
Improve Bounding Box in Carla Simulator
Mohamad Mofeed Chaar
a
, Jamal Raiyn
b
and Galia Weidl
c
Connected Urban Mobility, Faculty of Engineering,
University of Applied Sciences, Aschaffenburg, Germany
Keywords:
Bounding Box, Carla Simulator, Object Detection, Deep Learning, Yolo.
Abstract:
The CARLA simulator (Car Learning to Act) serves as a robust platform for testing algorithms and generating
datasets in the field of Autonomous Driving (AD). It provides control over various environmental parameters,
enabling thorough evaluation. Development bounding boxes are commonly utilized tools in deep learning and
play a crucial role in AD applications. The predominant method for data generation in the CARLA Simulator
involves identifying and delineating objects of interest, such as vehicles, using bounding boxes. The operation
in CARLA entails capturing the coordinates of all objects on the map, which are subsequently aligned with
the sensor’s coordinate system at the ego vehicle and then enclosed within bounding boxes relative to the ego
vehicle’s perspective. However, this primary approach encounters challenges associated with object detection
and bounding box annotation, such as ghost boxes. Although these procedures are generally effective at
detecting vehicles and other objects within their direct line of sight, they may also produce false positives
by identifying objects that are obscured by obstructions. We have enhanced the primary approach with the
objective of filtering out unwanted boxes. Performance analysis indicates that the improved approach has
achieved high accuracy.
1 INTRODUCTION
The procedure of bounding box in Carla simulation
(Dosovitskiy et al., 2017) is implemented by invoking
the Bounding Box object. This returns a 3D object
box, which we then transform to align with the
sensor’s coordinate system on the ego vehicle, using
vertex transformations as the following formula
(Correll et al., 2022).
P
`
=
R T
0 1
P (1)
Where P = (x,y,z,1) is the map of coordinates and
P
`
= (x
`
,y
`
,z
`
,1) represents the new coordinates with
reference point R to the sensor on the vehicle:
R =
cosθ −sinθ 0
sinθ cosθ 0
0 0 1
(2)
and Translation T is 3x1 matrix (or vector) that trans-
lates a point in 3D space. Subsequently, we identify
all vehicles that fall within the sensor’s field of view,
a
https://orcid.org/0000-0001-9637-5832
b
https://orcid.org/0000-0002-8609-3935
c
https://orcid.org/0000-0002-6934-6347
accounting for its height and width parameters. Fi-
nally, we project the 3D boxes to 2D because we work
with images. In Carla, the bounding box accounts
for the sensor’s coordinates and field of view. How-
ever, it does not consider objects that are obscured
by other structures, such as buildings. To address
this limitation, our methodology involves refining the
detection process. We synchronize the sensor data
with a Semantic Segmentation camera (Dosovitskiy
et al., 2017) By conducting a pixel-by-pixel compar-
ison between the sensor and the Semantic Segmenta-
tion camera, we are able to filter out unwanted bound-
ing boxes effectively (Figure1).
(a) (b)
Figure 1: Comparison between the image before (a) and
after (b) the filter.
Chaar, M., Raiyn, J. and Weidl, G.
Improve Bounding Box in Carla Simulator.
DOI: 10.5220/0012600500003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 267-275
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
267

2 RELATED WORKS
The authors (Niranjan et al., 2021) Operated the Sin-
gle Shot Detector (SSD) to train a data generated by
the Carla simulator, which was created by capturing
1028 images from RGB sensor with size (640x380)
pixels from different maps and different weather con-
ditions. Because of the encountered problems in
Carla with the auto generation of a bounding box
from the simulator, the authors annotated the labels
using Python GUI called labelimg to identify 5 object
classes (Vehicles, Bike, Motorbike, Traffic light, and
Traffic Sign). The paper provides a valuable contri-
bution to the field of autonomous driving research by
demonstrating the effectiveness of using the CARLA
simulator to train and test deep learning-based object
detection models. On the other hand, (Muller, 2022)
generate a new methodology to collect a datasets au-
tomatically, which they filtered the objects by tak-
ing the semantic LiDAR data and remove all objects
which are not in the point cloud of the Lidar sensor.
The issue with the Lidar sensor is its lack of preci-
sion when dealing with distant objects. The sensor’s
accuracy diminishes proportionally with the distance
to the objects. Additionally, it is highly affected by
weather conditions. For instance, when operating in
foggy conditions, it negatively impacts the sensor’s
accuracy. Therefore, we have implemented flexible
criteria that align with this requirement. Further elab-
oration on these points will be presented in this pa-
per. The work of (Mukhlas, 2020) utilized the depth
camera to remove the non-visible vehicles by com-
paring the distance between the ego-vehicle and the
object, i.e. if there is an obstacle, as a building, the
real distance will be bigger than the measurement of
the depth image, then such “ghost” vehicles will be
removed. As we see in the Figure 2 this work is not
accurate enough. Here we find that some objects are
wrongly filtered. The reason for this issue, is that the
distance is dependent on the center of the object and
it does not take into account all object dimensions,
e.g. such as the center of object is covered by ob-
stacle but the object is partially visible (Figure 2).
