
Explainable Machine Learning for Alarm Prediction
Kalleb M. M. Abreu
1 a
, Julio C. S. Reis
1 b
, Andr
´
e Gustavo dos Santos
1 c
and Giorgio Zucchi
2 d
1
Department of Informatics, Universidade Federal de Vic¸osa, Minas Gerais, Brazil
2
R&D Department, Coopservice s.c.p.a, Reggio Emilia, Italy
Keywords:
Alarms, Machine Learning, Clustering, Classification, Explainable Model.
Abstract:
This paper evaluates machine learning models for the prediction of alarms using geographical clustering, ex-
ploring data from an Italian company. The models encompass a spectrum of algorithms, including Naive
Bayes (NB), XGBoost (XGB), and Multilayer Perceptron (MLP), coupled with encoding techniques, and
clustering methodologies, namely COOP (Coopservice) and KPP (K-Means++). The XGB models emerge as
the most effective, yielding the highest AP (Average Precision) values across models based on MLP and NB.
Hyperparameter tuning for XGB models reveals default values perform well. Our model explainability analy-
ses reveal the significant impact of geographical location (cluster) and the time interval when the predictions
are made. Challenges arise in handling dataset imbalances, impacting minority alarm class predictions. the
insights gained from this study lay the groundwork for future investigations in the field of geographical alarm
prediction. The identified challenges, such as imbalanced datasets, offer opportunities for refining methodolo-
gies. As we move forward, a deeper exploration of one-class algorithms holds promise for addressing these
challenges and enhancing the robustness of predictive models in similar contexts.
1 INTRODUCTION
Alarm systems are crucial for safeguarding individu-
als, properties, and assets, acting as deterrents to po-
tential criminals and enabling prompt responses from
security teams or police upon activation (Rutgers Uni-
versity, 2009). Predicting alarms aids patrol manage-
ment, reducing intervention time by assigning guards
to high-risk areas. Machine learning models have
been applied in various scenarios, enhancing accuracy
and efficiency in alarm prediction (Au-Yeung et al.,
2019; Meng and Kwok, 2012; Quinn, 2020; Zhuang
et al., 2020). These efforts optimize resource alloca-
tion and improve security measures in network sys-
tems (Lateano et al., 2023; Zhang and Wang, 2019)
and industries (Zhu et al., 2016).
While previous studies focus on alarm predic-
tion, they often overlook geographic locations and
lack model explainability. This work addresses these
gaps by emphasizing the geographic aspect of alarms
and prioritizing model explainability. The study
uses real data from Coopservice, an Italian service
a
https://orcid.org/0000-0001-8905-2402
b
https://orcid.org/0000-0003-0563-0434
c
https://orcid.org/0000-0002-5743-3523
d
https://orcid.org/0000-0002-5459-7290
provider offering logistics, transportation, cleaning,
maintenance, and security services, particularly car
patrolling in various provinces. Coopservice utilizes a
cluster system to optimize its routes and enhance pa-
trol efficiency (Zucchi et al., 2022). When alarms oc-
cur, patrols are dispatched, impacting defined routes.
To minimize this impact, alarm prediction within each
cluster is crucial for considering the probability of
alarm incidents when generating routes. Leverag-
ing robust machine learning algorithms, this work ex-
plores the use of such tools for alarm prediction.
Thus, the main objective of this paper is to con-
duct an analysis using real data to achieve effective
alarm prediction. The study aims to explore Ma-
chine Learning algorithms that can accurately pre-
dict alarms within a one-hour time interval to assist
companies in their efforts to manage and respond to
alarms effectively. Furthermore, the research com-
pares models based on patrols, where each patrol cor-
responds to a cluster, defined in two ways: (i) the cur-
rent clusters defined by the company and (ii) those
determined through the k-means clustering algorithm.
To facilitate the end user’s interaction with the pro-
posed approach, we explore aspects of explainability.
This allows for a clearer understanding of the model’s
decision-making process and enhances the system’s
690
Abreu, K., Reis, J., Santos, A. and Zucchi, G.
Explainable Machine Learning for Alarm Prediction.
DOI: 10.5220/0012625000003690
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 26th International Conference on Enterprise Information Systems (ICEIS 2024) - Volume 1, pages 690-697
ISBN: 978-989-758-692-7; ISSN: 2184-4992
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

usability. We expect that the strategies presented in
this work will provide valuable assistance to compa-
nies in optimizing their patrol services.
In addressing the aforementioned objectives, it is
essential to highlight that the existing literature lacks
comprehensive coverage of scenarios wherein deter-
mining not only the occurrence of alarms but also
their geographical location is crucial. This gap be-
comes particularly significant in our context, where
understanding the impact of alarms on predefined car
patrolling routes is paramount. Notably, the literature
also falls short in exploring the explainability of mod-
els within this specific domain. In contrast to prior
efforts, this study seeks to identify machine learning
algorithms capable of predicting alarms within clus-
ters, considering their geographic aspects.
The rest of the paper is organized as follows. In
Section 2, we present relevant related work. Section
3 provides a formal problem definition and introduces
the dataset used in the study. In Section 4, we present
the proposed models, tuning of hyperparameters, and
analysis of the best-performing models. Last, Section
5 presents our conclusions.
2 RELATED WORK
Several stakeholders are interested in alarm-related
works (Au-Yeung et al., 2019; Lateano et al., 2023;
Zhang and Wang, 2019) to minimize the time between
the alarm and remedial action or implement preven-
tive measures. We can group the machine learning re-
search lines applied to alarms into two sets: (i) filter-
ing and (ii) prediction. Within the (i) filtering research
works, we observe studies developed to identify false
alarms. The work of (Meng and Kwok, 2012), for
instance, highlight the issue of the high number of
false alarms generated in intrusion detection systems
(IDSs) and finds relevant results by applying machine
learning models. On the other hand, Au-Yeung et al.
