
Humour in Educational Robots: Investigating the Effects of Humour
in a Robot-Led Scrumban Simulation in Business Education
Ilona Buchem
a
, Niklas Bäcker
b
, Ayline Trutty
c
, Emily Thomas
d
and Kerim Dincel
e
Communications Lab, Berlin University of Applied Sciences, Luxemburger Str. 10, Berlin, Germany
Keywords: Educational Robots, Social Robots, Humour, Teaching Strategies, Daily Scrum, Business Education.
Abstract: Educational robots have been used as technologies to support social interactions with learners and enhance
both cognitive and affective learning outcomes. While studies have shown positive impact of humour both in
education and human-robot interaction, little is known about the impact of humour enacted by educational
robots. This paper presents a between-subjects, randomized study, that explored the effects of humour on the
perception of the robot competence and facilitation, as well as learning experience, and outcomes of 30
undergraduate students during a Scrumban simulation with the robot NAO in business education settings. The
humorous version was programmed using positive humour with selected jokes and witty remarks generated
by ChatGPT. The results of statistical analysis showed a range of differences in the perception of the robotic
facilitator, the learning experience, and the learning outcomes in the humorous compared to the neutral
condition. The results of the study provide preliminary evidence on the effects of humour in educational
robots. While this study demonstrates the potential of “humoroids" and the participants favoured robot-
enacted humour as a means to create a more enjoyable and relaxed learning environment, the generalisability
of the results is limited by the absence of statistically significant findings.
1 INTRODUCTION
Educational robotics and robots have been used in
computer-supported education since the early 1980s.
Traditionally, educational robotics (ER), including
programmable toys such as Bee-bots and platforms
such as LEGO® Mindstorms®, have been applied in
STEM education to foster mathematical,
computational, and engineering skills, problem-
solving and teamwork (Gubenko et al., 2021). A
systematic review of studies on ER is provided by
Anwar et al. (2019). Recently, there has been a shift
in the application of ER, moving beyond their
traditional use in STEM to actively support learning
through meaningful social interactions with learners
(Belpaeme, et al. 2018). Social robots like NAO can
perceive, listen, and communicate in a manner
reminiscent of human interactions. Social robots'
educational potential lies in their physical presence,
a
https://orcid.org/0000-0002-9189-7217
b
https://orcid.org/0000-0001-6920-7139
c
https://orcid.org/0009-0009-7242-3380
d
https://orcid.org/0009-0008-0789-0540
e
https://orcid.org/0009-0000-6216-5060
friendly appearance, and multimodal interface
design, enabling human-like communication via
speech, gestures, eye gaze, and touch (Belpaeme, et
al. 2018; OECD, 2021; Buchem & Baecker, 2022).
Social robots have been applied to support educators
as instructors, tutors, or assistants who are able to
engage learners in more human-like ways compared to
other educational technologies (OECD, 2021).
Numerous studies have indicated that social robots can
effectively enhance the overall educational experience
as well as cognitive and affective learning outcomes,
often comparable to human instructors (Belpaeme, et
al. 2018). Despite a surge in research in ER in recent
years, studies examining the impact of humour in
social robots on the learning experience and the
achievement of learning outcomes, remain scarce.
Our study investigates how robot-enacted humour
influences students' perceptions of robotic
facilitation, learning experience, and outcomes. Our
314
Buchem, I., Bäcker, N., Trutty, A., Thomas, E. and Dincel, K.
Humour in Educational Robots: Investigating the Effects of Humour in a Robot-Led Scrumban Simulation in Business Education.
DOI: 10.5220/0012557400003693
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Computer Supported Education (CSEDU 2024) - Volume 1, pages 314-321
ISBN: 978-989-758-697-2; ISSN: 2184-5026
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

research extends our prior studies, where we
employed NAO as a facilitator to support students in
acquiring skills related to agile practices through
playful, hands-on learning experiences (Buchem &
Baecker, 2022; Buchem, Christiansen & Glißmann-
Hochstein, 2023). The study presented in this paper
applied NAO as a facilitator of a Scrumban session.
The research question was: How will the use of
humour by an educational robot affect students’
perceptions of the robotic facilitator and robot-led
facilitation, as well as students’ learning experience,
and learning outcomes?
Our primary hypothesis was that the use of robot-
enacted humour would result in higher ratings of the
robotic facilitator’s competence, the quality of the
robotic facilitation and the learning experience
compared to the neutral condition. Our secondary
hypothesis was that the use of robot-enacted humour
would result in lower ratings of learning outcomes
compared to the neutral condition, which may be
perceived as more serious and/or less distracting, and
thus more appropriate for educational settings.
This paper is structured as follows. After this
introduction, we delve into related work focusing on
humour in education and human-robot interaction
(HRI). Then we detail our study design and scales
employed in the study. After that we present study
results and end with a discussion and conclusions.
