
Bayesian Network for Analysis and Prediction of Traffic Congestion
Using the Accident Data
Kranthi Kumar Talluri
a
and Galia Weidl
b
Connected Urban Mobility, University of Applied Science, Aschaffenburg, Germany
Keywords:
Bayesian Network, Congestion, Accident Hotspots, Labelling Techniques.
Abstract:
Traffic congestion has become a significant concern regarding social safety and economic impact. Under-
standing the relationship between congestion and accidents is vital in providing the patterns to the Traffic
Management System to mitigate the congestion as early as possible. Furthermore, traffic accidents lead to
property damage, casualties, and increased congestion levels. So, a lot of research is going on to tackle this
problem of accidents and congestion. This paper proposes a Bayesian Network (BN) to predict and analyze
the factors of the probability of traffic congestion using accident data. A novel technique of labeling the con-
gestion is being introduced, namely the formula-based and hotspot-based approaches, utilizing the accident
dataset. Different scenarios are developed to understand the patterns causing congestion, and two classifica-
tion models are used to evaluate the performance of the BN model. Model results are compared with different
machine learning models. Results show that the proposed model outperforms in terms of accuracy and preci-
sion. It shows comparative performance concerning other machine learning algorithms.
1 INTRODUCTION
Road transport has become a major necessity in our
day-to-day life. Apart from the benefits it provides
to society, it also costs us in terms of infrastructure
development, equipment costs, environmental impact,
noise and air pollution, traffic congestion delays, and
road accidents (Zhang et al., 2019). Congestion is
worsening day by day because of rapid urbanization
and increasing population. Factors such as high popu-
lation density, inadequate infrastructure, technical ad-
vancements and growth in motor vehicles, delivery
services, accidents, and poorly coordinated traffic sig-
nals are some causes of the increase in traffic conges-
tion. The environment, health, and economy world-
wide are affected in various forms due to congestion
(Ji et al., 2022).
According to data provided by the UK Depart-
ment for Transport (DfT), the traffic has increased ex-
ponentially. Stats show that in terms of vehicle kilo-
meters, traffic was about 50 billion in 1950, dramati-
cally rising to 400 billion, 450 billion, and more than
500 billion in 1990, 2000, and 2008, respectively. As
per DfT’s estimation, the annual cost caused by traf-
a
https://orcid.org/0000-0002-4901-7837
b
https://orcid.org/0000-0001-9041-0414
fic congestion in the UK was between 15 to 20 billion
pounds (Wang, 2010). In comparison, road accidents
have also caused significant losses in the aspect of
causalities as well as money. The information given
by DfTs showed that by the end of Q1 in 2009 alone,
more than 2.2 million road casualties were informed,
out of which death cases were 2400+ and extreme in-
jury cases were 25,000. In terms of cost, in 2007,
over 19 billion pounds were lost because of these road
accidents. From the above values, it is understood
that congestion and accidents are significant contribu-
tors impacting the country’s economy and road safety
(Wang, 2010).
Based on events or parameters that lead to traf-
fic congestion, it can be classified into two types:
recurring and non-recurring congestion (Afrin and
Yodo, 2021). Recurring congestion is regular and pre-
dictable. It has a consistent pattern and occurs repeat-
edly at specific times of day, for instance, during rush
hours because of inadequate road capacity and high
traffic demand. Some solutions to mitigate recurring
congestion include road expansion, traffic light tim-
ing optimization, and promotion of public transporta-
tion. In contrast, non-recurring congestion is tempo-
rary and unpredictable due to unforeseen events like
construction work, accidents, weather-related events,
and special events. The irregularity of events makes
Talluri, K. and Weidl, G.
Bayesian Network for Analysis and Prediction of Traffic Congestion Using the Accident Data.
DOI: 10.5220/0012551200003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 19-30
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
19
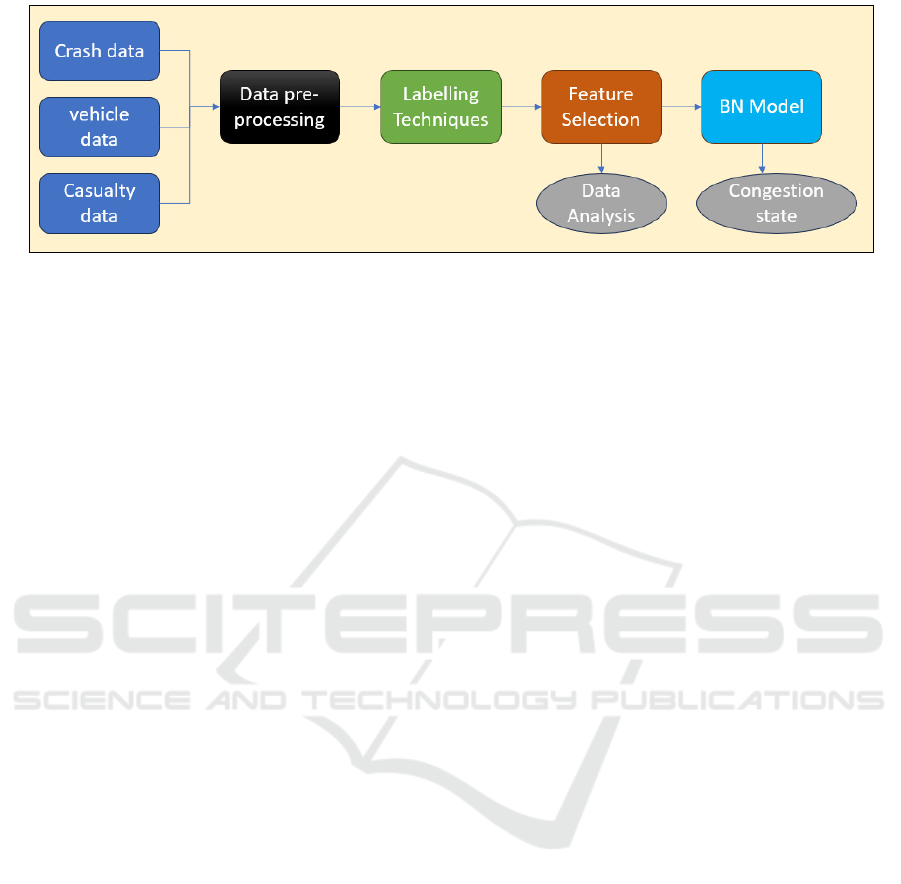
Figure 1: Block diagram of complete workflow of Traffic congestion Analysis and Prediction.
non-recurring type congestion challenging to manage
and mitigate. It involves dynamic management and
immediate response to specific incidents to control
non-recurring congestion (Afrin and Yodo, 2021).
In the past, few attempts were made by researchers
to define the relation between congestion and road ac-
cidents (Zhang et al., 2019). Accidents occurring on
different road types significantly impact congestion,
where the roadways are typically classified into ur-
ban, rural, and highways. Significant congestion can
be caused due to the delay in response time by the
police or ambulance. In (Dias et al., 2009), vehicles’
speed is reduced during congestion, further reducing
the probability of accident occurrence. It’s important
to note that vehicles moving at high density during
congestion might lead to rear-end and side collisions.
This paper proposes a probabilistic Bayesian net-
work modeling for analyzing and predicting traffic
congestion. The major objectives of this paper are:
• Building a Bayesian model for classifying the
congestion and identifying the root cause.
• Introducing novel congestion labeling criteria,
namely formula-based and hot spot-based ap-
proaches.
• Analysing the repetitive accident pattern causing
traffic congestion.
• Evaluating and comparing the performance of the
proposed model with various machine learning al-
gorithms.
The remaining paper is organized as follows: Sec-
tion 2 explains the previous works on traffic conges-
tion prediction. Sections 3 and 4 illustrate the label-
ing techniques and data pre-processing. The formal
introduction to Bayesian network and BN modeling
is described in Section 5. Furthermore, sections 6 and
7 consist of the analysis, results, and discussions, fol-
lowed by a conclusion in the final section.
