),(I
2
,µ
2
)) = δ
n
((I
2
,µ
2
)) − δ
n
((I
1
,µ
1
))
+ |E
2
| − |E
1
|
Now we define the search space graph of matching
instances based on the above definitions. Here, we
write σ < σ
′
to mean that the sequence σ is a prefix
of the sequence σ
′
.
Definition 12 (Search space graph). Let M =
(L,l
0
,z,A, T, γ) be a FA-model over the activity set A.
Let L
A
= (E,C, α,β,τ, ≻) be an event log over A and
E
ℓ
be the trace of a case ℓ ∈ C. The search space graph
of matching instances of E
ℓ
for M is G = (V,W,ζ)
where
• V =
S
E
′
<E
ℓ
J
E
′
is the set of vertices,
• W = {(v
1
,v
2
) ∈ V × V | v
1
▶ v
2
} is the set of
edges, and
• ζ is a weight of edges, and defined as ζ((v
1
,v
2
)) =
δ(v
1
,v
2
) for every (v
1
,v
2
) ∈ W .
The sequence v
1
,v
2
,.. .,v
n
is called a path of G if v
i
▶
v
i+1
for all 1 ≤ i < n. For a path π = v
1
,v
2
,.. .,v
n
of
G, the length of π is defined as:
len(π) =
n
∑
i=1
δ(v
1
,v
2
).
Then, the optimal matching instance search prob-
lem is defined as:
Definition 13 (Optimal matching instance search
problem). Let G = (V,W,ζ) be the search space
graph of E
ℓ
for M = (L,l
0
,z,A, T, γ). Let v
src
=
((
/
0,
/
0,ρ
0
),µ
0
) ∈ J
⟨⟩
(here ρ
0
and µ
0
are the
empty maps) be the initial vertex. Let V
trg
=
{((LI, TI, ρ),µ) ∈ J
E
ℓ
| ρ(last((LI, TI,ρ))) = z} be the
set of target vertices, where last((LI, TI,ρ)) is the lo-
cation instance l such that succ(l) =
/
0 in (LI,TI,ρ).
Then, the optimal matching instance search problem
is a problem to find the shortest path v
src
,...,v
goal
where v
goal
∈ V
trg
.
Remark 1. Adriansyah et al.’s definition of the target
vertices (Adriansyah et al., 2011b) includes automa-
ton instances that do not end with the final location
z. In this case, if a trace partially executes the model
Conformance Checking on Timed Automaton Process Models
551

correctly, its order fitness value is 1. On the other
hand, our target vertices are only those that execute
the model till the final location. In our definition, the
order fitness value of a trace that correctly executes
the model but not to the end is less than 1. Since traces
in an event log are regarded as executions of the pro-
cess from the initial activity to the final activity, our
definition is more natural.
Theorem 1. If v
src
,...,v
goal
be the shortest path in the
search space graph of Definition 13, then v
goal
is an
optimal matching instance.
Proof. Let Π be the set of all paths from v
src
to some vertex in V
trg
in the search space graph.
Let π ∈ Π be a path ⟨(I
1
,µ
1
),...,(I
n
,µ
n
)⟩, where
(I
i
,µ
i
) ∈ J
E
i
, E
i
< E
ℓ
for all i < n and E
n
=
E
ℓ
. Since δ((I
i
,µ
i
),(I
i+1
,µ
i+1
)) = δ
n
((I
i+1
,µ
i+1
)) −
δ
n
((I
i
,µ
i
)) + |E
i+1
| − |E
i
|, the length of π is
len(π) =
n−1
∑
k=1
δ((I
k
,µ
k
),(I
k+1
,µ
k+1
))
=δ
n
((I
n
,µ
n
)) − δ
n
((I
1
,µ
1
)) + |E
n
| − |E
1
|.