In addition, this work does not solve the problem of
unwanted box, which covers a significant portion of
an image. In comparison, our work is checking each
pixel in the bounding box, leaves any existing object
(even if only partially visible) and filters any object
which is completely not visible. The authors (Rong
et al., 2020) introduced the LGSVL Simulator, which
is a high-fidelity simulator designed for developing
and testing autonomous driving systems. The simula-
tor provides a comprehensive environment that repli-
cates real-world driving conditions, enabling develop-
Figure 2: In the work of (Muller, 2022) the filter is using
semantic LiDAR. One can see that two objects are filtered
while they should be included in bounding boxed (see both
down images). The significant box (only its red bottom line
is visible (see Up left image)) was not filtered although it
should be. In the filter using depth camera (Up right) one
can still see that the object is existing and visible, although it
has been wrongly filtered (no bounding box was put around
it).
ers to train and evaluate their autonomous vehicle al-
gorithms under various scenarios. The LGSVL Simu-
lator is a powerful tool for developing and testing au-
tonomous driving systems. Its high-fidelity represen-
tation of the real world, end-to-end simulation flow,
customization capabilities, and support for ROS and
ROS2 make it an essential tool for researchers, de-
velopers, and companies working in the autonomous
driving field. In datasets, we could use simulator data
or synthetic data, the paper (Burdorf et al., 2022) in-
vestigates the use of synthetic data to reduce the re-
liance on real-world data for training object detection
models. Object detection is a crucial task in many
computer vision applications, including autonomous
driving, robotics, and surveillance. However, collect-
ing large amounts of high-quality real-world data can
be expensive and time-consuming. Their paper con-
ducts experiment to evaluate the effectiveness of us-
ing synthetic data for object detector training. The
results show that synthetic data can significantly re-
duce the requirement for real-world data, with mixed
datasets of up to 20% real-world data achieving com-
parable detection performance to datasets with 100%
real-world data. Finally, as we are aware there is
a data collected by real images, The Canadian Ad-
verse Driving Conditions (CADC) dataset (Pitropov
et al., 2021) is a publicly available dataset of anno-
tated driving sequences collected in winter conditions
in the Waterloo region of Ontario, Canada. It con-
sists of over 20 kilometers of driving data, including
over 7,000 annotated frames from eight cameras, a li-
dar sensor, and a GNSS+INS system. The dataset is
annotated with a variety of objects, including vehi-
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
268
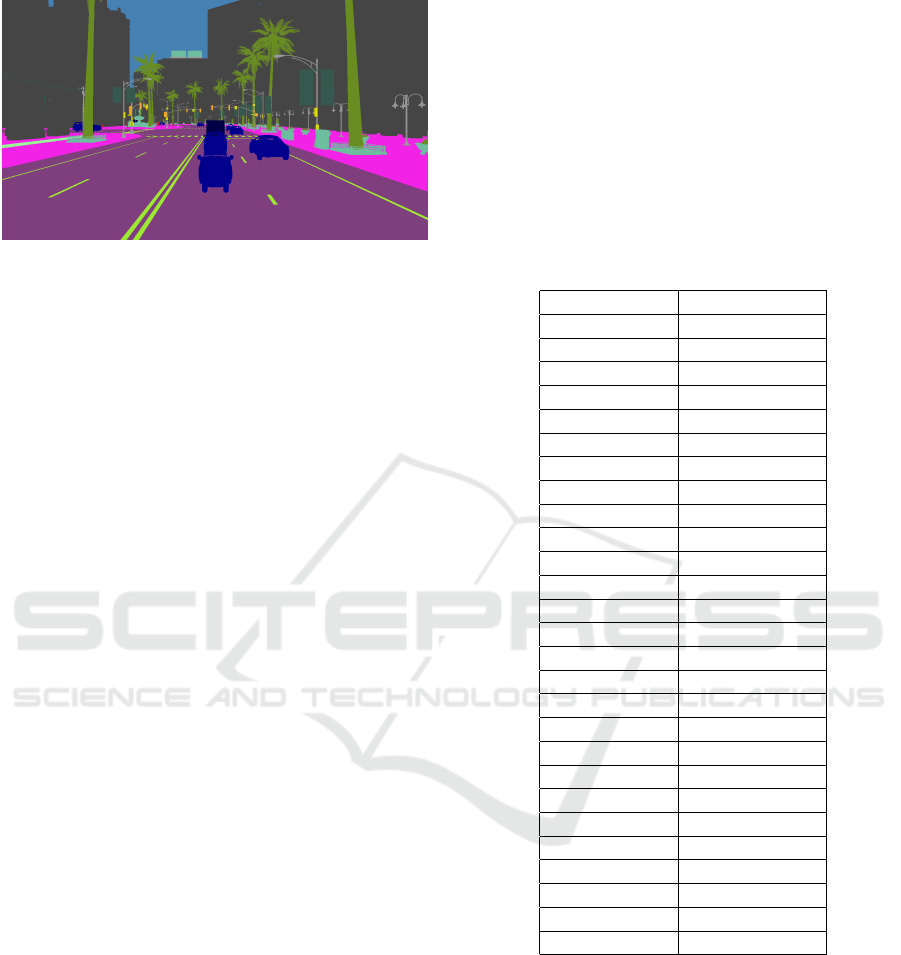
Figure 3: Semantic segmentation camera in Carla Simula-
tor.
cles, pedestrians, cyclists, and traffic signs, as well as
weather conditions, such as snow, rain, and fog. The
CADC dataset is a valuable resource for researchers
and developers working on autonomous driving sys-
tems. Its large size, diverse collection of driving se-
quences, high-quality annotations, and multiple sen-
sor modalities make it a powerful tool for improving
the performance and robustness of autonomous driv-
ing systems in winter conditions.
