
Pseudo-Curvature of Fractal Curves for Geometric Control of Roughness
Mohamad Janbein
a
, Christian Gentil
b
, C
´
eline Roudet
c
and Clement Poull
d
Laboratoire d’Informatique de Bourgogne (LIB), Universit
´
e de Bourgogne, 9 Av. Alain Savary, 21000 Dijon, France
Keywords:
Curve, Fractal Geometry, Iterated Function System (IFS), Nowhere Differentiability, Tangent, Curvature.
Abstract:
Fractal geometry is a valuable formalism for synthesizing and analyzing irregular curves to simulate non-
smooth geometry or roughness. Understanding and controlling these geometries remains challenging because
of the complexity of their shapes. This study focuses on the curvature of fractal curves defined from an Iter-
ated Function System (a set of contractive operators). We introduce the Differential Characteristic Function
(DCF), a new tool for characterizing and analyzing their differential behavior. We associate a family of DCF
to the fixed point of each operator. For each dyadic point of the curve, there exist left and right families of DCF
inducing left and right ranges of curvatures: the pseudo-curvatures. A set of illustrations shows the influence
of these pseudo-curvatures on the geometry of fractal curves. We propose a first approach for applying our
results to roughness generation and control.
1 INTRODUCTION
Rough curves and surfaces have gained prominence
in fields like quality control, computer-aided design,
and computer graphics. They are utilized for di-
verse applications such as generating coherent ter-
rains (Fournier et al., 1982; Warszawski et al., 2019),
creating textures (Wang et al., 2021), or simulating
their effects to replicate the light-matter interactions
(Stam, 2001; Walter et al., 2007; Chermain et al.,
2021) without adding geometric complexity.
There are different ways to produce roughness. In
mathematics, roughness denotes irregularity in non-
differentiable context. Quantifying such irregularity
is established using mathematical constructs, like the
Lipschitz coefficient and the H
¨
older coefficient in its
various forms, pointwise, local, or global. Rough
curves were first introduced by Bolzano (Bolzano,
1851; Thim, 2003), Weierstrass (Hardy, 1916) and
Takagi (Allaart and Kawamura, 2012; Allaart and
Kawamura, 2010). They follow an iterative construc-
tion, creating new details with decreasing amplitude
related to the increasing frequency. This construc-
tion process results in a self-similar property related
to fractal geometry (Mandelbrot, 1977), and fractal
dimensions (Nayak et al., 2019). Another approach
a
https://orcid.org/0000-0003-3271-0712
b
https://orcid.org/0000-0002-0343-3456
c
https://orcid.org/0000-0002-0704-081X
d
https://orcid.org/0000-0002-4402-2928
to producing rough phenomena is to use statistical
models. For example, the pioneer Perlin noise (Per-
lin, 1985) can produce rough-looking constructs with
a high enough octave. However, many of these proce-
dural noise models lack global control.
Designing and controlling the geometry of rough
curves and surfaces is challenging. This paper aims to
enrich the understanding of differential properties of
fractal curves by studying curvature to provide tools
for later designing and controlling rough curves and
surfaces. Roughness is characterized by irregulari-
ties (differential behavior), often associated with self-
similarity. Consequently, fractals offer an appropriate
framework for studying phenomena related to rough-
ness and irregularity. Deterministic is also essen-
tial for accurate controls and continuous dependency
between parameters and resulting geometry. Conse-
quently, we focus on fractal deterministic curves.
We review some related work in section 2. We
focus on deterministic fractal curves defined by Iter-
ated Function Systems (IFS) (Hutchinson, 1981) and
projected IFS, as explained in section 3. Section 4
introduces the differential characteristic function, a
new tool to analyze the differential behavior of fractal
curves. Section 5 shows how the differential char-
acteristic functions can be used to obtain known re-
sults about the tangent of a fractal curve. In section 6,
we analyze the curvature at each fixed point from its
associated family of differential characteristic func-
tions, and we define the pseudo curvature of a fractal
Janbein, M., Gentil, C., Roudet, C. and Poull, C.
Pseudo-Curvature of Fractal Curves for Geometric Control of Roughness.
DOI: 10.5220/0012574800003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 177-188
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
177

curve. Finally section 7 discusses applying our results
to roughness design and generation.
2 RELATED WORK
The automatic generation (for our purpose, geome-
tries) implies having specifications, generally ex-
pressed in terms of expected properties or characteris-
tic values. Of course, these specifications have to de-
pend on the generator parameters. The nature of this
dependency and its accessibility are central to having
an intuitive control or facilitating the specification de-
scription.
Numerous studies deal with this question using
spectral analysis to generate noises (fractal-based,
colored noises, convolution noise) (Perlin, 1985;
Cook and DeRose, 2005; Lagae et al., 2009; Gilet
et al., 2014; Pavie, 2016; Cavalier et al., 2019; Hu
and Tonder, 1992; Wang et al., 2021; P
´
erez-R
`
afols
and Almqvist, 2019). However, most need spec-
tral control, which is only apparent with minimum
knowledge. Other studies focus on the differential
properties of random rough curves. In tribology, the
contact area between two rough surfaces is analyzed
from the curvature. Nowicki (Nowicki, 1985) lists
and discusses numerous parameters for evaluating,
analyzing, and modeling surface roughness. Some
were concerned about differential properties like peak
shapes, slope means, number of inflection points, and
RMS of the profile slope, radius of asperity, and cur-
vature radius. However, he only provides standard
definitions for smooth curves without considering the
numerical trouble caused by the irregularity of rough
curves. Moalic et al. (Moalic et al., 1987) outline
errors arising in the computation of slopes and cur-
vatures statistical characteristics (mean, variance) for
actual sampled surface. The tested methods by or-
der of decreasing error are the finite difference meth-
ods (Whitehouse, 1982), the autospectrum approach,
and the Fourier transform computation. However, all
these methods evaluate the characteristics on aver-
age. Bigerelle et al. (Bigerelle et al., 2013) propose
a method to calculate the curvature at any point of
a random rough curve by considering the statistical
self-similarity (fractal) property.
To eliminate the uncertainty of the randomness,
some authors focus on deterministic curves. Daoudi
et al. (Daoudi et al., 1998) construct nowhere dif-
ferentiable continuous functions from prescribed lo-
cal H
¨
older regularity at each point. However, the
H
¨
older irregularity is a complex notion. Bensoudane
and Podokorytov (Bensoudane et al., 2009; Podkory-
tov, 2013) focus on curves built with IFS and show
that it is possible to define left and right tangents even
if the curve is nowhere differentiable. In some config-
urations, tangents are not defined, but the differential
behavior is described by defining pseudo-tangents.
These studies have shown accuracy brought by deter-
ministic models. Pseudo-tangents are an interesting
geometric tool for controlling roughness, but they are
insufficient to manage the complexity of such curves.
A second-order differential characteristic is expected.
3 BACKGROUND
An Iterated Function System (IFS) is a finite set of
contractive operators
{
T
i
}
I−1
i=0
that act on a complete
metric space (X,d). For a given IFS, there exists
a unique non-empty compact set A of (X,d) satis-
fying the self-similarity property: A =
S
I−1
i=0
T
i
(A).
Note that each operator T
i
maps A onto a part of it-
self. A is called the attractor of the IFS. We com-
pute it using the Hutchinson operator T, defined by
T(K) =
S
I−1
i=0
T
i
(K), with K ∈ H(X), the set of all
non-empty compact subsets of X. The attractor A can
be obtained as the limit of an iterative process, given
by A = lim
i→+∞
T
i
(A).
Zair and Tosan (Zair and Tosan, 1996) and
Schaefer (Schaefer et al., 2005) introduced the pro-
jected IFS model to create free-form fractal shapes
that can be deformed by changing the positions
of a set of N control points P = {P
0
,.. .,P
N−1
}.
The attractor is defined in the barycentric space
BI
N
=
n
α ∈ R
N
|
∑
N−1
j=0
α
j
= 1,α = (α
0
,...,α
N−1
)
T
o
(Figure 1 left). Each point of A ⊂ BI
N
is inter-
preted as a set of weights w.r.t. the control points.
The attractor is then projected onto the modeling
space according to a set of control points P: PA =
n
p ∈ X, p =
∑
N−1
j=0
α
j
P
j
: α ∈ A
o
(see Figure 1 right).
This construction is similar to B
´
ezier curves defi-
nition, where the Bernstein polynomial functions are
defined in BI
N
and then projected according to the
set of control points: C(t) =
∑
N−1
j=0
B
j
(t)P
j
. Note that
B
´
ezier (resp. NURBS) curves can be modeled using
projected IFS (Zair and Tosan, 1996) (resp. C-IFS
(Morlet et al., 2019)).
For the rest of the paper, all operators are con-
tractive affine operators acting on BI
N
. We consider
the barycentric space BI
N
as an hyperplane of the
affine space R
N
, with the coordinate system of ori-
gin O = (0, ... ,0) and basis vectors (e
0
,.. .,e
N−1
)
where the j
th
component of the N-dimensional vector
(e
i
)
j
= δ
i j
, where δ
i j
designates the Kronecker delta.
