
Making Radar Detections Safe for Autonomous Driving: A Review
Tim Br
¨
uhl
1,2
, Lukas Ewecker
1
, Robin Schwager
1,2
, Tin Stribor Sohn
1
and S
¨
oren Hohmann
2
1
Dept. of Highly Automated Driving Systems, Dr. Ing. h.c. F. Porsche AG, Weissach, Germany
2
Institute of Control Systems, Karlsruhe Institute of Technology, Germany
Keywords:
SOTIF, Radar Perception, Radar Signal Processing, Radar-Camera Fusion, Functional Safety.
Abstract:
Radar sensors rank among the most common sensors used for highly automated driving functions due to their
solid distance and velocity measurement capabilities and their robustness against adversarial environmental
conditions. However, radar point clouds are noisy and must therefore be filtered. This work reviews current
research with the aim to make radar detections usable for safe perception functions which require a guarantee
for correctness of the measured environmental representation. The impact on radar errors on the distinct
downstream tasks is explained. Besides, the term of safety for automated driving functions is illuminated under
consideration of the current standards and state-of-the-art research interpreting these standards is presented.
Furthermore, this work discusses safe radar signal processing and filtering, approaches to enrich radar data
points by information fusion, e.g. from cameras and other radars, and development tools for safe radar-based
perception functions. Finally, next steps on the way towards safety guarantees for radar sensors are identified.
1 INTRODUCTION
Autonomous driving and parking are two of the major
emerging fields in the current development of the au-
tomotive industry. In contrast to assisting functions,
the driver is not involved during autonomous func-
tions which exceed SAE level 2 (SAE International.,
2021). With this, the safety demands on elements of
the function rise significantly. This applies for both
planning and acting, but these two items will only
work properly if the sensing element performs accu-
rately. Critical situations must not be missed as falling
back on the driver is not an option anymore. The
system needs to handle a variety of tasks in the op-
erational design domain, which includes unforeseen,
probably even unimaginable situations. During devel-
opment, it needs to be ensured that these situations are
covered. Typical sensors which are used for environ-
ment perception are radar sensors, lidar sensors and
cameras (Yeong et al., 2021), which are combined to
sensor sets in case of autonomous vehicles.
Radar is an acronym for Radio Detection and
Ranging, which provides an indication on its work-
ing principle. Main parts of a radar sensor are the
Voltage-Controlled Oscillator (VCO) which gener-
ates an electromagnetic radio wave, which is trans-
mitted by a set of antennas. These radio waves reflect
in the world. The reflected waves are received by a
second set of antennas and processed to determine at-
tributes like position, signal power and relative veloc-
ity of the reflected obstacle. Initially, radar sensors
were primarily applied in military, aviation and nau-
tical fields. Meanwhile, millimeter-wave radar sen-
sors also gained a considerable proportion in automo-
tive sensor systems, starting as a sensor for assistance
systems like adaptive cruise control and safety func-
tions such as autonomous emergency braking, and
now being an enabler for autonomous driving func-
tions (Waldschmidt et al., 2021). Advantages of radar
sensors are the compact form factor, due to high inte-
gration density of components, as well as the strong
performance when it comes to measuring even high
distances as well as velocities in a single scan (Stein-
baeck et al., 2017). Common modern sensor systems
achieve a range of over 200 m with an accuracy and
resolution of 0.1m, and a velocity accuracy of 0.05
m
s
(Aptiv PLC, 2023) (Robert Bosch GmbH, 2023). The
capability of radar waves to pervade plastics as well
as even thin coating layers provides the opportunity
of integrating the sensor invisible behind the vehicle’s
bumpers. Additionally, the radar is the only sensor
showing exceptional environmental and atmospheric
robustness (Marti et al., 2019) Considering the com-
plementary of sensors, a combination of radar sen-
sors and camera sensors seems particularly promising
(Zhou et al., 2022). The major drawbacks of radar
Brühl, T., Ewecker, L., Schwager, R., Sohn, T. and Hohmann, S.
Making Radar Detections Safe for Autonomous Driving: A Review.
DOI: 10.5220/0012630400003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 299-310
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
299

sensor systems like moderate orientation measuring
capability or weak classification performance are ad-
dressed by the camera.
As lidar is an acronym for Light Detection and
Ranging, these sensors share their working princi-
ple of transmission and reception of electromagnetic
wave with the radar sensors. However, the wave-
length of lidar sensors is close to the visible part of the
spectrum and hence shorter compared to radar sen-
sors. Elementary disparities in the physical properties
of the measures come with this difference in wave-
length. Lidar sensors exceed radar sensors in spatio-
temporal consistency, meaning that data points are
very congruent in two consecutive measures of the
same scene. This is not given for radar sensors, as
the points spread and scatter along an object (Bilik,
2023). Another asset is the high lateral and, thanks
to multiple lidar scan layers, even elevational reso-
lution of the lidar point cloud. Hence, lidar sensors
are superior to radars in object detection and classi-
fication tasks. However, except for new approaches
which try to integrate the Frequency-Modulated Con-
tinuous Wave (FMCW) technique to lidars (Sayyah
et al., 2022), common lidar sensors are not capable of
directly measuring the relative velocity per point. The
achievable range of lidar sensors is slightly less com-
pared to radars. In addition, lidar sensors are heavier
and more cumbersome, which is another aspect for
automotive use cases.
Most important for the considerations of this work
is that, due to its working principle, lidar suffers from
impairments in adversarial weather conditions like
rain, snow and especially fog (Zang et al., 2019).
Looking from the perspective of safe environment
perception, that is why lidar does not qualify that well
for this task in compared to the radar sensor. Contrary
to radar sensors, lidars need a cleaning solution which
often includes washing fluid. This work aims to show
that radars have the potential to serve as sensors for
safe environmental perception even in bad lighting
and weather, if attention is paid to certain singulari-
ties during the signal processing.
2 STRUCTURE
The paper is structured as follows. At first, an
overview of current radar tasks in the field of auto-
mated driving functions is given. Next, we show the
current radar processing approaches and point out that
safety considerations are a special recess in the bunch
of radar processing methods. The term of safe radar
detections is elucidated and current literature in this
area is introduced. In this context, we highlight the
role of the two most important safety standards for au-
tomotive applications. We look at fusion techniques
with the potential to add information and reduce un-
certainty of radar points, and we describe data sets
for advancement of radar point treatment. Eventually,
we outline the results of our review, draw conclusions
and demonstrate further potential research activities.
3 LITERATURE REVIEW
The literature section review comprises the radar ca-
pabilities, a survey of radar signal processing, an anal-
ysis of error sources in radar sensors, an introduction
into the concept of safe detection, a definition of crit-
ical radar points and development approaches to alle-
viate the criticality of radar points.
3.1 Radar Capabilities
This section gives an introduction into the different
tasks in automated driving functions which a radar
can handle by today. The four presented fields of ap-
plication are depicted in figure 1.
3.1.1 Radar Localization
Currently, measurement data acquired by radar sen-
sors is mainly used for object detection (Schumann
et al., 2020)(Scheiner et al., 2021). However, new
application fields for radar offer to the research com-
munity. The property that radar measurements have
a point cloud as an output makes them suitable for
localization in already seen environments via point
cloud registration. In the past, several works dealt
with the challenge to apply Simultaneous Localiza-
tion and Mapping (SLAM) algorithms to radar data.
(Hong et al., 2021) describe a SLAM algorithm to
deal with bad weather and illumination conditions.
A blob detector finds key points in a cartesian radar
image and detections on moving vehicles are deleted
by a graph-based outlier detection algorithm. The
key points are tracked, and motion is compensated
using a pose graph. After every measure, the min-
imally required number of features is completed by
adding new features in case that some were lost dur-
ing the last tracking cycle. The loop closure is done
by comparing candidates in a Principal Component
Analysis (PCA) and rejecting the least likely ones.
