
Muli-Quay Combined Berth and Quay Crane Allocation Using the
Cuckoo Search Algorithm
Sheraz Aslam
a
, Michalis P. Michaelides
b
and Herodotos Herodotou
c
Department of Electrical Engineering, Computer Engineering and Informatics, Cyprus University of Technology, Cyprus
Keywords:
Port Efficiency, Berth and Quay Crane Allocation Problem, Metaheuristic, Cuckoo Search Algorithm.
Abstract:
This study investigates the combined berth allocation problem (BAP) and quay crane allocation problem
(QCAP) while considering a multi-quay setting. First, a mixed integer linear programming mathematical
model is developed based on various constraints and real port settings. Then, the multi-quay combined BAP
and QCAP is solved using both the exact method and a metaheuristic optimization method, namely, the cuckoo
search algorithm (CSA). This analysis pertains to a one-week planning scenario, utilizing data from a real
port. The results of the comparative analysis show that the proposed CSA can provide a near-optimal solution
(<1.02% from the optimal) at a fraction of the computational time (10 times faster), as compared to the exact
solution. This makes it suitable for solving larger instances of the combined BAP and QCAP for bigger termi-
nals and extended planning horizons.
1 INTRODUCTION
International maritime trade plays a pivotal role in
the global economy, accounting for over 80% of
the transportation of goods around the globe. Sea-
ports play a crucial role in managing this substan-
tial volume of goods, encountering various oper-
ational challenges such as berth allocation (BAP),
truck scheduling, storage allocation, quay crane allo-
cation (QCAP), and optimization of straddle carriers.
To satisfy the increasing demand, it is essential for ter-
minals to enhance their operations through the utiliza-
tion of contemporary technologies and optimization-
driven methodologies. Given this imperative require-
ment, there has been significant interest from both
academia and industry in devising innovative and ef-
fective approaches to optimize terminal operations
(Lind et al., 2020). At the terminals, berths and
quay cranes (QCs) are considered two of the basic
resources, and their efficient use can help to reduce
the total turnaround time of vessels (Li et al., 2020).
Hence, BAP and QCAP have been the most con-
cerned optimization problems in port planning and
operations (Aslam et al., 2020; Zheng et al., 2019).
a
https://orcid.org/0000-0003-4305-0908
b
https://orcid.org/0000-0002-0549-704X
c
https://orcid.org/0000-0002-8717-1691
The primary operations of marine ports are cate-
gorized into three main areas: marshaling yard, sea-
side, and landside. The first involves loading and un-
loading containers from incoming vessels using quay
cranes and other terminal resources. Inbound contain-
ers are stored in the marshaling yard. Finally, land-
side operations include activities related to dispatch-
ing containers to their final destinations using trucks
or trains (Aslam et al., 2022a). Berths and quay cranes
(QCs) are bottleneck resources in ports due to the lim-
ited coastal environment and complexity of port ac-
tivities (Li et al., 2020). Single or multiple berth lines
are used to berth arriving vessels, and QCs are used
to perform loading and unloading operations. All
vessels arriving at the port may wait at the anchor-
age, then enter the port and moor at their assigned
berth section to perform loading and discharging op-
erations. Since available berths and QCs are limited,
good planning and proper coordination between them
can improve terminal productivity. The BAP identi-
fies berthing positions and berthing times for arriving
vessels based on a variety of factors, such as expected
time of arrival (ETA), handling time or total load, re-
quested time of departure (RTD), etc. In addition, the
QCAP deals with the appropriate allocation of cranes
based on the BAP solution and availability of cranes,
since BAP and QCAP are interdependent problems
(Yu et al., 2019).
220
Aslam, S., Michaelides, M. and Herodotou, H.
Muli-Quay Combined Berth and Quay Crane Allocation Using the Cuckoo Search Algorithm.
DOI: 10.5220/0012553400003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 220-227
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

In the current literature, there are many studies
dealing with stand-alone BAP (Aslam et al., 2022a,
2021; Bierwirth and Meisel, 2015; Theofanis et al.,
2007; Ernst et al., 2017; Golias et al., 2009a,b; Al-
soufi et al., 2016). For instance, the authors of Theo-
fanis et al. (2007) solve a BAP with the objective of
reducing the number of late departures at the port of
Shahid Rajaee Shallow, Iran. Another study (Ernst
et al., 2017) also addresses the BAP to optimize the
departure times of vessels. The authors of Golias et al.