The associated vector space of BI
N
is the set of vec-
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
178

Figure 1: Left: Takagi attractor A built in the barycentric
space BI
3
, where {e
0
,e
1
,e
2
} are the canonical basis vec-
tors. Right: projection of the attractor A of the left figure
according to the set of control points
{
P
0
,P
1
,P
2
}
.
tors BI
N
=
n
v ∈ R
N
|
∑
N−1
j=0
v
j
= 0
o
. Consider an IFS
{
T
i
}
I−1
i=0
, for each operator T
i
: BI
N
→ BI
N
, there ex-
ists a linear operator T
i
: BI
N
→ BI
N
such that:
T
i
(x + v) = T
i
(x) + T
i
(v) (1)
for any x ∈ BI
N
and any v ∈ BI
N
. Each operator T
i
must be internal (a point of BI
N
is mapped onto BI
N
).
As a consequence, their matrix form, expressed in the
coordinate system (O,e
0
,.. .,e
N−1
), are N × N matri-
ces with column’s sum equals 1 (T
i
have the same
matrix form as T
i
). Because of the constraint on the
sum of each column, such matrices have 1 as eigen-
value. To be contractive, the remaining eigenvalues
must have their modulus lesser than 1. For an opera-
tor T
i
, we adopt the following notation for its eigen-
values and eigenvectors: (λ
0
i
= 1,λ
1
i
,.. .,λ
N−1
i
) and
(v
0
i
,v
1
i
,.. .,v
N−1
i
), respectively, where eigenvalues are
arranged in decreasing modulus (upper index). The
first eigenvector v
0
i
(not in bold), associated to λ
0
i
= 1,
corresponds to the fixed point, denoted by c
i
. The
sum of its components equals 1, meaning it is a point
of BI
N
. The other eigenvectors have the sum of their
coordinates equal to zero, indicating that these eigen-
vectors are vectors. For example, we can consider the
matrices of de Casteljau, which are used in the calcu-
lation of B
´
ezier curves:
T
0
=
1 1/2 1/4
0 1/2 1/2
0 0 1/4
, T
1
=
1/4 0 0
1/2 1/2 0
1/4 1/2 1
The attractor of the associated IFS is the Bernstein poly-
nomial function of degree 2 lying in BI
3
.
With projected IFS, controlling the topology of such
objects is challenging. An extension, named Boundary
Controlled Iterated Function System (BC-IFS) (Sokolov
et al., 2015; Gentil et al., 2021), provides a control of
the attractor topology with incidence and adjacency con-
straints. Ensuring the C
(0)
continuity for curves is equiv-
alent to applying the well-known constraints for Fractal
Interpolation Functions (FIF) (Barnsley, 2014). We con-
sider an IFS composed of two operators T
0
and T
1
that
builds an attractor in BI
3
(as in Figure 2). The attrac-
tor is then projected onto the modeling space using three
control points {P
0
,P
1
,P
2
} defined in R
2
. The operator
T
0
maps all the curve to the red part of the curve, and T
1
maps it into the green part, so to guarantee that the two
parts are connected, we impose the adjacency constraint
for C
(0)
: T
0
c
1
= T
1
c
0
, where the fixed points c
0
and c
1
are the left and right endpoints of the curve respectively
(see Figure 2).
Figure 2: Adjacency constraint for C
(0)
continuity: T
0
c
1
=
T
1
c
0
is imposed for the IFS composed of T
0
and T
1
to guar-
antee the connectivity of the fractal curve at the joining
point, the curve is then projected into the modeling space
with control points
{
P
0
,P
1
,P
2
}
.
We define dyadic points, on which we compute the
pseudo-curvature as following: p ∈ A is a dyadic point
if there exists a finite sequence of indices σ
0
,σ
1
,...,σ
l
(where σ
i
∈ {0, ...,I − 1} and σ
l−1
̸= σ
l
) s.t. p =
T
σ
0
T
σ
1
...T
σ
l−1
c
σ
l
.
4 CHARACTERIZATION OF
ITERATIVE BEHAVIORS
The main idea of this paper is to consider an attractor as a
set of sequences. We know that each T
i
has a fixed point
c
i
belonging to the attractor. By applying T
i
iteratively
on the fixed point c
k
of another operator T
k
, we define a
sequence of points converging to c
i
, each element of the
sequence belonging to the attractor.
This section introduces the differential characteris-
tic function (DCF) to formalize and simplify these se-
quences’ behavior.
4.1 Elementary Iterative Behavior of
One Operator
Consider an internal contractive operator T (of an IFS
defining a curve) acting on BI
3
, (λ
0
= 1,λ
1
,λ
2
) its eigen-
values, (v
0
= c, v
1
,v
2
) its eigenvectors and q
0
a point of
BI
3
.
We define the sequence {q
n
}
n∈N
by: q
n
= T
n
q
0
. Each
term of this resulting sequence can be expressed in the
coordinate system {c,v
1
,v
2
}:
q
0
= c + x
1
v
1
+ x
2
v
2
, where x
1
,x
2
∈ R (2)
T
n
q
0
= T
n
c + T
n
(x
1
v
1
+ x
2
v
2
) (3)
T
n
q
0
= c + x
1
(λ
1
)
n
v
1
+ x
2
(λ
2
)
n
v
2
(4)
Pseudo-Curvature of Fractal Curves for Geometric Control of Roughness
179

To gain insight into the differential properties of the
curve, we need to analyze the different behaviors of
the sequence {q
n
}
n∈N
w.r.t. the eigensystem of T . To
see clearly these behaviors, we project the sequence of
points T
n
q
0
onto the modeling space in a way to have
an orthogonal system {Pc, Pv
1
,Pv
2
} such that ||Pv
1
|| =
||Pv
2
|| and then ||Pλ
1
v
1
|| and ||Pλ
2
v
2
|| reflect the value
of the eigenvalues (as shown in the figures below). The
different cases are defined from the eigenvalues:
• Case 1: if λ
1
> λ
2
> 0, the contraction in the direc-
tion of v
2
is greater than that in the direction of v
1
,
the sequence converges to the point Pc tangentially
to the eigenvector v
1
. Figure 3 left illustrates the dif-
ferent configurations according to the location of the
starting point in the four quadrants defined from the
eigenvectors.
• Case 2: if |λ
1
| > |λ
2
|, λ
1
< 0 and λ
2
< 0, the com-
ponents x
1
(λ
1
)
n
and x
2
(λ
2
)
n
of q
n
alternates between
positive and negative values as a function of n, and
therefore the sequence of points passes alternately
from the starting quadrant to the opposite one (Fig-
ure 3 right).
Figure 3: Left: Applying T (with eigenvalues λ
1
> λ
2
) on
four different starting points (Pq
0
,Pq
′
0
,Pq
′′
0
,Pq
′′′
0
). Each se-
quence converges to Pc tangentially to Pv
1
. Right: λ
1
< 0
and λ
2
< 0: the sequence of points {PT
n
q
0
}
n∈N
alternates
between the starting quadrant to the opposite one until con-
verging towards the point Pc.
• Case 3: if |λ
1
| > λ
2
> 0 and λ
1
< 0, the component
x
1
(λ
1
)
n
of q
n
alternates between positive and nega-
tive values as a function of n, and therefore the se-
quence of points passes alternately from one of the
half-planes delimited by the line c +tv
2
to the other
half-plane (Figure 4 left).
• Case 4: if λ
1
> |λ
2
| and λ
2
< 0, the component
x
2
(λ
2
)
n
of q
n
alternates between positive and neg-
ative values as a function of n, and therefore the se-
quence of points passes alternately from one of the
half-planes delimited by the line c +tv
1
to the other
half-plane. But the sequence already converges to c
tangentially to v
1
(Figure 4 right).
• Case 5: λ
1
= λ
2
> 0, the contractions in the direc-
tions of v
1
and v
2
are equal, and the sequence of
points converges on a straight line to the point Pc.
• Case 6: if λ
1
=
λ
2
are complex eigenvalues, the oper-
ator is characterized by a rotation, and the sequence
of points converges on a spiral to the point Pc.
Figure 4: In both figures, the sequences of points
{PT
n
q
0
}
n∈N
converge to the point Pc. They alternate be-
tween the positive and negative half-planes delimited by the
second eigenvector Pλ
2
v
2
(for the left figure, where λ
1
< 0)
or by the first one Pλ
1
v
1
(for the right figure, where λ
2
< 0).
4.2 The Differential Characteristic
Function
In order to analyze the differential properties at the fixed
point c of a contractive operator T , we aim to find an
analytical function that interpolates the points of the se-
quence obtained by applying T on a starting point q
0
.
This expression will allow a formal characterization of
the differential behavior at the limit point of the se-
quence.
We first focus on the simplest case with T acting on
BI
3
and where both λ
1
and λ
2
are positive (i.e. 1 > λ
1
>
λ
2
> 0). We will present the other configurations later.
