
Analysis of Student-Problems While Working with Physical Computing
Devices
Eric Sch
¨
atz
a
, Lutz Hellmig
b
and Alke Martens
c
Institute of Computer Science, University of Rostock, Albert-Einstein-Straße 22, 18059 Rostock, Germany
Keywords:
Physical Computing, Student Problems, Student Assumptions, STEM.
Abstract:
During physical computing events, we have offered to school-students, we have observed different problems
students struggle with while working with sensors and actuators of physical computing devices. Whereas
some problems have been caused by simple programming errors, some of them were not explainable just
by the code. In those cases, programs worked correctly in simulations but not on the real device. In this
paper looked at different error origins in context of working with physical computing devices. For further
analysis, proposed a model of different stadiums, data passes while a task or problem is solved with a physical
computing application. Using this model, located observed issues in order to identify wrong assumptions,
made by students.
1 INTRODUCTION
From a number of teachers, we have worked with dur-
ing physical computing workshops, we got the feed-
back that they keep running into several problems us-
ing physical computing devices in class. Even though
they really enjoyed working on that topic during our
workshops, they speak of many pitfalls which detain
them of integrating physical computing in several sit-
uations in their lecture. Some of the stated doubts
have also been observed by Schmalfeldt and Przy-
bylla in (Schmalfeldt and Przybylla, 2021). Many
teachers also claimed the usage of physical comput-
ing in class needs way more preparation time as a
class without physical computing. Another big con-
cern was physical computing devices may lead to too
many and diverse problems which makes it hard for a
teacher to provide help for students and makes class
too discerning for their students. Teachers told us,
they use physical computing only where it is explic-
itly mentioned in the curriculum and if though, only
in a very basic way: For example they avoided using
the calliope(Calliope, 2022) with extentiones such as
the Callibot (Scheglmann, 2023). As we noticed that
those concerns where typically expressed by teach-
ers which did not study computer science and were
a
https://orcid.org/0009-0009-7866-1128
b
https://orcid.org/0009-0002-2942-765X
c
https://orcid.org/0000-0002-9411-920X
struggling with some of the given tasks themselves,
this feedback led us to the question how upcoming
student issues can be systematized and on which false
assumptions they are based. Our aim is to identify sig-
nificant origins for struggle of students while work-
ing with different physical computing devices in order
to guide students and teachers to overcome the prob-
lems.
We did a pilot-study to get a list of exemplary is-
sues, students struggle with while working with while
working with physical computing devices. In order to
systematize the issues, we defined categories of ori-
gins. To locate the issue origins, we are developed
a model of how information is processed in different
stadiums in a a physical computing device. Based on
that model, teacher-interventions can be investigated.
2 OBSERVATION OF DIFFERENT
STUDENT ISSUES DURING A
PILOT STUDY
2.1 Pilot-Study in Context of a
Computer Science Competition
In order to get an overview of different issues, stu-
dents struggle with, we did a pilot-study in the context
of a computer science competition our work group is
322
Schätz, E., Hellmig, L. and Martens, A.
Analysis of Student-Problems While Working with Physical Computing Devices.
DOI: 10.5220/0012590000003693
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Computer Supported Education (CSEDU 2024) - Volume 1, pages 322-329
ISBN: 978-989-758-697-2; ISSN: 2184-5026
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

involved to. This competition (its name is Landes-
olympiade Informatik, short: LOI) consisted out of
five preparation- and one competition day. About 45
students coming from different schools from 7th to
9th grade participated in this event. Within this com-
petition, the students worked with robot cars as shown
in Figure 1 which have been designed and built by our
work group.
During the five preparation days, we taught the ba-
sics about the usage of the robots in order to balance
different backgrounds of the students coming from
different school with a diverse quality of computer
science education. At each preparation day, there was
always one employee from our work group accompa-
nied by two to four university students.
For this work, we concentrate on the observations
we made during the preparation days. During those
days, we typically gave learning tasks to the students,
combined with frontal teaching blocks. Most of the
students were working in pairs. If they struggled at a
task, they called for help by one of us.
2.2 Physical Computing Device for a
Computer Science Competition
In preperation of this competition, we designed a
physical computing device and built about 30 exem-
plars. We called it Floid which stands for fancy-
landesolympiade-informatik-device.
Floid is a simple robot car which can be pro-
grammed with the block based development envi-
ronment Microsoft MakeCode. We provide a li-
brary (github.com/eschaetz/loi-mv-sek1) for it,
which contains blocks for all functions and imports
the necessary drivers. The robot uses the BBC Mi-
cro:Bit V1 (Brandhofer and Kastner-Hauler, 2020) as
computing device. Floid has a number of actuators:
• A differential-drive (Haun, 2013) consisting out
of four DC-motors; two on each side. The motors
on each side are wired parallel, which means they
can not be controlled independently. The robot
steers, if the motors at one side rotate faster or in
a different directions than the motors at the other
side.
The in the library included block drive contains
two parameters: steering from -10 to 10 (left to
right) and power from -10 to 10 (full power back-
wards to full power frontwards)
• One NeoPixel, which is a ring of eight RGB-LED
at the bottom of the robot
• One display on the top of the robot which can dis-
play 2x16 characters
On the sensor-side it has :
Figure 1: Floid, a simple robots built by out workgroup,
students were working with during our pilot-study.
