
Protocol Interoperability for Intelligent Transportation Systems
Jonas Vogt
1, 2 a
and Hans D. Schotten
1 b
1
Division of Wireless Communications and Navigation (WiCoN), University of Kaiserslautern-Landau, Kaiserslautern,
Germany
2
ITS Research Group, University of Applied Sciences, htw saar, Saarbr
¨
ucken, Germany
Keywords:
Intelligent Transportation Systems, Protocols, Interoperability, Cooperative Connected and Automated
Mobility.
Abstract:
Transportation is an essential part of daily life. To ensure optimal transportation of people and goods, all
stakeholders, including traffic participants, infrastructure providers, and service providers, must be intercon-
nected. This interconnectivity enables efficient traffic management, energy and noise reduction, and safe
driving. However, integrating different systems via various communication technologies and protocols can
pose challenges to ensuring information quality, reliability, security, and privacy. As communication becomes
a more critical safety factor for connected and automated driving, and more systems are involved in commu-
nication, ensuring data quality becomes increasingly crucial. This includes data availability, range, precision,
privacy, and security. This paper presents an evaluation mechanism for assessing the quality of standardized
protocols in terms of interoperability. It can be concluded that, although many protocols exist in the field of
intelligent transportation systems, they transport similar information but differ in details that may impact the
applications working with that information.
1 INTRODUCTION
In the field of Intelligent Transportation Systems
(ITS), separate ecosystems have been established
in recent decades. These ecosystem includes in-
vehicle, traffic infrastructure, service-oriented, and
direct communication systems. As current efforts to
shape future mobility include Cooperative, Connected
and Automated Mobility (CCAM), these once distinct
ecosystems must now interact. This interaction is es-
sential to the creation of a safe, eco-friendly, and effi-
cient transportation system. Users are more likely to
adopt new multimodal mobility options if their mobil-
ity experience does not deteriorate. Therefore, the ac-
ceptance of these options is determined by these three
objectives. Each ecosystem has its own communica-
tion and application needs, which result in the cre-
ation of domain-specific specifications for data repre-
sentation, application and communication protocols,
and communication technologies. Interoperability is
crucial for the development of ITS and future mobil-
ity.
Protocols are used in various scenarios and fields
a
https://orcid.org/0000-0002-5856-0460
b
https://orcid.org/0000-0001-5005-3635
and can serve general or specific purposes. They can
be categorized based on their formal and informal
specifications. The protocol specification combines
different components, starting with the specification
of the protocol’s context. Then, the protocol descrip-
tion is specified, combining messaging and behavior.
Finally, data values are defined. For example, the In-
ternet Protocol (IP) is a versatile protocol used in nu-
merous contexts, serving as a network protocol for the
Internet. In contrast, the Decentralized Environmen-
tal Notification Message (DENM) is an application
layer protocol created for a specific purpose and en-
vironment, specifically for use in Cooperative Intelli-
gent Transportation Systems (C-ITS).
In this diverse environment, it is important to es-
tablish clear guidelines for transmitting data, includ-
ing when and what data should be transmitted. Ap-
plication developers can no longer rely on closed
ecosystems, such as those found in-vehicle or in traf-
fic infrastructure. Instead, they must be able to adapt
to changing environments, unfamiliar data sources,
and fluid communication environments. To do so,
they must establish mechanisms for distinguishing
between different protocols, data representations, and
communication behaviors. It is important to note that
228
Vogt, J. and Schotten, H.
Protocol Interoperability for Intelligent Transportation Systems.
DOI: 10.5220/0012554700003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 228-237
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

not all protocols may be adapted and common proto-
cols and data formats may not be used. We have de-
veloped an evaluation scheme to help application im-
plementers to identify possible interoperability issues.
This will enable developers to focus their attention on
those issues. This is just the first step. A complete
evaluation involves assessing the connection between
specifications based on references, comparing formal
data specifications automatically, evaluating the data
itself, and assessing the ecosystems and architectures
for applications that use the specifications. These ad-
ditional steps are not included in this paper.
The paper is structured as follows: Section 2 de-
tails related work, Section 3 outlines the classifica-
tion approach, Section 4 presents the findings and
Section 5 discusses these results. Finally, Section 6
presents the conclusion and provides an outlook for
future work.
2 RELATED WORK
The number of ITS standards is constantly chang-
ing. Publishers release new standards, remove out-
dated specifications, and revise current ones. Stan-
dards organizations monitor these changes through
their in-house and external mailing lists and websites.
There are publications, such as book chapters (e.g.,
(Williams, 2008), (Ernst, 2021)), and papers that sum-
marize the activities related to standards.
In their 2009 publication (Festag and Hess, 2009),
Festag and Hess provide an account of the early stan-
dardization processes and objectives in Europe. The
European ITS Station Reference Architecture is de-
tailed in (Festag, 2014), (Kosch et al., 2009), and
(Sousa et al., 2017) with specific attention to the co-
operative ITS (C-ITS) segment for direct communi-
cation. Various publications outline the current sta-
tus of ITS standardization and deployment in differ-
ent countries or regions. One example is Macioszek’s
study (Macioszek, 2014), which focuses on the situ-
ation in Poland. (Feng et al., 2017) discuss standard-
ization in China, while (Lim, 2012) and (Sugimoto,
1999) present plans for ITS in Korea and Japan, re-
spectively. (Padmadas et al., 2010) explain the de-
ployment of ITS in developing countries using the
example of license plate recognition and Djalalov
(Djalalov, 2013) discusses the role of standardization
in general. (Lonc and Cincilla, 2016) and (Hamida
et al., 2015) provide detailed information on secu-
rity aspects related to the architecture. Identity and
credential management requirements are detailed in
(Khodaei and Papadimitratos, 2015). The distribu-
tion of data and knowledge systems is examined in
(P
ˇ
ribyl et al., 2021), and ITS architecture require-
ments for information distribution based on applica-
tion viewpoints are available in (Ren et al., 2001).
