
Vehicle Pose Estimation: Exploring Angular Representations
Ivan Orlov
1,2 a
, Marco Buzzelli
1 b
and Raimondo Schettini
1 c
1
Department of Informatics, Systems and Communication, University of Milano-Bicocca, Italy
2
Aramis Group, France
Keywords:
Vehicle Pose Recognition, Viewpoint Estimation, Car Azimuth Estimation, PASCAL3D+,
Angular Regression.
Abstract:
This paper addresses the challenge of azimuth estimation in the context of car pose estimation. Our re-
search utilizes the PASCAL3D+ dataset, which offers a diverse range of object categories, including cars,
with annotated azimuth estimations for each photograph. We introduce two architectures that approach az-
imuth estimation as a regression problem, each employing a deep convolutional neural network (DCNN)
backbone but diverging in their output definition strategies. The first architecture employs a sin-cos represen-
tation of the car’s azimuth, while the second utilizes two directional discriminators, distinguishing between
front/rear and left/right views of the vehicle. Our comparative analysis reveals that both architectures demon-
strate near-identical performance levels on the PASCAL3D+ validation set, achieving a median error of 3.5
◦
,
which is a significant advancement in the state of the art. The minimal performance disparity between the
two methods highlights their individual strengths while also underscoring the similarity in their practical ef-
ficacy. This study not only proposes effective solutions for accurate azimuth estimation but also contributes
to the broader understanding of pose estimation challenges in automotive contexts. The code is available at
https://github.com/ vani-or/car pose estimation.
1 INTRODUCTION
Pose detection revolves around the process of deter-
mining the position and orientation of specific parts
or features of an object or entity in images or videos.
Historically, the primary motivation for developing
pose detection algorithms was to detect and analyze
human body parts and their relative positions. Over
time, these methodologies have evolved and have
been adapted to cater to various objects, including
cars, enabling applications in fields as varied as an-
imation, augmented reality, sports analytics, and ve-
hicle damage assessment.
Early techniques employed to estimate pose made
use of part-based models, where individual parts of an
entity (like limbs in humans) were detected and then
assembled to deduce the overall pose (Felzenszwalb
and Huttenlocher, 2005).
Feature-based methods like Scale-Invariant Fea-
ture Transform (SIFT) (David, 2004) marked a sig-
nificant advancement in the field, moving beyond ba-
a
https://orcid.org/0000-0001-9600-8696
b
https://orcid.org/0000-0003-1138-3345
c
https://orcid.org/0000-0001-7461-1451
∗
Corresponding author
sic image processing techniques. In this era, geomet-
ric problems like the Perspective-n-Point (PnP) were
critical, where the objective was to deduce an object’s
pose from 2D-to-3D point correspondences (Lepetit
et al., 2009).
The rise of deep learning, and particularly CNNs,
brought a paradigm shift in pose detection methodolo-
gies. Unlike traditional methods, where features had
to be meticulously crafted, CNNs allowed for auto-
matic feature learning from data. Deep learning mod-
els, such as PoseNet (Kendall et al., 2015) and Mask
R-CNN (He et al., 2017), are representative examples
that have showcased the potential of CNNs in pose
estimation tasks.
This paper focuses on improving azimuth estima-
tion in car pose detection. Using the PASCAL3D+
dataset, it presents two architectures based on deep
convolutional neural networks, differing in their treat-
ment of azimuth: one uses a sin-cos representa-
tion, and the other employs directional discrimina-
tors. Both demonstrate advanced performance in pose
estimation. The paper is structured to first provide
background, followed by a problem definition, de-
tailed methodology, evaluation of results, and con-
cludes with discussions and future work.
Orlov, I., Buzzelli, M. and Schettini, R.
Vehicle Pose Estimation: Exploring Angular Representations.
DOI: 10.5220/0012574300003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 2: VISAPP, pages
853-860
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
853
2 RELATED WORKS
Deep learning, particularly CNNs, has significantly
advanced car pose estimation. Models like those in
(Mousavian et al., 2017) accurately predict 3D car
bounding boxes from 2D images. (Prokudin et al.,
2018) introduced a probabilistic model for angular
regression, enhancing accuracy and handling varying
image qualities. MonoGRNet (Qin et al., 2019) pro-
vides a unified approach for 3D vehicle detection and
pose estimation using monocular RGB images, while
(Xiao et al., 2019) developed a generic, flexible deep
pose estimation method.
Addressing training data scarcity and feature ex-
traction, (Su et al., 2015) combined image synthe-
sis and CNNs, and (Grabner et al., 2018) focused
on 3D pose estimation and model retrieval. Innova-
tive techniques like the characteristic view selection
model (CVSM) by (Nie et al., 2020) and a CNN-
based monocular orientation estimation integrating
Riemannian geometry by (Mahendran et al., 2018)
have been proposed.