• One ultrasonic distance sensor (Type SR04)
• Two digital line-tracking-sensors which return
only 1 for a dark and 0 for a bright surface
All components are shown in Figure 2. Along those
robot-specific components, students can use the sen-
sors which are built-in to the Micro:Bit, such as radio,
an ambient-light sensor, an accelerometer and two
buttons (Brandhofer and Kastner-Hauler, 2020)(Mi-
crobit Foundation, 2020)(H
¨
uwe and H
¨
uwe, 2019).
The robot is powered by a power-bank which is in the
bottom of the robot. The chassis is completely 3D-
printed. This way, the robot looks really unique and
we can easily reproduce and replace broken parts or
develop new extensions for it.
All in all this robot is quite susceptible for defects,
which are typically easy to repair. In the case of our
study, this can be seen as an advantage, since that gave
us the opportunity to observe how students realize de-
fects and how they handle them.
2.3 Observed Student-Statements
Students typically described error symptoms to us but
called it error. Those symptoms looked quite diverse
but can be summarized in the following seven most
significant observed-statements (OS).
• OS1. Robot doesn’t start moving
• OS2. Motors rotate with different speeds, even
though the set speed did not change (this is espe-
cially a problem in turns, as a 90° turn can take
1000 ms up to 1500 ms or even more)
• OS3. Data shown on the display is not correct
• OS4. Line-Tracking-Sensors don’t recognize a
line
• OS5. Values from distance are not correct
• OS6. Pressed buttons are not recognized
• OS7. Received radio signals are not recognized
Analysis of Student-Problems While Working with Physical Computing Devices
323
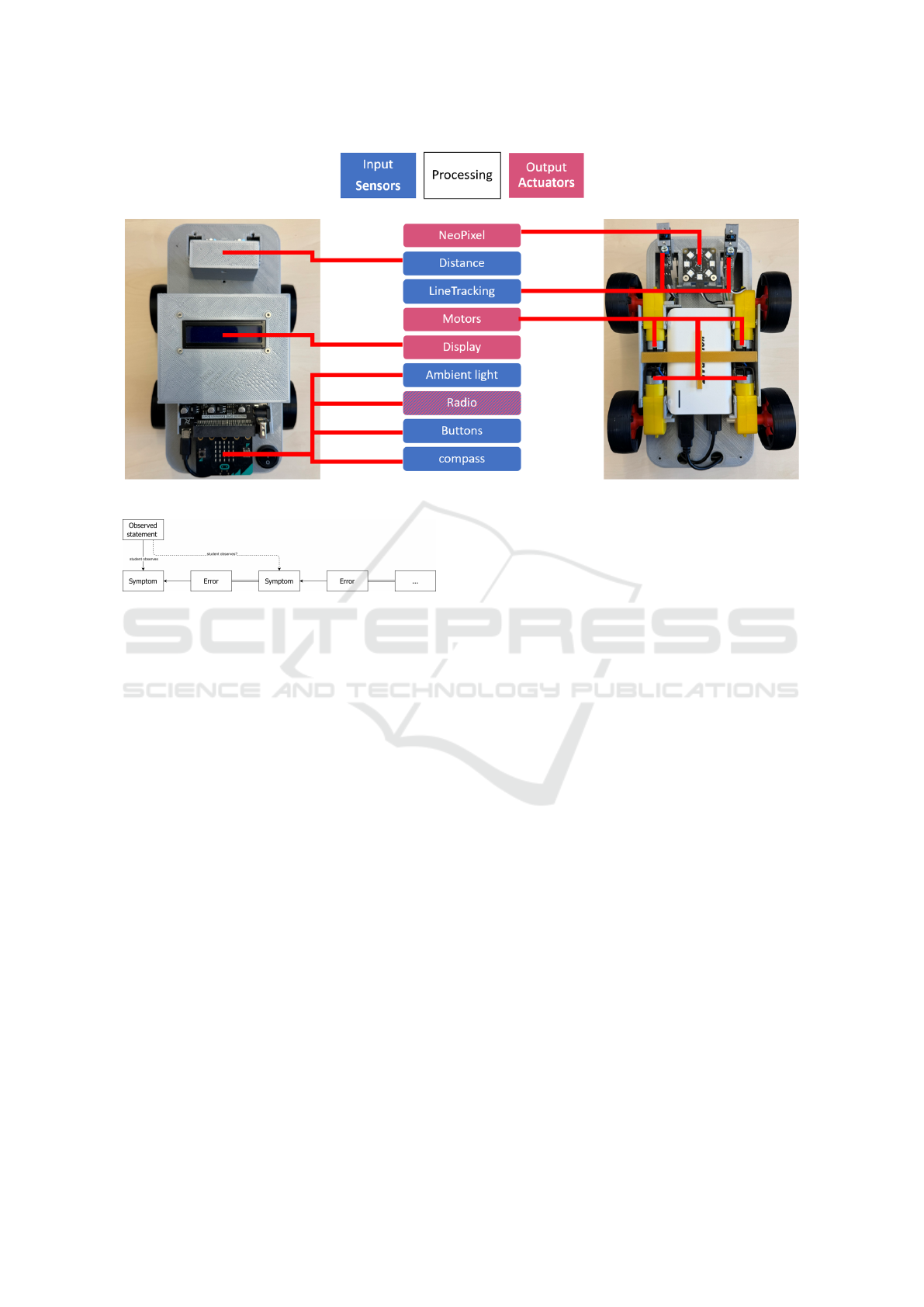
Figure 2: Components of Floid.
