
Multi-Layer Energy Management System for Cost Optimization of
Battery Electric Vehicle Fleets
R
´
obinson Medina
1 a
, Nikos Avramis
1 b
, Subhajeet Rath
1 c
, Mohammed Mahedi Hasan
3 d
,
Dai-Duong Tran
3 e
, Zisis Maleas
4 f
, Omar Hegazy
3 g
and Steven Wilkins
1,2 h
1
Powertrains Department, TNO, The Netherlands
2
Electrical Engineerging, Eindhoven Unviersity of Technology, The Netherlands
3
Electrical Engineering and Power Electronics, Vrije Universiteit Brussels, Belgium
4
Operations Research, Centre for Research & Technology Hellas, Greece
Keywords:
Energy Management System, Battery Electric Vehicle, Smart Charging, Vehicle Speed Advise,
Vehicle Thermal Optimization, Vehicle Routing Problem.
Abstract:
One of the biggest barriers for a wider adoption of Battery-Electric Vehicles (BEVs) is their relatively higher
cost compared to their combustion-based alternatives. A potential solution is to develop Energy Management
Systems (EMSs), which make a more efficient use of the vehicle energy, resulting in a cheaper operation.
EMSs are commonly composed of algorithms operating at fleet and vehicle layers. For example, at fleet layer
one can find eco-routing for optimising the vehicle route, and eco-charging for smart charging. Likewise, at
vehicle layer one can find algorithms such as eco-driving for minimizing speed-related losses and eco-comfort
for minimizing the thermal-components energy consumption. These eco-functions affect the operational cost
of the fleet due to reduction of metrics such as energy consumption and travelling time (which impacts labor
costs). This paper presents the development of a multi-layer EMS, which integrates the aforementioned fleet
and vehicle-level eco-functions. The paper focuses on the energy and operational cost savings that such a
multi-layer EMS can bring to a fleet owner. Simulation results show that the EMS saves on costs produced by
travelling time and energy consumption. However, the ideal ratio between these savings ultimately depends
on the region, as electricity price and labor costs vary greatly.
1 INTRODUCTION
Battery-Electric Vehicles (BEVs) are currently
emerging as a viable replacement for Internal-
Combustion Engine (ICE)-based vehicles in many
transport sectors (Smith, 2010; Ewert et al., 2020).
This replacement is mostly motivated by the en-
vironmental advantages that BEVs have, such as
zero-tailpipe emissions and lower well-to-wheel
emissions (Ahmadi, 2019; Gao et al., 2023). For
some light-duty commercial applications, such as
a
https://orcid.org/0009-0001-2214-6153
b
https://orcid.org/0009-0007-3345-1018
c
https://orcid.org/0000-0001-8655-0334
d
https://orcid.org/0000-0001-7663-4948
e
https://orcid.org/0000-0002-3593-0748
f
https://orcid.org/0000-0003-1909-1259
g
https://orcid.org/0000-0002-8650-7341
h
https://orcid.org/0000-0001-9498-2321
last-mile deliveries, the current available BEVs are
already a feasible alternative for ICE (Siragusa et al.,
2022; Sendek-Matysiak et al., 2022). However,
BEVs still face multiple challenges such as increased
costs (compared to ICEs) (Anosike et al., 2023). This
challenge can be partially overcome by the usage of
Energy Management Systems (EMSs), which seek to
make the operation of BEVs more efficient.
Commonly, EMSs are developed to optimize a
single aspect of the vehicle operation. Such EMSs
are found on fleet or vehicle layers. For example,
when applied directly on the vehicle, one can find al-
gorithms such as eco-comfort and eco-driving, which
are focused on reducing the on-board energy con-
sumption. Specifically, an EMS such as eco-comfort
minimizes the energy consumption of all thermal
components in the vehicle while eco-driving provides
a speed advise for the driver which minimizes the
energy consumption of the vehicle powertrain. Ex-
amples of such algorithms can be found in (Kwak
112
Medina, R., Avramis, N., Rath, S., Hasan, M., Tran, D., Maleas, Z., Hegazy, O. and Wilkins, S.
Multi-Layer Energy Management System for Cost Optimization of Battery Electric Vehicle Fleets.
DOI: 10.5220/0012627000003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 112-124
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

et al., 2023; Naeem, 2023; Medina et al., 2020).
(Kwak et al., 2023) developed an eco-comfort algo-
rithm that is based on a model predictive controller,
to achieve energy savings up to 35%. (Naeem, 2023)
designed a strategy that provides speed advise to the
driver, to maximize the BEV range and battery health.
Simulation results show energy improvements of up
to 20%. (Medina et al., 2020) co-designed an eco-
comfort and eco-driving for passenger-vehicles appli-
cations, showing that the individual savings of each
eco function (partially) adds up to up to 7.1%.
Likewise, when the EMSs are applied on a fleet
layer, the algorithms focus on organizing the fleet op-
erations on an efficient way via algorithms such as
eco-routing and eco-charging. Eco-routing produces
vehicle routes that minimizes the traveling time of
the whole fleet, while eco-charging provides a charg-
ing schedule that minimizes the total charging costs.
Examples of such algorithms can be found in (Lera-
Romero et al., 2024; Geerts et al., 2022; Zhang et al.,
2021). (Lera-Romero et al., 2024) designed an eco-
routing algorithm for last-mile deliveries which inte-
grates variability in the vehicle energy consumption
induced by the drive cycle. Simulation results show
that the scope of unfeasible problems is reduced, due
to the more precise prediction on energy consump-
tion of the algorithm. (Geerts et al., 2022; Zhang
et al., 2021) presented fleet-charging strategies for
light-duty vehicles and electric busses, respectively,
which minimized the operational costs due to elec-
tricity and battery degradation.
Combinations of these fleet-layer algorithms are
also common. For example, (Cataldo-D
´
ıaz et al.,
2024) presented a co-design of an eco-routing and
eco-charging algorithm, where the latter enables the
usage of the battery to its full capacity (i.e., 100%
instead of only the fast charging range), which in-
creases the efficiency of the routing problem. Like-
wise, (Lacombe, 2023) proposed a distributed opti-
mization method to combine fleet-level driving strate-
gies with charging strategies (i.e., eco-driving and
eco-charging).
All of these EMSs show savings due to one or two
algorithms operating exclusively in the fleet or vehi-
cle layer. Only in our technical report (Medina et al.,
2023), the energy interaction of all four mentioned
eco-functions is described. To the best of the authors
knowledge, the operational cost savings of the four
mentioned eco-functions has not been shown before.
This paper presents the interactions of multiple al-
gorithms in a multi-layer EMS for BEV fleets. The
multi-layer EMS is composed of fleet (eco-routing
and eco-charging) and vehicle layers (eco-driving and
eco-comfort). The resulting interactions are described
not only on the potential of energy savings, but also
in the total operational costs of using the EMS.
The remaining of this document is divided as fol-
lows. Section 2 describes the design of the multi-layer
EMS. A realistic case study is described in Section 3,
where multiple types of light-duty based deliveries
are used; Section 4 shows simulation results where
the interactions of the multi-layer EMS is analysed.
The paper closes with conclusions in Section 5.
2 MULTI-LAYER EMS DESIGN
This section presents a summary of the design of the
multi-layer EMS. The complete version of the design
can be seen in (Medina et al., 2023). The multi-layer
EMS is composed of two fleet-layer algorithms (eco-
charging and eco-routing), together with two vehicle-
layer algorithms (eco-driving and eco-comfort).
2.1 Eco-Charging Algorithm
2.1.1 General Description of eco-charging
The objective of eco-charging algorithm is to gener-
ate a charging schedule for a fleet of BEVs, while
reducing the charging-related costs. The charging
schedule refers to the charging power profile for each
vehicle in a fleet within a time window. The algo-
rithm fulfills multiple objectives such as completing
the charging operation within a charging window and
reaching a target State-of-Charge (SoC) before the ve-
hicle departure while, adhering to grid/charger capac-
ity constraints.
Fig. 1 shows a schedule for a fleet of N BEVs
in a charging depot, where the time-slot available for
charging is marked in green. During this window of
opportunity, vehicle i must be charged from an ini-
tial SoC (
¯
z
i
) to a target SoC (¯z
i
). The output of eco-
charging algorithm is the charging power (P
c
) per ve-
hicle and time slot that can be drawn from the charger.
2.1.2 Mathematical Formulation of eco-charging
The complete mathematical formulation for the prob-
lem statement can be found in (Rath et al., 2023),
where the optimization problem for eco-charging is
defined as
min
P
c
J
el
+ J
ca
+ J
cy
(1a)
s.t.