Car pose estimation is vital in autonomous driv-
ing and insurance sectors, essential for understanding
vehicle orientation and assessing damages. It’s also
crucial in scenarios lacking direct sensor data, where
visual cues are pivotal (Geiger et al., 2012).
2.0.1 The PASCAL3D+ Dataset
Selecting an apt dataset is pivotal in guiding the re-
search process and ensuring the derived outcomes are
reflective of the research objectives. Previous work
(Buzzelli and Segantin, 2021) highlighted the impor-
tance of training data that faithfully model the ap-
plication scenario, specifically for the case of vehi-
cle analysis. For our investigation into car pose es-
timation, with a particular focus on azimuth estima-
tion, the PASCAL3D+ (Xiang et al., 2014) dataset
emerged as a front-runner. A driving factor behind
this choice was the detailed annotations the dataset
offers for each image, notably the azimuth values.
Azimuth estimation, a critical facet of pose detec-
tion, provides insights into an object’s orientation
within a 3D space, as detailed later on in section 3.
PASCAL3D+ alleviates the complexities of deriving
these angles by offering direct data for azimuth esti-
mation, ensuring a more precise and streamlined re-
search methodology.
The PASCAL3D+ dataset, an extension of the
PASCAL VOC dataset, augments the original im-
ages with intricate 3D annotations, laying the foun-
dation for 3D object detection and pose estimation
tasks. A prominent feature of this dataset is its com-
pilation of 5,475 car images, sourced directly from
ImageNet, presenting a myriad of scenarios for re-
searchers to explore. Each car in this dataset is metic-
ulously annotated with a corresponding 3D CAD
model, which enables researchers to juxtapose pose
estimations against a standardized 3D reference. For
cars, the annotations delve deep, offering viewpoints,
bounding boxes, and crucially, azimuth angles.
Several nuances make PASCAL3D+ a challeng-
ing yet rewarding dataset. The presence of occluded
objects simulates real-world complications that algo-
rithms need to account for. Furthermore, the dataset
showcases a wide variance in car makes and models,
capturing the diversity of the automotive world. How-
ever, it is essential to note that while the dataset offers
this diversity, it does not explicitly label the specific
makes or models.
3 DEFINING AND VISUALIZING
AZIMUTH
In the domain of vehicle pose detection, one of the
paramount tasks is the precise estimation of the vehi-
cle’s orientation in a given image or frame. The key
orientation parameter being focused upon in this re-
search task is the azimuth, often denoted as ϕ.
The azimuth, ϕ, is defined as the angle in the
range [−π,π] that represents the orientation of a ve-
hicle with respect to the viewer. Originating from the
front of the car, this angle describes how much the ve-
hicle has rotated from this frontal viewpoint. For in-
stance, ϕ = 0 would indicate a car directly facing the
viewer, while ϕ =
π
2
would signify the car turned 90
◦
to the right. This definition is depicted in Figure 1.
Figure 1: Azimuth ϕ definition for car pose estimation. In
this image, an azimuth of ϕ = −π/4 corresponds to the car
slightly turned to present its right side (passenger side) to-
wards the viewer. Angle 0 represents the reference axis for
this calculation.
It is noteworthy to mention the deliberate exclu-
sion of other viewpoint characteristics from this study,
such as elevation, distance, and the roll equivalent
from roll pitch and yaw. While these parameters can
offer further granularity to pose detection, the primary
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
854

focus here remains the continuous estimation of az-
imuth. When distilled to its essence, the problem
tackled in this research is one of regression. Instead of
the conventional classification-based approach where
discrete classes represent different poses or orienta-
tions, the goal here is continuous azimuth estimation.
This involves predicting a specific value of ϕ for a
given vehicle image. The advantage of this method is
that it allows for a much finer granularity of orienta-
tion prediction.
4 PROPOSED APPROACH
Vehicle pose estimation, especially focusing on the
azimuthal angle, is a multifaceted challenge. While
most regression tasks in deep learning provide con-
tinuous values within a predictable range, the angu-
lar nature of azimuth presents cyclic constraints that
require special consideration. Traditional regression
models would in fact treat angles such as ϕ = π and
ϕ = −π as distinct, ignoring their equality due to the
cyclic nature of angles.
In the context of this research, two distinct
methodologies have been adopted. The common ar-
chitecure is presented in Figure 2, with two different
heads corresponding to the two distinct methodolo-
gies, described in the following.
Figure 2: Proposed architecture, with Sin-Cos output repre-
sentation (top head) and Directional Discriminators output
representation (bottom head).
4.1 Sin-Cos Representation
One of the pivotal tasks in vehicle pose estimation
is to represent the azimuthal angle, ϕ, in a format
that can be effectively estimated using deep convolu-
tional neural networks (DCNNs). In addressing this,
our first proposed architecture adopts what is referred
to in (Beyer et al., 2015) as the “biternion” represen-
tation, a two-dimensional vector format comprising
the sine and cosine of ϕ. This format effectively ad-
dresses the challenge of azimuth representation as a
periodic variable in DCNNs.