(2019) deal with alert alarms in intensive care units
(ICUs) responsible for reporting changes in patient’s
psychological signals. In many situations, interven-
tions are unnecessary, and the alarms become a bur-
den. Additionally, excessive alarms in these environ-
ments can cause noise disturbances.
The efforts that follow the (ii) prediction line
mainly serve the industry and network systems. In
the industrial scenario, we have (Zhu et al., 2016) who
apply a probabilistic model to calculate the probabil-
ity of critical alarm occurrence. Quinn (2020) found
excellent results by applying artificial neural networks
to predict pressure alarms in natural gas pipelines. On
the other hand, Pezze et al. (2022) develop a Deep
Learning-based approach for predicting alarms in in-
dustrial equipment, representing a low-cost alterna-
tive to sensor-based preventive maintenance strate-
gies. In the context of networks, Zhang and Wang
(2019) propose an alarm analysis scheme for predict-
ing faults in optical transport networks using support
vector machines (SVM) and long short-term mem-
ory (LSTM). Zhuang et al. (2020) address the same
problem, who use a self-optimizing data augmenta-
tion method based on generative adversarial networks
(GANs); the results in commercial tests achieve high
accuracy. Finally, Lateano et al. (2023) address the
prediction of failures in networks through the analy-
sis of real alarm data from microwave network equip-
ment.
However, the works in both groups (i) and (ii) do
not address scenarios where it is important to deter-
mine not only the occurrence of the alarm but also its
geographic location. Unlike previous studies, these
scenarios are extremely relevant to our problem, given
that it is crucial in determining the impact of alarms
on the routes practiced in car patrolling. For example,
a car moves according to the defined route to patrol
the area, but an alarm is triggered during the displace-
ment. Since alarms represent a possibility of security
vulnerability, the patrol must respond to the call, de-
viating from the planned route. The impact of these
trajectory alterations over the year can mean a consid-
erable increase in the operation cost. Moreover, to the
best of our knowledge, there is a lack of research ex-
ploring the explainability of models within this con-
text. Thus, different from previous efforts, this work
seeks to determine machine learning algorithms that
can assist in predicting these alarms within clusters
while investigating their explainability, which would
be a significant contribution to the field of alarm pre-
diction.
3 PROBLEM DEFINITION AND
DATASET
This section introduces the alarm detection problem
using Coopservice’s patrol data. In Section 3.1, we
formally define the problem as developing a model
for detecting alarms and assigning likelihood scores
within specific clusters and time intervals. Section 3.2
presents the dataset, focusing on the studied province
and key alarm-related information. The distribution
of alarms is analyzed based on variations in month
and hour. Section 3.3 outlines the process of cluster-
ing alarms, using the K-Means++ algorithm (Arthur
and Vassilvitskii, 2007) for theoretical comparison.
Last, we discuss creating negative instances, gener-
Explainable Machine Learning for Alarm Prediction
691
ating features based on date and time, and describe
the encoding method for each feature, providing a
comprehensive overview for subsequent analysis and
model development.
3.1 Definition
Formally, we can define the problem of alarm detec-
tion considering geographical location as follows:
Definition 3.1. (Alarms Detection) Given a clus-