∑
N
i=1
i
j
P
c
≤
ˆ
P
G
, ∀ j ∈ T (1b)
P
c
∈ {{0} ∪ {[
¯
P
c
,
¯
P
c
]}}
n
(1c)
¯z
i
≤ z
i
≤ 1, ∀ i ∈ V, (1d)
Multi-Layer Energy Management System for Cost Optimization of Battery Electric Vehicle Fleets
113
Time
Vehicle 1
1
1
Vehicle 2
2
2
Vehicle
Vehicle N
09:00
09:15
09:30
· · ·
· · ·
20:00
20:15
20:30
Figure 1: Overview of eco-charging algorithm.
The objective of Eq. 1 is to minimize the cost of
operation during fleet charging. In this work, the cost
due to electricity from the grid (J
el
) and cost due to
battery degradation as cyclic and calendar aging (J
ca
and J
cy
) are considered in the objective function. Note
that there might be other charging-related costs such
as the ones related to charging losses operation or
grid-related costs (Donateo et al., 2014; Geerts et al.,
2022). Including these costs remains an open research
question.
The cost of electricity from the grid is
J
el
= E
el
· ε
c
· P
c
· ∆t
c
, (2)
where E
el
is the time-varying price of electricity, P
c
is the vector of charging power at every available
time-slot, ε
c
is the efficiency of charging from grid-
to-vehicle and ∆t
c
is the length of a time-slot in hours.
The battery degradation cost is given by
J
ca
= E
bat
· a
1
· z ·10
6
· e
−a
3
/T
P
t
0.75
/
˜
C
e f f
B
, (3)
J
cy
= E
bat
· b
4
· (P
c
/
¯
C
B
) ·
p
Q/
˜
C
e f f
B
. (4)
where E
bat
is the effective battery cost, z is the vector
of SoC at every available time-slot, T
P
and t are the
battery pack temperature and time elapsed for calen-
dar aging,
¯
C
B
and Q are maximum battery capacity
and charge throughput during cyclic aging and
˜
C
e f f
B
is the required capacity drop (normalized) after which
the battery is considered at its End-of-Life (EoL). a
x
and b
y
are battery-specific aging parameters.
Let V and T be a set of all vehicles and time-slots.
Variable
i
j
P
c
∈ P
c
can be defined as the charge power
for vehicle i ∈ V at time-slot j ∈ T.
The optimization problem is subject to three con-
straints. Eq. 1b describes the constraint due to grid
capacity where the total power drawn by the vehicle
at every time-slot must be below the maximum power
supplied by the grid to the vehicle (
ˆ
P
G
).
ˆ
P
G
takes into
account the charging efficiency and scales the grid
capacity to vehicle level. Eq. 1c limits the charging
power between
¯
P
c
and
¯
P
c
during the charging process
while at rest it is set to 0. Here,
¯
P
c
and
¯
P
c
are the min-
imum and maximum charging power of the charger.
Eq. 1d constrains the vehicle SoC to reach the target
SoC without exceeding 1.
The algorithm assumes that the number of charg-
ers is equal to the number of vehicles. The charg-
ing characteristics of the battery are considered lin-
ear, i.e., the SoC increases proportionally with the
charge power. It is also assumed that the charging
window and initial and target SoC are known in ad-
vance and that a charging event cannot be interrupted
once started. Further details about the eco-charging
implementation are given in (Rath et al., 2023).
2.2 Eco-Routing Algorithm
2.2.1 General Description of eco-routing
The objective of eco-routing algorithm is to gener-
ate the optimal route that a delivery vehicle must
follow to minimize energy consumption of the fleet.
The problem is constrained by battery and payload
capacity, completion of all deliveries within a stipu-
lated time and ensuring the the vehicle has adequate
charge to complete the delivery route. Such prob-
lems are defined under the broader category of Vehi-
cle Route Problems (VRPs), which are computation-
ally NP-Hard (nondeterministic polynomial time). In
this work, an advanced Mixed Integer Optimization
Problem (MIP) technique (branch and cut) is used to
improve the execution time of the optimizer, as de-
scribed in (Kallehauge et al., 2005).
2.2.2 Mathematical Formulation of eco-routing
A graph G = (V, A) is defined where V is the set of
stops and A is the set of Arcs (connecting the stops).
c
i j
, f
i j
and t
i j
are defined as consumption (kWh), load
(parcels) and time (minutes) when the vehicle moves
from stop i to j. Q is the maximum capacity of the
vehicle and r time available to recharge the vehicle.
A variable x
i j
can be defined as
x
i j
=
(
1, If vehicle moves from stop i to j
0, Otherwise.
The optimization problem is formulated as a VRP
with a single time window, battery and capacity con-
straints and charging operations as
min
x
∑
i ∈ V
∑
j ∈ V
c
i j
x
i j
(5a)
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
114
s.t.
∑
i ∈ V
x
i j
= 1, ∀ j ∈ V , i ̸= j (5b)
∑
j ∈ V
x
i j
= 1 ∀ i ∈ V , i ̸= j (5c)
∑
i ∈ V
x
0 j
≥ ⌈
|
N
|
/Q⌉ (5d)
∑
j ∈ V
x
0 j
=
∑
j ∈ V
x
j0
(5e)
f
i j
≤ Qx
i j
, ∀ i ∈ V , i ̸= j (5f)
∑
j ∈ V /0
f
0 j
−
∑
j ∈ V /0
f
j0
≥ −Q (5g)
∑
j∈V, i∈V, i̸= j
x
i j
t
i j
≤ 480 − 30r (5h)
∑
j∈V, i∈V, i̸= j
x
i j
c
i j
≤ 0.8 + 0.3r (5i)
∑
j∈V, i∈V, i̸= j
x
i j
≤| S | −1, ∀S ⊆ V /{0}. (5j)
The objective function of Eq. 5a minimizes the to-
tal energy consumption by reducing the total driven
distance. Eqs. 5b, 5c and 5e ensure that the vehicle
enters a node (request) and after dropping the order,
exits the node. Eq. 5d forces the vehicle to go to the
depot at least as many times as needed based on load
capacity constraints. Eqs. 5f and 5g ensure that the
vehicle does not exceed the capacity of the cargo body
and during every visit to the depot it can be loaded
with up to the available capacity, respectively. Eq. 5h
ensures that the total driving time and charging time
are not more than a time window of 8 hours (480 min-
utes). Similarly, Eq. 5i ensures that the SoC at the
start of the route and the additional charging that may
be performed during the day are enough to complete
the route. Finally, Eq. 5j is the subtour elimination
constraint. Subtours are paths that visit a subset of
nodes, without circling back to the depot.
2.3 Eco-Driving Algorithm
2.3.1 General Description of eco-driving
The goal of the eco-driving algorithm is twofold: first,
to provide a speed advice to the driver and second to
provide eco-comfort with a prediction of the traction
power consumption for a certain period ahead.
The eco-driving algorithm uses an offline heuris-
tic way to determine the maximum acceleration and
deceleration of the vehicle. Using an offline heuristic
eases implementation, as it does not require a power-
ful computational platform or online data connectivity
for prediction information. However, as all the data is
precomputed, changes along the drive cycle result in
suboptimal solutions.
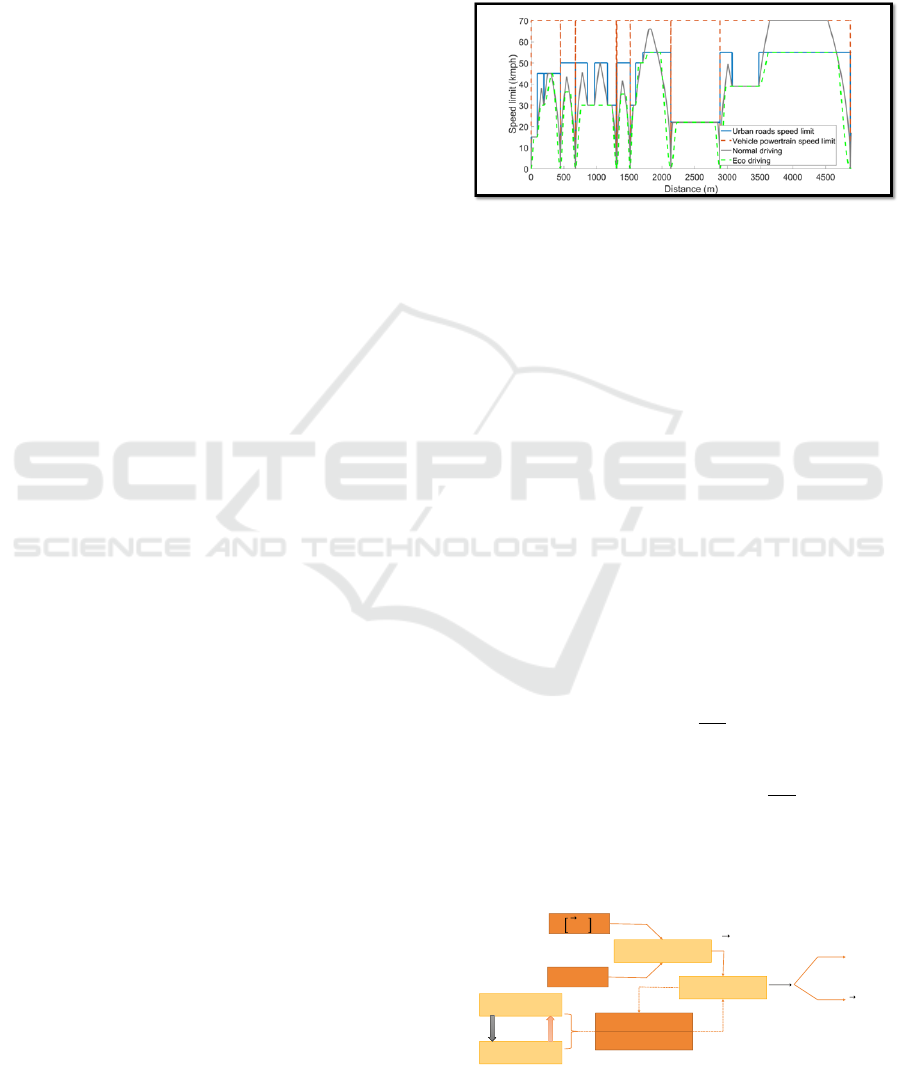
The heuristic algorithm generates a smooth speed
profile without high power peaks, which leads to en-
ergy savings (Han et al., 2019; Ajanovi
´
c et al., 2018).