2 RELATED WORK
Over the past decade, researchers have tackled vari-
ous traffic congestion problems, including traffic con-
gestion prediction, traffic demand analysis, better re-
routing to avoid congestion, accident prediction, ac-
cident duration estimation, etc. Some of the previous
works are detailed in this section.
In this paper (Gupta et al., 2022), the authors an-
alyzed the accident hotspots to understand the occur-
rence of severity at the danger zone using the Ker-
nal density estimator (KDE). Later, machine learn-
ing algorithms were used to determine the influencing
factors causing the accident’s severity. The best per-
formance was achieved using a sampling technique
named SMOTE and Random Forest. The authors
in (Zeng et al., 2016) developed a congestion factor
to identify the abnormal hotspots in a region. The
correlation between traffic data and congestion fac-
tors was analyzed with the help of GPS data obtained
from taxis in China. This analysis helped to re-route
and manage traffic when abnormal hotspots occurred.
In (Afrin and Yodo, 2021), the authors proposed a
Bayesian network to analyze the impact of variables
on congestion. The author implemented two BN mod-
els for recurring and non-recurring congestion in this
paper. Information like accidents and special events
was used to model the Bayesian network in a non-
recurring way. Furthermore, qualitative and quanti-
tative analysis was performed using both models to
provide a vision of the speed and number of vehicles
leading to congestion levels.
In (Ji et al., 2022), the authors proposed a free
model consisting of a digital and physical road net-
work. The digital twin network was the simulated
version of the physical road network. The digital twin
network was used to observe the traffic and vehicle in-
formation, whereas Conv-LSTM was used to extract
spatio-temporal features from the physical network.
Both data sets were combined and processed to pre-
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
20

dict congestion during an accident. Incident clearance
time has a direct impact on congestion. The authors
in (Ma et al., 2017) proposed a novel approach, Gra-
dient boosting decision tree(GBDTs), to predict the
duration of clearance time. It identifies the complex
relationship between variables to shorten the clear-
ance time of the accidents. The authors in (Zhang
et al., 2019) used nine features, such as traffic, acci-
dents, and environment features, to build two multi-
ple linear models—one to predict the clearance time
and the other for accident duration. The analysis il-
lustrated that accident duration was mainly impacted
by traffic, road, and type of accident, whereas clear-
ance time depends on response duration and type of
accident. Results indicated that multiple linear regres-
sion models had outperformed the ANN model. In
(Santos et al., 2021), the authors proposed a predic-
tive model for predicting the occurrence of accidents
in the future based on historical data. Various super-
vised and unsupervised models were used to predict
the accident hotspots. A random forest model was
suggested to predict future accident hotspots better.
In (Chang et al., 2022), the authors explored con-
gestion and accident-prone regions by incorporating
a framework to extract relevant information from the
microblogs posted on social media platforms using
the NLP process and deep learning methods. Then,
a modified KDE technique was applied to identify the
prone regions, and data analysis was performed to pri-
oritize mitigating congestion and accidents.
Even though previous works used Bayesian net-
works in congestion analysis, mainly recurring and
non-recurring congestion, the use of accident infor-
mation is limited. In existing approaches, accidents
are considered one of many variables in modeling
non-recurring congestion. Using the broad spectrum
of variables related to accidents helps capture the
complexity of traffic congestion accurately. Address-
ing the limitations, the uniqueness of our approach is
that we use many accident-related variables in defin-
ing congestion. It also gives an in-depth insight into
the multifaceted nature of accidents and their impact
on road traffic flow. Our research introduces an inno-
vative labeling approach utilizing the extensive acci-
dent data in modeling Bayesian networks to forecast
the congestion level and identify variables that cause
congestion.
3 LABELLING TECHNIQUES
FOR CONGESTION
In this section, two labeling approaches are the for-
mula and hotspot approaches used for labeling the
congestion state. Both approaches are further cate-
gorized into 3-class and 2-class based on congestion
state.
3.1 Formula Based Approach
This approach creates a formula using the variables
available in the dataset. It is essential to consider
speed limit, severity, and number of cars involved in
an accident while determining traffic congestion prob-
ability. The reason for considering these three vari-
ables more than others is as follows:
1. Number of Cars Involved. It provides informa-
tion about the number of vehicles involved in an
accident, which helps estimate the seriousness of
the incident. Accidents involving many vehicles
could be more severe, leading to delays, high con-
gestion, and a long time to clear the accident spot.
2. Severity. It helps assess the seriousness of the in-
cident and how much loss or damage it could have
caused based on fatalities, level of injuries, and
vehicle damages. There could be road blockage,
diversions, and high congestion when the severity
of an accident is high, as it might need fast medi-
cal emergency, investigation, and clearance.
3. Speed Limit. This variable shows the maximum
speed allowed on a particular road where an acci-
dent occurred. The consequence could be worse if
the accident happened on a road with a high-speed
limit, like highways, as it could cause delays for
authorities to reach the spot and clear it, leading
to increased congestion.
Using a heuristic approach, the congestion prob-
ability (CP) is formulated using the above three vari-
ables as shown in the equation 1.
The motivation for defining equation 1 is based on
the widely accepted metric called Speed Performance
Index (SPI), a well-recognized concept used in traffic
flow assessment. SPI is described as the ratio of actual
vehicle speed and permissible maximum speed (road
speed limit), which can be utilized in classifying the
traffic state as discussed in (Afrin and Yodo, 2021). In
our work, the speed limit variable is used similarly to
how it was used in calculating SPI, with slight modi-
fications. Equation 1 emphasizes the physical process
of disruption in traffic flow due to accidents. Incor-
porating features like severity, number of vehicles in-
volved in accidents, and speed limit helps to capture
the multifaced nature of traffic congestion efficiently.
Below is the explanation of the equation in detail.
CP = 5 + 95 ·tanh
2(N + S
2
)
√
V + 1
·log
10
(N + 1)
(1)
Bayesian Network for Analysis and Prediction of Traffic Congestion Using the Accident Data
21
Where N is the number of cars involved, S is the
severity of the accident, and V is the maximum speed
limit allowed on the road.
The S and N are combined, where S is squared
to give more weightage while calculating CP because
the severity level significantly impacts congestion and
the spot’s clearance time. In the denominator, as the
value range of the speed limit V, which in its order
of magnitude is far higher than S and N, is applied
to compensate for it, the square root is used over V.
Then, the log ensures that the complexity factor in-
creases in a logarithmic way with the number of vehi-
cles involved in the collision. To bring the congestion
probability in the required range of [-1, 1], the tan-
gent function tanh(x) is used in the equation. The final
output is shifted and scaled to ensure the probability
0 <= p <= 1.