(2009a,b) also address BAP with the goal of optimal
berth allocation and propose heuristic-based solutions
to solve the problem. The work presented in Alsoufi
et al. (2016) also solves the BAP intending to reduce
the late departure of vessels by efficiently allocating
berths using a hybrid of genetic algorithm (GA) and
branch-and-cut (B&C) methods. Currently, there is
a growing tendency to address both BAP and QCAP
concurrently, since the number of cranes (and which
cranes in case of different handling productivity) as-
signed to a ship determines the berthing time of the
vessels (Xiang and Liu, 2021; Rodrigues and Agra,
2022). Most of the current studies consider only a
single quay, while they look at stand-alone BAP or
combined BAP-QCAP (Rodrigues and Agra, 2022).
There are only a few studies dealing with termi-
nals with multiple quays. For example, in a study
presented in Frojan et al. (2015), a solution for multi-
ple quays is proposed for BAP; however, in this study,
the total length of the quay is divided equally between
two quays and random data are used for the experi-
ments. In addition, practical constraints are not con-
sidered. A recent study in Krimi et al. (2020), also
solves the multi-quay BAP and concludes that the
proposed method does not always provide an optimal
solution and is sometimes 40% away from the opti-
mal solution. In another work, Gutierrez et al. (2019)
propose a fuzzy-based solution, but as the authors ac-
knowledge, the proposed method provides an optimal
solution when only up to 10 vessels are considered.
In our own previous work, we have explored using
metaheuristics, and in particular the cuckoo search al-
gorithm, for addressing the multi-quay scenario with
more practical settings but only for the standalone
BAP Aslam et al. (2022b, 2023). We have found only
a single research paper that addresses the combined
BAP and QCAP while considering multiple quays,
which employs fuzzy logic to solve the problem (Lu-
jan et al., 2021). However, the authors of that study
conclude that their approach is feasible only for small
instances and suggest the use of metaheuristics for
solving medium and large-size problems.
In this study, we explore the utilization of the
cuckoo search algorithm (CSA) to address the multi-
Time (hour)
v3
v1
v8
v9
v6
Time (hour)
v4
v2
v5
v10
Quay length (m)
Quay 1 (with 2 cranes) Quay 2 (with 3 cranes)
Quay length (m)
c1
c2
c1, c2
c3
c1
c1
c2
c1
c1, c2
v7
c2, c3
Figure 1: Combined BAP and QCAP solution with two
berthing quays (both are continuous) and 10 arriving ships.
quay combined BAP and QCAP to alleviate the over-
all service cost of ships, encompassing handling cost,
waiting costs, penalties for late departure, and penal-
ties due to non-optimal berth/quay assignment. Fur-
thermore, an appropriate mixed integer linear pro-
gramming model is established for this problem,
which is subsequently solved using both the exact
mathematical approach and the proposed CSA. Pre-
liminary results employing a real dataset from the
Port of Limassol, Cyprus demonstrate the efficacy of
the proposed CSA method, as compared to the exact
method.
The rest of the paper is organized as follows. Sec-
tion 2 provides the problem description and mathe-
matical formulation. Section 3 presents the developed
CSA method, while Section 4 shows the simulation
results from the case study at the Port of Limassol,
Cyprus. Section 5 concludes the study.
2 PROBLEM FORMULATION
The considered problem is discussed in this section
along with the main assumptions, followed by the
mathematical formulation of the problem.
2.1 Problem Explanation
The combined BAP and QCAP is an optimization
problem in which the objective is to allocate available
berths and available quay cranes (QCs) across time to
incoming ships to perform unloading/loading opera-
tions. An example of the solution of the problem for
two quays and 10 arriving ships is shown in Fig. 1. In
this research, we examine a practical configuration of
a port featuring multiple quays, each equipped with
a specific number of cranes. Additionally, all quays
adhere to a continuous style berthing layout, allowing
arriving vessels to be docked at any location along
the quay. Vessels are arriving in a dynamic fash-
Muli-Quay Combined Berth and Quay Crane Allocation Using the Cuckoo Search Algorithm
221

Table 1: Nomenclature and notations.