Additionally, the maximum speed of the vehicle is
limited to further obtain energy savings, which is spe-
cially relevant in an urban environment.
Figure 2: Optimal and regular driving speed limits.
However, these rules result in an increased travel-
ling time for the BEV, creating a trade-off is between
energy savings and travelling time. Fig. 2 shows an
example of how the speed limits are adjusted due to
eco-driving and also how the acceleration profile is
affected.
2.3.2 Mathematical Formulation of eco-driving
The inputs from eco-driving include a vector of coor-
dinates with latitude and longitude (
⃗
φ,
⃗
λ) and a vec-
tor of speed limits ⃗v
lim
along the upcoming trip. An
overview of eco-driving can be seen in Fig. 3. Eco-
driving uses these inputs to create an optimal speed
profile ⃗v
opt
, following the next steps:
1. Create a distance profile
⃗
∆
d
per input coordinate.
Each point in distance vector ∆
d,i
is calculated us-
ing the Haversine formula:
∆
d,i
=2rsin
−1
sin
2
∆φ
i
2
+
cos(φ
i
)cos (φ
i+1
)cos
2
∆λ
i
2
!
0.5
,
(6)
where r is the Earth radius, φ
i
∈
⃗
φ , ∆λ
i
= λ
i+1
−
λ
i
, and ∆φ
i
= φ
i+1
− φ
i
, with i = [1,. ... ,|
⃗
φ|].
⃗
Energy savings
Travelling time
Trade-off
,
⃗
Maximum speed
Maximum speed
Acceleration limit
Δ
,
Optimize speed
Prediction matrix
Figure 3: Eco-driving topology overview.
Multi-Layer Energy Management System for Cost Optimization of Battery Electric Vehicle Fleets
115

2. An acceleration vector ⃗a
tmp
is computed using
the kinematics equation a
tmp,i
=
v
2
lim,i+1
−v
2
lim,i
2∆
d,i
, with
a
tmp,i
∈⃗a
tmp
, v
lim,i
∈⃗v
lim
and i = [1,. ... ,|⃗a
tmp
|].
3. A new acceleration vector ⃗a is computed using an
acceleration limit
a. That is, a
i
= max(a
tmp,i
,a),
a
i
= min(a
tmp,i
,−a), with a
i
∈⃗a.
4. An intermediate velocity vector
⃗
V
int
, is calculated
using ⃗a and the kinematic equation from step 2.
5. A velocity vector
⃗
V
f in
is computed by limiting
⃗
V
int
to speeds up to V , i.e., V
f in,i
= max(V
int,i
,V ) with
V
f in,i
∈
⃗
V
f in
.
6. A duration vector
⃗
t is created using the kinematic
equation ∆t
i
= 2∆
d
/(V
f in,i+1
+V
f in,i
), where t
i
=
t
i−1
+ ∆t
i
and t
i
∈
⃗
t.
7. The energy requirements of the drive cycle are then
computed. To do so, the traction force F
tr
is com-
puted using:
F
tr
=
1
2
ρc
d
A
f
v
2
f in,i
+ c
r
mgcos(α) + mgsin(α) + ma
i
,
(7)
where ρ, c
d
, A
f
, c
r
, m and α are the air density,
air drag, frontal area, rolling resistance, vehicle
mass and road grade, respectively. The traction
power
⃗
P
tr,pred
and energy
⃗
E
tr,pred
are computed as:
⃗
P
tr,pred
= F
tr
⃗v
f in
,
⃗
E
tr,pred
=
Z
⃗
P
tr,pred
dt. (8)
8. Using E
tr,pred
and
⃗
t, the trip energy consumption
and traveling time can be evaluated. In case they
are not satisfactory, steps 3-7 are to be recomputed
using new values for a and v. A satisfactory result
depends on the particular use case, as it will be
shown in Section 3.3. Once the result is satisfac-
tory, the optimal speed vector is defined as
⃗
V
opt
=
⃗
V
f in
.
⃗
V
opt
then is used as speed setpoint for the driver v
st p
,
which is updated during the drive cycle.
2.4 Eco-Comfort Algorithm
2.4.1 General Description of eco-comfort
The eco-comfort algorithm provides temperature set-
points for the thermal systems of the vehicle, namely
the cabin, refrigerated cargo (if applicable) and the
battery pack. To reduce execution time and guar-
antee an optimal solution, the algorithm uses con-
vex models for all energy-consuming vehicle compo-
nents. Additionally, the algorithm leverages weather
forecast data, as well as the traction power profile es-
timated in eco-driving, to minimize the energy con-
sumption of the thermal systems over a time horizon.
48V Battery
ℎ
Cabin
ℎ
Battery Thermal
𝑏
ℎ
𝑏
𝑏
A
Refrigerated Body
ℎ
Motor
ℎ
𝑏
Driven
wheels
Figure 4: Eco-comfort topology overview.
2.4.2 Mathematical Formulation of eco-comfort
The vehicle components that consume electrical en-
ergy are first defined. The basic modelling principle
is described by the power exchange among such com-
ponents. Fig. 4 shows this power exchange.
The system consists of energy buffers (x) and
power converters (h). Node A represents the inter-
connection for subsystems in the electrical power do-
main, e.g., the high-voltage bus. The sub indexes
M =
{
bat,rb,cab,bth, em
}
describe the subsystems
of the vehicle: the battery (bat), cabin (cab), refrig-
erated body (rb), electric motor (em) and the thermal
system of the battery (bth).
To formulate a convex optimization problem, the
relationship between an input (u
m
) and output (y
m
)
power in each subsystem, which represents the power
losses, is written in a quadratic form:
y
m
+
1
2
q
m
u
2
m
+ f
m
u
m
+ e
m
= 0, (9)
with m ∈ M , q
m
, f
m
and e
m
are parameters.
The following states are defined: x
bat
is the battery
charge, while x
rb
, x
cab
and x
bth
are the stored thermal
energies in the refrigerated body, further described as:
x
n,k+1
= A
n
x
n,k
+ B
n
u
n,k
+ B
d,n
d
n,k
, (10)
where n ∈
{
bat,rb,cab,bth
}
, A
n
, B
n
and B
d,n
, are
the state, input and input disturbance matrices, d
n,k
a
disturbance, k is the time instant index.
The objective of the optimization is to reduce bat-
tery energy consumption, while preserving passenger
thermal comfort. The objective function is defined as:
min
u
n,k
∑
k∈K
w
1
u
bat,k
+ w
2
T
cab
− T
cab,sp
2
(11a)
+ w
3
T
rb
− T
rb,sp
2
+ w
4
T
bth
− T
bth,sp
2
s.t. X
n,k+1
= A
n
X
n,k
+ B
n
U
n,k
+ B
d,n
D
n,k
(11b)
X ≤ X
k
≤ X (11c)
U ≤ U
k
≤ U (11d)
y
cab,k
+ y
bth,k
+ y
rb,k
+ y
em,k
+ y
bat,k
= 0 (11e)
y
m,k
+
1
2
q
m
u
2
m,k
+ f
m
u
m,k
+ e
m,k
≤ 0. (11f)
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
116
With T denoting temperature and the subscript sp in-
dicating a setpoint.
In the cost function, Eq. 11b corresponds to the
previously defined first-order dynamics for each sub-
system. The capital letters in states, inputs and distur-
bances (i.e., X,U and D) indicate the aggregated sub-
systems over the time horizon. Eqs. 11c and 11d de-
note constraints on upper and lower bounds for states
(X,X ) and inputs (U,U ). The power interconnection
at node A of Fig. 4 is captured in Eq. 11e. Finally, the
quadratic relationship of Eq. 9 is captured in Eq. 11f.
