
Tail-Latency Aware and Resource-Efficient Bin Pack Autoscaling for
Distributed Event Queues
Mazen Ezzeddine
1,2
, Françoise Baude
1
and Fabrice Huet
1
1
Université Côte d’Azur, CNRS, I3S Nice, France
2
HighTech Payment Systems, HPS, Aix en Provence, France
Keywords: Distributed Queue, Bin Pack, Tail Latency, Dynamic Resource Provisioning, Autoscaler, Rebalancing, Kafka,
Event Consumer Group, Message Broker.
Abstract: Distributed event queues are currently the backbone for many large-scale real-time cloud applications
including smart grids, intelligent transportation, and health care monitoring. Applications (event consumers)
that process events from distributed event queue are latency-sensitive. They require that a high percentile of
events be served in less than a desired latency. Meeting such desired latency must be accomplished at low
cost in terms of resources used. In this research, we first express the problem of targeting resource-efficient
and latency-aware event consuming from distributed event queues as a bin pack problem. This bin pack
depends on the arrival rate of events, the number of events in the queue backlog, and the maximum
consumption rate of event consumers. We show that the proposed bin pack solution outperforms a linear
autoscaling solution by 3.5% up to 10% in terms of latency SLA. Furthermore, we discuss how dynamic event
consumers provisioning in distributed event queues necessitates a blocking synchronization protocol. We
show that this blocking synchronization protocol is at conflict with meeting a desired latency for high
percentile of events. Hence, we propose an extension to the bin pack autoscaler logic in order to reduce the
tail latency caused by the events accumulated during the blocking synchronisation protocol.
1 INTRODUCTION
Distributed event queues have emerged as a central
component in building large scale and real time cloud
applications. They are currently being used in many
latency-sensitive cloud applications such as recording
and analyzing web accesses for recommendations and
ad placement (Goodhope et al., 2014), health care
monitoring (Al-Aubidy et al., 2017), fraud detection
(Mohammadi et al., 2018), smart grids (Albano et al.,
2015) and intelligent transportation (Fernández-
Rodríguez et al., 2017). Furthermore, distributed
event queues are the backbone for the event driven
microservices software architectural style where an
application is composed of several small services
communicating by exchanging events across a
distributed event queue (Laigner et al., 2020;
Pallewatta et al., 2022; Xiang et al., 2021). As such,
many cloud providers already offer event queue as a
service (Amazon Kinesis, 2023; Azure Event Hub,
2023; Google Cloud Pub/Sub, 2023).
A distributed event queue is composed of several
partitions or sub-queues deployed over a cluster of
servers. Applications (event consumers) that pull and
process events from distributed queues are latency-
sensitive. They require that a high percentile of events
is processed in less than a desired latency. Otherwise,
providing end-users with experience beyond such
desired latency might result in million dollars
reduction in revenues as indicated by several tech
giants (Eaton, 2012). Overprovisioning of resources
to meet the desired latency is not the optimal solution
since it incurs large monetary cost for the service
provider. Therefore, architecting solutions for
resource-efficient and latency-aware event
consumers from distributed event queues is of
paramount importance. As we describe throughout
this paper, latency-aware and cost-efficient (cost-
efficient and resource-efficient will be used
interchangeably) event consumers denotes two
simultaneous objectives to be met by the designed
architecture : (1) ensuring that the latency for a high
percentile of events served by event consumers is less
than a desired latency, that is, reduce tail latency
(Dean and Barroso, 2013) and (2) the designed
architecture is able to dynamically provision and
50
Ezzeddine, M., Baude, F. and Huet, F.
Tail-Latency Aware and Resource-Efficient Bin Pack Autoscaling for Distributed Event Queues.
DOI: 10.5220/0012630100003711
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 14th International Conference on Cloud Computing and Services Science (CLOSER 2024), pages 50-64
ISBN: 978-989-758-701-6; ISSN: 2184-5042
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

deprovision resources (event consumers replicas) so
that the usage of resources is minimized while
guaranteeing (1).
Solutions offered by cloud providers and by on-
premises cluster orchestrators such as Kubernetes
(KEDA, 2023) to scale event consumer replicas when
a certain metric reaches a certain threshold are not
satisfactory. In essence, these autoscalers assume a
linear relationship between the current value of a
monitored metric and the desired value of that metric
to compute the needed number of replicas. Hence, a
linear autoscaler for event queues emulating cloud
autoscalers will use the ratio of the arrival rate of
events to the maximum consumption rate per replica
to get the needed number of replicas. However, the
number of needed replicas meets a bin pack solution
rather than a linear one as we describe throughout this
paper. Furthermore, Kubernetes and cloud
autoscalers are not middleware/platform aware. As
such, they do not recommend or participate in the
assignment of the provisioned event consumer
replicas to partitions. Rather, they rely on the
distributed event queue middleware logic for
assigning partitions to event consumers. This might
result in scenarios where event consumer replicas
might not be assigned to partitions in a latency-aware
manner, even if enough replicas are provisioned by
such autoscalers. A latency-aware and resource-
efficient autoscaler for distributed event queue must
provision just enough replicas to achieve the desired
latency, and it must recommend to the distributed
event queue middleware the assignment of partitions
to the provisioned event consumer replicas in order to
guarantee the desired latency.
As we discuss throughout this paper, in distributed
event queues aiming at high percentile latency SLA
is not straightforward even in the presence of a
dynamic resource provisioning mechanism. This is
because reducing the percentage of events that exhibit
a latency beyond the desired latency (that is, the tail
latency) while at the same time dynamically
provisioning and deprovisioning of resources (event
consumer replicas) are two objectives which are at
conflict in distributed event queues. This stems from
the fact that scaling up or down event consumers
necessitates a blocking synchronization protocol to
distribute the load of the events waiting in queues
among the provisioned event consumer replicas.
During this synchronization protocol, which is also
called rebalancing or assignment (Blee-Goldman,
2020; Narkhede et al., 2017) all the event consumer
replicas will stop processing events, thus eventually
contribute to a larger tail latency and less percentile
of latency SLA guarantee. The increase in the tail
latency results from the fact that all the events
arriving during the synchronization protocol
execution will exhibit a relatively higher latency as
compared to the latency of events processed during
normal operation of the system. Clearly, the relation
between the desired latency SLA and the time of the
blocking rebalancing protocol dictates if there is some
space for regularly and dynamically modifying or not
the number of event consumers. If the rebalancing
time is very high compared to the desired latency
SLA, obviously the only deployment that can ensure
the desired latency SLA for a high percentile of
events is one where all replicas would be provisioned
from start-up time (an overprovisioned solution).
Even if this is at a cost considered to be non-optimal
as some of the ready replicas may not operate all the
time. But if the ratio of the desired latency SLA to the
rebalancing time is greater than 1, a good tradeoff can
be sought: a just-needed number of replicas deployed
while ensuring a small tail-latency. Our research
contributes a solution towards finding such a tradeoff,
still prioritizing the latency SLA guarantee over cost
reduction.
To achieve this, we first formulate the problem of
autoscaling event consumers from distributed event
queues to meet a desired latency as a bin pack
problem: it depends on the arrival rate of events into
queues which can even be skewed, the number of
events in the queues backlog, and the maximum
consumption rate of the event consumers. We
propose an appropriate heuristic (Least Loaded) to
solve the bin pack problem in polynomial time and to
maintain a balanced load in terms of events served by
each event consumer replica. As the synchronization
protocol upon consumer replica (un-)provisioning is
blocking, we extend our initial bin pack solution by
taking into account new events that will accumulate
during the autoscaling. We also propose several
recommendations on the configurations of the
rebalancing protocol that contribute to a lower tail
latency. We first experimentally show that on some
selected workloads, our bin pack solution
outperforms a linear autoscaling solution by 3.5% up
to 10% in terms of latency guarantee in a first system
setting where rebalancing time overhead is way
smaller than the desired latency SLA. Then, under
other and less favourable system settings regarding
rebalancing overhead, we show that the proposed bin
pack extension applied to the same workloads results
in a lower tail latency, and thus better latency SLA,
but at higher resource utilization cost.
To our knowledge, latency-aware and dynamic
resource provisioning for distributed event queues in
the presence of a blocking resource synchronization/
Tail-Latency Aware and Resource-Efficient Bin Pack Autoscaling for Distributed Event Queues
51
rebalancing protocol has not yet been addressed in the
literature.
2 CONTEXT - BACKGROUND
We target a general event driven architecture where
applications (that is, event consumers) pull and
process events from distributed event queues. As
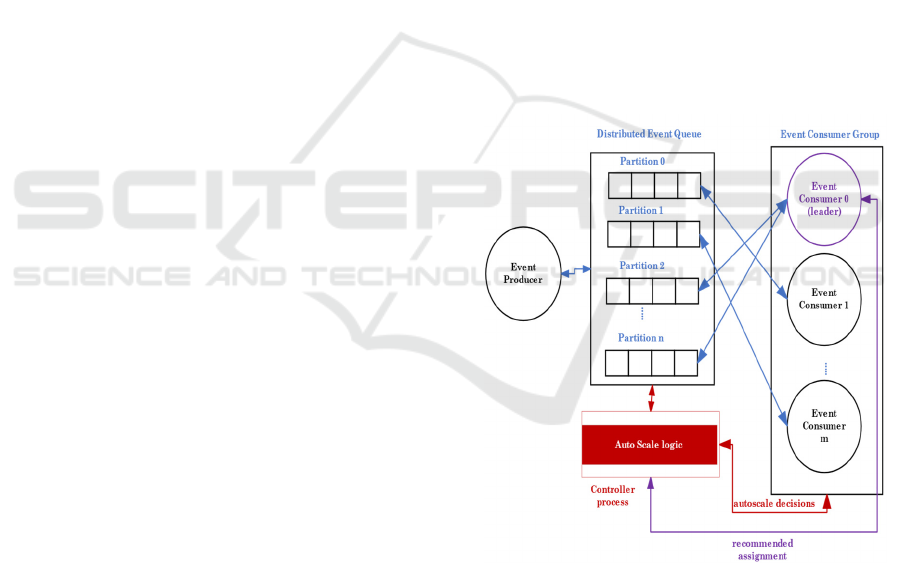
shown in Figure 1, a distributed event queue is
composed of several partitions (sub-queues)
deployed over a cluster of servers. A producer
application generates events and writes them into a
certain partition of the distributed queue according to
a partitioning strategy. An event consumer group is a
set of event consumers that jointly and cooperatively
consume events from the partitions of the distributed
queue. Generally, for a distributed event queue, we
have n partitions and m consumers that read and
process events. The (re-) assignment of the m
consumers to the n partitions (or inversely) is
performed through a blocking synchronization
protocol. This synchronization protocol is called
rebalancing (or assignment). The terms
synchronization, rebalancing and assignment will be
used interchangeably thereafter. As stated earlier, the
rebalancing protocol represents a short time of
unavailability during which all event consumers will
stop processing events. Rebalancing might happen
several times during the lifetime of an event
consumer group such as when the group is initiated,
or when a consumer leaves or joins the group. Hence,
every scale action to add or remove event consumers
to/from the consumer group will trigger a rebalancing
process. The rebalancing duration is among the
metrics exposed by the distributed event queue
middleware, and hence, it can be measured
dynamically. As shown in Figure 1, each partition of
the distributed event queue must be assigned to
exactly one event consumer. Consumers, on the other
hand, can be assigned several partitions.