Model Construction. The designed DCNN architec-
ture is partitioned into two primary segments. Ini-
tially, a backbone is utilized as an image feature de-
scriptor. This backbone captures intricate patterns and
details from the input images, converting them into a
condensed feature map. Following this feature extrac-
tion phase, a custom multi-layer perceptron (MLP)
is stacked atop the backbone. This MLP consists of
a hidden layer comprising 100 neurons, activated by
the Rectified Linear Unit (ReLU) function. To en-
hance generalization and curtail overfitting, a dropout
layer with a rate of 10% is integrated into the archi-
tecture (Srivastava et al., 2014).
Output Mechanism. The crux of this architecture
lies in its output mechanism. The network culminates
in two output neurons that are activated by the hy-
perbolic tangent (tanh) function. The tanh activation
ensures that the output values lie within the range [-1,
1], which aligns with the natural range of sine (sin(ϕ))
and cosine (cos(ϕ)) functions. Thus, these neurons
are adeptly designed to predict the sine and cosine
values of the azimuthal angle. Consequently, the es-
timated azimuth ϕ can be derived using the inverse
tangent function as:
ϕ = atan2(o
1
,o
2
), (1)
where o
1
and o
2
correspond to the outputs of the sine
and cosine neurons respectively.
Loss Function. The training process aims to optimize
the mean squared error (MSE) between the predicted
values and the true sine and cosine values. Mathemat-
ically, the loss L is represented as:
L =
1
N
N
∑
i=1
(o
1i
− y
1i
)
2
+ (o
2i
− y
2i
)
2
, (2)
where N is the number of samples, o
1i
and o
2i
are the
predicted sine and cosine values respectively, and y
1i
and y
2i
are the true sine and cosine values.
Azimuth Calculation from Sine and Cosine. To es-
timate the azimuth ϕ from the predicted sine and co-
sine outputs, the inverse tangent function, typically
represented as atan2, is employed. Given the nature
of this function, it is capable of determining the cor-
rect quadrant for the resulting angle based on the signs
of the sine and cosine values. Specifically:
ϕ = atan2(y
sin
,y
cos
). (3)
Drawbacks. While the Sin-Cos representation offers
a unique approach to tackle the cyclic nature of az-
imuth angles, it is not devoid of challenges. The most
significant is that the predicted sine and cosine val-
ues, when considered in isolation, do not guarantee a
resultant unit vector. Specifically, when reconstruct-
ing the azimuth using atan2(y
sin
,y
cos
), only one of the
sine or cosine values dominantly determines the resul-
tant angle, while the other mainly influences the sign
and quadrant determination. Thus, even if one value
Vehicle Pose Estimation: Exploring Angular Representations
855
is significantly off, it might not significantly affect the
angle’s magnitude but can change its direction. This
can lead to errors, especially when the predicted val-
ues drift away from forming a unit vector.
4.2 Directional Discriminators
To introduce more nuance and precision in the esti-
mation of the azimuthal angle, ϕ, the second archi-
tecture employs a distinctive double-discriminator ap-
proach. While it retains the same backbone as the first
architecture, it refines its head to present an innovative
mechanism for pose determination.