ter c ∈ C, and a time interval t ∈ T, a model for alarm
detection assigns a score S(c, t) ∈ [0, 1] indicating the
extent to which the pair c,t is believed to have an
alarm. A threshold τ can be defined such that the pre-
diction function F : C, T → {alarm, not alarm} is:
F(c,t) =
(
alarm, if S(c, t) > τ
not alarm, otherwise.
Our cluster definition assigns a specific geo-
graphic region for a car patrol to operate.
3.2 Overview of Dataset
The car patrol dataset from Coopservice in Italy pro-
vides rich information, featuring data from 150 pa-
trols across 30+ cities. With over 150,000 alarms
recorded between January 1, 2020, and November 6,
2022, the dataset includes essential fields like date,
geographic location (i.e., latitude and longitude), ac-
tivity type, and the associated car patrol. This dataset
offers a detailed and comprehensive perspective on
Coopservice’s car patrol activities.
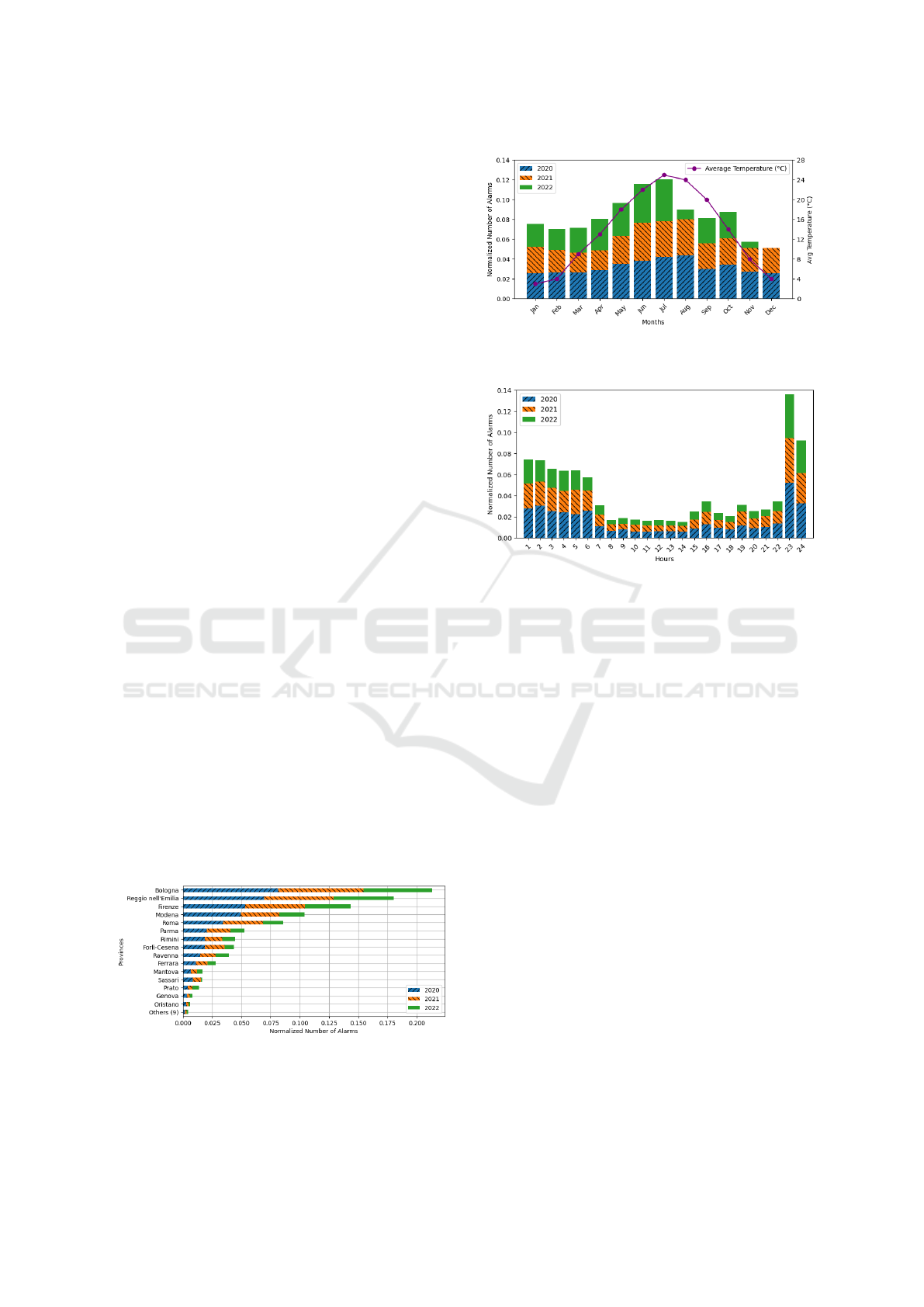
This study concentrates on analyzing alarms in
Reggio Emilia, selected due to its notable alarm activ-
ity, as illustrated in Figure 1, and its strategic signifi-
cance to the company. In Figure 2, we observe the dis-
tribution of normalized alarm numbers per month and
hour. Figure 2a portrays a consistent pattern in alarm
distribution over the years, except for August 2022.
Figure 1: Number of alarms by province. The graphs show
the number of alarms per hour and per month, with the y-
axis values normalized using the min-max normalization
technique. This process ensures that the values are scaled
between 0 and 1.
(a) Number of alarms and max temperature by months in Reg-
gio Emilia.
(b) Number of alarms by hours.
Figure 2: The graphs show the number of alarms per month
and hour, with the y-axis values normalized using the min-
max normalization technique. This process ensures that the
values are scaled between 0 and 1.
Data for November 2022 is incomplete, and Decem-
ber 2022 has no available data. The occurrences of
alarms tend to increase from April to October, align-
ing with rising temperatures and a decline in outdoor
activities during colder months. Warmer seasons, in-
cluding Italian summer holidays, witness heightened
mobility, especially towards coastal areas. The cir-
culation of people appears to be correlated with the
incidence of alarms.
Figure 2b shows higher alarm occurrences during
the night, peaking at 23 hours. Data collection during
the COVID-19 pandemic impacted alarm distribution,
with protective measures influencing the numbers.
3.3 Dataset Preprocessing
To prepare our dataset for predictions, we conduct es-
sential data cleaning steps, addressing missing values
and duplicates. Further details on additional steps are
provided in the following sections: Dataset Clustering
(Section 3.3.1), Non-alarm Instances (Section 3.3.2),
Feature Definition and Encoding (Section 3.3.3) and
Data Processing Pipeline (Section 3.3.4).
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
692
3.3.1 Dataset Clustering
According to Definition 3.1, the problem involves
classifying events into alarms or non-alarms within a
time interval in a cluster. Understanding information
about alarm clusters is crucial for optimizing patrol
routes. Currently, Coopservice’s alarm response pro-
cess considers the patrol closest to the event, irrespec-
tive of the predefined cluster for that patrol.
In our dataset, we have cluster information for pa-
trols during non-alarm activities. Using the convex
hull algorithm, we define the convex region represent-
ing each cluster. The convex hull is the smallest con-
vex polygon encompassing all given points, visual-
ized as the outer boundary.