3.1.1 3-Class Model
After obtaining the congestion probability from the
above-derived equation 1, we define the congestion
variable (target label) and categorize it into three
states representing the three classes of interest: low,
medium, and high. The labeling for congestion clas-
sification is performed based on specific criteria, in-
cluding type of road (rural, urban, and highway), level
of accident severity, and number of cars involved in
the accidents. Below is the criteria flow chart and its
conditions:
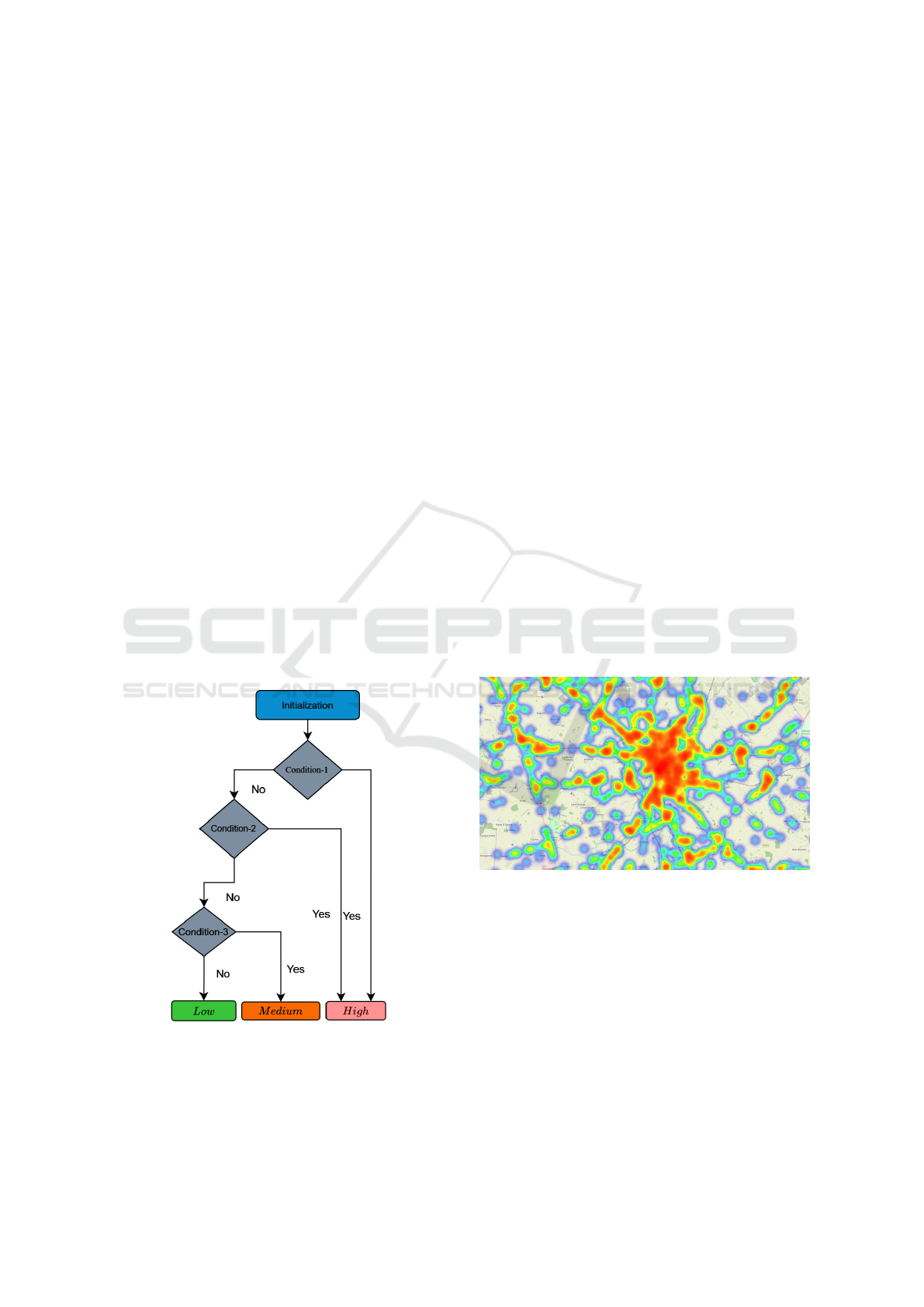
Figure 2: Flow chart for 3-class classification using
formula-based approach.
In the below conditions, Road
Cat
, Low
TH
, High
TH
indicates road category, lower, and higher threshold
respectively.
• Initialization: Low
TH
= 50, High
TH
= 80
• Condition-1: N >= 3 OR CP = High
TH
• Condition-2: Road
Cat
= (Urban OR Rural) AND
S = (Fatal OR Serious)
• Condition-3: CP > Low
Th
AND Road
Cat
=
Urban AND S = Slight
3.1.2 2-Class Model
Similarly, this section defines the congestion variable
and categorizes it into low and high classes. The same
approach as above is being used. This 2-class classifi-
cation is performed to observe the effect of the classi-
fication state on the performance of the proposed BN
model.
3.2 Hotspot Based Approach
This approach generates the hotspots based on the
number of accidents in a particular area. The accident
coordinates are provided in the dataset to identify the
location of the accident. Using those values, we can
plot on the map and see where hotspots are found, as
shown in Figure 3. Identical to the formula-based ap-
proach, the hotspots are categorized into 3-class and
2-class. Their entire process of classification is illus-
trated in the below subsections.
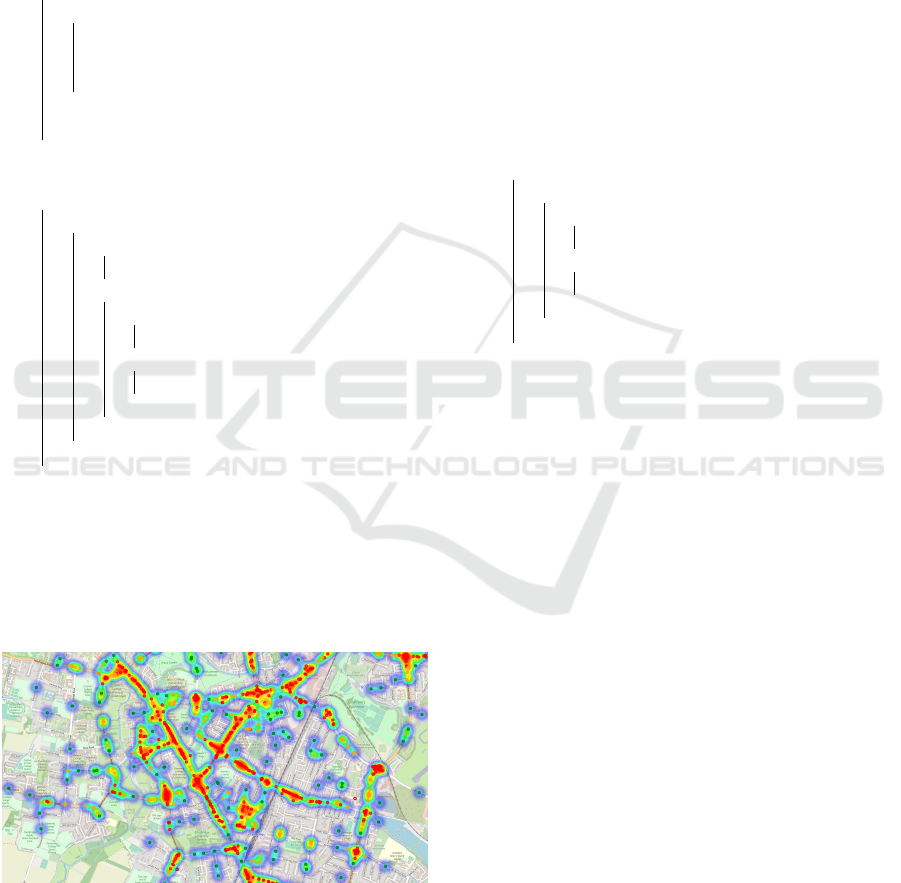
Figure 3: Plotting all accident locations of Cambridgeshire.
3.2.1 3-Class Model
In this section, a heat map is created for the region of
Cambridgeshire to visualize geographical data, i.e.,
latitude (lat) and longitude (lon) points, and calcu-
late the number of accidents that occurred within the
given radius of each data point using geospatial anal-
ysis. The estimated number of accidents is then used
to find the congestion state (congestion level), namely
low, medium, or high, as shown in Figure 4. This
algorithm consists of two functions: the NearbyAc-
cident function gives the number of accidents within
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
22
the radius = 100 meters stored in the NearbyCount
variable, and the CongestionLevel function classifies
the labels into three states. The complete process is
clearly shown in the Algorithm 1.