Research projects like sim
T D
(St
¨
ubing et al., 2010)
and C-MOBilE (Lu et al., 2018) also address these
topics. Standardization issues related to communica-
tion are covered in (Nsonga and Ustun, 2016) (EV
IEC 61850 and WAVE), as well as in (Zeadally et al.,
2020) (5G NR V2X and IEEE 802.11bd). Special at-
tention should be paid to functional safety in ITS in-
teroperability, as highlighted in (Mariani et al., 2021).
Standardization organizations provide overviews of
their specifications (CEN, 2024), (ETSI, 2024), (ISO,
2024). The International Telecommunication Union
(ITU) offers a synopsis of standardization documents
from different SDOs (ITU, 2024), allowing for easy
searching of documents from 16 organizations, with
a database of 1,265 files. Interoperability is discussed
in other ecosystems using two approaches: defining a
common protocol/mapping or introducing a middle-
ware. The former approach has been explored in sev-
eral studies ((Park et al., 2009), (Cruz-S’nchez et al.,
2012), (Yacchirema et al., 2017), (Derhamy et al.,
2017), and (Bromberg et al., 2011)), while the lat-
ter has been investigated in other works ((Nakazawa
et al., 2006), (Cavalieri, 2021), and (Bouloukakis
et al., 2019)). Both approaches have their challenges.
The former requires a consensus among all stake-
holders, while the latter would require modifications
to various areas, which would not be feasible given
the current framework conditions in both vehicles and
traffic infrastructure.
Although there is literature that offers a general
overview of the field, none has provided insights into
interoperability specific to ITS. To the best of our
knowledge, specific research has been conducted on
standards interoperability in the various ITS ecosys-
tems.
3 APPROACH
The evaluation approach is based on classifiable cri-
teria. The following section outlines these criteria,
along with relevant calculations.
The criteria are divided into five groups: meta-
information, protocol category, communication par-
ticipants, protocol description, and protocol testing.
The meta-information describes the formal specifica-
tions, while the protocol category specifies the type
and purpose of the protocol. The criteria for com-
munication participants outline the systems and en-
tities involved in communication and categorize the
communication itself. The protocol description out-
Protocol Interoperability for Intelligent Transportation Systems
229

lines the protocol’s execution environment, intended
use, and context. Protocol testing incorporates mech-
anisms to assess the protocol’s implementation.
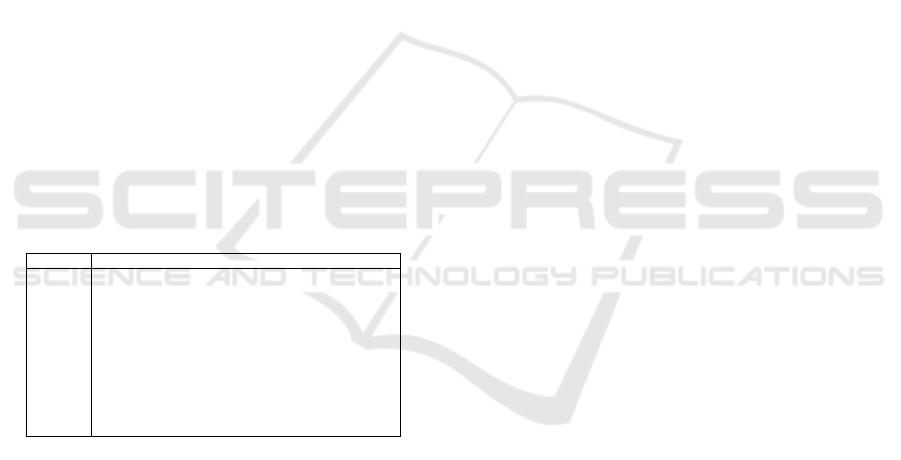
Figure 1 shows the five main categories of clas-
sification criteria: meta information, protocol cate-
gory, communication participants, protocol descrip-
tion, and protocol testing. These categories answer
the questions: what are the formal criteria, what is the
context/purpose of the protocol, who is communicat-
ing with whom, how is the protocol described, and
how can the protocol be tested and validated?
Figure 1 displays a total of 39 criteria. The criteria
are organized into separate vectors to ensure objectiv-
ity bias and provide a clear picture. Sub-vectors are
evaluated as a group. Values that are not comparable
or consist of text are divided into a more detailed set
of parameters to facilitate relative comparison. For
values that already consist of multiple values, a sub-
vector is created.
The following list provides guidelines for compar-
ing standards, focusing on the most important criteria.
• p
is+ik
. The protocol issuer is identified solely
by name, making it difficult to compare. To fa-
cilitate comparison, a vector of determining fac-
tors is used. The vector includes the follow-
ing fields in the specified order: public/private,
profit/non-profit, international, African-based,
North American-based, South American-based,
Asia-Pacific-based, European-based, national, na-
tional standardization body, ITS-domain-specific
topics, and communication-specific topics.
• p
ve
. The protocol version is an important indica-
tor of whether the same version of the standard
is being used. It should not be assumed that the
latest version of the standard is always in use, as
legacy systems may still use older versions. Addi-
tionally, the specification can be influenced by the
options and profiles of the standard. The version
may consist of a number, text, or a combination of
both.
• p
la
. Language can have an impact on the ability
of individuals to work with a specification. While
many international specifications are written in
English, some national and regional specifications
are written in the native language of the country or
region. This can create challenges for implement-
ing an interoperable solution if the specification
is not easily accessible due to language barriers.
This criterion is not directly related to interop-
erability in a strict sense but rather to the ability
of the implementer to understand and implement
the specification. Misunderstandings could poten-
tially lead to interoperability issues.
