
Scoping: Towards Streamlined Entity Collections for Multi-Sourced
Entity Resolution with Self-Supervised Agents
Leonard Traeger
1,2
, Andreas Behrend
2
and George Karabatis
1 a
1
Department of Information Systems, University of Maryland, Baltimore County, U.S.A.
2
Institute of Computer and Communication Technology (ICCT), Technical University of Cologne, Germany
Keywords:
Data Cleaning and Integration, Entity Resolution, Entity Linkage, Data Quality, Deep Learning.
Abstract:
Linking multiple entities to a real-world object is a time-consuming and error-prone task. Entity Resolution
(ER) includes techniques for vectorizing entities (signature), grouping similar entities into partitions (block-
ing), and matching entity pairs based on specified similarity thresholds (filtering). This paper introduces
scoping as a new and integral phase in multi-sourced ER with potentially increased heterogeneity and more
unlinkable entities. Scoping reduces the space of candidate entity pairs by ranking, detecting, and removing
unlinkable entities through outlier algorithms and reusable self-supervised autoencoders, leaving intact the
set of true linkages. Evaluations on multi-sourced schemas show that autoencoders perform best in schemas
relevant to each other, where they reduce entity collections to 77% and still contain all linkages.
1 INTRODUCTION
Entity Linkage (EL) is a core discipline in Entity
Resolution (ER) and data management especially
when dealing with integration tasks. The overall
goal is to clarify a global entity profile such as a
customer’s address connected to all underlying data
sources. It is evident that linking entities between
more than two data sources results in a signifi-
cantly higher degree of heterogeneity and variance
in data quality. Rahm et al. define this issue as
“multi-sourced” ER in which arbitrary numbers of
sources and respective entity profiles refer to the
same real-world object (Lerm et al., 2021). An entity
profile e
i
may be an attribute of a relational database
schema “product id” or API service “product code”
representing the real-world entity r “product iden-
tifier”. The set of all entity profiles within one data
source denotes as an entity collection E
i
, e.g., E
1
=
“Order Customer-Oracle”. Traditional EL solutions
pass the raw entity collections of all entity profiles
from one module to another, resulting in linkages
that may not always reflect reality. In addition,
there is a lot of computational power to be used for
such inaccurate linkages (Papadakis et al., 2022). In
order to solve this problem, we introduce scoping, a
new phase in the EL pipeline that ranks entities and
a
https://orcid.org/0000-0002-2208-0801
generates a subset E
′
of the raw entity collections E
while leaving intact the major set of true linkages.
Motivating Example: Figure 1 depicts an excerpt
of a multi-sourced Entity Linkage problem between
three entity collections sampled from three schemas
of database vendors Oracle (E
1
), MySQL (E
2
), and
SAP HANA (E
3
), storing data about customers and
products. Each entity collection contains different en-
tity profiles representing relational attributes e
i
. The
brute-force approach of comparing each entity from
one collection with all entities from the other collec-
tions results in 180 comparisons. We need a solu-
tion to this problem that reduces the number of com-
parisons by identifying a subset of the entity collec-
tions containing fewer unlinkable entities while keep-
ing those with true linkages. Therefore, we introduce
scoping, a new technique that reduces the space of po-
tential linkages in multi-sourced ER. Scoping is per-
formed between the signature and blocking phases of
the EL pipeline, and it consists of ranking, sorting,
and filtering the data quality of entity signatures. It is
an integral phase of multi-sourced Entity Resolution
that can yield streamlined entity collections. Follow-
ing the Big Data Vs, we assume that the number of
entity collections rises in “Volume” and comes along
with “Veracity”. Therefore, the more entity collec-
tions need to be linked between them, the more enti-
ties without corresponding linkage will also remain at
Traeger, L., Behrend, A. and Karabatis, G.
Scoping: Towards Streamlined Entity Collections for Multi-Sourced Entity Resolution with Self-Supervised Agents.
DOI: 10.5220/0012607500003690
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 26th International Conference on Enterprise Information Systems (ICEIS 2024) - Volume 1, pages 107-115
ISBN: 978-989-758-692-7; ISSN: 2184-4992
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
107
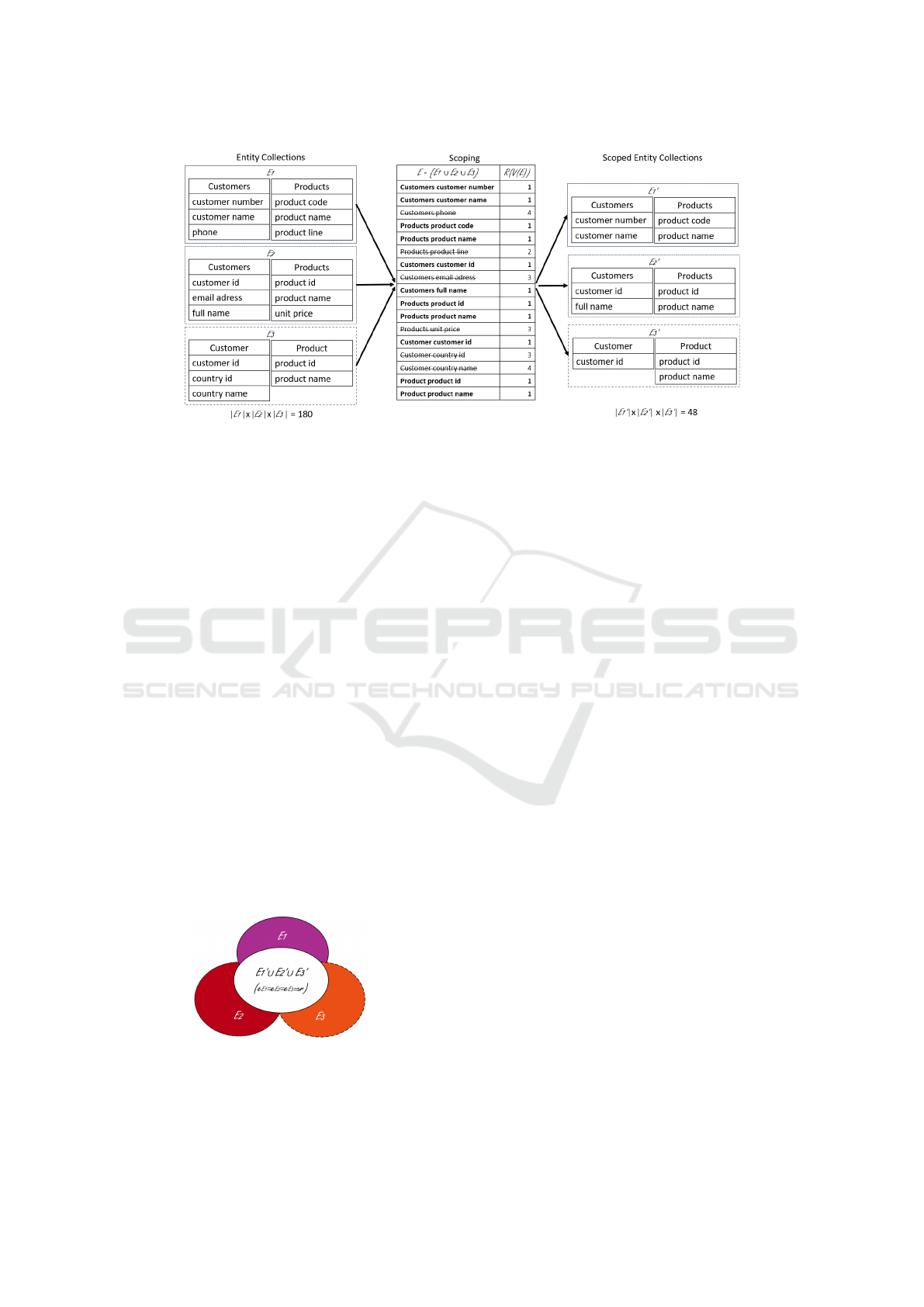
Figure 1: Scoping of multi-sourced Entity Collections (Example).
