
Lifelong Dynamic Timed A* (LTA*) for Fastest Path Retrieval in
Congested Road Networks Using Predicted Speeds
Kartikey Sondhi, Poulami Dalapati
a
and Saurabh Kumar
b
Department of Computer Science and Engineering, The LNM Institute of Information Technology Jaipur, India
Keywords:
Intelligent Transportation Systems, Traffic Congestion Management, Traffic Modelling and Simulation,
Dynamic A*.
Abstract:
Efficient transportation systems are crucial for the ever-growing smart cities. With the increasing urbanization
and growth in vehicular traffic, congestion has become a significant challenge. This research paper addresses
the critical issue of identifying the fastest, least congested path in road transport networks, aiming to enhance
overall travel efficiency and reduce the negative impact of traffic congestion. The study employs an improved
version of the Lifelong Planning A* (LPA*) that helps find the fastest route between two points in dynamic
changing environments. The proposed methodology is called the Lifelong Dynamic Timed A
∗
(LTA
∗
) algo-
rithm with an optimal bound weight factor integrated with it to make the search more guided and efficiently
predict optimized traffic paths to provide real-time recommendations. To validate the effectiveness of the de-
veloped algorithm, extensive simulations and case studies are conducted on a small area in Washington as well
as on Grid Worlds. The experimental results show that LTA*, within accurate weight bounds, always managed
to find the fastest path, and in some cases, the time taken was close to half of that produced by A*.
1 INTRODUCTION
Heuristic based searches have been widely used to
compute the shortest paths in graphs, which extends
is usage to grid world planning problems, mazes and
even road networks. To find solutions to various prob-
lems algorithms are frequently used to add robustness
to the the search. The search algorithms in the lit-
erature often give results with different costs, where
costs are often measured in time to generate first so-
lutions, deviation from ideal outcomes, computational
units exhausted as well as total nodes expanded to find
these solutions.
The A* algorithm being a special case of the
Breadth First Search is often deployed in such prob-
lems, first proposed in (Hart et al., 1968), utilizes
the heuristic to perform a guided search as compared
to the unguided alternative being the Djikstra’s algo-
rithm, which also is a special case of the BFS. The
conditions that the these algorithms will find the opti-
mal solution if any, are that, firstly the heuristic func-
tion is admissible, meaning it never over-estimates the
cost to the goal and the secondly, the edges within
a
https://orcid.org/0000-0003-0539-3029
b
https://orcid.org/0000-0002-1786-1056
the graph are non negative. In 1970, Pohl proposed
the inclusion of a weighted constant w, when mul-
tiplied to the heuristic in A* would speed up search
by compromising with the optimal solution and re-
ceiving a sub-optimal one(Pohl, 1970), when w was
greater than 1. This sub-optimal nature of the solu-
tion is bounded by the weight w, in cases where h
is admissible , meaning the solution produced is to be
not more than w times the optimal solution(Likhachev
et al., 2005). This inflated heuristic search paved
way for a new class of searching algorithms called
the Anytime Algorithms. In these algorithms, a in-
flated value of w is chosen, that allows the algorithm
to generate a first sub-optimal solution very quickly,
and refines over its search by iterating over smaller
values of w to produce subsequent better solutions as
the search progresses. The way these first values of w
are chosen and the magnitude of their decrements is
something that varies greatly from one problem to the
other, but someone interested in reading can refer to
(Richter et al., 2010)(Stern et al., 2014)(Van Den Berg
et al., 2011). When speaking about urban transporta-
tion systems the actions taken now, greatly reflect the
next possible choices we can possibly make. For these
very reasons we ponder through the paper the reasons
and lengths to which the weighted constant has been
Sondhi, K., Dalapati, P. and Kumar, S.
Lifelong Dynamic Timed A* (LTA*) for Fastest Path Retrieval in Congested Road Networks Using Predicted Speeds.
DOI: 10.5220/0012629900003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 293-298
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
293

applied.
These anytime algorithms designed are great for
generating the quickest first solutions but often fail
to perform well in dynamic environments like trans-
portation systems and robot path finding, where the
edge costs are prone to change. The D* (Dynamic
A*) (Likhachev et al., 2005), D* Lite and LPA* (Life-
long Planning A*) (Koenig et al., 2004) are dynamic
versions that are adapted to the changing edge cost
that may occur in the environment. They compute
a first shortest path and then based on the f values
of remaining states, calculates alternate optimal paths
when current optimal trajectories get obstructed. The
difference between the D* Lite and LPA* algorithms
is the cost associated with computing the solution in
real time, with the D* Lite being the optimised and re-
fined version, with significantly lesser push and pops
from the priority queue and the restarting nature of
the LPA*.