Data: Road accident data with lat, lon
Result: Congestion levels: low, medium, or
high
Function NearbyAccident(dataframe,
Radius):
for rows in dataframe do
Get lat, lon of accident;
Calculate distance to all points in
dataframe using Haversine formula;
end
return NearbyCount;
return
Function
CongestionLevel(NearbyCount):
for rows in NearbyCount do
if NearbyCount < 3 then
return low;
else
if NearbyCount < 6 then
return medium;
else
return high;
end
end
end
return
Initialization: Radius;
CALL NearbyAccident(dataframe,
Radius) ;
CALL CongestionLevel(NearbyCount) ;
Algorithm 1: Algorithm for 3 class congestion.
Figure 4: Mapping of color based on hotspot for congestion
level.
3.2.2 2-Class Model
The heat map creation is similar to the 3-Class model
except that classification is only done in two states:
low and high. The congestion level is calculated using
Algorithm 2, shown below. Congestion is considered
low if the accident count with a given radius is less
than four, or else it’s considered high. A balanced
dataset requires a threshold of number of accidents
< 4 because an increase in the count would cause bi-
asing towards one of the congestion categories while
affecting the model performance.
Data: NearbyCount - a count of nearby
elements
Result: Congestion level: low or high
Function
CongestionLevel(NearbyCount):
for rows in NearbyCount do
if NearbyCount < 4 then
return low;
else
return high;
end
end
return
Algorithm 2: Algorithm for 2 class congestion.
4 DATA PRE-PROCESSING
4.1 Dataset
The dataset contains information about traffic col-
lisions in Cambridgeshire (Cambridgeshire County
Council, 2018). This data is collected from 1st Jan
2017 to 31st July 2023, with specific criteria data in-
cluded. To include the data, it should be officially
reported to the police with at least one person being
injured. Furthermore, at least one vehicle should have
been involved in the crash.
The dataset is split into three parts: Crashes, Ve-
hicles, and Casualties. The crash data contains all the
information about the traffic, weather, and other vari-
ables related to the collision. The features involving
information about the vehicle, such as vehicle type,
vehicle maneuver, vehicle first point of impact, etc.,
are placed in the Vehicle data sheet. The casualty
data is related to the injured person: casualty age, sex,
severity, etc.
’Collision Reference No.’ is the unique column
in all three data sheets, which helps correlate the data
across the data sheets. Furthermore, this correlated
Bayesian Network for Analysis and Prediction of Traffic Congestion Using the Accident Data
23
data gives a detailed overview of each accident, which
helps analyze the data from the perspective of conges-
tion patterns.
4.2 Variables Discretization
The dataset consists of many variables, but from each
dataset, only certain variables are considered based on
the assumption that these variables could contribute
more to the congestion analysis. Therefore, we se-
lected from the datasets the following variables: char-
acteristic for crash - in Table 1; for casualty - in Ta-
ble 2; for vehicle - in Table 3. Furthermore, all the
used variables consist of discrete states. One major
problem during data pre-processing is inappropriate
distribution across the various variable states. Hence,
two steps are carried out. In step 1, we limit the vari-
able states; possible states are combined into a sin-
gle state, providing a meaningful state name. In an-
other step, a new state, ”Others” is created for some
variables to combine the number of categories con-
taining a limited amount of data in each state. For
instance, the weather variable consists of seven dis-
crete states: ”Fine with high winds, Fine without
high winds, Raining with high winds, Raining with-
out high winds, Snowing with high winds, Snowing
without high winds, Fog or mist - if hazard”.
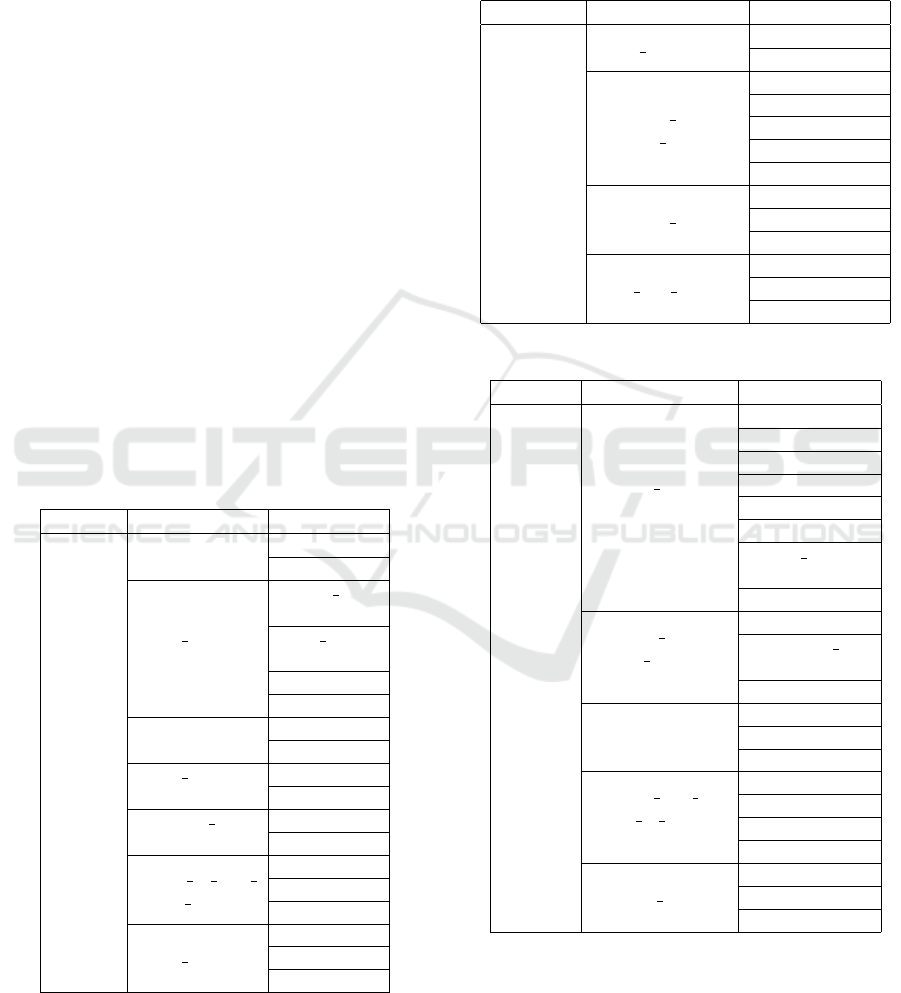
Table 1: Variables of the Crash dataset and their states.
Type Variable name States
Crashes
Day
Weekday
Weekend
Road Type
Single
carriageway
Dual
carriageway
Roundabout
Others
Weather
Good
Bad
Road
Conditions
Wet
Dry
Lighting
Conditions
Dark
Daylight
Types of turn
being made
Right turn
Left turn
No turn
Time period
PM Peak
AM Peak
OFF Peak
As the data across each state is deficient, it is con-
verted into two states: good (Fine with high winds,
Fine without high winds) and bad ( Raining with high
winds, Raining without high winds, Snowing with
high winds, Snowing without high winds, Fog or mist
- if hazard). So accordingly, all the variables are pre-
processed, and the variables, along with their states,
are given in Tables 1, 2, and 3.
Table 2: Variables of Casualty dataset and their states.
Type Variable name States
Casualties
Num Casualties
low
high
Casualty
Vehicle group
Pedal Cycle
Car
Motorcycle
Pedestrian
Others
Casualty severity
Slight
Serious
Fatal
Seat belt used
Worn
Not applicable
Others
Table 3: Variables of Vehicles dataset and their states.