Comparable performance to vision-based and lidar-
based approaches was achieved. Similar work was
done by (Schuster et al., 2016), who used an occu-
pancy grid based key point extractor and constructed
a graph, adding poses as well as odometry measures
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
300
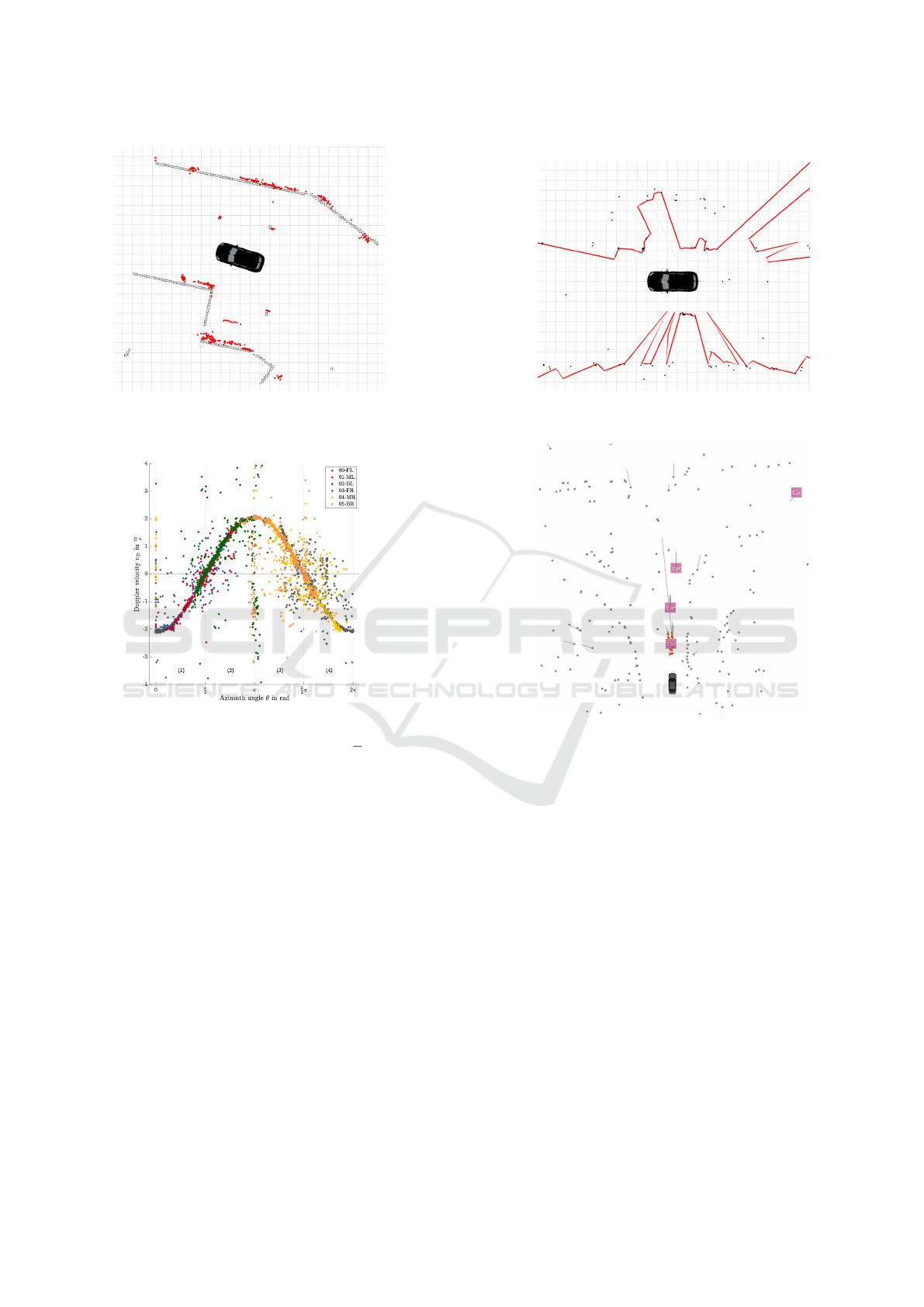
(a) Matching radar point clouds (red dots) to map
data (black structure) for localization purposes
(b) Radar free space detection (red line) based on
radar points (black dots)
(c) Radar odometry, doppler velocity of radar
points at constant vehicle speed of v = 2.0
m
s
(d) Radar object detection and tracking (Schu-
mann et al., 2021)
Figure 1: Different application fields for radar sensors.
of the vehicle. The outliers are detected with the
Random Sample Consensus (RANSAC) algorithm in
this work. The graph is optimized using Levenberg-
Marquardt-optimization.
3.1.2 Radar Free Space Detection
Another field of frequent research activity is radar free
space detection. This can also be considered as the
inverse problem of the detection of static obstacles in
the surrounding of the sensor. The Radar Cross Sec-
tion (RCS) is proportional to the backscatter signal
power density (Knott, 2012), meaning that a higher
RCS increases the peak of the detection in the noise
floor. Hence, given that the backscatter power is not
constant, but normally distributed, the probability that
the object is detected increases as well. The proba-
bility to receive a backscatter signal and the average
signal power depends on the RCS of the object which
is measured (Knott, 2012). A typical approach to find
drivable space is to discretize the environment to oc-
cupancy grids, filling cells with reflections which fea-
ture reflections, and leaving out the ones without re-
flections (Xu et al., 2020)(Li et al., 2018). Due to
the noisiness of the radar point cloud, filtering algo-
rithms are applied to reduce the false positive rate of
the boundary detection. (Popov et al., 2023) tackle
the problem of free space detection by a deep neural
network, whose input is a radar point cloud which is
accumulated over a time of 0.5 s, ego-motion compen-
sated, and projected in a 2D bird’s-eye-view format.
Human-annotated bounding boxes based on lidar de-
tections are used as the training data. The network
features not only a free space segmentation head, but
also a bounding box detection and a classification.
Making Radar Detections Safe for Autonomous Driving: A Review
301

3.1.3 Radar Odometry
Recent approaches showed that radar sensors can also
be used for motion estimation due to their ability to
precisely determine the Doppler velocity. Assuming
that most of the perceived targets are stationary, the
reflections from these points can be used, together
with the angular information, to estimate the longi-
tudinal and lateral velocity as well as the yaw rate
of a vehicle. (Kellner et al., 2014) showed the fea-
sibility of this approach and investigated the preci-
sion improvement when using multiple radars. The
geometric coherence between the measurement is de-
rived and based on that, the vehicle’s motion state is
estimated, using the Ackermann conditions. Radar
odometry can be tackled on a second way, which is
closer to the SLAM approach described before. Point
clouds can be matched and the vehicle’s motion is the
first derivative of the pose transform, the transforma-
tion between two successive point clouds. The work
of Adolfsson et al. proposes a conservative filtering
approach which keeps only a set of the strongest radar
detections with constant size. Additionally, it is as-
sumed that true positives represent objects with a sur-
face. Thus, a surface vector is estimated for every
radar point. The points with a surface vector corre-
lating only weakly with the other points are deleted.
The thinned-out point cloud is registered to the previ-
ous one using the Broyden-Fletcher-Goldfarb-Shanno
(BFGS) line search method (Adolfsson et al., 2021).
3.2 Radar Signal Processing
Radar errors may also happen in the digital signal pro-
cessing steps and should be prevented here as best as
possible. Modern radars send FMCW waveforms and
determine the range of a target point and its relative
velocity by the frequency shift of the received sig-
nal (Patole et al., 2017). The whole radar signal pro-
cessing is a many-layered process, starting with in-
terference mitigation, fast-fourier transformation and
beamforming in the preprocessing step, followed by
the creation of the target list (Engels et al., 2021).