Figure 3: Errors causing symptoms which can be symptoms
itself caused by other errors.
3 ISSUE ORIGIN
3.1 Student Statement vs. Symptom vs.
Error
Students typically told us they have an error but most
of the time described an error symptom. The errors
which caused the symptoms were quite diverse. At
this point it needs to be said, an error, which causes a
symptom, can sometimes be a symptom resulting of
another (deeper) error. Referring to Figure 3, differ-
ent students described symptoms at different stages.
In order to fix the students issue, it is necessary to
identify the initial error.
3.2 Different Categories of Origins
In many cases, the symptoms were caused by typ-
ical programming errors which were more or less
hard to find while looking at the code. In order to
identify and solve those errors, students use differ-
ent debug strategies as described by Romeike and
Michaeli (Michaeli and Romeike, 2019). However,
those strategies mostly are meant for classical soft-
ware development at a PC and do not focus on physi-
cal computing.
Sometimes, symptoms have been caused by hard-
ware defects for example due a broken motor, a faulty
sensor or a loose wire. These errors can appear on
classroom PCs as well, but this usually happens not
as often as with physical computing devices since
personal computers usually include hardware health
checks and are usually more robust than physical
computing devices like our robots. We built a test
routine which helped us to identify broken parts at the
robot.
In some cases, the observed symptom had its ori-
gin in neither one of those two categories, as the hard-
ware was working all in all appropriate and the soft-
ware seemed to be correct as well but the program still
not worked as it was supposed to. Therefore, there
are errors existing, which are neither resulting from
broken hardware, nor from software bugs, students
made. This leads us to define a third error category:
Sometimes error-symptoms are caused by hardware
specific reasons, meaning hardware is used in an in-
appropriate way by disregarding hardware specifica-
tions.
In conclusion the observed errors can be divided
into three categories:
1. Category A. Student Caused Bug
Those errors are caused by the students.
2. Category B. Hardware Specification Errors
Errors, which appear when hardware is used in an
inappropriate way.
3. Category C. Hardware Defect
Errors which are caused by broken components
CSEDU 2024 - 16th International Conference on Computer Supported Education
324
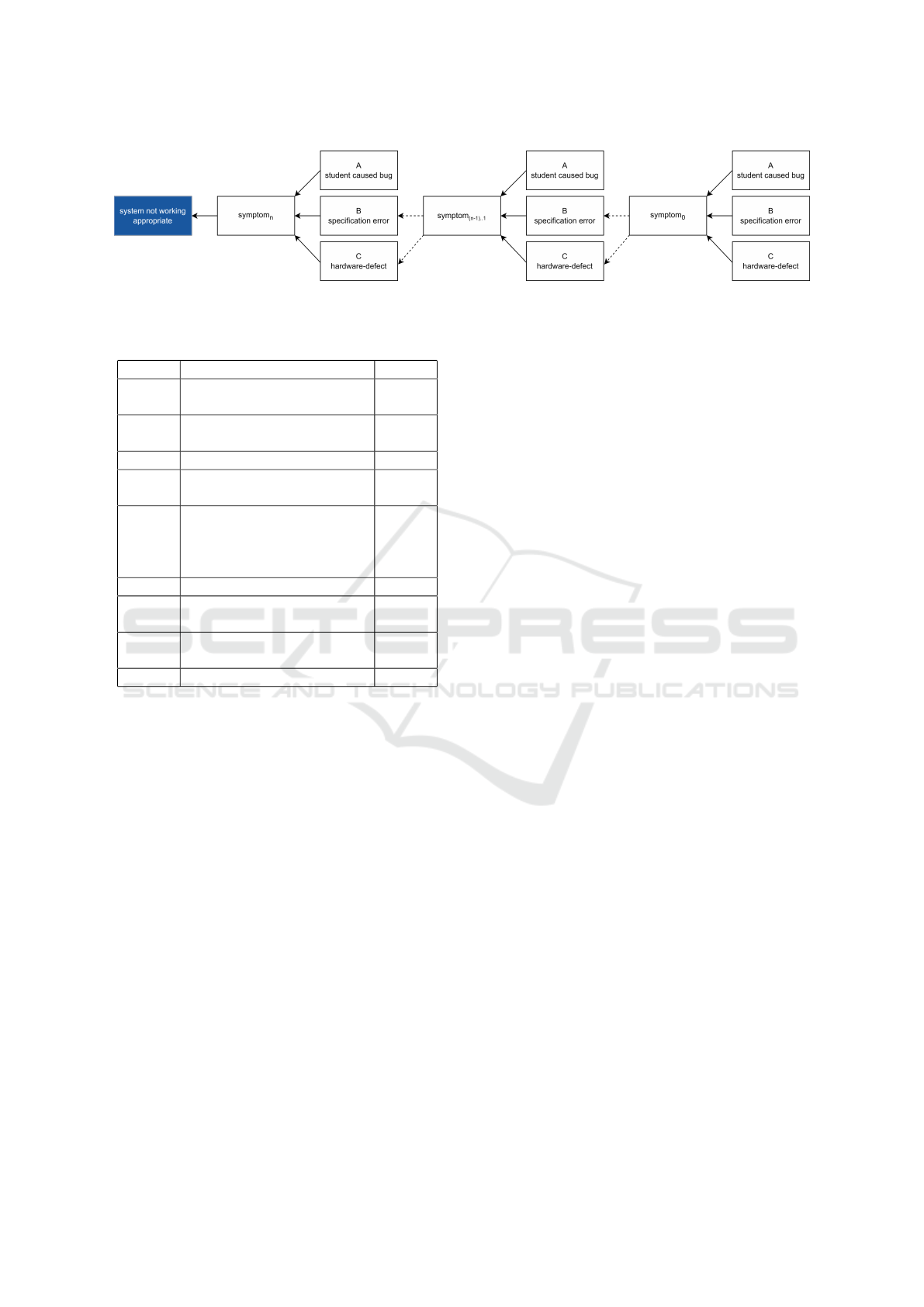
Figure 4: Errors from one category causing errors from another one.