Here we have δ((I
1
,µ
1
)) = 0 = |E
1
| since (I
1
,µ
1
) =
v
src
. Therefore, len(π) = δ
n
((I
n
,µ
n
)) + |E
n
| =
δ
n
(last(π)) + |E
ℓ
|. Hence,
argmin
π∈Π
len(π) =argmin
π∈Π
(δ
n
(last(π)) + |E
ℓ
|)
=argmin
π∈Π
δ
n
(last(π)),
because |E
ℓ
| is a constant. Assume that π is a match-
ing instance that gives the minimum len(π), that is,
π = ⟨(I
1
,µ
1
),...,(I
n
,µ
n
)⟩ is the shortest path. Clearly,
for all v ∈ V
trg
, there is a path from v
src
in the
search space graph. Therefore, min
π∈Π
δ
n
(last(π)) =
min
v∈V
trg
δ
n
(v). Then, from the above formula, its last
matching instance last(π) = v
goal
takes the minimum
cost δ
n
(v
goal
) among the vertices in V
trg
, which is
equal to the value of cost in the definition of the or-
der fitness (Definition 6). Therefore, v
goal
takes the
maximum order fitness, i.e., it is an optimal matching
instance.
4.3 Search Algorithm
If we are only interested in the order fitness, it is
sufficient to find one optimal matching instance, be-
cause every optimal matching instance has the same
order fitness value. In this research, however, we are
also interested in the time fitness, and the total fitness
value is the average of the order fitness value and the
time fitness value. Since each optimal instance may
have different time fitness values, each optimal in-
stance has a different total fitness value. As we men-
tioned in Section 3, when checking conformance, we
need to find the model execution most similar to the
trace (reality). Therefore, to find the best total fitness
value, we need to find all possible optimal matching
instances.
Remark 2. The matching instance that has the best
total fitness value among all matching instances might
not be optimal. In our definition, however, the order
fitness of a trace is defined as the order fitness of an
optimal matching instance. Therefore, even if there
may be a matching instance that is not optimal but
has a better total fitness value (due to the better time
fitness value), it is not regarded as the fitness value of
the trace.
In general, the set of vertices of a search space
graph is infinite. For example, if a process model has
a loop, we can iterate the loop arbitrarily many times.
That is, we can skip the activities in the loop as many
times as possible. However, since we assume that the
skip cost (given by the function κ
s
) of activities are
positive, such arbitrary number of iteration just dete-
riorate the order fitness. Thus, we can find an optimal
matching instance in finite steps by a suitable search
algorithm.
As we mentioned above, we need to find all pos-
sible optimal matching instances when we are to find
the best fitness value for a given trace and a process
model. Therefore, we need to perform the exhaustive
search. We can do this by breadth-first search (BFS)
algorithm. To use BFS in finding all possible opti-
mal matching instances, we first do usual BFS on the
search space graph and find one optimal matching in-
stance. Then, we find the minimum length of the path
to the target nodes. Using this value, we exhaustively
search all possible paths shorter than or equal to this
value (recall that the length of the path corresponds to
the cost of the matching instance of the final vertex of
the path). We call this method the exhaustive search.
Clearly, the exhaustive search is not efficient. As
the size of a process model or the length of a trace
grows, computation of the fitness value will eventu-
ally be intractable. Therefore, we utilize A* algorithm
as a more efficient algorithm, which is also used in
alignment-based conformance checking (Adriansyah
et al., 2011b). This algorithm finds an arbitrary opti-
mal matching instance and compute the fitness value
for it. Of course, it may not give the best total fitness
value, that is, it approximately computes the best total
fitness value for a given trace and a process model.
To utilize A* algorithm in searching an opti-
mal matching instance, we need to define a suitable
heuristic function. For a search space graph (V,W,ζ)
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
552

of Definition 12, we define the heuristic function h :
V → N as h(v) = |E
ℓ
| − |E
′
| for v ∈ J
E
′
. h(v) under-
estimates the distance from the vertex v to some ver-
tex in V
trg
. That is, for all v
trg
∈ V
trg
, h(v) ≤ ζ(v,v
trg
)
holds (Adriansyah et al., 2011b). With this h, we de-
fine the evaluation function f as f (v) = g(v) + h(v),
where g(v) returns the minimum cost from v
src
to v,
which is the current position in the search.
To ensure that A* algorithm finds one of the target
vertices, we need to prove the following:
1. At least one target vertex is reachable,
2. The heuristic function actually gives an underes-
timation of the distance to the target vertices, and
3. The evaluation function is monotonously increas-
ing.