Event consumers operate in group. The
management of the event consumer group is
performed by a special process called consumer
group coordinator. The coordinator process is a part
of the distributed event queue middleware. It
appropriately handles requests sent by event
consumers to join or leave the group. Once registered
with the group, event consumers keep membership in
the group by sending periodic heartbeats to the
coordinator.
Moreover, the consumer group coordinator is
responsible of the execution of the
assignment/rebalancing protocol. As part of the
protocol execution, the coordinator offloads the
assignment logic to one of the event consumers
namely the leader. Next, the coordinator takes the
assignment proposed by the leader and inform each
member (event consumer replica) of the group about
its assigned partitions. Figure 1 shows the added
Controller process which runs periodically the
proposed bin pack dynamic scale logic to add or
remove event consumer replicas. Also, as part of our
proposed autoscaling logic, notice in Figure 1 how the
leader consumer calls the Controller for its
recommended latency-aware consumers-partitions
assignment as per the result of the bin pack.
Finally, it is noteworthy that we use Kafka
(Narkhede et al., 2017) as a distributed event queue.
Kafka is by far one of the most used distributed event
queues in the industry. Nevertheless, we believe that
the discussion and techniques used in this work are to
a broad extent generalizable to other distributed event
queues and not limited to Kafka. In this context, the
experimental use case employed in this research is a
simplified version of a Kafka-based payment
authorization system used in production.
Figure 1: A distributed event queue with an event producer
and event consumer group. Notice the assignment of
partitions to consumers. Shown also in red the Controller
process which runs the bin pack based autoscale logic and
recommends the resulting bin pack partitions-consumers
assignment to the consumer group leader.
CLOSER 2024 - 14th International Conference on Cloud Computing and Services Science
52

3 RELATED WORK
Performance SLAs are hard to guarantee. Cloud
providers rarely offer end-to-end performance
guarantee or focus on overprovisioning of resources
and isolation of services to meet a desired
performance SLA (Baset et al., 2012; Qu et al., 2018).
To our knowledge none of the cloud providers
offering distributed queue as a service provides
performance SLA (e.g., latency) guarantee for events
consuming and processing. Furthermore, none of the
existing, widely used event queues, such as MQTT
1
,
ActiveMQ
2
, RabbitMQ
3
and Kafka (Narkhede et al.,
2017), provides an SLA latency guarantee for event
processing.
Nevertheless, cloud providers offering distributed
event queues as a service provide autoscalers to add
or remove event consumer replicas depending on the
value of a monitored metric. In essence, these
autoscalers assume a linear relationship between the
current value of the monitored metric and the desired
value of that metric to compute the needed number of
replicas. Hence, as previously mentioned, a linear
autoscaler for event queues emulating cloud
autoscalers will compute the ratio of the event arrival
rate to the maximum consumption rate per replica to
get the needed number of event consumer replicas.
Unfortunately, this neither guarantees that the arrival
rate into each event consumer replica is less than its
maximum consumption rate, nor it associates a
maximum load of events to each consumer replica to
maintain a desired latency. Furthermore, cloud
autoscalers are not platform/middleware aware. As
such, when the arrival rate of events into partitions of
the distributed queue is not uniform, cloud
autoscalers and similar on-premises solutions
(KEDA, 2023) do not perform a load-aware
assignment of partitions to event consumer replicas.
Thus, leading to a situation where a subset of event
consumers replicas is assigned much higher load as
compared to the remaining replicas. In fact, recent
research (Wang et al, 2022) has shown that cloud
autoscalers for distributed event queues are not cost
efficient, and hence, clients are over-charged for
under-utilized resources. Also, these autoscalers may
rely on misleading metrics. For example, Amazon
Kinesis is not always capable of accurately
identifying bottlenecks as relying on CPU policy can
be misleading (Wang et al, 2022). As opposed to
relying on the CPU utilization metric, the research
1
http://mqtt.org/
2
http://activemq.apache.org/.
3
https://www.rabbitmq.com/
work of (Chindanonda et al, 2020) uses the ratio of
the total arrival rate to event consumption rate per
replica to estimate the required number of consumer
replicas. Nevertheless, similarly to cloud autoscalers,
(Chindanonda et al, 2020) do not consider the
assignment of partitions to consumer replicas in a
load-aware manner, neither it associates a desired
latency to a minimal number of replicas. Rather, it
aims at keeping the total consumption rate greater
than the total arrival rate into the distributed event
queue.
On the other hand, the impact of the blocking
synchronization protocol on the overall latency SLA
during dynamic provisioning is rarely addressed in
the literature. In this context, Kafka recently
introduced the cooperative incremental rebalancing
protocol (Blee-Goldman, 2020) that promotes
sticking partitions to their assigned consumers. The
benefit is that if a partition is not reassigned to a
different event consumer, consumption from it will
not be blocked. But this solution promotes stickiness
and data locality rather than load-awareness. For
example, given 3 partitions with different loads
assigned to 2 consumers, triggering the cooperative
incremental rebalancing protocol will privilege the
current assignment even if an event consumer is
assigned the 2 higher load partitions, and the other
consumer is assigned the lower loaded one. This
makes the incremental rebalancing protocol not
suitable for latency-awareness which requires that
partitions be freely (re-)assigned to maintain the
desired latency, rather than sticking them to their
assigned consumers at the cost of violating the
desired latency. To our knowledge, tail-latency
awareness of distributed event queues in face of a
blocking synchronization protocol is not yet
addressed in the literature.
4 MATHEMATICAL MODEL
FOR LATENCY-AWARE
BINPACK AUTOSCALING OF
AN EVENT CONSUMER
GROUP
The aim of this research is to provide an autonomic
event consumer replica provisioner so that a high
percentile of events is served in less than a desired
latency, while simultaneously minimizing the
Tail-Latency Aware and Resource-Efficient Bin Pack Autoscaling for Distributed Event Queues
53
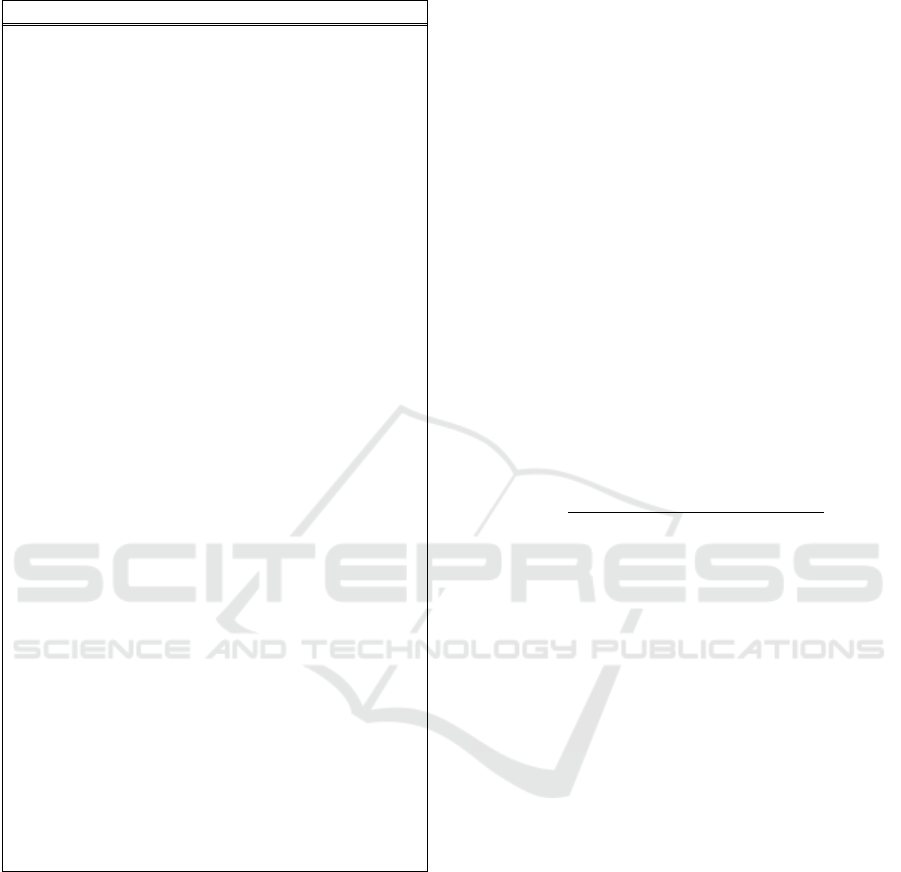
Table 1: Notations used in the mathematical description of
the tail latency-aware autoscaling model.
Notation Description
m An event consumer group m
𝑝
A partition of the distributed event queue
𝑤
Maximum event processing latency for m.
(latency for a high percentile of events
served by m shall be ≤ 𝑤
)
𝑙𝑎𝑔
Number of events waiting in the partition
𝑝
at time t.
𝜆
Partition 𝑝
event arrival rate at time t.
𝑙𝑎𝑔
Set of existing lag at time t for all
partitions.
𝑙𝑎𝑔
= {𝑙𝑎𝑔
,𝑙𝑎𝑔
,…, 𝑙𝑎𝑔
}
𝜆
Set of arrival rates at time t for all
partitions.
λ
={𝜆
,𝜆
, ….,𝜆
}
𝑚
j
th
replica of the event consumer group.
𝜇
Maximum consumption rate per single
replica of m.
𝑙𝑎𝑔
Lag of the j
th
replica of the consumer
group 𝑚 at time t.
𝜆
Arrival rate into the j
th
replica of the
consumer group 𝑚 at time t.
𝐺
Set of replicas for the consumer group m
needed at time t to guarantee 𝑤
.
𝐺
Available set of replicas in m.
decision
interval
Interval of time between two successive
scale decisions.