Notice that Eq. 11f has been relaxed to an inequality
to ensure convexity.
The weighing factors w
1
-w
4
are calibrated heuris-
tically, to obtain energy savings while keeping cabin
in an acceptable range for the passenger.
3 CASE STUDY
This section presents a motivational case study, where
the multi-layer EMS is applied.
3.1 Vehicle Fleet
A fleet of 11 BEVs is considered, to carry out dif-
ferent delivery routes, under multiple weather con-
ditions, and create a realistic operation for evaluat-
ing the multi-layer EMS. To do so, each one of the
vehicles drives one test case with a different route,
weather conditions or settings for eco-comfort. An
overview of the test cases is shown in Table 1.
The fleet of vehicles is assumed to be carrying out
simultaneously two types of last-mile delivery oper-
ations: post-delivery and food-delivery case. Both
last-mile deliveries are performed out in city environ-
ments. All deliveries are carried out during day time
while all charging is carried out during nighttime. The
post-delivery test case is assumed to be carried out
in 3 different routes across Belgium. Such deliver-
ies show frequent stops to deliver packages, and the
weather conditions vary around 5
◦
C. An example of
the prediction data is shown in Fig. 5. The low-speed
instances (i.e., when the speed is less than 10 km/h)
denote delivery locations.
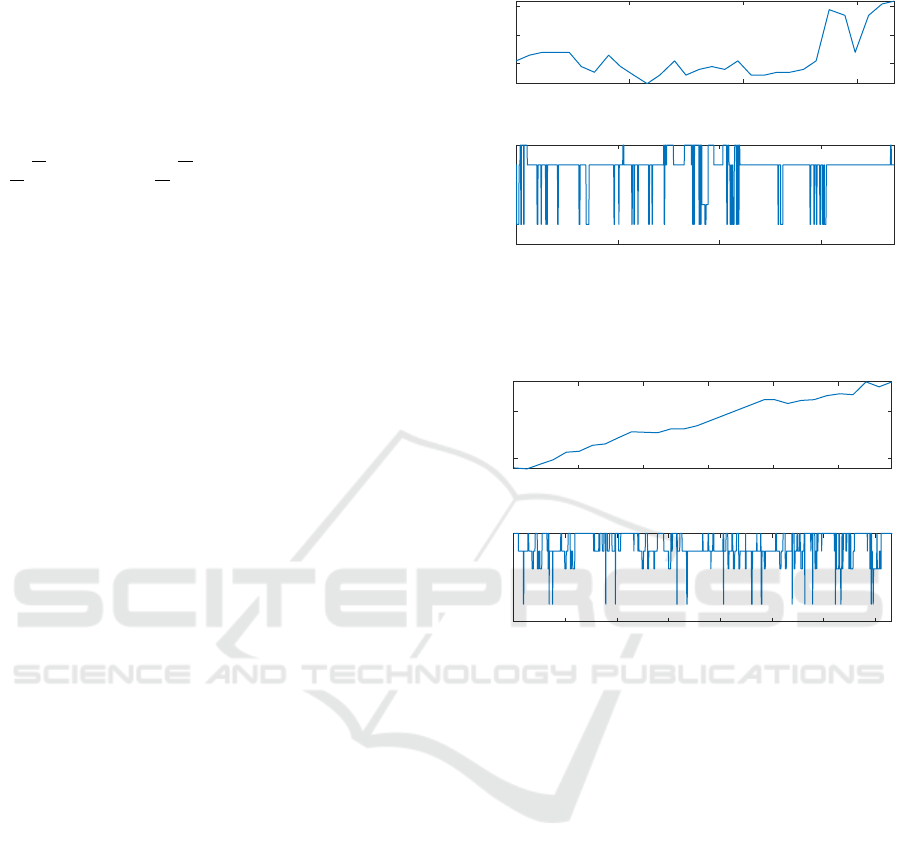
The food-delivery use case is executed in Thes-
saloniki, Greece. An example of the prediction data
on this use case is shown in Fig. 6. It can be seen
that the delivery of food requires fewer stops than
those of the post. Likewise, due to the location, the
weather conditions show relatively warmer tempera-
tures (above 30
◦
C) compared to post-delivery oper-
ation. These differences in weather conditions are
taken to show the difference between winter and sum-
09:00 09:10 09:20 09:30
Time Feb 10, 2022
5.8
5.9
6
°C
Temperature forecast
0 5 10 15
Distance [km]
0
50
[km/h]
Speed limit
Figure 5: Prediction data example of test case 12. Data
obtained using the APIs described in (Medina et al., 2023).
08:00 08:30 09:00 09:30 10:00 10:30
Time Jul 25, 2022
32
34
°C
Temperature forecast
0 10 20 30 40 50 60 70
Distance [km]
0
50
[km/h]
Speed limit
Figure 6: Prediction data example of test case 2. Data ob-
tained using the APIs described in (Medina et al., 2023).
mer operations. Note that last-mile delivery is spe-
cially relevant for the multi-layer EMS, as the re-
quired frequent stops in the city environment gives
ample opportunity for route and energy consumption
optimization. Other use cases with similar opportuni-
ties might also be of interest.
3.2 Vehicle Modelling
To evaluate the energy consumption for every test
case defined in the previous section, a vehicle model
and a powertrain model are created. The models
correspond to an N1-category BEV, which is com-
monly used for urban deliveries. Such models fol-
low forward-facing dynamics, as shown for exam-
ple in (Medina et al., 2020). The model parameters
are adapted for an N1-category vehicle. The vehicle
and powertrain models are operated by a driver model
which is a controller that follows a reference speed.
Such a reference is taken as the road speed limit or
the advised speed from eco-driving.
Multi-Layer Energy Management System for Cost Optimization of Battery Electric Vehicle Fleets
117
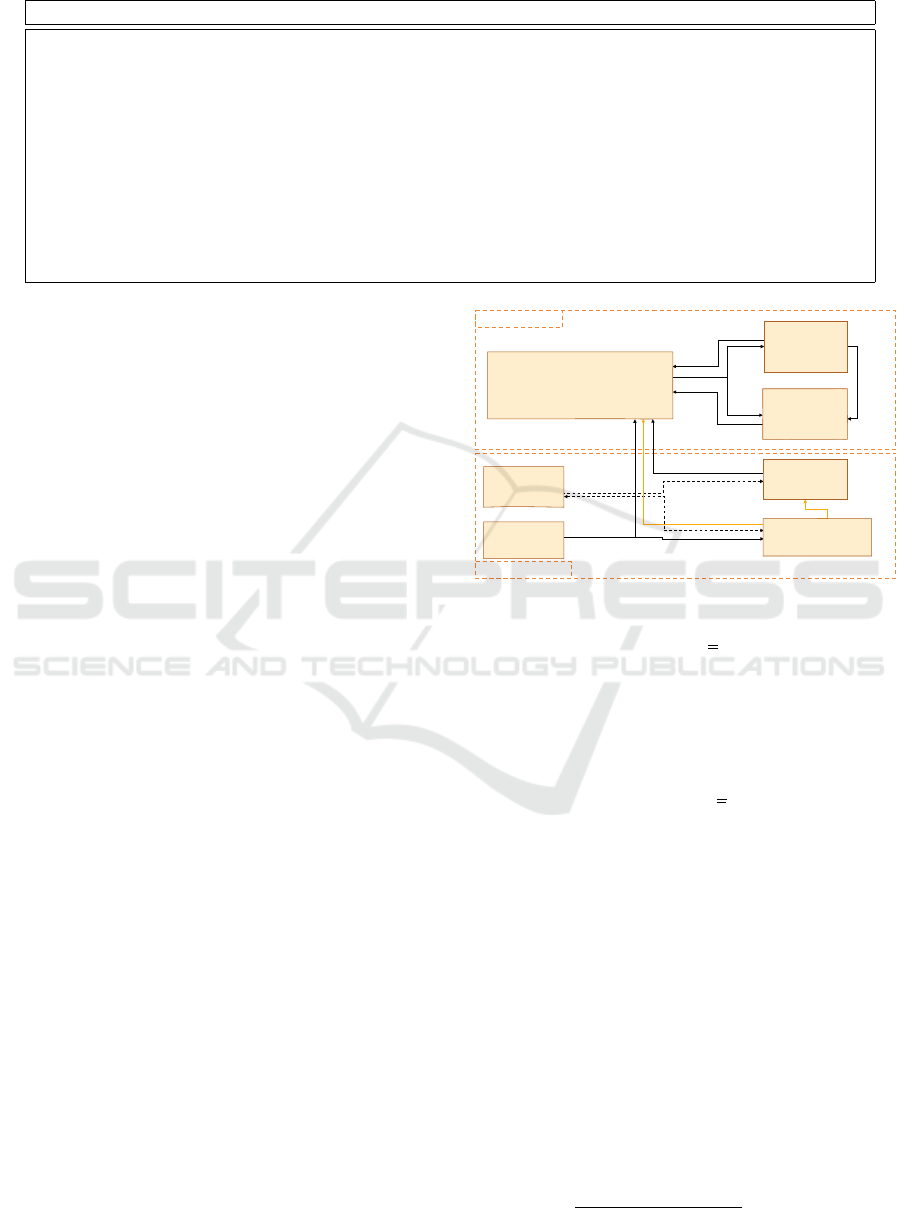
Table 1: Test cases description.