To extend the knowledge of such algorithms into
Intelligent Transportation System (ITS), we must ad-
dress that there are critical challenges to ITS like fluc-
tuations in road mobility volumes, sensitive to irregu-
lar patterns and real time traffic control, which, due to
the highly stochastic nature of congestion on road net-
works, creates planning problems. Path finding in the
case of vehicles not only requires shortest routes to
the destination, but a path that avoids excessive con-
gestion, includes better quality roads and exhibit bet-
ter or even the fastest travel times possible. To tackle
these spatio-temporal factors, congestion data needs
to be captured from road networks and processed.
For this, in (Ma et al., 2015), Ma et al propose a
Long Short Term Memory Neural Network that evalu-
ates traffic data collected through microwave sensors,
that produced speed predictions better than Support
Vector Machines and Non-Linear Auto-Regressive
Neural Networks, with the model proposed deliver-
ing speed prediction with less than 4% Mean Ab-
solute Percentage Error(MAPE). Another such state
of the art method was proposed by Zhang et al in
2020 in (Zhang et al., 2020) where the traffic was
predicted using a Structured Learning Convolutional
Neural Networks. Reflecting upon the possibilities of
NN’s to assist in the prediction problem of this highly
dynamic nature of traffic on road networks, a novel
Lifelong Planning Timed A* (LTA*) is proposed, that
shall produce fastest paths in real time, even in cases
of accidents or abrupt road closures.
The remaining paper is organized as follows: Sec-
tion 2 proposes the novel LTA* with the mathematical
model and the algorithmic approach. The theoretical
analysis with challenges and the experimental results
and comparative analysis have been discussed in Sec-
tion 3. Finally Section 4 concludes the proposed re-
search work and discusses the future scope.
2 METHODOLOGY
2.1 Problem Statement
The goal of this paper is to propose and develop an al-
gorithm that suggests the fastest route to be taken be-
tween two points on a real world road network map.
Our proposed algorithm encapsulates the challenges
faced in real road networks, like the unreliability of
congestion that may be present on roads, and it mod-
ifies itself in times of uncertain traffic conditions in
real time.
The problem involves receiving a map of city, that
can be represented as a graph with the vertices repre-
sent intersections and edges represent the roads con-
necting them. If a person wants to travel from one in-
tersection to the other, the algorithms returns the path,
which takes the shortest time to travel. The algorithms
uses historical speed data and predictive models, de-
veloped for certain cities using sensors and machine
learning in real time to retrieve the fastest path.
2.2 Proposed LTA*
In this section we will introduce the working of our
LTA* algorithm, which tackles the problem of the
stochastic nature of congestion that might be present
on road networks, then deriving a shortest time con-
suming path from within such a network with great
accuracy. Doing so requires
• A time dependent value for each edge, containing
values for every 10 minute time interval or real
time generated values. These values need to be
updated using the sensors in the environment or
through online maps that show road closures.
• A hash map is used that stores the speed data for
the different times of the day, and is only up-
dated in cases of significant difference between
predicted values or sudden road closures.
• Further the LTA* algorithm proposed is inspired
from the Lifelong Planning Problem in (Koenig
et al., 2004). The given algorithm uses an ad-
ditional variable for each node and that is it’s t
also called the t-score, a parallel drawn from the
g score and f score, that stores the time at which
a certain node can be reached at.
• The g also called g score, for a node u, is updated
based on the least time it takes to get to u from
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
294

its predecessors. Intuitively doing so would make
the dimensions of this physical quantity to that of
T
1
. To change the dimensions back to those of
distance, we multiply the MaxSpeed of the entire
network so that we are logically diving the dis-
tance between two intersections by a quantity be-
tween (0, 1] and then updating the g.
Assuming we have to update the g value for some
state s which has a predecessor s
′
, so in equation 1.
(
g(s
′
;u
′
) = g(s) +
c(s,s
′
)∗MaxSpeed
Speed(s
′
,s,t(s
′
))
f (s
′
) = g(s
′
) + w ∗ h(s
′
)
(1)
Algorithm 1: LTA
∗
Main().
procedure Main( )
Initialize
Repeat ▷ forever
location ← getLocation()
currTime ← getTime()
ComputeFastestPath()
wait for change in predicted values
for all updated edges from (u,v)
UpdateNode(v)
end procedure
The working of the algorithm is similar to the op-
timised LPA* proposed in (Koenig et al., 2004), but
the overview of the algorithm is as follows:
• The edge costs are updated as per the normalised
distance from t values of the predecessors instead
of the directly added edge costs.