Output Interpretation. In contrast to the previ-
ous architecture, the network culminates in two out-
put neurons activated by the sigmoid function. This
choice ensures that the predictions are bounded within
[0, 1]. These outputs correspond to the normalized
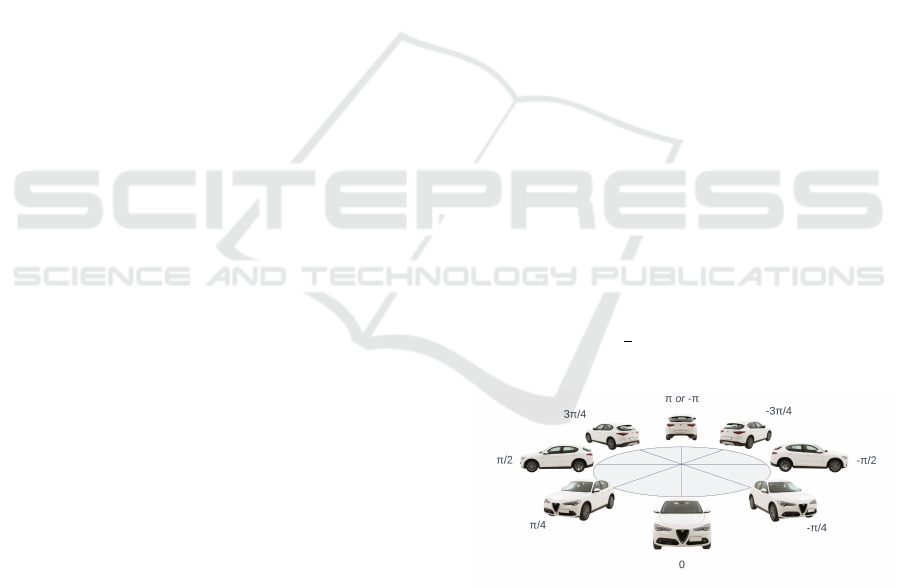
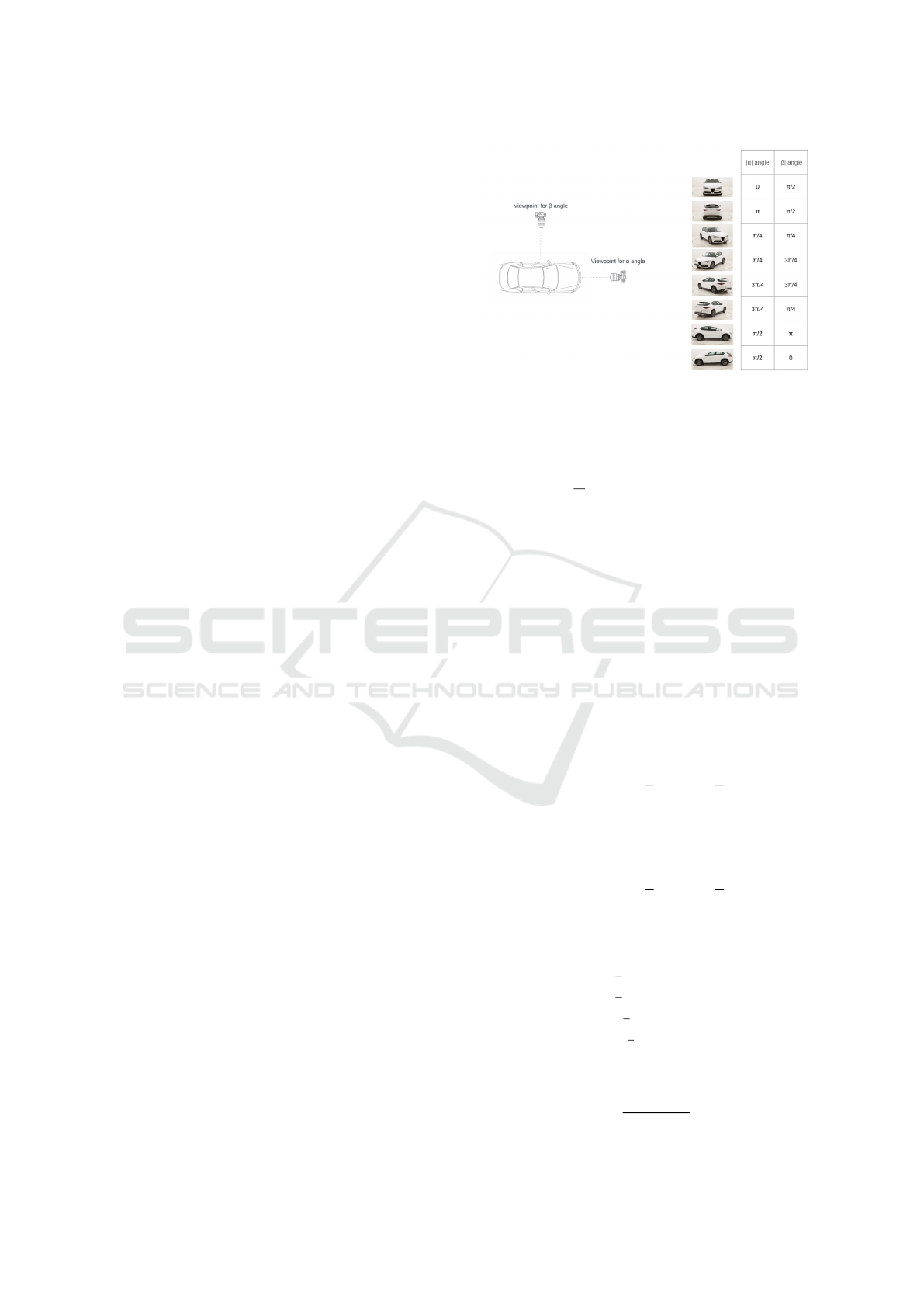
absolute values of two novel angles: α and β.
Alpha Discriminator (|α|). The α angle represents
the azimuthal view from the car’s front position.
Specifically:
• α = 0 depicts a direct frontal view of the car.
• α = π corresponds to a direct rear view.
• α = π/2 represents the left side view.
• α = −π/2 equates to the right side view.