𝑡
Time to complete a rebalance.
𝑙𝑎𝑔
Number of events accumulated in the
partition 𝑝
due to a rebalance.
𝑡𝑜𝑡𝑎𝑙𝐿𝑎𝑔
Total lag of a partition (existing lag plus
rebalancing lag)
𝑙𝑎g
Set of total lag at time t for all partitions.
𝑙𝑎g
= {𝑡𝑜𝑡𝑎𝑙𝐿𝑎𝑔
,𝑡𝑜𝑡𝑎𝑙𝐿𝑎𝑔
,…}
𝑓
Scale up threshold
𝑓
Scale down threshold
desired latency, while simultaneously minimizing the
number of replicas used. The autonomic replica
provisioning logic is executed at each decision
interval by the Controller process as shown in Figure
1. A decision interval is a configurable interval of
time between 2 successive scale decisions as
indicated in Table 1 where all notations used
throughout this section are summarized.
This section is designed to develop the
mathematical model we use for the logic of the
autonomic event consumer provisioner/autoscaler. It
is modelled as a two-dimensional bin pack problem
where event consumer replicas are the bins and
partitions are the items. In this work, we use
homogenous event consumers, that is, all event
consumer replicas have the same event processing
rate, an extension to heterogeneous consumers is in
progress.
Given a distributed event queue with n partitions,
𝑙𝑎𝑔
is the number of events waiting in the partition
𝑝
at time t. Similarly, 𝜆
denotes the event arrival
rate into the partition 𝑝
at time t. The set of arrival
rates into each partition at time t is denoted as λ
=
{𝜆
,𝜆
, ….,𝜆
}. The set of existing lag for each
partition at time t is denoted as
𝑙𝑎𝑔
= {𝑙𝑎𝑔
,𝑙𝑎𝑔
,…, 𝑙𝑎𝑔
}.
𝑚
denotes a j
th
replica of the event consumer
group m. Recall from section 2 that a partition 𝑝
can
be assigned to exactly one event consumer 𝑚
, while
an event consumer can be assigned many partitions.
The maximum consumption rate per any replica of m
𝜇
is calculated as the number of events polled by the
replica divided by their processing time as shown in
equation 1.
𝜇
=
# 𝑒𝑣𝑒𝑛𝑡𝑠 𝑝𝑜𝑙𝑙𝑒𝑑 𝑝𝑒𝑟 𝑎 𝑟𝑒𝑝𝑙𝑖𝑐𝑎
𝑗
𝑜𝑓 𝑚
𝑃𝑟𝑜𝑐𝑒𝑠𝑠𝑖𝑛
𝑔
𝑇𝑖𝑚𝑒 𝑜
𝑓
𝑒𝑣𝑒𝑛𝑡𝑠
(1)
𝑙𝑎𝑔
is the lag of the j
th
replica of the consumer
group 𝑚 at time t. It is defined as the sum of lags of
each partition assigned to 𝑚
as shown in equation 2.
𝑙𝑎𝑔
=𝑙𝑎𝑔
∈
(2)
𝜆
=𝜆
∈
(3)
Similarly, 𝜆
is the arrival rate into 𝑚
at time t. It
is defined as the sum of arrival rates of each partition
assigned to 𝑚
as shown in equation 3.
Notice that in case a certain partition features an
arrival rate greater than the maximum consumption
rate, the controller logic, better described below, will
suggest the only possible solution: have this partition
be the only one associated to a given consumer.
However, this case should not happen if one assumes
that the topic is partitioned in a way that guarantees
that 𝜆
< 𝜇
∀ 𝑡. Otherwise, solving the problem
of latency SLA guarantee would require dynamic
topic repartitioning, which is out of scope of this
work.
If later on, the arrival rate decreases below the
maximum consumption rate, the system will have an
opportunity to scale down and assign that partition to
another consumer holding some other partitions. This
CLOSER 2024 - 14th International Conference on Cloud Computing and Services Science
54

dynamicity due to arrival rate of workload being
dynamic is the key advantage of our proposition
compared to a system overprovisioned from the initial
stage.
𝑤
is the desired maximum total event processing
latency for the event consumer group m. That is, a
high percentile of events served by any replica of m
shall exhibit a latency ≤ 𝑤
. Now consider a time
t where a decision on the minimal set of replicas for
the consumer group m (we call it 𝐺
) must be made.
In this context, to increase the percentile of latency
SLA among the arriving events, we must ensure the
following:
∀ 𝑚
∈𝐺
𝑙𝑎𝑔
< 𝜇
× 𝑤
𝐴𝑁𝐷 𝜆
< 𝜇
(4)
Equation 4 states the following: at time t, ensure
that: (1) each event consumer replica 𝑚
can absorb
its existing lag ( 𝑙𝑎𝑔
) in less than 𝑤
. This will
contribute towards maintaining the waiting time of
the newly arrived events less than 𝑤
, and thus
increasing their chance of respecting the latency SLA.
(2) each event consumer replica has the measured
arrival rate into its assigned partitions less than its
maximum consumption rate. Nevertheless, it is
noteworthy that as a partition can be assigned to
exactly one consumer (and not to many consumers),
equation 4 can sometimes be violated, so does not
guarantee that there won’t be any latency violation.
For instance, it is possible that a partition has its lag
greater than 𝜇
×𝑤
because during the
preceding interval some partitions assigned to the
same consumer exhibited an increase in their arrival
rate. In such case the best possible solution consists
now of assigning a dedicated consumer to that
partition. However, this single dedicated consumer
will not be able to process the existing lag in less than
𝑤
and consequently some events will violate the
latency SLA.
Let 𝐺
= {𝑚
,𝑚
,…, 𝑚
} denotes the set of
event consumer replicas needed at time t to preserve
the latency requirements of the event consumer group
m as per equation 4. The aim now is to decide on the
minimum number of event consumer replicas for m,
that is, the cardinality of 𝐺
to satisfy equation 4.
This can be mathematically expressed as per equation
5 below:
𝑚𝑖𝑛
|
𝐺
|
𝑠𝑢𝑐ℎ 𝑡ℎ𝑎𝑡
∀ 𝑚
∈𝐺
(5)
𝑙𝑎𝑔
< 𝜇
×𝑤
𝐴
𝑁𝐷 𝜆
< 𝜇
The optimization problem in 5 can be formulated as
an Integer Linear Programming (ILP) model. In the
formulation below 𝑔
and 𝑝
are binary variables
indicating respectively whether a j
th
event consumer
replica is used at time t, and whether partition i is
assigned to replica j at time t.
𝑚𝑖𝑛 |𝐺
𝑚
𝑡
|= 𝑔
𝑗
𝑗
such that
∑
𝑝
= 1 ∀ 𝑖 ;
(
𝑎
)
∑
𝑝
𝑙𝑎𝑔
≤ 𝑔
× 𝜇
×𝑤
∀ 𝑗
(b)
∑
𝑝
𝜆
≤ 𝑔
×𝜇
∀ 𝑗
(c)
∑
𝑔
≤ 𝑛𝑏 𝑜𝑓 𝑝𝑎𝑟𝑡𝑖𝑡𝑖𝑜𝑛𝑠 (d)
𝑔
, 𝑝
𝑏𝑖𝑛𝑎𝑟𝑦 𝑣𝑎𝑟𝑖𝑎𝑏𝑙𝑒𝑠,𝑡 > 0
(a) ensures that each partition is assigned to only one
event consumer replica, (b) ensures that the sum of
lags of the partitions assigned to each event consumer
replica is less than the lag that can be served in 𝑤
which is equivalent to 𝜇
×𝑤
. Similarly, (c)
ensures that the sum of arrival rates of the partitions
assigned to each event consumer replica is less than
the maximum consumer consumption rate 𝜇
.
Finally, (d) ensures that the number of event
consumers used is less or equal to the number of
partitions.
The ILP formulation shows that the problem of
assigning partitions to event consumers while
guaranteeing the 𝑤
latency requirement is NP-
complete. This assignment problem is equivalent to a
two-dimensional bin packing where, at time t, the
items are the partitions described by their arrival rates
𝜆
and by their lags 𝑙𝑎𝑔
. The bins, on the other hand,
are the event consumer replicas described by their
maximum consumption rate 𝜇
and by their
maximum consumption rate multiplied by 𝑤
i.e.,
𝜇
×𝑤
.
As this assignment problem must be solved
online, we resorted to an approximation algorithm
that can solve the problem in polynomial time.
Furthermore, to ensure a balanced load to each event
consumer replica we used the Least-Loaded bin pack
heuristic. It was proposed by (Ajiro and Tanaka,
2007) for packing VMs in a datacenter into a minimal
number of physical servers, while guaranteeing a fair
(load-balanced) assignment of VMs across the
physical servers.
Tail-Latency Aware and Resource-Efficient Bin Pack Autoscaling for Distributed Event Queues
55
scaleEventConsumer (𝝀
𝒕
, 𝒍𝒂𝒈
𝒕
, 𝝁
𝒎
𝒋
, 𝒘
𝒔𝒍𝒂
, 𝒇
𝒖𝒑
,
𝒇
𝒅𝒐𝒘𝒏
)
1 Set 𝐺
to the current set of replicas of m
2 Set 𝐺
= Least-Loaded (𝜆
, 𝑙𝑎g
, 𝑤
, 𝜇
×𝑓
)
3 IF |𝐺
| > |𝐺
|
//Current nb of consumers violates the latency SLA,
scale up
4 Scale up by 𝐺
\ 𝐺
5 ELSE
6
𝐺
= 𝐺
7
𝐺
= Least-Loaded (𝜆
, 𝑙𝑎𝑔
, 𝑤
, 𝜇
×𝑓
)
8 IF |𝐺
|< |𝐺
|
//We can scale down without violating the latency SLA
9 Scale down by 𝐺
/ 𝐺
10 ELSE
//Current partitions-consumers assignment violates the
latency?
11 IF assignmentViolatesTheSLA(𝑓
)
//A reassignment is needed, we reassign as per 𝑮
𝒓𝒆𝒂𝒔𝒔𝒊
𝒈
𝒏
12 Trigger a rebalance (𝐺
)
13 END IF
14 END IF
15 END IF
Algorithm 1: The latency-aware bin pack autoscaler.