Name Explanation
Notations
AQ
v
Alternative quay for vessel v
AT
v
Expected arrival time of vessel v
BP
v
Planned berthing position of vessel v
BT
v
Planned berthing time of vessel v
C
h
v
Per hour handling cost of vessel v
C
w
v
Per hour waiting cost of vessel v
C
ld
v
Per hour late departure cost of vessel v
C
nob
v
Penalty for non-optimal berthing position
of v
C
noq
v
Penalty for non-optimal berthing quay of v
c
min
Minimum berthing position served by
crane c
c
max
Maximum berthing position served by
crane c
DT
v
Expected departure time of vessel v
k
v
Set of cranes assigned to vessel v (encoded
in binary form)
HT
v
Handling time of vessel v
HP
c
q
Handling productivity of crane c located on
quay q
L
v
Length of vessel v
L
q
Length of quay q
LDT
v
Late departure time of vessel v
Load
v
Total load of vessel v
Q
v
Planned berthing quay of vessel v
SC
c
q
Service cost per hour of crane c located on
quay q
PBP
v
Preferred berthing position of vessel v
PBQ
v
Preferred quay of vessel v
SD Safety distance between the berthing posi-
tions of two ships
SE Safety port entrance time between consec-
utive berthings
ST Safety time between the berthing times of
two ships
W T
v
Waiting time of vessel v
Sets and Indices
V Set of arriving vessels; v ∈ V a vessel
Q Set of quays; q ∈ Q a quay
B(q) Set of available berth positions on quay q ∈
Q; b ∈ B(q) a berth position
C(q) Set of quay cranes on quay q ∈ Q; c ∈ C(q)
a crane
K(q) Power set of cranes set C(q); k ∈ K(q) rep-
resents a subset of cranes from C(q) en-
coded in a binary form
T Set of time periods (planing horizon); t ∈ T
a time period
ion; however, their expected arrival times are known
in advance. The installed QCs perform loading and
unloading operations with some average productivity,
which can be different for each QC.
This study considers that the following informa-
tion is known in advance: number of ships, quays,
and lengths of quays; estimated times of arrival and
departure for each vessel; preferred berthing quay and
position for each vessel; the planning horizon (which
is divided into equal time intervals); and all costs and
penalties. In addition, the vessels cannot change their
berthing position during loading/unloading (i.e., berth
shifting is not considered).
2.2 Mathematical Formulation for
Multi-Quay Combined BAP and
QCAP
The primary objective of the multi-quay combined
BAP and QCAP is to allocate optimal berthing posi-
tions at the preferred quays, berthing times, and QCs
to arriving vessels in order to reduce the total service
cost (that is the combination of handling cost, waiting
costs, and several penalties), as shown in the below
cost function:
Cost (v, Q
v
, BP
v
, k
v
, BT
v
) = HT
v
· [C
h
v
+ f (v, Q
v
, BP
v
)]
+W T
v
·C
w
v
+ LDT
v
·C
ld
v
.
(1)
The first term of the cost function calculates the to-
tal handling cost based on the handling time HT
v
(in
hours), the handling cost per hour C
h
v
, and a penalty
function f (.) for assigning additional cost to non-
optimal quay and/or berth assignments. In this study,
the handling time is calculated based on the total load
of the vessel v and the handling productivity of the
cranes assigned to v. The second term in (1) calcu-
lates the total waiting cost and it depends on the total
waiting time W T
v
of vessel v and the per hour waiting
cost C
w
v
. The waiting time W T
v
of any vessel v is the
difference between berthing time BT
v
and arrival time
AT
v
. The last term in (1) calculates the penalty cost
due to late departures, which is based on the late de-
parture time LDT
v
and the per hour penalty for late de-
parture C
ld
v
. The late departure time is non-zero when
the berthing time BT
v
plus the handling time HT
v
ex-
ceeds the planned departure time DT
v
.
The primary goal of this work is to address the com-
bined BAP and QCAP within a multi-quay setting,
aiming to minimize the overall cost encompassing
handling costs, waiting costs, and various penalties.
The objective function is expressed by the following
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
222

equation,
minimize
∑
v ∈ V
∑
q ∈ Q
∑
b ∈ B(q)
∑
k ∈ K(q)
∑
t ∈ T
Cost(v, q, b, k,t) · x
vqbkt
,
(2)
subject to the following constraints:
x
vqbkt
∈ {0, 1}, ∀ v ∈ V, q ∈ Q, b ∈ B(q), k ∈ K(q),t ∈ T
(3)
∑
q ∈ Q
∑
b ∈ B(q)
∑
k ∈ K(q)
∑
t ∈ T
x
vqbkt
= 1, ∀ v ∈ V (4)
BT
v
≥ AT
v
, ∀ v ∈ V (5)
BT
v
− BT
u
≥ SE ∀ v ̸= u ∈ V (6)
BP
v
+ L
v
≤ L
q
, ∀ v ∈ V, q = Q
v
(7)
∑
v̸=u ∈V
BP
v
+L
v
+SD
∑
b=BP
v
−L
u
−SD
∑
k ∈ K(q)
BT
v
+HT
v
+ST −1
∑
t=BT
v
−HT
u
−ST +1
x
uqbkt
= 0,
∀ v ̸= u ∈ V, q = Q
v
= Q
u
(8)
∑
v̸=u ∈V
∑
b ∈B(q)
∑
k ∈ K(q)
k & k
v
̸= 0
BT
v
+HT
v
+ST −1
∑
t=BT
v
−HT
u
−ST +1
x
uqbkt
= 0,
∀ v ̸= u ∈ V, q = Q
v
= Q
u
(9)
c
min
< BP
v
+ L
v
& BP
v
< c
max
, ∀ v ∈ V, c ∈ k
v
(10)
The variable x
vqbkt
mentioned in constraint (3) takes
a value of 1 if vessel v is moored at berthing position
b of quay q at time t to be served by cranes k, and
0 otherwise. Constraint (4) ensures that each arriving
vessel is docked only once. In constraint (5), it is stip-
ulated that the scheduled berthing time BT
v
for a ves-
sel v must always be equal to or greater than its arrival
time AT
v
. The constraint (6) guarantees a minimum
safety entrance time (SE) between any two consec-
utive berthing operations. Constraint (7) ensures the
length of vessel v plus its berthing position does not
exceed the length of quay q, where it is moored. Con-
straint (8) restricts two vessels from overlapping dur-
ing mooring, both in terms of berthing positions, as
well as berthing times. Furthermore, it also ensures a
safety time (ST ) and safety distance (SD) between the
berthing of two ships. Constraint (9) restricts the set
of cranes k that is assigned to vessel u to not contain
any of the cranes allocated to another vessel v during
the same time period. Finally, constraint (10) ensures
that any crane c assigned to vessel v can reach the ves-
sel by checking that there is an overlap between the
minimum and maximum berthing positions served by
c and the quay positions occupied by v.