ID Location Goal
2 Greece Summer thermal savings, passenger comfort setting 1, benchmark cabin temp at 20°
3 Greece Summer thermal savings, passenger comfort setting 2,benchmark cabin temp at 20°
4 Greece Summer thermal savings, passenger comfort setting 3, benchmark cabin temp at 20°
5 Greece Summer thermal savings, passenger comfort setting 1, benchmark cabin temp at 22°
6 Greece Summer thermal savings, passenger comfort setting 2, benchmark cabin temp at 23°
7 Greece Summer thermal savings, passenger comfort setting 3, benchmark cabin temp at 23°
8 Belgium 1 Winter thermal savings, passenger comfort setting 1, benchmark cabin temp at 20°
9 Belgium 1 Winter thermal savings, passenger comfort setting 2, benchmark cabin temp at 20°
10 Belgium 1 Winter thermal savings, passenger comfort setting 3, benchmark cabin temp at 20°
11 Belgium 2 Eco-comfort validation, passenger comfort setting 2
12 Belgium 3 Eco-driving energy savings in urban environment
3.3 Simulation Environment
To quantify the multi-layer EMS beneftis, a simula-
tion environment is designed in Matlab (Medina et al.,
2023). The simulation environment splits the problem
into online and offline parts, as Fig. 7 shows.
The offline part runs the fleet-layer eco-functions
(eco-charging and eco-driving) to generate charge
planning and driving routes for the whole fleet. The
eco-functions take inputs from the logistic assign-
ment, such as delivery locations or required SoC at the
start of the day. Given the generated routes and charg-
ing schedule, APIs are used to predict traffic infor-
mation (e.g., the speed limit, road grade) and weather
forecast (e.g., temperature forecast) along the traveled
routes of the vehicle (see for example Fig. 6).
The online part runs a vehicle model while taking
as input the output of the offline part. For example,
the road grade affects the vehicle dynamics, and the
temperature forecasts the thermal losses. Likewise,
eco-driving and eco-comfort run in the online part.
For each time step in the simulation, the temperature
setpoints and speed advice are provided for the vehi-
cle models to follow. The resulting relevant metrics
are recorded (e.g., traveling time, energy consump-
tion) and used to evaluate the EMS performance.
3.4 Performance Metrics
The multi-layer EMS is compared using two relevant
metrics: energy consumption and total cost of oper-
ation. Energy consumption is recorded directly from
the battery and normalized for the number of traveled
kilometers along that route. Note that the on-board
eco-functions are designed to minimize this metric.
The total operational costs are considered as the
result of energy prices, labor, and battery degradation,
i.e.:
C = J
el
+ J
ca
+ J
cy
+ J
l
, (12)
Veh. Signals
Route
details
Weather
forecast Traffic
prediction
Route
Speed advise
Thermal
components
setpoints
Eco-charging
and charger
simulation
Base vehicle (models)
and driver model
Eco-driving
Eco-routing and
logistics information
Test case
selection
Weather and
traffic prediction
(APIs)
Power prediction profile
Eco-comfort
Online simulation
Offline simulation
Figure 7: Simulation environment overview.
where C is the total cost in [C], J
el
is the electricity
cost defined in Eq. 2, J
ca
and J
cy
are the calendar and
cyclic ageing of the battery, respectively, further de-
fined in Eqs. 3 and 4, and J
l
the labour cost given by
J
l
= T
t
C
d
, (13)
where T
t
is the total traveling time along the route and
C
d
is the driver hourly rate in [C/hour].
To compare the performance of each eco-function,
a benchmark simulation is run. For eco-routing the
benchmark corresponds to running the same logistic
assignment based on a commonly-used heuristic algo-
rithm that solves a Traveling Salesman Problem. For
eco-charging, the benchmark corresponds to applying
a greedy charging strategy (i.e., charge as soon as ar-
rival to the depot). For the on-board eco-functions,
the benchmark corresponds to running the routes pro-
vided by eco-routing, while not using the output of the
on-board eco-functions. That is, the driver follows the
speed limit, while the thermal systems follow a fixed
temperature setpoint.
To compare the improvements achieved by the
multi-layer EMS, the increase or decrease of cost is
calculated as
∆C =
C
benchmark
− C
EcoFun
C
benchmark
100 [%], (14)
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
118
where C
benchmark
and C
EcoFun
are the operational
costs [ C] related to the benchmark and eco-functions
scenarios, respectively, and ∆C is the percentage of
increase/decrease in total operational costs.
3.5 Multi-Layer EMS Parameters
To quantify the performance of the multi-layer EMS,
some parameters need to be assumed.
For eco-driving, the maximum vehicle accelera-
tion without the eco-function (i.e., in the benchmark
scenario) is taken as a = 0.66m/s
2
from (Purnot et al.,
2021). Therefore, maximum acceleration profile with
eco-driving is assumed as a = 0.37m/s
2
in test cases
2-11, and a = 0.25m/s
2
in test cases 11 and 12.
In eco-comfort, the weight factors w
1
-w
4
are cho-
sen to give several saving settings: setting 1 corre-
sponds to an “aggressive” profile (highest savings),
setting 2 to a “moderate” one (middle savings) and
setting 3 to a “smooth” one (lowest savings, maxi-
mum passenger comfort).
For eco-charging, the electricity price E
el
is 0.335 [C/kW h] from 23:00 to 07:00, and
0.385 [C/kW h] for the rest (Rath et al., 2023).
For the cost evaluation, the prices of labour rates
are assumed as
C
d
= 20
C
hour
. (15)
This price falls within the range of labour cost
in the European Union (European Comission, 2022).
Notice that driver costs has more weight than those of
electricity in the total cost calculation, as every saved
hour accounts for much more than every kW h saved.
4 SIMULATION RESULTS
This section presents the results of simulating the
multi-layer EMS with the case study of Section 3.
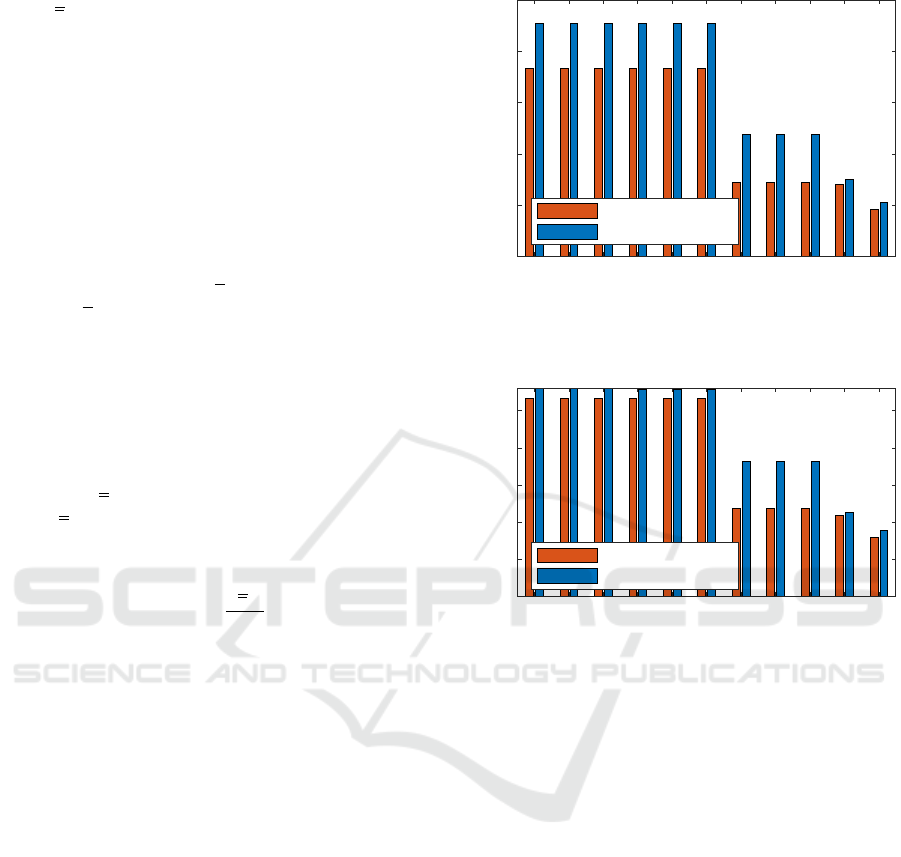
4.1 Fleet-Layer Savings of
Eco-Functions
Eco-routing is applied for case study of Section 3,
where the algorithm was able to compute a feasible
route for each one of the test cases. As discussed in
Section 2.2, the main goal of the algorithm is to re-
duce the total traveling distance. This is shown in
Fig. 8 where the optimized traveling distance is al-
ways lower than the benchmark. The improvement is
mostly visible in the test cases 8 to 10, as these re-
late to post-delivery cases which has a higher density
Eco-routing travelled distance
2 3 4 5 6 7 8 9 10 11 12
Trip ID
0
20
40
60
80
100
Travelled distance [km]
With eco-routing
Without eco-routing
Figure 8: Travelled distance comparison with eco-routing.