• p
s f
. The comparability of a specification may be
affected by whether it belongs to a standard family
or not. In some cases, this may result in an incom-
plete specification that requires other parts of the
specification family to be interpreted. Therefore,
it is important to thoroughly investigate the family
membership. However, a specification may still
be complete even if it is of a family. It is im-
portant to consider different options and combi-
nations. The following example pertains to two
standards. If both standards belong to the same
family, they are expected to have the same val-
ues. If both standards are from different families
or not from any standard family, the values should
be different, but the properties may be the same.
However, if only one standard is from that family
and the other is not, different values are expected.
Therefore, it is necessary to extend this value with
the name of the standard being compared. In this
manner, different families would produce unique
results, and the lack of families would also pro-
duce distinct outcomes.
• p
gv
. The validity of a specification is directly re-
lated to the geographical area and the available in-
formation and how its interpretation. While other
intentions may remain the same, the interpretation
may vary.
• p
mr
. The presence of necessary references is com-
parable to p
s f
. Including references implies that
the specification is not self-contained and needs
additional information for a full assessment and
comparison. If neither specification contains nor-
mative references, no further investigation is nec-
essary. If one or both documents cite normative
references, it indicates a need for a closer exami-
nation of the values presented.
• p
f s
. A formal specification, such as Specification
and Description Language (SDL), Message Se-
quence Charts (MSC), or Unified Modeling Lan-
guage (UML), must be used to describe a pro-
tocol precisely and without ambiguity. While a
written protocol can be open to interpretation, for-
mal languages leave no room for misunderstand-
ings. However, there may be some flexibility in
the specification of these languages for describing
the same protocol.
• cat. The protocol category indicates the protocol
type and its potential applications. The position
within the hierarchy demonstrates the relative re-
lationship between the protocols. The greater the
differences in values, the further apart the cate-
gory and intended protocols are.
• c
ps+pr
. Many protocols are designed for specific
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
230

Figure 1: Overview about the classification criteria.
use cases. They define information flow as an
exchange between two designated systems. For
instance, communication between a Traffic Man-
agement Center (TMC) and a Traffic Light Con-
troller (TLC). On the other hand, some protocols
serve a general purpose. Internet Protocol (IP)
is a protocol for any scenario where information
is communicated between independent systems.
Communication can be affected by the abilities of
the source and destination when combined. In the
case of ITS, multiple layers can be identified (re-
fer to (ETSI, 2010a)). The sender and receiver
may be situated in the same or different layers.
The values indicate the layer or layers where com-
munication is intended to take place.
• c
en+di
. The endpoints define the relationship be-
tween the transmitter and receiver in a transmis-
sion, indicating the linkage and communication
direction. This is important because some pro-
tocols operate unidirectionally, while others re-
quire two-way communication. Understanding
both values provides insight into the protocol de-
signer’s intentions.
• d
co+pu
. Sometimes protocols are specified with-
out providing context. However, including the
necessary information can aid in interpretation.
Comparing context and purpose is interesting and
indicates that more information is available.
• d
is
. Interfaces can be included in a protocol spec-
ification to specify input and output information,
primarily input. This information can come from
data flow, management, or security entities. The
presence of these interfaces provides insight into
the intended environment for the protocol.
• d
re
. External requirements can provide more in-
formation to assess the purpose and framework
conditions of the protocol.
• d
ps
. When comparing two protocols, aside from
the actual data, the behavior of the protocols is
relevant, particularly when anticipating informa-
tion transfer between two distinct protocols.
• d
pt
. If a protocol provides information through
push or pull, it can greatly affect interoperability.
If one protocol requires data to be pushed, but the
other only supplies data upon being pulled, then
interoperability is impossible.
• d
dn
. Comparing data elements can be challenging
when unclear descriptions are used. Therefore,
a clear naming pattern is crucial for comparison.
For instance, if a value is referred to as ’speed’
rather than just ’s’, it becomes easier to under-
stand. It is essential to avoid ambiguous technical
terms that hinder comprehension.
• d
du
. The importance of clearly specifying the unit
of data elements cannot be overstated. When-
ever possible, the name of the unit should
be included in the element name, such as
’speed metersPerSecond’. If the unit is not al-
ready specified, the specification should provide
clear clarification, including information about
the referencing system, such as elevation and alti-
tude.
• d
d p
. Plausibility value should be provided for val-
ues that cannot be precisely determined. For ex-
ample, a measurement error may be introduced
when obtaining a position from a Global Naviga-
tion Satellite System (GNSS) source. It is impor-
tant to communicate this information alongside
Protocol Interoperability for Intelligent Transportation Systems
231
the data so that the recipient can take it into ac-
count when interpreting the data.
• d
ds
. The criteria for determining the suitability
of a data element for functional safety are crucial
for achieving interoperability. Different protocols
exhibit different methods in this regard.
• d
do
. To assess data, the type of data provided and
its processing are critical factors.
• d
dr
. The reuse of data elements from another
specification should be considered, as it is con-
nected to the incompleteness of the specification.
• t
p+pd
. The Protocol Implementation Confor-
mance Statement (PICS) enumerates the compo-
nents of the specification. It clarifies which parts
are required, optional, or conditional, and which
are included in the context of a particular imple-
mentation.
• t
s+sd
. The test specifications provide insight into
the relevant components and the minimum func-
tionality that can be expected from any implemen-
tation.
To assess the SDO, we have established twelve
criteria presented in Table 1. Each criterion has a bi-
nary value, with only two possible outcomes: zero or
one.
Table 1: Protocol issuer classification.
Column Explanation
1 SDO is either private (0) or public (1) founded.
2 SDO is either a non-profit (0) or a profit (1) organization.
3 SDO is an international organization (1) or not (0).
4 SDO is responsible for Africa (1) or not (0).
5 SDO is responsible for North America (1) or not (0).
6 SDO is responsible for South America (1) or not (0).
7 SDO is responsible for Asia-Pacific (1) or not (0).
8 SDO is responsible for Europa (1) or not (0).
9 SDO is responsible on a national level (1) or not (0).
10 SDO is a national standardization body (1) or not (0).
11 SDO specifies ITS-domain-specific topics (1) or not (0).
12 SDO specifies communication-specific topics (1) or not (0).
To explain table 1, we provide an example be-
low. The value for the European Telecommunica-
tions Standards Institute (ETSI) is 100 000 010 011.