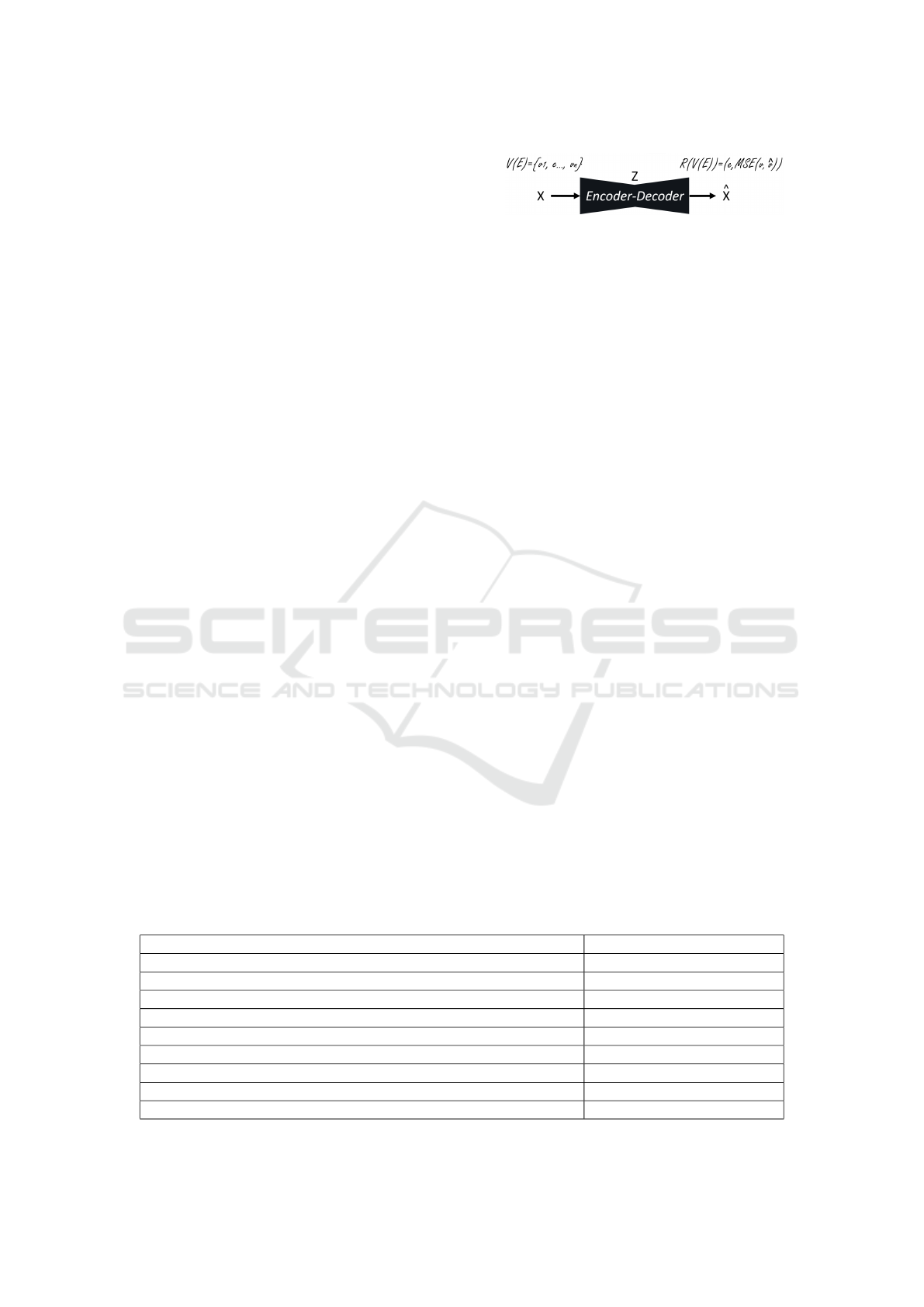
the end of the EL process. For example, as the entity
collections become larger due to the rise in Volume,
we observe an increase in heterogeneity and a de-
crease in Veracity. Figure 2 illustrates the increasing
heterogeneity represented by the colored entity col-
lections represented as ovals with unlinkable entities,
while the linked ones are shown in the white overlap-
ping oval. Scoping seeks entities with linkages repre-
sented in the overlapping oval. The contributions of
this paper are:
• We introduce scoping, a novel and integral phase
of Entity Linkage, positioned right after the sig-
nature and before the blocking phase (Figure 3),
improving the quality of the search space of pair
candidates (Section 3).