Definition. Consider an operator T acting on BI
3
with
eigenvalues (λ
0
= 1 > λ
1
> λ
2
> 0) and associated
eigenvectors (v
0
= c, v
1
,v
2
). We suppose v
1
and v
2
in-
dependent. Let q be a point of BI
3
\{c + tv
2
}
t∈R
(i.e. q
does not belong to the line passing through c in the direc-
tion of v
2
), and consider its expression in the coordinates
system (c, v
1
,v
2
): q = c + x
1
v
1
+ x
2
v
2
. We suppose that
v
1
and v
2
are chosen such that x
1
> 0 and x
2
> 0. The
differential characteristic function (DCF) is defined by:
D
T,q
(t) = c + tv
1
+ βt
α
v
2
, t ∈ R
+
(5)
where β =
x
2
(x
1
)
α
and α =
log(λ
2
)
log(λ
1
)
.
Property. D
T,q
0
interpolates the points of the sequence
{
q
n
}
n∈N
=
{
T
n
q
0
}
n∈N
(see Figure 5 left).
Proof. q
0
= c + x
1
v
1
+ x
2
v
2
, where x
1
,x
2
∈ R
+∗
q
n
= T
n
q
0
= c + x
1
(λ
1
)
n
v
1
+ x
2
(λ
2
)
n
v
2
= c + X
1
v
1
+ X
2
v
2
We have to prove that q
n
have their coordinates
(X
1
,X
2
) in the form (t,βt
α
). Set t = X
1
= x
1
(λ
1
)
n
then:
βt
α
= β(x
1
(λ
1
)
n
)
α
=
x
2
(x
1
)
α
(x
1
)
α
((λ
1
)
n
)
α
. Because α =
log(λ
2
)
log(λ
1
)
, λ
2
= (λ
1
)
α
, x
2
(λ
2
)
n
= βt
α
and X
2
= βt
α
.
Property. The graph of D
T,q
(t), denoted by
Graph(D
T,q
), is invariant under T .
Proof. Consider a DCF D
T,q
(t) = c+tv
1
+βt
α
v
2
. Let m
be a point of Graph(D
T,q
), m = c + t
m
v
1
+ βt
α
m
v
2
. Then
T m = c + λ
1
t
m
v
1
+ λ
2
βt
α
m
v
2
and as λ
2
= (λ
1
)
α
, T m =
c + λ
1
t
m
v
1
+ β(λ
1
t
m
)
α
v
2
∈ Graph(D
T,q
)
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
180
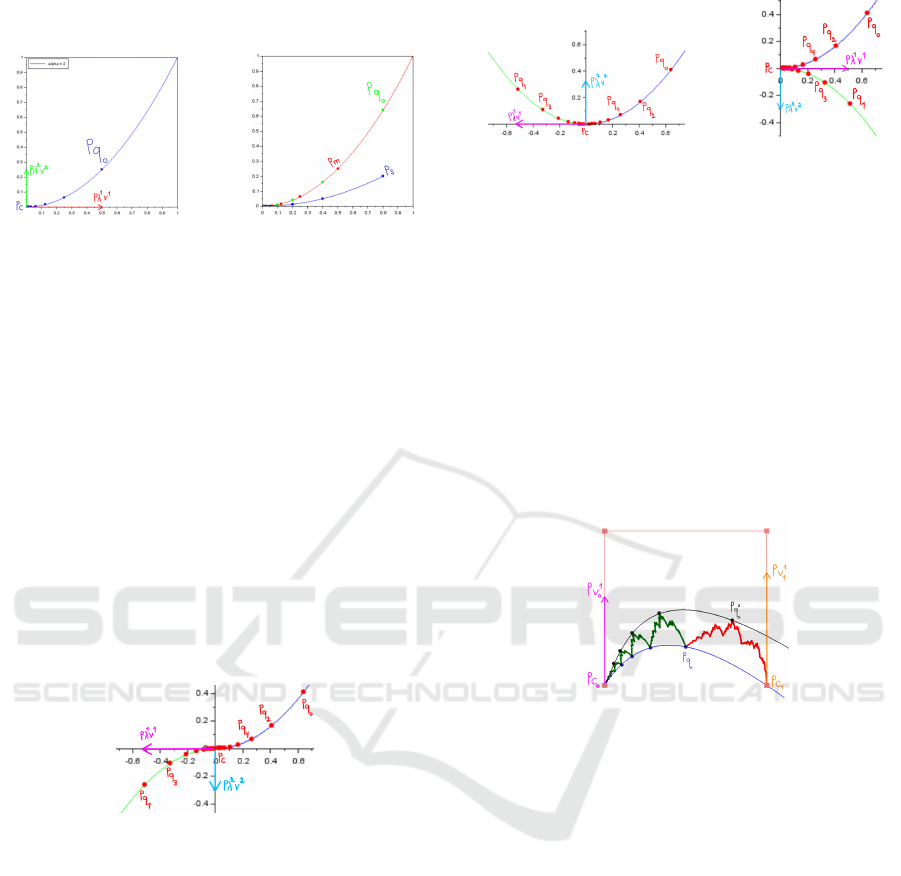
Remark. If s ̸∈ Graph(D
T,q
), then β
s
̸= β, and D
T,s
is
different from D
T,q
(see Figure 5 right).
Figure 5: Various DCFs D
T,q
(t) = c +tv
1
+βt
α
v
2
with dif-
ferent starting points (q
0
, m or s). In the right figure, D
T,q
0
(in red) interpolates both green and red sequences of points
{PT
n
q
0
}
n∈N
and {PT
n
m}
n∈N
(with m ∈ Graph(D
T,q
0
)).
In blue, D
T,s
(s ̸∈ Graph(D
T,q
0
)) interpolates the blue se-
quence of points.
In the definition of the DCF, we previously imposed
conditions on λ
1
and λ
2
. We discuss here the gen-
eral configuration. For the specific cases where x
1
or
x
2
are null, D
T,q
0
is defined as follows: if x
1
= 0 then
D
T,q
0
(t) = c + tv
2
and if x
2
= 0 then D
T,q
0
(t) = c + tv
1
.
If both x
1
and x
2
are null D
T,q
0
is not defined (q
0
= c the
fixed point of T ). If λ
1
and/or λ
2
are strictly negative,
we define a double DCF, one interpolating the sequence
of points {PT
n
q
0
}
n∈N
with even values of n, and one for
odd values:
• Case 1: λ
1
and λ
2
are strictly negative (see Fig 6):
– D
1
T,q
0
(t) = c + tv
1
+ βt
α
v
2
for even values of n.
– D
2
T,q
0
(t) = c − tv
1
− βt
α
v
2
for odd values of n.
Figure 6: λ
1
< 0 and λ
2
< 0 ⇒ double DCF, the first one in
blue interpolating the points of the sequence {PT
n
q
0
}
n∈N
for even indices, and the second one in green for odd in-
dices.
• Case 2: λ
1
strictly negative (see Fig 7 left):
– D
1
T,q
0
(t) = c + tv
1
+ βt
α
v
2
for even values of n.
– D
2
T,q
0
(t) = c − tv
1
+ βt
α
v
2
for odd values of n.
• Case 3: λ
2
strictly negative (see Fig 7 right):
– D
1
T,q
0
(t) = c + tv
1
+ βt
α
v
2
for even values of n.
– D
2
T,q
0
(t) = c + tv
1
− βt
α
v
2
for odd values of n.
• Case 4: λ
1
strictly negative and |λ
1
| = λ
2
> 0:
– D
1
T,q
0
(t) = c + tv
1
+ βtv
2
for even values of n.
– D
2
T,q
0
(t) = c − tv
1
+ βtv
2
for odd values of n.
Now, consider a fractal curve defined in a barycentric
space BI
N
, from a set of I operators {T
i
}
I−1
i=0
. For a given
Figure 7: For both figures, two DCFs are shown with dif-
ferent colours. The blue one interpolates the points of the
sequence {PT
n
q
0
}
n∈N
with even indices, the green one for
odd indices. λ
1
< 0 for the left figure and λ
2
< 0 for the
right one.
operator T
i
and from each point q
0
of the curve, we can
define a sequence of points {q
n
}
n∈N
belonging to the
curve and consequently a simple or double DCF. Fig-
ure 8 shows a fractal curve in BI
4
defined from an IFS
composed of two operators T
0
and T
1
, and projected into
the modeling space using four control points. This curve
has many points having different values of β. Applying
T
0
iteratively to these points results in many sequences
of points converging to the left endpoint c
0
, such as the
two sequences displayed in blue and black in the figure
with their corresponding DCFs. Let us denote the set of
Figure 8: In blue and black, the two different sequences
obtained by applying T
0
iteratively to Pq
0
and Pq
′
0
are con-
verging to the limit point Pc
0
.
all DCFs representing all sequences converging to c
i
by:
FDCF(i) = {D
T
i
,q
0
,q
0
∈ A} (6)
In the following section, we will analyze FDCF(i) to
characterize the differential behavior in the neighbor-
hood of c
i
. Then, we will propagate these results to
dyadic points thanks to the self-similarity property.
5 PSEUDO-TANGENT
PROPERTIES OF FRACTAL
CURVES USING DCF
In this section, we show how we obtain known results
given by Bensoudane et al. (Bensoudane, 2009).
Let us consider a fractal curve defined in the barycen-
tric space BI
N
, from a set of I operators {T
i
}
I−1
i=0
. The dif-
ferential behavior of a sequence of points can be directly
determined from the derivative of D
T
i
,q
0
. According to
the different configurations:
Pseudo-Curvature of Fractal Curves for Geometric Control of Roughness
181
• D
′
T
i
,q
0
(t) = ±v
1
i
±βαt
α−1
v
2
i
, when x
1
̸= 0 and x
2
̸= 0,
• D
′
T
i
,q
0
(t) = ±v
1
i
, when x
2
= 0,
• or D
′
T
i
,q
0
(t) = ±v
2
i
, when x
1
= 0.