ETSI is a non-profit (second digit) European stan-
dardization organization authorized by the European
Commission for C-ITS (EU, 2009). It creates speci-
fications for the European Union (third digit) ans is
publicly-funded (first digit). Therefore, digits four
to seven are zero and digit eight is marked as one.
ETSI is not a national SDO and is only indirectly re-
sponsible for national specifications. Certain ETSI
documents are transferred to the national SDO via
CENELEC. Therefore, digits nine and ten are set to
zero. ETSI is responsible for communication proto-
cols specific to intelligent transportation systems, as
well as general communication protocols and appli-
cation protocols specific to intelligent transportation
systems (digits 11 and 12 set to one).
4 RESULTS
Evaluations based on the given criteria and prepa-
ration have been conducted. Table 2 shows the re-
sults of selecting four different documents to visual-
ize the approach: ETSI DENM (ETSI, 2010b), Inter-
national Organization for Standardization (ISO) Sig-
nal Request Message (SRM) (CEN, 2019), SAE Inter-
national (SAE, formerly Society of Automotive En-
gineers) Radio Technical Commission for Maritime
Services Message (RTCM) (SAE, 2016), and German
Federal Highway Research Institute (BASt) Techni-
cal guidelines for outstations (TLS) (Bundesanstalt
f
¨
ur Straßenwesen Bergisch Gladbach, 2013). This
excerpt discusses the challenges of using the classi-
fication. The specifications for DENM and TLS are
stand-alone. The remaining two cases are unique, as
they relate to a specific section of the specification.
The specification (SAE, 2016) is a collection of sev-
eral specifications, and the RTCM message is one of
those defined within it. All of these messages share
the same data header and frame format. The purpose
of the SRM is twofold: to define the application pro-
tocols, including six of SAE’s 15 protocols (four of
which are extended), and to describe the requirements
and use cases for those six protocols. The geographic
region can generally be determined by the jurisdiction
of the issuing institution.
The formal specification is provided in three of the
four specifications, with an expanded description of
the protocol’s behavior in three of the four instances.
The DENM protocol is the only protocol designed
for all communication endpoints. RTCM and DENM
are unidirectional. TLS, on the other hand, is bi-
directional (request-response). The directionality of
SRM is unclear. The message is transmitted with-
out an expected SRM message in return and instead
requires a Signal Status Message (SSM). The spec-
ifications may not always consider external require-
ments (1/4) and context (2/4), but they always include
the purpose to varying degrees of detail. The clarity
of descriptions for data elements and units may not
always be consistent, with the TLS specification us-
ing a distinct descriptive technique compared to the
other three. Finally, two of the specifications are self-
contained. One includes specific references, while the
other uses non-specific references.
Table 2 presents values that are primarily coded
for simplified automated comparison. These values
are binary-coded as a bitfield to allow for combina-
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
232

tions. The values in the table are defined upon in-
troduction, with few exceptions. The category (cat)
includes 20 distinct values. This criterion uses four
different identifiers. These include 8 for application
environmental, 16 for application mobility, 36 for ap-
plication awareness (4) and application safety (32),
and 2088 for application awareness (4) and applica-
tion mobility (16) and ITS-related facility communi-
cation (2048). The values for the sender and receiver
(c
ps+pr
) are categorized as back end (1), infrastructure
(2), pedestrian (4), vehicle (8), and other (16). Table 2
uses the following abbreviations: bac (backend), bidi
(bidirectional), ex (external), inf (infrastructure), ref
(references), spec (specific), uni (unidirectional), and
veh (vehicle).
Generative AI systems such as OpenAI ChatGPT,
Mircosoft Copilot, and Google Gemini can be utilized
to expedite the process. They can provide an overview
based on the given criteria for preliminary assess-
ment. Table 3 illustrates the combined feedback pro-
vided by the three AI systems for comparing the Co-
operative Awareness Message (CAM) (ETSI, 2019)
specification of ETSI and the Basic Safety Message
(BSM) (SAE, 2016) specification of SAE. The query
(’Compare the specifications of ETSI CAM and SAE
BSM based on the following criteria and show the re-
sult in a table. The criteria are protocol issuer, pro-
tocol version, protocol language, belongs to a stan-
dard family, geographical area the protocol is valid,
contains normative references, includes formal spec-
ification, defines specific sender and receiver, defines
communication endpoints, provides context and pur-
pose, includes interface description includes require-
ments, is a stateful or stateless protocol, push or pulls
information, conforms to data naming convention, in-
cludes plausibility values for data, includes informa-
tion for functional safety, resues data types, includes
PICS, includes test specification.’) was asked three
times for every AI system.
5 DISCUSSION
Table 2 provides guidance for developers on trans-
ferring information between specifications. For in-
stance, consider DENM information and TLS tele-
grams. These specifications differ significantly in
their approach and fall into separate categories (cat)
of ITS protocols, namely application safety (DENM)
and transport communication (TLS). Additionally,
they are written in different languages (p
la
). This is
not a technical interoperability issue, but rather a hu-
man one. To understand the details of a specification
and implement data interoperability correctly, devel-
opers must grasp its meaning.
It is worth noting that DENM is a stateless pro-
tocol, while TLS is stateful (d
ps
). The impact of this
difference depends on the specific situation in which
both protocols are used. If only data is being trans-
ferred from one protocol to another, the state may not
be relevant. However, if an application is waiting to
receive data via TLS and DENM is not providing this
data, it could cause the application to stall until the
data arrives. If an application includes both protocols,
it may face the challenge of information asymmetry,
where information is requestable via TLS but not via
DENM. This could lead to situations where applica-
tions do not possess all the information necessary to
evaluate a situation.