We have introduced two additional parameters to
the original Least-Loaded bin pack heuristic namely
𝑓
and 𝑓
with 0< 𝑓
< 𝑓
<1. For
scaling-up, the Least-Loaded heuristic performs the
packing into µ
×𝑓
(instead of µ
). In essence,
using a value for 𝑓
smaller than 1 ensures that the
bin (event consumer) will not be used at its full
capacity, and hence, the controller will have margin
to scale up slightly before 𝑤
is reached. Example
of values for 𝑓
include 0.9, 0.8 and 0.7. An 𝑓
of
0.7 will provide earlier scale up as compared to an 𝑓
of 0.8 or 0.9. This will generally provide a better
latency SLA but at a higher cost in terms of replica-
minutes (that is, the number of minutes during which
a single event consumer replica is used and the client
is billed for its usage) as compared to an 𝑓
of 0.8 or
0.9. On the other hand, for scaling-down, the bin pack
heuristic performs the packing into µ
×𝑓
(instead of µ
). 𝑓
controls the frequency of
scale down. Example of values for 𝑓
include 0.5,
0.4 and 0.3. For a constant value of 𝑓
, an 𝑓
of
0.3 will result in a smaller number of scale down
actions as compared to an 𝑓
of 0.4 or 0.5 but at a
higher cost in terms of replica-minutes.
The logic of the bin pack autoscaler is shown in
the Algorithm scaleEventConsumer above. In the
algorithm, 𝐺
refers to the already existing set of
replicas of m. At time t, the algorithm calculates 𝐺
by packing the partitions into 𝜇
×𝑓
(line 2). If
|𝐺
|>|𝐺
|, then a scale up is needed (line 3-4). The
set 𝐺
\𝐺
denotes the set of the replicas to be added.
If a scale up action is not necessary, 𝐺
is computed
again using 𝜇
×𝑓
(lines 6-8). If |𝐺
|<
|𝐺
|, then a scale down is needed and the set
𝐺
\𝐺
denotes the set of the replicas to be removed.
If neither a scale up nor a scale down is performed,
the logic checks if the current assignment of partitions
to existing event consumer replicas violates the
latency SLA. If so (line 11), we trigger a
rebalance/reassignment so that the replicas-partitions
assignment as per 𝐺
takes place. The
assignment is performed as per 𝐺
because
checking whether the current replicas-partitions
assignment violates the latency SLA is parametrized
by 𝑓
as shown in line 11. The parametrization by
𝑓
is selected because the assignment resulting from
packing the partitions into 𝜇
×𝑓
(larger bins)
will result in a more balanced load across the event
consumer replicas as compared to packing the
partitions into 𝜇
×𝑓
(smaller bins). Finally, if
there is no violation of the latency SLA, the algorithm
terminates without action. The logic for the
procedure assignmentViolatesTheSLA(𝑓
) is shown
below. On the other hand, the Least-Loaded bin pack
heuristic is discussed in detail in (Ajiro and Tanaka,
2007). We do not show its pseudocode in this paper
due to space limitation.
assignmentViolatesTheSLA (𝒇
𝒖
𝒑
)
1 Set 𝐺
to the existing set of event consumers
2 FOR each 𝑚
in 𝐺
//Equation 4 of the model is violated
3
IF 𝑙𝑎𝑔
>𝜇
×𝑤
×𝑓
OR 𝜆
> 𝜇
×𝑓
4 RETURN TRUE
5 END IF
6 END FOR
7 RETURN FALSE
4.1 Event Consumer Replica
Provisioning with Planning for the
Events Accumulated during
Rebalancing (Tail Latency Aware
Autoscaling)
As stated before, upon a scale action, event
consumers will be blocked, and hence events arriving
during the rebalancing will be accumulated and
lagged in the partitions of the distributed queue until
the end of the rebalancing process. The accumulated
lag per partition 𝑙𝑎g
is equal to the arrival rate into
that partition multiplied by the rebalancing time (𝑡
)
as shown in equation 8 below. Note that the
CLOSER 2024 - 14th International Conference on Cloud Computing and Services Science
56

rebalancing time (𝑡
) is among the metrics exposed
by the distributed event queue middleware.
𝑙𝑎g
= 𝜆
×𝑡
(6)
The case of event consumer replica provisioning
while planning for the number of events that will be
lagged during rebalancing consists as well of packing
the partitions into event consumers. However, in this
case the lag of each partition consists of the existing
lag in the partition plus the prospective lag that will
be accumulated upon a scale action. This is denoted
as 𝑡𝑜𝑡𝑎𝑙𝐿𝑎𝑔
as described in Table 1. 𝑡𝑜𝑡𝑎𝑙𝐿𝑎𝑔
can be calculated as per equation 9 below where 𝑙𝑎g
is the lag resulting from a rebalance/assignment and
𝑙𝑎𝑔
is the existing lag in the partition.
𝑡𝑜𝑡𝑎𝑙𝐿𝑎𝑔
= 𝑙𝑎g
+ 𝑙𝑎𝑔
(7)
scaleEventConsumer2 (𝝀
𝒕
, 𝒍𝒂𝒈
𝒕
, 𝒍𝒂𝐠
𝒕𝒐𝒕𝒂𝒍
𝒕
, 𝝁
𝒎
𝒋
, 𝒘
𝒔𝒍𝒂
,
𝒇
𝒖
𝒑
, 𝒇
𝒅𝒐𝒘𝒏
)
1 action = null
2 action = scaleNeeded(𝜆
, 𝑙𝑎𝑔
, 𝜇
,𝑤
𝑠𝑙𝑎
, 𝑓
, 𝑓
)
3 IF action != null
doScale(𝜆
, 𝑙𝑎g
, 𝜇
𝑚
𝑗
, 𝑤
𝑠𝑙𝑎
, 𝑓
, 𝑓
)
4 END IF
Algorithm 2: The tail latency-aware bin pack autoscaler
logic executed by the Controller at each decision interval
(planning for the lag accumulated during rebalancing).
In this context, the set of total lag (existing and
rebalancing) for all the partitions is denoted as
𝑙𝑎g
= {𝑡𝑜𝑡𝑎𝑙𝐿𝑎𝑔
,𝑡𝑜𝑡𝑎𝑙𝐿𝑎𝑔
,… } as
indicated in Table 1.
As shown in Algorithm 2
(scaleEventConsumer2), event consumer replica
provisioning while planning for the rebalancing lag
requires a slight modification into Algorithm 1
(scaleEventConsumer). This modification is
performed in two phases. In the first phase, Algorithm
2 calls the procedure scaleNeeded shown below.
scaleNeeded performs the exact logic of Algorithm 1
using the set of partitions existing lag 𝑙𝑎𝑔
and
without performing any scale action. Instead,
scaleNeeded returns an “UP”, “DOWN” or “REASS”
flag depending on the scale action recommended. In
the second phase, the procedure doScale shown
below is called. doScale performs the scale action
recommended in the first phase while considering the
lag that will accumulate during the prospective
rebalancing. To this end, the set of total partitions lag
(existing and rebalancing)
𝑙𝑎g
and the
recommended scale action
are passed as argument to
doScale. Depending on the action passed, doScale
performs the appropriate Least Loaded bin pack using
𝑙𝑎g
. It then performs the appropriate scale action
and provide the required replicas accordingly.
scaleNeeded (𝝀
𝒕
, 𝒍𝒂𝒈
𝒕
, 𝝁
𝒎
𝒋
, 𝒘
𝒔𝒍𝒂
, 𝒇
𝒖𝒑
, 𝒇
𝒅𝒐𝒘𝒏
)
1 Set 𝐺
to the current set of replicas of m
2 Set 𝐺
= Least-Loaded (𝜆
, 𝑙𝑎g
, 𝑤
, 𝜇
×𝑓
)
3 IF |𝐺
| > |𝐺
|
4 RETURN “UP”
5 ELSE
6
𝐺
=𝐺
7
𝐺
= Least-Loaded(𝜆
, 𝑙𝑎𝑔
, 𝑤
, 𝜇
×𝑓
)
8 IF |𝐺
|<|𝐺
|
9 RETURN “DOWN”
10 ELSE
11 IF assignmentViolatesTheSLA(𝑓
)
12 RETURN “REASS”
13 END IF
14 END IF
15 END IF
Procedure 1: A function that performs Least-Loaded bin
pack and returns the action needed without performing any
scale action.
doScale (𝝀
𝒕
, 𝒍𝒂𝒈
𝒕𝒐𝒕𝒂𝒍
𝒕
, 𝝁
𝒎
𝒋
, 𝒘
𝒔𝒍𝒂
, 𝒇
𝒖𝒑
, 𝒇
𝒅𝒐𝒘𝒏
, action)
1 Set 𝐺
to the current set of replicas of m
2 IF action == “UP” OR “REASS”
3 𝐺
= Least-Loaded (𝜆
, 𝑙𝑎g
, 𝑤
, 𝜇
×𝑓
𝑢𝑝
)
4 IF |𝐺
| > |𝐺
|
5 Scale up by 𝐺
\𝐺
6 ELSE
7 Trigger a rebalance(𝐺
)
8 END IF
9 ELSE //action = down
10 𝐺
= Least-Loaded (𝜆
, 𝑙𝑎g
, 𝑤
, 𝜇
×
𝑓
𝑑𝑜𝑤𝑛
)
11 IF |𝐺
| < |𝐺
|
12 Scale down by G
\ G
13 END IF
14 END IF
Procedure 2: A procedure that performs the required scale
action while taking the rebalancing lag into account.
5 EXPERIMENTAL WORK
In this section we report some of the experiments we
performed using Algorithm 2
(scaleEventConsumer2) described in the previous
section. As discussed previously, this algorithm
performs bin pack replica provisioning with planning
for the events that will be lagged during rebalancing.