The tangent at t = 0 is:
• If α > 1, D
′
T
i
,q
0
(0) = ±v
1
i
(if x
1
̸= 0) or D
′
T
i
,q
0
(0) =
±v
2
i
(if x
1
= 0).
The derivative depends only on which quadrant q
0
belongs.
• If α = 1, D
′
T
i
,q
0
(0) = ±v
1
i
± βv
2
i
.
The derivative depends on the position of q
0
.
This means that if all curve points satisfy the same con-
ditions in terms of x
1
and x
2
, all iterative sequences will
converge to the fixed point with the same tangent.
Note that the tangent lies in the barycentric space.
The tangent of the projected curve according to the set
of control points is PD
′
T
i
,q
0
(0) (the projection conserves
the collinearity). To have a unique behavior for all DCF
of a FDCF(i), we need to impose common constraints
on all the points of the curve. These constraints are ex-
pressed in terms of sign(x
1
) and/or sign(x
2
). To present
this analysis without ambiguity, we consider the tan-
gent itself and the direction of the finite difference at
t: ∆
h
[C](t) = C(t + h) −C(t), where C([0,1]) = A de-
notes the parameterised fractal curve (with C(0) = c
0
and C(1) = c
1
). In the following cases, we show differ-
ent configurations with associated example curves. Each
curve is generated by an IFS composed of two opera-
tors in BI
3
and then is projected into R
2
by a set of three
control points (black squares). We focus on T
0
and we
only display D
T
0
,c
1
(in green). For each figure, x
1
and x
2
represents the coordinates of c
1
in (c
0
,v
1
0
,v
2
0
). The con-
straints on x
1
and x
2
must be satisfied for all q belonging
to the curve:
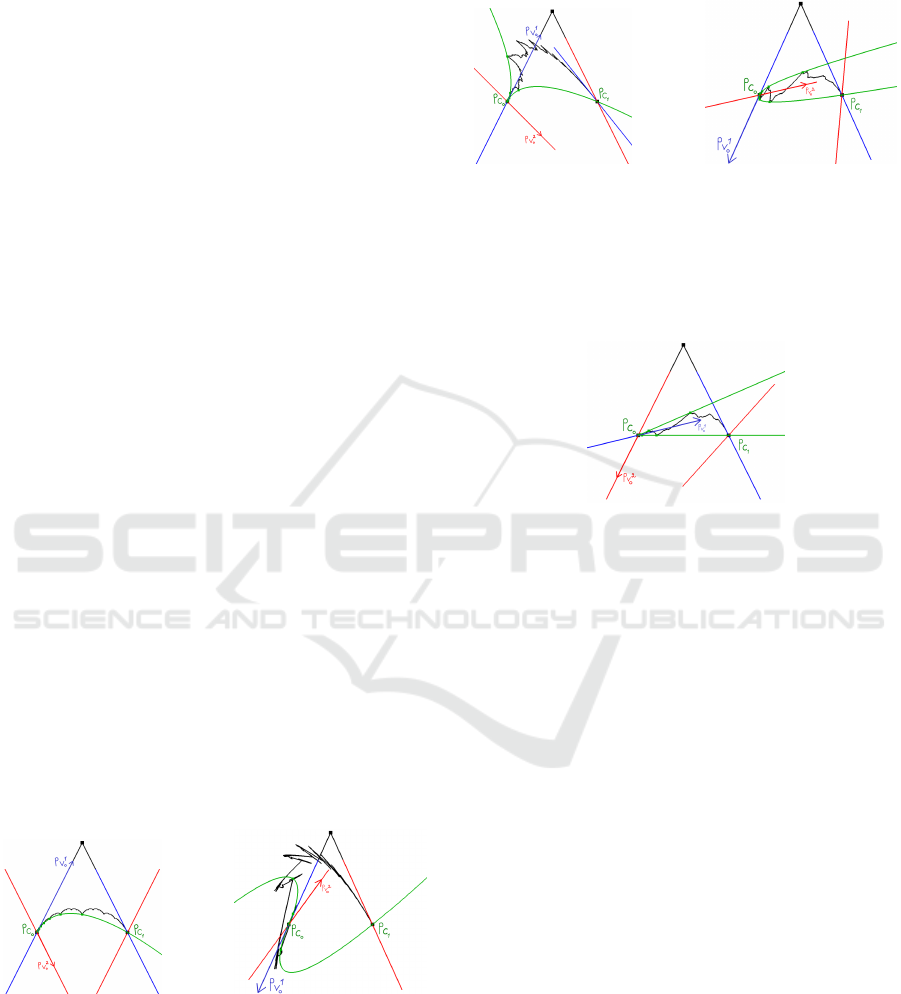
• Case 1: λ
1
0
> 0 and λ
2
0
> 0, x
1
> 0 and x
2
> 0 ⇒ the
tangent at Pc
0
is Pv
1
0
(Figure 9 left).
• Case 2: λ
1
0
< 0 and λ
2
0
< 0 ⇒ the tangent at Pc
0
oscillates indefinitely between Pv
1
0
and −Pv
1
0
(Figure
9 right).
Figure 9: Left: the tangent at Pc
0
is Pv
1
0
. Right: at
Pc
0
, ∆
h
[C](0) oscillates indefinitely between Pv
1
0
and −Pv
1
0
,
while h tends to zero.
• Case 3: λ
1
0
> 0 and λ
2
0
< 0, x
1
> 0 ⇒ the tangent at
Pc
0
is Pv
1
0
(Figure 10 left).
• Case 4: λ
1
0
< 0 and λ
2
0
> 0, x
2
> 0 ⇒ the tangent
at Pc
0
oscillates indefinitely between Pv
1
0
and −Pv
1
0
(Figure 10 right).
Figure 10: Left: the tangent at Pc
0
is Pv
1
0
. Right: at
Pc
0
, ∆
h
[ f ](0) oscillates indefinitely between Pv
1
0
and −Pv
1
0
,
while h tends to zero.
• Case 5: |λ
1
0
| = λ
2
0
> 0, x
1
> 0 ⇒ the tangent is not
defined at Pc
0
, it oscillates indefinitely between two
extrema (Figure 11).
Figure 11: In c
0
, ∆
h
[ f ](0) oscillates indefinitely between
two extrema depending on the geometry of the curve, while
h tends to zero.
This analysis can be carried out on both ending
points of the curve. Then, by the self-similarity property,
each behavior is transported to the right and left sides
of each dyadic point. All possible combinations can be
obtained. In case where an eigenvalue is complex, it re-
flects a rotation component in the operator, introduces a
spiral around the fixed points.
6 PSEUDO-CURVATURE OF
FRACTAL CURVES
In the previous section, we showed that even if fractal
curves are generally nowhere differentiable, it is possi-
ble, with some conditions, to define right and left tan-
gents. In this section, we focus on the curvature to as-
sess the impact of the second derivative on the curve.
The curvature presents the first advantage of being inde-
pendent of the parametrization, which is not apparent to
manage for fractal curves. Our idea is to study the cur-
vature of a fractal through the second derivative of the
FDCF.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
182
6.1 Curvature Analysis of a DCF
First, we focus on the curvature at the left and right end-
points of the curve. For a given parametric curve f (t),
the curvature κ(t) is:
κ(t) =
∥ f
′
(t) × f
′′
(t)∥
∥ f
′
(t)∥
3
(7)
Consider an operator T (of an IFS defining a curve) act-
ing on BI
3
, (v
0
= c, v
1
,v
2
) its eigenvectors and q
0
a point
of BI
3
. For the simplicity of calculations, we project the
sequence of points {T
n
q
0
}
n∈N
onto the modeling space
in a way to have an orthogonal system {Pc,Pv
1
,Pv
2
}
such that ||Pv
1
|| = ||Pv
2
|| (the general case will be given
later). From a given point q
0
belonging to the curve, we
can determine the curvature of PD
T,q
0
:
κ(t) =
PD
′
T,q
0
(t) × PD
′′
T,q
0
(t)
PD
′
T,q
0
(t)
3
(8)
Note that we compute the curvature directly in the mod-
eling space (i.e. from the projected curves) because the
cross-product has no meaning in the barycentric space.