• We create entity ranking methods for scoping by
relating them to anomaly detection and adapt Z-
score, LOF, PCA, autoencoders, and ensembles as
entity ranking methods (Section 3.2).
• We evaluate our scoping approach based on ad-
ditional performance metrics on a new real-world
dataset ”OC3-HR” for multi-sourced Entity Link-
age (Section 4).
Figure 2: Visualisation of Scoping of multi-sourced Entity
Collections based on Figure 1.
2 RELATED WORK
Traditional ER workflows consist of three sequential
phases. In the signature phase, a numerical embed-
ding strategy applies to all entity profiles. The vec-
torization of an entity profile, such as an attribute
in a relational database named “customer address”
can be based on tf-idf (Paulsen et al., 2023), the ag-
gregation of pre-trained Word2Vec embeddings such
as Glove or FastText (Cappuzzo et al., 2020). Fur-
ther techniques combine words via sequence model-
ing, transformers, and self-supervised models (Brun-
ner and Stockinger, 2020), (Thirumuruganathan et al.,
2021), (Azzalini et al., 2021), (Zeakis et al., 2023).
The blocking phase generates a set of likely match-
ing entity profiles into buckets. This phase rarely
incorporates any further knowledge infusion except
query tokens that vary with hyperparameter settings
such as the size of the buckets and parallelization
settings on hardware. Respective algorithms use di-
mensionality reduction techniques (PCA, t-SNE) to
reduce the signature length. Then, nearest-neighbor
algorithms (ENNs such as Hierarchical Clustering,
K-Means, DBSCAN) (Azzalini et al., 2021) or ap-
proximate nearest-neighbor algorithms using hash in-
dexing methods (ANNs such as LSH with FAISS
or SCANN implementation) are applied to generate
buckets of similar entities (Zeakis et al., 2023), (John-
son et al., 2019), (Guo et al., 2020).
Finally, the filtering phase constructs a set of ver-
ified linkages of matching entity profiles. This phase
examines every inter-bucket pair and filters out un-
wanted linkages whose similarity is below a similarity
threshold while keeping those that exceed the thresh-
old. Filtering is optional and applies to the Carte-
sian set between entities within a blocking-generated
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
108

Figure 3: Entity Linkage Workflow with Scoping.
bucket (Koutras et al., 2021), (Traeger et al., 2022).
3 SCOPING
Scoping combines a ranking algorithm with a tun-
able threshold for generating streamlined entity col-
lections. We assume a schema-aware, multi-sourced
and unsupervised entity linkage environment. First,
we provide an overview of the notations of this sec-
tion in Table 1.
3.1 Scoping Definition
In entity linkage, we aim to find the set of linked entity
profiles in which entities share the same real-world
entity representation L(E) = {(e
a
,e
b
) : e
a
∈ E
i
and
e
b
∈ E
j
so that e
a
≡ e
b
⇒ r} where E
i
,E
j
∈ E be-
tween entity collections.
Scoping utilizes the entity signatures v
i
, the pre-
viously vectorized entity profiles processed by the
Entity Signature phase V (E). Before applying the
actual scoping method, an Entity Ranking algorithm
R (V (E)) computes an entity score for each entity
signature, returning the tuple (e
i
,s
i
) where s
i
is the
score of entity profile e
i
. The ranking algorithms pre-
sented in Section 3.2 categorize entity profiles with
lower scores as linkable and higher scores as unlink-
able in comparison to each other. The actual scoping
algorithm S, first, sorts the entity score tuples (e
i
,s
i
)
in descending order so that s
i
<s
i+1
. Secondly, the al-
gorithm filters the entity score tuples to identify and
prioritize top-ranked entities with lower scores. We
provide a single configurable threshold p ∈ [0,1] for
the scoping algorithm that represents a radius (white
overlapping space in Figure 2) for selecting linkable
entities depending on the scores. The output of scop-
ing generates a new subset E
′
⊆ E with fewer entity
profiles selected from the original entity collection.
Subsequently, blocking the entity profiles across E
′
instead of E results in higher quality entity pair candi-
dates, resulting in less computational resources (space
and time). Scoping generally differs in comparison to
blocking in the sense that it aims to generate a sub-
set entity collection E
′
∈ E without compromising
the set of linkages L(E
′
) ≡ L(E) regardless of the
blocking sequence.
Figure 1 shows the effect of scoping on the orig-
inal collection, in which a ranking algorithm com-
putes a score for each entity and scopes 11 out of the
17 top-scored entities (p = 0.65). Unlinkable entities
like “phone” and “country id” are omitted. With the
scoped collections, we go down from 180 to 48 po-
tential linkages without missing a single true linkage.
3.2 Ranking Methods in Scoping
In Section 3.1, we describe that the ranking methods
R (V (E)) process the entity signatures to compute an
entity score tuple (e
i
,s
i
) used to scope a relative por-
tion of E based on p in order to generate a subset of
entity collections E
′
. It is worth noting that the size
of the data input in scoping is linear in the number of
entity profiles |E
1
| + |E
...
| + |E
n
| and not the Carte-
sian product (brute force) between all possible entity
pairs between entity collections |E
1
| × |E
...
| × |E
n
|.
Now, we present two modified outlier algorithms that
compute anomaly scores v
i
for each entity signature.
Then, we introduce our novel encoder-decoder-based
anomaly detection algorithms. We provide a compu-
tational complexity analysis for each of these algo-
rithms that we evaluate in Section 4.
Z-Score: It is a statistical measure to quantify the
entity’s degree of dispersion. Its anomaly score
implies how many standard deviations σ an entity
signature differs from the mean µ of all entity signa-
tures (e
i
,s
i
) = ||
(v
i
−µ)
σ
||. The Z-Score is computed
per dimension of the entity signature and results in
positive and negative floating values. Subsequently,
the mean of the absolute (positive) dimension-based
Z-scores along with the entity signature represents
the entity score. The time complexity for computing
the Z-scores is O(|E| · ¯v).
Local Outlier Factor (LOF): It is a density-based
method that quantifies the local deviation of a data
point from its neighborhood. The locality of the
anomaly score depends on the degree of isolation
(e.g., Euclidean or Cosine) between the entity
signature and the surrounding entity signatures
given by k-nearest neighbors. By comparing the
local distances of one entity’s signature to the local
densities of its surroundings, those with substantially
lower densities are considered to be outliers. We
highlight that LOF requires k as a hyperparameter
Scoping: Towards Streamlined Entity Collections for Multi-Sourced Entity Resolution with Self-Supervised Agents
109
input representing the number of neighborhoods.