For the experiments we used two workloads. The
first is adapted from (Chindanonda et al, 2020). It is a
10-minutes workload with a total of around 109k
events. The arrival rate per second of the 109K events
Tail-Latency Aware and Resource-Efficient Bin Pack Autoscaling for Distributed Event Queues
57
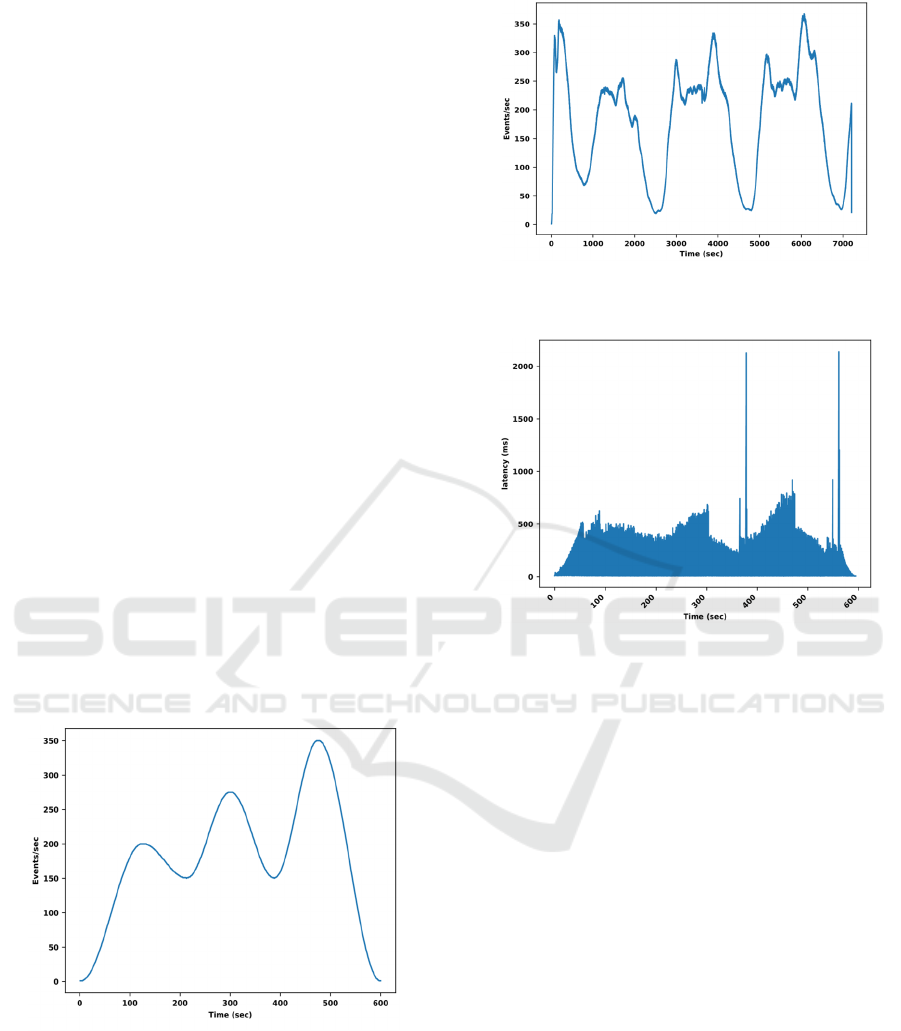
is distributed over the 10 minutes interval as shown
in Figure 2. The second workload, see Figure 3,
corresponds to a two-hours trace from the New York
City Taxi Trip dataset (Donovan and Work, 2016).
This dataset contains records for four years (2010 -
2014) of taxi trips in New York City. We used a 2h
long trace from January 2013 trips. To construct the
trace, we employed a speed factor of 40. This means
that 40 seconds of real-world events are replayed in 1
second in the experiments. The trace contains around
1.35M events with arrival rate distributed over the 2h
interval as shown in Figure 3. Each batch of events
sent to the distributed queue is uniformly distributed
across the partitions unless otherwise stated.
As a business use case, we used a simplified
payment authorization application (adapted from real
payment authorization system used in production). In
our experimental setup, a producer application
generates payment events with a rate per second
corresponding to the employed workload. The
payment events are written into the distributed event
queue. An event consumer group pulls the payment
events out of the distributed queue and either declines
or accepts the payment. We set
𝑤
to 500 ms as per
the business requirement. The processing time per
payment event was set to 5 ms. This processing time
was used since it corresponds to the 100-percentile
(worst case) processing latency for a payment event.
Hence, the maximum consumption rate µ used
throughout the experiments is equal to 200
events/seconds.
Figure 2: First workload used in the experiments.
All the experiments were performed on Google
Cloud Platform GCP using a Kubernetes cluster
(version 1.20.6-gke.1400) composed of 5 virtual
machines each with 4 vcpu and 16GB of RAM.
Throughout the experiments we used a distributed
event queue with 5 partitions unless otherwise stated.
The distributed event queue is based on Kafka version
Figure 3: Second workload used in the experiments: 2h
trace from the NYC taxi driver dataset.
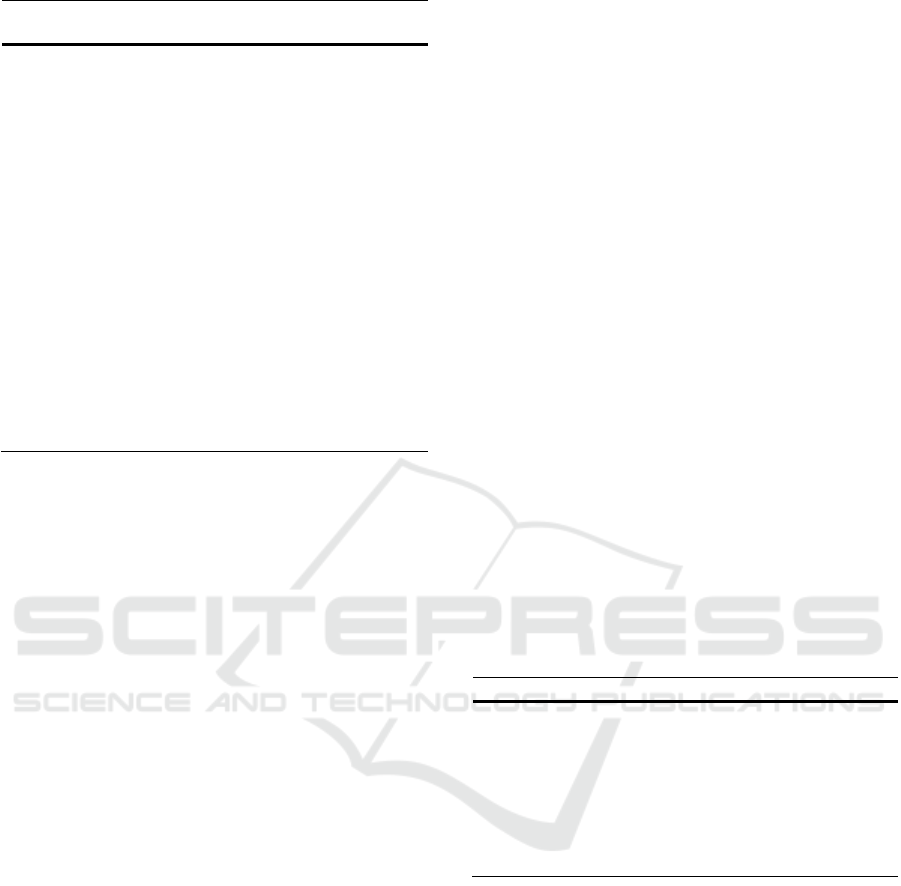
Figure 4: Event latencies for Algorithm 2 with the first
workload.
2.7. The decision interval is set to 1 second. The
couple (fup, fdown) was set to (0.9, 0.4). Finally, we
note that 99-percentile rebalancing time in our
deployment setup was equivalent to 50 ms. This value
was used as the rebalancing time (tr) to compute the
lag accumulated on a rebalancing process as per
equation 8.
5.1 Performance of the Proposed
Least-Loaded Binpack (Algorithm
2)
Now we report the performance of Algorithm 2 that
uses the Least-Loaded bin pack to provision and
deprovision event consumer replicas. As discussed in
section 3, this algorithm aims at maintaining the event
total latency at less than the desired latency (500 ms)
while simultaneously aiming at minimizing the
number of replicas used. Figure 4 shows the event
latencies for Algorithm 2 under the first workload.
Also, Figure 5 shows the event latency per each of the
provisioned event consumer replica over the lifetime
of the experiment. Notice in Figure 5 the provisioning
and deprovisioning time for the 7 event consumer
CLOSER 2024 - 14th International Conference on Cloud Computing and Services Science
58
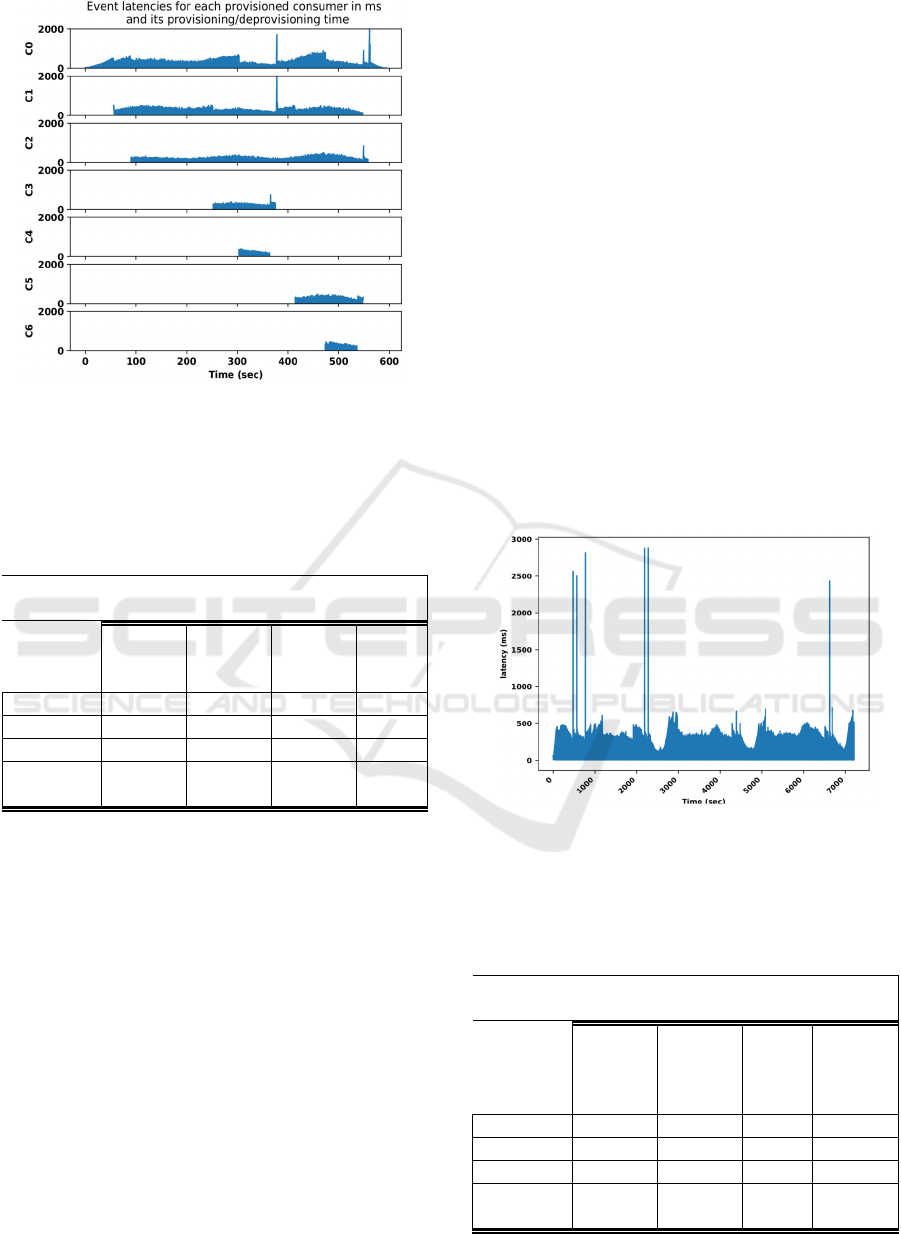
Figure 5: Event latency for each of the 7 event consumers
used by Algorithm 2 with the first workload. Ci on the y-
axis denotes the ith consumer.