We have:
PD
′
T,q
0
(t) = Pv
1
+ βαt
α−1
Pv
2
(9)
PD
′′
T,q
0
(t) = βα(α − 1)t
α−2
Pv
2
(10)
Pv
1
and Pv
2
are chosen orthonormal, then:
κ(t) =
βα(α − 1)t
α−2
(1 + (βαt
α−1
)
2
)
3/2
(11)
Using the tangent existence constraint: 0 < |λ
2
| < λ
1
< 1
we can deduce the domain of α:
1 <
log(|λ
2
|)
log(λ
1
)
= α < +∞ (12)
We can distinguish three different cases for the value
κ(t) at t = 0, depending on the value of α:
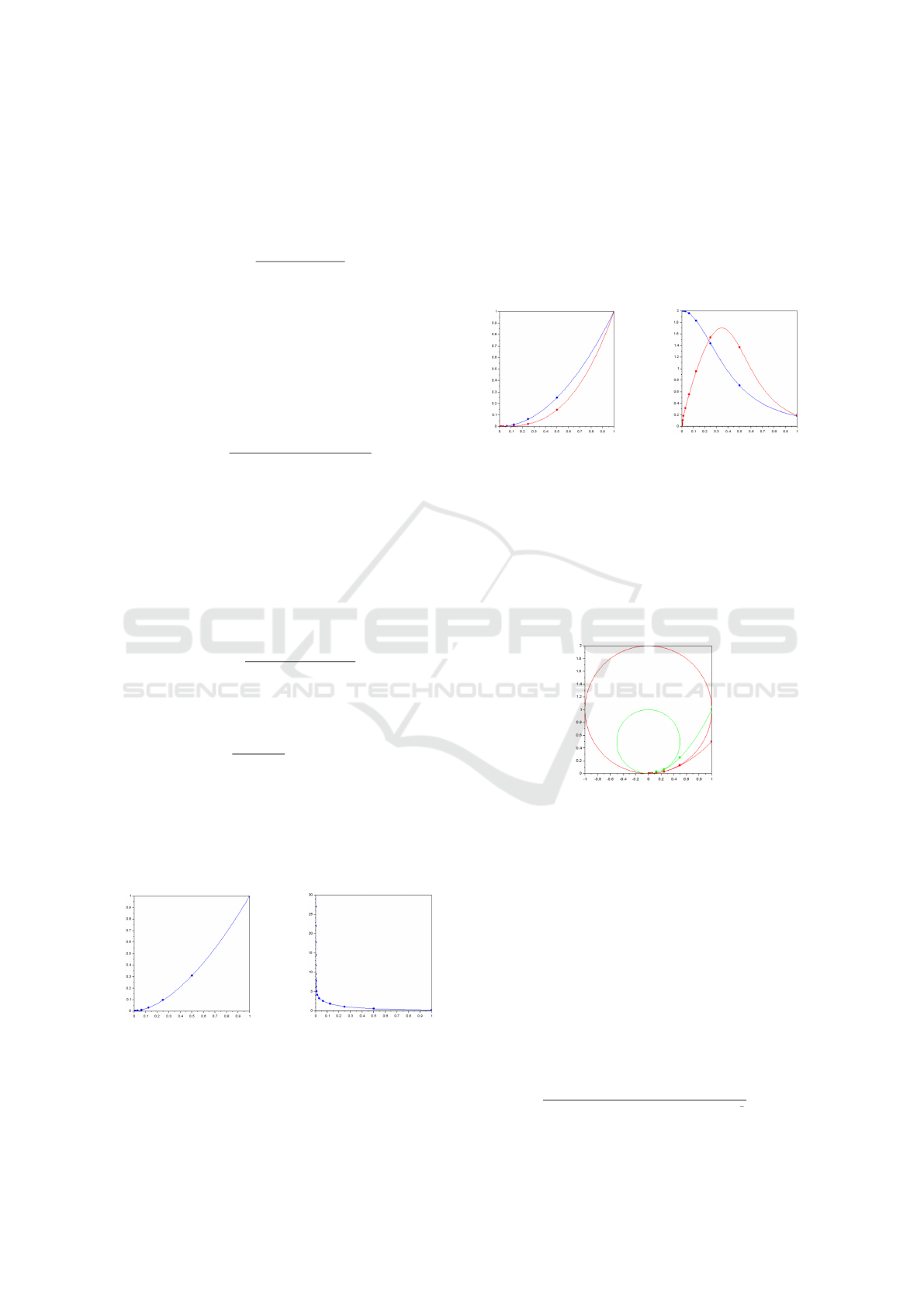
• Case 1: if 1 < α < 2 ⇒ lim
t→0
κ(t) = +∞, Figure
12 left shows in blue the curve PD
T,q
0
and Figure 12
right the corresponding curvature. When t tends to
zero, the curvature tends to +∞.
Figure 12: Left: the curve PD
T,q
0
having 1 < α < 2. Right:
the curvature values of the curve displayed on the left figure.
• Case 2: if α = 2 (λ
2
= λ
2
1
) ⇒ κ(0) =
|
2β
|
̸= 0. Figure
13 left shows in blue the curve PD
T,q
0
and Figure 13
right the corresponding curvature. When t tends to
zero, the curvature tends to a finite non-zero value
depending on β. This case induces a correspondence
between the second derivative PD
′′
T,q
0
and the second
eigenvector Pv
2
at the fixed point Pc of T (PD
′′
T,q
0
(0)
collinear to Pv
2
).
• Case 3: if α > 2, as the curve in red (Figure 13 left)
approaches the fixed point Pc, lim
t→0
κ(t) = 0 (Fig-
ure 13 right).
Figure 13: Left: in red, the curve PD
T,q
0
where α > 2. In
blue, the curve PD
T,q
0
where α = 2. Right: the correspond-
ing curvature values for the red and blue curves displayed
on the left figure.
Thanks to D
T,q
0
, we can characterize the differential
behavior of the sequence {q
n
}
n∈N
at the fixed point of
an operator. In the first and third cases, the curvature is
either zero or infinite and does not depend on the value
of β. While in the case where α = 2, the curvature is
finite, non-zero and depends on the initial point q
0
(see
Figure 14).
Figure 14: Two starting points (on the right) having distinct
β ⇒ two distinct DCFs (curves in red and green) having
two different curvatures represented by their red and green
osculating circles at the limit point.
6.2 Curvature of a DCF in BI
3
and BI
N
In the previous section, when we have considered an op-
erator T acting on BI
3
, we have made the assumption
that {Pc,Pv
1
,Pv
2
} is an orthogonal system. Later, we
adapt the previous results to the general case in BI
3
and
after in BI
n
, for an IFS
{
T
0
,T
1
}
.
Let us consider {i,j} the canonical orthonormal basis
of R
2
. We denote the decomposition of each projected
eigenvector of an operator T
i
by: Pv
k
i
= a
k
i + b
k
j for k ∈
{1,2}.
Then for each PD
T
i
,q
(t):
κ(t)=
|
(a
1
b
2
−b
1
a
2
)β
i
α
i
(α
i
−1)
|
t
α
i
−2
|
a
2
1
+b
2
1
+2(a
1
a
2
+b
1
b
2
)β
i
α
i
t
α
i
−1
+(a
2
2
+b
2
2
)(β
i
α
i
t
α
i
−1
)
2
|
3
2
(13)
Pseudo-Curvature of Fractal Curves for Geometric Control of Roughness
183
From this formula and because 1 < α
i
=
log(|λ
2
i
|)
log(λ
1
i
)
< +∞,
we have the same cases as the previous simple section:
• Case 1: 1 < α
i
< 2: α
i
− 2 < 0 then lim
t→0
κ(t) =
+∞.
• Case 2: α
i
= 2 then κ(0) is finite and non-zero.
The curvature at c
i
: κ(0) =
|
2β
i
(a
1
b
2
− b
1
a
2
)
|
(a
2
1
+ b
2
1
)
3
2
depends on β
i
. This case induces a correspondence
between the second derivative D
′′
T
i
,q
0
and the second
eigenvector v
2
i
at c
i
(D
′′
T
i
,q
0
(0) collinear to v
2
i
).
• Case 3: α
i
> 2: lim
t→0
κ(t) = 0.
In general, a DCF lies in an N-dimensional barycen-
tric space BI
N
. Operators T
i
are represented by N × N
matrices, with at most N eigenvalues and N eigenvectors.
The eigenvalues have the following condition: λ
0
i
= 1 >
λ
1
i
> |λ
2
i
| > ·· · > |λ
N−1
i
| > 0. Consider a starting point
q
0
= c
i
+x
1
v
1
i
+· ··+x
N−1
v
N−1
i
∈ A where x
1
,...,x
N−1
∈
R, the DCF which interpolates the obtained sequence of
points {q
n
}
n∈N
(in BI
N
) becomes:
D
T
i
,q
0
=c
i
+tv
1
i
+β
i,2
t
α
i,2
v
2
i
+···+β
i,N−1
t
α
i,N−1
v
N−1
i
(14)
where α
i,z
=
log(|λ
z
i
|)
log(λ
1
i
)
, and β
i,z
=
x
z
x
α
i,z
z−1
for 2 ≤ z ≤ N − 1,
and its curvature is more complex, but when t tends to
zero, most of the terms vanish, and we obtain the same
cases as for BI
3
.
6.3 Pseudo-Curvature and FDCF
As defined in section 5, we associate to each fixed point
c
i
a FDCF(i). This family is defined from all the points
belonging to the curve and having different values of β.
As we show in sections 6.1 and 6.2, we identify three
identical cases, depending only on α
i,2
. For cases where
1 < α
i,2
< 2 and α
i,2
> 2, the curvature doesn’t depend
on β
i,2
, meaning all DCF of FDCF(i) have the same
curvature which is infinite and 0 respectively. Then we
state that the pseudo curvature of the fractal curve at c
i
is the common curvature of FDCF(i).
