
Efficient Deployment of Neural Networks for Thermal Monitoring
on AURIX TC3xx Microcontrollers
Christian Heidorn
1 a
, Frank Hannig
1 b
, Dominik Riedelbauch
2 c
,
Christoph Strohmeyer
2 d
and J
¨
urgen Teich
1 e
1
Department of Computer Science, Friedrich-Alexander-Universit
¨
at Erlangen-N
¨
urnberg (FAU), Germany
2
Schaeffler Technologies AG & Co. KG, Herzogenaurach, Germany
Keywords:
AURIX TriCore, Neural Networks, Thermal Monitoring.
Abstract:
This paper proposes an approach for efficiently deploying neural network (NN) models on highly resource-
constrained microcontroller architectures, particularly AURIX TC3xx microcontrollers. Here, compression
and optimization techniques of the NN model are required to reduce execution time while maintaining accu-
racy on the target microcontroller. Furthermore, especially on AURIX TriCores that are frequently used in
the automotive domain, there is a lack of support for automatic conversion and deployment of pretrained NN
models. In this work, we present an approach that fills this gap, enabling the conversion and deployment of
so-called thermal neural networks on AURIX TC3xx microcontrollers for the first time. Experimental results
on three different NN types show that, when pruning of convolutional neural networks is applied, we can
achieve a speedup of 2.7× compared to state-of-the-art thermal neural networks.
1 INTRODUCTION
Deploying neural networks (NNs) on microcon-
trollers allows AI applications to be run close to the
sensors and increases the scope for future applica-
tions. For example, NNs can be used in electric ve-
hicles to predict battery charge (Petersen et al., 2022)
or implement thermal management of the electric mo-
tor (Kirchg
¨
assner et al., 2023). However, executing
neural networks on microcontrollers is challenging
because of scarce memory resources and very limited
computing power.
For deploying NNs on microcontrollers, inference
libraries are typically designed to efficiently manage
the few available resources and fit the tight memory
budget (Lin et al., 2020). Typically, those lightweight
inference libraries are implemented in C or C++
in combination with a conversion workflow (David
et al., 2020; Deutel et al., 2022; Lin et al., 2020)
that generates library function calls for an NN. These
workflows are often realized within popular machine
learning (ML) frameworks, e.g., TensorFlow (Abadi
et al., 2015) or PyTorch (Paszke et al., 2017), or
a
https://orcid.org/0009-0002-7557-0350
b
https://orcid.org/0000-0003-3663-6484
c
https://orcid.org/0000-0002-7937-4755
d
https://orcid.org/0000-0003-3982-4499
e
https://orcid.org/0000-0001-6285-5862
relying on an exchange format description, such as
ONNX (Open Neural Network Exchange, (Bai et al.,
2019)).
Workflows such as TensorFlow Lite Micro (David
et al., 2020) and microTVM (Chen et al., 2018) have
drawbacks as they rely on an interpreter to execute
the network graph at runtime. This adds memory and
latency overhead (Lin et al., 2020). In addition, opti-
mizations are performed merely at the layer level of
an NN, which misses the potential of globally opti-
mizing the overall NN graph, e.g., by layer fusion (Al-
wani et al., 2016; Heidorn et al., 2020). Another
drawback of inference libraries is the effort required
to integrate them into other standardized automotive
architectures, such as AutoSAR (Automotive Open
System Architecture) (Bunzel, 2011), a software ar-
chitecture for automotive systems, especially when
managing multiple dependencies and ensuring com-
patibility with other parts. Within such automotive
frameworks, the use of external libraries and hard-
ware platforms (e.g., AURIX TriCore) is often re-
stricted. This often necessitates a complete redesign
of the inference library and workflow.
When it comes to developing a new NN model,
most of the existing workflows do not provide any in-
formation about how the model will perform on the
target microcontroller, especially considering the ex-
ecution time. Automotive systems typically have real-
time requirements. However, during the development
64
Heidorn, C., Hannig, F., Riedelbauch, D., Strohmeyer, C. and Teich, J.
Efficient Deployment of Neural Networks for Thermal Monitoring on AURIX TC3xx Microcontrollers.
DOI: 10.5220/0012563100003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 64-75
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

of the neural network model, a programmer or data
scientist is typically unaware of whether the model
can deliver predictions within the specified time con-
straints. With current workflows, this leads to time-
consuming trial and error, as the model has to be
adapted, trained, and deployed on the target device
several times until it meets the time and memory con-
straints for the target hardware while still achieving
acceptable accuracy.
Given the limitations of the methods mentioned
above, we present an approach that paves the way to
high throughput, accurate, and low memory footprint
ML implementations for highly resource-constrained
microcontroller targets used in automotive applica-
tions, especially for the AURIX TriCore 3xx family.
Our main contributions are:
• A versatile C code generator supporting TC3xx
AURIX embedded microcontrollers, enabling the
seamless deployment of different types of neural
networks and integration into automotive systems.
• A flexible and extendible approach from neural
network implementation to deployment on the
target microcontroller integrating important
optimization techniques (i.e., pruning, and ap-
proximation of special activation functions) to
reduce the size and execution time of the neural
network model.
• A case study exploring the interplay between the
optimization techniques and their impact on the
execution time and prediction error of thermal
neural networks (TNNs) in comparison with
temporal convolutional neural networks (TCNs)
and recurrent neural networks (RNNs) on AURIX
TriCore 387.
The remainder of this paper is organized as follows:
Section 2 provides fundamentals on neural network
compression and optimizations, and Section 3 dis-
cusses related work. In Section 4, we present our
novel approach. Section 5 introduces the case study,
as well as the dataset and models, which are used in
the experimental evaluation (Section 6) before Sec-
tion 7 concludes.
2 FUNDAMENTALS
Neural networks (NNs) consist of multiple layers of
different types and can be represented as data flow
graphs. NNs have trainable layers with weights, such
as fully connected and convolutional layers. Typi-
cally, non-linear activation functions are applied af-
ter each of these layers, e.g., rectified linear unit
(ReLU), hyperbolic tangent (tanh), or sigmoid func-
tions. A broad range of compression methods exists
for efficient deployment on microcontrollers, includ-
ing pruning (Han et al., 2016) and approximations of
expensive activation functions (Qian et al., 2023).
Pruning
Pruning (also referred to as sparsification) reduces the
number of neurons and their connections in order to
compress the original model. The general goal of
this sparsification is to reduce the number of param-
eters — and, by that, the number of floating point op-
erations (FLOPs) used for multiply-accumulate oper-
ations for the trainable layers in the NN. There are
two general pruning strategies: element-wise prun-
ing (Han et al., 2016; Han et al., 2015) and structural
pruning (He et al., 2017; Li et al., 2017). Element-
wise pruning removes connections from the computa-
tional graph of an NN and sets individual weights of
a given layer to zero. By contrast, structural pruning
sets entire structures of parameters to zero. For ex-
ample, entire filters can be removed for convolutional
layers, or rows and columns of the weight matrix can
be eliminated in fully connected layers. This can re-
duce execution time by reducing the number of loop
iterations required to process the layers. There are
several heuristics to decide which weights or struc-
tures of weights to remove. The most common heuris-
tics are ℓ
1
or ℓ
2
norm of the weights. Here, the filters
(or rows and columns) with the lowest ℓ
1
values are
set to zero and removed.