In this step, a Constant False Alarm Rate (CFAR)
mechanism is often applied to determine the thresh-
old for a signal peak to be considered as a target
point. The peak’s position allows for calculation of
the other point attributes, the so-called parameter es-
timation (Engels et al., 2021). The resulting point
cloud is the basis for all the applications which were
described before, such as object detection or local-
ization. However, the techniques described in sec-
tion 3.1 all try to achieve a regularly working result,
filtering the point cloud and keeping only strong re-
flections while accepting to ignore weak reflections
of objects in favor of a low false positive rate. These
filtering methods are not sufficient when undercutting
low failure in time rates must be guaranteed. In the
following, an overview of techniques in the state-of-
the-art for guaranteeing safe perception is given. For
this section, we state the term of the Object of Inter-
est (OoI), which can be both an object which should
be detected during an object detection or free space
estimation task or an arbitrary object with backscat-
tering, generating at least one true positive point, that
is considered for measures of radar odometry or lo-
calization.
3.3 Radar Hardware Development
Starting in front of the chain, it needs to be ensured
that the OoI generates at least one point in the point
cloud. This requires a sufficiently strong backscat-
ter signal which exceeds the required threshold. The
radar sensor itself is accountable for parts of the over-
all perception performance. (Gerstmair et al., 2019)
show that phase noise in the transmitted signal caused
by the voltage controlled oscillator plays a significant
role for the signal-to-noise ratio. If phase noise can be
kept on a minor level, Vulnerable Road Users (VRUs)
such as pedestrians elicit reflections which exceed the
noise floor level, while a poor phase noise can lead
to a pedestrian masked by the noise floor. Further-
more, they outline methods to estimate the power
spectrum density of the phase noise and monitoring
approaches using a cascaded Monolithic Microwave
Integrated Circuit (MMIC) system. Since the inter-
ference phenomenon may also lead to a decreased
signal-to-noise level, other works consider its mitiga-
tion. (Aydogdu et al., 2020) discuss the effects of in-
terference and propose proactive strategies, proactive
meaning to avoid or reduce interference. These works
are undoubtedly relevant to reduce the occurrence of
false negative points, existing objects of the environ-
ment which are not represented by a radar target point.
However, they do also not focus on the safety-aware
selection of radar points. Hence, in the following, the
methods to treat the radar points which are returned
by the sensor for consecutive purposes shall be dis-
cussed.
3.4 Origin and Classification of False
Radar Points
Radar point clouds are noisy, meaning that they con-
tain points which do not represent an OoI. (Bilik et al.,
2019) names clutter as a reason for noisiness and a
major challenge for radar signal processing. Clutter
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
302

points are road echoes in front of the vehicle which
are barely distinct from signal returns of OoIs. Mul-
tipath clutter is described as another effect which
can obscure true positive targets due to the doppler
spread effect (Yu and Krolik, 2012). On the other
hand, this may cause false positive radar points as
well. The impact of these false points has been de-
scribed in various works in the past. (Barnes and Pos-
ner, 2020) explains a method to identify those radar
points which are robust enough to serve as key points
for tasks such as motion estimation or localization.
A U-Net like architecture is used and trained based
on ground-truth transformation between consecutive
point clouds. The output of this network is the loca-
tion and quality of the key point as well as a unique-
ness attribute. The drawback of this approach is that
the selection of key points might be suitable for the
scan matching task, whereas the selection decisions
are not explainable.
In general, to make radar points safe and discover
potential unsafe points, it needs to be expounded what
safety is and which mechanisms in perception impair
the safety of the function.
3.5 What Is Safety?
One established safety concept is Functional Safety
(FuSa), which is described by the ISO 26262 stan-
dard (International Organization for Standardization,
2018). FuSa means that electrical systems need to
fulfill safety guarantees depending on their potential
to injure their user. The safety goals to avoid mal-
function in a situation are harder, the more likely the
user is exposed to a situation, the worse the situation
is controllable and the more severe resulting injuries
at a malfunction are. In automated driving functions,
it turned out that FuSa, originally thought as a con-
cept for hardware flawlessness, cannot be applied well
for malfunctions which are caused by poor perception
capabilities or misbehavior of an algorithm. Hence,
the Safety Of The Intended Functionality (SOTIF)
standard was defined, which amplifies safety defini-
tions and targets to provide a description for these
cases. According to (International Organization for
Standardization, 2022), SOTIF is defined as the “ab-
sence of unreasonable risk due to hazards resulting
from insufficiencies of the intended functionality or
by reasonably foreseeable misuse by persons”, which
must be guaranteed for autonomous driving functions.
(Peng et al., 2023) name two classes for risks
of autonomous functions, external risk and internal
risk. Safe radar perception focuses mainly on exter-
nal risks, meaning that e.g., velocities and positions of
adversarial road participants are not determined cor-
rectly. In contrast to this, internal risk describes the
probability that an algorithm performs erroneously,
and external measurements are appropriate. Further-
more, they establish the term “SOTIF entropy” based
on the Shannon entropy, which describes the uncer-
tainty of a label prediction in an object classification
task. This entropy can be determined for perception
as well as for prediction and planning.
Ensuring that autonomous vehicles make safe de-
cisions, the term “safety” can be interpreted in dif-
ferent ways. (Bila et al., 2017) (Muhammad et al.,
2021) name different tasks such as collision avoid-
ance, detection and tracking of vehicles or pedestrian
detection. Mastering each of these tasks will lead to a
safe autonomous driving function. Additionally, they
highlight the existence of the three stages measure-
ment, analysis, and execution. Each stage of this so-
called cognitive control cycle can impair the safety of
the function.
(Khatun et al., 2020) combines the two concepts
of SOTIF and FuSa by a scenario-based hazard analy-
sis and risk assessment (HARA). Hazards can emerge
as vehicle-based or functional malfunction, cover-
ing typical FuSa parts as well as SOTIF parts of the
safety contemplation. Scenarios can result from both
branches and are preselected. To rate the risk, the
three criteria of FuSa are employed. Hazard and Op-
erability (HAZOP) keywords are collected and trans-
ferred to SOTIF functional imperfections. Various
works (Chu et al., 2023)(Peng et al., 2021) empha-
size that dealing with uncertainties is an inevitable
part when it comes to making automated functions
safer. (Dietmayer, 2016) categorizes uncertainties in
determining the state (i.e., position, orientation, mo-
tion state etc.), the existence (presence detection) and
the classification of an OoI.
3.6 Safety-Aware Function Evaluation
The review of (Hoss et al., 2022) discovers test-
ing methods to ensure methodically that functions
meet the safety requirements. They describe metrics
to measure relevance of certain scenarios, introduce
ways to specify scenarios as well as the Operational
Design Domain (ODD) and propose to create a test
catalog on either a knowledge-driven, a data-driven
or a hybrid way. Furthermore, it is outlined how to
acquire data for safety evaluation through different
ways, either by the vehicle-under-test itself or by us-
ing data which is received e.g., via vehicle-to-X.
Solving tasks such as object detection with ma-
chine learning methods is problematic due to their
black-box characteristics and lacking measure of un-
certainty of the decision made. However, one work
Making Radar Detections Safe for Autonomous Driving: A Review
303
shows how to apply SOTIF on these methods using
the example of a lane keeping function (Abdulazim
et al., 2021). They use a baseline model for the func-
tion which consists of a filter block, a memory unit,
and a predictor. Trigger events for a safety-critical
scenario are defined and tested during the verification
process. The verification and validation process hap-
pened on both a synthesized data set and a data set
recorded by a real vehicle during a road test. Sum-
marizing, the work offers a guideline on how to apply
SOTIF concepts on machine learning methods, and
describes the procedure in a very simplified example.