• The lifelong planning approach utilizes the con-
cept of restarting searches from current node, so
whenever there is an update to a node’s intersec-
tion’s t and g value, all nodes with them as pre-
decessors get updated, causing a chain of changes
within the values.
• The core of the algorithm lies in the speed func-
tion that calculates the speed for an intersection
from it’s t value. So instead of using the cur-
rent congestion information for a an intersection,
which may be occupied by the vehicle 1 hour
later, using the estimate t value at that time makes
sense, as it reduces computation to update the
speeds dynamically. The only time there are any
change in the predicted speeds and t values, are
when there are unexpected road closures or acci-
dents. We assume that our vehicle will reach our
intersection at the time that is equivalent to the t
value.
Algorithm 2: LTA
∗
Dependencies.
procedure CalculateKey(s)
return [w*h(s) + min (g(s), rhs g(s)),
min (g(s), rhs g(s))]
end procedure
procedure Initialize( )
U=φ
for all s ∈ S, rhs g(s), g(s), rhs t(s) ← ∞
rhs g(start) , rhs t(start) ← 0
U.insert(start, [h(start), 0]
end procedure
procedure UpdateNode(v)
if (v ̸= start)
rhs t(v) = min
s
′
∈pred(v)
(
c(s
′
,v)
speed(v,s
′
,T (s
′
))
)+
T (s
′
) ▷ T Value Updation
rhs g(v) = min
s
′
∈pred(v)
(
c(s
′
,v)
speed(v,s
′
,T (s
′
))
)+
g(s
′
) ▷ G Value Updation
end
if (u ∈ v)
U.remove(u)
end
if (g(u) ̸= rhs(u)
u.insert(u, calculateKey(u))
end
end procedure
procedure ComputeShortestPath( )
while (U.TopKey() < CalculateKey (S goal)
or rhs g(S goal) ̸= g(S goal)
or rhs t(S goal) ̸= t(S goal))
▷ Termination Checking
u = U.pop()
if (g(u) > rhs(u))
g(u) ← rhs g(u)
t(u) ← rhs t(u)
for all s ∈ succ(u), updateNode(s)
end
else
g(u) ← ∞
for all s ∈ succ(u) ∪ u, updateNode(s)
end
end
end procedure
Lifelong Dynamic Timed A* (LTA*) for Fastest Path Retrieval in Congested Road Networks Using Predicted Speeds
295
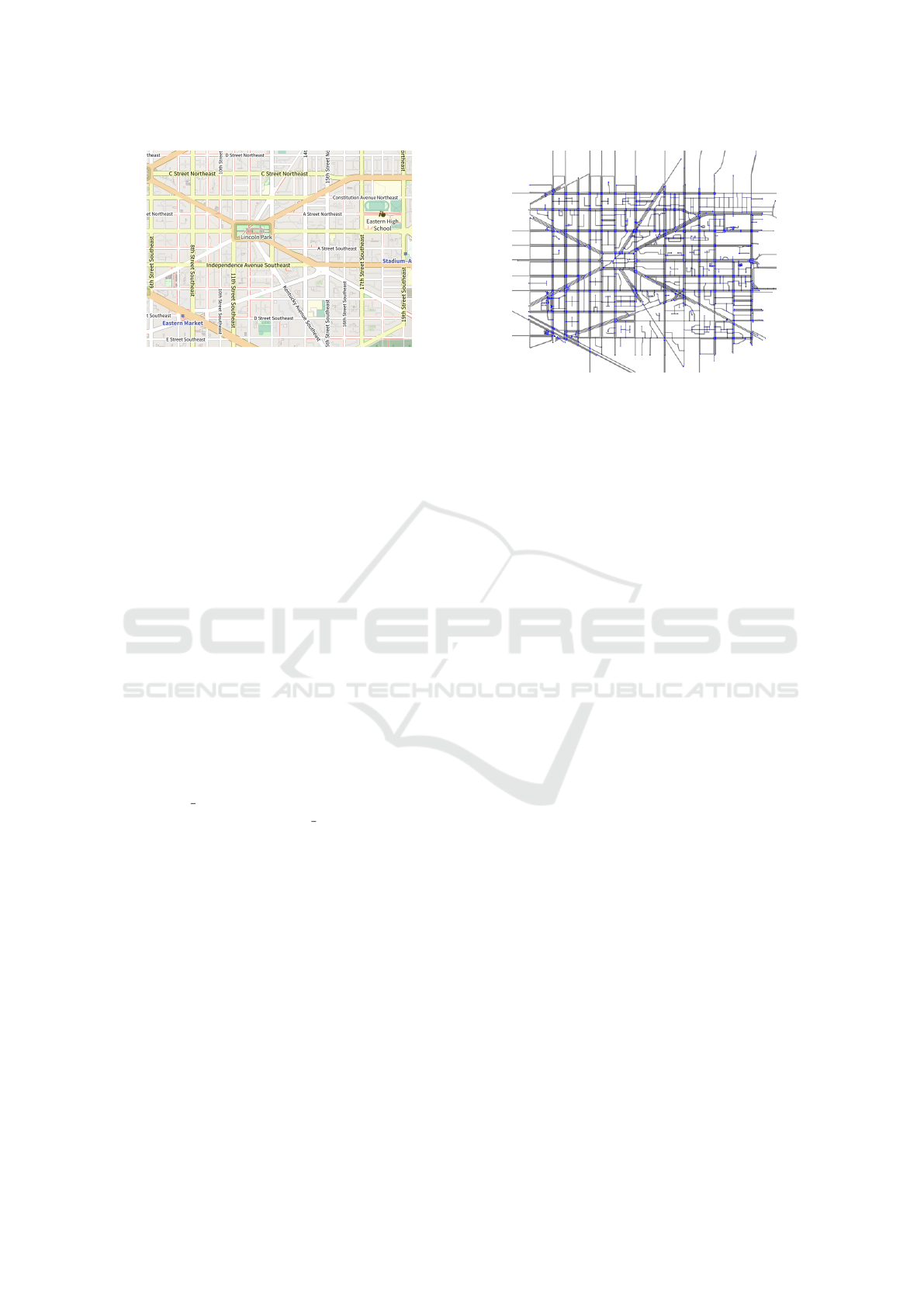
Figure 1: Road transport network of Washington City area.
3 RESULT AND ANALYSIS
3.1 Theoretical Analysis
3.1.1 Challenges
Incremental search algorithms like the one proposed
are best suited for environment with changing fea-
tures which in our case is the congestion present on
the road. The algorithm proposed utilises the time de-
rived values of speeds for different edges which are
garnered through the t values. The algorithm cur-
rently runs on Restarting the A* search which re-
quires the re-computation of edges for their g and