Type Variable name States
Vehicles
Vehicle
Manoeuvre
Slowing
L-Bend Ahead
Moving off
Turning right
R-Bend Ahead
Turning left
Going
ahead other
Others
Alcohol
breath test
Negative
Driver not
contacted
Others
Skidding
No skidding
Skidded
Flipped
Vehicle first
point of
impact
Nearside
Offside
Front
Others
Journey purpose
Work trip
Not Known
Others
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
24

5 IMPLEMENTING A BAYESIAN
NETWORK FOR TRAFFIC
CONGESTION
5.1 Bayesian Network
The Bayesian network is a probabilistic graphical
model that uses a direct acyclic graph(DAG) approach
to represent the conditional dependencies between the
variables. This model is robust in tackling uncertain-
ties and can capture complex hidden relationships be-
tween sets of variables. It is used in various domains
like road traffic management, health care, etc. These
Bayesian networks are also called Bayes networks or
Belief networks (Nagarajan et al., 2013).
5.1.1 Fundamental Features of BN
• Nodes and Edges. In a Bayesian network, nodes
represent variables or features. There are various
types of nodes, such as discrete, continuous, etc.,
whereas Edges or arrows define the strength of the
conditional relationship between those variables.
• Conditional Independence. One of the most crit-
ical characteristics of the Bayesian network is that
it can represent the conditional independence be-
tween the variables. For instance, if two nodes
are conditionally independent, knowing the state
information of one node doesn’t provide any in-
formation on the state of the other node, given
the parent node state is known. This character-
istic helps to simplify the model when there is a
complex relationship.
• Joint Probability Distribution. A Bayesian net-
work can compactly represent a set of variables’
probability distribution. Let’s say X1, X2, . . . Xn
are the network variables; joint probability dis-
tribution can be defined as the product of each
node’s conditional probability provided by its par-
ent node (Kjaerulff and Madsen, 2008).
P(X
1
, X
2
, . . . , X
n
) =
n
∏
i=1
P(X
i
| Parents(X
i
)) (2)
5.1.2 Formulas and Calculation
• Bayes’ Theorem. The fundamental principle of
Bayesian networks helps update the probability of
the hypothesis when more information is provided
as evidence (Kjaerulff and Madsen, 2008). The
mathematical representation of Bayes’therorem
is:
P(A | B) =
P(B | A) ×P(A)
P(B)
(3)
Where: P(A|B) is the probability of the occur-
rence of event A, given that some evidence on B.
It is called posterior probability. P(B|A) is the
probability of the occurrence of event B, given
that A is true. P(A), P(B) are the probability of
occurrence of event A and B. These are also called
prior probabilities.
• Inference in BN. This is the process of calcu-
lating the posterior probability of an event when
given evidence on other variables. The Inference
in the Bayesian Network is also utilized in diag-
nosis or predictions based on uncertain or incom-
plete information.
• Learning in BN. The Bayesian networks can
compute the conditional probabilities table (CPT)
from the data using methods like EM estimator
or maximum likelihood estimator (Yang et al.,
2019).
5.2 BN Structure
The proposed structure of the Bayesian Network con-
sists of 17 variables, which are taken from three dif-
ferent data sheets as described in section 5.2. The de-
sign of the BN is performed with the help of Random
Forest to gather the importance of the features and the
structure learned from the data by using the HUGIN.
The model is built based on these approaches. The
model shown in Figure 5 is used for classification.
The formula and hotspot-based approach are used
only for data labeling. Another model is used where
the BN model’s structure and parameters are learned
from the data. This model is used as a base model,
which will be helpful when comparing the perfor-
mance of the proposed model.
5.3 Evaluation Metrics
The confusion matrix is used to evaluate the model
performance in classification tasks. It gives infor-
mation about the actual and model-predicted classes.
True Positive, True Negative, False Positive, and
False Negative are the four essential elements in the
confusion matrix that can be used to calculate met-
rics like Accuracy, Precision, Recall, and F1-score to
assess the model’s performance.
6 DATA ANALYSIS
This section is divided into data visualization for an-
alyzing the correlation patterns between the features
Bayesian Network for Analysis and Prediction of Traffic Congestion Using the Accident Data
25
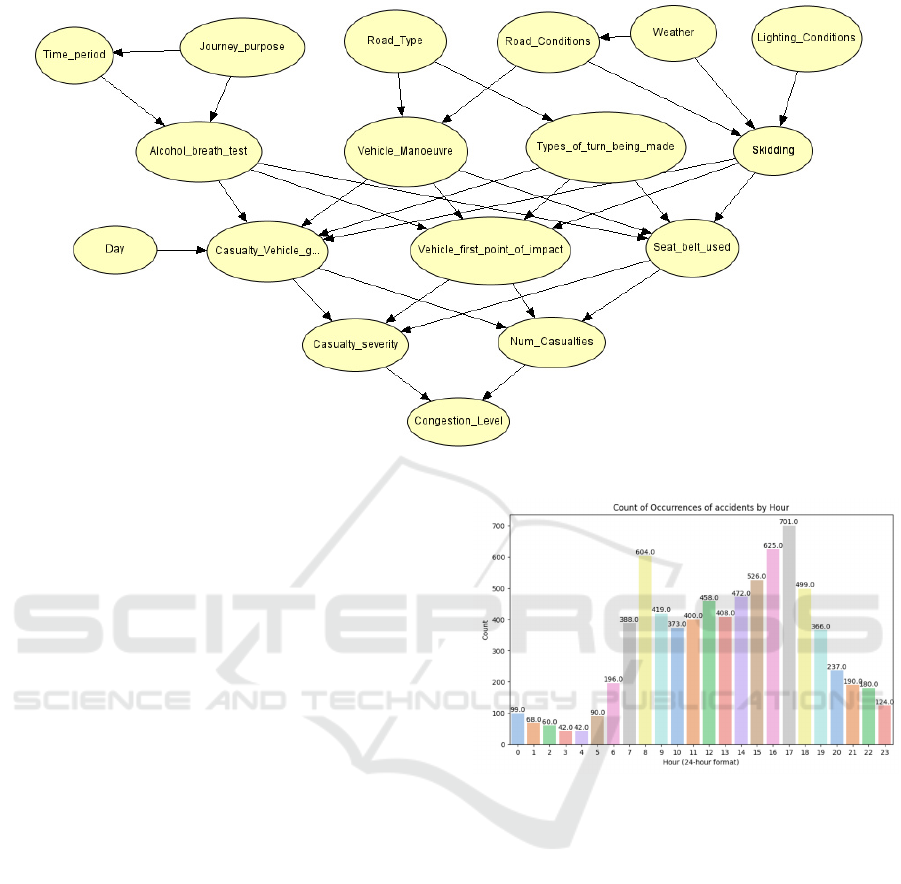
Figure 5: Diagram of Proposed Bayesian Network.
and scenarios for diagnosis and predictive analysis of
the Bayesian Network.
6.1 Data Visualization
The bar plot shown in Figure 6 shows the occurrence
of road accidents by hour in Cambridgeshire. There
is a significant rise in accidents in the late afternoon,
around 16:00 to 18:00, and most accidents, i.e., 701
cases, occurred at 17:00, which can be observed from
Figure 6. Another prominent rise can be observed
during morning rush hour at 8:00 when people usu-
ally go to the office or school. The data shows that
most accidents occurred more frequently during rush
hour. These accident patterns are correlated to peak
hours of traffic congestion patterns. So, a traffic man-
agement system should address traffic congestion to
reduce accidents.
The relationship between congestion probability
and accident severity is illustrated using the violin
plot in Figure 7. The severity is categorized into
slight, severe, and fatal, and data is plotted based on
these severity types. This wider violin shape in the
plot indicates that congestion probability is high for
that severity type.
From Figure 7, it is evident that the relationship
between the severity causes the congestion. With the
increase in severity, the probability of congestion also
increases. The data distribution also states that slight
severity has a lesser impact on congestion when com-
pared with Serious and fatal accidents. Moreover, all
the Figures 7, 8, 9 use equation 1 for the computation
of the congestion probability on the y-axis.
Figure 6: Number of road accidents happened on an Hourly
basis.