As mentioned before, evaluation of the automated
function should already take place on the perception
stage, since failures in the perception affect all down-
stream algorithms. One way to identify the threats of
perception functions is to dissect the event chain dur-
ing perception, consisting of the information recep-
tion and information processing (Philipp et al., 2020).
Errors, leading to failure, can occur in the raw scan as
well as in the feature level. The work focuses on fea-
ture level errors and thus it lacks a detailed analysis of
the radar sensor disturbance and failure mechanisms.
Sch
¨
onemann outlines a procedure to ensure safe
behavior of an autonomous function, in this case the
Automated Valet Parking (AVP) function, already in
the function design. He splits his observations in three
aspects: the minimum safety requirements define the
situations which an automated function should be able
to handle, the minimum required perception zone de-
fines the free space needed to monitor to set the vehi-
cle in a safe state, i.e., from driving to standstill, and
the minimum functional requirements, deviating ele-
ments such as perception or planner for the automated
function to work (Sch
¨
onemann, 2019).
Chu et al. made valuable work in the field of con-
necting SOTIF with perception challenges. Same to
Sch
¨
onemann, they also use the safety distance con-
cept to model a minimum required perception area.
They derive the velocity of objects near to the vehi-
cle to become a potential collision candidate. Addi-
tionally, they connect these findings to a sensor model
with uncertainties to identify the required capabili-
ties of the perception system for collision avoidance.
Weaknesses in the coverage of the considered sen-
sor set were identified during a case study, and they
also suggest including degrading conditions regard-
ing lighting and weather or to apply the ideas to more
complex tasks (Chu et al., 2023).
3.7 Definition of Critical Radar Points
The previously introduced works define the safety
term and enable applying it to the perception of radar
systems. We emphasize that the ignorance of a radar
point can lead to a safety hazard as well as misinter-
pretation or wrong assessment of a situation. How-
ever, as false positive radar points occur abundantly,
filtering needs to be done while being aware of the
hazards this brings along. Commonly known and
widespread are the terms to define the fraction of
points which are relevant from the given data set,
precision, and the fraction of points which are cov-
ered from the total relevant object set, recall (Powers,
2011)(Sun et al., 2023). Precision and recall are de-
fined as
Precision =
T P
T P + FP
(1)
Recall =
T P
T P + FN
(2)
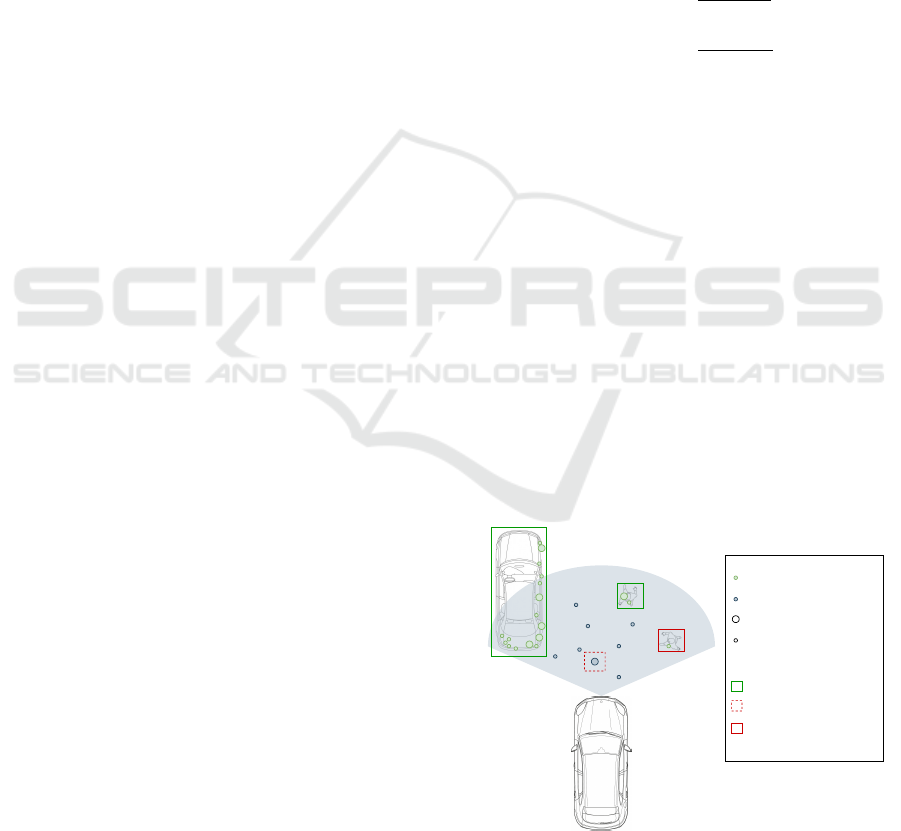
See figure 2 as an explanation of how the terms
are used in this context. The grey, transparent area
shows the field of view of a radar sensor. The
backscatter of the car on the left hand side gener-
ate strong detection points, same for the posterior
walker. These two objects would be considered as
true positives. The anterior walker (”On-edge ob-
ject”) generates only one weak detection. Assuming
that weak detections are filtered, this object would
be a false negative. Whereas some clutter from the
ground generates strong detections and is likely to
be interpreted as an obstacle, illustrated by the red-
dashed box. Lowering the threshold for detections to
count as ”strong” would include the on-edge object,
but also clutter from the ground. In succession, recall
increases and precision declines. The reverse effect
happens if the threshold is elevated. The on-edge ob-
ject is not included in the object list anymore and also
the false positive clutter is sparser.
False Positive Point
True Positive Point
On-edge Object
Weak detection
False Positive Object
True Positive Object
Strong detection
Figure 2: Tradeoff between recall and precision.
This tradeoff has been described elaborately in
the literature (Buckland and Gey, 1994)(Yang et al.,
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
304

2019). With reference to radar points, in urban sce-
narios with increased multi-path propagation, much
interference by other vehicles and many objects, the
noise level is high compared to free field scenarios.
Additionally, pedestrians may have a RCS of 0.01m
2
(Chen et al., 2014), which is a thousand or less of the
RCS of the truck next to them (Waldschmidt et al.,
2021). As VRUs with low RCS do hardly backscat-
ter and may vanish in the noise floor, a recall of 1.0
will not be reached, even if every point delivered by
the radar sensor is considered. Hence, increasing the
maximum recall rate is a main working field for radar
specialists. Still, optimizing the recall rate will in-
volve more false positives, which is to the disadvan-
tage for the precision rate. We assume that a certain
precision rate needs to be reached to ensure that the
function is robust enough to master most of the situ-
ation without undergoing a deadlock, i.e., too many
false positives are detected in crowded situations and
the vehicle does not move anymore. Enriching radar
points which may be a threat for SOTIF conformity
with information may be one of the keys. This infor-
mation can descend from other sensors such as cam-
eras or radar sensors.
3.8 Camera-Radar Fusion
Fusion is the combination of information from more
than one source, utilizing the redundancy and the
congruence of data. According to (Khaleghi et al.,
2013), it can be distinguished between four different
fusion problems: imperfection, correlation, inconsis-
tency, and disparateness. Speaking about adding in-
formation to radar point clouds via fusion, especially
two aspects are relevant. The radar data may be de-
ficient (imperfection) or miss information (inconsis-
tency). Correlation could become problematic if the
data from two sensors of a kind or the data of one
sensor at different time stamps shall be incorporated
in the fusion. Attributes that are usually fused, such
as position and velocity, don’t exhibit a disparity be-
tween different perception sensors.