Approximation of Complex Activation Functions
LSTM cells or thermal NNs presented in the use case
(see Section 5) for predicting the temperature in an
electric motor require special functions, such as hy-
perbolic tangent and sigmoid functions. Since these
functions involve exponential calculations, they are
comparatively time-consuming to calculate on micro-
controllers. As an alternative, the sigmoid and hy-
perbolic tangent can be replaced by the Hardsigmoid
(Equation (1)) and Hardtanh (Equation (2)) functions,
respectively, which are far less compute-intensive.
Hardsigmoid(x) =
0 if x ≤ −3
1 if x ≥ 3
x
6
+
1
2
otherwise
(1)
Hardtanh(x) =
−1 if x < −1
1 if x > 1
x otherwise
(2)
Efficient Deployment of Neural Networks for Thermal Monitoring on AURIX TC3xx Microcontrollers
65

In Section 6, we evaluate how applying pruning
and replacing the tanh and sigmoid functions by their
respective approximation affects the prediction error
and execution time on a target microcontroller for
thermal neural networks.
3 RELATED WORK
Traditional deployment of neural networks has a high
memory and computational footprint, which hinders
its direct application on highly resource-constrained
microcontrollers. This requires a dedicated approach
for developing and compiling neural networks to
resource-constrained microcontroller targets, ensur-
ing that the computational and latency budget is
within the device limits while still achieving the de-
sired performance (Saha et al., 2022). Recently, ap-
proaches from industry and academia that differ in
their support of neural network types
1
, input formats,
and support of microcontrollers have emerged. A
brief overview is given in the following and is sum-
marized in Table 1.
3.1 Workflows for Deploying Neural
Networks on Microcontrollers
Software development for microcontrollers is typi-
cally based on C or C++ programming. Thus, some
ML workflows already come with an inference li-
brary (David et al., 2020; Deutel et al., 2022; Lin
et al., 2020; Ma, 2020) developed in C or C++.
Here, operator function calls required to compute the
neural network inference are baked into C or C++
during code generation. Typically, the inference li-
brary is intended to be sufficiently generic to be used
on any type of 32-bit microcontroller and, therefore,
portable. However, this also means that there is no
integration with specific microcontroller families and
vendor tools. Another drawback is the additional
overhead involved in integrating the inference library
into an existing project. This can require some effort,
especially when managing multiple dependencies and
ensuring compatibility with other software compo-
nents. In addition, the library itself can add code size,
especially if it needs to be extended for other micro-
controller targets, and a runtime overhead due to the
library abstraction and additional processing required
for the dynamic execution of models. These over-
heads make deployment even more challenging as
1
For example, multilayer perceptron (MLP), convolu-
tional neural networks (CNNs), recurrent neural networks
(RNNs)
they partially offset the achieved speed-up and com-
pression by NN compression techniques. One infer-
ence library available for AURIX TriCore 2xx and
3xx microcontrollers is from Ekkono
2
. Ekkono pro-
vides a C inference library for deploying NN mod-
els on AURIX platforms. However, there is no infor-
mation about the workflow and which frameworks or
types of NNs are supported.
Target-Specific Inference Libraries
Inference libraries often use low-level optimizations,
such as those provided by ARM’s CMSIS-NN library
and data formats (ARM uses the Q-format
3
). In or-
der to support targets such as AURIX TriCores, the
library or kernel functions have to be extended (Lai
and Suda, 2018). So far, inference libraries such as
MCUNet (Lin et al., 2020) and microTVM (Chen
et al., 2018) are based on CMSIS-NN and thus do
not support other targets than ARM. To target the Tri-
Core microarchitecture, all operators would need to
be newly implemented and added to the library. In
addition, the workflow and its code generation back-
end needs to be modified or needs to be implemented,
as recently shown for microTVM (Liu et al., 2023).
Generic Inference Libraries for Microcontrollers
NNOM (Ma, 2020), TF Lite Micro (David et al.,
2020), and DNNruntime (Deutel et al., 2022) are ex-
amples of generic inference libraries capable of gen-
erating ANSI C code. TF Lite Micro and DNNrun-
time also support the floating point format. These li-
braries are generally suitable to generate compilable
C code for TriCores, which has not yet been done. Im-
plementing target-specific (e.g., for TriCore TC3xx)
optimizations for operators or parallel execution on
multiple cores can also be cumbersome, and core-
specific C code generation may be required. Again,
one has to dive into the inference library and add the
C code for the operator, and usually, the code gen-
eration also has to be refined. Glow (Rotem et al.,
2018) is a neural network compiler that uses multi-
ple levels of its own intermediate representation (IR)
in the entire stack. For example, Glow’s CPU back-
end executes low-level Glow instructions and calls in
its own standard library kernels implemented in C++
and compiled with LLVM. The latter point especially
makes Glow challenging to bring on TC3xx micro-
controllers due to limited compiler support.
2
Ekkono, “From Connected To Smart”, https://www.
ekkono.ai/, Date accessed: 01/10/2024
3
ARM, “Compute the layer Q-formats”,
https://developer.arm.com/documentation/102591/2208/
Compute-the-layer-Q-formats, Date accessed: 12/20/2023
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
66

Table 1: Overview of existing workflows to deploy neural networks on microcontrollers.
Approach Frameworks / Networks Optimized Output Precision
Formats MLP CNN RNN µC Backend int float
MCUNet
(Lin et al., 2020)
TensorFlow,
TF Lite
✓ ✓ ✗ ARM C++ inference lib.
& C++ descriptors
✓ ✗
TF Lite Micro
(David et al., 2020)
TensorFlow,
TF Lite
✓ ✓ ✓ ARM,
RISC-V
C++ inference lib.
& C++ descriptors
✓ ✓
NNOM
(Ma, 2020)
Keras ✓ ✓ ✓ ARM,
RISC-V
C inference lib.
& C descriptors
✓ ✗
DNNruntime
(Deutel et al., 2022)
PyTorch, ONNX ✓ ✓ ✗ ARM C inference lib.
& C descriptors
✓ ✓
microTVM
(Chen et al., 2018)
TensorFlow,
PyTorch, ONNX
✓ ✓ ✗ ARM C inference lib.
& C descriptors
✓ ✗
Glow
(Rotem et al., 2018)
PyTorch, ONNX ✓ ✓ ✓ – requires LLVM
compilation
✓ ✓
Dory
(Burrello et al., 2021)
PyTorch, ONNX ✓ ✓ ✓ RISC-V C code ✓ ✗
Proposed PyTorch, ONNX ✓ ✓ ✓ TriCore C code ✓ ✓
Code Generators
Dory (Burrello et al., 2021) comes without an infer-
ence library and generates C code for a given model
that does not require linking to an inference library.