Given the absolute interpretation |α|, it inherently
serves as a front/rear discriminator. However, this ab-
solute representation also forfeits its ability to distin-
guish between the car’s left and right sides.
Beta Discriminator (|β|). The β angle complements
α and serves a similar function but with different ref-
erence points:
• β = 0 signifies the car’s left side (driver’s seat)
view.
• β = π corresponds to the car’s right side (passen-
ger seat) view.
• β = π/2 indicates the car’s rear view.
• β = −π/2 represents the direct frontal view.
Being an absolute representation |β|, it naturally
acts as a left/right discriminator, but similarly loses
distinction between front and rear views.
A visualization is provided to elucidate these an-
gles and their orientation in Figure 3.
Loss Function. The network optimizes a composite
loss function derived from the binary cross-entropy
(BCE) loss for both α and β predictions. Formally,
the loss L is given by:
L = BCE(α
pred
,α
true
) + BCE(β
pred
,β
true
), (4)
Figure 3: On the left: viewpoints visualization for the α and
β angles. On the right: Viewpoint of a car and correspond-
ing values of |α| and |β|.
where the binary cross-entropy (BCE) is defined as:
BCE(y, ˆy) = −
1
N
N
∑
i=1
[y
i
log( ˆy
i
) + (1 − y
i
)log(1 − ˆy
i
)],
(5)
where y represents the true labels (ground truths), ˆy
denotes the predicted values from the network, and N
is the total number of samples.
Azimuth Calculation from the Sigmoids
Predictions. To estimate the azimuth ϕ from
the sigmoid outputs, it is necessary to transform these
outputs to angles within the range [0, π].
α
abs
,β
abs
= y
sigmoids
× π (6)
Here, α
abs
and β
abs
represent the absolute angles
corresponding to the front/rear and left/right discrim-
inators, respectively. The next step is to determine the
specific quadrant of the azimuth angle based on the
values of α
abs
and β
abs
:
Q
1
↔ α
abs
<
π
2
∧ β
abs
<
π
2
, (7)
Q
2
↔ α
abs
≥
π
2
∧ β
abs
<
π
2
, (8)
Q
3
↔ α
abs
≥
π
2
∧ β
abs
≥
π
2
, (9)
Q
4
↔ α
abs
<
π
2
∧ β
abs
≥
π
2
. (10)
Having determined the quadrant, it is necessary
to compute the secondary angle, α
2,β
, based on the
quadrant and the value of α
abs
and β
abs
:
α
2,β
=
π
2
− β
abs
, if Q
1
.
π
2
+ β
abs
, if Q
2
.
3
π
2
− β
abs
, if Q
3
.
−
π
2
+ β
abs
, if Q
4
.
(11)
The mean angle,
¯
α, is then computed by averaging
α
abs
and α
2,β
:
¯
α =
α
abs
+ α
2,β
2
. (12)
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
856

Lastly, the azimuth ϕ is obtained by adjusting the
sign of
¯
α based on the quadrant:
ϕ =
¯
α × (−1)
δ(Q
3
∨Q
4
)
, (13)
where δ is the Kronecker delta function, which as-
signs a value of 1 if either condition Q
3
or Q
4
is true,
and 0 otherwise.
Drawbacks. The introduction of two discriminators
for azimuth representation can make the network’s
prediction mechanism less intuitive and more intricate
than the more direct sin-cos representation. More-
over, by utilizing absolute values and confining out-
puts to the range [0, π], there is potential for a loss
of precision in angle estimation, especially when the
real angle hovers near the defined boundaries.
4.3 Evaluation Method
Viewpoint estimation, especially for automobile ori-
entation, distinguishes itself from traditional classifi-
cation tasks by predicting a continuous variable in-
stead of categorical outputs. In this work, by de-
composing the target into two variables (e.g., sin/cos
or alpha/beta), it is possible to employ classical re-
gression error metrics for evaluation. Therefore, be-
sides the commonly used Median Error (MedErr) and
Accuracy within π/6 (Acc
π/6
), regression evaluation
metrics like Mean Absolute Error (MAE), Root Mean
Square Error (RMSE), and the coefficient of determi-
nation (R
2
) have been incorporated, given their signif-
icance in assessing models yielding continuous pre-
dictions.
4.4 Training
4.4.1 Data Preparation
Dataset Split. The PASCAL3D+ dataset, which
was employed for this research, inherently provides
a train/validation split. The total number of images
in the dataset amounts to 5,475. Of these, 2,763 be-
long to the training set, while 2,712 are earmarked for
validation, representing a nearly even 50/50 split.
Data Augmentation. To boost the robustness of the
trained models and to mitigate overfitting, an array of
data augmentation techniques was integrated into the
pipeline:
• Rotation. Images were rotated with a random an-
gle constrained to a maximum of 10
◦
.