For the remaining case, where α
i,2
= 2, the curvature
is in the form:
κ
i
(0) =
|
2β
i,2
× cst
1
|
cst
2
, (15)
where cst
1
and cst
2
denote two real constants. If all
points q
0
belonging to the fractal curve except the point
c
i
(A \ {c
i
}) satisfy x
1
> 0 and x
2
> 0 (implying λ
1
i
> 0
and λ
2
i
> 0), the set {β
i,2
, s.t. q
0
∈ A} have a lower and
an upper bound, β
i,in f
and β
i,sup
respectively. The curve
is embedded in the area defined by all the graphs of
FDCF(i) as the Figure 15 shows. FDCF(i) induces a
range of curvatures bounded by κ
i,in f
=
|
2β
i,in f
×cst
1
|
cst
2
and
κ
i,sup
=
|
2β
i,sup
×cst
1
|
cst
2
. In this case, the behavior of the curve
is too complex to be approximated by a unique circle.
We define the pseudo curvature of the fractal curve at c
i
by the interval [κ
i,in f
,κ
i,sup
], implying a continuous set of
osculating circles (see Figure 17).
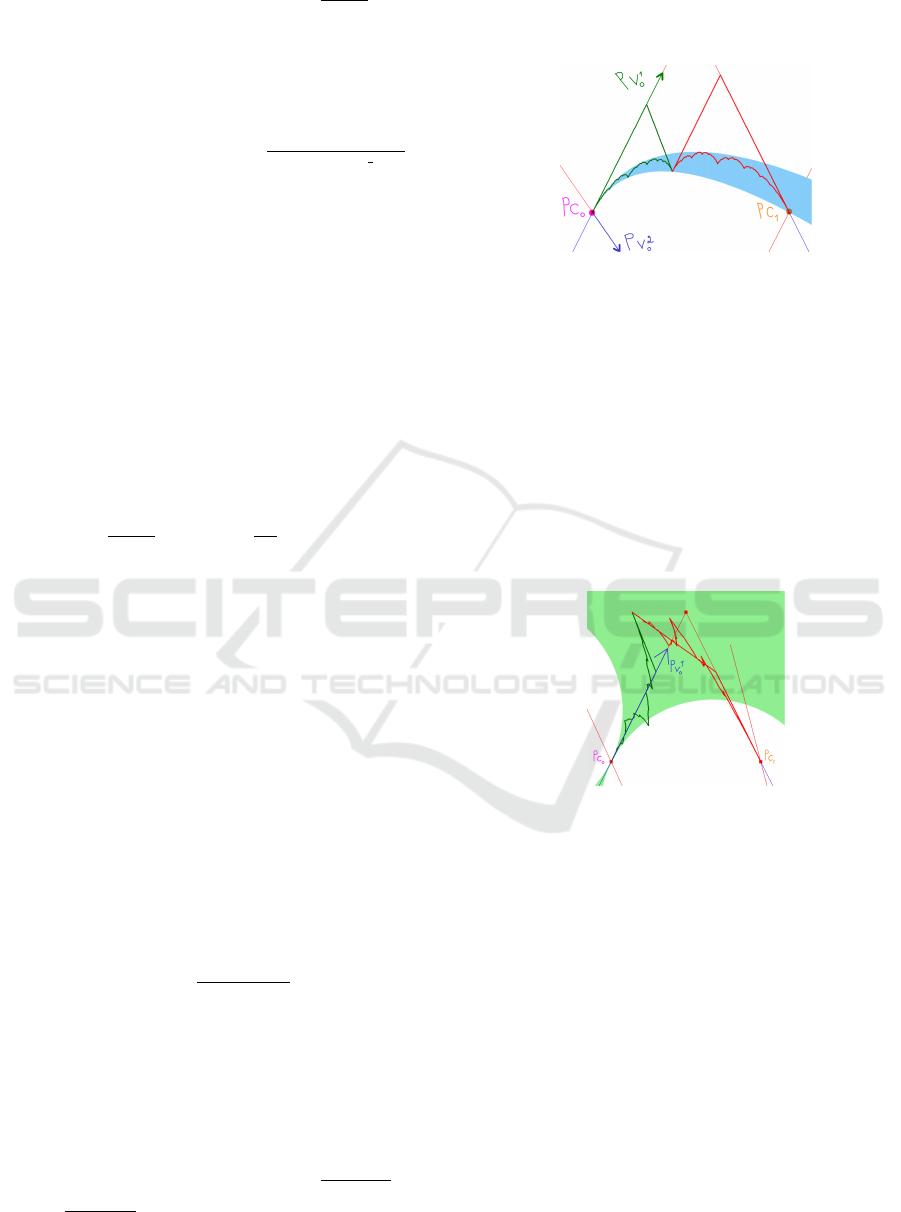
Figure 15: In blue, the projected DCFs of FDCF(0) cover
the fractal curve.
We can observe different situations according to the
signs of λ
1
i
and λ
2
i
. For example, in Figure 16, 1 > λ
1
0
>
|λ
2
0
| > 0 and λ
2
0
< 0. As explained in section 3.2, con-
sidering the computation of the curvature at c
i
, we have
a double DCF for each sequence of points converging to
c
i
. This involves a range of curvature for both sides of
c
i
w.r.t. v
1
i
, with the same value of κ
sup
. As the curve
passes through the line c
i
+ tv
1
i
, there exist points s.t.
x
2
= 0 and defining a DCF with a null curvature. The
pseudo-curvature is the range of curvature defined from
FDCF(i) as a set of curvatures ranging in [0,κ
i,sup
] for
both sides of the line c
i
+tv
1
i
.
Figure 16: In green, we show the range of the right pseudo-
curvature at the left endpoint c
0
, where 0 ≤ κ ≤ 0.659 and
λ
2
0
= −(λ
1
0
)
2
= −0.36.
When λ
1
i
< 0 and λ
2
i
> 0, we can do the analysis
symmetrically to the previous one. As the curve passes
through the line c
i
+ tv
2
i
, there exist points s.t. x
1
= 0
and defining a DCF with the value of curvature equals
0. For both sides of the line c
i
+ tv
2
i
, as the point of
the curve approaches the line, the curvature of the cor-
responding DCF tends to infinity. But it although exists
κ
i,in f
as the curve is compact. The pseudo-curvature is
the range of curvature defined from FDCF(i) as a set
of curvatures ranging in [κ
i,in f
,+∞[ for both sides of the
line c
i
+tv
1
i
and 0 on c
i
+tv
1
i
(see Figure 19). For dyadic
points, the pseudo-curvature can be obtained straight-
forwardly from the self-similarity property and previous
results from the endpoints of the curve. For example,
to determine the pseudo-curvature at the joining point
(T
0
c
1
= T
1
c
0
), we just have to apply the operator T
0
on FDCF(1) and T
1
on FDCF(0) to obtain the left and
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
184

the right pseudo-curvature, which is for the left pseudo-
curvature:
κ
L
(t) =
PT
0
D
′
T
1
,q
0
(t) × PT
0
D
′′
T
1
,q
0
(t)
PT
0
D
′
T
1
,q
0
(t)
3
. (16)
For the right side of the joining point, κ
R
(t) is deduced
from equation 16 by interchanging T
0
and T
1
. It is equiv-
alent to computing the pseudo-curvature of a new pro-
jection according to the control point P
′
= PT
1
. For any
dyadic point p = T
σ
0
T
σ
1
...T
σ
l−1
c
σ
l
we have:
κ
L
(t) =
PT T
0
D
′
T
1
,q
0
(t) × PT T
0
D
′′
T
1
,q
0
(t)
PT T
0
D
′
T
1
,q
0
(t)
3
, (17)
where T = T
σ
0
T
σ
1
...T
σ
l−2
. For the right side of
the dyadic point p, κ
R
(t) is deduced from equation
17 by interchanging T
0
and T
1
. Note that if σ
l
=
0, we have σ
l−1
= 1 because of the definition of
a dyadic point. Consequently T
σ
0
T
σ
1
...T
σ
l−2
T
1
c
0
=
T
σ
0
T
σ
1
...T
σ
l−2
T
0
c
1
= p. We have the symmetric prop-
erty if σ
l
= 1.
Figure 17 shows in orange the resulting range of os-
culating circles representing the right pseudo-curvature
at the joining point (see Figure 18 for its left pseudo-
curvature). Also, Figure 19 shows the range of osculat-
ing circles at the joining point for the case where λ
1
i
< 0
and λ
2
i
> 0 (Figure 19).
Figure 17: First, FDCF(0) of the curve in Figure 15 induces
a range of osculating circles (illustrated in green) at the left
endpoint c
0
, where κ
0,in f
= 1.492, κ
0,sup
= 0.982. Second,
the range of osculating circles for the right pseudo-curvature
at the joining point is illustrated in orange, where 2.008 ≤
κ ≤ 2.932. For this curve: λ
2
0
= (λ
1
0
)
2
= 0.3025 (1 > λ
1
0
>
λ
2
0
> 0).
Figure 18: In pink, we show the range of the left pseudo-
curvature (of the curve displayed in Figure 15) at c
1
:
0.589 ≤ κ ≤ 0.733 and at the joining point = T
0
c
1
: 2.785 ≤
κ ≤ 3.460. For this curve:λ
2
1
= (λ
1
1
)
2
= 0.49 (1 > λ
1
1
> λ
2
1
>
0).