Generating C code gives the possibility of seamless
integration into other projects and provides the ability
to fine-tune memory management for the target plat-
form. For example, one can optimize memory usage
based on the specific constraints of the target micro-
controller and extend code generation for the target-
specific memory hierarchy. However, Dory is dedi-
cated to RISC-V targets and has a defined memory
hierarchy. In addition, Dory relies on quantized neu-
ral networks as inputs when it comes to model com-
pression and only supports integer precision. How-
ever, we argue that on platforms such as AURIX
embedded microcontrollers provide single-precision
floating-point computation. The support of floating-
point computations is beneficial, especially for com-
plex activation functions (e.g., hyperbolic tangent), or
to support mixed-precision models that are known to
maintain high accuracy.
Supported Input Formats and Networks
Workflows from the literature typically differ in the
description format of the neural network model and
the support of operators (see Table 1). For exam-
ple, TF Lite Micro and MCUNet support TF Lite
models developed in TensorFlow and Keras, respec-
tively. DNNruntime and Dory support the Open Neu-
ral Network Exchange Format (ONNX) (Bai et al.,
2019), giving them a more comprehensive range of
supported machine learning frameworks such as Py-
Torch, MXNet (Chen et al., 2015), and TensorFlow.
All the libraries examined support MLP and CNN
models. However, we found that some libraries (e.g.
DNNruntime) do not support RNNs, which are par-
ticularly useful for predicting time series data.
3.2 Microcontroller-Specific
Compression
A current research trend is to adapt NN models
for use in constrained platforms by compressing the
NN topologies themselves (Sandler et al., 2018),
either directly or by applying neural architecture
search (Liberis et al., 2021; Lin et al., 2020). Orthog-
onally, techniques for pruning, post-training quantiza-
tion, and quantization-aware fine-tuning can be used
to reduce the cost of individual operations in terms
of energy, and of individual parameters in terms of
memory.
Some of the approaches listed in Section 3.1 al-
ready integrate compression techniques. For exam-
ple, TF Lite Micro is based on TensorFlow and Keras
and provides quantization and weight clustering tech-
niques. However, workflows such as TF Lite Micro
do not come with tools to estimate performance indi-
cators such as inference time or RAM and ROM us-
age (Novac et al., 2021), or profiling when executed
on the target microcontroller. This is a major short-
coming, as the developer will only find out if the de-
veloped NN meets the constraints of the target hard-
Efficient Deployment of Neural Networks for Thermal Monitoring on AURIX TC3xx Microcontrollers
67
Section 4.1 Section 4.2
NN Model
• MLP
• CNN
• RNN
Dataset
Evaluation of
• MSE
• No. of weights
• Type & no. of operations
• Execution time
• RAM/ROM
required
Model-specific µC-specific
Constraints
met?
User-guided
Compression
and
Optimization
Conversion
to ONNX
• Graph optimizations
• Operator fusion
Template-
based C code
generation
Compilation
&
Deployment
µC
✓
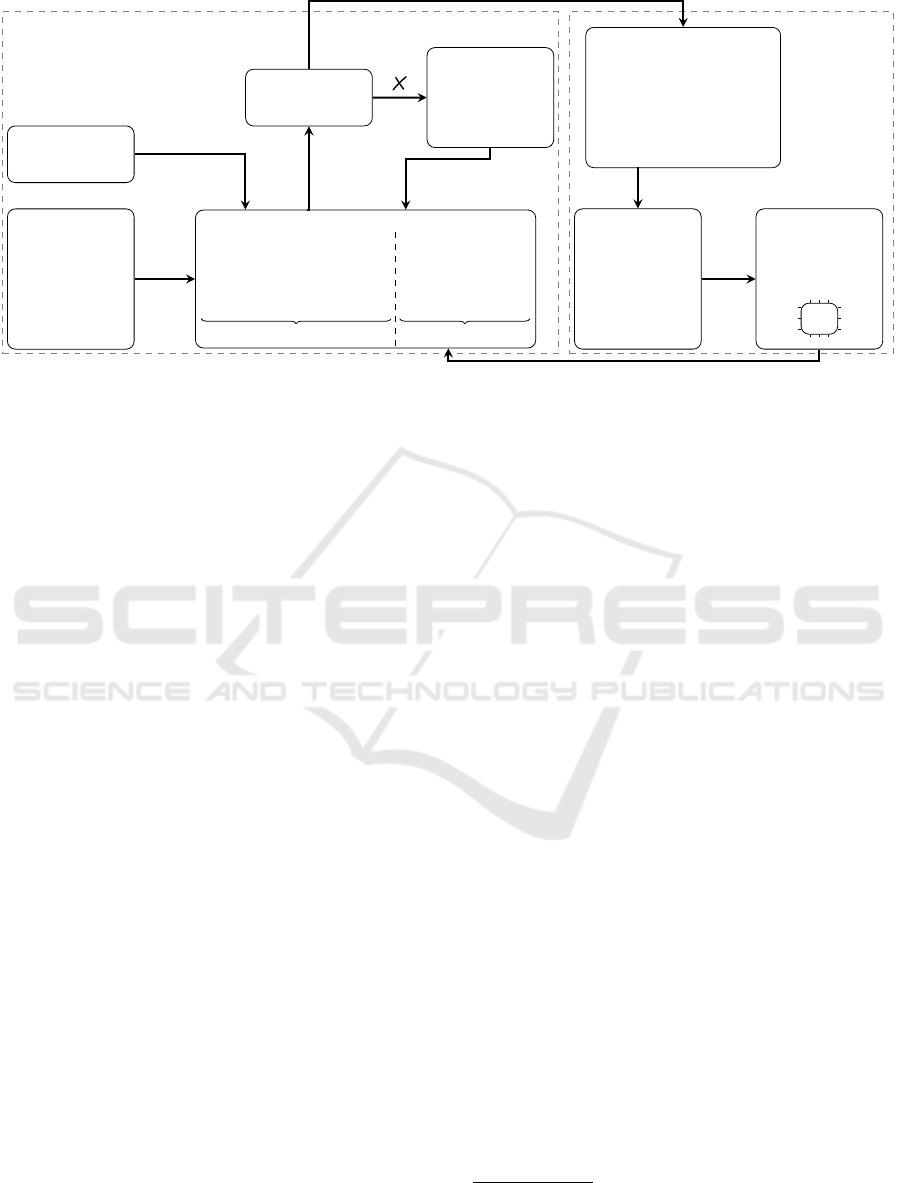
Figure 1: Overview of our proposed approach for seamless neural network deployment on the target microcontroller (µC).
The arrows denote the path for deploying a given NN. If the constraints on execution time and memory consumption are met,
the model is converted and code is generated. If the constraints are not met, the workflow offers the possibility to compress
(prune) the model iteratively until the model satisfies the constraints.
ware after deployment. This results in a large time
overhead as the NN has to be tuned, trained, and re-
compiled.