2 RELATED WORK
Humour is a human communication tool, which is
often used to evoke positive reactions (Lynch, 2002).
Conversational humour is a complex multifaceted
construct, which includes jokes (statements with a
punch-line), puns (wordplay with multiple
meanings), sarcasm (sharp statements with a
humorous undertone), anecdotes (humorous stories),
and witticisms (clever, amusing remarks) (Dynel,
2009). Humour is related to non-verbal behaviours
such as laughter (Bechade et al., 2016), and includes
cognitive processes, while laughter is triggered by
humorous stimuli (Mirnig et al., 2016). Research in
cognitive psychology shows that comprehension and
appreciation of humour require cognitive effort (Suls,
1983), and are linked to higher cognitive and
emotional intelligence (Johanson et al., 2020).
Studies have shown that different types of humour
may influence outcomes. Samson & Gross (2012)
showed that positive (but not negative) humour is an
effective form of emotion regulation. Mirnig et al.
(2016) compared the use of self-irony and
Schadenfreude (as an experience of satisfaction
derived from the misfortune of others), as two types
of robot-enacted humour and found out that
participants significantly preferred robot-enacted
self-irony over Schadenfreude. Gorham &
Christophel (1990) showed that the amount and type
of humour influence learning, such that personal and
general anecdotes are related to positive attitudes
towards a teacher, while tendentious (sarcastic)
humour tends to diminish affect. Stoll, Jung & Fussell
(2018) compared a human and a robot conflict
mediators and showed that while affiliative humour
(which implies equality), and aggressive humour
(which implies superiority), was perceived as more
appropriate for a human, self-defeating or self-
deprecating humour (which implies inferiority) was
rated as more appropriate for a robot, implying a
favourable human-robot hierarchy. Our study applied
positive type of humour (see Section 3.1).
2.1 Humour in Education
Humour is an important tool for conveying
information and an excellent entry point in the
classroom (Mora, Weaver & Lindo, 2015). Applying
humour in education has both cognitive-affective and
pedagogical effects (Musiichuk, Gnevek &
Musiichuk, 2018). Humour can be used as a tool to
encourage attention, creativity, and critical thinking,
create a relaxed learning environment, and support
social interactions among students (Mora, Weaver &
Lindo, 2015). Teacher humour is associated with
being amusing and making students laugh, e.g. by
using funny words, actions, or reactions, while
interacting with students, managing a classroom, and
setting a tone for learning activities (Lovorn &
Holaway, 2015). Although humour tends to improve
students' perceptions of teacher's competence,
intelligence, and friendliness, empirical evidence of
its impact on learning remains inconclusive (Gorham
& Christophel, 1990). Lovorn & Holaway (2015)
showed that while teachers associate humour with
educational benefits, they do not deliberately include
humour, but rather rely on impromptu strategies in
the classroom. The appreciation of humour combined
with reluctance and discomfort in using it (Morrison,
2008), was called a “humour paradox in education”
(Lovorn & Holaway, 2015).
2.2 Humour in HRI
Conversational agents equipped with humour have
been called “humouroids” (Dybala et al., 2009).
Research exploring the impact of humour in robots as
conversational agents is still scarce (Johanson et al.,
Humour in Educational Robots: Investigating the Effects of Humour in a Robot-Led Scrumban Simulation in Business Education
315

2020). A social robot can use humour to engage or
interact with students by using jokes and witty
comments to evoke positive reactions and make itself
more likeable and approachable (Lovorn & Holaway,
2015). Niculescu et al. (2013) explored how humour
influenced the quality of interaction with a social
robot receptionist and found that it improved the
perception of task enjoyment and robot personality.
Stoll, Jung & Fussell (2018) showed that self-
defeating humour in robots in simulated conflict
situations created a favourable human-robot
hierarchy with the robot in an inferior position.
Research shows that making humanoid robots act
emotionally, helps to make humans feel more
comfortable. For example, when a robot expresses
human-like emotions, such as surprise, agreement,
sympathy, and approval, humans tend to nod and
smile (Li et al., 2017). Omokawa et al. (2019) found
that phatic dialogues of social robots, intended to
support social relationships, elicit laughter and smiles
from participants, compared to query dialogues
aimed at conveying specific information. The study
by Johanson et al. (2020) on the use of humour by a
healthcare robot found that the use of humour resulted
in significantly higher perceptions of the robot’s
likeability, safety, empathy, and sociability, and that
significantly more participants laughed during an
interaction with a “humouroid”. Research also
indicates that humour may be more effective for non-
task-oriented agents, e.g. with focus on entertainment
(Dybala et al., 2009).