These claims are true as in (Adriansyah et al., 2011b).
5 EXPERIMENTAL RESULTS
AND DISCUSSION
This section shows experimental results of the pro-
posed conformance checking algorithms for some
simple TA-models and traces. We give the compar-
ison of the exhaustive search algorithm and A* algo-
rithm with respect to the obtained matching instance,
the order and time fitness values, and the number of
the searched vertices and the computation time.
5.1 Experiment
We implemented both algorithm in Python. In our im-
plementation, a timed automaton is given in .xml for-
mat used in UPPAAL
1
(Larsen et al., 1997), a model
checker for timed automata, and a trace is given as a
text file consisting of a sequence of pairs of alphabets
(activities) and numerals (timestamps). For simplic-
ity, the skip cost and insert cost of every activity are
set to 1. We performed the experiment on the com-
puter with Core i9-13900 32GB RAM.
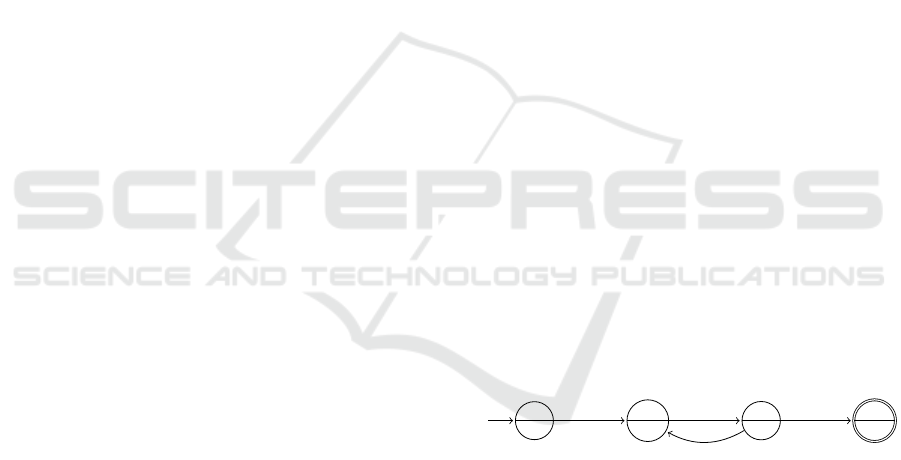
We gave three TA-models in this experiment.
The first model contains only one loop (Figure 2).
For this model, we checked the conformance against
the trace ⟨(a,10),(b, 15),(c,25), (b, 15),(d,0)⟩. The
result is presented in Table 1.
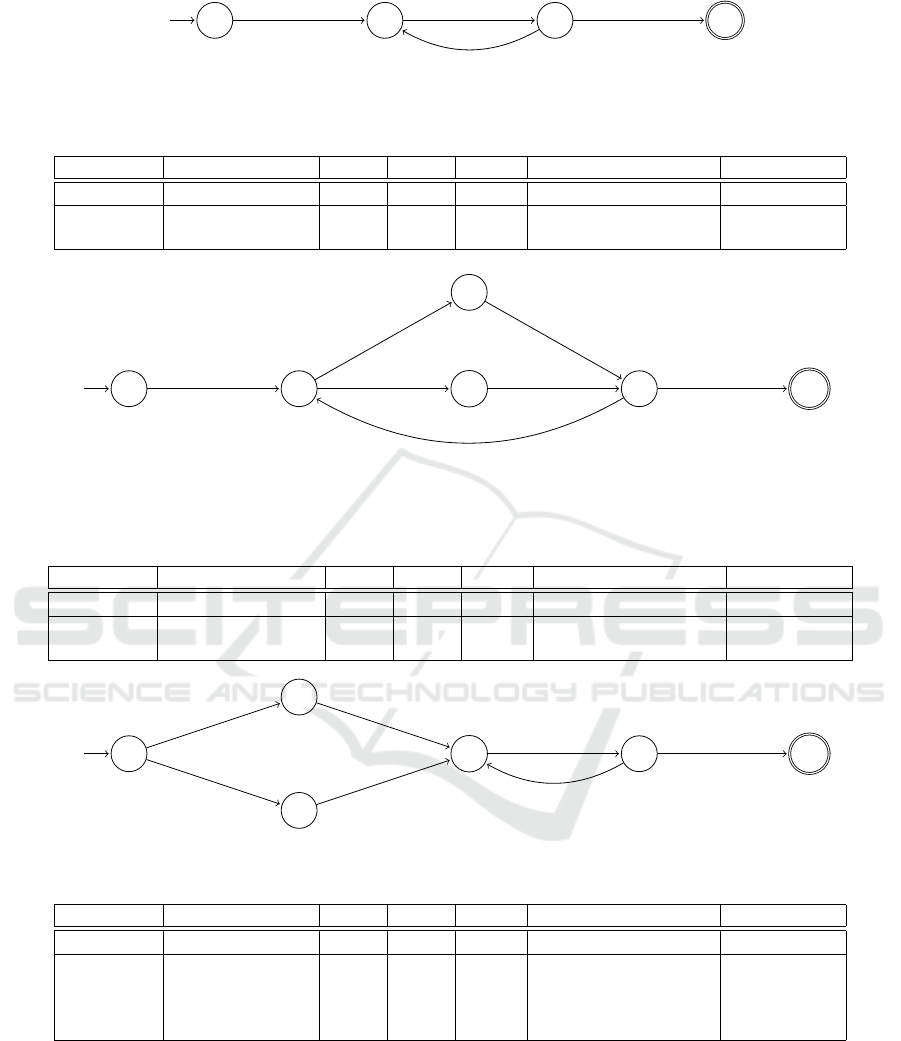
The second model has a loop that contains a
branch (Figure 3). For this model, we checked the
conformance against the trace ⟨(a,5),(b,10), (c, 5),
(e,15),(b,10),(e,15)⟩. The result is presented in Ta-
ble 2.
1
https://uppaal.org/
The third model has a branch followed by a loop
(Figure 4). For this model, we checked the con-
formance against the trace ⟨(a, 10), (d,15), (e,10),
(d, 10),( f , 0)⟩. The result is presented in Table 3.
Note that in this trace the activities inside the branch
(b and c) are skipped.
5.2 Discussion
The results of the three experiments show that the or-
der fitness is the same for each optimal instance found
by the exhaustive search algorithm, but the time fit-
ness is different for each optimal instance. In other
words, the experiments confirmed that even the op-
timal matching instances have different time fitness
values. Since A* algorithm approximately finds the