Table 1: Examples of hidden errors from different origin
categories.
Hidden error (exemplary) Origin
OS1 Program is stuck in an infi-
nite loop
A
OS1 Motor is not given enough
power
B
OS1 Motor is broken C
OS3 Wrong variable is shown on
display
A
OS3 Two threads are trying to ac-
cess the display simultane-
ously which leads to inter-
fering data on the I²C Bus
B
OS3 Loose wire C
OS5 Measurement is set to inches
instead of centimeters
A
OS5 Sensor values are oscillating
and need to be smoothed
B
OS5 Sensor is physically broken C
As shown in Figure 4, errors from one category can
cause errors from another one.
The examples stated in Table 1 show, a symptom
can be caused by several errors coming from differ-
ent categories. This increases the complexity of find-
ing errors while working with physical computing de-
vices significantly.
3.3 Borders Between Those Categories
For some examples shown in 1, the category are quite
clear and easy to determine. However, in some cases
the border between two categories can be fluent. If
a hardware component is not used in an appropriate
way, this can also be seen as a software bug. However,
from the view of a student, the software is correct.
The border between categories A and B can be de-
fined by using a simulation software of the robot: If
the program is working in the simulation but not on
the real device, than the error is from category B or
C, if it does not work in the simulation, than it is in
category A. Off course this border depends on which
special cases are included in the used model of the
simulation software. This way, the border can be de-
fined starting from category A.
The border between B and C can be defined by
hardware tests: If the hardware passes the test, than
the error is from A or B, if it fails, than it is from C.
This procedure requires hardware-tests which detect
every kind of hardware anomaly. This way the border
is defined outgoing from category C.
In conclusion category B combines all errors
which are in between those two borders and can only
be defined from the outside, nearing from both neigh-
bor categories. This leads to the insight, that category
B is an abstract category: In case a provided simula-
tion software to the robot is complete and a provided
hardware test detects every hardware anomaly, every
error would either be in A or C. However, a complete
simulation is almost impossible to create, since the
underlying model would need to include every sin-
gle behavior of the device and every relevant physical
law.
The approach of defining the border between A
and B via a simulation has its weak point as there is
not a simulation software available for every physical
computing device. In this case, a simulation can be re-
placed by assumptions students have about the robot:
As every simulation application is based on a model
of the device, a student is creating a program assum-
ing different behavior patterns of the device. Mean-
ing every student has its own model of the robot in
its head. This leads to the insight, that the border be-
tween A and B can be individual for each student: If a
student assumes a motor is rotating once it gets elec-
tricity than the error would be in B, if the provided
power is not enough for the motor to turn. If a student
is aware, that there is a minimum of power a motor
needs, than the problem is in A for this particular stu-
dent.
Analog to a disappearing category B if a complete
simulation exists, there would be no category B if a
student understands every particular part of a device
and has no black-box left. This scenario is as unreal-
istic as a complete simulation.
Concluding, the more complex a device is, the
more it is unrealistic to create a complete model of it,
either in context of a simulation or in a students head.