Instead, DNNruntime and MCUnet have the ca-
pability to estimate if the model meets the memory
requirements (RAM and ROM usage) of the micro-
controller. DNNruntime scales down already defined
neural networks by means of pruning and quantiza-
tion until the memory requirements are met. The ad-
vantage here is that existing trained neural networks
can be used for deployment on the target microcon-
troller. However, after compression, the prediction
quality of the model might be reduced. Again, the
model has to be redesigned and trained, which is time-
consuming. MCUNet focuses on neural architecture
search (NAS) to find networks that meet target plat-
form constraints. Here, the models have to be trained
from scratch. If a model that meets the target plat-
form constraints is found, the user can be sure that
this model is deployable on the platform.
4 WORKFLOW
We have seen in Section 3 that existing workflows
lack support for either (a) recurrent neural networks,
(b) a TriCore backend, or (c) floating-point compu-
tations, and most come with an inference library. In
contrast, our proposed workflow displayed in Fig. 1
targets all these problems. It integrates a conver-
sion tool that maps pretrained NNs stored in ONNX
format to C code, exploiting the static properties of
trained NNs (i.e., fixed layer configurations and pa-
rameters) such that no dependence on an inference li-
brary is required. This not only reduces the computa-
tional overhead at runtime but also allows for seam-
less integration into other projects or frameworks.
Moreover, our workflow gives options to apply var-
ious optimizations on a given neural network model,
both at the graph level (e.g., by fusing successive op-
erators or loop fusion) and at the operator level. In the
following, we elaborate on the two main parts of the
workflow: Section 4.1 presents the supported frame-
works for NN development and compression. Sec-
tion 4.2 explains the integrated code generator.
4.1 NN Model and Compression
Our workflow supports various Python frameworks
for specifying neural networks, such as PyTorch or
TensorFlow, by relying on the ONNX standard. The
models are assumed to be predefined and pretrained
by an ML specialist. Due to our modular concept,
it is possible to integrate different Python libraries
for compressing a predefined neural network, such
as Microsoft Neural Network Intelligence (NNI)
4
.
This provides options for pruning a predefined neural
network to meet desired constraints (e.g., execution
time). Here, the user guides the compression by se-
lecting the strategy, either global or layer-wise prun-
ing, and the respective pruning ratio(s). We show-
case the workflow functionality by the example of
global pruning in our experiments in Section 6 to
4
Microsoft, “Neural Network Intelligence (NNI)”,
https://github.com/microsoft/nni, Date accessed:
01/15/2024
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
68
show the effect of pruning on the error in predict-
ing engine temperatures from time series data. Inte-
grating further compression techniques (e.g., quanti-
zation) is left for future work.
After the compression step, the models are con-
verted to ONNX format. Python frameworks such as
PyTorch and MXNet (Chen et al., 2015) have built-in
functionality for ONNX export. To support the Ten-
sorFlow model, we use the tf2onnx
5
library.
4.2 Template-Based C Code Generation
ONNX (Bai et al., 2019) is an exchange format de-
scribing neural networks as dataflow graphs, where
each node represents a mathematical operation, such
as element-wise addition or matrix multiplication.
One way to compile an ONNX graph into an ex-
ecutable would be to translate each layer operation
directly into C code, containing loops and possibly
other low-level instructions. However, it is beneficial
to optimize the graph itself, e.g., by fusing the op-
erational nodes of the graph, as C or C++ compilers
typically do not perform these optimizations (Rotem
et al., 2018). Notable optimization techniques include
/* Ge ne ra te d te ns or s and fu nc ti on s
/* a re om it te d */
/* Ent ry fu nct io n */
vo id tcn ( c on st fl oa t X _1 [1 ][ 14 ][ 64 ] ,
fl oa t o ut pu t [ 1] [3 2] [ 4] )
{
no d e_ Co n vR eL U ( X_1 , conv 1_ W ,
co nv1 _B , tu . R eLU );
no de _ GE MM ( tu . ReLU , l ine ar_W ,
li nea r_ B , out pu t );
}
ONNX graph
Generated C function calls
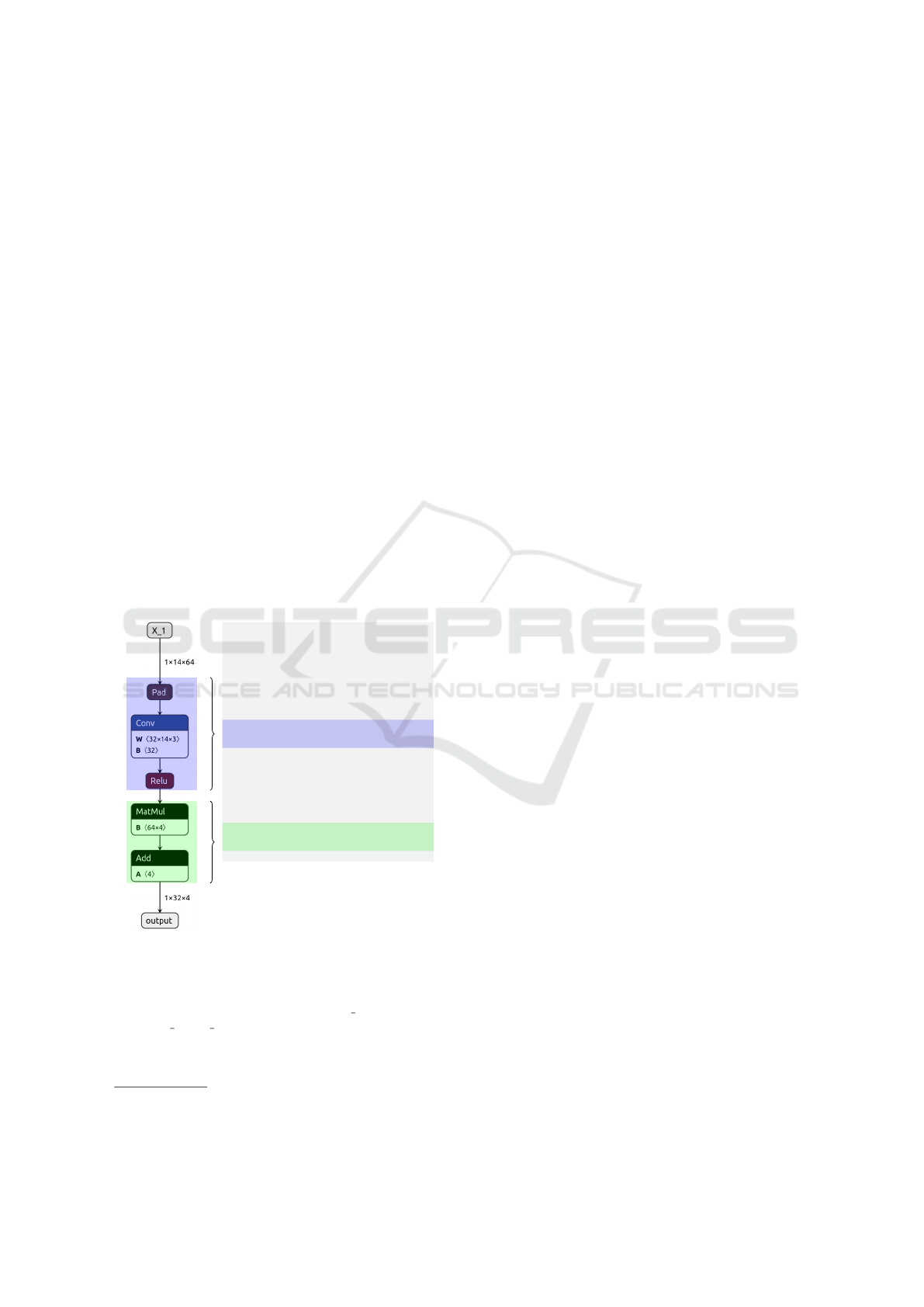
Figure 2: An exemplary ONNX representation (left) and
the C function calls generated by our workflow (right). The
ONNX graph consists of a convolutional layer (Conv), an
activation layer (ReLU), and a linear layer (MatMul and
Add). The dimensions of the input (batch size × channels
× feature vector length = 1 ×14 × 64) and output tensor
(1 × 32 × 4) are given at the arrows. Often, padding (zero-
padding in this case) is applied to maintain the output di-
mension after the convolutional layer.