2 3 4 5 6 7 8 9 10 11 12
Trip ID
0
20
40
60
80
100
Travelled time [min]
With eco-routing
Without eco-routing
Eco-routing results overview
Figure 9: Travelled time comparison with eco-routing.
of deliveries compared to food-delivery. This creates
more optimization opportunities for the parcel order.
Using the simulation environment proposed in
Section 3.3, the proposed routes are simulated for
different test cases without enabling on-board eco-
functions. The resulting traveling times are shown in
Fig. 9. As expected, the traveling time is shorter due
to the shorter routes, which results in a reduction of
operational costs, as subsequent paragraphs show.
Using the energy requirements provided by eco-
routing, the eco-charging algorithm is run on the en-
tire fleet. The resulting charged energy is seen in
Fig. 10. Note that the charged energy while using
eco-charging, already includes the effects of using
eco-driving and eco-comfort. Therefore, using eco-
charging results in less energy needed to be charged
to each vehicle in the fleet.
Considering that the cost function of eco-charging
reduces the total charging-related costs, the benefits
of this algorithm are reflected in the economic sav-
ings. This is shown in Table 2. Due to the vari-
able electricity price, eco-charging tends to charge
the fleet when the energy price are lower. Likewise,
Multi-Layer Energy Management System for Cost Optimization of Battery Electric Vehicle Fleets
119
Eco-charging comparison
2 3 4 5 6 7 8 9 10 11 12
Trip ID
0
5
10
15
20
Charged energy [kWh]
Without eco-charging
With eco-charging
Figure 10: Charged energy comparison with eco-charging.
Table 2: Cost savings from eco-charging.
Benchmark [C] Eco-charging [C] [%]
ID J
el
J
cy
J
ca
J
el
J
cy
J
ca
∆C
2 5.7 2.2 2.2 3.25 0.96 1.48 43.9
3 5.7 2.2 2.0 3.31 0.98 1.39 43.1
4 5.7 2.2 2.2 3.34 1 1.46 42.9
5 5.6 2.1 2.0 3.25 0.96 1.4 43.1
6 5.6 2.1 2.2 3.31 0.98 1.46 42.6
7 5.6 2.1 2.0 3.34 1 1.38 42.1
8 2.5 0.6 2.0 1.34 0.25 1.82 34.7
9 2.5 0.6 1.8 1.44 0.28 1.68 32.9
10 2.5 0.6 1.9 1.47 0.29 1.73 32
11 2.1 0.5 1.7 1.61 0.33 1.52 21.5
12 1.4 0.2 1.6 1.09 0.19 1.52 18.4
using the insights of the aging model on the battery,
the algorithm achieves less deterioration in the battery
lifetime compared to the benchmark strategy. This
is more significant in terms of cyclic aging J
cy
, as it
seems to have a larger impact on the battery lifetime.
This reduction corresponds to a reduction of at least
20% of costs in all test cases.
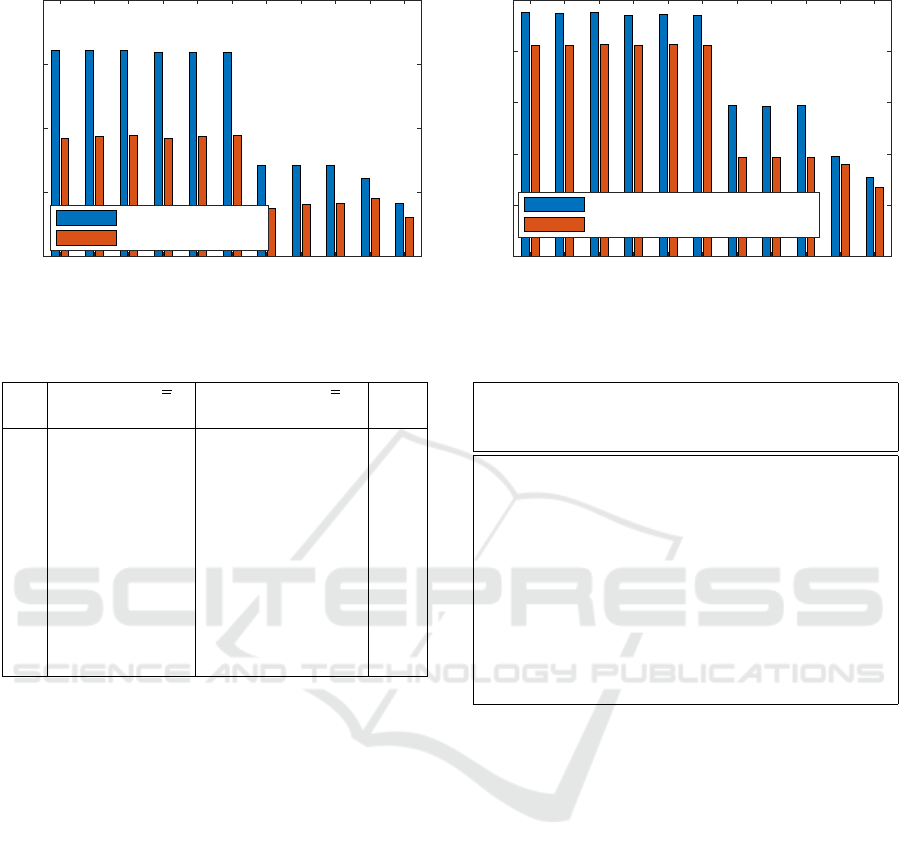
A total cost comparison of the cloud-based eco-
functions is shown in Fig. 11. The total operational
costs are always lower. Note that the electricity cost
J
el
is not taken into account in Fig. 11, as this is the
result of the combined effect of using the on-board
eco-functions and eco-charging. The electricity cost
is therefore going to be considered in the on-board
eco-functions, in the next subsection.
4.2 Vehicle-Layer Savings of
Eco-Functions
Using the vehicle model of Section 3.2, the routes
provided by eco-routing, and the traffic and weather
prediction information provided by the APIs de-
scribed in Fig. 7, the onboard eco-functions are tested
Cloud functions cost comparison
2 3 4 5 6 7 8 9 10 11 12
Trip ID
0
10
20
30
40
50
Cost [€]
Without eco-functions
With eco-charging and eco-routing
Figure 11: Cost comparison with fleet layer eco-functions.
Table 3: On-board energy consumption in [kW h/km].
ID No eco-
functions
With eco-
driving
With eco-
comfort and
eco-driving
2 0.137 0.135 0.126
3 0.137 0.135 0.128
4 0.137 0.135 0.129
5 0.133 0.131 0.126
6 0.133 0.131 0.128
7 0.133 0.131 0.129
8 0.149 0.145 0.13
9 0.149 0.145 0.14
10 0.149 0.145 0.143
11 0.188 0.165 0.163
12 0.197 0.169 0.166
on each one of the case studies of Table 1. As de-
scribed in Section 2, the onboard eco-functions min-
imize energy consumption while driving the vehicle.
An overview of the energy savings is shown in Ta-
ble 3. Note that in each one of the trips, the energy
consumption per kilometer is lower than while driv-
ing without using the eco-functions.
For the case of eco-comfort, although it produces
savings on all cases, the largest savings appears un-
der setting 1 (aggressive), which corresponds to test
cases 2, 5, and 8. The lowest savings corresponds to
setting 3 (smooth), which are cases 4, 7 and 10. Ta-
ble 3 also shows relatively larger savings during win-
ter than during summer. See for example the savings
of test case 2 (summer) and test case 8 (winter). These
larger savings are due the vehicle being equipped with
an air conditioning for cooling and an electric resis-
tance for heating. An air conditioning requires less
energy to create the same difference in temperature
than a resistor due to its Coefficient of Performance,
resulting in more saving possibilities during winter.
Note that eco-comfort does not affect traveling time
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
120
as it does not influence the driving dynamics.
Eco-driving provides the largest amount of sav-
ings in test cases 11 (12%) and 12 (14%), compared
to the rest of the test cases (on average 2.9%). This is
because in the test cases 11 and 12, the speed advice
is built with the extra saving setting for limiting the
acceleration, in contrast with the acceleration of the
other test cases. This test case shows the large poten-
tial of energy savings that eco-driving has.