Table 2: Latency SLA and replica-minutes of Algorithm 2
(with the first workload) compared to an overprovisioning
solution and an optimal autoscaler. Also shown the results
for the Linear autoscaling solution.
wsla = 500 ms, decision interval = 1 second, µ= 200
events/sec
First
Workload
%
latency
SLA
Cost
replica-
minutes
Nb of
Scale
UP
Nb of
Scale
Down
Alg. 2 97.4 30.21 6 6
Linear 94.7 25.5 6 6
Optimal 100 32.7 6 6
Overpro-
visioning
100 50 0 0
replicas provisioned over the lifetime of the
experiment. Figure 6 shows the event latencies for
Algorithm 2 under the NYC Taxi workload. We do
not show the event latency per each provisioned
replica over the time interval of the NYC workload
due to space limitation. The results for the first and
second workload are shown in Table 2 and 3
respectively. For instance, as shown in Table 2, with
the first workload, the latency-aware bin pack
autoscaler (Algorithm 2) scored 97.4% latency SLA
at 30.21 replica-minutes. On the other hand, an
optimal autoscaler scored 32.7 replica-minutes at
100% latency guarantee. Note that the results for the
optimal autoscaler were obtained using a python
simulator where event consumer replicas are
provisioned when the rate of event arrivals reaches
the latency-violating number of events (that is,
𝜇
×𝑤
), and deprovisioned otherwise. Also, with
the optimal autoscaler, replicas are provisioned
instantaneously, and the rebalancing/synchronization
time is set to zero. The overprovisioning solution
scored 100% latency SLA at the cost of 50 replica-
minutes. Implementing overprovisioning
experiments means: the number of event consumers
is resulting from Algorithm 2 (Least-Loaded bin
pack) but when the partitions are considered to be
filled at their maximum arrival rate as per the input
workload. That is, it considers the partitions arrival
rate is equal to the peak arrival rate of the input
workload divided by the number of partitions. For
each case, notice the number of scale up and down
actions. Later in this section we compare our bin pack
autoscaler with a Linear autoscaler solution under
non-skewed and skewed workloads.
Table 3 summarizes results obtained using the
second workload. Therefore, the proposed bin pack
autoscaler provided 31% reduction in cost as
compared to an overprovisioning solution
(overprovisioning is largely used by cloud providers
for performance SLAs) at around 1% decrease in
latency guarantee.
Figure 6: Event latencies for Algorithm 2 under the second
workload.
Table 3: Latency SLA and replica-minutes of Algorithm 2
(with the second workload) compared to an
overprovisioning solution and optimal autoscaler. Also
shown the results for the Linear autoscaling solution.
wsla = 500 ms, Decision interval = 1 second, µ= 200
events/sec
Second
(NYC
Taxi)
Workload
%
latency
SLA
Cost
replica-
minutes
Nb of
Scale
UP
Nb of
Scale
Down
Alg. 2 98.9 402.9 20 16
Linear 95.4 325.7 23 20
Optimal 100 414.11 20 16
Overpro-
visioning
100 600 0 0
Tail-Latency Aware and Resource-Efficient Bin Pack Autoscaling for Distributed Event Queues
59
Comparison with a Linear Autoscaling Solution.
We have also tested and compared Algorithm 2 with
a linear autoscaler. As stated before, a linear
autoscaler might miss the exact number of replicas
needed to maintain the desired latency. This will lead
to a non-latency-aware partitions-consumers
assignment performed by Kafka as the load assigned
to certain consumers might bypass the latency-
violating load. To experiment with linear autoscaler,
we configured the newly designed Controller with the
linear formula (
×
×
) using (fup, fdown) of (0.9,
0.4) to compute the needed number of replicas. As
shown in Table 2, with the first workload the bin pack
based autoscaler scored 97.4% latency guarantee at
30.21 replica-minutes while the linear autoscaler
scored 93.9% at 25.5 replica-minutes. This represents
a 3.7% improvement in the latency SLA. As shown
in Table 3, similar results were obtained with the
NYC Taxi dataset workload where the bin pack
autoscaler reached 3.
5
% increase in latency SLA as
compared to the linear autoscaling solution. This
shows that the proposed bin pack autoscaler
(Algorithm 2) achieved a better latency SLA on a
regular non skewed workload as compared to a linear
autoscaler.
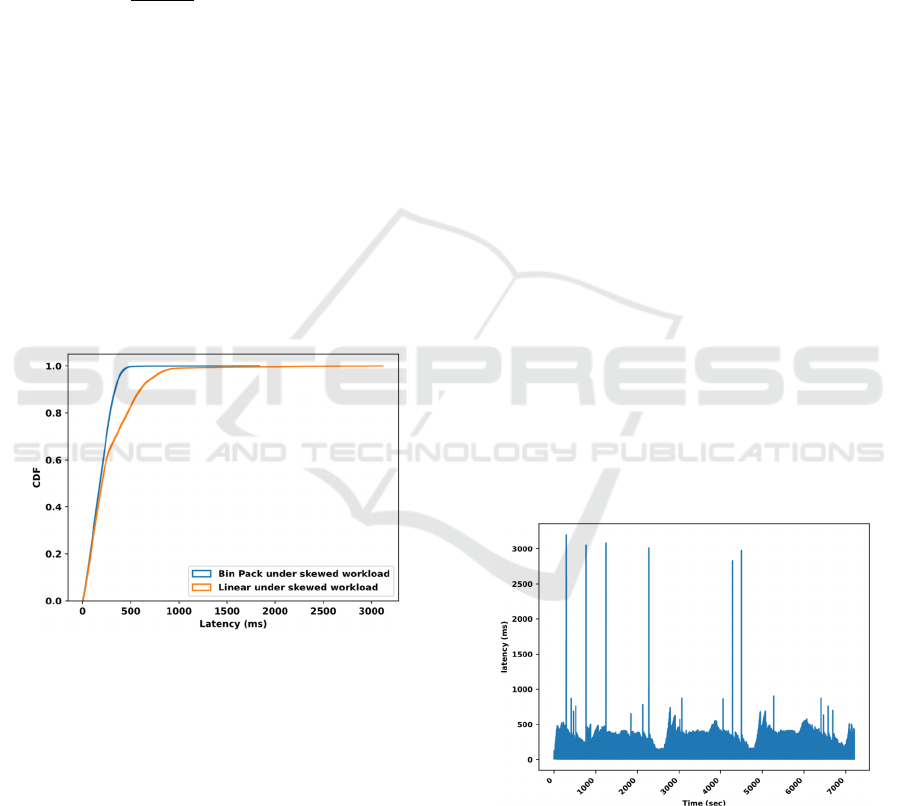
Figure 7: CDFs for the bin pack solution and Linear
solution under the first workload with skewness introduced.
Comparison with a Linear Autoscaling Solution
when the Workload is Skewed. As stated before,
linear autoscalers are not middleware-aware. That is,
they only decide to request addition or removal of
replicas to the underlying cluster manager (e.g.
Kubernetes), but they do not consider the assignment
of event consumer replicas to partitions upon adding
or removing new replicas. Rather, these autoscalers
rely on standard Kafka non-load-aware assignment
strategy for assigning partitions to consumers. This
might result in unbalanced load among the event
consumers replicas when the partitions have non
uniform arrival rate. In this context, recall that as per
Algorithm 2, partitions-consumers assignment is
load-aware. It is performed as per the result of the bin
pack assignment accomplished by the Controller.
Upon rebalancing, the consumer group leader
contacts the Controller for its recommended latency-
aware assignment and performs the assignment
accordingly. Hence, to show the advantage of
Algorithm 2 when the partitions arrival rate is non-
uniform, we have introduced skewness into our two
workloads by sending 0.5 of the event rate into the
first two partitions and the remaining 0.5 into the
other partitions. Note that in order to keep the arrival
rate into a single partition less than latency-violating
arrival rate (that is, the arrival rate at which 𝑤
is
reached), we have used a distributed queue with 9
partitions in this experiment. With the first workload,
the bin pack autoscaler scored 98.9% latency SLA at
29.8 replica-minutes while the linear autoscaler
scored 84.7 at 25.5 replica-minutes. Figure 7 shows
the CDF (cumulative distribution function) of event
latencies in both cases.
Similar results were obtained with the second
workload (NYC taxi dataset). Figure 8 shows the
event latencies when running the second workload
with skewness introduced using the bin pack
autoscaler. With our proposed bin pack autoscaler the
latency guarantee reached 99.08% at 392.15 replica-
minutes. On the other hand, the linear autoscaling
solution scored 85.9% at 329.7 replica-minutes.
These results represent more than 10% improvement
in terms of latency SLA for the bin pack autoscaler
(Algorithm 2) as compared to a linear autoscaler
when the workload is skewed.
Figure 8: Event latency of the bin pack solution under the
NYC taxi workload with skewness introduced.
5.2 Interpretation of the Resulting Tail
Latency
The results shown and discussed in the previous
section intentionally delayed a major interpretation.
CLOSER 2024 - 14th International Conference on Cloud Computing and Services Science
60
What is the cause of this variable peak latency
appearing few times in Figures 4, 6 and 8. Also, this
peak latency manifested as a tailed CDF in Figure 7.
A major observation from Figure 5 (notice the
provisioning and deprovisioning time of event
consumers) is that this peak latency is not due to scale
up action and its associated rebalancing overhead as
it does not manifest upon upscaling. Therefore, the
synchronization upon scale-up hypothesis was
eliminated. Nevertheless, one can clearly see from
Figure 5 that this peak latency appears timely with a
scale down action. Hence, it is most likely caused by
a complementary action of the synchronization
protocol that is exclusive to a scale down action.