Analysis of Student-Problems While Working with Physical Computing Devices
325
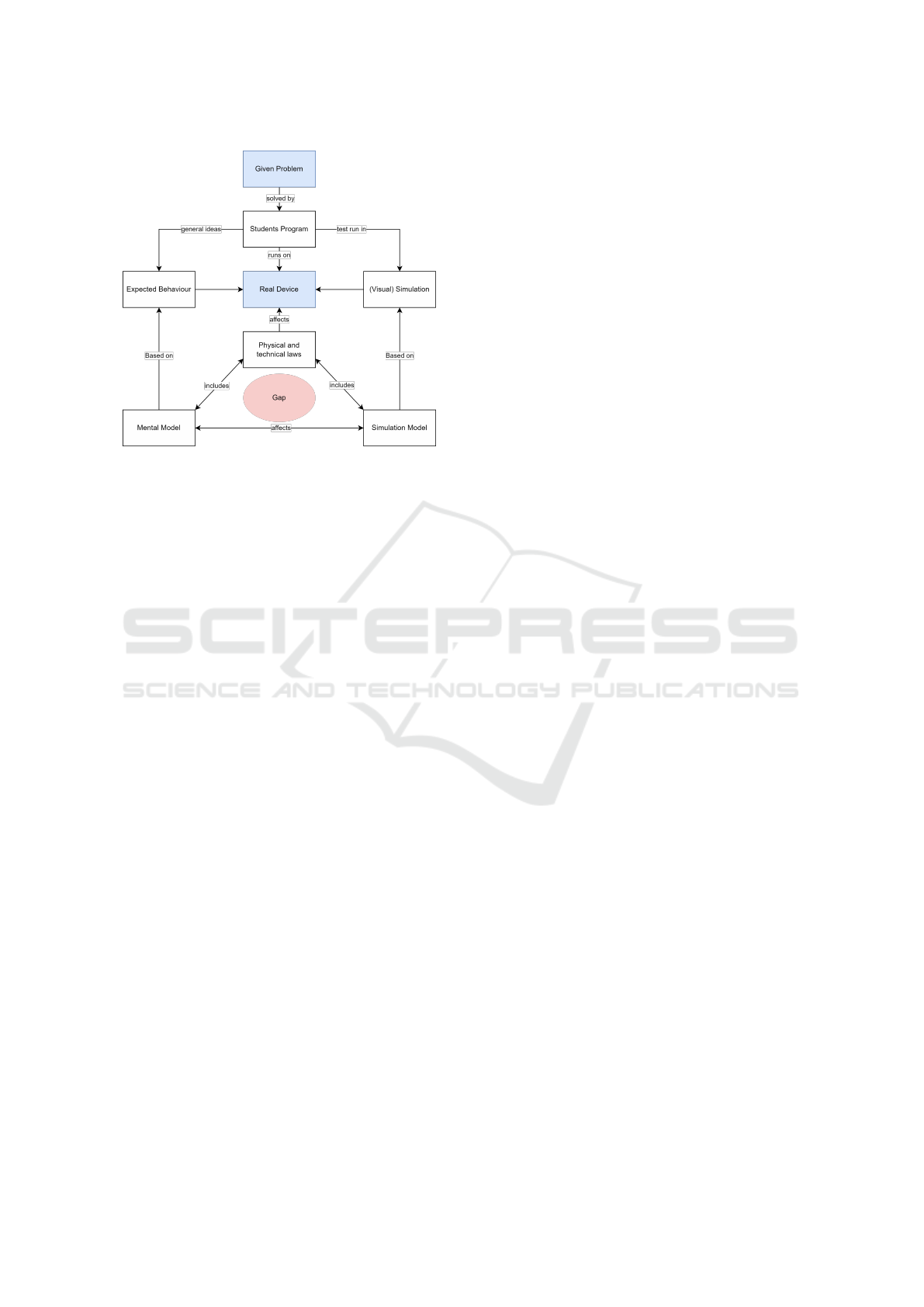
Figure 5: Origin category B can be seen as the gap between
students’ mental models of the device or a simulation model
and the physical and technical laws.
This leads to the point of an always existing category
B with fluent borders. It can been interpreted as the
gap between the physical and technical laws and the
students’ mental model of the robot or the simulation
model as shown in Figure 5.
We have observed that students tend to assume the
problem causing their symptom is located in A or C. If
they were not able to find an error in A they frequently
claimed their robot is broken. Not only a large num-
ber of students had problems identifying errors in B,
many students also did not realize the existence of a
category B.
4 DATA HANDLING IN
PHYSICAL COMPUTING
DEVICES
As physical computing stands for the student activity
of developing computer systems which interact with
their environment via sensors and actuators (Przy-
bylla and Romeike, 2017), errors can appear not only
in the procession of data but also in the generation of
sensor values or during the action performance of an
actuator. Thus, in contrast to pure virtual program-
ming (e. g. a console program or scratch), student’s
have to care not only about the P of the IPO-model
but also on the I and O. Therefore a closer look on
this parts in necessary.
4.1 Sensor Data Handling
Sensors are often seen as black-boxes, especially by
students. However, in order to understand and solve
specification errors, it may be helpful to have some
knowledge about their basic functionality. Thus, we
are proposing an abstract model of six stadiums of
sensor data.
The model is outgoing from a given problem (sta-
dium I0) which can be named explicitly in a task or
can appear implicitly while solving another problem.
In order to solve the given problem, a physical com-
puting device is monitoring a technical observable
natural behavior (stadium I1) using sensors which
determines a value on a basis of physical laws. As a
result, a sensor provides analogous signals (stadium
I2) with a continuous domain. Those signals need
to be converted into digital values (stadium I3) on a
discrete value margin. While the digital values repre-
sent the output of the sensor, the data needs to be con-
verted into a common measurement (stadium I4) in
order to be comparable to requirements in the given
tasks or data from other sensors. Depending on the
functionality of the sensor, the data can be of differ-
ent quality. Due mathematical smoothing algorithms
the raw values can be converted into verified values
(stadium I5).