total fitness value, it fails to find the best values in the
first and third experiments, as shown in Table 1 and 3.
Therefore, we confirmed that A* algorithm does not
necessarily find the best fitness value.
We analyze the third experiment a bit deeper. For
this model and the trace, the order fitness value is
the same whether the activity b or c is interpreted as
skipped. However, when we consider the timestamp,
since the timestamp of a is 10, if the activity c is in-
terpreted as skipped, this does not give penalty by the
guard on the transition from a to c. On the other hand,
interpreting b as skipped gives penalty by the guard on
the transition from a to b. Hence, the interpretation of
c as skipped gives better fitness value. We can see
this fact from Table 3. In the optimal instances found
by the exhaustive search, the c-skipped interpretation
(the second and the forth instances) give better time
fitness values than the b-skipped interpretation (the
first and the third instances).
The result of conformance checking can be in-
terpreted in two ways: either the process model is
normative and the trace (what happened in reality) is
wrong, or the trace is valid and the process model is
incomplete. In the former interpretation, the execu-
tion path in the process model with the best fitness
value is the intended execution of the trace (reality).
The latter interpretation would suggest that the path
with the best fitness value gives a hint to improve the
process model. In either case, the optimal path, which
was difficult to identify only by the order fitness, can
be identified with our proposed conformance check-
ing method, enabling effective analysis of identifying
errors in the trace or parts in the model deviating from
reality.
As for the computation time, A* algorithm is
about 15-200 times faster than the exhaustive search
algorithm. Since real business processes are generally
much more complex than the models used in these
Conformance Checking on Timed Automaton Process Models
553
a
b
c
d
5 < t < 10 10 < t < 20
15 < t < 25
10 < t < 15
Figure 2: The first TA-model. The location names designate the activity names.