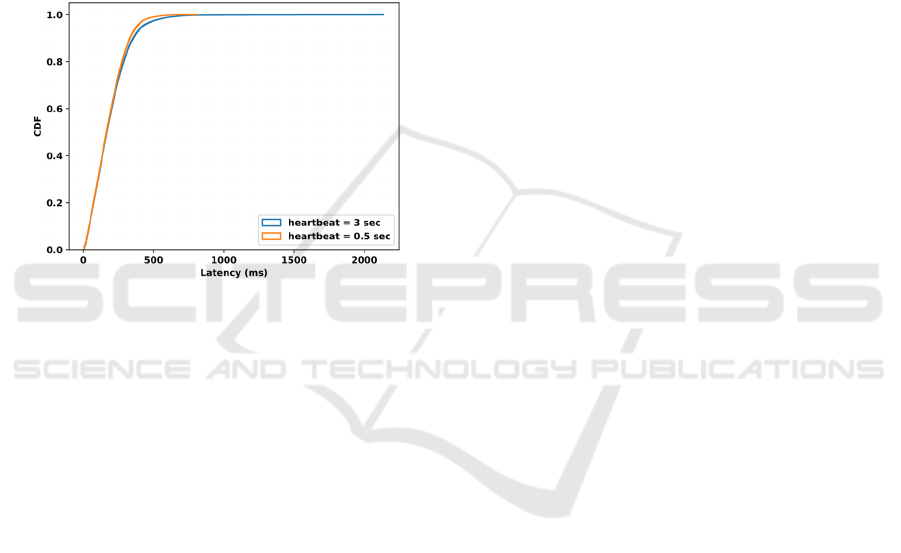
Figure 9: CDF for Algorithm 2 with the first workload
under 500 ms and 3 seconds heartbeat.
As stated in section 2, the event consumer replicas
operate in group managed by the consumer group CG
coordinator. Upon a scale action, the replicas to be
removed/added will inform CG coordinator about
their intention to leave/join the group so that the CG
starts a synchronization/assignment process. This
duration is not blocking during a scale up as the
newly added replicas do not have any assigned
partitions. However, this time is partially blocking in
case of scale down as the leaving consumers are
already assigned partitions from which they will stop
consuming as soon as they inform the coordinator
about their intention to leave. Still, even with that in
mind, a latency of up to few seconds on a scale down
is not justifiable as it will take the CG coordinator an
order of few milliseconds to inform the other event
consumers to revoke their partitions for reassignment.
Unfortunately, however, it turns out that the CG
coordinator does not instantaneously send request to
other event consumers in the group to revoke their
partitions for reassignment. In contrast, it will wait to
receive a heartbeat from the existing consumers, and
it will ask them to revoke their partitions as part of the
heartbeat response. As the default Kafka heartbeat
interval is equal to 3 seconds, the relatively high tail
latency upon a scale down is now justifiable. To
further confirm our hypothesis and eventually aiming
at reduced tail latency, we reran the bin pack
autoscaler logic (Algorithm 2) with a heartbeat
interval of 500 ms. For instance, Figure 9 shows a
CDF comparison when running Algorithm 2 under
the first workload with a heartbeat of 3 seconds and
500 ms. Notice how the 100-percentile tail latency
dropped to less than one second with a heartbeat of
500ms in the first workload. Furthermore, the
percentile of latency SLA increased from 97.4% to
98.1%. With a heartbeat of 500ms, similar results
were observed for the NYC Taxi workload where the
100-percentile tail latency dropped to less than 1
second (alas was around 3 seconds, see Figure 6, with
default value) and the percentile of latency guarantee
increased from 98.9 to 99.07 percentile.
5.3 Impact of the Rebalancing Time on
the Tail Latency
In our deployment and experimental setup, the 99
percentile of the synchronization/rebalancing time
was less than 50 ms which is lower than the desired
target latency 𝑤
. Hence, the synchronization time
did not have a large impact on the latency guarantee,
neither it did result in a large tail latency. To this end,
this section is designed to show the negative impact
of a large synchronization duration for the event
consumer group on the overall percentile of latency
guarantee. In other words, this section shows the
resulting high tail latency observed when a relatively
high rebalancing time governs the event consumer
group synchronization. In particular, the first
subsection shows the observed tail latency when
higher rebalancing time is set while no action is taken
to reduce the effect of the tail latency, that is, using
Algorithm 1. The next subsection shows how
Algorithm 2 that accounts for the rebalancing lag
upon autoscaling, can reduce the impact of the
observed tail latency at higher cost in terms of replica-
minutes. Due to space limitations, and without loss of
generality, we restrict the experiments of this section
to the first workload.
Higher Tail Latency Resulting from Higher
Rebalancing/Synchronization Time. As stated
above, the synchronization time of the event
consumer group might take up to few seconds in some
cases (e.g., when the event consumers are stateful and
state migration to remote servers is needed). Hence,
to show the impact of a larger synchronization time
on the latency guarantee, we set this latter to 500 ms
and 2 seconds. The aim is to quantify the resulting tail
Tail-Latency Aware and Resource-Efficient Bin Pack Autoscaling for Distributed Event Queues
61
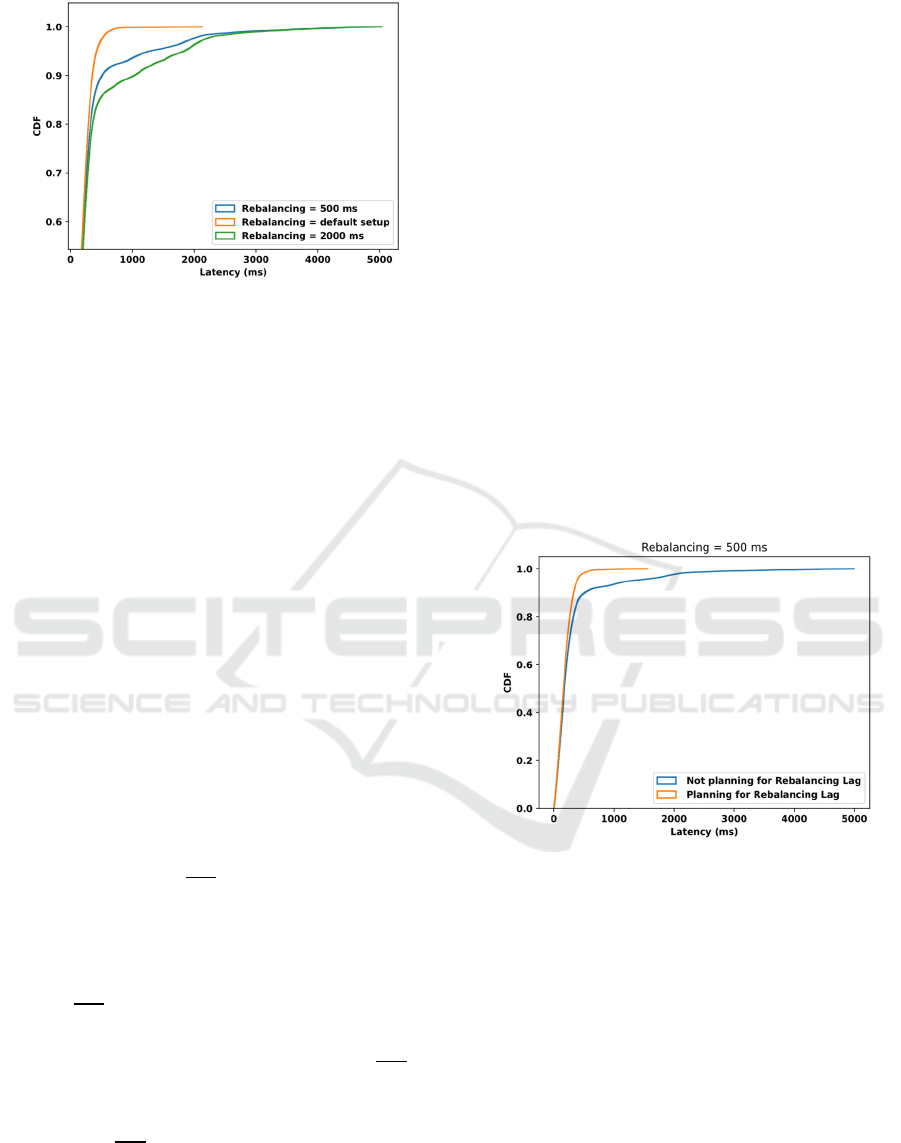
Figure 10: Resulting tail latency under different rebalancing
time when not accounting for the rebalancing lag (that is,
using Algorithm 1 instead of Algorithm2).
latency with 500 ms and 2 seconds synchronization
(rebalancing) time as to less than 50 ms. To this end,
we ran Algorithm 1 driven by the first workload in
these scenarios. Recall that, as compared to
Algorithm 2, Algorithm 1 does not account for the
rebalancing lag while planning for the number of
replicas upon autoscaling, and hence it is less resilient
to the resulting tail on rebalancing. The resulting
CDFs are shown in Figure 10: notice how the higher
rebalancing time of 2 seconds resulted in the worst-
case tail latency. Also, this tail latency was higher
with a rebalancing time of 500 ms as compared to the
default rebalancing time. For instance, the latency
SLA on a rebalancing time of 2 seconds scored 85.4%
as compared to 90.1% for the case of 500 ms
rebalancing time, and to 97.4% in the default setup
case. In the next subsection, we show how Algorithm
2 contributes to a reduction in the tail latency at higher
replica-minutes.
Before completing this section, it is worth noting
that when 𝑤
is higher than the rebalancing time 𝑡
,
that is, the fraction
is greater than 1, the
rebalancing/synchronization protocol won’t have a
large negative impact on the final percentile of
latency guarantee. On the other hand, when 𝑤
is
smaller or equal to the rebalancing time, that is, the
fraction
is smaller or equal to 1, the final
percentile of latency guarantee will be affected by the
rebalancing process. The more the fraction
is
low, the more achieving high percentile of latency
guarantee becomes costly in terms of replica-minutes.
For instance,
=0.1 means that the rebalancing
time is 10x the 𝑤
. Hence, the rebalancing process
will result in more events violating the latency SLA.
In such scenarios, Algorithm 2, will result in a higher
cost in terms of replica-minutes to maintain a low tail
latency. This is because Algorithm 2 will plan (take
into account) the relatively high number of events that
will be lagged during the rebalancing upon a scale up.
It will further restrict scale down actions till lower
arrival of events, where the lagged events upon
rebalancing become smaller thus resulting in less
latency SLA violations.