The value of k directs the number of global linkages
between entities and, therefore, highly influences
the local density scores. The time complexity for
computing the LOF is O(|E| · ¯v · k). We refer to the
original paper (Breunig et al., 2000) for more details.
Encoder-Decoder: Next, we propose a novel method
based on self-supervised encoder-decoder models to
implement scoping. A main challenge in anomaly de-
tection is the high dimensional space that occurs in the
vectorized entities (signatures). In the past, anomaly
detection with neural networks has received a lot of
attention (Gong et al., 2019), (Bank et al., 2021),
(Ruff et al., 2021), (Ilyas and Rekatsinas, 2022). The
effect of learning a generative model and using it to
detect anomalies has not yet been utilized within the
Entity Linkage research space, and therefore, it moti-
vates this work.
Once an encoder-decoder model is trained, fre-
quent entities that are similar and appear to exhibit
linkages pass the autoencoder with a lower recon-
struction error. The reason for this is a bottleneck
that appears in encoder-decoder algorithms, forcing
the model to focus on recurring entities during the
training rather than on rare anomalous ones. We adopt
this criterion for identifying entities with a high re-
construction error as entities out of the linkage bound.
To leverage an entity score of these methods for the
scoping framework, a wrapped-up agent computes the
mean squared error between the original and decoded
entity signatures. We illustrate the functionality in
Figure 4 and translate this model to an EL agent, as
it provides feedback on the adaptability of entities for
the linkage task based on a low or high reconstruc-
tion error. Additionally, the model of agents can be
reused to rank entities of newly adapted collections.
The benefit of using a trained model is that a holis-
tic recomputation, such as needed for the Z-Score or
LOF method, might not always be necessary. This ap-
proach can improve efficiency and save resources via
Figure 4: Agent for Entity Ranking in Scoping.
task transferability in EL pipelines.
Principal Component Analysis (PCA): Applying PCA
onto the entity signatures transforms them into a
lower-dimensional space. The reduced space should
also capture relevant patterns. Each principal com-
ponent in PCA quantifies the importance of the dis-
parity of entities along its dimension based on lin-
ear hyperplanes. This is useful, as the signatures
of unlinkable entities may exhibit unique patterns in
high-dimensional space. PCA can be reused for scop-
ing new entity collections by applying the model and
comparing the mean squared error. We now present
the PCA algorithm for scoping:
Data: V (E) = (v
i
) Entity Signatures
Result: R (V (E)) = (e
i
,s
i
) Entity Scores
X = scaler(0,1).fit((v
i
));
µ = mean(X);
//along dimensions;
pca = sklearn.PCA(nc).fit(X);
//singular value decomposition;
Z = pca.transform(X);
ˆ
X = (Z· pca.components) + µ;
return (s
i
) ⇐ MSE(X ,
ˆ
X);
Algorithm 1: Entity Ranking R with PCA.
The first line casts an optional [0..1] normalization
along the entity signature dimensions, transforming
the set of entity signatures (v
i
) to the input data set
X. As entity signatures contain both negative and
positive values along the dimensions, normaliza-
tion simplifies the subsequent mean and similarity
calculations. X is a |E| × ¯v matrix in which |E|
represents the number of entities of a collection and
¯v represents the dimensional length of the entity
Table 1: Notation Table.
Notation Meaning
e
i
Entity Profile
E
source
= (e
1
,e
...
,e
n
) Entity Collection
(e
E
1
≡ e
E
...
(≡ e
E
n
) ⇒ r) Real-world Entity
E = E
1
∪ E
...
∪ E
n
Unified Entity Collection
V (E) = (v
i
) Entity Signature
R (V (E)) = (e
i
,s
i
) Entity Ranking (score-tuple)
S((e
i
,s
i
), p) = {(e
i
,s
i
) : ∀s
i
<s
i+1
∧ |(e
i
,s
i
)| × p} = E
′
Entity Scoping (threshold)
B(E) = {(e
a
,e
b
) : e
a
∈ E
i
∧ e
b
∈ E
j
} where E
i
,E
j
∈ E Entity Blocking (brute-force)
L(E) = {(e
a
,e
b
) : e
a
∈ E
i
∧ e
b
∈ E
j
,e
a
≡ e
b
⇒ r} where E
i
,E
j
∈ E Entity Linkage
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
110

signature. In the second step, we compute the µ
vector of the mean along each dimension. Thirdly,
we initialize PCA with the number of components
given by the hyperparameter nc, subtract µ from
each (normalized) vector signature X , and compute
the singular value decomposition for each principal
component with the same vector length as ¯v. Sub-
sequently, we can now project the input data set X
onto the lower-dimensional principal components,
resulting in the encoded |E| × nc matrix we define as
Z. Finally, we cast the decoder operation to generate
ˆ
X. This involves reversing the dot-product between
Z and principal components plus the entity-wise
addition of the mean µ. Lastly, we compute the
mean-squared error (MSE) between X and
ˆ
X and
utilize these as the entity scores (s
i
). The time com-
plexity for PCA is O(|E| · ¯v
2
+ ¯v
3
). We refer to the
tutorial paper (Shlens, 2014) for more details on PCA.
Autoencoders: They are a special type of neural
networks trained to encode data on a meaningful rep-
resentation and reversely decode it back to its original
state. These models are considered self-supervised
as the data serves both as training input and output.
Similar to PCA, we follow the assumption that a
trained autoencoder learns relevant patterns more
efficiently of normally distributed entity signatures
but not for anomalous and unlinkable ones. More-
over, autoencoders with one latent layer and linear
activation functions generalize PCA. In the following
section, we provide a summary of autoencoders in the
context of anomaly detection using the reconstruction
error for scoping. More details on autoencoders can
be found in the survey by (Bank et al., 2021).
We formally denote the encoder function as
A(V (E) = X ) ⇒ Z mapping the set of the normal-
ized entity signatures into a latent lower-dimensional
representation. The decoder function B(Z) ⇒
ˆ
X aims
to transform the latent representation into the original
input. Both the functions of A and B are trained over
a number of epochs ep in order to minimize the mean
reconstruction error converging to
arg min
A,B
[MSE(X,B(A(X )))]
ep
.