However, the energy savings produced by eco-
driving come at the cost of extra traveling time, as
shown in Fig. 12, which increases the labor costs. For
example, test case 12 increases the traveling time by
25.9%, while the rest of the test cases increase it by
on average 8.2%. This creates a trade-off between the
savings on energy and the ones on labor: larger sav-
ings on energy result in added traveling time which
creates labor costs. The acceleration limit and maxi-
mum speed of eco-driving need to be carefully chosen
for each particular test case, to provide total opera-
tional savings.
2 3 4 5 6 7 8 9 10 11 12
Trip ID
0
20
40
60
80
100
120
Travelled time [min]
With eco-driving
Without eco-driving
Travelled time comparison
Figure 12: Travelled time comparison of eco-driving.
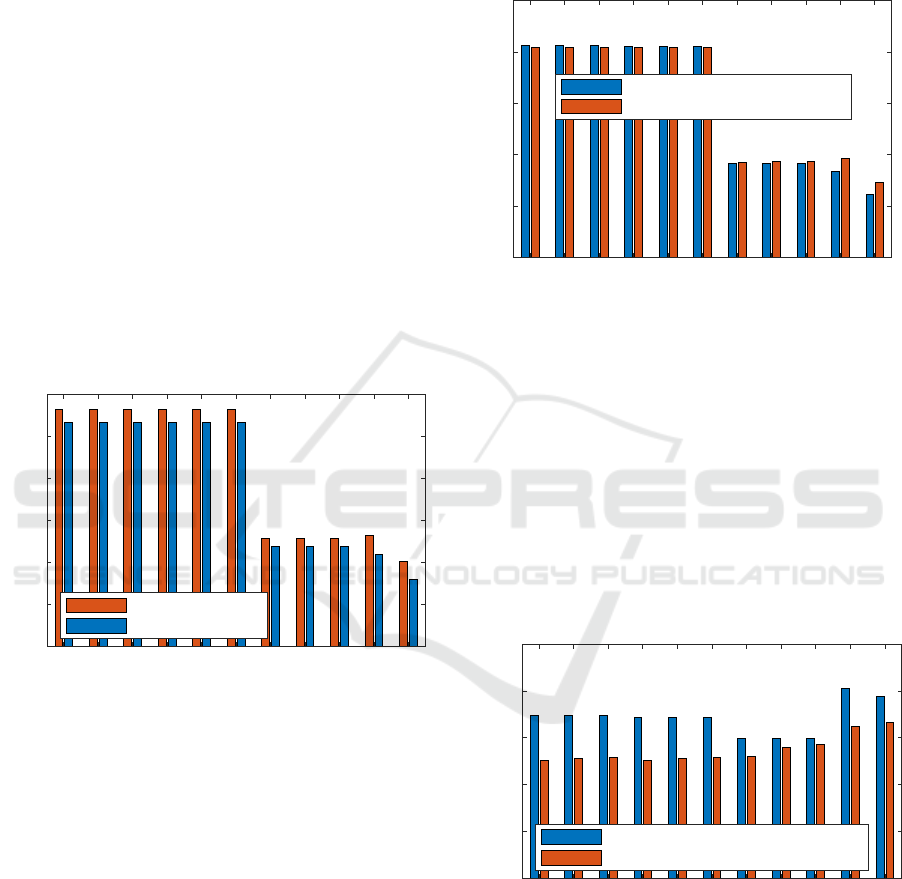
Using the rates presented in Section 3.5, the costs
presented in Fig. 13 are calculated. Note that despite
the combined energy savings of eco-comfort and eco-
driving, the total operational cost per test case is virtu-
ally the same in most test cases, except for test cases
11 and 12. This is because the extra traveling time
produced by eco-driving is canceling the effect of the
energy savings, due to the driver rates being more sig-
nificant than the electricity price. This is also partially
because the charging operation occurs with low elec-
tricity prices, which is a result of using eco-charging.
Notice that in test cases 11 and 12, the total cost of
the eco-functions remains higher than the benchmark,
because eco-driving produces significantly more trav-
eling time. Eco-driving could become cost-effective
if the electricity price is comparable to driver rates or
eco-driving is tuned to reduce traveling time, which
is likely to result in higher energy consumption. The
former is briefly shown in the next subsection. The
latter only requires the driver to accelerate as fast as
possible, which neglects the need for speed advice.
On-board functions cost comparison
2 3 4 5 6 7 8 9 10 11 12
Trip ID
0
10
20
30
40
50
Cost [€]
Without eco-functions
With eco-driving and eco-comfort
Figure 13: Cost comparison with onboard eco-functions.
4.3 Combined Savings Effect of the
Multi-Layer EMS
The energy consumption of the complete multi-layer
EMS is presented in Fig. 14. Note that in this case, the
benchmark corresponds to not using any eco-function
while driving the benchmark routes. Using the multi-
layer EMS reduces the energy consumption in all the
test cases. This is mostly due to the effect of the on-
board eco-functions.
2 3 4 5 6 7 8 9 10 11 12
0
0.05
0.1
0.15
0.2
0.25
Energy consumption [kWh/km]
Without ecos
With eco-routing, -driving and -comfort
Difference in energy savings
Figure 14: Energy consumption comparison with all eco-
functions.
The traveling time comparison is shown in Fig. 15.
As the figure shows, the traveling time is virtually the
same in test cases 2-7, significantly shorter in 8-10
and longer in 11-12. This traveling time is the result
of the shorter routes produced by eco-routing and the
longer traveling time produced by eco-driving. Note
that the total traveling time is only larger in test cases
Multi-Layer Energy Management System for Cost Optimization of Battery Electric Vehicle Fleets
121
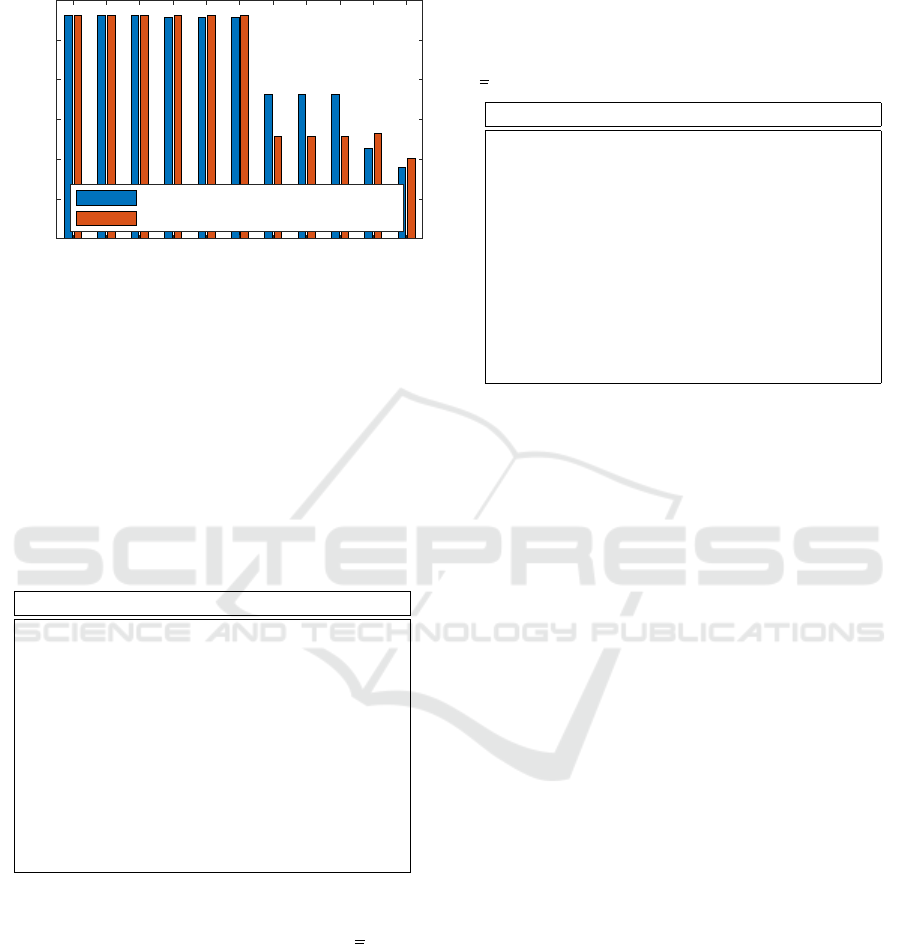
11 and 12, where eco-driving increases it.
2 3 4 5 6 7 8 9 10 11 12
Trip ID
0
20
40
60
80
100
120
Travelled time [min]
Without ecos
With eco-routing, -driving and -comfort
Difference in travelled time
Figure 15: Travelled time comparison with all eco-
functions.
Table 4 shows an overview of the resulting opera-
tional costs of using the multi-layer EMS. In most of
the cases, the total operational costs are lower using
the eco-functions, despite the added cost of the eco-
driving in the vehicle layer. Following the trend of
Fig. 15, the costs on test cases 11 and 12 are higher,
due to the additional traveling induced by eco-driving.