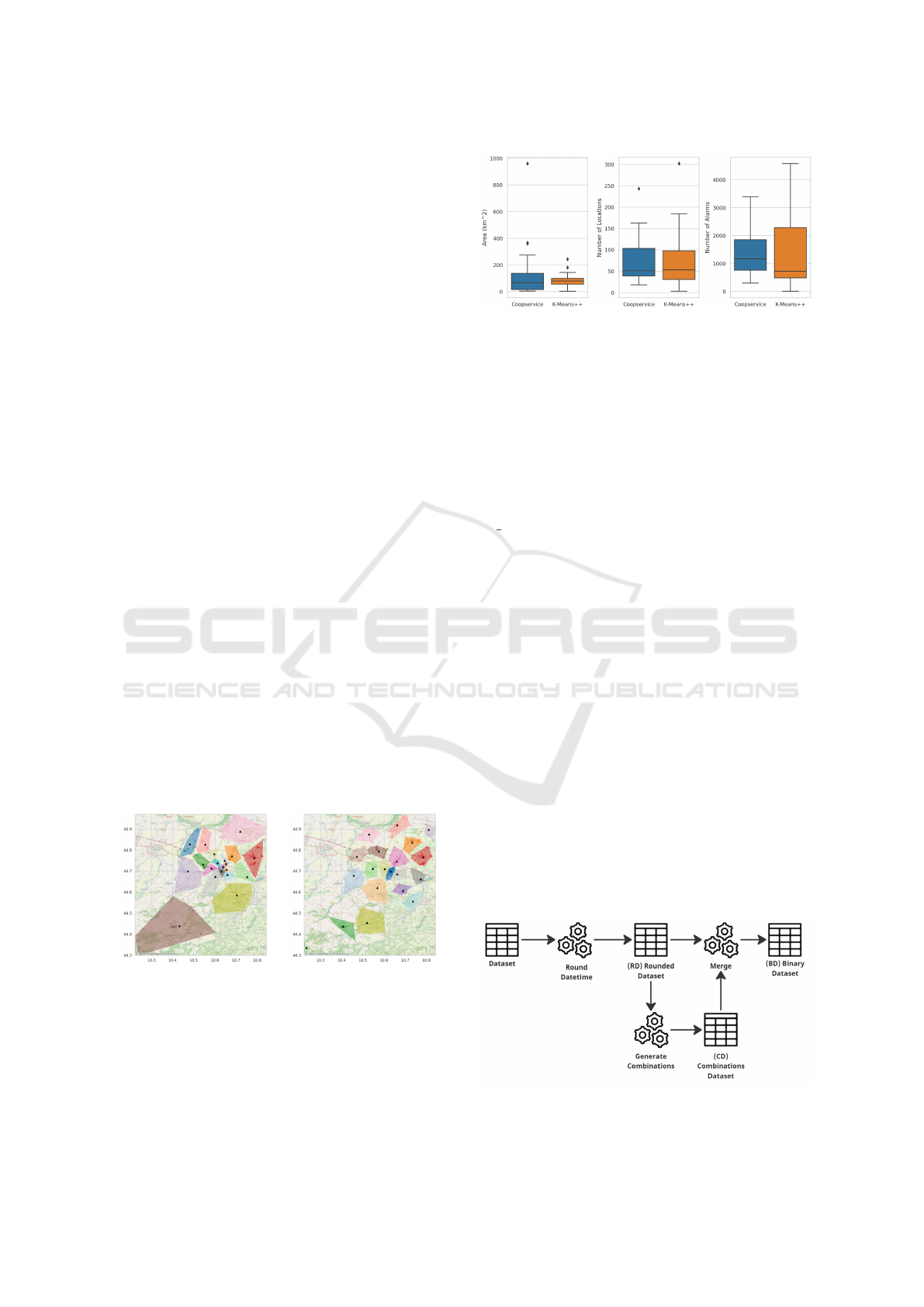
Coopservice operates with 20 patrols in Reggio
Emilia province, each represented by a distinct con-
vex region, as shown in Figure 3a. These regions
serve as clusters for alarm response. Cluster sizes
and the number of locations vary significantly, based
on Coopservice’s established practices. Some patrols
may be overloaded, covering numerous locations or
long distances, while others may be less occupied.
For comparison, we employ the K-Means++ algo-
rithm, selecting k = 20 to match Coopservice’s clus-
ters. Distances between alarms and centroids were
computed based on latitude and longitude. The re-
sults are depicted in Figure 3b.
The convex regions from both methods signifi-
cantly differ in area, location count, and alarm dis-
tribution, as seen in Figure 4. K-Means++ yields
smaller patrol coverage areas, potentially reducing
travel time. However, it exhibits extremes in loca-
tion and alarm distribution, with some clusters having
high activity and others being more idle compared to
Coopservice’s established distribution.
(a) Convex regions ob-
tained through Coopservice
patrols.
(b) Convex regions ob-
tained through K-Means++.
Figure 3: Convex regions of clusters formed through geo-
graphical locations. The centroid of the points in each con-
vex region is represented by a black triangle.
Figure 4: Boxplot comparing covered area, number of lo-
cations, and alarm distribution of convex regions generated
by Coopservice and K-Means++ methods.
3.3.2 Non-Alarm Instances
In the preceding section, we outlined how we de-
fined clusters, resulting in two datasets: one based
on Coopservice’s practices (COOP) and another using
K-Means++ with k equal to 20 (KPP). Both datasets
have two columns: datetime (alarm occurrence times-
tamp in yyyy-MM-dd hh-mm-ss format) and clus-
ter
code. Our prediction function, per Definition 3.1,
classifies outcomes as alarm or not alarm based on a
defined threshold. However, our dataset only contains
alarm occurrences, lacking negative instances. To ad-
dress this, we introduce negative occurrences through
the three-step process detailed below.
Figure 5 illustrates the steps for generating our
binary dataset (BD) with positive and negative oc-
currences. Focusing on the one-hour interval, our
first step involves rounding datetime by hour, creat-
ing the rounded dataset (RD). The second step gener-
ates hourly datetime entries for each cluster on the
first and last day through RD, forming the combi-
nations dataset (CD). For instance, a 10-day interval
with five clusters results in 1200 instances (10 days
x 24 hours x 5 clusters). Finally, we join RD and
CD, retaining all CD entries. We label entries in both
datasets as alarm and those only in CD as no alarm,
as RD only contains alarm occurrences. The result-
ing binary dataset (BD) has two classes: alarm and no
alarm, with 475,152 non-alarm instances, following
the same steps for COOP and KPP.
Figure 5: Steps to generate the binary dataset BD that in-
cludes both classes: alarm and no alarm.