Contrary to PCA, normalization of the entity sig-
natures not only simplifies the computation but allows
the use of non-linear activation functions. Both the
encoder and decoder functions can, therefore, con-
struct more elegant and superior non-linear hyper-
planes. At the same time, non-linear hyperplanes
tend to overfit. For this reason, different types of
regularization beyond the lower-dimensional bottle-
neck must be considered depending on the number
of entities |E|, signature length ¯v, and degree of de-
viations. Various possible configurations of the au-
toencoder may consider the network’s depth or shal-
lowness, the number of epochs, layers, neurons, acti-
vation functions, optimization algorithms, loss, and
validation sampling configurations. The computa-
tional time complexity depends on those architectural
choices; therefore, providing a O() notation varies
and is dependent on each different configuration. Due
to the rising time complexity of backpropagating the
weights of each neuron in each hidden layer over
multiple epochs, we assume autoencoders to have a
higher time complexity compared to the previously
presented ranking methods. In the scoping context,
we generally recommend preventing overfitting with
regularization, as such a model would generate iden-
tical entity scores that are not useful for scoping.
4 EVALUATION
We evaluate the scoping approach on a real-world
multi-sourced entity linkage dataset. We first
present the performance metrics we use, then we
describe the dataset, elaborate on chosen signa-
ture strategies, and the configuration of the rank-
ing methods. All experiments were performed
in Python Jupyter hosted by Google Collabora-
tory
1
. The dataset and code are available at
https://github.com/leotraeg/scoping.
Performance Metrics: To measure the effectiveness
of the algorithms for generating scoped entity collec-
tions E
′
from the original ones E, we adopt typical
metrics used in ER.
• Reduction Ratio (RR(E
′
,E)) reflects the time effi-
ciency in scoping without relevance to the ground
truth of linkages. It expresses the reduction in the
number of entity comparisons between the scoped
entity collections and the original ones:
1 − ||B(E
′
1
,E
′
...
,E
′
n
)||/||B(E
1
,E
...
,E
n
)||.
• Pair Completeness (PC(E
′
,E)) estimates the
number of potentially true entity linkages within
the scoped entity collections with respect to the
number of the ground truth entity linkages within
the original entity collections:
||L(E
′
1
,E
′
...
,E
′
n
)||/||L(E
1
,E
...
,E
n
)||.
• Harmonic-Mean RR-PC (HM(E
′
,E))) represents
a combined metric between the two competing
objectives of reduction ratio and pair complete-
ness.
2·RR·PC
RR+PC
.
The threshold p affects the collections of scoped
entities E
′
in a major way. Knowing its value before-
1
https://colab.research.google.com
Scoping: Towards Streamlined Entity Collections for Multi-Sourced Entity Resolution with Self-Supervised Agents
111
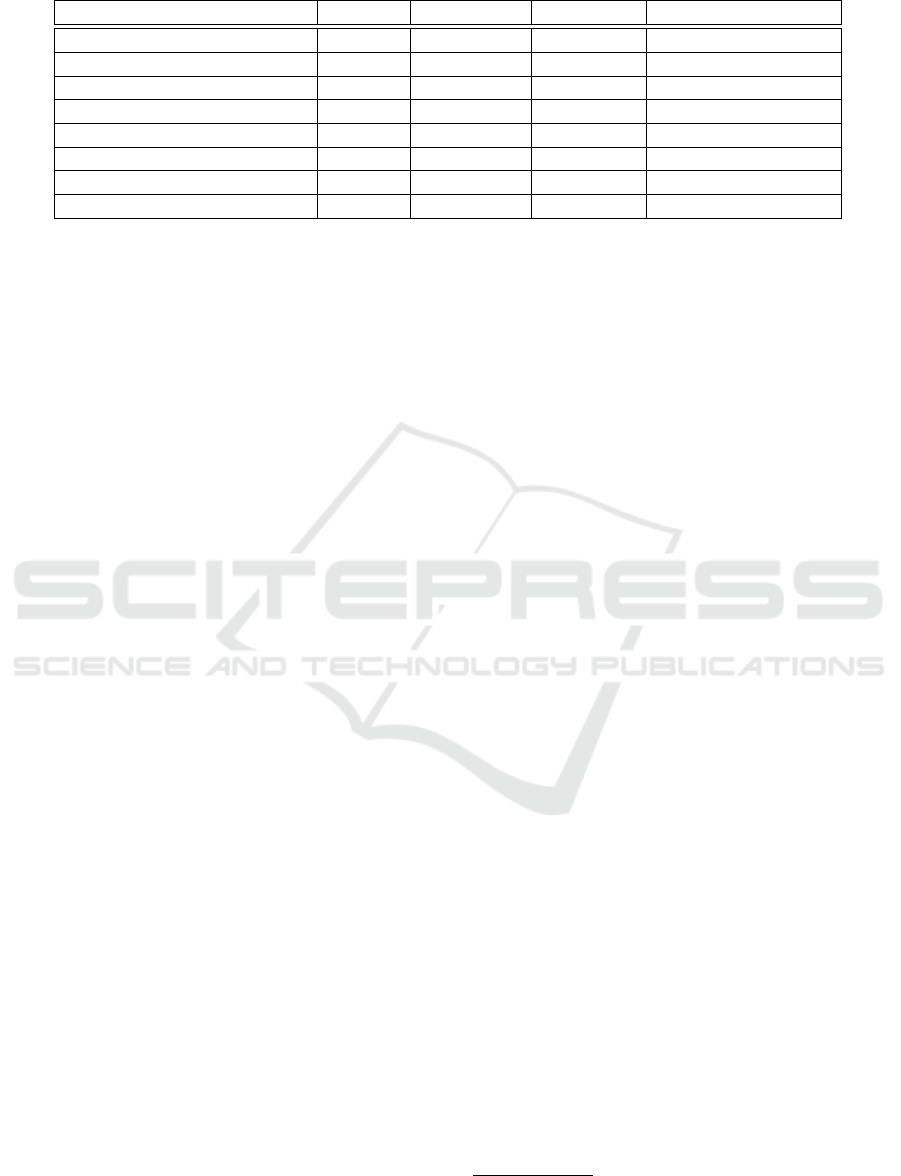
Table 2: Description of OC3-HR: a multi-sourced entity linkage dataset with relational database schemas.