The steps to get information from one stadium to
another address various STEM-disciplines, as illus-
trated in Figure 6.
Different devices and components return the value
at different states to the student: The ambient-light
sensor of the BBC Micro:Bit for example returns the
values after stadium I3 (Microbit Foundation, 2020),
while distance values of the ultrasonic sensor SR04
are returned in centimeters which is stadium I4. Thus,
I4 and I5 are optional stadiums as illustrated in Figure
6.
4.2 Proposal of an Extended IPO-Model
The proposed model in Figure 6 addresses only the
process of generating sensor-data. However, errors
may also appear during the performance of an actua-
tor. Therefore, the model needs to be extended by the
output components.
The program of the students affects the processing
part of the IPO-Model and controls the output compo-
nents, in this case the actuators.
In our model, actuators get data either in form of
a common measurement (stadium O0) or as digi-
tal data (stadium O1). This data gets converted into
analog signals affecting the actuating components
(stadium O2). Therefore, the actuator is performing
CSEDU 2024 - 16th International Conference on Computer Supported Education
326
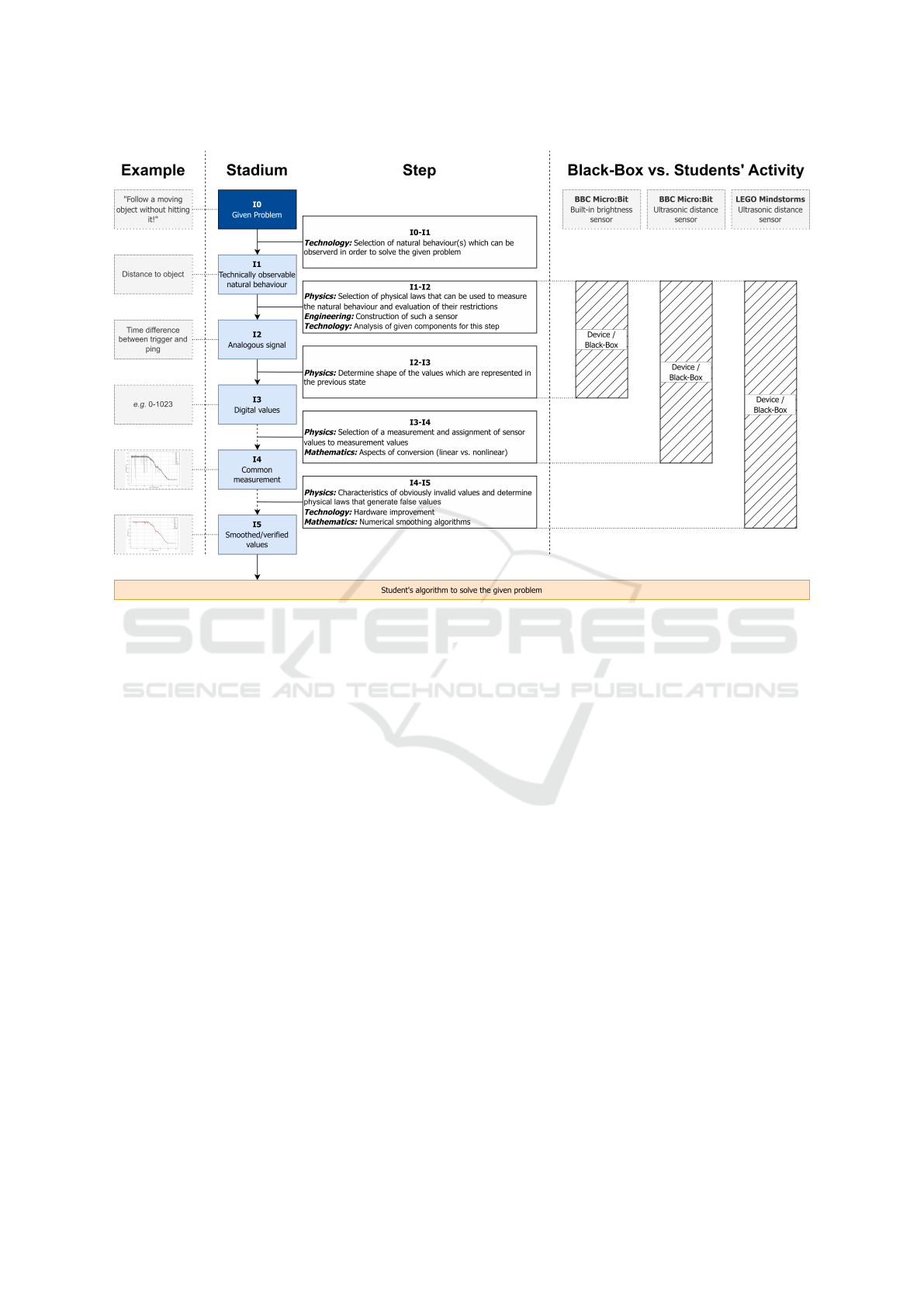
Figure 6: Process of generating data via sensors though different stadiums.
the action (stadium O3). In some cases, the problem
is solved (stadium O5) at this point, in other cases
a verification (stadium O4) takes place. This can ei-
ther be done by a student which would lead to state I1,
meaning that sensors need to verify the action of the
actuator or by hardware implemented self correcting
routines (stadium O4b).