5
ONNX, “tf2onnx”, https://github.com/onnx/
tensorflow-onnx, Date accessed: 01/15/2024
merging activation functions into preceding convo-
lutional or matrix multiplication operations. An-
other example of graph optimization is the transfor-
mation of a matrix-matrix multiplication followed by
a vector addition into a general matrix multiplication
(GEMM), which is often required for multi-layer per-
ceptrons, as it seems that the built-in exporters in Py-
Torch often model a linear layer as two separate oper-
ations (matrix-matrix multiplication with the weights,
and vector addition on the resulting output by a bias).
In addition, some operations can be removed from the
computational graph of an NN (e.g., in the case of
zero-padding).
Currently, our workflow supports convolutions,
linear transformations, pooling operations, and acti-
vation functions. It also supports more complex oper-
ators, such as long short-term memory cells, and ap-
plies approximations of activation functions.
Using an intermediate representation describing
the operators in Python, for each operator (e.g.,
GEMM), we use different predefined, parameterized
C code templates for code generation. Here, we apply
code optimizations (e.g., operator or loop fusion) to
reduce execution time and memory requirements, as
shown for an example in Fig. 2. The example shows
a convolutional layer with zero-padding applied, fol-
lowed by an activation layer (here, ReLU) and a fully
connected linear layer. The zero-padding operator can
be directly integrated and removed from the convolu-
tional layer. In our workflow, patterns (e.g., convo-
lution followed by ReLU) are recognized, and a new
operator (here, the ConvReLU operator) is generated
while retaining the correct functionality. The linear
layer consists of a matrix multiplication of the input
matrix with a weight matrix, followed by a vector ad-
dition of the bias, which is fused to a GEMM opera-
tor. For the intermediate tensors, tensor unionization
is performed to wrap the tensors into unions to help
the compiler reuse heap memory (visualized by ”tu.”
in Fig. 2). Unlike a runtime library, where new oper-
ators have to be added to an existing library and the
workflow must be modified, it only takes one step to
integrate new templates into our workflow. The final
result of code generation is a single C file contain-
ing all the necessary operation nodes required for the
model’s inference. This file can be easily incorpo-
rated into other software projects, e.g., one can in-
tegrate the C code into Matlab (Matlab Embedded
Coder) (MathWorks, 2022).
Efficient Deployment of Neural Networks for Thermal Monitoring on AURIX TC3xx Microcontrollers
69

5 CASE STUDY
Temperature estimation tasks are necessary for elec-
tric drives for automotive as well as for automation
applications. As a motivating example, having fast
and accurate estimations for the rotor temperature
helps to manufacture motors with fewer sensors while
still enabling control strategies to utilize the motor
to its maximum capability. Advancing the trend of
fitting models on empirical data, machine-learning-
based thermal modeling, with neural networks was
proposed recently.
NNs neither require any domain expert’s knowl-
edge nor geometry or material information for their
design at the same level of accuracy as compared to
formerly used lumped parameter thermal networks
(LPTNs), which model equivalent circuit diagrams
approximating inner heat transfer based on thermody-
namic theory (Kirchg
¨
assner et al., 2021a). However,
an increased computational demand for NNs in real-
time is required. Kirchg
¨
assner et al. have tuned NNs
to estimate temperatures of interest in a Permanent
Magnet Synchronous Motor (PMSM) (Kirchg
¨
assner
et al., 2021a). Here, recurrent neural networks and
convolutional neural networks are used to predict
the temperature profile in the stator teeth, winding,
and yoke as well as the rotor’s permanent magnets.
Ground truth data is available from test bench runs.
Neural networks have already proven well for
classification tasks (e.g., in image processing), and
many works to compress them have been proposed.
However, in the case of thermal monitoring, the neu-
ral networks are typically designed to solve a regres-
sion problem, minimizing a loss function, e.g., the
Mean Squared Error (MSE, Eq. (3)) between the pre-
dicted value and the ground truth.
In the following, we consider a time series of sam-
ples i, with ˆy
i
denoting the predicted value, y
i
the ac-
tual value, and N the number of samples. The MSE to
be minimized is defined as
MSE =
N
∑
i=1
( ˆy
i
− y
i
)
2
N
. (3)
In our experiments (Section 6), we show how to
compress neural networks designed for thermal pre-
diction properly to fit the memory requirements of
an AURIX TC3xx target and how pruning affects the
predictions on the different targets, which, to the best
of our knowledge, is done for the first time.
5.1 Dataset
For the training and evaluation, we used the pub-
licly available Electric Motor Temperature (EMT)
dataset from (Kirchg
¨
assner et al., 2021b), consisting
of temperature sequence data at different positions in
a PMSM motor taken from a test bench. A total of ten
input features are used, such as the speed of the elec-
tric motor, torque, current, ambient temperature, etc.
The regression targets are the temperatures of the per-
manent magnet, stator yoke, stator tooth, and stator
winding. In total, the data set consists of 185 hours of
recordings and integrates 69 different profiles.
5.2 Models
In our experiments, we compare three different mod-
els trained on the EMT dataset:
Thermal Neural Network (TNN) is a publicly
available Neural Network from (Kirchg
¨
assner et al.,
2023). It consists of three multi-layer perceptrons
(MLPs), working as function approximators for mod-
eling three ordinary differentiable equations
6
. The ac-
tivation functions resulting in the lowest MSE found
with an extensive design space exploration are hyper-
bolic tangent and sigmoid.