3 CUCKOO SEARCH
ALGORITHM
The cuckoo search algorithm is a relatively new
nature-inspired optimization method proposed by
Yang and Deb (2009) that has proven efficient in solv-
ing several global optimization problems. CSA is
based on the basic rules of breeding parasitism of
some cuckoo species and then extended by the so-
called Levy flights Yang and Deb (2009) instead of a
simple isotropic random walk (Yang and Deb, 2014).
Some cuckoo birds follow an aggressive production
strategy of laying eggs in communal nests and pos-
sibly removing eggs from other birds (host birds) to
maximize the probability of hatching for their own
eggs. When host birds discover the cuckoo eggs,
hosts either discard or abandon the eggs and build
new nests. Overall, the CSA operates on the basis of
cuckoo reproductive behavior by following three key
rules (Yang and Deb, 2009; Aslam et al., 2023):
1. one egg is dumped at a time by each cuckoo into
a randomly chosen nest;
2. the nests with high-quality eggs are retained and
utilized for the subsequent generation;
3. the quantity of host nests remains constant, and a
host bird detects an egg laid by a cuckoo with a
probability p
α
∈ (0, 1).
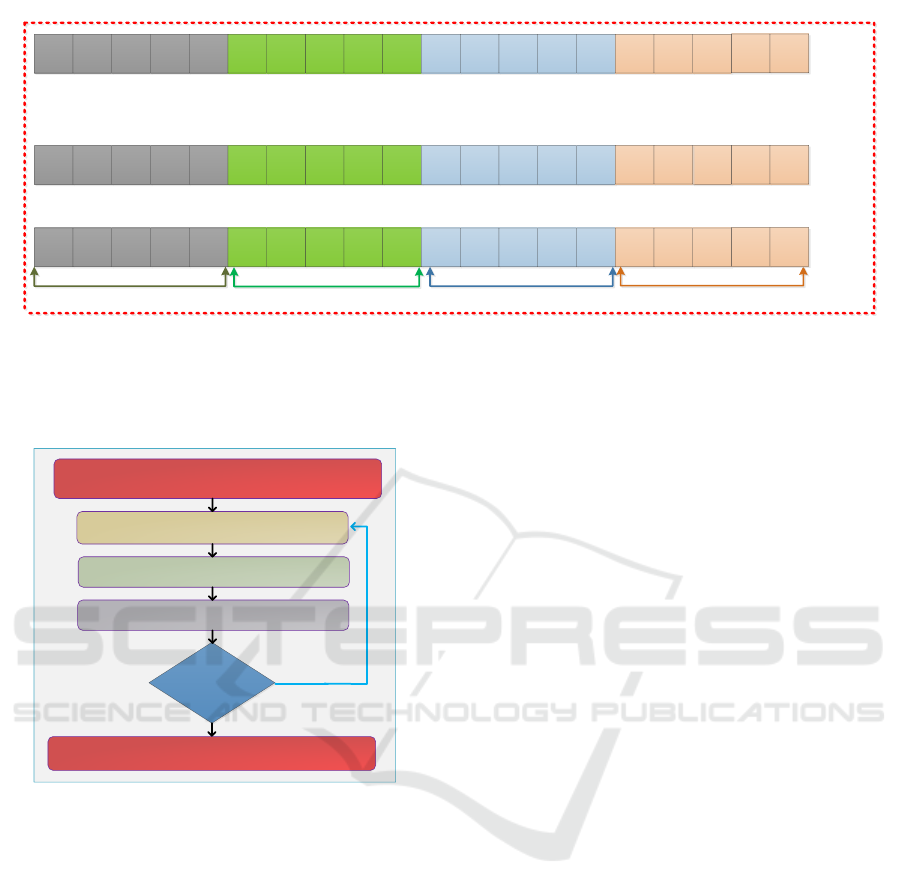
The correspondence between CSA and the multi-quay
combined BAP and QCAP is outlined as follows. A
single nest represents a collection of potential solu-
tions that include berthing times, quays, positions,
and a potential set of assigned cranes for all arriv-
ing ships, as illustrated in Fig. 2. Each egg within
a nest signifies either a berthing time, berthing quay,
berthing position in a quay for an arriving ship, or a
potential set of cranes (using binary representation).