Our study applied a social robot as a task-oriented
agent, who facilitated a Scrumban session, thus
leaving some uncertainty about how the use of
humour may impact the learning experience.
3 STUDY DESIGN
The study design draws on our past studies with NAO
applied as a facilitator of agile practices such as Daily
Scrum (Buchem & Baecker, 2022) and Planning
Poker (Buchem, Christiansen, & Glißmann-
Hochstein, 2023). This study was designed as a
Scrumban session, and was part of the agile project
management course in the undergraduate program in
Digital Business (BSc.). In this course, students learn
agile practices, such as Scrum, Kanban, and
Scrumban. The Scrumban session aimed to provide
students with a hands-on experience of a daily stand-
up meeting combined with the use of a Kanban board
to visualise a workflow (Petricioli & Fertalj, 2022).
Scrumban is a versatile and hybrid agile
methodology, which allows for larger team sizes
compared to Scrum (Alqudah & Razali, 2018). The
Scrumban session included two roles played by
students: (a) team member, and (b) agile coach.
Students in the role of team members (10 students per
condition) directly engaged in the daily standup
meeting with a Kanban board. Students in the role of
agile coaches (5 students per condition) observed the
session and provided feedback to team members after
the session. The team size of 10 with 5 agile coaches
allowed us to create a hands-on experience for the
cohort of 30 students (15 students per condition).
The study design included the preparation of
didactic materials for a semi-scripted role-pay in the
Scrumban session: (a) a script for team members with
three daily scrum questions and answers, and (b) an
observation template for agile coaches with points
related to workflow improvements. These materials
aimed to alleviate cognitive workload (Gittens, 2021)
associated with a novel situation of a Scrumban
simulation with a robot and in English (foreign
language), allowing students to focus on methods and
procedures of Scrumban.
3.1 Design of Robot-Enacted Humour
Drawing from research on humour in education and
HRI, we designed a humorous version of the
Scrumban session with NAO, incorporating two
types of conversational humour: short jokes and witty
remarks, following Dynel's (2009) classification. The
study was conducted with business students in
Germany. Considering that English was not their
native language, we opted to exclude three other types
of humour from Dynel's (2009) classification: puns,
sarcasm, and anecdotes, as too challenging for non-
native speakers.
We used ChatGPT 3.5 to generate short jokes and
witty remarks for the humorous version. From the
pool of 20 ChatGPT-generated responses we selected
six jokes (e.g. “Ok team, let me ask you a question:
Why do Scrum teams love the beach? Because they
can always count on a good stand-up!”) and six witty
remarks (e.g. "So, team, let's channel our inner Usain
Bolt and sprint through these updates. Keep your
energy and remember we are running a quick
sprint!”). Additionally, we used funny motivational
prompts (e.g. “You go rockstar!”), which place
students in a superior position, possibly creating a
favourable hierarchy (Stoll, Jung & Fussell, 2018).
3.2 Application Design
The Scrumban application for NAO Power V6
Educator Pack was written in Python and designed
CSEDU 2024 - 16th International Conference on Computer Supported Education
316
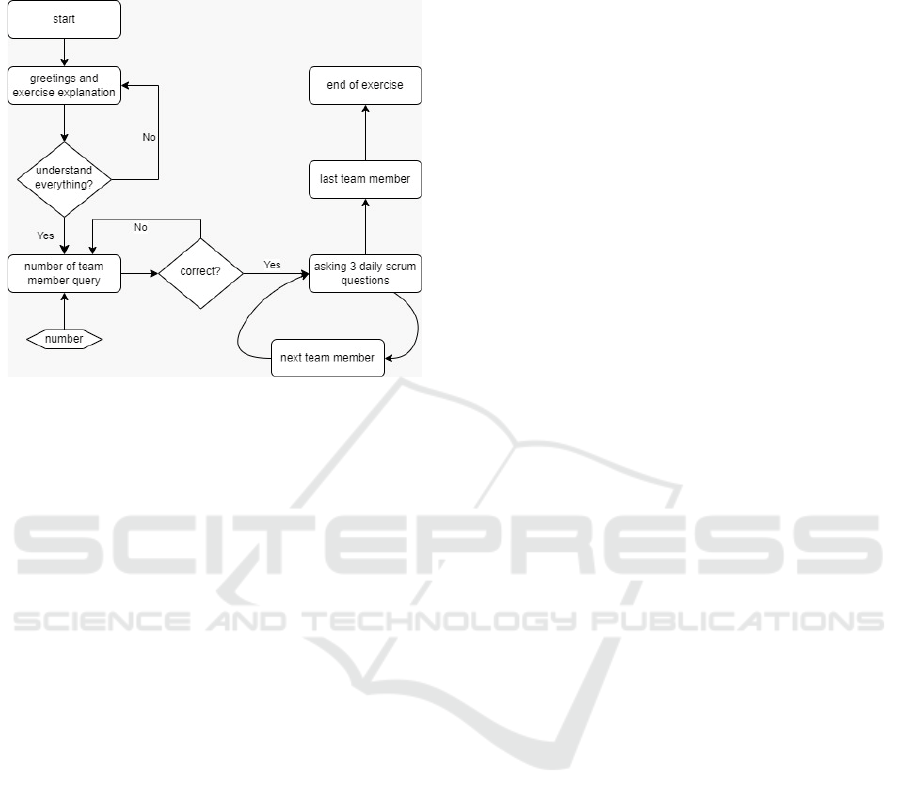
using Choregraphe software Version 2.8.6. The
general flow used both in the neutral and the
humorous versions is shown in Figure 1.