3 CONTRIBUTIONS
In this work, we have developed a new technique to
collect the necessary data, just by generating it with
Carla simulation (Chaar et al., 2023). Furthermore,
we generated a new package to develop the Carla en-
vironments where we could control on the number of
vehicles, pedestrians, environments, weather, etc by
yaml files. The package, developed by us, is called
carlasimu, and to simplify the work of other devel-
opers, we uploaded it to the GitHub link: (https:
//github.com/Mofeed-Chaar/Improving- bouni
ng-box- in- Carla-simulator). The sensors that we
have used for our developments in the Carla simula-
tor are RGB Camera sensor and Semantic segmenta-
tion camera. You can find our code of the filter at
the GitHub link above. As we are aware, the Seman-
tic segmentation camera gives a special pixels colour
for each object (Figure 3), in Carla simulator there
are 27 classes of objects (Table 1). To improve the
bounding boxes, we applied our work to filter the
“ghost” object, which are occluded by e.g, buildings
and which should not be present in the simulation. Si-
multaneously, we put bounding boxed around exist-
ing objects, which are partially covered by other ob-
jects. The task involves six distinct categories: cars,
buses, trucks, vans, pedestrians, and traffic lights. It
revolves the “ghost” bounding box around invisible
cars, extracting a 2D bounding box, generated by the
Carla simulator and conducting a pixel-wise compar-
ison within the box using a semantic segmentation
camera. The objective is to determine if the pixels
within the box correspond to the object identified by
the image Semantic Segmentation sensor. By this op-
erator, we have got highly accurate results by using
for training the data which has been collected by our
filter (precision = 0. 968, Recall = 0.926, and mAP50
= 0.965) in YOLOv5s. We generated this training
data form 8 maps under clear weather conditions.
Table 1: The colour of objects for Semantic segmentation
camera in Carla simulator.
Class Name Colour (R,G,B)
Unlabelled (0, 0, 0)
Car and Truck (0,0,142)
Bus (0,60,100)
Van (0,0,70)
Bicycle (119,11,32)
Motorcycle (0,0,230)
Building (70, 70, 70)
Fence (100, 40, 40)
Other (55, 90, 80)
Pedestrian (220, 20, 60)
Pole (153, 153, 153)
Road Line (157, 234, 50)
Road (128, 64, 128)
Sidewalk (244, 35, 232)
Vegetation (107, 142, 35)
Wall (102, 102, 156)
Traffic Sign (220, 220, 0)
Sky (70, 130, 180)
Ground (81, 0, 81)
Bridge (150, 100, 100)
Rail Track (230, 150, 140)
Guardrail (180, 165, 180)
Traffic Light (250, 170, 30)
Static (110, 190, 160)
Dynamic (170, 120, 50)
Water (45, 60, 150)
Terrain (145, 170, 100)
4 BOUNDIG BOX IN CARLA
In Carla simulator, the developers use a method which
can generate a bounding box (3D, and 2D) for all
objects in the environment such as vehicles. For
this purpose is used the python class in Carla pack-
age (carla.BoundingBox) - see the code in (Team,
2020).In this section we will discuss the issues in
Auto Bounding box which is generated by Carla sim-
ulator.
The biggest problem appears during the genera-
Improve Bounding Box in Carla Simulator
269

tion of a bounding box in the negative values of the
annotation and for objects, which are occluded by ob-
stacles (Figure 4).
Figure 4: In Carla, as we’ve found out, objects are detected
in bounding box even when they are obscured behind build-
ings. This affects data generation, where some labels of
bounding boxes are false positives, impacting the accuracy
of training data.
4.1 Negative Value in Annotations
The procedure of the bounding box in the Carla simu-
lator: The bounding box is taken from all the environ-
ment, and we choose all the objects in the front of the
sensor with respect to the FOV (Field of View) and
vertical to the image in the sensor. The issue in this
case is that some objects appear partially in the range
of the sensor. This makes a negative value for the
bonding box and makes the box appear behind the ac-
tual object (as in Figure 4) as a beam for 3D boxes and
significant box for 2D bounding box. Thus, it does
not fix the “ghost” box problem, when we correct the
negative boxes to zero boxes. The previous works for
filtering the bounding box (Section 2) did not fix this
issue where we operate a special filter for negative
notation. Therefore, we could generate a sample of
“ghost”-problem typical data in our GitHub link by
running the file (boundingBox.py).
4.2 Ghost Bounding Box
The bounding box which is generated by Carla sim-
ulator appears for all objects in the coordinate of the
view of the camera (FOV and vertical view), and it
does not take into account the occluded object by ob-
stacles such as a wall or buildings (Figure 4). The
previous works solved this problem, but it is not re-
solved accurately in some special cases (Section 2).
Whereas we solved this issue with high accuracy i.e.
if an object is present in the image by just one pixel,
we can detect it.
Figure 5: The negative notation effects on the bounding
boxes for the objects. For 3D bounding box, the box ap-
pears as a beam (left). For 2D bounding box (see the right
image), the box should have included the vehicle (in the
corner of the image at the right) inside, but instead, it is
covering a significant portion of the entire image.