Temporal Convolutional Neural Network (TCN)
is a type of convolutional neural network (CNN) de-
signed explicitly for sequence modeling tasks. TCNs
consist of 1-dimensional convolutional layers, where
the trained filters are convolved over the time dimen-
sion. They showed promising results when applied
to sequence data and are also known to perform bet-
ter in terms of MSE than, for example, recurrent neu-
ral networks (RNNs) when applied to the problem of
thermal prediction (Kirchg
¨
assner et al., 2021a). As
we do not have access to the exact CNN model used
by (Kirchg
¨
assner et al., 2021a), we reconstructed a
comparable CNN by ourselves. In Kirchg
¨
assner et.
al, the model consisted of two convolutional blocks
of 16 kernels with a kernel size of 2. Our CNN con-
sists of two 1-D convolutional layers of 32 kernels,
each with a kernel size of 3, with rectified linear units
(ReLU) layers used as activation functions, and one
fully connected layer with four output neurons (cor-
responding to the four target temperatures). The in-
tention behind our larger design is to give more op-
portunity to prune the TCN, which in turn reduces the
number of kernels and may lead to better performance
after pruning and retraining.
Recurrent Neural Network (RNN) has also proven to
be a valuable type of neural network for sequence
modeling tasks. Although it has already been shown
in (Kirchg
¨
assner et al., 2021a) that RNNs result in
a higher MSE, we have integrated the RNN to also
6
One function approximator outputs thermal conduc-
tances, another the inverse thermal capacitances, and the
last one the power losses generated within the components.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
70

Table 2: Comparison of thermal neural network (TNN), TNN with approximated activations functions (TNN-H
S,T
, TNN-H
S
,
TNN-H
T
), temporal convolutional neural network (TCN) with different pruning rates, and recurrent neural network (RNN)
wrt. to mean squared error on the test data set, the number of parameters, and the measured execution times on the TC387.
Model Type Pruning Rate No. of Parameters MSE in
◦
C
2
Exec. Time on
Permanent Magnet Stator Yoke Stator Tooth Stator Winding TC387 in ms
TNN 0% 552 4.04 2.49 2.92 4.80 0.81
TNN-H
S,T
0% 552 10.82 2.64 5.65 9.67 0.26
TNN-H
S
0% 552 4.01 2.04 3.26 4.41 0.43
TNN-H
T
0% 552 5.31 2.05 3.36 5.85 0.66
TCN 0% 4,612 0.03 0.21 0.24 0.10 2.66
50% 1,540 0.13 1.89 1.10 2.07 0.89
60% 1,135 0.37 2.45 0.88 2.20 0.67
70% 784 2.03 2.31 1.11 2.00 0.47
75% 580 2.93 3.13 1.13 2.79 0.30
80% 487 14.95 5.17 1.20 7.38 0.26
90% 244 59.71 4.50 3.67 15.37 0.15
RNN 0% 2,116 2.25 2.47 2.77 3.83 35.5
provide execution time measurements for comparison
with the previous two neural networks. Similarly, our
RNN consists of a long short-term memory cell with
a hidden size of 16 and, again, one fully connected
layer with four output neurons.
6 EXPERIMENTS
The three models introduced in Section 5.2 have been
implemented in PyTorch and trained on the EMT
dataset (66 profiles were used for training) for 100
epochs, using the Adam optimizer, with the goal of
minimizing the Mean Squared Error (MSE) for four
respective target temperatures (permanent magnet,
stator yoke, stator tooth, stator winding). We used the
remaining three profiles (one example is visualized
in Fig. 3) for each target temperature as test dataset.
To determine the MSE, we calculate the average MSE
over the three profiles for each target temperature. For
deployment, PyTorch models are exported in single-
precision floating-point to ONNX and converted to
C code using our workflow depicted in Fig. 1. The
resulting C code was compiled using the HighTec
GCC compiler
7
using -O3 optimization as an argu-
ment. Execution times were measured on the AURIX
TC387 3.3 V TFT evaluation board with a TriCore
387. The TriCore 387 supports floating-point com-
putations running at a frequency of 300 MHz. For
7
HighTec, “Tricore Development Platform v4.9.3.0-
infineon-1.0”, https://hightec-rt.com/en/products/
development-platform, Date accessed: 01/15/2024
a fair comparison, all models were run on a single
core, with 240 kilobytes of scratchpad RAM, and the
floating-point format was chosen. All models and in-
put samples fit into the scratchpad memory. The TCN
consumes the most RAM (25 kilobytes, 11% of avail-
able RAM) because of the large size of the intermedi-
ate tensors (feature maps). The TNN (188 bytes) and
the RNN (1.2 kilobytes) use less than 1% of the avail-
able RAM. For all three models, the available ROM
(10 megabytes), where the weights and the program
are stored, was used by less than 1%. The execution
of the model is bare-metal, i.e., without any operat-
ing system in between. The number of clock ticks
(cycles) was measured using Ifx TickTime functions
as part of the IFX low-level driver library (iLLD),
which accesses the performance counter of the Tri-
Core. More specifically, the cycles from calling the
first operator of the NN until writing back the result-
ing output (vector with the predicted target tempera-
tures) were counted. Each experiment was conducted
100 times to calculate the average number of cycles
of one inference, from which we derived the average
execution time corresponding to the clock frequency
of the TriCore.
Table 2 gives an overview of the MSE for the un-
pruned (i.e., pruning rate equals 0%) TNN, TCN, and
RNN. The TNN and RNN show a significantly higher
MSE for the four target temperatures compared to the
unpruned TCN on the test data. We explain this dif-
ference by the fact that the unpruned TCN consists
of many more parameters (and operations) than the
TNN. For an input sequence of 64 samples (which is
used as the input length during training), the compu-
Efficient Deployment of Neural Networks for Thermal Monitoring on AURIX TC3xx Microcontrollers
71

tation of the TCN involves 290K floating-point oper-
ations (FLOPs). In contrast, the computation of the
TNN involves only 33K FLOPs, which is also vis-
ible in the higher execution times for the unpruned
TCN in Table 2. However, for the RNN, which re-
quires about 124K operations, the execution time is
much higher than for the TCN. The main reason for
this is that compute-intensive tanh and sigmoid com-
putations are required, and the implementation of the
LSTM cell
8
is much more complex than that of a con-
volutional or linear layer. This may result in fewer
optimization possibilities for the compiler. In the fol-
lowing, we prune the TCN to reduce the execution
time (see Section 6.1). Furthermore, in Section 6.2,
we propose to optimize the TNN by replacing the
costly tanh and sigmoid computations to see how the
execution time and the MSEs for the target tempera-
tures are affected.
6.1 Pruning
The TCN model has the highest execution time due
to its large number of parameters but also has a sig-
nificantly lower MSE for all four target temperatures.
Therefore, we applied structural pruning of the TCN
to reduce the execution time. For this experiment, we
prune the TCN iteratively using the ℓ
1
norm and start
with a pruning rate of 50%. The pruning rate indi-
cates how many filters are removed from each convo-
lutional layer (the higher the pruning rate, the more
filters are removed). After pruning the filters, we ap-
plied retraining for 50 epochs to allow the remaining
filter weights to adjust properly. The results in Table 2
show that the TCN with a pruning rate of 60% has a
lower execution time on the TriCore and still has a
lower MSE for all four target temperatures compared
to the TNN. In Fig. 3, the temperature predictions of
the 75% pruned TCN and the TNN are compared with
the ground truth values from one profile of the test
set. Here, it can be seen that the pruned TCN can
still predict the three target temperatures, stator tooth,
and stator winding, as well as the TNN, with slightly
less deviation when predicting the temperature of the
permanent magnet. When the 75% pruned TCN pre-
dicts the stator yoke, there is some deviation from the
ground truth. For a pruning rate of 75%, the average
MSE of the stator yoke (3.13
◦
C
2
) is slightly higher
than for the TNN (2.49
◦
C
2
).