Table 1: The result of conformance checking for the model in Figure 2 and the trace ⟨(a,10),(b, 15), (c, 25), (b, 15), (d,0)⟩.
Algorithm Optimal instance f
order
f
time
fitness # of searched vertices Time
A* ⟨a,b,c,d⟩ 0.889 0.778 0.883 40 5.174 × 10
−4
Exhaustive
⟨a,b,c,d⟩ 0.889 0.778 0.833
355
8.066 × 10
−3
⟨a,b,c,b, c, d⟩ 0.889 1.000 0.944
a
b
c
d
e
f
5 < t < 10
10 < t < 15
20 < t < 30
5 < t < 10
5 < t < 10
5 < t < 10
10 < t < 20
Figure 3: The second TA-model. The location names designate the activity names.
Table 2: The result of conformance checking for the model in Figure 3 and the trace ⟨(a, 5), (b,10),(c,5),
(e,15), (b,10),(e,15)⟩.
Algorithm Optimal instance f
order
f
time
fitness # of searched vertices Time
A* ⟨a,b,c,e,b,c,e, f ⟩ 0.818 0.917 0.867 147 2.562 × 10
−3
Exhaustive
⟨a,b,c,e,b,c, e, f ⟩ 0.818 0.917 0.867
3478
5.435 × 10
−1
⟨a,b,c,e,b,d,e, f ⟩ 0.818 0.833 0.826
a
b
c
d
e
f
25 < t < 35
10 < t < 20
5 < t < 10
5 < t < 10
15 < t < 25
5 < t < 15
15 < t < 25
Figure 4: The third TA-model. The location names designate the activity names.
Table 3: The result of conformance checking for the model in Figure 4 and the trace ⟨(a,10),(d,15), (e,10), (d,10),( f ,0)⟩.
Algorithm Optimal instance f
order
f
time
fitness # of searched vertices Time
A* ⟨a,b,d, e, f ⟩ 0.800 0.689 0.744 99 1.428 ×10
−3
Exhaustive
⟨a,b,d,e, f ⟩ 0.800 0.689 0.744
988
5.105 × 10
−2
⟨a,c,d,e, f ⟩ 0.800 0.889 0.845
⟨a,b,d,e,d,e, f ⟩ 0.800 0.767 0.783
⟨a,c,d,e,d,e, f ⟩ 0.800 0.917 0.858
experiments, we need an efficient algorithm like A*
that also takes the time fitness into account to find the
best matching instance. Since the problem of finding
optimal matching instances is known to be NP-hard
(de Leoni and van der Aalst, 2013), some approxima-
tive algorithm is desired even for computing the order
fitness.
6 RELATED WORK
As we mentioned in Section 1, most conformance
checking method only consider the order of activities.
Only a few researches considering attributes or times-
tamps are known.
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
554

Leoni et al. proposed a method for conformance
checking considering attributes of events (de Leoni
et al., 2012). In their research, a process model has
assignments of constants to variables (attributes), and
when activities are executed, the value of the variables
are updated according to the assignments. The align-
ment of a trace to a model is defined as usual. The
fitness is evaluated based on the number of activities
that are not misaligned but their attribute values do not
coincide with each other. That is, their method only
uses the number of discrepancies of attribute values.
On the other hand, our proposed method evaluate the
degree of discrepancy, not just the number of discrep-
ancies.
Leoni et al.’s approach is later extended to handle
infinite data domains and customizable balance be-
tween the control-flow perspective and the data per-
spective (Mannhardt et al., 2016). Our approach first
considers the control-flow perspective, then evaluate
the data perspective. Therefore, one possible future
direction is to enable such balancing in our proposed
method.
Giacomo et al. proposed a method for aligning
timed traces to a formula of Metric Temporal Logic
(MTL
f
) (Giacomo et al., 2021). For a given timed
trace and MTL
f
formula where the trace does not sat-
isfy the formula, their method finds the trace obtained
by editing the original trace with the lowest editing
cost to satisfy the formula. Their research does not
focus on computing the fitness values. If one defines
it, it is necessarily based on the number of deletion
and insertion. Thus, the fitness essentially equal to
the order fitness. Furthermore, their method demands
NONELEMENTARY time for computation, making
it difficult to put into practice.