5 METHODOLOGIES
5.1 Objects in Carla Simulator
Carla simulator includes four vehicle classes (car,
truck, van, and bus), as well as vulnerable road users
(motorcycles, bicycles, and pedestrians). We ex-
cluded motorcycles and bicycles from our work be-
cause their 2D bounding boxes appear as lines instead
of boxes. For static objects, we included traffic lights
in our work. Extending the work to include other
static objects is possible with our algorithm. The
classes we included in our work is (car, bus, truck,
van, walker, and traffic light).
5.2 Sensors in Carla Simulator
• RGB Image Sensor. This sensor is installed in the
ego vehicle in Carla simulator and the output as an
RGB (Red, Green, and Blue) image, the parame-
ters of this sensor in our work have the following
FOV=90, iso=100, gamma=2.2, and image size=
(x:1280, y:720).
• Semantic Segmentation Camera. We also in-
stalled Semantic segmentation Camera on the ego
vehicle in the simulation. In the context of a cam-
era, it refers to a computer vision technique used
in image analysis and computer vision systems. It
involves the process of classifying each pixel in
an image into a specific category or class, such as
identifying objects, regions, or areas in the image
and labelling them accordingly. This technique is
commonly used in various applications, including
autonomous vehicles, surveillance, image editing,
and medical imaging, among others. Applications
of semantic segmentation with cameras include
Autonomous Vehicles (Sistu et al., 2019) where
Semantic segmentation is crucial for self-driving
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
270
cars to identify and understand their surroundings,
including detecting pedestrians, other vehicles,
road signs, and road boundaries. In Carla sim-
ulator we used automatic labelling of the object
(Table 1) which plays a major role in our work,
and we take the same parameters as the RGB cam-
era sensor (ROV and Image Size) (Chresten et al.,
2018).
• Radar. The RADAR sensor in the CARLA sim-
ulator is a placeholder model that is not based on
raytracing. It casts rays to objects and computes
distance and velocity using a simplified model.
The sensor can detect obstacles in front of it
and can be used for applications such as adaptive
cruise control and obstacle detection. The output
of radar is altitude, azimuth, depth, velocity.
• LiDAR. The CARLA LiDAR sensor is a 3D point
cloud sensor that uses laser light to measure dis-
tance to objects in its surroundings.
• Depth Image. CARLA depth images are
grayscale images where each pixel represents the
distance to the object at that pixel. There are two
kinds of depth image: colour image and gray scale
image, which turned the distance sorted as an
RGB channels into a [0,1] float. In our generated
Data, we generated the Depth image as grayscale.
Note: The parameters in this sensors are editable
where we could control in the parameters in the
file (sensors.yaml) – see the package in our GitHub
project, where we generated RGB images, Semantic
segmentation images, radar data, lidar data, depth im-
ages, and filtered bounding box notations as an text
file.
5.3 Correct the Coordinates of the
Boxing Object
The 2D box notation is defined in two ways: the cen-
tre box and the corner box. The corner box is rep-
resented as (x min, y min, x max, y max), with the
reference point located at the upper-left corner of the
image. The numerical values within this notation cor-
respond to the coordinates of the pixels at that specific
point (Figure 6). In addition, the coordinates should
be normalized (Albumentations, 2023) according to
the following formula:
x
min
= x
up le f t
/width
y
min
= y
up le f t
/hight
x
max
= x
down right
/width
y
max
= y
down right
/hight
(3)
Where the width and hight describe the dimension of
image by pixels. The centre coordinates describe the
centre, width and hight of the box (x centre, y centre,