• Barrel/Pincushion Distortions. These were intro-
duced to simulate lens distortions.
• Brightness and Contrast Adjustments. Random
adjustments were made to image brightness and
contrast levels.
• Horizontal Flips. Images were horizontally
flipped. It is essential to note that the azimuth an-
gle needs adjustment when flipping.
Azimuth Adjustment for Horizontal Flips. When
an image is flipped horizontally in the Sin-Cos ap-
proach, the sine value of the azimuth changes its sign
while the cosine value remains the same. Given the
original pose [sin(ϕ),cos(ϕ)], the adjusted pose after
a horizontal flip becomes:
[ −sin(ϕ), cos(ϕ) ]. (14)
In the Directional Discriminators approach, the
value for α remains unchanged after the horizontal
flip, but the value for β is subtracted from 1. Given
the original pose [α,β], the adjusted pose post hori-
zontal flip becomes:
[ α, 1 − β ]. (15)
Network Backbone. For the neural network back-
bone, the EfficientNetB0 architecture (Tan and
Le, 2019) was chosen, pre-trained on ImageNet
dataset (Russakovsky et al., 2015). EfficientNetB0
is acknowledged for delivering state-of-the-art perfor-
mance while maintaining a relatively compact model
size. Its design philosophy makes it an ideal choice
for this research, ensuring efficient training without
compromising accuracy.
4.4.2 Training Parameters & Hardware
Configuration
The training process was governed by the following
parameters:
• Learning Rate: 5 × 10
−3
;
• Optimizer: Adam;
• Learning Rate Decay: 0.96;
• Batch Size: 32.
The models were trained for a maximum of 50
epochs. However, an early stopping mechanism was
integrated to halt training if the validation perfor-
mance did not improve for 7 consecutive epochs (pa-
tience parameter).
The training was facilitated on a hardware setup
powered by an Nvidia Tesla T4 GPU, ensuring swift
and efficient computation throughout the training pro-
cess.
Vehicle Pose Estimation: Exploring Angular Representations
857

5 RESULTS
5.1 Quantitative Results
The quantitative assessment of the viewpoint estima-
tion performance comprises two tables. Table 1 pro-
vides a detailed performance evaluation of the pro-
posed methods using all five metrics—Median Error,
Accuracy within π/6, Mean Absolute Error (MAE),
Root Mean Square Error (RMSE), and R
2
. In con-
trast, Table 2 exclusively compares the proposed
methodologies on the PASCAL3D+ category-specific
viewpoint estimation for cars with several state-of-
the-art methods using the two metrics that are widely
reported in existing literature.
Table 1: Comprehensive Performance Metrics for View-
point Estimation Methods.
Approach MAE RMSE R
2
Acc
π/6
MedErr
Sin-Cos 7.3 14.8 0.95 0.97 3.5
Directional Discriminators 7.2 14.5 0.95 0.97 3.4
• Comprehensive Performance Assessment. Ta-
ble 1 showcases the full breadth of performance
metrics for both of the described methodologies.
The Directional Discriminators approach demon-
strates a slightly superior performance with an
MAE of 7.2, RMSE of 14.5, and R
2
of 0.95. In
comparison, the Sin-Cos representation achieves
an MAE of 7.3, RMSE of 14.8, and an equivalent
R
2
score of 0.95.
• Benchmark Achievement. Both of the presented
methodologies—the Sin-Cos representation and
the Directional Discriminators approach — sur-
pass all the prior methods documented. Remark-
ably, both of the described methods reach an
Acc
π/6
score of 0.97, which stands as the top per-
formance among the evaluated techniques. Fur-
ther emphasizing the accuracy of the proposed
methods, the MedErr metric—which gauges the
median error—registers its lowest values for the
discussed approaches. The Directional Discrim-
inators leads with a MedErr of 3.4, closely fol-
lowed by the Sin-Cos representation at 3.5.
• Intra-Comparison of the Two Approaches. A
side-by-side examination of the two techniques
reveals closely aligned results. The Directional
Discriminators slightly outperforms the Sin-Cos
representation in terms of MedErr. Nonetheless,
the difference is a mere 0.1, which, in practical
applications, might fall within an acceptable mar-
gin of error. This tight competition underscores
the robustness and reliability of both approaches.
• Residuals Analysis. One powerful diagnostic
tool to assess the accuracy and reliability of the
viewpoint prediction model is to inspect the dis-
tribution of residuals — the differences between
the observed orientations and their predicted val-
ues. For a given true orientation ϕ and its pre-
dicted orientation
ˆ
ϕ, the residual r is given by:
r = ϕ −
ˆ
ϕ. (16)
The histogram of residuals for the Directional
Discriminators, shown in Table 4 approach re-
veals a compellingly centered distribution around
0, indicating a generally accurate prediction by
the model.