One possible improvement could be to include an
additional weighting for the target temperature when
calculating the loss during retraining of the pruned ar-
8
PyTorch Documentation, LSTM, https://pytorch.org/
docs/stable/generated/torch.nn.LSTM.html, Date accessed:
01/16/2024
0 5000 10000 15000 20000 25000
40
60
80
Ground Truth Permanent Magnet
TNN
TCN, 75% pruned
0 5000 10000 15000 20000 25000
20
30
40
50
60
70
Ground Truth Stator yoke
TNN
TCN, 75% pruned
0 5000 10000 15000 20000 25000
20
40
60
80
Ground Truth Stator Tooth
TNN
TCN, 75% pruned
0 5000 10000 15000 20000 25000
Sample
20
40
60
80
100
Ground Truth Stator Winding
TNN
TCN, 75% pruned
Temperature (°C)
Figure 3: Predictions of TNN and 75% pruned TCN for an
unseen temperature profile from the test data for the four
target temperatures.
chitecture, but this is beyond the scope of this work.
However, the average MSE over all four targets of the
TCN is still below that of the TNN; and at the pruning
rate of 75%, it achieves a speedup of 2.7× compared
to the TNN.
6.2 Approximation of Activation
Functions
Although the TNN requires very few parameters and
FLOPs, and still has comparable error rates to a 75%
pruned TCN, it takes much longer to compute. The
reason for this becomes apparent when looking at the
different types of operations used in the TNN (see
Fig. 4). The hyperbolic tangent and the sigmoid func-
tions take the most time (almost 70% of the over-
all execution time). This is despite the fact that we
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
72

24.9%
50.6%
20.7%
3.8%
0.81 ms
GEMM
Sigmoid
Tanh
Others
(a) TNN
75.4%
10.0%
3.1%
11.5%
0.26 ms
GEMM
Hardsigmoid
Hardtanh
Others
(b) TNN-H
S,T
Figure 4: Breakdown of the execution times for the required operations for the (a) TNN and (b) TNN-H
S,T
on a TC387. The
TNN operations hyperbolic tangent (tanh) and sigmoid take more than 70% of the computation time. With the approximated
activation functions (TNN-H
S,T
), the execution time is drastically reduced.
have integrated the float.h library to calculate the
exponential functions. We have therefore optimized
the TNN by replacing the hyperbolic tangent and sig-
moid functions with the hardtanh and hardsigmoid
functions supported by the pipeline, which is declared
TNN-H
S,T
in Fig. 4. This drastically speeds up the
execution by a factor of 3.1. However, this speedup
comes with a trade-off, as for some target tempera-
tures, the MSE increases significantly. Therefore, we
propose two additional models, TNN-H
T
and TNN-
H
S
, where we only approximate the tanh or sigmoid,
respectively. With this, the MSE is on par with TNN
while achieving a speedup of 1.23× for TNN-H
T
and
1.88× for TNN-H
S
. Nevertheless, the 75% pruned
TCN model still achieved a lower MSE and execution
time. In the future, one option to achieve a lower MSE
for approximated TNN-H
S,T
might be to increase the
model size to compensate for the loss in accuracy of
the approximated activation functions.
7 CONCLUSION
In this work, we presented a new approach for de-
ploying different types of neural networks on AURIX
TriCore (TC3xx) targets that are commonly used in
automotive systems. Apart from supporting not only a
restricted set of NNs such as CNNs, our approach pro-
vides means to compress and optimize a given model
to adjust memory consumption properly, as well as
to reduce the execution time during deployment. In
addition, we provide insights for developers design-
ing a neural network and planning to deploy it on
an automotive microcontroller. In a case study on
thermal electric motor management, we showed that
a conventional approach using a thermal neural net-
work (TNN), despite its expert design, has disadvan-
tages in terms of accuracy and especially execution
time when deployed on a target platform. NNs can
be used to provide accurate temperature estimations
from time series. In this regard, we evaluated TCNs
and TNNs using the workflow. The TNN consists of
many nodes with expensive activation functions (hy-
perbolic tangent and sigmoid), which require about
70% of the execution time on the TriCore. The con-
sidered TCNs do not require these types of activation
functions and still have the potential to reduce exe-
cution time further by applying pruning. The 75%
pruned TCN achieves a speedup of 2.7× compared to
the TNN. However, it is possible to additionally opti-
mize the TNNs, e.g., by approximating the activation
functions, which leads to a speedup of 3.1× but in-
creases the MSE significantly. A future direction here
could be to balance complex activation functions and
their less accurate counterparts, as well as to retrain
the model or increase the model size. In the future,
we plan to integrate cost models into the workflow
so that the developer can get an estimate of the exe-
cution time before deploying the models on a given
AURIX TriCore. This also paves the way for inves-
tigating automated search techniques (e.g., (Heidorn
et al., 2022; Heidorn et al., 2024)) for neural architec-
tures that aim for NNs with low execution time on the
microcontroller while maintaining low error rates.
ACKNOWLEDGEMENTS
This work was partially supported by the Schaeffler
Hub for Advanced Research at Friedrich-Alexander-
Universit
¨
at Erlangen-N
¨
urnberg (SHARE at FAU).
REFERENCES
Abadi, M., Agarwal, A., Barham, P., et al. (2015). Tensor-
Flow: Large-scale machine learning on heterogeneous
systems.
Alwani, M., Chen, H., Ferdman, M., and Milder, P. A.
(2016). Fused-layer CNN accelerators. In In Proceed-
Efficient Deployment of Neural Networks for Thermal Monitoring on AURIX TC3xx Microcontrollers
73

ings of the 49th Annual IEEE/ACM International Sym-
posium on Microarchitecture (MICRO), pages 22:1–
22:12. IEEE Computer Society.
Bai, J., Lu, F., Zhang, K., et al. (2019). ONNX: Open neural
network exchange.
Bunzel, S. (2011). AUTOSAR – The standardized software
architecture. Informatik Spektrum, 34(1):79–83.
Burrello, A., Garofalo, A., Bruschi, N., Tagliavini, G.,
Rossi, D., and Conti, F. (2021). DORY: Automatic
end-to-end deployment of real-world DNNs on low-
cost IoT MCUs. IEEE Transactions on Computers,
70(8):1253–1268.
Chen, T., Li, M., Li, Y., Lin, M., Wang, N., Wang, M., Xiao,
T., Xu, B., Zhang, C., and Zhang, Z. (2015). MXNet:
A flexible and efficient machine learning library for
heterogeneous distributed systems. The Computing
Research Repository (CoRR).