width, hight) (Figure 7). It’s important to note that
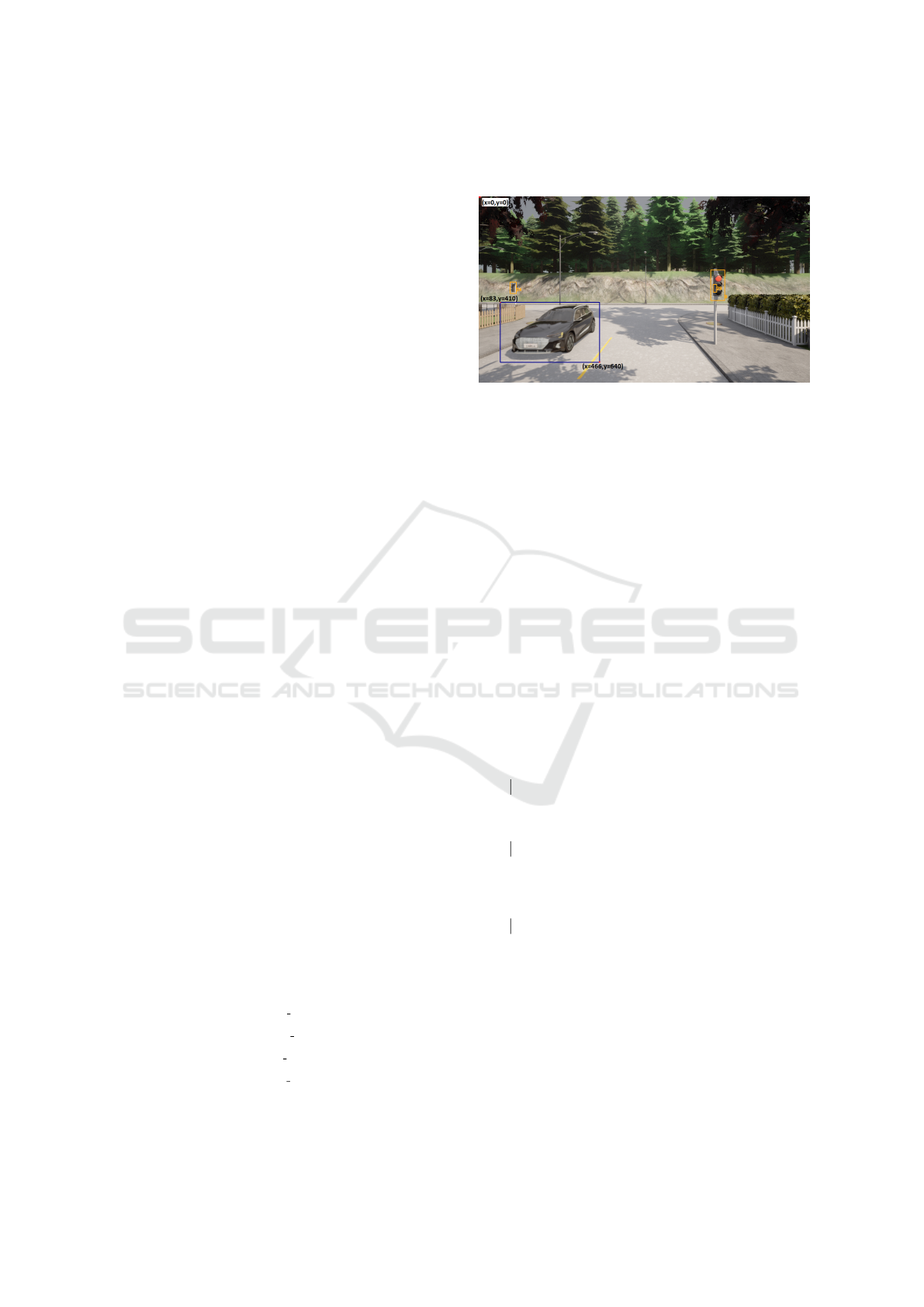
Figure 6: The coordinates of the box of an object are shown.
We defined the corner coordinates of the box on the car as
(x min, y min, x max, y max) = (83, 410, 466, 640) respec-
tively.
the minimum value for a coordinate is always zero.
However, the maximum value varies depending on
whether the coordinate has been normalized or not.
In the case of normalized coordinates, the maximum
value is set to one. On the other hand, when dealing
with non-normalized coordinates, the upper limit is
determined by the dimensions of the image pixel. It’s
worth mentioning that in the context of the coordinate
system used in the Carla simulator, it’s possible for a
generated corner coordinate to fall below zero or ex-
ceed the dimensions of the image pixel. To correct
this issue, we filtered the value of coordinates as fol-
lows:
Data: Normalized corner box (x centre, y centre,
width, hight)
Result: Correct the coordinate of the box
if x
min
> 1 then
delete the box and stop;
end
x
min
= max(0, x
min
);
if x
max
< 0 then
delete the box and stop;
end
x
max
= min(x
max
,1);
Repeat same steps for y
min
and y
max
;
if area of the box = 0 then
delete the box;
end
Algorithm 1: Correct the coordinate.
The correction of this issue of coordinates will re-
solve the incorrect bounding box value. However, it’s
important to note that this correction won’t address
the box covering a significant portion of the image
(Figure 4). We will delve into how we addressed this
challenge and how we did solve it later in this paper.
Improve Bounding Box in Carla Simulator
271

Figure 7: Centre coordinates for bonding box objects.
5.4 Filter Unwanted Boxes
As discussed earlier, another issue related to bound-
ing boxes in Carla simulator is the presence of ”ghost
boxes.” These are boxes that are occluded by other
objects (and not visible in the simulation) but they
are still labelled in Carla (Figure 1). To address this
challenge, we utilize semantic segmentation in the
Carla simulator to filter out unwanted boxes. In the
Carla simulator, there are 28 distinct colours asso-
ciated with various objects (as shown in Table 1).
Our approach involves systematically examining each
bounding box using semantic segmentation cameras.
We verify whether the colour within the box corre-
sponds to the expected object colour. For instance, if
the box represents a car, we check if there are pixels
with the colour (0,0,142) inside the box, aligning with
the designated area in the image segmentation cam-
era. To enhance the precision of the bounding box,
we implemented a filtering criterion to refine object
detection. Specifically, we retained bounding boxes
that occupied at least 10% of the total area. In other
words, if at least 10% of the bounding box of the car
area contained pixels with a value of (0, 0, 142) (Table
1), the box was preserved, otherwise, it was deleted
(Figure 8).
The threshold of 10% is a flexible value in
our work. We can change the boundingBox.yaml
file in the GitHub project by changing the thresh-
old small box to the appropriate present. This
allows us to adjust the size of the bounding boxes
that are detecting. For example, if we want to
detect smaller objects, we can lower the thresh-
old value. The threshold small box parameter is
located in the boundingBox.yaml file. We can
change the value of this parameter by editing
the file and saving it. The new value will be
used the next time we run the object detection code.
Figure 8: In this filter, we check each box in image segmen-
tation camera if it fulfils 10% of the colour corresponding
to the object in image segmentation. In our example the
colour of the car in image segmentation in Carla is (0, 0,
142), the small box behind the field is hidden and there is
no pixel with value (0, 0, 142) inside of it, as compared to
the bounding box for the car in the large box.