However, the presence of non-zero residuals in
extreme intervals such as r < −150
◦
and r > 150
◦
signifies occasional outlier predictions. These
outliers emphasize that, despite the model’s over-
all strong performance, there remains room for
further refinement. Such sporadic, significantly
erroneous predictions underscore the need for on-
going research to perfect the model and minimize
these anomalies.
Table 2: Results on PASCAL3D+ category-specific view-
point estimation (car). Acc
π/6
measures accuracy (the
higher the better) and MedErr measures error (the lower the
better).
Method Acc
π/6
MedError
(Prokudin et al., 2018) 0.91 4.5
(Su et al., 2015) 0.88 6.0
(Mousavian et al., 2017) 0.90 5.8
(Tulsiani and Malik, 2015) 0.90 8.8
(Pavlakos et al., 2017) - 5.5
(Grabner et al., 2018) 0.94 5.1
3DPoseLite (Dani et al., 2021) 0.92 -
(Xiao et al., 2019) 0.91 5.0
(Klee et al., 2023) - 4.9
(Nie et al., 2020) 0.92 5.1
(Mahendran et al., 2018) 0.95 4.5
Ours (Sin-Cos) 0.97 3.5
Ours (Directional Discriminators) 0.97 3.4
Figure 4: Residuals distribution for the Directional Dis-
criminators approach.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
858

5.2 Qualitative Results
PASCAL3D+ Validation Set. Figure 5 presents a
5 × 5 grid showcasing predictions made on the vali-
dation set of the PASCAL3D+ dataset. Each image in
this grid is accompanied by an azimuth diagram sit-
uated at the right top corner, in which the predicted
azimuth is marked with a red line while the ground
truth is indicated by a green line. A closer inspection
of the images reveals the striking proximity between
the predicted and actual orientations across the major-
ity of samples, highlighting the model’s effectiveness.
However, it is essential to recognize instances like
the sample in the second row and third column where
the divergence between the prediction and the ground
truth is nearly 30
◦
. Contrary to initial impressions,
this deviation does not necessarily reflect an inaccu-
racy in the model. Upon closer inspection, it becomes
evident that the ground truth provided for this partic-
ular image does not align seamlessly with the actual
orientation of the car, hinting at occasional noise and
inconsistencies in the PASCAL3D+ dataset. Such ob-
servations underline the importance of maintaining a
critical approach when evaluating predictions, espe-
cially in the context of potentially noisy datasets.
Internet-Sourced Images. The versatility and gen-
eralizability of the proposed model are further demon-
strated in Figure 6. This figure showcases a 5 ×5 grid
of car images sourced from the internet, beyond the
boundaries of the PASCAL3D+ dataset. As these im-
ages come without any associated ground truth, only
the predicted azimuth, denoted by a red line, is illus-
trated on the azimuth diagrams. Notably, even in the
absence of ground truth for comparison, the predic-
tions appear highly plausible, resonating well with the
visual orientations of the cars.
An intriguing observation from this set is the im-
age located in the first column and fourth row, where a
car is obscured by a car cover. Despite this blanket ob-
scuring the intricate details and distinctive features of
the vehicle, the model still manages to deduce the az-
imuth quite accurately. This exemplifies the model’s
ability to generalize and make predictions based on
broad contextual cues, even when faced with uncon-
ventional scenarios.
Model Interpretability and Utility. Visual results,
as presented in the aforementioned figures, are vital
for offering an intuitive sense of model performance.
They not only establish confidence in the model’s
quantitative metrics but also showcase its utility in
real-world, diverse scenarios. Moreover, such qualita-
tive results facilitate potential troubleshooting and re-
Figure 5: Sample predictions on the PASCAL3D+ valida-
tion set. Red and green lines on the azimuth diagrams corre-
spond to predicted and ground truth azimuths, respectively.
Figure 6: Sample predictions on car images sourced from
the internet. Only the predicted azimuth (red line) is de-
picted due to the absence of ground truth.
finement strategies by revealing situations where the
model might underperform or when external factors,
like dataset noise, come into play.
6 CONCLUSIONS
This study has introduced two methods for car az-
imuth estimation, utilizing the sinusoidal properties
Vehicle Pose Estimation: Exploring Angular Representations
859

of orientations and directional discriminators. Both
methods demonstrated state-of-the-art performance
on the PASCAL3D+ dataset, with minimal perfor-
mance differences under certain conditions, high-
lighting their practical applicability.
In terms of potential improvements, exploring a
range of data augmentation techniques could enhance
model robustness, particularly in real-world scenar-
ios. Additionally, accuracy might be further refined
by employing model ensembling to combine predic-
tions from various models or iterations, thereby re-
ducing the impact of outlier predictions.
ACKNOWLEDGMENTS
This work was partially supported by the MUR under
the grant “Dipartimenti di Eccellenza 2023-2027” of
the Department of Informatics, Systems and Commu-
nication of the University of Milano-Bicocca, Italy.