TLS does not have any formal specifications, but
it includes some behavioral aspects (p
f s
) related to
the protocol states. The data definitions differ be-
tween TLS and DENM’s specifications. TLS uses
only numbered fields with explanations for data el-
ement naming (d
dn
), while DENM’s specification de-
pends on other data definition specifications (ETSI
Common Data Dictionary (ETSI, 2023)). TLS’s data
definition is complete in this regard (d
ds
). Only cer-
tain parts of the information can be transmitted due to
the significant differences in the data elements. Fur-
thermore, while both TLS and DENM contain infor-
mation about data plausibility, they are not compat-
ible upon closer inspection. DENM has extensive
test specifications available, whereas TLS does not
(t
p+pd
).
Table 3 presents the combined results of three AI
systems: OpenAI ChatGPT, Microsoft Copilot, and
Google Gemini of ETSI CAM and SAE BSM. None
of the systems produced a comprehensive result, and
they even contradicted each other on aspects such as
geographical area and testing capabilities. Often, the
correct specification, EN 302 637-2 for CAM, was
not identified, and instead, DENM EN 302 637-3 was
mentioned. At times, even in versions such as 2.2.1,
which does not exist yet. The J2945-1A specifica-
tion is mentioned regularly for SAE instead of J2735,
which is the test specification for J2735. Prior knowl-
edge of the protocols is necessary to understand and
process the results at the current development state.
It is important to note that the results may vary when
two equal requests are made to the same AI system.
The criteria can be applied to a wide range of sit-
uations. If a simple comparison of communication
is required, only certain values should be used, such
as the data values d
dn
, d
do
, and d
du
, the states d
ps
,
and the communications paradigm d
pt
. The commu-
nication and protocol categories criteria can be used
to establish primary compatibility. When conducting
Protocol Interoperability for Intelligent Transportation Systems
233
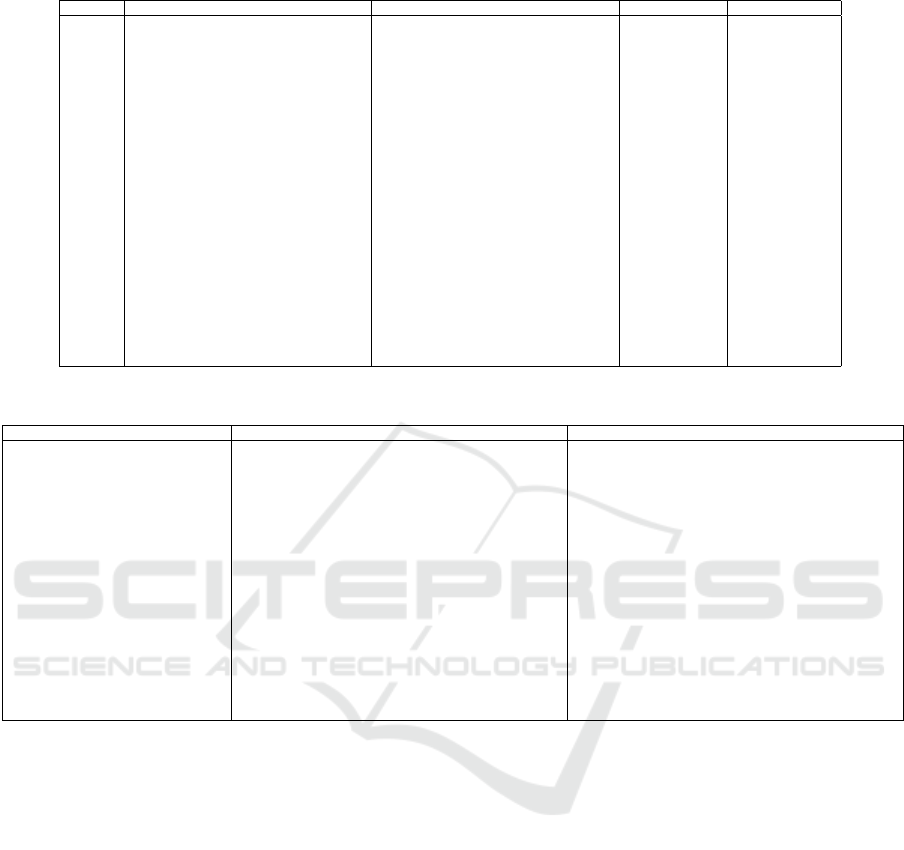
Table 2: Classification example.
Criteria DENM SRM ISO RTCM SAE TLS
p
is+ik
100 000 010 011 010 000 000 111 011 010 000 011 100 000 001 011
p
ve
Version 1.3.1 2019 Jul 2020 2012
p
la
English English English German
p
s f
4 (alone) 2 (part) 2 4
p
gv
2 (Europe) 2 (America, Japan, Europe) 0 4 (National)
p
mr
1 (8 ref) 1 (15 ref) 1 (15 ref) 1 (25 ref)
p
f s
1 + behavior 1 + behavior 1 0 + behavior
cat 36 16 8 2068
c
ps+pr
15 + 15 2 (inf) + 8 (veh) 2 + 12 (mainly) 1 (bac) + 2
c
en
63 (all) 8 (f-p) 2 (c-p) 1 (c-f)
c
di
1 (uni) 1 or 2 (bidi, with SSM) 1 2
d
co
2 (no) 1 (yes) 2 1
d
pu
1 (yes) 1 1 (short) 1
d
is
1 (yes) 2 (no) 2 2
d
re
2 (no) 1 (yes) some extend 2 2
d
ps
2 (stateless) 2 (1 with SSM) 2 1 (stateful)
d
pt
1 (push) 1 1 4 (both)
d
dn
1 (self) 4 (partly) 1 16 (not applicable)
d
du
1 (yes, ex) 8 (partly) 1 (yes) 8
d
d p
4 (some) 4 4 4
d
ds
4 (some) 2 (no) 2 2
d
do
8 (undefined) 8 8 8
d
dr
1 (yes, spec) 2 (yes, non-spec) 0 (no) 0
t
p+pd
2 (yes, ex) + (ETSI, 2020a) 2 (yes, ex) + (ETSI, 2021a) 0 (not applicable) 2 (no)
t
s+sd
2 (yes, ex) + (ETSI, 2020b) and (ETSI, 2020c) 2 (yes, ex) + (ETSI, 2021b) and (ETSI, 2021c) 2 (no) 1 (yes, part)
Table 3: Comparison of ETSI CAM and SAE BSM.