Here is an example of how to change the thresh-
old small box parameter:
threshold_small_box: 5
This will change the threshold value to 5%. This
means that only bounding boxes, that are at least 5%
of the area, which contains the colour corresponding
to this object on image segmentation, will be detected.
This procedure allows us to check whether the object
exists at each pixel of the bounding box, so we can
detect the object even if the box has only one pixel.
5.5 Filter the Large Boxes
The previous method (Section 5.4) suffers one limi-
tation in the case of large bounding boxes. This is
because a bounding box that identifies an object may
contain other objects, if the bounding box is large
enough to cover them. Therefore, if we use a 10%
match threshold, then the bounding box may be incor-
rectly retained, even if it does not accurately identify
the object (Figure 9).
To solve this challenge, we defined two thresholds
for the large boxes.
• The ratio of the bounding box area to the image
area.
• A special threshold for filtering large bounding
boxes.
In our work, we used a criterion of 70% to deter-
mine whether a bounding box is large. In other words,
if the ratio of the bounding box area to the image area
is greater than 70%, then we considered the box to
be large. Otherwise, the box was considered to be
normal or small. The special threshold that we used
in our GitHub project to filter the boxes is 50%. This
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
272
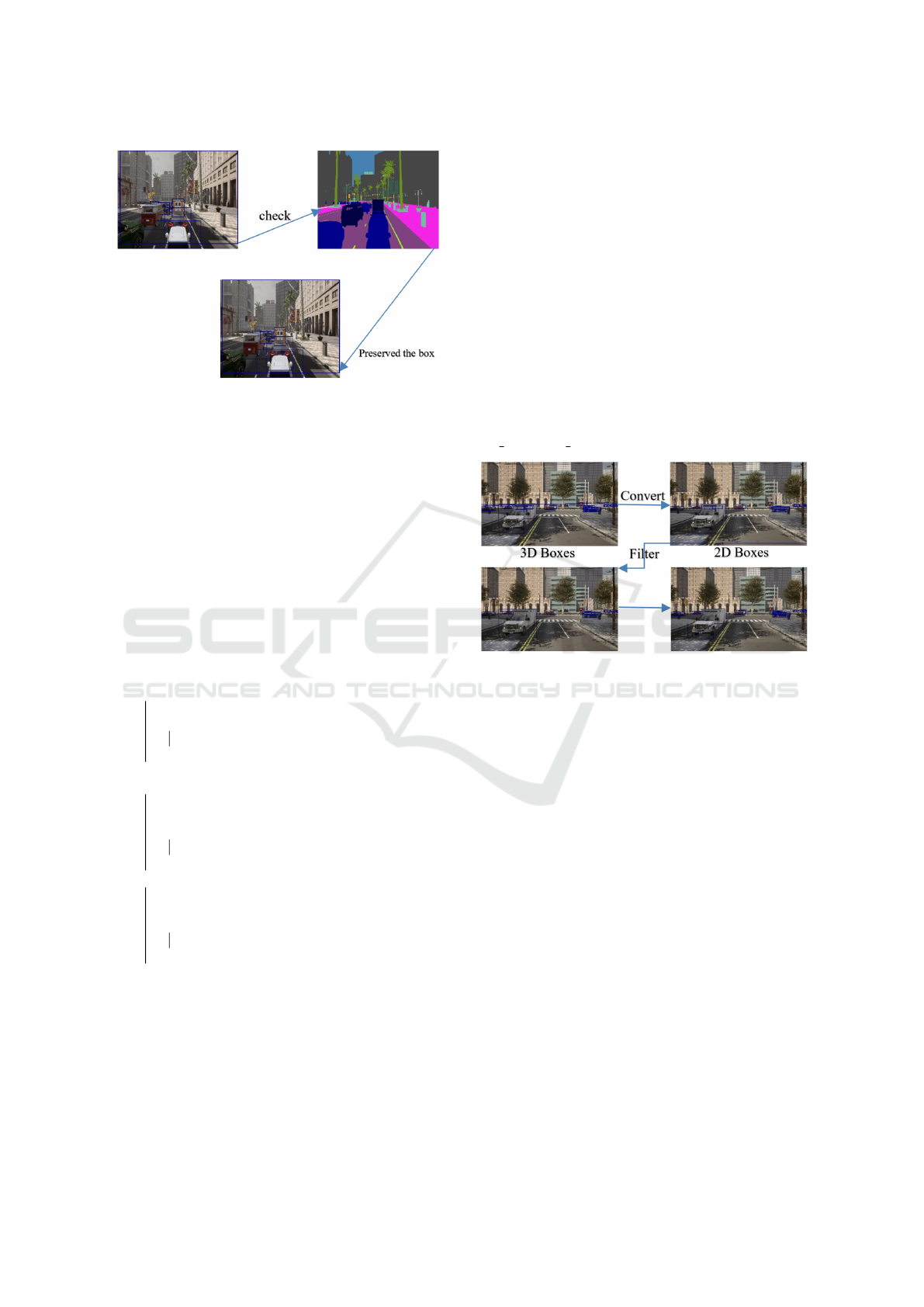
Figure 9: The large box that covers a significant portion of
the image and contains multiple cars that exceed the thresh-
old (10%) of the area of the box, is a ghost box for a car.