Entity Collections (E
A
− E
B
) #Tables #Attributes |E
A
| × |E
B
| #Attribute Linkages
Domain-specific
∑
OC3 18 142 6617 47
OC-Oracle – OC-MySQL 15(7+8) 102(43+59) 2537 19
OC-Oracle – OC-HANA 10(7+3) 83 (43+40) 1720 16
OC-MySQL – OC-HANA 11(8+3) 99 (59+40) 2360 12
Domain-agnostic
∑
OC3-HR 25 177 11587 62
HR-Oracle – OC-Oracle 14 (7+7) 78 (35+43) 1505 0
HR-Oracle – OC-MySQL 15 (7+8) 94 (35+59) 2065 14
HR-Oracle – OC-HANA 10 (7+3) 75 (35+40) 1400 1
hand implies knowing the ground truth of entity link-
ages. As this is not true in reality, we propose to adjust
p as an engineering task aiming to yield better perfor-
mance by introducing two new metrics using the Area
Under Curve and comparing them.
• Area Under Curve PC APC(E
′
,E) evaluates the
entity scoring utility in scoping. The more entity
pairs that are correctly found with increasing p,
the higher the single-valued APC metric. A higher
APC for one ranking method allows more con-
fidence in lowering the p threshold without time
considerations.
• Area Under Curve HM AHM(E
′
,E) helps to
quantify the trade-off between the reduction ratio
and pair completeness across all p thresholds. A
higher AHM recommends a more robust scoping
approach considering both the pair completeness
and time efficiency.
Schemas and Experiments: The datasets that we
use contain only schema information from Oracle,
MySQL, and SAP HANA, without instance data.
First, we perform a set of experiments on a domain-
specific set of order-customer (OC) schemas with
47 true inter-schema attribute linkages out of 6617
attribute-pair candidates. Then, we conduct the same
experiments on a domain-agnostic set of schemas by
extending the domain-specific schemas with a hu-
man resources (HR) schema. We annotate 15 ad-
ditional inter-schema attribute pairs since the OC-
MySQL schema contains attribute linkages between
employees and offices. Consequently, the domain-
agnostic setting contains 11587 attribute pair candi-
dates, of which 62 are considered true. We provide a
detailed summary of the dataset in Table 2.
Signature: We uniformly preprocess the textual de-
scriptions of each entity across all collections by
concatenating the table and attribute names, splitting
concatenated words, and removing repetitive words.
Based on the comparative analysis by (Zeakis et al.,
2023), we aggregate static Glove embeddings trained
on Common Crawl without out-of-vocabulary vec-
tor retrievals (Pennington et al., 2014) and use Sen-
tence Transformer Bert (gtrt5-base) (Reimers and
Gurevych, 2019) as the best dynamic strategy.
Ranking: We use the following configurations for the
ranking methods:
• Z-Score: We use the default implementation of
the SciPy
2
library.
• LOF: We import the sklearn neighbors library
3
and specify the number of neighbors k = 15 as
these are the average number of linkages between
the entity collections.
• PCA: We use the Lapack SVD implementation of
the sklearn decomposition library
3
and use nc = 2
(number of principal components) as we deal with
a small size of |E|.
• AE: We use the Keras library and configure an au-
toencoder with three intermediate layers to extend
the network complexity to PCA. We use rectified
linear units (ReLUs), Adam as the optimizer, the
mean squared error (MSE) as the loss function,
and a shuffled test-train split of 20%. To pre-
vent identity functions, we define the small size
of ten epochs (fixed early stopping) but initialize
the model ten times and sum up each entity’s MSE
to stabilize the final entity score.
• Ensemble: We take the mean score across the
normalized entity score tuples (e
i
,s
i
) of the best-
performing configurations of Z-Score, LOF, PCA,
and AE based on APC, AHM
B
, and AHM
F
. In
this regard, an equally weighted ensemble of en-
tity scores works similarly to a random forest (su-
pervised) or consensus clustering (unsupervised).
Blocking: Blocking primarily affects the time reduc-
tion ratio, while scoping affects the completeness of
entity linkage pairs. To show this distinction, we em-
ploy two blocking modules: the first is a simplistic
entity blocking module B that schedules all potential
inter-source-linkages (Cartesian product) between the
(scoped) entity collections at point p. The second one
2
https://docs.scipy.org/doc/scipy
3
https://scikit-learn.org
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
112

Table 3: Scoping configurations and Area Under Curve PC and HM performances on OC3-HR dataset.
Scoping Domain-specific Domain-agnostic
V Signature R Ranking R Parameter APC AHM
B
AHM
F
APC AHM
B
AHM
F
Glove Z-score none 52.36 47.30 53.69 54.21 44.81 53.46
gtrt5 Z-score none 60.52 46.82 54.11 50.57 45.06 53.61
Glove LOF k = 15 54.37 45.69 52.53 52.62 44.60 53.82
gtrt5 LOF k = 15 61.59 48.19 55.40 57.69 46.91 56.20
Glove PCA n = 2 53.03 45.38 52.13 53.61 45.33 54.32
gtrt5 PCA n = 2 61.80 49.06 56.17 56.81 46.94 55.79
Glove AE 610,300,10,300,610 52.69 47.33 53.83 49.97 44.95 53.73
gtrt5 AE 778,300,10,300,778 64.05 49.45 56.73 57.58 47.11 56.02
Ensemble max
APC,AHM
B
,AHM
F
63.86 50.92 58.10 58.81 47.45 56.38
is the efficient locality-sensitive hashing-based sim-
ilarity search blocking module F implemented with
the Python package FAISS
4
(Papadakis et al., 2022)
(Paulsen et al., 2023), (Zeakis et al., 2023). This
blocking scheme queries each entity signature and
outputs a maximum of k = 50 linkage candidates
based on the L2-distanced nearest neighbors.