Criteria ETSI CAM (EN 302 637-2) SAE BSM (J2735)
Protocol Issuer ETSI SAE International
Protocol Version EN 302 637-2 V1.4.1 (2019) J2735 (July 2020)
Protocol Language English English
Belongs to a Standard Family ETSI ITS V2X communications
Geographical Area Validity European Union Primarily North America
Contains Normative References Yes, lists multiple ISO, ETSI, and IEEE standards Yes, lists multiple SAE and IEEE standards
Includes Formal Specification Yes, uses ASN.1 for data encoding and message structure Yes, uses ASN.1 for data encoding and message structure
Defines Specific Sender and Receiver Yes Yes, sender is an OBSE and receiver is any DSRC station
Defines Communication Endpoints Yes, uses DSRC ITS-G5 communication channels Yes, uses DSRC ITS-G5 communication channels
Provides Context and Purpose Cooperative awareness Safety communications
Includes Interface Description Yes, specifies message structure and encoding rules Yes, specifies message structure and encoding rules
Includes requirements Yes, specifies requirements for message content and transmission Yes, specifies requirements for message content and transmission
Stateful or Stateless protocol Stateless Stateless
Push or Pulls Information Push (broadcast-based) Push
Conforms to Data Naming Convention Yes, uses defined ASN.1 data types and names Yes, uses defined ASN.1 data types and names
Includes Plausibility Values for Data Not specified Not specified
Includes Information for Functional Safety Not specified Not specified
Reuses Data Types Yes Yes
Includes PICS Yes Yes
Includes Test Specification Yes Yes
protocol testing, the criteria can be used to determine
the defined test procedures and their compatibility.
The findings offer guidance to developers and sys-
tem architects, providing insight into critical fields for
the system, application, or use case.
6 CONCLUSION AND FUTURE
WORK
We proposed a mechanism for evaluating the infor-
mal part of ITS specifications. The proposed cate-
gories provide a comprehensive summary of the spec-
ifications and allow for comparison between various
specifications. This knowledge enables the identifica-
tion of potential interoperability issues before finaliz-
ing system or application design and implementation.
Although these measures do not replace integration
and interoperability testing, they provide a means to
make design choices, reducing problems early on in
the creation process. The defined categories can be
customized to serve specific objectives, either inde-
pendently or as a subset.
Weights can be added to values to emphasize spe-
cific needs. This flexible approach allows for adap-
tation to varied settings and requirements. However,
precise interpretation of specifications is vital, espe-
cially due to imprecise terminology that can lead to
identical concepts being described differently. Gener-
ative AI systems can provide an initial overview, but
they are currently unreliable in extracting the required
information from specifications. Additionally, they
cannot access specifications that are behind a paywall.
Even though the TLS (Bundesanstalt f
¨
ur Straßenwe-
sen Bergisch Gladbach, 2013) specification is freely
available, none of the three systems were able to ac-
cess it. Therefore, a specialized evaluation system
should be developed to meet the unique needs of the
evaluation process.
The next step is to fully automate the analysis
of formal specification sections, including compar-
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
234

ing data definitions in ASN.1 or UML. The purpose
of this analysis is to identify corresponding or seem-
ingly corresponding data fields and address the issue
of word ambiguity, such as the difference between
speed and velocity or elevation and altitude. Subse-
quently, we will evaluate the linkage between ecosys-
tems, architectures, and protocols.
ACKNOWLEDGEMENTS
This work was funded by the German projects
ConnRAD (grant number 16KISR032) and Gaia-
X4MoveID (grant number 19S22002L).
REFERENCES
Bouloukakis, G., Georgantas, N., Ntumba, P., and Is-
sarny, V. (2019). Automated synthesis of mediators
for middleware-layer protocol interoperability in the
IoT. Future Generation Computer Systems, 101(ISSN
0167-739X):1271–1294.
Bromberg, Y.-D., Grace, P., and R
´
eveill
`
ere, L. (2011).
Starlink: Runtime Interoperability between Heteroge-
neous Middleware Protocols. In 2011 31st Interna-
tional Conference on Distributed Computing Systems,
pages 446–455.
Bundesanstalt f
¨
ur Straßenwesen Bergisch Gladbach (2013).
Technische Lieferbedingungen f
¨
ur Streckenstationen.
Standard, Bundesministerium f
¨
ur Verkehr, Bau und
Stadtentwicklung, Berlin.
Cavalieri, S. (2021). A Proposal to Improve Interoperability
in the Industry 4.0 Based on the Open Platform Com-
munications Unified Architecture Standard. Comput-
ers, 10(6).
CEN (2019). CEN/ISO TS 19091: Intelligent transport
systems - Cooperative ITS - Using V2I and I2V
communications for applications related to signal-
ized intersections. Technical specification, European
Committee for Standardization; Technical committees
ISO/TC 204 - Intelligent Transport Systems, Brussels.
CEN (2024). Cen technical committee (tc) 278 its stan-
dardization website. https://www.itsstandards.eu/.
Accessed: 2024-02-18.
Cruz-S’nchez, H., Havet, L., Chehaider, M., and Song,
Y. (2012). MPIGate: A Solution to Use Heteroge-
neous Networks for Assisted Living Applications. In
2012 9th International Conference on Ubiquitous In-
telligence and Computing and 9th International Con-
ference on Autonomic and Trusted Computing, pages
104–111.