Figures 20 to 22 show some examples of fractal
curves defined from the same set of control points. For
Figure 19: In green, osculating circles representing the
range of the right curvatures at the left endpoint c
0
: 5.555 <
κ < +∞, for both sides of Pc
0
+ tPv
2
0
, and κ = 0 on
Pc
0
+ tPv
2
0
. In pink, the left range of osculating circles at
the right endpoint c
1
( 0.478 ≤ κ ≤ 0.525). In orange and
blue, the right and left ranges of osculating circles at the
joining point (9.492 < κ < +∞ and 0.115 ≤ κ ≤ 0.126 re-
spectively). For this curve: λ
1
0
= −0.35 and λ
2
0
= (λ
1
0
)
2
.
information, we display their associated osculating cir-
cles, distribution of normals (on the top right corner in
black), and we mention their fractal dimension.
First, we consider the case where α = 2. Figures 20
and 21 show two symmetric curves having different right
and left tangents at the joining point (red and green lines
in the figures), but since each curve is symmetric, i.e. the
operators have the same eigenvalues and eigenvectors,
then we have equal ranges of the left and right curvatures
(κ
L
and κ
R
).
In the specific case where T
0
and T
1
represent the
de Casteljau matrices, we obtain a B
´
ezier curve, with
a unique DCF which is the Bernstein polynomial basis
functions.
Secondly, when 1 < α < 2, κ
L
= κ
R
= 0, meaning the
osculating circle is a straight line. Figure 22 left shows a
fractal curve for which at, any point, the curve seems to
jump suddenly in the direction of the tangent, which cor-
responds to the osculating “circle” (see the endpoints and
the joining point). Finally, when α > 2, κ
L
= κ
R
= +∞,
meaning the osculating circle is reduced to a point. Fig-
ure 22 right shows a fractal curve for which, at any point,
the curve seems to turn sharply in a different direction
from the tangent.
Figure 20: At the joining point, we display the right and left
sets of osculating circles with: 2.375 ≤ κ
R
= κ
L
≤ 2.958.
For this curve: the fractal dimension is 1.021. α
i,2
= 2 and
λ
2
i
= (λ
1
i
)
2
= 0.36.
From the previous Figures (17 to 22), we can observe
a dependency between the amplitude of the pseudo-
curvature range and the curve’s apparent roughness, as
the values of the fractal dimension show.
Pseudo-Curvature of Fractal Curves for Geometric Control of Roughness
185
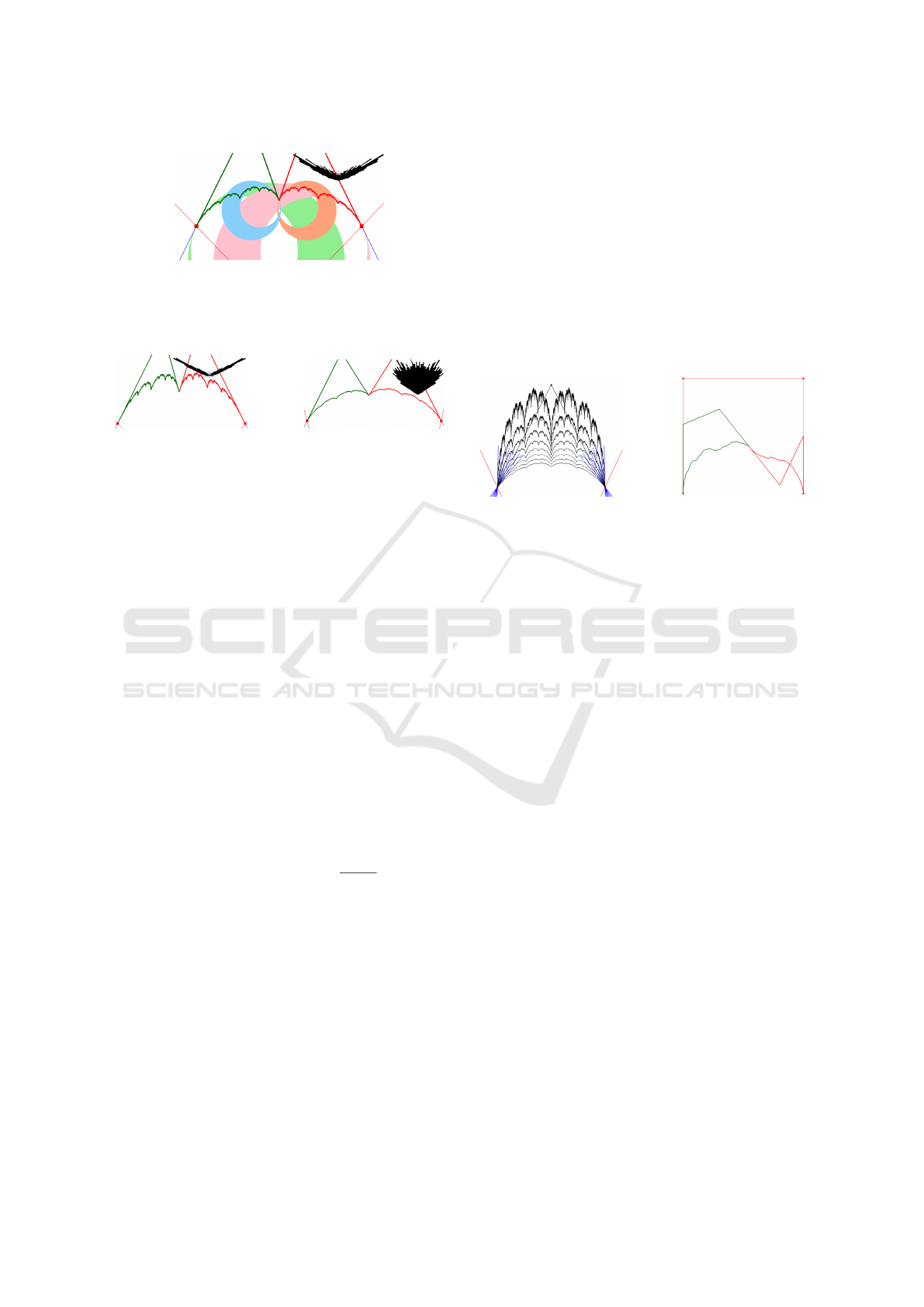
Figure 21: At the joining point, we display the right and left
sets of osculating circles with: 2.808 ≤ κ
R
= κ
L
≤ 4.098.
For this curve: the fractal dimension is 1.095, α
i,2
= 2 and
λ
2
i
= (λ
1
i
)
2
= 0.4225.
Figure 22: For these two figures, we focus on the joining
point. Left: α
i,2
= 3 ⇒ κ
L
= κ
R
= 0, the fractal dimension
is 1.052, λ
2
i
= 0.343 and λ
1
i
= 0.7. Right: 1 < α = 1.5 <
2 ⇒ κ
L
= κ
R
= +∞, the fractal dimension is 1.007, λ
2
0
=
0.3536, λ
1
0
= 0.5, λ
2
1
= 0.4079 and λ
1
1
= 0.55.
7 DISCUSSION
The DCF has two main interests. First, it highlights the
dynamical behavior of the IFS; we mean how an opera-
tor matches a point of the curve onto another one along
the iteration process, up to the limit fixed point. The
DCF helps to understand and characterize the differen-
tial properties of the curve, as we have shown for the
pseudo-tangent and curvature, which significantly im-
pacts the roughness. Second, the DCF is defined from
the IFS operators’ eigensystems. Consequently, we can
fix the eigenvalues and eigenvectors to obtain desired
differential properties. Denoting D the diagonal matrices
of expected eigenvalues and V , the column matrix of the
chosen independent eigenvectors, we can compute the
matrix M of the corresponding operator by M = V DV
−1
.
The eigenvalue λ
1
and its associated eigenvector define
the tangent at the fixed point. Then, we can choose the
value of α by setting λ
2
= ±λ
1
α
(α =
log(|λ
2
|)
log(λ
1
)
) to specify
the type of curvature (α < 2 ⇒ κ = ∞, α > 2 ⇒ κ = 0,
α = 2 ⇒ range of curvatures).
Specifying tangents and curvatures at endpoints
(fixed points) is insufficient to control the roughness ac-
curately. The joining point of the two self-similar curve
parts plays a crucial role. Its right and left pseudo-
tangents depend continuously on the endpoints pseudo-
tangents. By adjusting their relative orientations, we can
define a more or less sharp peak (or valley), which will
be copied along the curve by self-similarity (see Figure
23 left). In (Podkorytov, 2013), Podkorytov shows how
to impose G
(1)
continuity on curves defined by C-IFS.
Using this approach and choosing appropriate eigenval-
ues and eigenvectors, we can define different left and
right curvatures at the joining point. The resulting curve
is G
(1)
with a specific ”second-order” roughness (see
Figure 23 right).
In this paper, we give priority to didactic simple ex-
amples. However, complex curves and surfaces can be
produced by increasing the degrees of freedom (d.o.f)
using more than two operators and more control points.