Figure 1: Flow diagram of the Scrumban application.
The interaction with the robot included verbal
communication through speech and non-verbal
interaction through tactile sensors positioned at the
tip of each foot and on the head of the robot. We used
the "Switch Case" box in Choregraphe to record the
number of team members. This box is a programming
module used to control the flow of the robot's
behavior based on different conditions. In our
application, Switch Case receives a number between
1 and 10 as a signal captured via speech recognition.
The loop of the three questions of the daily scrum was
implemented by combining the Counter box and the
Switch Case box. The Counter box counts up a
variable according to the team members and the
Switch Case box controls the individual loops.
3.3 Experimental Setup
Our study aimed to investigate whether the use of
humour by an education robot NAO would affect the
perception of the robotic facilitator and facilitation,
the learning experience, and the learning outcomes. A
between-subjects, randomized design was chosen to
compare possible effects. All participants signed a
written consent before the study. The study was
conducted at Berlin University of Applied Sciences
in Germany. The study participants were 30
undergraduate students, 56.67% female (17) and
43.33% male (13). The age distribution was 10%
under 20 (3), 69% 20 to 24 (20), 20.7% 25 to 29 (6),
and 3.4% 30 to 34 (1) years old. 93.33% of the
participants (28) had prioe experience in with NAO.
The participants were divided into two groups:
(N) Neutral and (H) Humorous. Each group
comprised of 10 students playing the role of team
members and 5 students playing the role of agile
coaches, resulting in a total of 30 study participants.
Students convened with the teacher and the project
team (authors of the paper) in a seminar room. The
lead researcher (teacher), elucidated the purpose of
the Scrumban simulation, outlined the 90-minute
procedure of the session, obtained written informed
consent, addressed inquiries, randomly assigned
students to either the N or H condition, distributed a
script to each team member, provided an observation
template to each agile coach, and tasked students with
preparing their Kanban cards using post-its.
After this preparation phase, the groups split into
two different rooms, in which two parallel Scrumban
sessions took place, each with a different NAO. Both
groups were supported by two project members: (a)
one operator (ensuring technical implementation on
NAO), and (b) one assistant (helping participants
with any issues).
In each condition, the Scrumban session was
conduced following the same pattern with students
assembling around the Kanban board and NAO
facilitating the session. Both rooms were equipped
with a Kanban board (whiteboard) with three
columns: (1) To-do, (2) In Progress, and (3) Done,
representing a workflow. Each student in the role of a
team member answered the three daily scum
questions and visualised tasks on the Kanban board
using post-its. Students in the role of agile coaches
observed the session. At the end, one person
photographed the Kanban board and students
participated in the online survey. After both sessions,
all participants gathered in one room for the final part,
in which mixed teams (students from the H and N
groups) compared their Kanban boards and agile
coaches provided guidance on improvements.
3.4 Measures
Our primary hypothesis was that the use of humour
the robotic facilitator of Scrumban would result in
higher ratings of the robot’s competence, the quality
of the robotic facilitation and the learning experience
compared to the neutral condition. Our secondary
hypothesis was that the use of humour by NAO would
result in lower ratings of learning outcomes compared
to the neutral condition, as a session without humour
may be perceived as more serious and less distracting.
Our hypotheses were informed by previous studies,
e.g. Belpaeme, et al. (2018) who indicated that social
robots can effectively enhance an educational
Humour in Educational Robots: Investigating the Effects of Humour in a Robot-Led Scrumban Simulation in Business Education
317

experience, Johanson et al. (2020) and
Christoforakos et al. (2021) which showed that humor
can increase perceptions of robot’s competence and
likeability, and Niculescu et al. (2013) who found that
humor can improve task enjoyment and the
perception of a robot. The effects of humour were
nevertheless uncertain, considering findings from
Dybala et al., (2009) and Gorham & Christophel
(1990). The post survey included five scales used to
measure participants’ perceptions of robot-enacted
humour, learning experience, learning outcomes,
facilitator’s competence and facilitation quality. All
items were rated on a 5-point scale from 1=disagree
strongly to 5=agree strongly:
Robot-enacted humour was measured by two
items (“NAO was humorous”; “The amount of
humour was appropriate”). These items were
used as a manipulation check, following the
approach proposed by Johanson et al. (2020).