Derhamy, H., R
¨
onnholm, J., Delsing, J., Eliasson, J., and
van Deventer, J. (2017). Protocol interoperability of
OPC UA in service oriented architectures. In 2017
IEEE 15th International Conference on Industrial In-
formatics (INDIN), pages 44–50.
Djalalov, M. (2013). The role of intelligent transportation
systems in developing countries and importance of
standardization. In 2013 Proceedings of ITU Kaleido-
scope: Building Sustainable Communities, pages 1–7,
Kyoto, Japan.
Ernst, T. (2021). Standards for cooperative intelligent trans-
port systems (c-its). In Bensrhair, A. and Bapin, T.,
editors, From AI to Autonomous and Connected Vehi-
cles. John Wiley & Sons, Ltd, London.
ETSI (2010a). EN 302 665: Intelligent Transport Systems
(ITS); Intelligent Transport Systems (ITS); Commu-
nications Architecture. European standard, European
Telecommunications Standards Institute; Intelligent
Transportation System, Technical Committee, Sophia
Antipolis Cedex.
ETSI (2010b). TS 102 636-3: Intelligent Transport Systems
(ITS); Vehicular Communications; GeoNetworking;
Part 3: Network architecture. Technical specifi-
cation, European Telecommunications Standards In-
stitute; Intelligent Transportation System, Technical
Committee, Sophia Antipolis Cedex.
ETSI (2019). EN 302 637-2: Intelligent Transport Sys-
tems (ITS); Vehicular Communications; Basic Set of
Applications; Part 2: Specification of Cooperative
Awareness Basic Service. European standard, Euro-
pean Telecommunications Standards Institute; Intel-
ligent Transportation System, Technical Committee,
Sophia Antipolis Cedex, France.
ETSI (2020a). TS 102 869-1: Intelligent Transport Systems
(ITS); Testing; Conformance test specifications for
Decentralized Environmental Notification Basic Ser-
vice (DEN); Part 1: Test requirements and Protocol
Implementation Conformance Statement (PICS) pro
forma. Technical specification, European Telecom-
munications Standards Institute; Intelligent Trans-
portation System, Technical Committee, Sophia An-
tipolis Cedex.
ETSI (2020b). TS 102 869-2: Intelligent Transport Sys-
tems (ITS); Testing; Conformance test specifications
for Decentralized Environmental Notification Basic
Service (DEN)); Part 2: Test Suite Structure and Test
Purposes (TSS and TP). Technical specification, Eu-
ropean Telecommunications Standards Institute; Intel-
ligent Transportation System, Technical Committee,
Sophia Antipolis Cedex.
ETSI (2020c). TS 102 869-3: Intelligent Transport Sys-
tems (ITS); Testing; Conformance test specifications
for Decentralized Environmental Notification Basic
Service (DEN); Part 3: Abstract Test Suite (ATS)
and Protocol Implementation eXtra Information for
Testing (PIXIT). Technical specification, European
Telecommunications Standards Institute; Intelligent
Transportation System, Technical Committee, Sophia
Antipolis Cedex.
ETSI (2021a). TS 103 191-1: Intelligent Transport Sys-
tems (ITS); Testing; Conformance test specifications
for Facilities layer protocols and communication re-
quirements for infrastructure services; Part 1: Test
requirements and Protocol Implementation Confor-
mance Statement (PICS) pro forma. Technical speci-
fication, European Telecommunications Standards In-
Protocol Interoperability for Intelligent Transportation Systems
235

stitute; Intelligent Transportation System, Technical
Committee, Sophia Antipolis Cedex.
ETSI (2021b). TS 103 191-2: Intelligent Transport
Systems (ITS); Testing; Conformance test specifi-
cations for Facilities layer protocols and communi-
cation requirements for infrastructure services; Part
2: Test Suite Structure and Test Purposes (TSS and
TP). Technical specification, European Telecommu-
nications Standards Institute; Intelligent Transporta-
tion System, Technical Committee, Sophia Antipolis
Cedex.
ETSI (2021c). TS 103 191-3: Intelligent Transport Systems
(ITS); Testing; Conformance test specifications for
Facilities layer protocols and communication require-
ments for infrastructure services; Part 3: Abstract
Test Suite (ATS) and Protocol Implementation eXtra
Information for Testing (PIXIT). Technical specifi-
cation, European Telecommunications Standards In-
stitute; Intelligent Transportation System, Technical
Committee, Sophia Antipolis Cedex.
ETSI (2023). ETSI TS 102 894-2: Intelligent Transport
Systems (ITS); Users and applications requirements;
Part 2: Applications and facilities layer common data
dictionary; Release 2. Technical specification, Euro-
pean Telecommunications Standards Institute; Intel-
ligent Transportation System, Technical Committee,
Sophia Antipolis Cedex.
ETSI (2024). Etsi standards overview. https://www.etsi.org
/standards. Accessed: 2024-02-18.
EU (2009). M/453 EN: Standardisation mandate addressed
to CEN, CENELEC and ETSI in the field of infor-
mation and communication technologies to support
the interoperability of co-operative systems for intel-
ligent transport in the European community. Eu man-
date, European Commission: Enterprise and Industry
Directorate-General, Brussels.
Feng, Y., He, D., Niu, L., Yang, M., and Guan, Y. (2017).
The overview of chinese cooperative intelligent trans-
portation system vehicular communication applica-
tion layer specification and data exchange standard.
In Information Technology and Intelligent Transporta-
tion Systems - Proceedings of the 2nd International
Conference on Information Technology and Intelligent
Transportation Systems (ITITS), volume 296 of Fron-
tiers in Artificial Intelligence and Applications, pages
516–526, Xi’an, China. IOS Press.