Meanwhile, a cuckoo egg represents a new or im-
proved solution (representing either a berthing time,
berthing quay, berthing position, or set of cranes).
In Fig.3, the operational flow of CSA for the
multi-quay combined BAP and QCAP is depicted.
Muli-Quay Combined Berth and Quay Crane Allocation Using the Cuckoo Search Algorithm
223
7 10 33 49 54 3
8 11 30 46 57 2
9 10 30 47 57 1
. . .
Berthing times by CSA for 5 ships
1 2 1 5 70 133 68 333 220
0
{00000}
3
{00011}
7
{00111}
4 2 1 1 99 310 75 310 211
4
{00100}
2 2 1 5 155 88
Berthing quays by CSA for 5 ships
66 332 222
16
{10000}
7
{00111}
8
{01000}
Berthing positions by CSA for 5 ships
3
{00011}
Nest i
Nest i+1
Nest k
0
{00000}
24
{11000}
0
{00000}
6
{00110}
Cranes assigned by CSA for 5 ships
0
{00000}
0
{00000}
0
{00000}
Figure 2: The representation of solutions by CSA with five ships. Each nest forms a full solution to the problem and contains
five berthing times, berthing quays, berthing positions, and crane assignments, one for each ship. The binary representation
of each crane assignment value denotes the set of cranes assigned to the ship.
Initial population of host nests and eggs
Get cuckoo with eggs by Levy flights
Fitness evaluation and store the best nest
with good solution
Termination
criteria?
Find best nest with minimum objective value and
terminate algorithm
Yes
No
Discard worst nests and build new ones
with new solutions
Figure 3: Flow chart of Cuckoo Search Algorithm.
The total number of host nests shows each iteration’s
search space, which remains constant (assuming 100
in our work). During each iteration, 100 solutions
(nests) are generated, and the size of each solution
is four times the total number of ships, as illustrated
in Fig.2. All the solutions are compared at each it-
eration and the best solution (nest) is considered the
local best. At the next step, some low-quality solu-
tions (nests) are discarded and new ones are built to
avoid getting stuck at local optima. Then, the fitness
of new solutions is calculated and the best nest with
high quality solutions is selected. All the steps are re-
peated until termination criteria are met (as depicted
in Fig. 3).
4 CASE STUDY: PORT OF
LIMASSOL, CYPRUS
A real-world case study from the Port of Limassol,
Cyprus, is used to test the performance of the pro-
posed CSA-based approach for combined berth and
quay crane allocation to ships arriving during the first
week of March 2018 (some example data for 10 of the
ships is presented in Table 2). In the Port of Limassol,
there are five commercial berthing quays, all of which
are continuous. All quays are of different lengths;
Container Quay: 800m; Ro-Ro Quay: 450m; West
Quay: 770m; North Quay: 430m; and East Quay:
480m. There are only two container quays, i.e., the
Container Quay and the Ro-Ro Quay, and a total of
seven cranes are installed at both quays (5 at the Con-
tainer Quay and 2 at Ro-Ro Quay). In addition, the
Container Quay is further divided into two parts; two
cranes operate on the left side, while the remaining
three cranes operate on the right side; note there is a
dead space in between the two parts of the container
quay. It should also be noted that the cranes can only
move within a certain range from their location. Fur-
thermore, the cranes cannot cross each other and all
have different handling productivity rates which are
known.
The newly developed methods for multi-quay
combined BAP and QCAP have been implemented in
MATLAB R2021b. All experiments are performed
using a Windows 10 computer system with a 3.4 GHz
Core i7 and 16 GB RAM.