As the model now includes the whole journey,
data goes through a physical computing system, in-
cluding input and output components, it can be seen
as an extended or more detailed IPO-Model.
As shown in Figure 7, this process is not always lin-
ear, as several states are optional and data can take
a loop through the model. Different devices, such
as Lego Mindstorms (LEGO Group, 2022), OzoBot
(Ozo Edu Inc., 2022), BBC Micro:Bit (Microbit
Foundation, 2020), Calliope Mini (Calliope, 2022),
Sphero Bolt (Sphero, 2022) are very diverse and re-
turn data at different stadiums to the student. Thus,
students have to do some steps themselves in order
to work with data in different stadiums, while some
parts are hidden in black-boxes as shown in Figure 6.
4.3 Error Focuses Within Extended
IPO-Model
While students run through the Physical Computing
Process proposed by Schulz and Pinkwart (Schulz and
Pinkwart, 2016) they have to think about different
connections between the stadium of our model at dif-
ferent places during this process. For example when
they are at the point of choosing input and output they
have to think about how to come to stadiums I1 and
O3. Depending on the chosen device, they don’t need
to care about some steps and stadiums at this point.
However, while ”identify the problem” in ”evalua-
tion” of the Physical Computing Process (Schulz and
Pinkwart, 2016), we have observed during our pre-
study they have to think about all stadiums, as symp-
toms can be caused by errors from each category. Er-
rors usually appear during the steps between different
stadiums. Certain errors sometimes can only be from
certain origin categories as shown in Figure 7.
5 DISCUSSION
Our model may help to differ errors from different
origins. Due different strategies, the amount of errors
Analysis of Student-Problems While Working with Physical Computing Devices
327
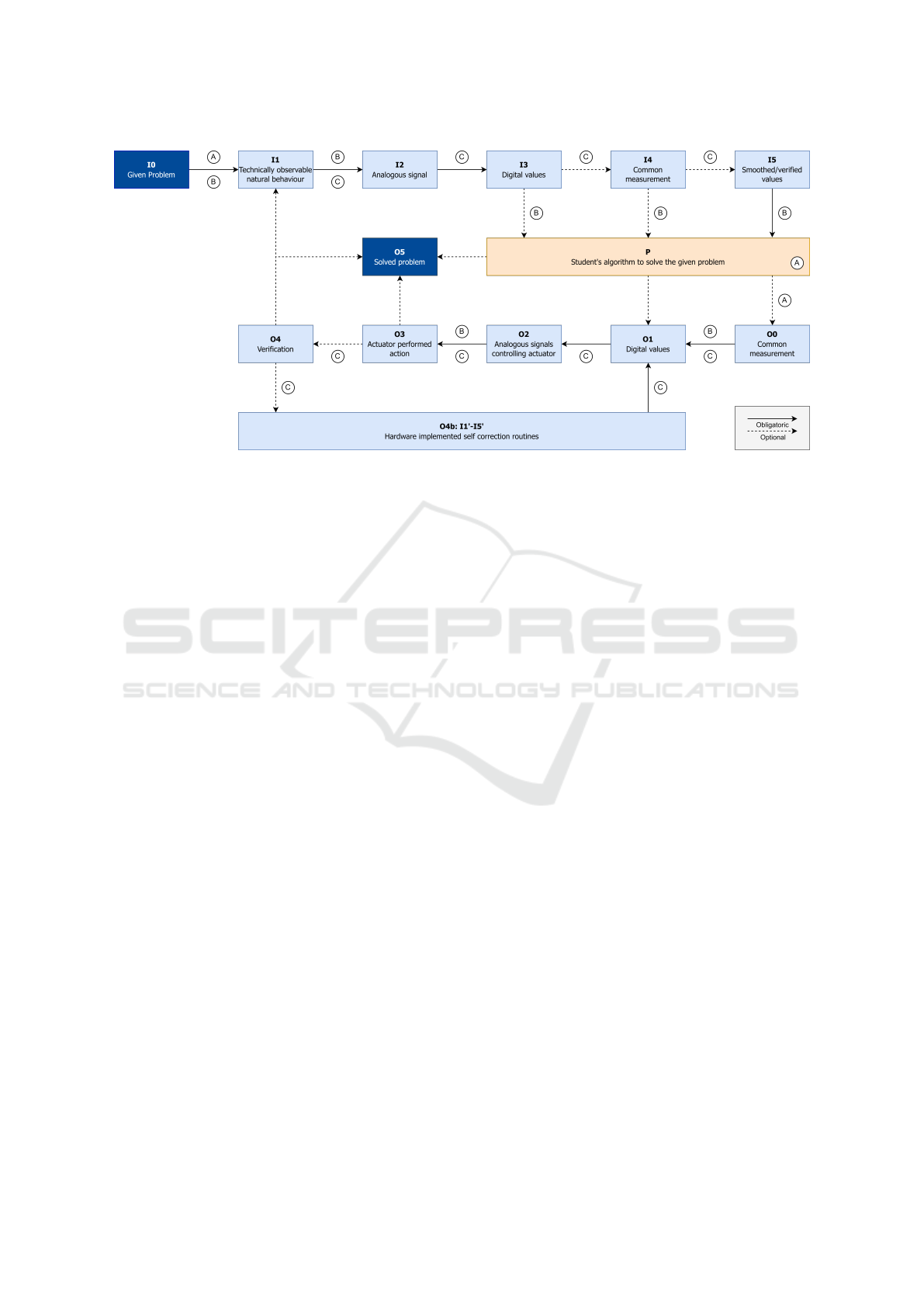
Figure 7: Extended IPO-Model according to data in physical computing applications.