The plot in Figure 8 illustrates the number of ve-
hicles involved, leading to congestion probability on
different road types. From Figure 8, it is clear that,
with the number of vehicles, the congestion proba-
bility rises across all the road types, which indicates
that more vehicles are likely to cause more conges-
tion. The data distribution shows that, for urban roads,
there is a steep rise in congestion with fewer vehicles
involved. In contrast, there is a moderate rise in con-
gestion probability on rural roads and highways. So,
the distribution implies that urban roads are more sen-
sitive to vehicle accidents.
Figure 9 describes the congestion probability
based on accident severity across different road types.
The trend shows that, despite road type, the likelihood
of congestion increases with the increase in severity.
For instance, fatal accidents for all road types cause
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
26
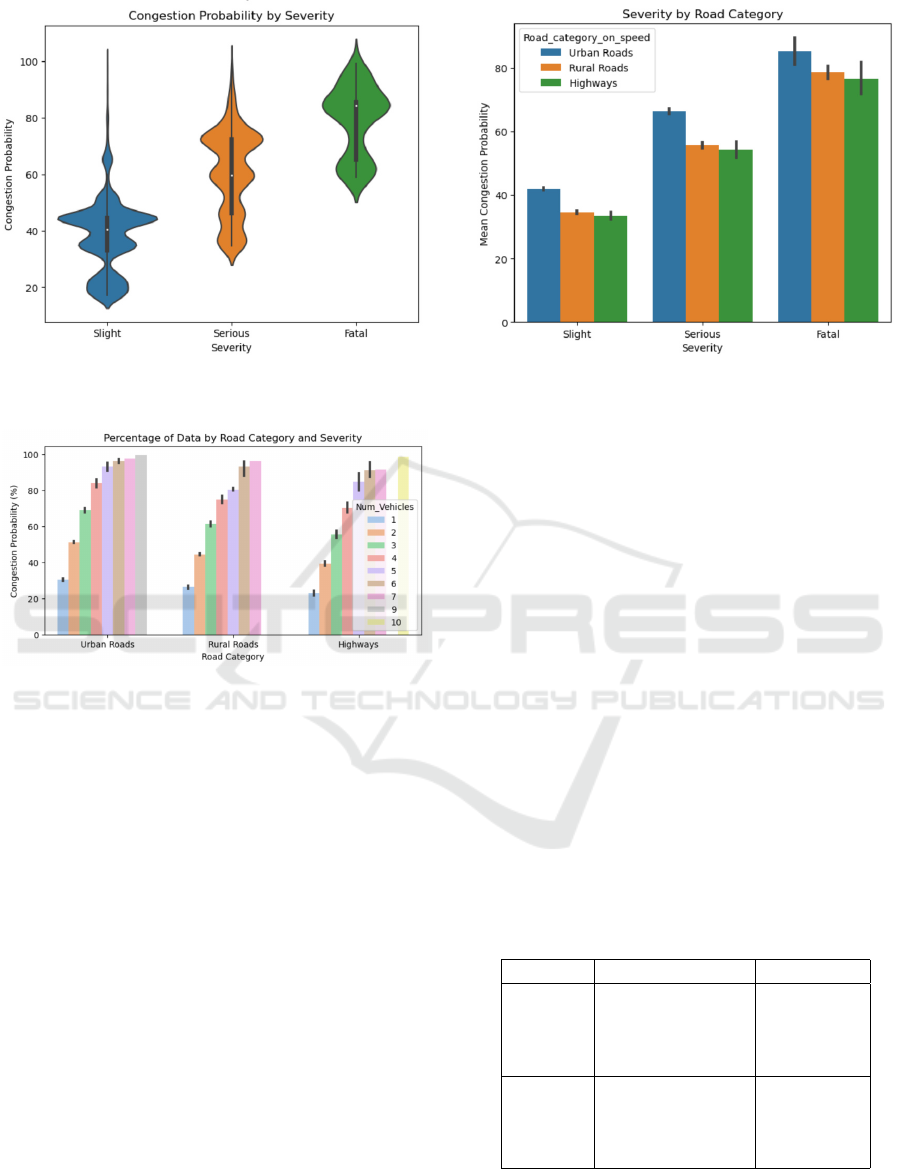
Figure 7: A plot of level of severity impacting the conges-
tion probability.
Figure 8: Plot for the effect of number of vehicles involved
in an accident over congestion probability.
a higher impact on congestion. And from the data,
urban roads exhibit more congestion when compared
to rural roads and highways for all levels of sever-
ity. This is because the volume of traffic on urban
roads and complex traffic dynamics are higher. So, to
address traffic congestion, the strategies should also
consider severity and road type.
6.2 Scenarios Evaluation
From the accident dataset, the probability distribution
for each variable obtained defines the default proba-
bilities of the BN model. People tend to go to the
office and school in the AM peak mornings and re-
turn PM peak in the evenings, mainly on weekdays.
The accident dataset shows a 77.57% likelihood for
accidents during the weekdays, whereas 22.43% on
weekends. Following a similar trend, the probability
of time period is 38.47%, 42.09%, and 19.44% for
AM, PM, and OFF peaks, respectively. The probabil-
ity of good weather is 84.15%, and 71.63% of road
conditions are dry. So, it is less likely that the vehicle
will skid. Hence, as per the dataset, the chances of no
Figure 9: Bar plot to indicate the data distribution based on
road category and severity.
skidding are higher at 79.73%, while vehicle skidding
and flipping are very low.
As most of them are car users, with a likelihood of
47.15%, and wearing the seat belt, there is a chance
of slight severity to the person, with a probability of
72.88%, which leads to further reducing the number
of casualties to 72.87%. Combining the states of num-
ber of casualties and casualty severity, the probabil-
ity of congestion level being low is 28.98%, medium
is 35.44%, and high is 35.58%. The likelihood of
medium and high are almost the same from the data.
Apart from default probabilities as detailed above,
six different scenarios are created to observe the im-
portance of variables and probability distribution of
variables that cause congestion. All these scenarios
are classified correctly with the proposed BN model,
as shown in Figure 10. A 2-class congestion state ex-
plains scenarios 1 and 2, whereas the remaining four
scenarios are demonstrated using a 3-class congestion
state.
Table 4: Probability distribution of congestion state based
on scenario 1 and 2.