Explainable Machine Learning for Alarm Prediction
693
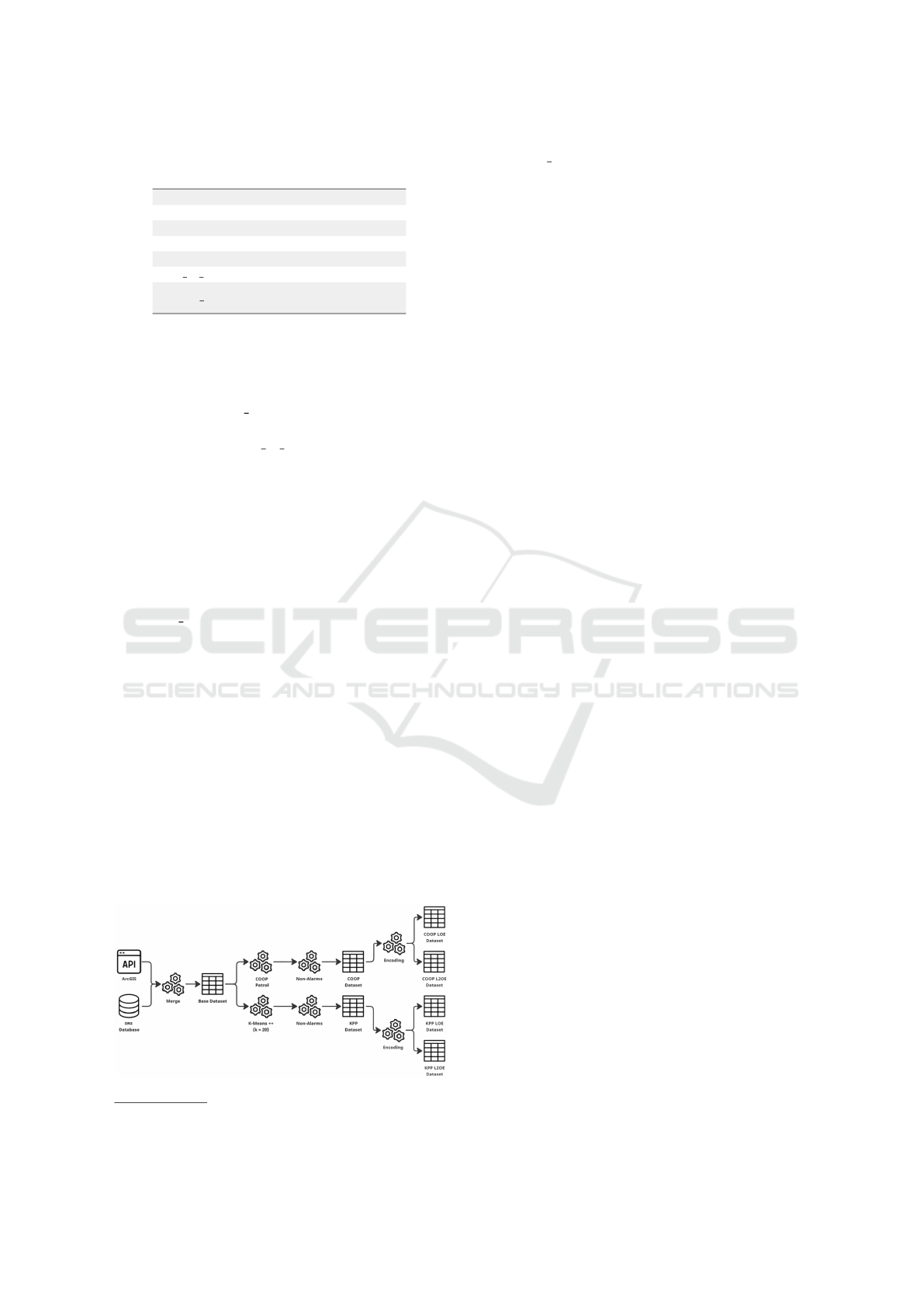
Table 1: Properties of the features for the datasets.
Feature Type Encoding
year Discrete Label/Ordinal
month Discrete Label/Ordinal
day Discrete Label/Ordinal
hour Discrete Label/Ordinal
shift Ordinal Label/Ordinal
day of week Ordinal Label/Ordinal
cluster code Nominal
One-Hot
Label/Ordinal
3.3.3 Feature Definition and Encoding
The final data processing step involves feature defini-
tion and encoding. Our datasets contain two columns:
datetime and cluster code. Using the datetime col-
umn, we generate temporal features: year, month,
day, hour, shift, and day
of week. These features help
us understand the relevance of individual time charac-
teristics for our model or their combined evaluation.
Table 1 displays the model features, data types, and
encoding methods.
3.3.4 Data Processing Pipeline
We generate four datasets using two clustering mod-
els (COOP and KPP) and two encoding methods
for cluster code: Label/Ordinal Encoding (LOE) and
Label/Ordinal/One-hot Encoding (L2OE). Figure 6
illustrates the sequential steps in our data process-
ing pipeline. Initially, we extract patrol data from
the Coopservice database and use the ArcGIS API
1
to obtain address information, transforming latitude
and longitude into city, province, and other details.
This forms the Base Dataset. Applying Coopser-
vice’s clustering methods, K-Means++, and a non-
alarm creation function, we create the COOP and KPP
datasets. Through encoding techniques, we produce
the final datasets for model training.
The datasets comprise 499,680 instances, cover-
ing alarm occurrences and non-occurrences. LOE
datasets have 7 features, while L2OE datasets boast
26 features due to One-Hot Encoding transforming
Figure 6: Illustration of the data processing pipeline.
1
https://developers.arcgis.com/python/
the cluster code feature into 20 features, each cor-
responding to a distinct cluster. The datasets exhibit
an imbalance, with only 5% of instances representing
alarm occurrences, yielding a ratio of 1 occurrence for
every 19 non-occurrences. Notably, the alarm occur-
rences in this dataset do not represent the total number
attended by Coopservice. As a cluster comprises mul-
tiple locations, an alarm in any location within a spe-
cific cluster defines an instance with an alarm in our
problem. Thus, a cluster can have multiple alarms in
a time interval without affecting our model, consider-
ing an alarm occurrence if the count is greater than 0;
otherwise, it is a non-occurrence.
4 MODELING AND ANALYSIS
This section explores model selection, evaluation, and
refinement for three machine learning models: Naive
Bayes (NB), eXtreme Gradient Boosting (XGB), and
Multilayer Perceptron Classifier (MLP). The focus is
on the efficiency of these models in predicting alarm
occurrences using two clustering methods: ORG-
2022 (COOP) and K-Means++ (KPP). Thorough as-
sessments, primarily using the AP metric.