t values whenever there is a change. Certain ap-
proaches from within the literature would seem log-
ical to be applied in such cases to boost the search:
1. Bidirectional search: The following LTA* ap-
proach cannot be applied using a bidirectional A*
because the core of the LTA* algorithm lies in us-
ing the time based speed of an edge to estimate a
node’s g cost at a given time, and it is practically
impossible to estimate the t cost of node’s in the
opposite direction in the same order as they are
from the start to finish.
2. D* Lite: Following the intuition from the bidirec-
tional search as well, we can see that if the node
encounters an unexpected blockage, which may
occur in traffic systems, the recovery/repair part
of the D* Lite from that time on can compute the
shortest path from the goal to current position of
the vehicle, as it designed to do, but it may en-
counter issues in computing the fastest path, due
to failing to collect accurate time based speeds for
each edge due to the t values getting changed due
to changes in g values.
Figure 2: Graphical grid model of Washington City area.
3.2 Observation and Analysis
The proposed algorithm is implemented using a 500×
500, 1000 × 1000, as shown in Table 1 Grid World
systems with constant lengths equal to 200 meters,
with 5 − 10% nodes and corresponding edges ran-
domly removed from the grid to mimic a real world
like city road map. The algorithm is also tested on
an urban area of Washington, US, depicted in Figure
1 and Figure 2 to validate the efficiency of the pro-
posed methods. To calculate the distance between the
nodes on the map, the longitudinal and latitudinal co-
ordinates are used to compute the distance.
The analysis of time base values for the differ-
ent times of the days has been conducted using ran-
dom integer values for speeds generated between the
range of 2m/s or 7.2km/hr, and 15m/s or 54km/hr and
dynamically updated for an edge for 10 minute in-
tervals within a day. The observations in all three
examples taken (see Table 1) show that the shortest
route every time isn’t the fastest route, not that it isn’t
possible, which in contradiction with the popular be-
lief and trend present in the literature where all algo-
rithms focus on shortest routes. The numbers show
how effective this algorithm can be in certain situa-
tions where shortest paths are extremely congested,
and how choosing alternative paths as shown in ex-
amples can even reduce travel times by half.