Scenario Variable (state) Congestion
1
Alcohol test
(negative) &
Casualty severtiy
(low)
Low
(77.78%)
2
Alcohol test
(positive) &
Casualty severtiy
(serious)
High
(74.24%)
Scenario-1, 2 were created for varying the Alco-
hol breath test and casualty severity for 2-class con-
gestion state as shown in Table 4. In scenario 1, the
Bayesian Network for Analysis and Prediction of Traffic Congestion Using the Accident Data
27
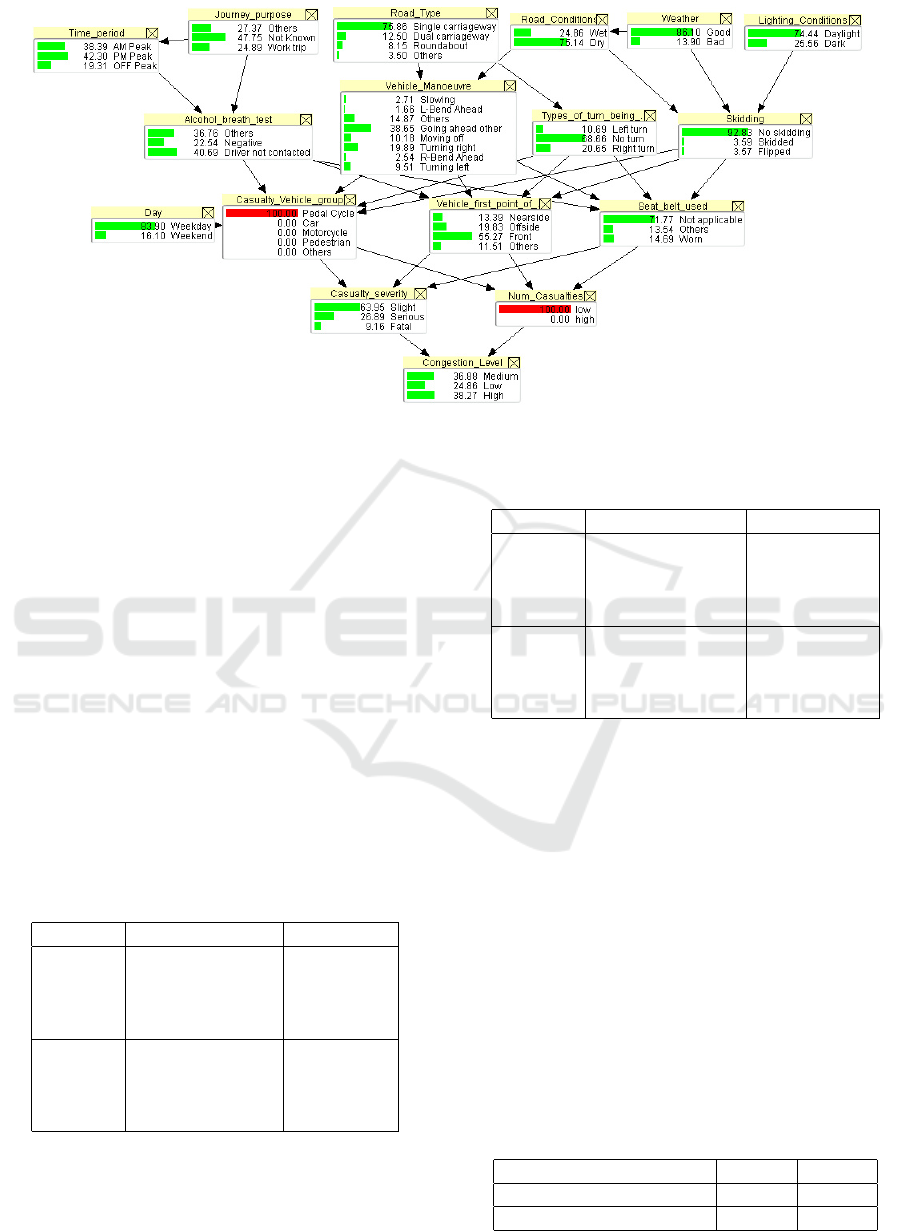
Figure 10: Diagram of Bayesian Network with evidence for Scenario-3, 4.
alcohol test is negative, and casualty severity is slight.
A low level of congestion is being observed with a
probability of 77.78%. Scenario 2 consists of the al-
cohol test state as positive (it is a part of the Others
category), and severity as serious, and the 74.24%
congestion level is higher. Here, the seriousness of
the accidents influences the impact on congestion.
Scenario-3, 4. These are created to vary the casu-
alty vehicle group and number of casualties to show
the impact of the vehicle group are shown in Table 5.
In scenario 3, one of the casualty vehicle group states
is pedestrian and has a low number of casualties; then,
the likelihood of congestion is medium, with 39.42%.
In scenario 4, the Pedal cycle is the state of vehicle
group type with a low number of casualties, and then
there is a 38.27% chance of congestion being high as
shown in Figure 10.
Table 5: Probability distribution of congestion state based
on scenario 3 and 4.
Scenario Variable (state) Congestion
3
Casualty veh grp
(pedestrian) &
Num of casualty
(low)
Medium
(39.42%)
4
Casualty veh grp
(Pedal cycle) &
Num of casualty
(low)
High
(38.27%)
Scenario-5, 6: are created to vary the casualty
severity and the number of casualties as shown in Ta-
ble 6. In scenario 5, with slight casualty severity and
low casualties, the congestion probability is medium,
with a probability of 55.75%. In scenario 6, when the
Table 6: Probability distribution of congestion state based
on scenario 5 and 6.
Scenario Variable (state) Congestion
5
Casualty severity
(slight) &
Num of casualty
(low)
Medium
(55.75%)
6
Casualty severity
(serious, fatal) &
Num of casualty
(high)
High
(91.7, 99.1%)
number of casualties is high with the severity of casu-
alty as serious and fatal, then congestion probability
is high at 91.17% and 99.1%, respectively.
7 RESULTS AND DISCUSSION
Table 7 illustrates the accuracy of two labeling ap-
proaches for different classes. From the table, it is
clear that formula-based approaches have better per-
formance when compared with the hotspots-based ap-
proach, which gives model accuracy of 45% and 52%
for 3-class, 2 class respectively. One of the main rea-
sons for the lower performance is the variables used
for labeling.
Table 7: Performance of proposed model using both ap-
proaches.
3-class 2-class
Formula Based approach 0.66 0.89
Hotspot Based approach 0.45 0.52
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
28
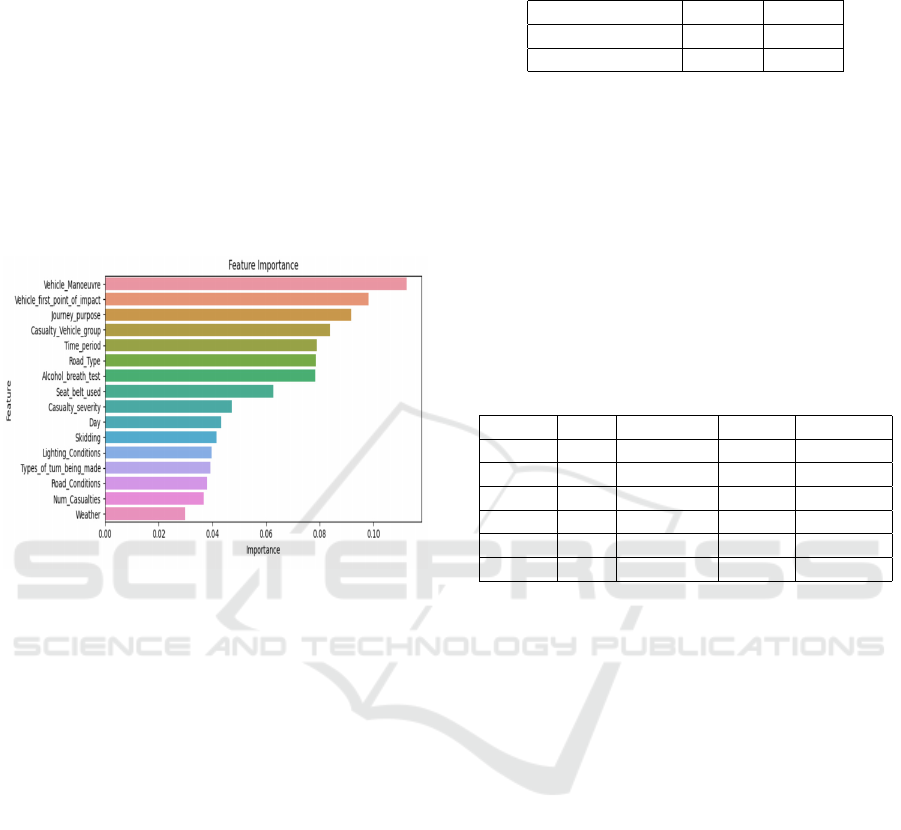
In the hotspot approach, only the geographical co-
ordinates of the accidents were used based on the
number of accidents defined in that hotspot region.
Because of this, the dataset’s features did not con-
tribute to the target congestion label, as shown in Fig-
ure 11.
This figure 11 shows the feature importance gen-
erated using the Random forest. It is evident that
the variables contribute less to the target (congestion
state). Even though the vehicle maneuver has the
highest importance, it contributes only 0.1 to the clas-
sification of the congestion state. Hence, the hotspot
labeling approach performance is deficient.
Figure 11: Feature importance for a hotspot-based approach
using Random Forest.