Learning experience was measured by 22 items
from the scale by Fokides et al. (2021) with 76
items. We applied the shortened version
adapted to HRI by Buchem (2023) and added
two new items on to peer interaction (“I
enjoyed the interaction with my peers”) and the
atmosphere (“I enjoyed the atmosphere of the
session”). Reliability was high, α = .872.
Learning outcomes were measured by two self-
designed items: one about the general outcome
(“The goal of the session was to provide a
hands-on experience of Scrumban. How well
did this session fulfil its goal?), and one about
the robot (“NAO’s facilitation was helpful to
understand a daily meeting.”).
Facilitator’s competence was measured by six
items (competent, confident, capable, efficient,
intelligent, skillful) using the scale was by
Fiske et al. (1999), which was applied by
Christoforakos et al. (2021) to measure
perceived competence of robotic facilitators.
The internal consistency was high, α = .844.
Facilitation quality was measured by three
self-designed items about facilitation
(interesting, motivating, entertaining). The
internal consistency was good, α = .787.
4 RESULTS
Statistical analyses were conducted with IBM SPSS
v29 using the five scales described above.
Robot-enacted Humour (HU): A chi-square test
showed that more participants in the H condition
rated the robot as highly humorous with a 4-5 points
(7/15) compared to the N condition (0/15), chi-square
= 13.059, p < 0.05. More participants in the H
condition rated the amount of humour as appropriate
with a 4-5 points (8/15) compared to the N condition
(0/15), chi-square = 12.952, p < 0.05. 17/30 students
in both conditions rated the robot as fairly humorous
with 3 points.
Learning Outcomes (LO): A chi-square test
showed that an equal number of participants in both
conditions rated the general outcome with a 4-5
points (12/15), chi-square = 1.950, p > 0.05. 16/30
students in both conditions rated the first outcomes
with 4 points. There were no ratings of 1 (lowest).
There was a slight, but not significant, difference in
ratings of the second outcome. Contrary to
expectations, the 4-5 point rating in the H condition
(9/15) was more frequent compared to the N
condition (7/15), chi-square = 2.726, p > 0.05. 13/30
students (N and H) rated this outcome with 4 points.
Learning Experience (LX): The comparison of
mean values for 22 items of the LX scale showed that
in both conditions students could equally forget about
time (M=3.60). The H group got higher ratings for 14
out of 22 items, which were related to positive aspects
such as having fun (M=3.13 vs. M=3.00), atmosphere
(M=3.73 vs. M=3.53), focus (M=3.40 vs. M=3.33),
curiosity (M=3.40 vs. M=2.60), knowledge (M=2.87
vs. M=2.80), sense of control (M=3.60 vs. M=3.40),
motivation (M=3.40 vs. M=3.13), feeling successful
(M=3.73 vs. M=3.27), readiness to apply what was
learned (M=4.33 vs. M=3.87), ease to learn (M=3.67
vs. M=3.47), and negative aspects such as complexity
(M=4.33 vs. M=3.80) and frustration (M=1.67 vs.
M=1.53). The N group got higher ratings for 8 out of
22 items, which were related to negative aspects such
as feeling bored (M=2.33 vs. M=2.27), and positive
aspects such as enjoyment (M=2.40 vs. M=2.33),
feeling competent (M=2.07 vs. M=1.60), and peer
interaction (M=2.73 vs. M=2.53).
Facilitator’s Competence (FC): The robotic
facilitator was rated as more confident (M=4.00 vs.
M=3.37), capable (M=3.13 vs. M=3.00), efficient
(M=2.80 vs. M=2.40), intelligent (M=3.33 vs.
M=3.00), skillful (M=3.13 vs. M=2.93) but less
competent (M=3.07 vs. M=3.40) in the H condition.
Facilitation Quality (FQ): Facilitation in both
conditions was perceived as motivating (M=2.87), but
more entertaining (M=4.07 vs. M=4.00) and less
interesting (M=3.33 vs. M=3.40) in the H condition.
Scale Scores: The comparison of mean values for
scale scores revealed slightly lower ratings in the N
condition for the FC scale (M = 3.07 vs. M = 3.24),
and the LX scale (M = 3.03 vs. M = 3.20). The FQ
CSEDU 2024 - 16th International Conference on Computer Supported Education
318

scale was slightly higher in the N condition (M = 2.73
vs. M = 2.59) (Figure 2). Independent samples T-tests
yielded no significant differences, neither for single
items nor for scale scores).