REFERENCES
Beyer, L., Hermans, A., and Leibe, B. (2015). Biternion
nets: Continuous head pose regression from discrete
training labels. In German Conference on Pattern
Recognition, pages 157–168. Springer.
Buzzelli, M. and Segantin, L. (2021). Revisiting the
compcars dataset for hierarchical car classification:
New annotations, experiments, and results. Sensors,
21(2):596.
Dani, M., Narain, K., and Hebbalaguppe, R. (2021).
3DPoseLite: A compact 3D pose estimation using
node embeddings. In Proceedings of the IEEE/CVF
Winter Conference on Applications of Computer Vi-
sion, pages 1878–1887.
David, L. (2004). Distinctive image features from scale-
invariant keypoints. International journal of computer
vision, 60:91–110.
Felzenszwalb, P. F. and Huttenlocher, D. P. (2005). Pic-
torial structures for object recognition. International
journal of computer vision, 61:55–79.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? The KITTI vision bench-
mark suite. In IEEE conference on computer vision
and pattern recognition.
Grabner, A., Roth, P. M., and Lepetit, V. (2018). 3D
pose estimation and 3D model retrieval for objects in
the wild. In Proceedings of the IEEE conference on
CVPR, pages 3022–3031.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask R-CNN. In Proceedings of the IEEE ICCV,
pages 2961–2969.
Kendall, A., Grimes, M., and Cipolla, R. (2015). Posenet: A
convolutional network for real-time 6-DoF camera re-
localization. In Proceedings of the IEEE international
conference on computer vision, pages 2938–2946.
Klee, D. M., Biza, O., Platt, R., and Walters, R.
(2023). Image to sphere: Learning equivariant fea-
tures for efficient pose prediction. arXiv preprint
arXiv:2302.13926.
Lepetit, V., Moreno-Noguer, F., and Fua, P. (2009). Ep n
p: An accurate o (n) solution to the p n p problem.
International journal of computer vision, 81:155–166.
Mahendran, S., Lu, M. Y., Ali, H., and Vidal, R. (2018).
Monocular object orientation estimation using Rie-
mannian regression and classification networks. arXiv
preprint arXiv:1807.07226.
Mousavian, A., Anguelov, D., Flynn, J., and Kosecka, J.
(2017). 3D bounding box estimation using deep learn-
ing and geometry. In Proceedings of the IEEE con-
ference on Computer Vision and Pattern Recognition,
pages 7074–7082.
Nie, W.-Z., Jia, W.-W., Li, W.-H., Liu, A.-A., and Zhao,
S.-C. (2020). 3D pose estimation based on reinforce-
ment learning for 2D image-based 3D model retrieval.
IEEE Transactions on Multimedia, 23:1021–1034.
Pavlakos, G., Zhou, X., Chan, A., Derpanis, K. G., and
Daniilidis, K. (2017). 6-DoF object pose from seman-
tic keypoints. In 2017 IEEE international conference
on robotics and automation, pages 2011–2018.
Prokudin, S., Gehler, P., and Nowozin, S. (2018). Deep di-
rectional statistics: Pose estimation with uncertainty
quantification. In Proceedings of the European con-
ference on computer vision (ECCV), pages 534–551.
Qin, Z., Wang, J., and Lu, Y. (2019). Monogrnet: A geo-
metric reasoning network for monocular 3D object lo-
calization. In Proceedings of the AAAI Conference on
Artificial Intelligence, volume 33, pages 8851–8858.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., et al. (2015). Imagenet large scale visual
recognition challenge. International journal of com-
puter vision, 115:211–252.
Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. (2014). Dropout: a simple way
to prevent neural networks from overfitting. The jour-
nal of machine learning research, 15(1):1929–1958.
Su, H., Qi, C. R., Li, Y., and Guibas, L. J. (2015). Render
for cnn: Viewpoint estimation in images using cnns
trained with rendered 3D model views. In Proceedings
of the IEEE international conference on computer vi-
sion, pages 2686–2694.
Tan, M. and Le, Q. (2019). Efficientnet: Rethinking model
scaling for convolutional neural networks. In Interna-
tional conference on machine learning, pages 6105–
6114. PMLR.
Tulsiani, S. and Malik, J. (2015). Viewpoints and keypoints.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 1510–1519.
Xiang, Y., Mottaghi, R., and Savarese, S. (2014). Beyond
pascal: A benchmark for 3D object detection in the
wild. In IEEE winter conference on applications of
computer vision, pages 75–82. IEEE.
Xiao, Y., Qiu, X., Langlois, P.-A., Aubry, M., and Marlet, R.
(2019). Pose from shape: Deep pose estimation for ar-
bitrary 3D objects. arXiv preprint arXiv:1906.05105.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
860