Grohs and Rehse (Grohs and Rehse, 2023) pro-
posed a method for correlating process conformance
with trace attributes in order to explain the potential
cause of deviations. They creates a regression tree to
find which attributes contribute to lower and higher
fitness values. The purpose of utilizing attribute val-
ues is, thus, different from our approach.
7 CONCLUSIONS
In this paper, we proposed a conformance check-
ing on timed automaton process models, which takes
time attributes of events into account. Our proposed
method first finds an optimal matching instance (i.e.,
alignment between a model and a trace). In the ob-
tained matching instance, we evaluate how much each
timestamp deviates from the interval represented by
the corresponding guard. Therefore, the fitness is
given by the order fitness, which is evaluated based
on the number of misalignments, and the time fitness,
which is evaluated based on how much the times-
tamps satisfy the guards.
We implemented our method using the exhaustive
search algorithm and A* algorithm. The exhaustive
search algorithm finds the best fitness value at the cost
of performance. A* algorithm runs faster than the ex-
haustive search but finds an arbitrary optimal match-
ing instance to compute the fitness value, thus may
not give the best fitness value.
By considering time attributes, we demonstrated
that we can uniquely determine the most similar exe-
cution of a model to a given trace, which is indistin-
guishable from other optimal executions in terms of
the order fitness. Thus, our proposed method is useful
for identifying an error in the trace or in the process
model.
There are several future directions for extending
our method. In this paper, we only consider the time
attribute. It is natural to include other numerical at-
tributes such as the amount of a resource consumed
at the event (in a manufacturing process), or the price
of a quote (in a negotiation process). By including
such attributes, we can evaluate more precise fitness
of traces and event logs.
Another direction is to extend our guard expres-
sions; we only have the form d
1
< t < d
2
. In general,
a guard is given as a conjunction of such intervals.
Therefore, we need to modify Definition 6 to handle
such formulas.
We also need to develop an efficient search algo-
rithm in computing the fitness value considering the
time fitness.
Finally, we are to carry out extensive experiments
using real-life event logs and process models. The
problem is, however, the lack of timed automaton
process models in real-life examples. One attempt
is to discover a skeleton of the model using well-
established model discovery algorithm, then manu-
ally modify and annotate necessary information to it
(Ito et al., 2021). It is strongly desired to develop
some process discovery algorithm that constructs ap-
propriate timed automaton process models from event
logs.
ACKNOWLEDGMENTS
This work was supported by JSPS KAKENHI Grant
Number JP21K11756. The authors thank Atsushi
Takayanagi for helpful comments.
Conformance Checking on Timed Automaton Process Models
555

REFERENCES
Adriansyah, A. (2014). Aligning Observed and Modeled
Behavior. PhD thesis, Technische Universiteit Eind-
hoven.
Adriansyah, A., Sidorova, N., and van Dongen, B. F.
(2011a). Cost-based fitness in conformance check-
ing. In 11th International Conference on Application
of Concurrency to System Design, ACSD 2011, New-
castle Upon Tyne, UK, June 20-24, 2011, pages 57–
66.
Adriansyah, A., van der Aalst, W. M. P., and van Don-
gen, B. F. (2011b). Conformance checking using
cost-based fitness analysis. In 15th IEEE Inter-
national Enterprise Computing Conference, EDOC
2011, Helsinki, Finland, August 29-Spetember 2,
2011, pages 55–64.
de Leoni, M. and van der Aalst, W. M. P. (2013). Aligning
event logs and process models for multi-perspective
conformance checking: An approach based on integer
linear programming. In Daniel, F., Wang, J., and We-
ber, B., editors, Business Process Management - 11th
International Conference, BPM 2013, Beijing, China,
August 26-30, 2013. Proceedings, volume 8094 of
Lecture Notes in Computer Science, pages 113–129.