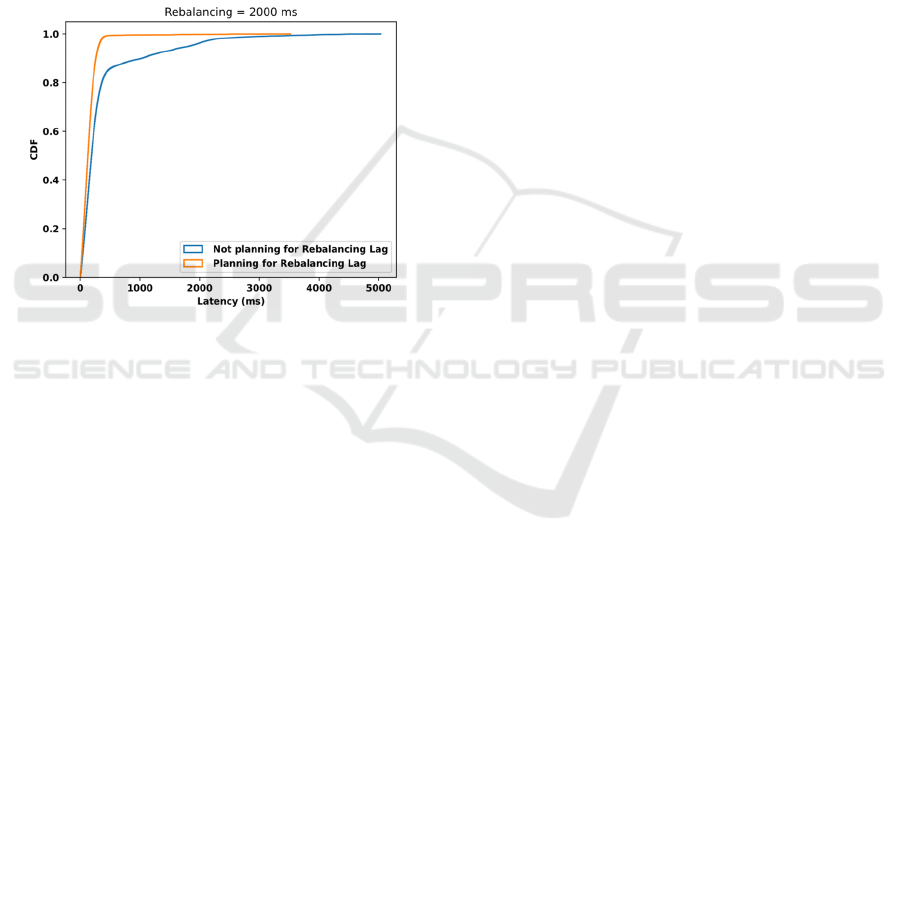
Tail Latency Reduction Using Algorithm 2
(Planning for the Events Lagged during
Rebalancing). As discussed in section 3, Algorithm
2 complements Algorithm 1 by planning for the
rebalancing lag upon replica-provisioning. This has
the benefit of better resilience in face of tail latency
resulting from rebalancing. To this aim, we repeated
the same experiments with higher rebalancing time (2
seconds, 500 ms and default) driven by Algorithm 2
instead of Algorithm 1. In essence, under a
rebalancing of 500ms, the percentile latency SLA
increased to around 98.2% with Algorithm 2 at 34.61
replica-minutes as compared to 90.1% at 33.85
replica-minutes with Algorithm 1. These results show
an increase of around 8% in the percentile latency
guarantee at 2.2% increase in replica-minutes.
Figure 11: Resulting tail latency under a rebalancing time
of 500ms when not accounting for the rebalancing lag
(Algorithm 1) vs. when accounting for the rebalancing lag
(Algorithm 2).
For the case when the rebalancing time was set to
2 seconds (that is, rebalancing =4×𝑤
), the
percentile latency guarantee increased to 99.4% at
44.7 replica-minutes with Algorithm 2 as compared
to 85.6% at 34.16 replica-minutes using Algorithm 1.
This represents around 14% increase in the latency
SLA at 30.8% increase in the cost in terms of replica-
minutes. As compared to the case when the
rebalancing time was 500 ms, notice the higher values
of both replica-minutes and latency SLA. This is
because higher rebalancing time generates higher
rebalancing lag, and thus more replicas are
provisioned to accommodate for the resulting lag
CLOSER 2024 - 14th International Conference on Cloud Computing and Services Science
62
upon a scale up. Furthermore, with higher rebalancing
time, Algorithm 2 becomes more restrictive on scale
down, as a scaling down at high arrival rates will
generate latency-violating lag. Thus, deferring
scaling down to lower arrival rates in such a way that
scale down actions would result in non-latency-
violating lag. This behaviour is desired as lower
arrival rates of events typically corresponds to
nonpeak business times which is most likely the best
time to handle the non-availability of the event
consumer group caused by rebalancing. Scale down
deferring is a default technique used in many cloud
autoscalers such as Amazon Kinesis as indicated by
in (Wang et al, 2023).
Figure 12: Resulting tail latency under a rebalancing time
of 2 seconds when not accounting for the rebalancing lag
(Algorithm 1) vs. when accounting for the rebalancing lag
(Algorithm 2).
6 CONCLUSION
We proposed a latency-aware and resource-efficient
dynamic event consumer provisioning in distributed
event queues. The dynamic event consumer replica
provisioner was modelled as a two-dimensional bin
pack problem with the Least-Loaded heuristic.
Experimental work has shown that the bin pack
solution outperforms a linear autoscaler by up to 10%
in terms of latency SLA when the workload is
skewed. Furthermore, we discussed the negative
impact of the blocking event consumer group
synchronization protocol on the tail latency. We then
proposed an extension to the bin pack autoscaler to
reduce the tail latency caused by the events
accumulated during rebalancing.
The case of dynamic event consumer
provisioning when consumer replicas have different
processing capacities, and the case of dynamic event
consumer provisioning for an event driven
microservices architecture is currently a work in
progress.
ACKNOWLEDGEMENTS
This research is funded by the enterprise HighTech
Payment Systems HPS and ANRT through a PhD
CIFRE collaboration with UniCA and CNRS I3S
laboratory.
REFERENCES
Goodhope, K., Koshy, J., Kreps, J., Narkhede, N., Park, R.,
Rao, J., & Ye, V. Y. (2012). Building LinkedIn's Real-
time Activity Data Pipeline. IEEE Data Eng. Bull.,
35(2), 33-45.
Mohammadi, M., Al-Fuqaha, A., Sorour, S., & Guizani, M.
(2018). Deep learning for IoT big data and streaming
analytics: A survey. IEEE Communications Surveys &
Tutorials, 20(4), 2923-2960.
Al-Aubidy, K. M., Derbas, A. M., & Al-Mutairi, A. W.
(2017). Real-time healthcare monitoring system using
wireless sensor network. International Journal of
Digital Signals and Smart Systems, 1(1), 26-42.
Albano, M., Ferreira, L. L., Pinho, L. M., & Alkhawaja, A.
R. (2015). Message-oriented middleware for smart
grids. Computer Standards & Interfaces, 38, 133-143.
Fernández-Rodríguez, J. Y., Álvarez-García, J. A., Fisteus,
J. A., Luaces, M. R., & Magaña, V. C. (2017).
Benchmarking real-time vehicle data streaming models
for a smart city. Information Systems, 72, 62-76.
Laigner, R., Kalinowski, M., Diniz, P., Barros, L., Cassino,
C., Lemos, M., ... & Zhou, Y. (2020, August). From a
monolithic big data system to a microservices event-
driven architecture. In 2020 46th Euromicro conference
on software engineering and advanced applications
(SEAA) (pp. 213-220). IEEE.
Xiang, Q., Peng, X., He, C., Wang, H., Xie, T., Liu, D., &
Cai, Y. (2021). No free lunch: Microservice practices
reconsidered in industry. arXiv preprint arXiv:
2106.07321.
Pallewatta, S., Kostakos, V., & Buyya, R. (2022).
Microservices-based IoT applications scheduling in
edge and fog computing: A taxonomy and future
directions. arXiv preprint arXiv:2207.05399.
Amazon Kinesis. https://aws.amazon.com/kinesis/. (2023).
Google Cloud Pub/Sub., https://cloud.google.com/pubsub/
(2023).
Microsoft Event Hubs., https://azure.microsoft.com/en-us/
services/event-hubs/ (2023).
Eaton, K., (2012.) How One Second Could Cost Amazon
$1.6 Billion In Sales. https://www.fastcompany.com/
1825005/how-one-second-could-cost-amazon-16-
billion-sales
Dean, J., & Barroso, L. A. (2013). The tail at scale.
Communications of the ACM, 56(2), 74-80.
Tail-Latency Aware and Resource-Efficient Bin Pack Autoscaling for Distributed Event Queues
63

KEDA, (2023) Kubernetes-based event-driven autoscaling,
https://keda.sh/.
Narkhede, N., Shapira, G., & Palino, T. (2017). Kafka: the
definitive guide: real-time data and stream processing
at scale. " O'Reilly Media, Inc.".
Blee-Goldman, S., (2020) From Eager to Smarter in
Apache Kafka Consumer Rebalances. Confluent,.
[Online]. Available: https://www.confluent.io/blog/
cooperative-rebalancing-in-kafkastreamsconsumer-
ksqldb/.
Ajiro, Y., & Tanaka, A. (2007, December). Improving
packing algorithms for server consolidation. In int.
CMG Conference Vol. 253, pp. 399-406).
Chindanonda, P., Podolskiy, V., & Gerndt, M. (2020). Self-
Adaptive Data Processing to Improve SLOs for
Dynamic IoT Workloads. Computers, 9(1), 12.
Qu, C., Calheiros, R. N., & Buyya, R. (2018). Auto-scaling
web applications in clouds: A taxonomy and survey.
ACM Computing Surveys (CSUR), 51(4), 1-33.
Baset, S. A. (2012). Cloud SLAs: present and future. ACM
SIGOPS Operating Systems Review, 46(2), 57-66.
Wang, Y., Lyu, B., & Kalavri, V. (2022, June). The non-
expert tax: quantifying the cost of auto-scaling in cloud-
based data stream analytics. In Proceedings of The
International Workshop on Big Data in Emergent
Distributed Environments (pp. 1-7).
Donovan, B., & Work, D. (2016). New York City taxi trip
data (2010-2013). University of Illinois at Urbana-
Champaign, 10, J8PN93H8.
CLOSER 2024 - 14th International Conference on Cloud Computing and Services Science
64