Scoping Results and Discussion: We evaluate the
scoping approach on the OC3-HR dataset. We re-
port the AUC metrics for the pair completeness (APC)
and the harmonic mean for the brute force (AHM
B
)
and FAISS-based (AHM
F
) blocking modules. The
results are based on the entity signature V , ranking
method R , and parameter configurations summarized
in Table 3. The best result per ranking method is
highlighted in bold. Figure 5 and 6 plot the best-
performing stand-alone and ensemble configurations
for APC and AHM with the performance (y-axis) of
the time reduction ratio (yellow), pair completeness
(blue), and the harmonic mean (green) on the increas-
ing relative threshold parameter p (x-axis). Generally,
Sentence Transformer Bert (gtrt5) signatures outper-
form word2vec (Glove) with minor exceptions for the
Z-Score method. It is worth noting that we also com-
pared two blocking methods, showing that the FAISS-
based one improved in computational time reflected
in AHM
F
. However, none of them had any effect on
the number of true linkages as measured in APC.
We first discuss the results obtained for the
domain-specific dataset. The best-performing stand-
alone model for APC and AHM is the autoencoder
with gtrt5 signatures. We explain the 2.25% domain-
specific APC improvement for autoencoders with the
ensembling training nature: autoencoders’ compres-
sion and decompression functions are trained over
multiple epochs with a shuffled train-test split of en-
tity signatures. On the contrary, the ensemble method
yields the best performance for AHM.
4
https://github.com/facebookresearch/faiss
We now discuss the results obtained for the domain-
agnostic dataset. Among the signature strategies,
all ranking methods and configurations perform the
best with gtrt5 signatures except for Z-Score in APC.
The best stand-alone APC performance is achieved
by LOF, falling 1% below the ensemble. For the
domain-agnostic dataset, the ensemble method per-
forms best in both AHM and APC. In general, the
domain-agnostic dataset contains several pairs that
are not linkable due to the fact that the schemas do not
reflect similar domains. Although the true linkages
are still captured in the domain-agnostic schemas, it
is expected to observe a decrease in the performance
metrics due to the dissimilarity of the schemas.
Summary: Evaluations on multi-sourced schemas
show that autoencoders with gtrt5 signatures perform
best in the domain-specific entity linkage task. We
highlight that this scoping configuration reduces the
search space to 77% of entities and still contains all
linkages. The impact of the ranking method is more
relevant for the domain-specific setting rather than
the domain-agnostic setting. Generally, ensembling
the entity scores of different ranking methods can
yield more robust results for both APC and AHM. Fi-
nally, all scoping configurations for both the domain-
specific and agnostic settings intersect with the graph
of the time reduction ratio at 50% (x-axis) and the pair
completeness at around 75% (y-axis). This means
that scoping can reduce the original set of entity col-
lections when the time for comparisons is limited and
still retain a high portion of true linkages.
5 CONCLUSION
This paper introduced scoping, a new phase in the EL
pipeline that ranks entities and generates a subset E
′
of the raw entity collections E while leaving intact
the major set of true linkages. We have shown that
Scoping: Towards Streamlined Entity Collections for Multi-Sourced Entity Resolution with Self-Supervised Agents
113
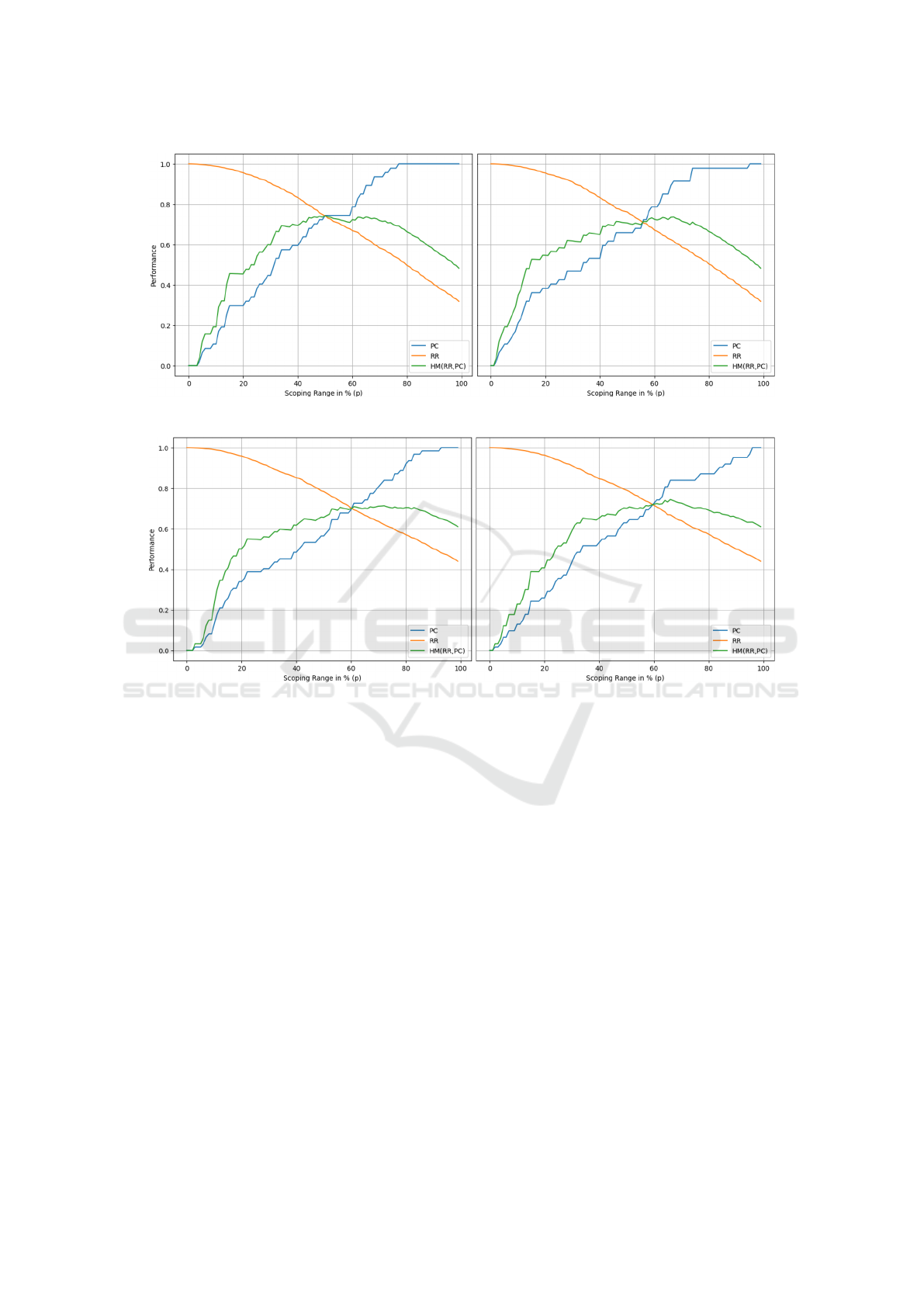
Figure 5: RR, PC, and HM performance on domain-specific OC3 dataset (left: AE with gtrt5 and right: ensemble).
