
Tile Quality Detection Device: Internet of Things (IoT) Demonstration
Prototype
Bernhard Heiden
1,3 a
, Danijel Pa
ˇ
cnik
1
, Jessica Pregl
1
, Maximilian M
¨
uller
1
, Simone Leitner
1
,
Volodymyr Alieksieiev
2 b
and Bianca Tonino-Heiden
3 c
1
Industrial Engineering and Management Studiengang, University of Applied Sciences,
Europastrasse 4, 9524 Villach, Austria
2
Institute of Production Management and Technology, Hamburg University of Technology,
Denickestrasse 17, 21073 Hamburg, Germany
3
Institute of Philosophy, University of Graz, Heinrichstrasse 26/V, 8010 Graz, Austria
Keywords:
Tile Quality Check, IoT-Prototype, Matlab, Arduino UNO, Microcontroller, Pattern Detection.
Abstract:
In this paper we present the development of a quality tile detection device for the Internet of Things (IoT)
demonstration in a prototype for educational purposes. For this an Arduino UNO microcontroller is used, and
the prototype is chosen after an initial design process, together with suitable tile parts, that imitate possible real
tiles in a production line in the downscaled prototype. The Artificial Intelligence (AI) task of pattern detection
is performed by a Matlab script. Finally, the Arduino, that controls the conveyor belt and the switch of the
tile quality detection device is linked to the Matlab Script, that controls the picture detection and AI-script
evaluation on the PC and its backcoupling to the Arduino, yielding a semi-automatic tile quality checking
procedure with a human in the loop.
1 INTRODUCTION
A typical application in tile production industry is to
test the quality of tiles, as in the production process
imperfections can occur (see, e.g. (Frei, 2017)), and
have then to be detected in a mass production pro-
cess. A case, with regard to ceramics industry, which
is comparable to our case, is given in (Zhang et al.,
2022), showing its relevance and state of the art prob-
lem in the industry. This hence can be regarded as
an industrial application case where Artificial Intelli-
gence (AI) techniques can be applied, as well as Inter-
net of Things (IoT) applications that implement these
tasks in a prototype that merges the cybernetic tasks
with the necessary AI for detection.
(Dong et al., 2022) have developed an indus-
trial solution prototype for mosaic tiles as a complete
workflow. The system installed on a conveyor belt,
has a detection unit, and a sorting unit by means of a
spray mechanism.
There exist a lot of AI algorithms that are used for
a
https://orcid.org/0000-0001-8324-6505
b
https://orcid.org/0000-0003-0792-3740
c
https://orcid.org/0000-0001-7648-2833
tile quality detection. E.g., that of (Wan et al., 2022)
is based on deep learning.
IoT applications range from a narrow field of ba-
sic implementations, to a wide field of broad and even
global applications, where the focus is then to typ-
ical challenges like how to merge these IoT devices
to reach one goal (e.g. (Lemoine et al., 2020) and
(Choo et al., 2018)), to reach cybersecurity (see, e.g.
(Corallo et al., 2022) and (Lindstr
¨
om et al., 2018)),
and many others. This means that the tasks, which
are performed by IoT-devices, are tremendously in-
creasing with the uprise of more and more miniatur-
ised devices in all industries. The overarching devel-
opment is triggered by the high amount of micropro-
cessor driven processes world-wide, and the ongoing
trend to make those automatisations cheaper and of
higher applicability due to the development towards
a higher functional performance, e.g. in the mobility
and energy savings sector.
For the IoT applications one widely used micro-
controller board is the Arduino UNO. It is widely
applied for IoT prototyping applications according
to its low costs among many other microcontrollers.
A good reference for the Arduino UNO is given in
(Borchers, 2013).
Heiden, B., Pa
ˇ
cnik, D., Pregl, J., Müller, M., Leitner, S., Alieksieiev, V. and Tonino-Heiden, B.
Tile Quality Detection Device: Internet of Things (IoT) Demonstration Prototype.
DOI: 10.5220/0012634000003705
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 9th International Conference on Internet of Things, Big Data and Security (IoTBDS 2024), pages 209-215
ISBN: 978-989-758-699-6; ISSN: 2184-4976
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
209