(Tang et al., 2022) highlight that the use of camera
information is beneficial to use for fusion with radar
sensors due to its complementarity. Moreover, they
propose different fusion schemes, e.g., object fusion
before and after tracking and region-of-interest based
fusion. However, their work does not concern about
early fusion stages such as fusion at the level of radar
detection points or camera pixels, but aim to solve the
task of object detection for radar and camera data sep-
arately before fusing the object lists.
The fusion in these levels is explained more pre-
cisely in (Zhou et al., 2022). Data-level fusion ex-
tracts the features and generates the object list from
the fusion of radar and camera data. Target-level
fusion extracts the features separately and combines
these features together. The structure called decision-
level fusion in their work is an object fusion which is
similar to a fusion before tracking. Furthermore, the
transformation of radar points to camera pixels, the
camera calibration required to that end, and the syn-
chronization process is discussed. Feature level fu-
sion is recognized as commonly used due to the erro-
neousness of radar point clouds. Thinking about safe
radar detection points, this may pertain for most non-
critical areas, while a fusion level at an earlier stage
might be beneficial to keep the precision rate high.
(Velasco-Hernandez et al., 2020) mention that
deep learning plays a major role for multi sensor ob-
ject detection and fusion. According to (Zhou et al.,
2020), deep learning architectures can be split into
a two-stage detection network, where the radar as-
sumes the task of a region proposal network in a
deep learning image-based object detection algorithm
such as (Girshick, 2015)(Brazil and Liu, 2019), and
a one-stage detection network which solves the ob-
ject detection task inside of the image separately
and projects radar points in the 2D front camera im-
age, generating a sparse radar image (John and Mita,
2019). (Zhou et al., 2020) also name special attention
fusion (SAF) which can be combined with the already
known Fully Convolutional One-Stage Object Detec-
tion (FCOS) framework in a one-stage detection net-
work manner for the purpose of radar-camera-fusion.
The SAF block is a modified ResNet-50 block which
is applied on a radar image and results are multiplied
with those of the vision branch. By this means, the
training can be performed end-to-end (Chang et al.,
2020).
While the attention mechanism is applied to con-
trol how deep learning image recognition works, the
attention focuses purely on the presence of radar
points, not evaluating if these radar points can be haz-
ardous or relevant for the downstream automated driv-
ing function. Prior aspiration for the method is to
reach a high average precision on data sets, leaving
out safety aspects for the fusion.
3.9 Multi-Radar Fusion
The work on the fusion of multiple radar point clouds
which are generated by different sensors of a radar
belt configuration at a vehicle is not as widespread,
compared to camera fusion. The reason might be that
the fusion can be trivial, aggregating points of all sen-
sors to a common point cloud, as it was also done in
data sets like (Schumann et al., 2021). However, the
Making Radar Detections Safe for Autonomous Driving: A Review
305

distribution of detections can be interesting for safety
aspects. Speaking about the identification of false
positive points, the probability of a point being false
positive reduces significantly if a second radar raises
a detection one cycle later in the same area. (Diehl
et al., 2020) handle multi-radar fusion by transferring
all measurements to a grid representation, modeling
the sensor uncertainties by 2D gaussian distributions.
The tracking can also be done in this grid represen-
tation using multiple particle filters. (Li et al., 2022)
shed light on the temporal relations between consec-
utive radar frames. Two frames, called current frame
and previous frame, are both passed through a back-
bone neural network to extract features. A filter layer
selects object features, and the feature matrices of
multiple object candidates are passed to the tempo-
ral relational layer, which encodes object spatial posi-
tions with the features of the two consecutive frames.
Eventually, a decoding step leads to the object list rep-
resentation. The achieved results exceeding the state-
of-the-art show the importance of temporal informa-
tion in radar data.
Overlapping fields-of-view in a radar belt offer the
opportunity to attain more information about a spe-
cific region of interest. Imagine a point that has a low
signal strength and is hence considered to be deleted.
If it is identified as being a critical point, multiple oc-
currences of backscatter in the same region at previ-
ous time steps can help to amplify evidence on the
existence of the point.
3.10 Data Sets
(Yurtsever et al., 2020) review a couple of data sets,
listing lighting conditions, weather conditions and
recorded data, but do not show which of the data sets
include radar data. For this paper, their work is taken
as a basis for an own small review about current data
sets which promote the development of radar data
processing algorithms. The results can be found in ta-
ble 1, and the most important data sets are explained
in the following passage.
The Oxford Radar RobotCar data set provides
radar point clouds in urban environment together with
a lidar point cloud and six cameras, indeed they used
a Navtech CTS350-X which is a 360-degree scanning
radar without doppler information and holds proper-
ties different from a belt consisting of multiple radars,
as it is conventionally used in today’s automotive in-
dustry (Barnes et al., 2020).
(Schumann et al., 2021) encounter this issue and
serve RadarScenes, which features a point cloud cap-
tured by four radar sensors and doppler velocities.
Additionally, all points are manually labeled, which is
to our knowledge unique for a radar data set. Unfortu-
nately, the radar sensors cover only the front and sides
of the vehicle, but no rear area. RadarScenes works
well when multi radar fusion shall be investigated, but
is not useful for radar-camera fusion. NuScenes is one
of the most popular radar data sets, featuring drives in
Boston and Singapore, six camera perspectives and
point clouds from five radars. Additionally, the 3D
ground truth bounding boxes are available (Caesar
et al., 2020). Although this data set has a compara-
tively large size, it does not feature a lot of hazardous
situations. RADIATE is a radar data set which puts
special effort in including bad weather and lighting
conditions such as night, snow, and rain, but unfortu-
nately lacking 3D annotations (Sheeny et al., 2021).
We ascertained that there are various data sets
which are made for the development of autonomous
driving functions. However, we could not find a data
set which addresses safety critical scenes only. This is
a substantial lack in research, since improving fusion
algorithms on the existing data sets will not necessar-
ily improve the performance of the system handling
safety-critical situations. We suggest evaluating the
methods on data of the own system and putting effort
in a general description of how to make sensor setups
safe by identifying their individual weaknesses.
Using own data requires to record ground truth
data in parallel as a reference. Generally, annotated
data must be highly precise, and labels need to be
complete (Xiao et al., 2021). The ground truth data
must hold significantly more details than the system
which is under development. For tasks like object
or occupancy detection, 3D bounding boxes represent
the ground truth. As 3D bounding box labeling by
hand is tedious, Lee et al. propose to use 3D object
detectors applied on a lidar point cloud to generate
labeling proposals while the annotator’s only task is
to select the individual instances (Lee et al., 2018).
The lidar setup for own ground truth generation de-
pends on the task, but the setups of the vehicles used
to generate data sets (Caesar et al., 2020) (Geyer et al.,
2020) can serve as a source of inspiration. Looking
to other radar tasks such as odometry or SLAM, the
ground truth is a motion measurement respective a
pose. (Maddern et al., 2020) describe the procedure
to post-process raw Global Positioning System (GPS)
data and data from an inertial measurement unit to re-
ceive a centimeter-accurate representation of the vehi-
cle’s movements and positions during the data record-
ing. Techniques like these allow for comparison be-
tween distinct algorithm modifications.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
306

Table 1: Recent data sets of autonomous driving including radar data.