Figure 2: Ratings in the N and H conditions for aggregated
scale scores. (Error bars represent the standard error).
Independent samples T-tests related to gender
differences revealed one statistically significant result
for the LX6 item “I felt frustrated” (p = 0.016).
Female students rated this item significantly lower
(M = 1.35, SD = .606) compared to male students (M
= 1.92, SD = 1.256). Frustration was higher in the H
condition (M=1.67 vs. M=1.53). The H group had
more males (n=9) compared to the N group (n=4). In
the H condition, 3 out of 9 males indicated high levels
of frustration with a 3-5 point rating, while females
chose only low ratings of 1-2. These differences were
not significant. Correlation between LX6 and HU was
not significant.
Qualitative results: Responses to an open-ended
question seeking students' recommendations
regarding the integration of robot-enacted humour,
revealed that the majority of students advocated for
the inclusion of robot-enacted humour, emphasising
the capacity of humour to create a more enjoyable and
relaxed learning atmosphere. Participants suggestions
exemplify the spectrum of preferences of robot-
enacted humour. Students’ recommendations fall into
five main categories: (1) Balance: create a balance
between humorous and serious, learning setting. A
robot should be relaxed and funny, but at the same
time focused; (2) Speed: design quick interactions,
robot’s jokes should strive for brevity; (3) Variety:
use a mix of varied conversational humour; (4)
Authenticity: robot’s humour should feel authentic;
(5) Customisation: tailor robot's humour to
educational objectives, e.g. lighthearted remarks for a
relaxed atmosphere, and more extravagant remarks
for grabbing the attention.
5 DISCUSSION
The research question was: How will the use of
humour by an educational robot affect students’
perceptions of the robotic facilitator and robot-led
facilitation, as well as students’ learning experience,
and learning outcomes? Our results, specifically the
absence of statistically significant differences
between both conditions, indicate that the use of
humour by NAO did not significantly affect students’
perceptions of the learning experience (LX), learning
outcomes (LO), facilitator’s competence (FC) nor
facilitation quality (FQ). The ratings of robot-enacted
humor in both conditions indicate that more
participants found the robot highly humorous in the
humorous condition compared to the neutral one,
highlighting the effectiveness of our humor
manipulation in influencing participants' perceptions.
Results related to the Learning Experience (LX)
showed that while students in the humorous condition
had more fun, liked the atmosphere of the session
more, felt more motivated, more curious, more
focused, more successful, more in control, learned
more and were more ready to apply what they
learned, they also perceived the humorous sessions as
more complex and they felt more frustrated.
Participants in the neutral condition felt more bored
but also more competent, and they enjoyed the
session and the peer interaction more. High ratings of
learning outcomes in both conditions indicate that
students gained a good hands-on experience and a
good understanding of Scrumban.
High ratings of facilitator’s competence in the
humorous condition for 5 out of 6 items of the FC
scale indicate that the addition of humour enhanced
the perception of NAO as a confident, capable,
efficient, intelligent and skillful facilitator of the
session. As shown by Christoforakos et al. (2021),
perceived competence of a robot facilitator may be
moderated by perceived anthropomorphism. Future
studies could explore this moderating effects.
Our study uncovered a significant gender
difference, with male students reporting higher levels
of frustration compared to females, with slightly
higher levels of frustration in the humorous condition.
This discrepancy could indicate potential gender-
specific implications of the humor style employed in
our study. Building upon findings from Wu et al.
(2016), who showed that males tend to prefer
aggressive, negative humor, and females empathetic,
positive humour, it is possible that positive humor
applied in our study in some way moderated gender-
specific frustration. However, gender differences in
frustration may stem from a range of other factors,
Humour in Educational Robots: Investigating the Effects of Humour in a Robot-Led Scrumban Simulation in Business Education
319

such as technical issues in speech recognition by
NAO or other factors not captured by the study.
Nevertheless, it is advisable to consider gender-
related humour preferences when designing robot-
enacted humour in future studies.
Finally, iconic examples from the entertainment
industry (including films, TV shows, and games)
such as Star Wars, The Jetsons, and The Hitchhiker's
Guide to the Galaxy demonstrate how humour can be
incorporated in robotic characters. By drawing
insights from these cultural references, researchers
can explore which types of humour applied in
educational robots resonate with learners.
6 CONCLUSIONS
Robot-enacted humour has been studied mainly
independent of context and in isolation of social
meaning (Stoll, Jung & Fussell, 2018). This study
contributes to this field of research by embedding
robot-enacted humour in a specific educational
context. Our investigation into the impact of humour
in a robot-led facilitation of a Scrumban session with
undergraduate business students led us to the
conclusion that even though the incorporation of
humour did not yield statistically significant
differences, the results suggest that humour may
affect some aspects of the learning experience.