Festag, A. (2014). Cooperative intelligent transport systems
standards in europe. IEEE Communications Maga-
zine, 52(12):166–172.
Festag, A. and Hess, S. (2009). Etsi technical commit-
tee its: news from european standardization for in-
telligent transport systems (its)- [global communica-
tions newsletter]. IEEE Communications Magazine,
47(6):1–4.
Hamida, E. B., Noura, H., and Znaidi, W. (2015). Secu-
rity of cooperative intelligent transport systems: Stan-
dards, threats analysis and cryptographic countermea-
sures. Electronics, 4(3):380–423.
ISO (2024). Iso technical committee (tc) 204. https://www.
iso.org/committee/54706.html. Accessed: 2024-02-
18.
ITU (2024). Itu its specification overview. https://www.itu.
int/itu-t/landscape/. Accessed: 2024-02-18.
Khodaei, M. and Papadimitratos, P. (2015). The key to in-
telligent transportation: Identity and credential man-
agement in vehicular communication systems. IEEE
Vehicular Technology Magazine, 10(4):63–69.
Kosch, T., Kulp, I., Bechler, M., Strassberger, M., Weyl, B.,
and Lasowski, R. (2009). Communication architec-
ture for cooperative systems in europe. IEEE Commu-
nications Magazine, 47(5):116–125.
Lim, S. (2012). Korean its standardization. In 2012 7th
International Conference on Computing and Conver-
gence Technology (ICCCT), pages 1235–1238, Seoul.
Lonc, B. and Cincilla, P. (2016). Cooperative ITS security
framework: Standards and implementations progress
in Europe. In 2016 IEEE 17th International Sympo-
sium on A World of Wireless, Mobile and Multimedia
Networks (WoWMoM), pages 1–6.
Lu, M., Blokpoel, R., F
¨
unfrocken, M., and Castells, J.
(2018). Open architecture for internet-based c-its ser-
vices. In 2018 21st International Conference on In-
telligent Transportation Systems (ITSC), pages 7–13,
Maui.
Macioszek, E. (2014). Architecture of intelligent trans-
portation systems in the world and in poland. Archives
of Transport System Telematics, Vol. 7, iss. 3:22–26.
Mariani, R., Maor, N., Athavale, J., and Gay, K. (2021).
The importance of interoperability in functional safety
standards. Computer, 54(3):80–84.
Nakazawa, J., Tokuda, H., Edwards, W. K., and Ramachan-
dran, U. (2006). A Bridging Framework for Universal
Interoperability in Pervasive Systems. In 26th IEEE
International Conference on Distributed Computing
Systems (ICDCS’06), pages 3–3.
Nsonga, P. and Ustun, T. S. (2016). Integration of com-
munication standards in electrical vehicle ad-hoc net-
works for smartgrid support. In 2016 IEEE Interna-
tional Conference on Emerging Technologies and In-
novative Business Practices for the Transformation of
Societies (EmergiTech), pages 106–111, Balaclava.
Padmadas, M., Nallaperumal, K., Mualidharan, V., and
Ravikumar, P. (2010). A deployable architecture of in-
telligent transportation system — a developing coun-
try perspective. In 2010 IEEE International Confer-
ence on Computational Intelligence and Computing
Research, pages 1–6, Coimbatore.
Park, H., Lee, H., Park, S., and Lee, D. H. (2009). Devel-
oping a Multi-Protocol Mobility Manager for SIP/SS7
Networks. In 2009 International Conference on Com-
plex, Intelligent and Software Intensive Systems, pages
565–570.
P
ˇ
ribyl, P., Janota, A., Spalek, J., and Faltus, V. (2021).
Knowledge System Supporting ITS Deployment. Sus-
tainability, 13(11).
Ren, J.-T., Zhang, Y., heng Li, Z., and cheng Hu, D. (2001).
An architecture for its information application sys-
tems. In ITSC 2001. 2001 IEEE Intelligent Trans-
portation Systems. Proceedings (Cat. No.01TH8585),
pages 994–999, Oakland.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
236

SAE (2016). SAE J2735: Dedicated Short Range Commu-
nications (DSRC) Message Set Dictionary. Standard,
Society of Automotive Engineers (SAE); DSRC com-
mittee, Warrendale.
Sousa, S., Santos, A., Costa, A., Dias, B., Ribeiro, B.,
Gonc¸alves, F., Macedo, J., Nicolau, M. J., and
´
Oscar
Gama (2017). A new approach on communications ar-
chitectures for intelligent transportation systems. Pro-
cedia Computer Science, 110(ISSN 1877-0509):320–
327. 14th International Conference on Mobile Sys-
tems and Pervasive Computing (MobiSPC 2017) /
12th International Conference on Future Networks
and Communications (FNC 2017) / Affiliated Work-
shops.
St
¨
ubing, H., Bechler, M., Heussner, D., May, T., Radusch,
I., Rechner, H., and Vogel, P. (2010). simtd: a car-to-
x system architecture for field operational tests [top-
ics in automotive networking]. IEEE Communications
Magazine, 48(5):148–154.
Sugimoto, T. (1999). Current status of its and
its international cooperation. In Proceedings of
the IEEE International Vehicle Electronics Confer-
ence (IVEC’99) (Cat. No.99EX257), pages 503–507
Suppl., Changchun.
Williams, B. (2008). Intelligent Transport Systems Stan-
dards. Artech House, London, 2nd edition.
Yacchirema, D. C., Palau, C. E., and Esteve, M. (2017).
Enable IoT interoperability in ambient assisted liv-
ing: Active and healthy aging scenarios. In 2017 14th
IEEE Annual Consumer Communications Networking
Conference (CCNC), pages 53–58.
Zeadally, S., Javed, M. A., and Hamida, E. B. (2020). Ve-
hicular communications for its: Standardization and
challenges. IEEE Communications Standards Maga-
zine, 4(1):11–17.
Protocol Interoperability for Intelligent Transportation Systems
237