Data Set Author and Year Radar Sensors Advantages Drawbacks
NuScenes (Caesar et al., 2020) 5x Continental • calibrated camera data provided • radar points sparse in near range
ARS 408-21 • lidar data provided • vacant spots at side of the vehicle
(2Tx/6Rx) ea. near/far • variance of situations
Oxford Radar RobotCar (Barnes et al., 2020) 1x Navtech CTS350-X • lidar data included • no conventional multi-radar setup
• odometry data included • no radar point cloud provided
• stereo-camera images provided • no annotations provided
RadarScenes (Schumann et al., 2021) 4x 77 GHz corner radar • semantic class annotation per radar point • no 360° radar
• documentary camera only
RADIATE (Sheeny et al., 2021) 1x Navtech CTS350-X • focus on adversarial weather conditions • no conventional multi-radar setup
• lidar data provided • no radar point cloud provided
• no 360° camera coverage
• no annotations provided
CARRADA (Ouaknine et al., 2021) 1x 77 GHz radar • good camera images provided • no 360° radar/camera view provided
(2Tx/4Rx) • range/azimuth annotations provided • only static scenes
• numerous VRUs in object selection • 4 GHz sweep used
RADDet (Zhang et al., 2021) 1x AWR1843-BOOST • annotations per radar point available • no adversarial weather conditions
(3Tx/4Rx) • stereo-camera images provided • only static scenes
• only one radar
CRUW (Wang et al., 2021) 1x TI AWR1843 • camera-only annotations provided • no 360° radar/camera view provided
(3Tx/4Rx) • camera-radar-fused annotations provided • no radar point annotations provided
• good distribution of various road types • no adversarial weather conditions
K-Radar (Paek et al., 2022) 1x 4D radar 77GHz • 4D tensor with elevation information provided • only one radar
• lidar data provided • no radar point annotations provided
• 360° camera data provided
• good road type and weather distribution
4 DISCUSSION
As this work points out, the potential of radar sen-
sors for automated driving and parking functions is
notable. When it comes to environmental perception
in poor weather and illumination conditions or mea-
suring the relative velocity of an object in a direct
manner, there is no way around this technique.
However, while a large volume of works addresses
the overall performance and accuracy of e.g., SLAM
or object detection, there is minor research focused
on how radar sensors could provide error guarantees.
It can be stated that rethinking needs to happen in
the signal processing, where the works comprised in
this survey rely on simple probabilistic filtering meth-
ods. such as CFAR. At this, sensors stay behind their
potential in radar target detection, since a criticality-
based threshold adaption would outperform targeting
constant false alarm rates. Failure can already occur
by mistakes in the hardware design. Thus, the possi-
ble error sources must be investigated during the de-
sign process, as this paves the way for a general eval-
uation of failure rates.
The safety term got extended recently by the SO-
TIF definition, and various work is done to describe
hazard analyses. However, the perception elements
are hardly included in these considerations. Concepts
like the safety distance are a meaningful foundation,
but propagation through the whole perception task,
respecting the radar specifics, still needs to be done.
It is essential to process radar points differently and
to make the difference not with the probability of the
situation, but with its effect, especially regarding the
harm of VRUs. A raw point in front of the vehicle in
its passage route needs to be treated completely dif-
ferent than a raw point behind the vehicle, which will
not be hit in the near future. Not many works respond
to this new point of view, as the survey showed.
Handling the still enormous amount of potentially
critical raw points will only be possible by consider-
ing data of more than one sensor. The fact that re-
search is still at its beginning is reflected in the small
number of works which were presented for such sen-
sor fusion algorithms which aim at providing better
safety. While a lot of works focus on improving the
overall detection performance and stability, none of
the works try to confirm or disprove the object exis-
tence at locations of radar points, which could advan-
tageously be approached by radar-camera fusion or
multi-camera fusion.
The sparseness of work on this area continues
when it comes to suitable data sets for the develop-
ment of such algorithms. We did not find one radar
data set containing critical road situations only. It is
desirable to have a data set containing different corner
case scenarios including critical scenarios with VRUs
for radar sensors, in diverse weather and illumination
conditions, with the most important perturbing effects
included. Data should contain radar data as a point
cloud, calibrated camera data, annotated 3D bound-
ing boxes, and vehicle odometry to infer the position
from the starting point.
The new standards which are resumed in this pa-
per show that level 3 or level 4 automated functions
will not find their way to the road without an approval
with a pervasive failure-in-time guarantee as the most
important component. This guarantee requires a new
way to process data of the perception sensors, such as
Making Radar Detections Safe for Autonomous Driving: A Review
307

radar, lidar or cameras. If no special action for such
systems is taken at the beginning of the design pro-
cess, long time before verification and validation of
these systems become imminent, the approval will be
almost impossible.
5 CONCLUSION AND OUTLOOK
In this paper, we pointed out the notable potential
which radar sensors show to promote automated driv-
ing functions. The diversity of tasks which can be
tackled by radar sensors is shown, making their usage
attractive. Next, the current progress in the area of
radar hardware development and signal processing is
shown. These works serve as a basis for the consec-
utive inspection of safety-aware radar data process-
ing. To explain the line of reasoning, we scrutinized
interpretations of the safety term in context of auto-
mated driving functions. The role of critical false pos-
itive radar points was highlighted. Selected, safety-
focused works in the field of function evaluation were
investigated to work out how the perception data can
be connected to the criticality of scenarios. As en-
richment of data points with information is indispens-
able to declare their significance, the area of sensor
data fusion is illuminated. Radar-camera fusion and
multi-radar-fusion were especially emphasized in this
survey. We ended with giving an overview about cur-
rent radar data sets and rate them with respect to the
usability for safety-aware function development.
It is recognized that future work should be done
investigating the impact of erroneously filtered posi-
tive radar points on the individual tasks described in
this work. A method to identify critical situations is
important to control enriching the right regions with
additional information, originating e.g. from camera
setups. Pursuing these aspects will bring the research
community one step closer to perception which is safe
under a guarantee.
REFERENCES
Abdulazim, A., Elbahaey, M., and Mohamed, A. (2021).
Putting Safety of Intended Functionality SOTIF into
Practice. Technical report, Warrendale, PA.
Adolfsson, D., Magnusson, M., Alhashimi, A., Lilienthal,
A. J., and Andreasson, H. (2021). CFEAR Radaro-
dometry - Conservative Filtering for Efficient and Ac-
curate Radar Odometry. In 2021 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS), pages 5462–5469. ISSN: 2153-0866.
Aptiv PLC (2023). Gen7 radar family.
Aydogdu, C., Keskin, M. F., Carvajal, G. K., Eriksson, O.,
Hellsten, H., Herbertsson, H., Nilsson, E., Rydstrom,
M., Vanas, K., and Wymeersch, H. (2020). Radar
Interference Mitigation for Automated Driving: Ex-
ploring Proactive Strategies. IEEE Signal Processing
Magazine, 37(4):72–84.
Barnes, D., Gadd, M., Murcutt, P., Newman, P., and Posner,
I. (2020). The Oxford Radar RobotCar Dataset: A
Radar Extension to the Oxford RobotCar Dataset. In
2020 IEEE International Conference on Robotics and
Automation (ICRA), pages 6433–6438. ISSN: 2577-
087X.
Barnes, D. and Posner, I. (2020). Under the Radar: Learn-
ing to Predict Robust Keypoints for Odometry Estima-
tion and Metric Localisation in Radar. In 2020 IEEE
International Conference on Robotics and Automation
(ICRA), pages 9484–9490. ISSN: 2577-087X.
Bila, C., Sivrikaya, F., Khan, M. A., and Albayrak, S.
(2017). Vehicles of the Future: A Survey of Research
on Safety Issues. IEEE Transactions on Intelligent
Transportation Systems, 18(5):1046–1065.
Bilik, I. (2023). Comparative Analysis of Radar and
Lidar Technologies for Automotive Applications.
IEEE Intelligent Transportation Systems Magazine,
15(1):244–269.
Bilik, I., Longman, O., Villeval, S., and Tabrikian, J. (2019).
The Rise of Radar for Autonomous Vehicles: Signal
Processing Solutions and Future Research Directions.