Fig. 4 and Fig. 5 show the solutions proposed by
CSA and MILP, respectively, for the allocation of
berths and quay cranes. The rectangles in the fig-
ures show each vessel, designating the berthing time
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
224
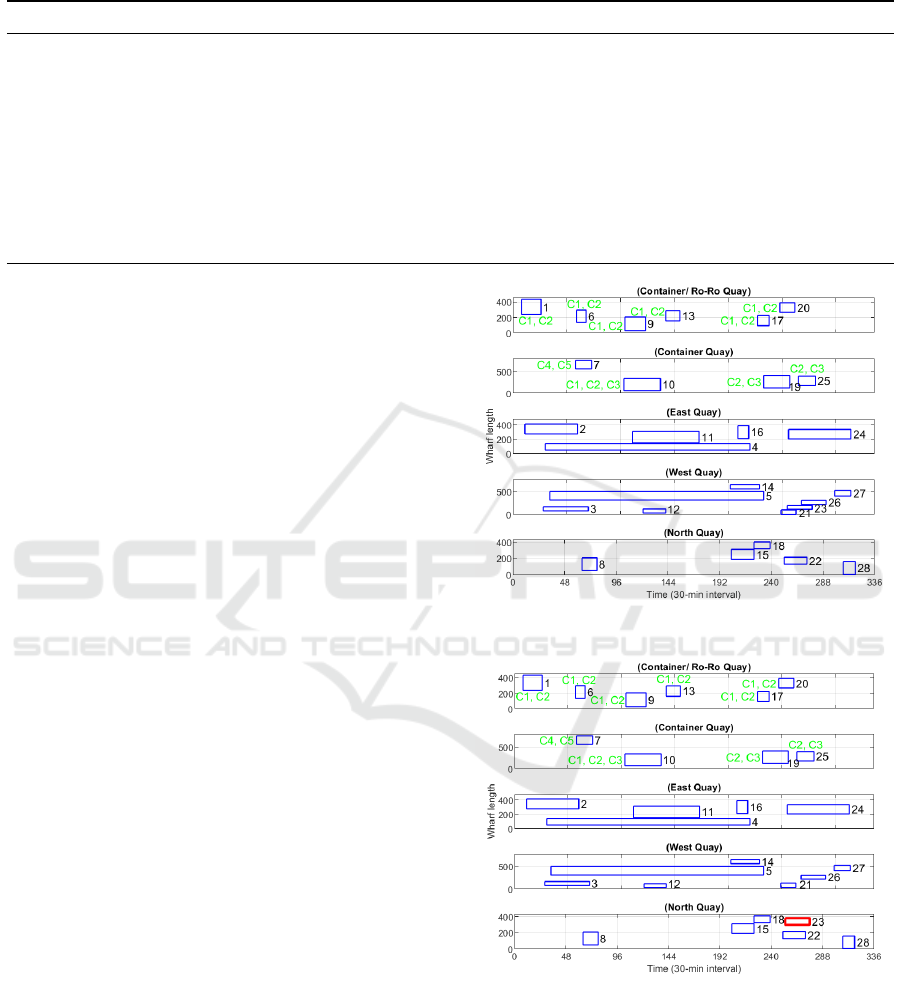
Table 2: Example dataset for 10 out of 28 ships that arrived at the Port of Limassol, Cyprus during the first week of March
2018.
Ship # ETA (day\time) HT (min.) ETD (day\time) PBQ ABQ PBP LoS (m)
1 1\04:00 919 1\22:30 Ro-Ro Quay Container Quay 240 194
2 1\05:30 1490 2\06:50 East Quay – 276 139
3 1\14:00 1285 2\12:50 West Quay North Quay 84 84
4 1\15:00 5700 5\14:03 East Quay – 51 89
5 1\17:00 5970 5\21:00 West Quay North Quay 314 190
6 2\04:30 470 2\13:50 Ro-Ro Quay Container Quay 138 159
7 2\05:00 168 2\09:30 Container Quay Ro-Ro Quay 571 196
8 2\08:00 440 2\15:55 North Quay West Quay 53 155
9 3\04:00 905 3\20:50 Ro-Ro Quay Container Quay 31 175
10 3\03:30 1331 4\06:15 Container Quay Ro-Ro Quay 389 277
at the x-axis, and the berthing position of each ves-
sel at the y-axis. The number in front of the rectan-
gle shows the ship index and the text in green color
shows the assigned set of cranes to each vessel. In
addition, ships with blue rectangles indicate that they
are moored at their preferred berthing quay (PBQ),
while ships moored in their alternate berthing quay
(ABQ) are colored red. Vessels are moored in the
ABQ typically when there is a long waiting time be-
fore the optimal berth assignment, which may result
in delayed departures and increased cost. From Fig. 5
it can be seen that vessel 23 is moored at the North
Quay (ABQ) instead of the West Quay (PBQ) when
MILP is used. On the other hand, CSA places vessel
23 at its PBQ but at the expense of placing both ves-
sels 21 and 23 far from their preferred berthing posi-
tion (PBP), thereby increasing the total service cost.