This leads to preserving the bounding box, even though it
does not accurately identify a car.
means that if a large bounding box contains more than
50% of pixels in the image segmentation that belong
to the same class as the detected object, then the box
is preserved. Otherwise, the box is deleted. This al-
gorithm describes the filtering of the box:
Data: Normalized corner box (x centre, y centre,
width, hight)
Result: Filter the ghost boxes.
initialization;
Count the pixels = 0;
for all the pixels in the box in image segmentation
do
if the pixel is the same class of the box
detected then
Count the pixels +=1;
end
end
if the box is large then
if the ratio of Count the pixels to the number
of pixels of the box is less than the large box
threshold filter then
delete the box;
end
else
if the ratio of Count the pixels to the number
of pixels of the box is less than the normal
box threshold filter then
delete the box;
end
end
Algorithm 2: Filter the boxes.
5.6 Filter 3D Bounding Box
In our work, we propose a novel filtering approach
for 3D bounding boxes by converting the boxes to
2D bounding boxes and applying a filtering criterion
to the 2D representations. This approach enables ef-
ficient and effective filtering of 3D bounding boxes
(Figure 10). Filtering 3D bounding boxes by identify-
ing ghost boxes, which are bounding boxes that do not
correspond to real objects. This is a crucial step in ob-
ject detection and tracking tasks. In our work, we pro-
pose a novel filtering method that leverages the con-
cept of 2D bounding boxes to efficiently identify and
remove ghost boxes from 3D bounding box sets. By
converting 3D bounding boxes to their correspond-
ing 2D representations, we can effectively check for
ghost boxes based on 2D geometric criteria. This
approach significantly improves the accuracy and ef-
ficiency of object detection and tracking tasks, par-
ticularly in scenes with complex backgrounds or oc-
clusions. In the GitHub we implemented an exam-
ple to filter the 3D bounding box in the file name
3D Bounding Box.py.
Figure 10: Filtering the 3D bounding box by check if the
box is ghost box or not in 2D bounding box.
6 OUR DATA VALIDATION
To create a diverse and comprehensive dataset for ob-
ject detection and localization, we employed the Carla
simulator 9.14 (Dosovitskiy et al., 2017) and utilized
eight distinct maps (5000 images for each map). Our
filtering approach yielded a dataset encompassing six
object classes: car, bus, truck, van, walker, and traf-
fic light (see section 5.4). To enhance the dataset’s
variety, we incorporated data from five sensors: RGB
camera, semantic segmentation camera, depth cam-
era, radar sensor, and LIDAR sensor. For all objects
within a range of 50 meters, 100 meters, 150 meters,
and 200 meters (Figure 11), we applied our bounding
box filter to the RGB images (1280,720). To stan-
dardize our results, we trained our dataset using a
pretrained YOLOv8 model (Jocher et al., 2023) for
bounding boxes with all objects up to 100 meters. The
training parameters included SGD (lr=0.01, momen-
tum=0.9), image size for training 640, epoch 50, and
iou 0.7 Using 20% of images for validation (i.e. 1000
Improve Bounding Box in Carla Simulator
273

images for each map) we got a result for data labelled
up to 100 meter as the in Table 2, and results for the
same data labelled up to 50 m (Table 3).
Figure 11: Labelling of bounding boxes up to 50m (left)
and up to 100 m (right).
Table 2: A summary of results from the model which is
trained using our filtered data in base of bounding box,
which is labeling all objects up to 100 meters, where the
image size for training has 640x640 pixels.
Class Precision Recall mAP50
All 0.915 0.664 0.75
Car 0.895 0.788 0.859
Bus 0.925 0.949 0.961
Truck 0.909 0.433 0.536
Van 0.874 0.795 0.865
Walker 0.914 0.485 0.585
Traffic light 0.972 0.535 0.696
Table 3: A summary of results from the model which is
trained using our filtered data in base of bounding box,
which is labeling all objects up to 50 meters, where the im-
age size for training has 640x640 pixels.
Class Precision Recall mAP50
All 0.947 0.805 0.882
Car 0.941 0.908 0.964
Bus 0.917 0.981 0.983
Truck 0.965 0.524 0.639
Van 0.927 0.918 0.965
Walker 0.954 0.757 0.865
Traffic light 0.977 0.739 0.876
Table 4: A summary of results from the model which is
trained using our filtered data in base of bounding box,
which is labeling all objects up to 100 meters, where the
image size for training has 1280x1280 pixels.
Class Precision Recall mAP50
All 0.939 0.787 0.876
Car 0.927 0.852 0.919
Bus 0.918 0.953 0.977
Truck 0.969 0.615 0.787
Van 0.906 0.866 0.924
Walker 0.944 0.687 0.8
Traffic light 0.971 0.75 0.851
Table 5: A summary of results from the model which is
trained using our filtered data in base of bounding box,
which is labeling all objects up to 50 meters, where the im-
age size for training has 1280x1280 pixels.
Class Precision Recall mAP50
All 0.955 0.908 0.966
Car 0.962 0.932 0.979
Bus 0.916 0.982 0.989
Truck 0.948 0.734 0.909
Van 0.949 0.967 0.987
Walker 0.975 0.895 0.961
Traffic light 0.98 0.935 0.97
Form the previous two tables, we can conclude
that the accuracy of object detection decreases as the
distance between the object and the camera increases.
This is because smaller objects are more difficult to
detect due to their lower resolution. This effect is par-
ticularly pronounced when annotating objects for dis-
tant scenes. To improve the accuracy of object detec-
tion for distant objects, it is important to use high-
resolution images and to train the object detection
model on a dataset that includes a large number of
distant objects.