It is important to acknowledge limitations of our
study, namely a small sample size, one vs. multiple
sessions, the absence of baseline measurements and
pre-study ratings of humour. Our results cannot be
generalised, as the type and quality of the humour
affects the results of the study. Further calibration and
improvement of humorous elements is needed to
elicit valid data on the effects of humor on learning
from an external and ecological point of view. Future
research would benefit from collecting ratings from
learners before the study and choosing humorous
elements that appeal to specific learners.
While our study provides valuable insights into a
specific application of robot-enacted humour and
demonstrates the feasibility and acceptability of
"humoroids" in business education, further research
is needed to tailor the choice of humor to different
audiences and contexts. Another contribution of our
study is the collection of qualitative data with
recommendations for designing robot-enacted
humour, which can be inform future studies.
Future studies could possibly apply mixed
methods approaches with in-depth interviews to
explore nuanced perceptions of robot-enacted
humour, include larger samples and longitudinal
designs to provide more robust insights into the
potential impact of robot-enacted humour on
learning, also addressing novelty effects. Research
should also explore contextual factors, possible
cultural and gender differences, and social dynamics
in the classroom, e.g. group cohesion. Future studies
could compare effects of different types of humour,
and manipulate the number of humorous elements to
explore how the quantity of humour may affect the
difference facets of the learning experience.
REFERENCES
Alqudah, M., Razali, R. (2018). An Empirical Study of
Scrumban Formation based on the Selection of Scrum
and Kanban Practices. International Journal on
Advanced Science. In Engineering and Information
Technology. Vol. 8, No. 6, 2315-2322,
DOI:10.18517/ijaseit.8.6.6566
Anwar, S., Bascou, N. A., Menekse, M., Kardgar, A.
(2019). A Systematic Review of Studies on Educational
Robotics. In Journal of Pre-College Engineering
Education Research (J-PEER), 9(2), Article
2.https://doi.org/10.7771/2157-9288.1223
Bechade, L., Duplessis, G. D., Devilliers, L. (2016).
Empirical study of humour in social human–robot
interaction. In Proceedings of the International
Conference on Distributed, Ambient, and Pervasive
Interactions, 305–316.
Belpaeme, T., Kennedy, J., Ramachandran, A., Scassellati,
B., Tanaka, F. (2018). Social robots for education: a
review. In Sci. Robot. 3, eaat5954.
Buchem I. (2023). Scaling-Up Social Learning in Small
Groups with Robot-Supported Collaborative Learning
(RSCL): Effects of Learners’ Prior Experience in the
Case Study of Planning Poker with the Robot NAO. In
Applied Sciences, 13, 4106.
Buchem, I., Baecker, N. (2022). NAO Robot as Scrum
Master: Results from a scenario-based study on
building rapport with a humanoid robot in hybrid higher
education settings. In Salman Nazir (Ed.) Training,
Education, and Learning Sciences. AHFE (2022), 59,
65–73. AHFE International, USA.
Buchem, I., Christiansen, L., Glißmann-Hochstein, S.
(2023). Planning Poker Simulation with the Humanoid
Robot NAO in Project Management Courses. In:
Balogh, R., Obdržálek, D., Christoforou, E. (eds)
Robotics in Education. RiE 2023. Lecture Notes in
Networks and Systems, vol 747. Springer, Cham.
Christoforakos L., Gallucci A., Surmava-Große T., Ullrich
D., Diefenbach S. (2021) Can Robots Earn Our Trust
the Same Way Humans Do? A Systematic Exploration
of Competence, Warmth, and Anthropomorphism as
Determinants of Trust Development in HRI. In
Frontiers in Robotics and AI, 8:640444
Dybala, P., Ptaszynski, M., Rzepka, R., & Araki, K. (2009).
Humoroids: conversational agents that induce positive
CSEDU 2024 - 16th International Conference on Computer Supported Education
320

emotions with humor. AAMAS '09 Proceedings of The
8th International Conference on Autonomous Agents
and Multiagent Systems, 2, 1171-1172.
Dynel, M. (2009). Beyond a joke: Types of conversational
humour. In Language and Linguistics Compass, 3,
1284–1299.
Fiske, S. T., Xu, J., Cuddy, A. C., Glick, P. (1999).
(Dis)respecting versus (Dis)liking: Status and
interdependence predict ambivalent stereotypes of
competence and warmth. In Journal of Social Issues,
55(3), 473-489.
Fokides, E., Kaimara, P., Deliyannis, I., Atsikpasi, P.
(2021). Development of a scale for measuring the
learning experience in serious games. Preliminary
results. In Digital Culture & Audiovisual Challenges:
Interdisciplinary Creativity in Arts and Technology.