It is also important to note that there are only two
quays where QCs are installed and assigned; the re-
maining quays are passenger/general cargo quays and
no cranes are installed on these quays. For container
quays, the total operating time of the vessels is cal-
culated based on the number of cranes used and their
productivity. However, in the case of the other three
quays, the total operating time of the vessels is pro-
vided as an input. In a week, four ships arrive at the
Container Quay and six ships at the Ro-Ro Quay, all
of which are assigned the optimal number of cranes
using both implemented algorithms.
An in-depth comparison of the proposed method
CSA with the exact MILP method is provided in Table
3 in terms of the different costs and computation time
for the one-week tested scenario. Waiting costs are in-
curred when a vessel v has to wait before the optimal
berth allocation, while NOB costs are included in the
total service cost when a vessel v is berthed at a place
other than its PBP or at the ABQ instead of the PBQ.
NOB is calculated by determining the absolute differ-
ence between the optimal and the assigned berthing
positions, as determined by any algorithm. However,
Figure 4: Solution by CSA.
Figure 5: Solution by MILP.
a fixed penalty is added in case of berth allocation
at the ABQ. Furthermore, to avoid the berthing of
vessels to quays other than the ABQ or the PBQ, a
penalty of infinity is added. From this table, it can
be seen that MILP has a minimum total cost (10090)
with 0 waiting cost and 120 cost for late departures.
However, it provides an optimal solution at the ex-
Muli-Quay Combined Berth and Quay Crane Allocation Using the Cuckoo Search Algorithm
225

Table 3: Comparative analysis of CSA and MILP.
Algorithms: CSA MILP
Waiting cost (C) 50 0
NOB cost (C) 250 100
Normal handling cost (C) 9870 9870
Late departure cost (C) 140 120
Total service cost (C) 10320 10090
Computation time (sec) 84.73 912.55
pense of increased computation time, which is 912.55
seconds (more than 15 minutes) for the one-week sce-
nario. On the other hand, the total service cost for
CSA is near-optimal (10320) and closely resembles
MILP. However, CSA solves the problem in just 84.73
seconds, a 10× performance improvement. Note that
for larger problem instances (i.e., more ships or in-
creased planning horizon) using MILP becomes pro-
hibitive due to the exponentially growing complexity
of the problem. Based on the aforementioned compar-
ative analysis and discussion, it can be inferred that
the recently developed CSA-based approach for the
multi-quay combined BAP and QCAP is highly effec-
tive and capable of delivering a solution that is close
to optimal within a reasonable computation time.
5 CONCLUSIONS
This study investigates the multi-quay combined
berth allocation problem (BAP) and quay crane allo-
cation problem (QCAP) with the objective of mini-
mizing the total service cost for arriving vessels. To
solve the multi-quay combined BAP and QCAP, a
MILP model is formulated and solved using both an
exact method and our developed metaheuristic solu-
tion based on the cuckoo search algorithm (CSA).
Evaluation results using real data from the Port of Li-
massol, Cyprus, confirmed the efficiency of the CSA,
as compared to the exact method (MILP), since it
was able to provide near-optimal results for the tested
scenario at a fraction of the computation time. The
MILP takes too much time (912.55 seconds) to solve
the problem; however, the CSA method solves the
same problem in only 84.73 seconds and the achieved
objective value (10320) is only 1.02% away from
the optimal solution (10090 euro). This makes the
CSA method more suitable for addressing real-world
problems with increased complexity where using the
MILP becomes prohibitive.
The future plan is to further evaluate CSA’s per-
formance for larger problem instances of the multi-
quay combined BAP and QCAP (with a larger num-
ber of ships and/or planning horizon). We also plan to
implement and compare other popular computational
intelligence methods such as genetic algorithm and
particle swarm optimization.
ACKNOWLEDGEMENTS
This work was supported by the European Union’s
Horizon Europe program for Research and In-
novation through the aerOS project under Grant
No. 101069732 as well as by the European
Regional Development Fund and the Republic of
Cyprus through the Cyprus Research and Innovation
Foundation (MDigi-I: STRATEGIC INFRASTRUC-
TURES/1222/0113).
REFERENCES
Alsoufi, G., Yang, X., and Salhi, A. (2016). Robust berth
allocation using a hybrid approach combining branch-
and-cut and the genetic algorithm. In International
workshop on hybrid metaheuristics, pages 187–201.
Springer.
Aslam, S., Michaelides, M. P., and Herodotou, H. (2020).
Internet of ships: A survey on architectures, emerging
applications, and challenges. IEEE Internet of Things
Journal, 7:9714–9727.
Aslam, S., Michaelides, M. P., and Herodotou, H.
(2021). Dynamic and continuous berth allocation us-
ing cuckoo search optimization. In International Con-
ference on Vehicle Technology and Intelligent Trans-
port Systems (VEHITS), pages 72–81.