As evident in Table 4 and Table 5, training our
data using an image size of 1280 resulted in enhanced
object detection accuracy, particularly for objects lo-
cated at greater distances. This improvement can
be attributed to the increased resolution of the im-
ages, which allows the object detection model to cap-
ture finer details and distinguish objects more effec-
tively, especially when dealing with smaller objects
at a distance. Interestingly, we observed that traffic
lights, despite being small objects, achieved high de-
tection accuracy. This can be attributed to the dis-
tinctive shape of traffic lights, which resembles traffic
light poles (Figure 12). The object detection model
is likely to learn these distinctive features, enabling it
to accurately identify traffic lights even when they are
small or hight distant.
Figure 12: Sample of our data where we see that the traffic
light has figures such as a traffic light poles.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
274

7 CONCLUSIONS
The Carla simulator is an effective tool for generat-
ing datasets for object detection tasks. Its flexibility
and controllability over the environment and artificial
scenarios, such as accidents, congestion, and severe
weather conditions, make it a valuable tool for creat-
ing realistic and challenging datasets. Our proposed
filter has been shown to be highly effective in improv-
ing the accuracy of object detection models trained
by Carla datasets generated using our filter. We be-
lieve that our work represents a significant step for-
ward in the development of high-quality datasets for
object detection tasks. In addition, data generation
through the CARLA simulator has become more re-
liable. The project we developed to create bounding
boxes is now fully available on GitHub. In addition,
we have made it more flexible to select parameters
in CARLA through YAML files. This allows for the
generation of data related to weather conditions, such
as fog, rain, and the number of cars, as well as the
ability to control car lights. This flexibility makes
it easy to develop self-driving cars in severe weather
conditions in CARLA. In addition, we have included
many sensors, such as radar, lidar, and depth image,
which allow for the integration and synchronization
of multiple sensors and the use of the bounding boxes
that we developed. Using YOLOv5 and YOLOv8, we
achieved good results and high accuracy in the data
that was collected using our algorithm to filter bound-
ing boxes. The accuracy exceeded 90%. This con-
firms the success of the filter we developed in gener-
ating data through the CARLA simulation program.
REFERENCES
Albumentations (2023). Bounding boxes. Boundingboxe
saugmentationforobjectdetection. [Online; accessed
28-December-2023].
Burdorf, S., Plum, K., and Hasenklever, D. (2022). Re-
ducing the amount of real world data for object de-
tector training with synthetic data. arXiv preprint
arXiv:2202.00632.
Chaar, M. M., Weidl, G., and Raiyn, J. (2023). Analyse
the effect of fog on the perception. In 10th Inter-
national Symposium on Transportation Data & Mod-
elling (ISTDM2023), page 332.
Chresten, L., Lund-Hansen, Juul, T., Eskildsen, T. D.,
Hawes, I., Sorrell, B., Melvad, C., and Hancke, K.
(2018). A low-cost remotely operated vehicle (rov)
with an optical positioning system for under-ice mea-
surements and sampling. Cold Regions Science and
Technology, 151:148–155.
Correll, N., Hayes, B., Heckman, C., and Roncone, A.
(2022). Introduction to autonomous robots: mecha-
nisms, sensors, actuators, and algorithms. Mit Press.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). Carla: An open urban driving sim-
ulator. In Conference on robot learning, pages 1–16.
PMLR.
Jocher, G., Stoken, A., Borovec, J., Changyu, L., Hogan, A.,
Diaconu, L., Poznanski, J., Yu, L., Rai, P., Ferriday,
R., et al. (2023). Yolov8 docs. https://docs.ultra
lytics.com/#where- to- start. [Online; accessed 28-
December-2023].
Mukhlas, A. (2020). Carla 2d bounding box annotation
module. https://mukhlasadib.github.io/CARLA- 2
DBBox. [Online; accessed 28-December-2023].
Muller, R. (2022). Drivetruth: Automated autonomous driv-
ing dataset generation for security applications. In
Workshop on Automotive and Autonomous Vehicle Se-
curity (AutoSec).
Niranjan, D., VinayKarthik, B., et al. (2021). Deep learning
based object detection model for autonomous driving
research using carla simulator. In 2021 2nd interna-
tional conference on smart electronics and communi-
cation (ICOSEC), pages 1251–1258. IEEE.
Pitropov, M., Garcia, D. E., Rebello, J., Smart, M., Wang,
C., Czarnecki, K., and Waslander, S. (2021). Canadian
adverse driving conditions dataset. The International
Journal of Robotics Research, 40(4-5):681–690.
Rong, G., Shin, B. H., Tabatabaee, H., Lu, Q., Lemke, S.,
Mo
ˇ
zeiko, M., Boise, E., Uhm, G., Gerow, M., Mehta,
S., et al. (2020). Lgsvl simulator: A high fidelity sim-
ulator for autonomous driving. In 2020 IEEE 23rd
International conference on intelligent transportation
systems (ITSC), pages 1–6. IEEE.
Sistu, G., Chennupati, S., and Yogamani, S. (2019). Multi-
stream cnn based video semantic segmentation for au-
tomated driving. arXiv preprint arXiv:1901.02511.
Team (2020). Bounding boxes. https://carla.readthedocs.io
/en/latest/tuto G bounding boxes/. [Online; accessed
28-December-2023].
Improve Bounding Box in Carla Simulator
275