Table 4: Cost improvement based on Eq. 14 and the costs
of Section 3.5. Positive values indicate savings.
ID On board only Fleet only Combined
2 1.04 9.35 5.23
3 0.89 9.15 5.04
4 0.82 9.3 5.09
5 0.87 8.44 4.67
6 0.72 8.62 4.69
7 0.65 8.39 4.53
8 -0.63 33.48 19.66
9 -1.18 33.47 19.38
10 -1.34 33.45 19.32
11 -14.72 5.28 -4.55
12 -19.64 10.6 -3.53
To show more significant savings of the multi-
layer EMS, the operational costs are re-calculated
using a hypothetical labor cost of C
d
= 2[C/hour],
while the electricity costs are kept the same. The re-
sults are summarized in Table 5. With this reduced
rate, the battery degradation and electricity price be-
come more significant in the cost calculations. For
example in the cloud functions costs, battery degra-
dation becomes the dominant factor with the reduced
hourly rate, making the relative savings higher than
with a normal hourly rate. Likewise, in the on-board
functions costs, electricity price becomes the domi-
nant factor, yielding to savings in all test cases. Con-
sequently, the multi-layer EMS shows costs and en-
ergy savings in all test cases. This hypothetical rate
shows that the multi-layer EMS can be cost-effective,
depending on the ratio of labor and electricity prices.
Table 5: Cost improvement based on Eq. 14 and C
d
= 2
[C/hour]. Positive values indicate savings.
ID On board only Fleet only Combined
2 24.29 26.78 25.46
3 23.64 26.1 24.78
4 23.32 26.53 24.83
5 23.72 25.66 24.62
6 23.06 26.23 24.55
7 22.74 25.41 23.98
8 25.42 28.8 27.3
9 22.98 28.57 26.05
10 22.25 28.52 25.71
11 7.08 12.01 9.59
12 4.39 11.55 8.34
5 CONCLUSIONS
This paper presented the operational cost and energy
savings of a multi-layer Energy Management System
(EMS) for a fleet of Battery-Electric Vehicle (BEV),
used in distribution logistics.
The EMS is composed of fleet-layer (eco-routing
and eco-charging) and vehicle-layer algorithms (eco-
driving and eco-comfort). Eco-routing finds the route
for the vehicles in the fleet, which minimizes the to-
tal traveling distance. Eco-charging finds a charging
schedule, which minimizes battery degradation and
electricity cost. Eco-driving provides each driver with
a speed advise, that minimizes the energy consump-
tion of the vehicle powertrain. Eco-comfort mini-
mizes the energy consumption of the vehicle ther-
mal systems, while considering driving comfort. The
multi-layer EMS is tested in a case study, which sim-
ulates information about the operation of a fleet of
BEVs using real traffic and weather information.
Simulation results show that on a fleet level, eco-
routing reduces the traveling distance of the whole
fleet when compared to a baseline algorithm. This in
turn reduces the labour related costs due to the faster
delivery times. Eco-charging reduces the charging-
related costs because the charging operation mostly
occurs when the electricity tariffs are low and be-
cause the reduced battery degradation. Both fleet-
level eco-functions add their individual savings to the
total fleet-level savings.
Results also show that eco-comfort reduces the en-
ergy consumption of the thermal systems on the ve-
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
122

hicle, depending on several factors, such as ambient
temperature and algorithm settings. All energy sav-
ings of eco-comfort result in savings on operational
costs, with a possible reduction in thermal comfort.
Eco-driving also reduces the energy consumption of
the vehicle powertrain, depending on the maximum
acceleration set in the algorithm and the maximum
speed. However, such a reduction comes with an
additional traveling time, which increases the labor
costs. The settings of eco-driving needs to be care-
fully chosen depending on the electricity price and the
labor costs, to provide operational savings.
Lastly, results also show that using all the eco-
functions in the multi-layer EMS results in a reduc-
tion in energy consumption in the entire fleet. How-
ever, the operational cost savings related to energy
consumption are slightly reduced by the fact that eco-
charging charges the fleet preferably when the elec-
tricity prices are lower. Likewise, the traveling time of
each vehicle is increased by the effect of eco-driving
and decreased by the effect of eco-routing. The ben-
efits of these eco-functions can cancel each other if
eco-driving is not properly tuned, leading to higher
labour costs. Therefore, an additional simulation is
run to show a hypothetical case in which the benefits
of both eco-driving and eco-routing can be added to
each other, due to the costs of energy-related savings
being comparable to the labor-related savings.
ACKNOWLEDGEMENTS
This research has received funding from the European
Union’s Horizon 2020 research and innovation pro-
gramme under grant No 101006943, title of URBAN-
IZED.
REFERENCES
Ahmadi, P. (2019). Environmental impacts and behav-
ioral drivers of deep decarbonization for transporta-
tion through electric vehicles. Journal of Cleaner Pro-
duction, 225:1209–1219.
Ajanovi
´
c, Z. et al. (2018). A novel model-based heuris-
tic for energy-optimal motion planning for automated
driving. 15th IFAC Symposium CTS, 51(9):255–260.
Anosike, A. et al. (2023). Exploring the challenges of elec-
tric vehicle adoption in final mile parcel delivery. In-
ternational Journal of Logistics Research and Appli-
cations, 26(6):683–707.
Cataldo-D
´
ıaz, C. et al. (2024). Mathematical models for the
electric vehicle routing problem with time windows
considering different aspects of the charging process.
Operational Research, 24(1):1.
Donateo, T. et al. (2014). A method to estimate the environ-
mental impact of an electric city car during six months
of testing in an italian city. Journal of Power Sources,
270:487–498.
European Comission (2022). Hourly labour costs
ranged from C8 to C51 in the EU. https:
//ec.europa.eu/eurostat/web/products-eurostat-news/
w/DDN-20230330-3. Accessed:01-02-2024.
Ewert, A. et al. (2020). Small and light electric vehicles:
An analysis of feasible transport impacts and oppor-
tunities for improved urban land use. Sustainability,
12(19).
Gao, Z. et al. (2023). Electric vehicle lifecycle carbon
emission reduction: A review. Carbon Neutralization,
2(5):528–550.
Geerts, D. et al. (2022). Optimal charging of electric ve-
hicle fleets: Minimizing battery degradation and grid
congestion using battery storage systems. In Second
International Conference SMART, pages 1–11. IEEE.
Han, J., Vahidi, A., and Sciarretta, A. (2019). Fundamen-
tals of energy efficient driving for combustion engine
and electric vehicles: An optimal control perspective.
Automatica, 103:558–572.
Kallehauge, B. et al. (2005). Vehicle routing problem with
time windows. Springer.
Kwak, K. H. et al. (2023). Thermal comfort-conscious
eco-climate control for electric vehicles using model
predictive control. Control Engineering Practice,
136:105527.
Lacombe, R. (2023). Distributed optimization for the opti-
mal control of electric vehicle fleets.
Lera-Romero, G. et al. (2024). A branch-cut-and-price al-
gorithm for the time-dependent electric vehicle rout-
ing problem with time windows. European Journal of
Operational Research, 312(3):978–995.
Medina, R. et al. (2020). Multi-layer predictive energy man-
agement system for battery electric vehicles. IFAC-
PapersOnLine, 53(2):14167–14172.
Medina, R. et al. (2023). Urbanized D4.4: Optimised self-
adaptive, multi-layer EMS design and virtual valida-
tion fleet management algorithm. Technical report,
European Union Horizon 2020, research and innova-
tion programme.
Naeem, H. M. Y. (2023). Eco-driving Control of Electric
Vehicle with Realistic Constraints. PhD thesis, Capital
University.
Purnot, T. et al. (2021). Urbanized D2.1: Mission profiles,
KPIs, assessment plan, List of vehicle requirements,
design specifications and shared interfaces. Technical
report, European Union Horizon 2020, research and
innovation programme.
Rath, S. et al. (2023). Real-time optimal charging strat-
egy for a fleet of electric vehicles minimizing battery
degradation. In SEFET, pages 1–8. IEEE.
Sendek-Matysiak, E. et al. (2022). Total cost of ownership
of light commercial electrical vehicles in city logis-
tics. Energies, 15(22).
Siragusa, C. et al. (2022). Electric vehicles performing last-
mile delivery in B2C e-commerce: An economic and
Multi-Layer Energy Management System for Cost Optimization of Battery Electric Vehicle Fleets
123

environmental assessment. International Journal of
Sustainable Transportation, 16(1):22–33.
Smith, W. J. (2010). Can EV (Electric Vehicles) address
Ireland’s CO2 emissions from transport? Energy,
35(12):4514–4521.
Zhang, L. et al. (2021). Optimal electric bus fleet scheduling
considering battery degradation and non-linear charg-
ing profile. Transportation Research Part E: Logistics
and Transportation Review, 154:102445.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
124