Gittens, C.L. (2021). Remote HRI: a Methodology for
Maintaining COVID-19 Physical Distancing and
Human Interaction Requirements in HRI Studies. In
Information Systems Frontiers, 1–16.
Gorham J., Christophel D.M. (1990). The relationship of
teachers’ use of humour in the classroom to immediacy
and student learning. Communication Education. 39(1),
46-62.
Gubenko A, Kirsch C, Smilek JN, Lubart T, Houssemand
C. (2021). Educational Robotics and Robot Creativity:
An Interdisciplinary Dialogue. Frontiers in Robotics
and AI; 8:662030.
Johanson, D. L. et al. (2020). Use of Humour by a
Healthcare Robot Positively Affects User Perceptions
and Behavior. In Technology, Mind, and Behavior,
1(2).
Li, Y., Ishi, C.T., Ward, N.G., Inoue, K., Nakamura, S.,
Takanashi, K. and Kawahara, T. (2017), Emotion
recognition by combining prosody and sentiment
analysis for expressing reactive emotion by humanoid
robot. In Asia-Pacific Signal and Information
Processing Association Annual Summit and
Conference (APSIPA ASC), 1356–1359.
Lovorn, M.G., Holaway, C. (2015). Teachers ’perceptions
of humour as a classroom teaching, interaction, and
management tool. In The European Journal of Humour
Research, 3, 24-35.
Lynch, O. H. (2002). Humorous communication: Finding a
place for humour in communication research. In
Communication Theory, 4, 423–445.
Merdan, M., Lepuschitz, W., Koppensteiner, G., Balogh, R.
(Eds.). (2016). Robotics in education research and
practices for robotics in STEM education. Springer.
Mirnig, N., Stadler, S., Stollnberger, G., Giuliani, M., &
Tscheligi, M. (2016). Robot humour: How self-irony
and Schadenfreude influence peoples rating of robot
likeability. In Proceedings of the 25th IEEE
International Symposium on Robot and Human
Interactive Communication (RO-MAN), 166–171.
Mora, R.A., Weaver, S., Lindo, L.M. (2015). Editorial for
special issue on education and humour: Education and
humour as tools for social awareness and critical
consciousness in contemporary classrooms. In The
European Journal of Humour Research, 3, 1-8.
Morrison, M. K. (2008). Using Humour to Maximize
Learning: The Links between Positive Emotions and
Education. Lanham, MD: Rowman & Littlefield.
Musiichuk M.V., Gnevek O.V., Musiichuk, S.V. (2018).
Cognitive-Affective Aspect Of Humour Influence On
Development Of Students' Innovative Abilities. In
Proceedings of the International Conference on
Research Paradigm Transformation in Social Sciences
RPTSS 2017, 972-978.
Niculescu, A., van Dijk, B., Nijholt, A., Li, H., See, S. L.
(2013). Making social robots more attractive: The
effects of voice pitch, humour and empathy. In
International Journal of Social Robotics, 5, 171–191.
OECD (2021), OECD Digital Education Outlook 2021:
Pushing the Frontiers with Artificial Intelligence,
Blockchain and Robots, OECD Publishing, Paris.
Omokawa, R., Kobayashi, M. and Matsuura, S. (2019),
Expressing the Personality of a Humanoid Robot as a
Talking Partner in an Elementary School Classroom.
Universal Access in Human-Computer Interaction.
Theory, Methods and Tools. In: M. Antona and C.
Stephanidis (eds.) HCII 2019. Lecture Notes in
Computer Science, 11572, 494–506, Springer Cham.
Petricioli, L., Fertalj, K. (2022). Agile Software
Development Methods and Hybridization Possibilities
Beyond Scrumban. In 2022 45th Jubilee International
Convention on Information, Communication and
Electronic Technology (MIPRO), 1093-1098.
Samson, А.С., Gross. J.J. (2012). Humour as emotion
regulation: The differential consequences of
negative versus positive humour. Cognition and Emotion.
26(2), 375–384.
Stoll, B., Jung, M.F., Fussell, S.R. (2018). Keeping it Light:
Perceptions of Humour Styles in Robot-Mediated
Conflict. In IEEE International Conference on Human-
Robot Interaction.
Suls, J. (1983). Cognitive Processes in Humour
Appreciation. In: McGhee, P.E., Goldstein, J.H. (eds)
Handbook of Humour Research. Springer, New York.
Wu, C.-L., Lin, H.-Y., & Chen, H.-C. (2016). Gender
differences in humour styles of young adolescents:
Empathy as a mediator. In Personality and Individual
Differences, 99, 139–143
Humour in Educational Robots: Investigating the Effects of Humour in a Robot-Led Scrumban Simulation in Business Education
321