IEEE Signal Processing Magazine, 36(5):20–31.
Brazil, G. and Liu, X. (2019). M3d-rpn: Monocular 3d
region proposal network for object detection. In Pro-
ceedings of the IEEE/CVF International Conference
on Computer Vision (ICCV).
Buckland, M. and Gey, F. (1994). The relationship between
Recall and Precision. Journal of the American Society
for Information Science, 45(1):12–19.
Caesar, H., Bankiti, V., Lang, A. H., Vora, S., Liong, V. E.,
Xu, Q., Krishnan, A., Pan, Y., Baldan, G., and Bei-
jbom, O. (2020). nuscenes: A multimodal dataset for
autonomous driving. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion (CVPR).
Chang, S., Zhang, Y., Zhang, F., Zhao, X., Huang, S., Feng,
Z., and Wei, Z. (2020). Spatial Attention Fusion for
Obstacle Detection Using MmWave Radar and Vision
Sensor. Sensors, 20(4):956.
Chen, M., Belgiovane, D., and Chen, C.-C. (2014). Radar
characteristics of pedestrians at 77 GHz. In 2014 IEEE
Antennas and Propagation Society International Sym-
posium (APSURSI), pages 2232–2233. ISSN: 1947-
1491.
Chu, J., Zhao, T., Jiao, J., Yuan, Y., and Jing, Y. (2023).
SOTIF-Oriented Perception Evaluation Method for
Forward Obstacle Detection of Autonomous Vehicles.
IEEE Systems Journal, 17(2):2319–2330.
Diehl, C., Feicho, E., Schwambach, A., Dammeier, T.,
Mares, E., and Bertram, T. (2020). Radar-based Dy-
namic Occupancy Grid Mapping and Object Detec-
tion. In 2020 IEEE 23rd International Conference on
Intelligent Transportation Systems (ITSC), pages 1–6.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
308

Dietmayer, K. (2016). Predicting of Machine Perception for
Automated Driving. pages 407–424. Springer, Berlin,
Heidelberg.
Engels, F., Heidenreich, P., Wintermantel, M., St
¨
acker, L.,
Al Kadi, M., and Zoubir, A. M. (2021). Automotive
Radar Signal Processing: Research Directions and
Practical Challenges. IEEE Journal of Selected Topics
in Signal Processing, 15(4):865–878.
Gerstmair, M., Melzer, A., Onic, A., and Huemer, M.
(2019). On the Safe Road Toward Autonomous Driv-
ing: Phase Noise Monitoring in Radar Sensors for
Functional Safety Compliance. IEEE Signal Process-
ing Magazine, 36(5):60–70.
Geyer, J., Kassahun, Y., Mahmudi, M., Ricou, X., Durgesh,
R., Chung, A. S., Hauswald, L., Hoang Pham, V.,
M
¨
uhlegg, M., Dorn, S., Fernandez, T., J
¨
anicke, M.,
Mirashi, S., Savani, C., Sturm, M., Vorobiov, O.,
Oelker, M., Garreis, S., and Schuberth, P. (2020).
A2D2: Audi Autonomous Driving Dataset. Technical
report. ADS Bibcode: 2020arXiv200406320G Type:
article.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
International Conference on Computer Vision (ICCV).
Hong, Z., Petillot, Y., Wallace, A., and Wang, S.
(2021). Radar SLAM: A Robust SLAM Sys-
tem for All Weather Conditions. Technical report.
arXiv:2104.05347 [cs] type: article.
Hoss, M., Scholtes, M., and Eckstein, L. (2022). A Re-
view of Testing Object-Based Environment Percep-
tion for Safe Automated Driving. Automotive Inno-
vation, 5(3):223–250.
International Organization for Standardization (2018). ISO
26262:2018 - Road vehicles - Functional safety. Tech-
nical report.
International Organization for Standardization (2022). ISO
21448:2022 - Road vehicles - Safety of the intended
functionality. Technical report.
John, V. and Mita, S. (2019). RVNet: Deep Sensor Fusion
of Monocular Camera and Radar for Image-Based Ob-
stacle Detection in Challenging Environments. In Lee,
C., Su, Z., and Sugimoto, A., editors, Image and
Video Technology, Lecture Notes in Computer Sci-
ence, pages 351–364, Cham. Springer International
Publishing.
Kellner, D., Barjenbruch, M., Klappstein, J., Dickmann,
J., and Dietmayer, K. (2014). Instantaneous ego-
motion estimation using multiple Doppler radars. In
2014 IEEE International Conference on Robotics and
Automation (ICRA), pages 1592–1597. ISSN: 1050-
4729.
Khaleghi, B., Khamis, A., Karray, F. O., and Razavi, S. N.
(2013). Multisensor data fusion: A review of the state-
of-the-art. Information Fusion, 14(1):28–44.
Khatun, M., Glaß, M., and Jung, R. (2020). Scenario-based
extended hara incorporating functional safety & so-
tif for autonomous driving. In Baraldi, P., editor, E-
proceedings of the 30th European Safety and Reli-
ability Conference and 15th Probabilistic Safety As-
sessment and Management Conference, volume 2020
of (ESREL2020 PSAM15) ; 01 - 05 November 2020
Venice, Italy, pages 53 – 59.
Knott, E. F. (2012). Radar cross section measurements.
Springer Science & Business Media.
Lee, J., Walsh, S., Harakeh, A., and Waslander, S. L. (2018).
Leveraging Pre-Trained 3D Object Detection Models
for Fast Ground Truth Generation. In 2018 21st In-
ternational Conference on Intelligent Transportation
Systems (ITSC), pages 2504–2510. ISSN: 2153-0017.
Li, M., Feng, Z., Stolz, M., Kunert, M., Henze, R., and
K
¨
uc¸
¨
ukay, F. (2018). High resolution radar-based oc-
cupancy grid mapping and free space detection.
Li, P., Wang, P., Berntorp, K., and Liu, H. (2022). Ex-
ploiting temporal relations on radar perception for au-
tonomous driving. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 17071–17080.
Maddern, W., Pascoe, G., Gadd, M., Barnes, D., Yeomans,
B., and Newman, P. (2020). Real-time Kinematic
Ground Truth for the Oxford RobotCar Dataset. Tech-
nical report. ADS Bibcode: 2020arXiv200210152M
Type: article.
Marti, E., de Miguel, M. A., Garcia, F., and Perez, J. (2019).
A Review of Sensor Technologies for Perception in
Automated Driving. IEEE Intelligent Transportation
Systems Magazine, 11(4):94–108.
Muhammad, K., Ullah, A., Lloret, J., Ser, J. D., and de Al-
buquerque, V. H. C. (2021). Deep Learning for Safe
Autonomous Driving: Current Challenges and Future
Directions. IEEE Transactions on Intelligent Trans-
portation Systems, 22(7):4316–4336.
Ouaknine, A., Newson, A., Rebut, J., Tupin, F., and P
´
erez,
P. (2021). CARRADA Dataset: Camera and Auto-
motive Radar with Range- Angle- Doppler Annota-
tions. In 2020 25th International Conference on Pat-
tern Recognition (ICPR), pages 5068–5075. ISSN:
1051-4651.
Paek, D.-H., KONG, S.-H., and Wijaya, K. T. (2022). K-
radar: 4d radar object detection for autonomous driv-
ing in various weather conditions. In Koyejo, S., Mo-
hamed, S., Agarwal, A., Belgrave, D., Cho, K., and
Oh, A., editors, Advances in Neural Information Pro-
cessing Systems, volume 35, pages 3819–3829. Cur-
ran Associates, Inc.
Patole, S. M., Torlak, M., Wang, D., and Ali, M. (2017).
Automotive radars: A review of signal process-
ing techniques. IEEE Signal Processing Magazine,
34(2):22–35.