The deterministic self-similarity aspect is not visible
with just a few more d.o.f, producing random-like curves
and surfaces (see Figures 24 and 25 right). Our results
remain for any configurations, and we have to proceed to
a deep study to understand the relation between pseudo-
curvature and roughness.
Figure 23: Left: a family of curves sharing their sec-
ond eigenvectors (in red) with different orientations of the
pseudo-tangents at endpoints (in blue). The variation of the
valley sharpness, induced by the pseudo-tangent variation,
impacts the roughness. Right: a G
(1)
continuity curve with
a ”second-order” roughness.
8 CONCLUSION
In this study, we propose a method to address the sec-
ond derivative behavior of fractal curves by introduc-
ing a notion of pseudo-curvature. By fractal curves, we
mean self-similar curves described with iterated func-
tion systems (IFS). These curves are completely de-
fined from the set of operators of the IFS and result
from a deterministic iterative process. We introduce the
differential characteristic function (DCF) as a central
tool to analyze the differential behavior of the iterative
computations. We define a family of DCFs which ab-
stracts the complexity of the iterative process around
each fixed point. Finally, from this family of DCFs,
we obtain a range of curvatures defining the pseudo-
curvature of the fractal curve. We study the different
configurations of possible pseudo-curvatures according
to operators’ eigenvalues and eigenvectors. These re-
sults, stated for fixed points, are propagated to dyadic
points thanks to the self-similarity property. We pro-
vide examples of various differential situations of frac-
tal curves. The illustrations show, qualitatively, the rel-
evance of this pseudo-curvature, as the range of oscu-
lating circles closely matches the curve. Note that all
results are illustrated with planar fractal curves, but com-
putations are conducted without such an assumption. All
results remain valid for a non co-planar set of control
points defined in R
3
, inducing a non planar curve. Inde-
pendently of the differential property, the DCF is a use-
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
186

ful tool to leverage geometric intuition to facilitate the
analysis of self-similar fractals.
These results should be straightforwardly extended
to tensor product surfaces. Their bidirectional structura-
tion generally induces combinations of unidirectional
configurations. However, we must focus carefully on
non-tensor surfaces, which are more complex construc-
tions that generate surfaces with random appearances
(see Figure 25). For example, complex eigenvalues
avoided for curves will produce interesting vortex effects
for surfaces.
We also have to study the relation between the
roughness and the differentiable characteristics in detail.
Roughness is characterized by oscillation frequency (de-
pending on the operator contraction) and oscillation am-
plitude (depending on the pseudo-tangent and curvature
range). We need to formalize these relations to provide
an intuitive and accurate control of roughness.
Figure 24: Example of two curves designed with 3 opera-
tors and 7 control points.
Figure 25: Left: tensor product surface created from a frac-
tal curves. Right: a more complex non-tensor product frac-
tal surface, built from 4 operators and 8 control points.
REFERENCES
Allaart, P. C. and Kawamura, K. (2010). The improper
infinite derivatives of takagi’s nowhere-differentiable
function. Journal of Mathematical Analysis and Ap-
plications, 372(2):656–665.
Allaart, P. C. and Kawamura, K. (2012). The takagi func-
tion: a survey. Real Analysis Exchange, 37(1):1–54.
Barnsley, M. F. (2014). Fractals everywhere. Academic
press.
Bensoudane, H. (2009). Etude diff
´
erentielle des formes
fractales. PhD thesis, Universit
´
e de Bourgogne.
Bensoudane, H., Gentil, C., and Neveu, M. (2009). Frac-
tional half-tangent of a curve described by iterated
function systems. Journal Of Applied Functional
Analysis, 4(2):311–326.
Bigerelle, M., Nianga, J.-M., Najjar, D., Iost, A., Hubert,
C., and Kubiak, K. (2013). Roughness signature of tri-
bological contact calculated by a new method of peaks
curvature radius estimation on fractal surfaces. Tribol-
ogy International, 65:235–247.
Bolzano, B. (1851). Paradoxes of the Infinite. Leipzig, C.H.
Reclam.
Cavalier, A., Gilet, G., and Ghazanfarpour, D. (2019). Lo-
cal spot noise for procedural surface details synthesis.
Computers and Graphics, 85:92–99.
Chermain, X., Sauvage, B., Dischler, J.-M., and Dachs-
bacher, C. (2021). Importance sampling of glittering
BSDFs based on finite mixture distributions. In Proc.
of Eurographics Symposium on Rendering, pages 45–
53.
Cook, R. L. and DeRose, T. (2005). Wavelet noise. ACM
Trans. Graph., 24(3):803–811.
Daoudi, K., L
´
evy V
´
ehel, J., and Meyer, Y. (1998). Con-
struction of continuous functions with prescribed local
regularity. Constructive Approximation, 14:349–385.
Fournier, A., Fussell, D., and Carpenter, L. (1982). Com-
puter rendering of stochastic models. Communica-
tions of the ACM, 25(6):371–384.
Gentil, C., Gouaty, G., and Sokolov, D. (2021). Geometric
Modeling of Fractal Forms for CAD. John Wiley &
Sons.
Gilet, G., Sauvage, B., Vanhoey, K., Dischler, J.-M.,
and Ghazanfarpour, D. (2014). Local random-phase
noise for procedural texturing. ACM Trans. Graph.,
33(6):1–11.
Hardy, G. H. (1916). Weierstrass’s non-differentiable func-
tion. Transactions of the American Mathematical So-
ciety, 17(3):301–325.
Hu, Y. Z. and Tonder, K. (1992). Simulation of 3-D random
rough surface by 2-D digital filter and fourier analysis.
International Journal of Machine Tools and Manufac-
ture, 32(1-2):83–90.
Hutchinson, J. (1981). Fractals and self-similarity. Indiana
Univ. Math. J., 30:713–747.
Lagae, A., Lefebvre, S., Drettakis, G., and Dutr
´
e, P. (2009).
Procedural Noise using Sparse Gabor Convolution.
ACM Transactions on Graphics, 28(3):54–64.
Mandelbrot, B. B. (1977). Fractals: Form, Chance, and
Dimension. W.H. Freeman.
Moalic, H., Fitzpatrick, J., and Torrance, A. (1987). The
correlation of the characteristics of rough surfaces
with their friction coefficients. Proc. of the Institution
of Mechanical Engineers, Part C: Journal of Mechan-
ical Engineering Science, 201(5):321–329.
Morlet, L., Gentil, C., Lanquetin, S., Neveu, M., and Baril,
J.-L. (2019). Representation of nurbs surfaces by con-
trolled iterated functions system automata. Computers
& Graphics, 2:100006.
Nayak, S. R., Mishra, J., and Palai, G. (2019). Analysing
roughness of surface through fractal dimension: A re-
view. Image Vis. Comput., 89:21–34.
Nowicki, B. (1985). Multiparameter representation of sur-
face roughness. Wear, 102(3):161–176.
Pavie, N. (2016). Mod
´
elisation par bruit proc
´
edural et
rendu de d
´
etails volumiques de surfaces dans les
sc
`
enes virtuelles. PhD thesis, Universit
´
e de Limoges.
Perlin, K. (1985). An image synthesizer. SIGGRAPH Com-
put. Graph., 19(3):287–296.
Pseudo-Curvature of Fractal Curves for Geometric Control of Roughness
187

Podkorytov, S. (2013). Tangent spaces for self-similair
shapes. Phd thesis, Universit
´
e de Bourgogne.
P
´
erez-R
`
afols, F. and Almqvist, A. (2019). Generating ran-
domly rough surfaces with given height probability
distribution and power spectrum. Tribology Interna-
tional, 131:591–604.
Schaefer, S., Levin, D., and Goldman, R. (2005). Subdivi-
sion Schemes and Attractors. Symposium on Geome-
try Processing, pages 171–180.
Sokolov, D., Gouaty, G., Gentil, C., and Mishkinis, A.
(2015). Boundary controlled iterated function sys-
tems. In Curves and Surfaces: 8th International Con-
ference, Paris, pages 414–432.
Stam, J. (2001). An illumination model for a skin layer
bounded by rough surfaces. In Proc. of the Eurograph-
ics Workshop on Rendering Techniques, page 39–52.
Thim, J. (2003). Continuous Nowhere Differentiable Func-
tions. Master’s thesis, Lule
˚
a University of Technol-
ogy.
Walter, B., Marschner, S. R., Li, H., and Torrance, K. E.
(2007). Microfacet models for refraction through
rough surfaces. In Proc. of the Eurographics Confer-
ence on Rendering Techniques, page 195–206.
Wang, Y., Azam, A., Wilson, M. C., Neville, A., and Mo-
rina, A. (2021). Generating fractal rough surfaces with
the spectral representation method. Proc. of the In-
stitution of Mechanical Engineers, Part J: Journal of
Engineering Tribology, 235(12):2640–2653.
Warszawski, K. K., Nikiel, S. S., and Mrugalski, M. (2019).
Procedural method for fast table mountains modelling
in virtual environments. Applied Sciences, 9(11).
Whitehouse, D. J. (1982). In Rough surfaces (Ed. T. R.
Thomas). Digital techniques.
Zair, C. E. and Tosan, E. (1996). Fractal modeling us-
ing free form techniques. Computer Graphics Forum,
15(3):269–278.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
188