Chen, T., Moreau, T., Jiang, Z., Zheng, L., Yan, E. Q., Shen,
H., Cowan, M., Wang, L., Hu, Y., Ceze, L., Guestrin,
C., and Krishnamurthy, A. (2018). TVM: An auto-
mated end-to-end optimizing compiler for deep learn-
ing. In In Proceedings of the 13th USENIX Sympo-
sium on Operating Systems Design and Implementa-
tion (OSDI), pages 578–594. USENIX Association.
David, R., Duke, J., Jain, A., Reddi, V. J., Jeffries, N., Li,
J., Kreeger, N., Nappier, I., Natraj, M., Regev, S.,
Rhodes, R., Wang, T., and Warden, P. (2020). Ten-
sorFlow Lite Micro: Embedded machine learning on
TinyML systems. The Computing Research Reposi-
tory (CoRR).
Deutel, M., Woller, P., Mutschler, C., and Teich, J. (2022).
Energy-efficient deployment of deep learning applica-
tions on Cortex-M based microcontrollers using deep
compression. The Computing Research Repository
(CoRR).
Han, S., Mao, H., and Dally, W. J. (2016). Deep compres-
sion: Compressing deep neural network with pruning,
trained quantization and Huffman coding. In In Pro-
ceedings of 4th International Conference on Learning
Representations (ICLR).
Han, S., Pool, J., Tran, J., and Dally, W. J. (2015). Learning
both weights and connections for efficient neural net-
work. In In Proceedings of the Annual Conference on
Neural Information Processing Systems (NIPS), pages
1135–1143.
He, Y., Zhang, X., and Sun, J. (2017). Channel pruning for
accelerating very deep neural networks. In In IEEE
International Conference on Computer Vision (ICCV),
pages 1398–1406. IEEE Computer Society.
Heidorn, C., Hannig, F., and Teich, J. (2020). Design
space exploration for layer-parallel execution of con-
volutional neural networks on cgras. In Proceedings
of the 23rd International Workshop on Software and
Compilers for Embedded Systems (SCOPES), pages
26–31. ACM.
Heidorn, C., Meyerh
¨
ofer, N., Schinabeck, C., Hannig, F.,
and Teich, J. (2022). Hardware-aware evolutionary
filter pruning. In Embedded Computer Systems: Ar-
chitectures, Modeling, and Simulation - 22nd Inter-
national Conference, SAMOS 2022, Samos, Greece,
July 3-7, 2022, Proceedings, volume 13511 of Lecture
Notes in Computer Science, pages 283–299. Springer.
Heidorn, C., Sabih, M., Meyerh
¨
ofer, N., Schinabeck, C.,
Teich, J., and Hannig, F. (2024). Hardware-aware evo-
lutionary explainable filter pruning for convolutional
neural networks. International Journal of Parallel
Programming.
Kirchg
¨
assner, W., Wallscheid, O., and B
¨
ocker, J. (2021a).
Data-driven permanent magnet temperature estima-
tion in synchronous motors with supervised machine
learning: A benchmark. IEEE Transactions on Energy
Conversion, 36(3):2059–2067.
Kirchg
¨
assner, W., Wallscheid, O., and B
¨
ocker, J. (2021b).
Electric motor temperature.
Kirchg
¨
assner, W., Wallscheid, O., and B
¨
ocker, J. (2023).
Thermal neural networks: Lumped-parameter ther-
mal modeling with state-space machine learning.
Engineering Applications of Artificial Intelligence,
117:105537.
Lai, L. and Suda, N. (2018). Enabling deep learning at the
IoT edge. In In Proceedings of the International Con-
ference on Computer-Aided Design (ICCAD), page
135. ACM.
Li, H., Kadav, A., Durdanovic, I., Samet, H., and Graf, H. P.
(2017). Pruning filters for efficient ConvNets. In In
Proceedings of the 5th International Conference on
Learning Representations (ICLR). OpenReview.net.
Liberis, E., Dudziak, L., and Lane, N. D. (2021). µNAS:
Constrained neural architecture search for microcon-
trollers. In In Proceedings of the 1st Workshop on Ma-
chine Learning (EuroMLSys), pages 70–79. ACM.
Lin, J., Chen, W., Lin, Y., Cohn, J., Gan, C., and Han, S.
(2020). MCUNet: Tiny deep learning on IoT devices.
In In Proceedings of the Annual Conference on Neural
Information Processing Systems (NeurIPS).
Liu, C., Jobst, M., Guo, L., Shi, X., Partzsch, J., and Mayr,
C. (2023). Deploying machine learning models to
ahead-of-time runtime on edge using MicroTVM. The
Computing Research Repository (CoRR).
Ma, J. (2020). A higher-level Neural Network library on
Microcontrollers (NNoM).
MathWorks (2022). Statistics and machine learning tool-
box.
Novac, P., Hacene, G. B., Pegatoquet, A., Miramond, B.,
and Gripon, V. (2021). Quantization and deployment
of deep neural networks on microcontrollers. Sensors,
21(9):2984.
Paszke, A., Gross, S., Chintala, S., Chanan, G., Yang, E.,
DeVito, Z., Lin, Z., Desmaison, A., Antiga, L., and
Lerer, A. (2017). Automatic differentiation in Py-
Torch. In In Proceedings of NIPS Autodiff Workshop.
OpenReview.net.
Petersen, P., Rudolf, T., and Sax, E. (2022). A data-driven
energy estimation based on the mixture of experts
method for battery electric vehicles. In In Proceedings
of the 8th International Conference on Vehicle Tech-
nology and Intelligent Transport Systems (VEHITS),
pages 384–390. SCITEPRESS.
Qian, C., Ling, T., and Schiele, G. (2023). Energy efficient
LSTM accelerators for embedded FPGAs through pa-
rameterised architecture design. In In Proceedings of
the 36th International Conference on Architecture of
Computing Systems (ARCS), pages 3–17. Springer.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
74

Rotem, N., Fix, J., Abdulrasool, S., Deng, S., Dzhabarov,
R., Hegeman, J., Levenstein, R., Maher, B., Satish, N.,
Olesen, J., Park, J., Rakhov, A., and Smelyanskiy, M.
(2018). Glow: Graph lowering compiler techniques
for neural networks. The Computing Research Repos-
itory (CoRR).
Saha, S. S., Sandha, S. S., and Srivastava, M. B. (2022). Ma-
chine learning for microcontroller-class hardware: A
review. The Computing Research Repository (CoRR).
Sandler, M., Howard, A. G., Zhu, M., Zhmoginov, A.,
and Chen, L. (2018). MobileNetV2: Inverted resid-
uals and linear bottlenecks. In In IEEE Confer-
ence on Computer Vision and Pattern Recognition
(CVPR), pages 4510–4520. Computer Vision Founda-
tion / IEEE Computer Society.
Efficient Deployment of Neural Networks for Thermal Monitoring on AURIX TC3xx Microcontrollers
75