can be in- or decreased, for example can the devel-
opment environment help to reduce errors from cat-
egory A and until a certain point also from category
B. The usage of a more robust device may reduces
the number errors from category C. However, a sys-
tem is never going to be complete and errors are al-
ways possible. From a pedagogical perspective, this
insight leads to the question about the pedagogical po-
tential of errors from different categories. It needs to
be deliberated between the frustration students gener-
ate if a device doesn’t work as supposed to and they
don’t find the error in their program and how prob-
lems from different categories force students to de-
velop and practice strategies to ensure the problem is
neither from B or C; and if so, how to locate it. It
needs to be determined, whether this helps reaching
standards of computer science education as for exam-
ple Bildungsstandards Informatik (R
¨
ohner, 2016) or
if the fears of the teachers of our workshop were cor-
rect and those errors overcharge students and teachers
as well.
6 CONCLUSION
In this work, we have designed a pilot-study in order
to find out exemplary issues, students struggle with,
while working with physical computing devices. For
this study, we have constructed out own physical com-
puting device Floid in appereance of a robot car. This
device is unique and generates several issues, which
can be seen as an advantage for our scientific purpose
– a more robust device may lead to less issues, but
there are most likely be some issues left. Our device
gave us the opportunity observing students, how they
handeled those issues.
We developed a model of different issue origins and
connected the observed issues to those categories.
Even though quite some issues were caused by the
device, there were also some of them caused by stu-
dents programs or by disregarding specifications.
In order to locate the issues and errors from different
categories, we developed a model of stadiums, infor-
mation passes in a physical computing device. This
model can be seen as an extended or more detailed
IPO-model.
7 OUTREACH
As mentioned, the study was still a pilot-study. We
are going to repeat it the upcoming fall. as the focus
on the pilot-study was evaluating which issues stu-
dents struggle with, our aim is to evaluate different
interventions during the next study.
REFERENCES
Brandhofer, G. and Kastner-Hauler, O. (2020). Der
micro:bit und Computational Thinking. Lehr-
Lernprozesse gestalten, analysieren und evaluieren
(2020), page 20.
Calliope (2022). Calliope.
Haun, M. (2013). Handbuch Robotik: Programmieren und
Einsatz intelligenter Roboter. Springer Berlin Heidel-
berg, Berlin, Heidelberg.
H
¨
uwe, P. and H
¨
uwe, S. (2019). IoT at Home: Smart Gad-
gets mit Arduino, Raspberry Pi, ESP8266 und Cal-
liope entwickeln. #makers do it. Hanser, M
¨
unchen.
CSEDU 2024 - 16th International Conference on Computer Supported Education
328

LEGO Group (2022). MINDSTORMS EV3 | MINT ab der
neunten Klasse.
Michaeli, T. and Romeike, R. (2019). Debuggen im Unter-
richt – Ein systematisches Vorgehen macht den Unter-
schied. In Informatik f
¨
ur alle. Gesellschaft f
¨
ur Infor-
matik.
Microbit Foundation (2020). The new BBC micro:bit with
speaker and microphone.
Ozo Edu Inc. (2022). Ozobot | Robots to code and create
with.
Przybylla, M. and Romeike, R. (2017). Von Eingebetteten
Systemen zu Physical Computing. In Informatische
Bildung zum Verstehen und Gestalten der digitalen
Welt, pages 257–266, Oldenburg.
R
¨
ohner, G. (2016). Bildungsstandards Informatik - Sekun-
darstufe II. page 88.
Scheglmann, R. (2023). Calli:Bot – unsere-schule.org.
Schmalfeldt, T. and Przybylla, M. (2021). Erhebungsinstru-
ment f
¨
ur
¨
Uberzeugungen zum Physical Computing. In
Bildung von Lehrkr
¨
aften in allen Phasen.
Schulz, S. and Pinkwart, N. (2016). Towards Support-
ing Scientific Inquiry in Computer Science Educa-
tion. In Proceedings of the 11th Workshop in Primary
and Secondary Computing Education, pages 45–53,
M
¨
unster Germany. ACM.
Sphero (2022). Coding Robot: Sphero BOLT | Teach
STEM for Kids.
Analysis of Student-Problems While Working with Physical Computing Devices
329