Numerous observations were conducted, both on
the grid world example as well as on the map of Wash-
ington, and it was found out that on an average, even
though using a weight equal to w equal to 1.6 was
used to overestimate the heuristic function, it rarely
compromised with the optimal solution. The observa-
tion were run for various simulations and it was found
that the number of nodes traversed decreased by al-
most a factor of 10 when employing a weight of 1.6.
These results are recorded in the graphs, depicted in
Figure 3, Figure 4, Figure 5, and Figure 6. This value
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
296
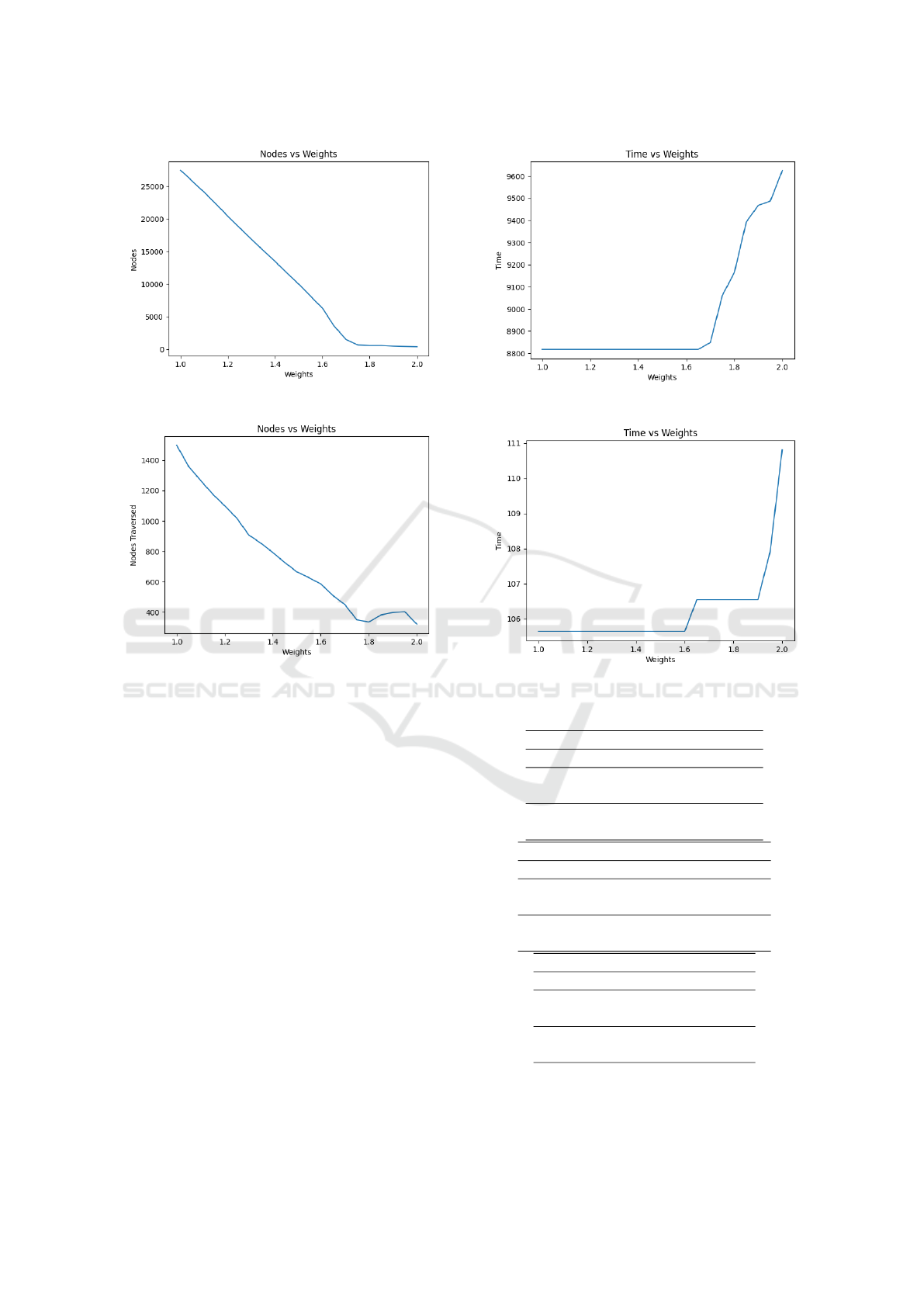
Figure 3: Nodes Searched in the Grid Vs Weight for LTA*.