On the other hand, using the formula-based ap-
proach, model accuracy with 2-class (congestion
states are low and high) is 89%, while the 3-class
model accuracy is 66%. The low performance of the
model in 3-class variations is due to the lack of data.
The Bayesian model was trained on only 6000 records
of accidents from 6 years with certain criteria. As the
data is low, the proposed BN model performance is
affected.
The table 8 explains the performance of the pro-
posed model compared to the Base model. The pro-
posed model with hotspot labeling is used for the
comparison as the performance difference of the Base
model is significantly higher than the hotspot ap-
proach. In contrast, for the formula-based approach,
the model performance is slightly superior to the Base
model. In the proposed model, the structure of the
model is defined, and the parameters of the model are
learned from the data. In contrast, in the Base model,
both the structure and the parameters are learned from
the data. Even though the base model performance
is high, the complexity is extremely high simultane-
ously.
The Base model has generated many casualty re-
lationships between variables, drastically increasing
Table 8: Comparison of model performance between Pro-
posed model and Base model.
3-class 2-class
Proposed Model 0.45 0.52
Base Model 0.58 0.71
the conditional probability table (CPT) order. As the
complexity of the model rises, it takes longer training
time and requires higher computational resources. So,
there is also a need to look for the trade-off between
model performance and complexity.
Table 9 illustrates the performance of the proposed
Bayesian Network (BN) model for 2-class and is com-
pared with different machine learning models, namely
Logistic regression (LR), Decision Tree (DT), Ran-
dom Forest (RF), Support Vector Machine (SVM),
and K-Nearest Neighbor (K-NN).
Table 9: Comparison of Proposed model performance
against five different Machine learning models.
Model Acc Precision Recall F1-score
LR 0.88 0.87 0.98 0.92
DT 0.83 0.89 0.86 0.88
RF 0.87 0.87 0.95 0.91
SVM 0.88 0.87 0.98 0.92
K-NN 0.82 0.83 0.93 0.88
BN 0.89 0.90 0.72 0.81
All the models are computed on the same data,
split into an 80:20 ratio. All the models were trained
on 80% of the data, and the remaining 20% was used
to evaluate the model. The results are shown in ta-
ble 9. From the results, the accuracy of the proposed
BN model is slightly outperforming the other machine
learning models. The proposed model’s accuracy is
89%, while LR and SVM are closer, with an accuracy
of 88%. The proposed model is also outperforming
with 90% precision, while DT has a more intimate
precision of 89%. The evaluation metrics Recall and
F1-score are low for the proposed model, with 72%
and 81%, respectively.
To summarize the results, the proposed Bayesian
Network has shown competitive performance com-
pared to the above machine learning models. More-
over, as Bayesian Networks are probabilistic graphi-
cal structured models, they can provide interpretation
of results and explainability. It can be used to model
the causal relationship between traffic variables and
is also good at handling uncertainty. These qualities
of the Bayesian network offer an advantage in debug-
ging the root cause of traffic congestion and road ac-
cidents.
Bayesian Network for Analysis and Prediction of Traffic Congestion Using the Accident Data
29

8 CONCLUSION
This paper proposes a Bayesian Network that uses ac-
cident data analysis to label and predict congestion
states. There are various approaches to define conges-
tion from accident datasets. In this work, a novel tech-
nique for labeling congestions uses formula-based
and hotspot-based approaches. Furthermore, to ob-
serve the model performance, the congestion states
were classified into 3-class states (low, medium, and
high) and 2-class states (low, high). The results
show that the proposed model performance is higher
in 2-class predictions, especially with the formula-
based approach of 89.1% accuracy compared to the
hotspot approach. This is the novelty of our ap-
proach. This performance is compared with differ-
ent machine learning models (Random Forest, Deci-
sion Tree, SVM, Logistic Regression), which show
that the proposed model has slightly better accuracy
and precision. It also demonstrated comparable per-
formance with ML models.
The main limitation of this work is that we re-
strict our focus to accident information. Even though
it provides valuable insights, it does not consider all
the other factors causing congestion. Moreover, we
acknowledge the need for further refinement on a
hotspot-based approach to improve its performance,
and a dedicated Bayesian model needs to be imple-
mented. Further, we will build a Dynamic Bayesian
Network focusing on the hotspot approach to label
the congestion and follow its development trends. We
will also use various factors near the hotspot, like the
speed of other surrounding vehicles, junction type,
and other points of interest (Schools, Hospitals, etc.).
Besides accidents, future work will also focus on
the root causes of non-recurring congestion due to
unforeseen events, like construction works, weather-
related, and special events. Social media blogs and
platforms can provide further insights into accident
modeling. Moreover, it is also significant to under-
stand the correlation between road safety measures,
congestion, and their joint impact on urban mobility.
REFERENCES
Afrin, T. and Yodo, N. (2021). A probabilistic estimation of
traffic congestion using bayesian network. Measure-
ment, 174:109051.
Cambridgeshire County Council (2018). Cam-
bridgeshire road traffic collision data. https:
//data.cambridgeshireinsight.org.uk/dataset/
cambridgeshire-road-traffic-collision-data. Ac-
cessed: October 10, 2023.
Chang, H., Li, L., Huang, J., Zhang, Q., and Chin, K.-S.
(2022). Tracking traffic congestion and accidents us-
ing social media data: A case study of shanghai. Ac-
cident Analysis & Prevention, 169:106618.
Dias, C., Miska, M., Kuwahara, M., and Warita, H. (2009).
Relationship between congestion and traffic accidents
on expressways: an investigation with bayesian belief
networks. In Proceedings of 40th Annual Meeting of
Infrastructure Planning (JSCE), Japan.
Gupta, U., Varun, M., and Srinivasa, G. (2022). A compre-
hensive study of road traffic accidents: Hotspot anal-
ysis and severity prediction using machine learning.
In 2022 IEEE Bombay Section Signature Conference
(IBSSC), pages 1–6. IEEE.
Ji, X., Yue, W., Li, C., Chen, Y., Xue, N., and Sha, Z.
(2022). Digital twin empowered model free predic-
tion of accident-induced congestion in urban road net-
works. In 2022 IEEE 95th Vehicular Technology
Conference:(VTC2022-Spring), pages 1–6. IEEE.
Kjaerulff, U. B. and Madsen, A. L. (2008). Bayesian net-
works and influence diagrams. Springer Science+
Business Media, 200:114.
Ma, X., Ding, C., Luan, S., Wang, Y., and Wang, Y.
(2017). Prioritizing influential factors for freeway
incident clearance time prediction using the gradient
boosting decision trees method. IEEE Transactions on
Intelligent Transportation Systems, 18(9):2303–2310.
Nagarajan, R., Scutari, M., and L
`
ebre, S. (2013). Bayesian
networks in r. Springer, 122:125–127.
Santos, D., Saias, J., Quaresma, P., and Nogueira, V. B.
(2021). Machine learning approaches to traffic ac-
cident analysis and hotspot prediction. Computers,
10(12):157.
Wang, C. (2010). The relationship between traffic conges-
tion and road accidents: an econometric approach us-
ing GIS. PhD thesis, © Chao Wang.
Yang, Y., Gao, X., Guo, Z., and Chen, D. (2019). Learning
bayesian networks using the constrained maximum a
posteriori probability method. Pattern Recognition,
91:123–134.
Zeng, L., Hu, X., Han, Q., Ye, L., Wang, R., He, X., and Xu,
Y. (2016). Abnormal hotspots detection method based
on region real-time congestion factor. In 2016 IEEE
19th International Conference on Intelligent Trans-
portation Systems (ITSC), pages 749–753. IEEE.
Zhang, J., Junhua, W., and Shou’en, F. (2019). Prediction of
urban expressway total traffic accident duration based
on multiple linear regression and artificial neural net-
work. In 2019 5th International Conference on Trans-
portation Information and Safety (ICTIS), pages 503–
510. IEEE.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
30