Peng, L., Li, B., Yu, W., Yang, K., Shao, W., and Wang, H.
(2023). SOTIF Entropy: Online SOTIF Risk Quantifi-
cation and Mitigation for Autonomous Driving. IEEE
Transactions on Intelligent Transportation Systems,
pages 1–17.
Peng, L., Wang, H., and Li, J. (2021). Uncertainty Evalua-
tion of Object Detection Algorithms for Autonomous
Vehicles. Automotive Innovation, 4(3):241–252.
Philipp, R., Schuldt, F., and Howar, F. (2020). Functional
decomposition of automated driving systems for the
classification and evaluation of perceptual threats. In
13. Uni-DAS eV Workshop Fahrerassistenz und au-
tomatisiertes Fahren 2020. Walting.
Making Radar Detections Safe for Autonomous Driving: A Review
309

Popov, A., Gebhardt, P., Chen, K., and Oldja, R. (2023).
NVRadarNet: Real-Time Radar Obstacle and Free
Space Detection for Autonomous Driving. In 2023
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 6958–6964.
Powers, D. (2011). Evaluation: From precision, recall and
f-measure to roc, informedness, markedness & cor-
relation. Journal of Machine Learning Technologies,
2(1):37–63.
Robert Bosch GmbH (2023). Front-radar premium.
SAE International. (2021). J3016 - Taxonomy and Defini-
tions for Terms Related to Driving Automation Sys-
tems for On-Road Motor Vehicles. Technical report.
Sayyah, K., Sarkissian, R., Patterson, P., Huang, B., Efimov,
O., Kim, D., Elliott, K., Yang, L., and Hammon, D.
(2022). Fully Integrated FMCW LiDAR Optical En-
gine on a Single Silicon Chip. Journal of Lightwave
Technology, 40(9):2763–2772.
Scheiner, N., Kraus, F., Appenrodt, N., Dickmann, J., and
Sick, B. (2021). Object detection for automotive radar
point clouds – a comparison. AI Perspectives, 3(1):6.
Sch
¨
onemann, V. (2019). Safety requirements and distribu-
tion of functions for automated valet parking.
Schumann, O., Hahn, M., Scheiner, N., Weishaupt, F.,
Tilly, J. F., Dickmann, J., and W
¨
ohler, C. (2021).
RadarScenes: A Real-World Radar Point Cloud Data
Set for Automotive Applications. In 2021 IEEE 24th
International Conference on Information Fusion (FU-
SION), pages 1–8.
Schumann, O., Lombacher, J., Hahn, M., W
¨
ohler, C., and
Dickmann, J. (2020). Scene Understanding With Au-
tomotive Radar. IEEE Transactions on Intelligent Ve-
hicles, 5(2):188–203.
Schuster, F., Keller, C. G., Rapp, M., Haueis, M., and Curio,
C. (2016). Landmark based radar SLAM using graph
optimization. In 2016 IEEE 19th International Con-
ference on Intelligent Transportation Systems (ITSC),
pages 2559–2564. ISSN: 2153-0017.
Sheeny, M., De Pellegrin, E., Mukherjee, S., Ahrabian,
A., Wang, S., and Wallace, A. (2021). RADIATE:
A Radar Dataset for Automotive Perception in Bad
Weather. In 2021 IEEE International Conference on
Robotics and Automation (ICRA), pages 1–7. ISSN:
2577-087X.
Steinbaeck, J., Steger, C., Holweg, G., and Druml, N.
(2017). Next generation radar sensors in automotive
sensor fusion systems. In 2017 Sensor Data Fusion:
Trends, Solutions, Applications (SDF), pages 1–6.
Sun, C., Zhang, R., Lu, Y., Cui, Y., Deng, Z., Cao, D.,
and Khajepour, A. (2023). Toward Ensuring Safety
for Autonomous Driving Perception: Standardization
Progress, Research Advances, and Perspectives. IEEE
Transactions on Intelligent Transportation Systems,
pages 1–19.
Tang, X., Zhang, Z., and Qin, Y. (2022). On-Road Object
Detection and Tracking Based on Radar and Vision
Fusion: A Review. IEEE Intelligent Transportation
Systems Magazine, 14(5):103–128.
Velasco-Hernandez, G., Yeong, D. J., Barry, J., and Walsh,
J. (2020). Autonomous Driving Architectures, Per-
ception and Data Fusion: A Review. In 2020 IEEE
16th International Conference on Intelligent Com-
puter Communication and Processing (ICCP), pages
315–321.
Waldschmidt, C., Hasch, J., and Menzel, W. (2021). Auto-
motive Radar — From First Efforts to Future Systems.
IEEE Journal of Microwaves, 1(1):135–148.
Wang, Y., Jiang, Z., Gao, X., Hwang, J.-N., Xing, G.,
and Liu, H. (2021). Rodnet: Radar object detec-
tion using cross-modal supervision. In Proceedings
of the IEEE/CVF Winter Conference on Applications
of Computer Vision (WACV), pages 504–513.
Xiao, P., Shao, Z., Hao, S., Zhang, Z., Chai, X., Jiao, J., Li,
Z., Wu, J., Sun, K., Jiang, K., Wang, Y., and Yang, D.
(2021). PandaSet: Advanced Sensor Suite Dataset for
Autonomous Driving. In 2021 IEEE International In-
telligent Transportation Systems Conference (ITSC),
pages 3095–3101.
Xu, F., Wang, H., Hu, B., and Ren, M. (2020). Road Bound-
aries Detection based on Modified Occupancy Grid
Map Using Millimeter-wave Radar. Mobile Networks
and Applications, 25(4):1496–1503.
Yang, M., Wang, S., Bakita, J., Vu, T., Smith, F. D., Ander-
son, J. H., and Frahm, J.-M. (2019). Re-thinking cnn
frameworks for time-sensitive autonomous-driving
applications: Addressing an industrial challenge. In
2019 IEEE Real-Time and Embedded Technology
and Applications Symposium (RTAS), pages 305–317.
IEEE.
Yeong, D. J., Velasco-Hernandez, G., Barry, J., and
Walsh, J. (2021). Sensor and Sensor Fusion Tech-
nology in Autonomous Vehicles: A Review. Sensors,
21(6):2140.
Yu, J. and Krolik, J. (2012). MIMO multipath clutter mit-
igation for GMTI automotive radar in urban environ-
ments. In IET International Conference on Radar Sys-
tems (Radar 2012), pages 1–5.
Yurtsever, E., Lambert, J., Carballo, A., and Takeda, K.
(2020). A Survey of Autonomous Driving: Common
Practices and Emerging Technologies. IEEE Access,
8:58443–58469.
Zang, S., Ding, M., Smith, D., Tyler, P., Rakotoarivelo, T.,
and Kaafar, M. A. (2019). The Impact of Adverse
Weather Conditions on Autonomous Vehicles: How
Rain, Snow, Fog, and Hail Affect the Performance of
a Self-Driving Car. IEEE Vehicular Technology Mag-
azine, 14(2):103–111.
Zhang, A., Nowruzi, F. E., and Laganiere, R. (2021). RAD-
Det: Range-Azimuth-Doppler based Radar Object
Detection for Dynamic Road Users. In 2021 18th
Conference on Robots and Vision (CRV), pages 95–
102.
Zhou, T., Yang, M., Jiang, K., Wong, H., and Yang, D.
(2020). MMW Radar-Based Technologies in Au-
tonomous Driving: A Review. Sensors, 20(24):7283.
Zhou, Y., Dong, Y., Hou, F., and Wu, J. (2022). Review on
Millimeter-Wave Radar and Camera Fusion Technol-
ogy. Sustainability, 14(9):5114.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
310