The exploration includes hyperparameter opti-
mization, particularly for the XGB algorithm, aimed
at improving model performance. Advanced interpre-
tative techniques like the SHAP framework are also
employed to understand feature importance and the
influence of various factors on alarm classification.
Subsequent sections detail model selection in Section
4.1, hyperparameter optimization in Section 4.2, and
the analysis of the best models in Section 4.3.
4.1 Model Selection
The dataset covers 1041 days from January 1, 2020, to
November 6, 2022. Models are trained on 720 days,
representing 69.09% of the total, with a temporal split
ensuring that test data occurs entirely after the train-
ing set, minimizing bias. The remaining portion is
dedicated solely to model evaluation.
Three machine learning approaches are selected
for the study: Naive Bayes (NB) (Hand and Yu,
2001), eXtreme Gradient Boosting (XGB) (Chen and
Guestrin, 2016), and Multilayer Perceptron Classifier
(MLP) (Murtagh, 1991). These models represent dif-
ferent machine learning families: NB is probabilistic,
XGB is an ensemble, and MLP belongs to artificial
neural networks. Training is conducted on Google
Colab using Python 3, importing NB and MLP from
Scikit-Learn and XGB from the xgboost library.
Default configurations are used from the libraries,
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
694

along with identical training and test sets for a fair
comparison. Evaluation utilizes the area under the PR
curve (AP) metric, suitable for imbalanced datasets.
Our tests showed that the best model was generated
through XGB, in all scenarios (LOE, L2OE, KPP,
and COOP). Therefore, we decided to proceed with
hyperparameter optimization for XGB in order to
achieve better performance.
4.2 Hyperparameter Optimization
Our hyperparameter tuning process involves optimiz-
ing the settings of the XGB algorithm to enhance
its performance in predicting alarm occurrences. To
achieve this, we utilize a 10-fold cross-validation ap-
proach, splitting the training data into folds with dis-
tinct distributions for training, validation, and testing.
Each fold represents a 72-day interval, with a training
period of 36 days, followed by 18 days for validation
and another 18 days for testing.
The primary goal of this approach is to ensure that
the selected hyperparameters are not overly depen-
dent on specific characteristics of the training data.
By using small samples in each fold, we aim to create
a model that generalizes well to new information and
avoids overfitting issues. This separation into train-
ing, validation, and testing sets aids in the robust eval-
uation of the model’s performance.
In our hyperparameter tuning process, we allo-
cate the remaining 321 days for the final evaluation of
model AP scores. Due to the time series nature of the
problem, we adopt isolated block-wise splits, train-
ing models on one portion of the dataset, and evaluat-
ing them on subsequent chronological sections. This
practice mimics real-world scenarios where only his-
torical data is available for prediction.
Among the considered hyperparameters, we
focus on key parameters widely applicable in
XGB and other tree-based models (Developers,
2023): max depth, learning rate, n estimators,
early stopping rounds.
Throughout the 10-fold cross-validation, the con-
figuration with the best average AP across folds is
considered the optimal set of hyperparameters. Selec-
tion is based on information from the XGB documen-
tation (Developers, 2023) and the Analytics Vidhya
blog’s guide on XGB parameter tuning (Jain, 2016),
recommended by Awesome XGB
2
(DMLC, 2023).
Table 2 shows a summary of the AP obtained
from the models with default hyperparameters and
the tuned ones. The table indicates that the models
2
Awesome XGB is mentioned in the documen-
tation as a source of resources on XGB, available at
https://xgboost.readthedocs.io/en/stable/tutorials/index.html.
Table 2: AP comparison for XGB models trained with dis-
tinct clustering and encoding methods.
AP
Models Default Tuned Improvement
xgb coop loe 0.149 0.154 0.5%
xgb coop l2oe 0.148 0.155 0.7%
xgb kpp loe 0.190 0.197 0.7%
xgb kpp l2oe 0.190 0.197 0.7%
did not show significant performance improvements,
with only a 0.7% increase in AP for the KPP models
in the best case scenario. However, it is important to
note that the choice of clustering method has a more
substantial impact on the models, resulting in an ap-
proximately 4% increase in AP for the KPP models
compared to the COOP models.
For XGB models, exclusive use of Label/Ordinal
Encoding (LOE) is favored over One-Hot Encod-
ing due to comparable performance and simplicity.
LOE’s fewer features enhance model evaluation and
enable seamless applicability to datasets with con-
sistent feature numbers, fostering adaptability across
provinces with varying patrol counts. This choice
aligns with a straightforward and efficient approach to
data analysis, opening possibilities for transfer learn-
ing applications in diverse scenarios.
4.3 Analysis of Optimal Models
When dealing with complex machine learning mod-
els, it is important to be able to interpret their predic-
tions. However, achieving both accuracy and inter-
pretability can be challenging. A framework called
SHapley Additive exPlanations (SHAP) was devel-
oped by Lundberg and Lee (2017) to address this
problem. SHAP assigns importance values to fea-
tures for specific predictions, offering a unified and
theoretically supported approach. Widely used for
enhancing model interpretability, SHAP is chosen in
this work, following precedents in studies like (Li,
2022), (Ekanayake et al., 2022), and (Mangalathu
et al., 2020).
For the xgb coop loe model, Figure 7 illus-
trates SHAP information. The feature ranking
highlights the crucial impact of hour, cluster code,
and day of week, with significantly higher absolute
SHAP values compared to other features. The dis-
tribution of feature values against SHAP values, re-
veals how different features impact the classification
of alarm occurrences or non-occurrences. The distri-
bution, aligned with SHAP values, highlights that ex-
treme hours (both low and high) and weekends pos-
itively influence alarm occurrences, often associated
with minimal pedestrian traffic, particularly during
sleeping hours.