Figure 4: Nodes Searched on the Map Vs Weight for LTA*.
of the weight, might suit some grid-worlds or maps
but isn’t in any way a generalization to all kinds of
maps.
4 CONCLUSION
This research addresses a critical aspect of urban
transportation by focusing on the identification of the
fastest least congested path in road transport networks
using a novel timed weighted A
∗
algorithm. Through
the modelling and implementation of LTA* that in-
corporates real-time traffic data and dynamic vari-
ables, this research work demonstrates a significant
improvement in identifying optimal routes. The ex-
tensive simulations and case studies conducted on ur-
ban road networks provides valuable insights into the
adaptability and robustness of the proposed algorithm
to sudden road closures. The positive outcomes ob-
served in 1000x1000 Grid Worlds demonstrates the
algorithms potential to address the complex and dy-
namic nature of urban traffic, making it a practical
tool for urban planners, transportation authorities, and
Figure 5: Fastest Time in the Grid Vs Weight for LTA*.
Figure 6: Fastest Time on the Map Vs Weight for LTA*.
Table 1: LTA* Observations on different test cases.
GridWorld: 500x500
Observation Distance Time
A* 112.2Km 18563 s
LTA* 114.6Km 10484 s
A* 65.2Km 11186 s
LTA* 65.6Km 5789 s
GridWorld: 1000x1000
Observation Distance Time
A* 143Km 23684 s
LTA* 144.6Km 13190 s
A* 222.6 Km 36723.9 s
LTA* 225.8 Km 20695.3 s
Washington Map
Observation Distance Time
A* 1.788Km 275 s
LTA* 2.233Km 195 s
A* 1.554Km 221 s
LTA* 1.646Km 152 s
commuters seeking more efficient travel routes. This,
in turn, aligns with the broader goal of achieving
Lifelong Dynamic Timed A* (LTA*) for Fastest Path Retrieval in Congested Road Networks Using Predicted Speeds
297

sustainable urban mobility and improving the overall
quality of modern transportation systems.
The current LTA* algorithm works great in dy-
namic environments without actually restarting the
search throughout the search space but for only the
successor intersections where the edge speeds had
been predicted wrongly. To further speed up the
search we can employ algorithms like ANA* to pro-
duce even faster first outputs search results.
REFERENCES
Hart, P. E., Nilsson, N. J., and Raphael, B. (1968). A for-
mal basis for the heuristic determination of minimum
cost paths. IEEE transactions on Systems Science and
Cybernetics, 4(2):100–107.
Koenig, S., Likhachev, M., and Furcy, D. (2004). Lifelong
planning a star. Artificial Intelligence, 155(1-2):93–
146.
Likhachev, M., Ferguson, D. I., Gordon, G. J., Stentz, A.,
and Thrun, S. (2005). Anytime dynamic a*: An
anytime, replanning algorithm. In ICAPS, volume 5,
pages 262–271.
Ma, X., Tao, Z., Wang, Y., Yu, H., and Wang, Y. (2015).
Long short-term memory neural network for traffic
speed prediction using remote microwave sensor data.
Transportation Research Part C: Emerging Technolo-
gies, 54:187–197.
Pohl, I. (1970). Heuristic search viewed as path finding in a
graph. Artificial intelligence, 1(3-4):193–204.
Richter, S., Thayer, J., and Ruml, W. (2010). The joy of
forgetting: Faster anytime search via restarting. In
Proceedings of the International Conference on Au-
tomated Planning and Scheduling, volume 20, pages
137–144.
Stern, R., Felner, A., Van Den Berg, J., Puzis, R., Shah, R.,
and Goldberg, K. (2014). Potential-based bounded-
cost search and anytime non-parametric a
*
. Artificial
Intelligence, 214:1–25.
Van Den Berg, J., Shah, R., Huang, A., and Goldberg, K.
(2011). Anytime nonparametric a. In Proceedings
of the AAAI conference on artificial intelligence, vol-
ume 25, pages 105–111.
Zhang, Q., Chang, J., Meng, G., Xiang, S., and Pan, C.
(2020). Spatio-temporal graph structure learning for
traffic forecasting. In Proceedings of the AAAI con-
ference on artificial intelligence, volume 34, pages
1177–1185.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
298