Springer.
de Leoni, M., van der Aalst, W. M. P., and van Dongen,
B. F. (2012). Data- and resource-aware conformance
checking of business processes. In Abramowicz, W.,
Kriksciuniene, D., and Sakalauskas, V., editors, Busi-
ness Information Systems - 15th International Confer-
ence, BIS 2012, Vilnius, Lithuania, May 21-23, 2012.
Proceedings, volume 117 of Lecture Notes in Business
Information Processing, pages 48–59. Springer.
Giacomo, G. D., Murano, A., Patrizi, F., and Perelli, G.
(2021). Timed trace alignment with metric tempo-
ral logic over finite traces. In Bienvenu, M., Lake-
meyer, G., and Erdem, E., editors, Proceedings of
the 18th International Conference on Principles of
Knowledge Representation and Reasoning, KR 2021,
Online event, November 3-12, 2021, pages 227–236.
Grohs, M. and Rehse, J.-R. (2023). Attribute-based
conformance diagnosis: Correlating trace attributes
with process conformance. In Montali, M.,
Senderovich, A., and Weidlich, M., editors, Process
Mining Workshops, pages 203–215, Cham. Springer
Nature Switzerland.
Ito, S., Vym
ˇ
etal, D., and
ˇ
Sperka, R. (2021). Process mining
approach to formal business process modelling and
verification: a case study. Journal of Modelling in
Management, 16(2):602–622.
Ito, S., Vym
ˇ
etal, D.,
ˇ
Sperka, R., and Hala
ˇ
ska, M. (2018).
Process mining of a multi-agent business simulator.
Computational & Mathematical Organization Theory,
24(4):500–531.
Larsen, K. G., Petterson, P., and Yi, W. (1997). UPPAAL
in a nutshell. International Journal on Software Tools
for Technology Transfer, 1(1/2):134–152.
Mannhardt, F., de Leoni, M., Reijers, H. A., and van der
Aalst, W. M. P. (2016). Balanced multi-perspective
checking of process conformance. Computing,
98(4):407–437.
Polyvyanyy, A., Weidlich, M., Conforti, R., Rosa, M. L.,
and ter Hofstede, A. H. (2014). The 4c spectrum of
fundamental behavioral relations for concurrent sys-
tems. In 32th International Conference in Application
and Theory of Petri Nets and Concurrency, PETRI
NETS 2014, Tunis, Tunisia, June 23-27, 2014. Volume
8489 of Lecture Notes in Computer Science, pages
210–232. Springer.
Rozinat, A. (2010). Process Mining Conformance and Ex-
tension. PhD thesis, Technische Universiteit Eind-
hoven.
van der Aalst, W. M. (2016). Process Mining: Data Science
in Action. Springer.
van der Aalst, W. M. P., Adriansyah, A., and van Dongen,
B. F. (2012). Replaying history on process models
for conformance checking and performance analysis.
Wiley Interdisc. Rew.: Data Mining and Knowledge
Discovery, 2(2):182–192.
vanden Broucke, S. K. L. M., Munoz-Gama, J., Carmona,
J., Baesens, B., and Vantheienen, J. (2014a). Event-
based real-time decomposed conformance analysis. In
On the Move to Meaningful Internet Systems, OTM
2014, Amantea, Italy, October 27-31, 2014, pages
345–363.
vanden Broucke, S. K. L. M., Weerdt, J. D., Vantheienen,
J., and Baesens, B. (2014b). Determining process
model precision and generalization with weighted ar-
tificial negative events. IEEE Trans. Knowl. Data
Eng., 26(8):1877–1889.
Weidlich, M., Polyvyanyy, A., Desai, N., Mendling, J.,
and Weske, M. (2011a). Process compliance analysis
based on behavioural profiles. Inf. Syst., 36(7):1009–
1025.
Weidlich, M., Polyvyanyy, A., Mendling, J., and Weske,
M. (2011b). Causal behavioural profiles – Efficient
computation, applications, and evaluation. Fundam.
Inform., 113(3–4):399–435.
Zha, H., Wang, J., Wen, L., Wang, C., and Sun, J. (2010).
A workflow net similarity measure based on tran-
sition adjacency relations. Computers in Industry,
61(5):463–471.
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
556