Explainable Machine Learning for Alarm Prediction
695
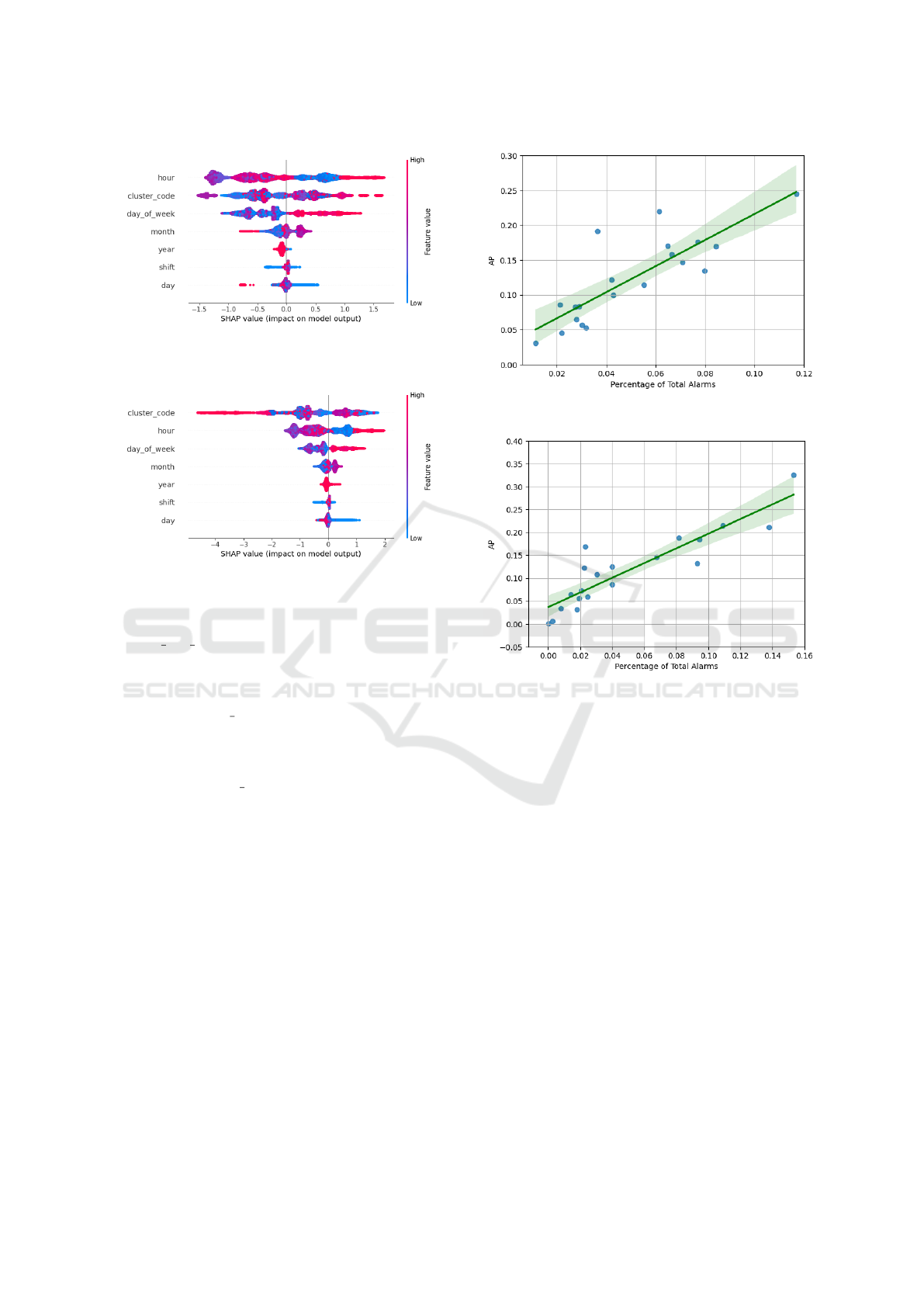
Figure 7: Feature importance and distribution analysis us-
ing SHAP scores for the COOP model.
Figure 8: Feature importance and distribution analysis us-
ing SHAP scores for the KPP model.
In Figure 8, a parallel analysis is conducted for
the xgb kpp loe model, mirroring the approach taken
with the previous model. The findings reveal a
model emphasis on times with low pedestrian traf-
fic and weekends for KPP. A noteworthy difference
surfaces as cluster
code emerges as the most crucial
feature, underscoring its significance in enhancing the
model’s performance. Interestingly, the contribution
of each feature to the models shows closely aligned
values, with cluster code standing out with notably
higher importance.
Analyzing the correlation between the model’s AP
for each cluster and the percentage of alarms within
clusters in Figure 9 reveals intriguing relationships.
For COOP in Figure 9a, and KPP in Figure 9b there’s
a positive correlation of 0.830 and 0.900, respectivaq-
mente. Clusters with more alarms are more readily
assessed by the XGB model.
These observations underscore the varied impli-
cations of alarm distribution within clusters on model
efficacy. Employing k-means for distribution yielded
clusters with higher alarm density compared to the
strategy employed by Coopservice. Consequently,
clusters exhibiting higher alarm density demonstrate
superior performance in alarm prediction. This find-
ing sheds light on the crucial role of data distribution
strategies in optimizing predictive model outcomes.
As clusters play a crucial role in alarm predic-
(a) AP and alarm percentage for COOP clusters.
(b) AP and alarm percentage for KPP clusters.
Figure 9: Comparative analysis of AP-alarm percentage
correlations for COOP and KPP clusters.
tions, enhancing collaboration between the route op-
timizer and the alarm predictor is relevant. Assign-
ing an AP score to each cluster and time of day is a
promising approach. The optimizer can then priori-
tize alarm predictions for clusters and time slots with
higher scores, reducing significance for those with
lower accuracy.