Figure 6: RR, PC, and HM performance on domain-agnostic OC3-HR dataset (left: LOF with gtrt5 and right: ensemble).
models learning to compress and decompress entities
from multiple data sources can be used to scope out
linkable entities with better or almost equal perfor-
mance compared to existing ranking methods. We
see the various autoencoder network configurations
as a strength to better adapt to different numbers of
entities |E|, the dimensionality of entity signatures
¯v, and the degree of domain specificity. Moving on
to the potential advantages of self-supervised models,
we highlight that PCA and the autoencoder model can
be reused to scope new incoming entity collections.
In future work, we plan to investigate autoencoders
enriched with a multi-modal network to incorporate
textual descriptions and instances from entity profiles.
REFERENCES
Azzalini, F., Jin, S., Renzi, M., and Tanca, L. (2021). Block-
ing Techniques for Entity Linkage: A Semantics-
Based Approach. Data Science and Engineering,
6(1):20–38.
Bank, D., Koenigstein, N., and Giryes, R. (2021). Autoen-
coders. arXiv:2003.05991 [cs, stat].
Breunig, M. M., Kriegel, H.-P., Ng, R. T., and Sander, J.
(2000). LOF: identifying density-based local outliers.
ACM SIGMOD Record, 29(2):93–104.
Brunner, U. and Stockinger, K. (2020). Entity match-
ing with transformer architectures - a step forward in
data integration. Medium: application/pdf Publisher:
OpenProceedings.
Cappuzzo, R., Papotti, P., and Thirumuruganathan, S.
(2020). Creating Embeddings of Heterogeneous Re-
lational Datasets for Data Integration Tasks. In Pro-
ceedings of the 2020 ACM SIGMOD International
Conference on Management of Data, SIGMOD ’20,
pages 1335–1349, New York, NY, USA. Association
for Computing Machinery.
Gong, D., Liu, L., Le, V., Saha, B., Mansour, M. R.,
Venkatesh, S., and Hengel, A. v. d. (2019). Mem-
orizing Normality to Detect Anomaly: Memory-
augmented Deep Autoencoder for Unsupervised
Anomaly Detection. arXiv:1904.02639 [cs].
Guo, R., Sun, P., Lindgren, E., Geng, Q., Simcha, D.,
Chern, F., and Kumar, S. (2020). Accelerating large-
scale inference with anisotropic vector quantization.
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
114

Ilyas, I. F. and Rekatsinas, T. (2022). Machine Learning and
Data Cleaning: Which Serves the Other? Journal of
Data and Information Quality, 14(3):13:1–13:11.
Johnson, J., Douze, M., and J
´
egou, H. (2019). Billion-scale
similarity search with GPUs. IEEE Transactions on
Big Data, 7(3):535–547.
Koutras, C., Siachamis, G., Ionescu, A., Psarakis, K.,
Brons, J., Fragkoulis, M., Lofi, C., Bonifati, A.,
and Katsifodimos, A. (2021). Valentine: Evaluating
Matching Techniques for Dataset Discovery. In 2021
IEEE 37th International Conference on Data Engi-
neering (ICDE), pages 468–479. ISSN: 2375-026X.
Lerm, S., Saeedi, A., and Rahm, E. (2021). Extended
Affinity Propagation Clustering for Multi-source En-
tity Resolution. BTW 2021.
Papadakis, G., Fisichella, M., Schoger, F., Mandilaras, G.,
Augsten, N., and Nejdl, W. (2022). How to reduce the
search space of Entity Resolution: with Blocking or
Nearest Neighbor search? arXiv:2202.12521 [cs].
Paulsen, D., Govind, Y., and Doan, A. (2023). Sparkly:
A Simple yet Surprisingly Strong TF/IDF Blocker for
Entity Matching. Proceedings of the VLDB Endow-
ment, 16(6):1507–1519.
Pennington, J., Socher, R., and Manning, C. D. (2014).
Glove: Global vectors for word representation. In
EMNLP, volume 14, pages 1532–1543.
Reimers, N. and Gurevych, I. (2019). Sentence-bert: Sen-
tence embeddings using siamese bert-networks. In
Proceedings of the 2019 Conference on Empirical
Methods in Natural Language Processing. Associa-
tion for Computational Linguistics.
Ruff, L., Kauffmann, J. R., Vandermeulen, R. A., Mon-
tavon, G., Samek, W., Kloft, M., Dietterich, T. G., and
M
¨
uller, K.-R. (2021). A Unifying Review of Deep
and Shallow Anomaly Detection. Proceedings of the
IEEE, 109(5):756–795. arXiv:2009.11732 [cs, stat].
Shlens, J. (2014). A Tutorial on Principal Component Anal-
ysis. arXiv:1404.1100 [cs, stat].
Thirumuruganathan, S., Li, H., Tang, N., Ouzzani, M.,
Govind, Y., Paulsen, D., Fung, G., and Doan, A.
(2021). Deep learning for blocking in entity match-
ing: a design space exploration. Proceedings of the
VLDB Endowment, 14(11):2459–2472.
Traeger, L., Behrend, A., and Karabatis, G. (2022). In-
teplato: Generating mappings of heterogeneous rela-
tional schemas using unsupervised learning. In 2022
International Conference on Computational Science
and Computational Intelligence (CSCI), pages 426–
431.
Zeakis, A., Papadakis, G., Skoutas, D., and Koubarakis, M.
(2023). Pre-Trained Embeddings for Entity Resolu-
tion: An Experimental Analysis. Proceedings of the
VLDB Endowment, 16(9):2225–2238.
Scoping: Towards Streamlined Entity Collections for Multi-Sourced Entity Resolution with Self-Supervised Agents
115