Aslam, S., Michaelides, M. P., and Herodotou, H. (2022a).
Enhanced berth allocation using the cuckoo search al-
gorithm. SN Computer Science, 3(4):1–15.
Aslam, S., Michaelides, M. P., and Herodotou, H. (2022b).
Optimizing multi-quay berth allocation using the
cuckoo search algorithm. In Proceedings of the 8th
International Conference on Vehicle Technology and
Intelligent Transport Systems (VEHITS), pages 124–
133.
Aslam, S., Michaelides, M. P., and Herodotou, H. (2023).
Berth allocation considering multiple quays: A practi-
cal approach using cuckoo search optimization. Jour-
nal of Marine Science and Engineering, 11(7):1280.
Bierwirth, C. and Meisel, F. (2015). A follow-up survey of
berth allocation and quay crane scheduling problems
in container terminals. European Journal of Opera-
tional Research, 244(3):675–689.
Ernst, A. T., O
˘
guz, C., Singh, G., and Taherkhani, G.
(2017). Mathematical models for the berth allocation
problem in dry bulk terminals. Journal of Scheduling,
20(5):459–473.
Frojan, P., Correcher, J. F., Alvarez-Valdes, R., Koulouris,
G., and Tamarit, J. M. (2015). The continuous
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
226

berth allocation problem in a container terminal with
multiple quays. Expert Systems with Applications,
42(21):7356–7366.
Golias, M. M., Boile, M., and Theofanis, S. (2009a).
Berth scheduling by customer service differentia-
tion: A multi-objective approach. Transportation Re-
search Part E: Logistics and Transportation Review,
45(6):878–892.
Golias, M. M., Saharidis, G. K., Boile, M., Theofanis, S.,
and Ierapetritou, M. G. (2009b). The berth allocation
problem: Optimizing vessel arrival time. Maritime
Economics & Logistics, 11(4):358–377.
Gutierrez, F., Lujan, E., Asmat, R., and Vergara, E. (2019).
Fully fuzzy linear programming model for the berth
allocation problem with two quays. In Uncertainty
Management with Fuzzy and Rough Sets, pages 87–
113. Springer.
Krimi, I., Todosijevi
´
c, R., Benmansour, R., Ratli, M.,
El Cadi, A. A., and Aloullal, A. (2020). Modelling and
solving the multi-quays berth allocation and crane as-
signment problem with availability constraints. Jour-
nal of Global Optimization, 78(2):349–373.
Li, Y., Chu, F., Zheng, F., and Liu, M. (2020). A bi-
objective optimization for integrated berth allocation
and quay crane assignment with preventive mainte-
nance activities. IEEE Transactions on Intelligent
Transportation Systems.
Lind, M., Michaelides, M. P., Robert, W., and Richard,
W. T. (2020). Maritime informatics. Springer.
Lujan, E., Vergara, E., Rodriguez-Melquiades, J., Jim
´
enez-
Carri
´
on, M., Sabino-Escobar, C., and Gutierrez, F.
(2021). A fuzzy optimization model for the berth al-
location problem and quay crane allocation problem
(bap+ qcap) with n quays. Journal of Marine Science
and Engineering, 9(2):152.
Rodrigues, F. and Agra, A. (2022). Berth allocation and
quay crane assignment/scheduling problem under un-
certainty: a survey. European Journal of Operational
Research.
Theofanis, S., Boile, M., and Golias, M. (2007). An op-
timization based genetic algorithm heuristic for the
berth allocation problem. In 2007 IEEE Congress on
Evolutionary Computation, pages 4439–4445. IEEE.
Xiang, X. and Liu, C. (2021). An almost robust optimiza-
tion model for integrated berth allocation and quay
crane assignment problem. Omega, 104:102455.
Yang, X.-S. and Deb, S. (2009). Cuckoo Search via L
´
evy
Flights. In World Congress on Nature & Biologically
Inspired Computing (NaBIC), pages 210–214. IEEE.
Yang, X.-S. and Deb, S. (2014). Cuckoo search: recent ad-
vances and applications. Neural Computing and ap-
plications, 24(1):169–174.
Yu, T., Qiang, Z., and Benfei, Z. (2019). A genetic
algorithm based on spatiotemporal conflict between
continuous berth-allocation and time-varying spe-
cific crane assignment. Engineering Optimization,
51(3):390–411.
Zheng, F., Li, Y., Chu, F., Liu, M., and Xu, Y. (2019). In-
tegrated berth allocation and quay crane assignment
with maintenance activities. International Journal of
Production Research, 57(11):3478–3503.
Muli-Quay Combined Berth and Quay Crane Allocation Using the Cuckoo Search Algorithm
227