This strategy optimizes resource allocation, en-
hancing the efficiency of the alarm response sys-
tem. Patrol teams are dispatched more reliably, reduc-
ing unnecessary deployments to regions with lower
prediction accuracy. Incorporating AP scores into
decision-making fine-tunes the system to each clus-
ter’s characteristics and variations in alarm occur-
rence patterns throughout the day.
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
696

5 CONCLUSIONS
Our paper evaluated machine learning models across
three algorithms, two encoding methods, and two
clustering techniques for alarm prediction using
data from an Italian company. XGB, particularly
with K-Means++ clustering, showed the highest
performance. Despite hyperparameter tuning,
improvements were marginal. SHAP analysis em-
phasized key features like cluster identification and
alarm time. However, further study is needed as our
best scenarios fell below 0.5 AP. As future work,
we intend to explore techniques for dealing with
highly unbalanced datasets or one-class classification
algorithms.
ACKNOWLEDGEMENTS
K. Abreu, J. Reis, and A. Santos are grateful to
CAPES and FAPEMIG for funding different parts of
this work.
REFERENCES
Arthur, D. and Vassilvitskii, S. (2007). K-means++: The
advantages of careful seeding. In Proceedings of the
Eighteenth Annual ACM-SIAM Symposium on Dis-
crete Algorithms, SODA ’07, page 1027–1035, USA.
Society for Industrial and Applied Mathematics.
Au-Yeung, W.-T. M., Sahani, A. K., Isselbacher, E. M., and
Armoundas, A. A. (2019). Reduction of false alarms
in the intensive care unit using an optimized ma-
chine learning based approach. npj Digital Medicine,
2(1):86.
Chen, T. and Guestrin, C. (2016). XGBoost. In Proceedings
of the 22nd ACM SIGKDD International Conference
on Knowledge Discovery and Data Mining. ACM.
Developers, X. (2023). Xgboost documentation.
https://xgboost.readthedocs.io/en/stable/index.html.
Accessed on: November 30, 2023.
DMLC (2023). Xgboost: Scalable and flexible gradient
boosting. https://github.com/dmlc/xgboost.
Ekanayake, I., Meddage, D., and Rathnayake, U. (2022). A
novel approach to explain the black-box nature of ma-
chine learning in compressive strength predictions of
concrete using shapley additive explanations (shap).
Case Studies in Construction Materials, 16:e01059.
Hand, D. J. and Yu, K. (2001). Idiot’s bayes: Not so stupid
after all? International Statistical Review / Revue In-
ternationale de Statistique, 69(3):385–398.
Jain, A. (2016). Mastering xgboost parameter tuning: A
complete guide with python codes. Accessed on 2023-
11-30.
Lateano, F., Ayoub, O., Musumeci, F., and Tornatore, M.
(2023). Machine-learning-assisted failure prediction
in microwave networks based on equipment alarms.
In 2023 19th International Conference on the Design
of Reliable Communication Networks (DRCN), pages
1–7.
Li, Z. (2022). Extracting spatial effects from machine learn-
ing model using local interpretation method: An ex-
ample of shap and xgboost. Computers, Environment
and Urban Systems, 96:101845.
Lundberg, S. M. and Lee, S.-I. (2017). A unified approach
to interpreting model predictions. In Proceedings of
the 31st International Conference on Neural Informa-
tion Processing Systems, NIPS’17, page 4768–4777,
Red Hook, NY, USA. Curran Associates Inc.
Mangalathu, S., Hwang, S.-H., and Jeon, J.-S. (2020).
Failure mode and effects analysis of rc members
based on machine-learning-based shapley additive ex-
planations (shap) approach. Engineering Structures,
219:110927.
Meng, Y. and Kwok, L.-f. (2012). Adaptive false alarm fil-
ter using machine learning in intrusion detection. In
Wang, Y. and Li, T., editors, Practical Applications
of Intelligent Systems, pages 573–584, Berlin, Heidel-
berg. Springer Berlin Heidelberg.
Murtagh, F. (1991). Multilayer perceptrons for classifica-
tion and regression. Neurocomputing, 2(5):183–197.
Pezze, D. D., Masiero, C., Tosato, D., Beghi, A., and Susto,
G. A. (2022). Formula: A deep learning approach for
rare alarms predictions in industrial equipment. IEEE
Transactions on Automation Science and Engineer-
ing, 19(3):1491–1502.
Quinn, C. (2020). Alarm forecasting in natural gas
pipelines. Master’s thesis, Milwaukee, Wisconsin.
Rutgers University (2009). Rutgers study finds
alarm systems are valuable crime-fighting tool.
https://www.rutgers.edu/news/rutgers-study-finds-
alarm-systems-are-valuable-crime-fighting-tool.
Accessed on May 15, 2023.
Zhang, M. and Wang, D. (2019). Machine learning based
alarm analysis and failure forecast in optical net-
works. In 2019 24th OptoElectronics and Commu-
nications Conference (OECC) and 2019 International
Conference on Photonics in Switching and Computing
(PSC), pages 1–3.
Zhu, J., Wang, C., Li, C., Gao, X., and Zhao, J. (2016).
Dynamic alarm prediction for critical alarms using a
probabilistic model. Chinese Journal of Chemical En-
gineering, 24(7):881–885.
Zhuang, H., Zhao, Y., Yu, X., Li, Y., Wang, Y., and Zhang,
J. (2020). Machine-learning-based alarm prediction
with gans-based self-optimizing data augmentation in
large-scale optical transport networks. In 2020 Inter-
national Conference on Computing, Networking and
Communications (ICNC), pages 294–298.
Zucchi, G., Corr
ˆ
ea, V. H., Santos, A. G., Iori, M., and Yag-
iura, M. (2022). A metaheuristic algorithm for a multi-
period orienteering problem arising in a car patrolling
application. In INOC, pages 99–104.
Explainable Machine Learning for Alarm Prediction
697