The computer algebra and programming software
Matlab is frequently used in science and industry for
solving engineering tasks, and especially it can serve
practically to implement AI applications for at least
three reasons. Firstly (1) there exists a broad inter-
national industrial user community, especially in the
area of academia, where a lot of AI-algorithms are
developed with this language, (2) secondly there is a
good support possible, which is important for indus-
trial applications, and thirdly (3) there exists a wide
range of tutorials and ready to use libraries that al-
lows to implement AI-algorithms from the scratch to
the complete set-up. E.g., in (Hanzaei et al., 2017)
a pattern detection problem is also implemented with
Matlab, as in our case for the tile quality detection.
An overview of Computer Numerical Controlled
(CNC) machines is given in (Kief, 2015). These are
used in mechanical workshops, and are often to be
found in prototyping labs or Fablabs (see, e.g. (Ger-
shenfeld, 2006)). To produce a prototype there or in
similarly structured workshops, the rapid prototyping
approach is state of the art, which means that a series
of CNC devices is used to fabricate the prototype, be-
ginning with form construction and ending with ma-
chining, e.g. with CNC-milling or 3D-printing (see,
e.g. (Gibson et al., 2015)).
One reviewer asked to answer the question <What
is new in the paper?>. This paper deals with a new
prototype used for education to learn new and ac-
tual technologies used in industry and production.
(Mesch, 1985) has pointed out that in education new
measurement technologies lead also to a new kind of
education. (1) New material, (2) new or until now
not utilized physical effects, and (3) new applications
are, according to Mesch, elements of newness, that
induce possible different approaches in teaching as a
consequence. Applied to our case, the newness is con-
stituted by the here presented student’s project, that
has conceptualised the problem of tile quality detec-
tion in integrating all the aspects of the state of the
art industrial technologies: CNC-production, IoT pro-
totyping and algorithmic or in general AI-open IoT-
implementation.
The prototype can now additionally be used for
applying industrial concepts in a classroom environ-
ment, and it is available as an open source application
(Heiden et al., 2024) for the IoT community.
Goal of the Work. The goal of the work is to de-
velop, build and demonstrate an IoT-prototype for an
educational classroom setting of a realistic tile pro-
ducing ceramics industry exercise and as an educa-
tional task to combine mechanical engineering tasks
with the design of an IoT device, and providing an AI
method of pattern detection, by an integrated proto-
type.
Research Questions. The main research question
of the work is: <How can a downscaled prototype of
an IoT-device for educational demonstration purposes
be built for the quality detection of tiles by applying
AI-algorithms in ceramics industry?>.
Content. In this paper we first give in Section 2 an
overview over the design of the IoT model tile quality
detection device. In Section 3 we discuss the results
of this work. In Section 4 we then give the conclu-
sions and outlook of the work.
Methods Used. The method of this work is to
design, construct, build and test an IoT model pro-
totype, which incorporates essential elements of an
automatised tile quality detection. For the construc-
tion a mechanical workshop is used, as well as CNC
milling. For the quality detection AI algorithms are
implemented in Matlab. The Arduino UNO is used
as basis IoT-backbone for the prototype. A half-
automatised communication between the Arduino and
the Matlab computer application is then used to im-
plement the pattern detection, by means of a human-
machine interaction.
2 TILE QUALITY DETECTION
DEVICE
In Figure 1 we see the prototype of the tile quality
detection device. It consists of downscaled round tile-
models, the slide, the conveyor belt the photoelectric
and the tile detection sensor and a switch for choosing
the right tile, powered by a stepper motor. The flow
diagram can be seen in Figure 3.
2.1 Material for Virtual Tile Detection
Since dealing with normal tiles is quite unwieldy,
‘sample tiles’ are designed and made. Therefore, the
patterns are milled from a phenolic resin coated ply-
wood in different variants. The coating is brown, fur-
ther the coating is glossy and therefore simulates a
regular tile surface. The plate thickness is 10 mm.
In addition, the tiles have a diameter of 70 mm. The
round shape is chosen for the sake of simplicity be-
cause we are implementing a model production sys-
tem. The following samples were produced:
• Model 1: Error-Free
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
210

tile-detection camera
stepper motor
for switch underneath
conveyor belt
photoelectric
sensor
bad tiles
lane
good tiles
lane
power line 12V
tile-
models
slide
start
button
Figure 1: Tile Quality Detection Device IoT-Demonstration Prototype. More details can be found in the complete project
documentation (in German) of the prototype in (Heiden et al., 2024).
• Model 2: Error 1
• Model 3: Error 2
• Model 4: Special motive 1 ‘Platypus’
• Model 5: Special motive 2 ‘Koi’
These five Models were chosen to be programmed at
the image processing (pattern recognition) in the fur-
ther course. Model 1 should be recognized without er-
rors, Models 2 and 3 should be recognized with errors
and the accuracy of the system should also be tested.
The special motives koi and platypus must be recog-
nized as mistakes in Model 4 and 5 (see also Figure
2).
First, the five design Models were each individu-
ally converted into 3D drawings/3D models in the
program Fusion 360 and the associated G code (see,
e.g. (Kief, 2015)) was created. The G code, also
called DIN code, is the machine language with which
the user controls the CNC machine and with which
the CNC machine moves to the desired position or
depth and mills or engraves. Secondly, the program
Estlcam V11 processes the G code and controls the
CNC machine used. Thirdly, the coordinate system of
the CNC machine must be determined, and the work-
piece must be clamped. Finally, the desired motive is
milled.
The used tools were (1) the engraving graver with
a 30° tip and an end mill. For safety reasons, the
samples were milled beginning with a bar, so that
they are not loose in the machine. For this reason, all
samples were reworked with a (2) jigsaw, (3) a belt
sander with fine-grain sandpaper and (4) an air com-
pressor.
A total of 24 pieces were made: 10x Model 1
error-free, 4x Models error error 1 and error 2 each,
1x special motive platypus and koi, or Models 4 and
5, and 4 samples without the brown coating (wood
look).
2.2 Artificial Intelligence (AI) Tile
Detection
In the project, image processing is carried out using
Matlab. A webcam of the company CamPark of the
type PC02 is used (see also Figure 1), and document-
ation in (Heiden et al., 2024).
The program workflow is shown in Figure 3. (1)
First a function is created by the user to get inputs and
outputs and, as in this case, these are reused in another
file. With ‘Bildverarbeitung002.m’ (see the program
code in (Heiden et al., 2024)), a single image is cap-
tured with the camera. The captured image is always
an RGB image. This program uses the standard resol-
ution of the camera. Image corrections are then made.
A structuring element is a binary-valued neighbour-
hood, either 2-D or multi-dimensional, in which the
true pixels are included in the morphological calcu-
lation and the false pixels are not. The central pixel
Tile Quality Detection Device: Internet of Things (IoT) Demonstration Prototype
211

(a)
(b)
Model 1
Model 2
Model 3
Model 4
Model 5
Figure 2: Tile Quality Test Parts - Constructed and Real
Implementation.
Figure 3: Program Workflow.
of the structuring element, called the origin, identifies
the pixel in the image to be processed. In this case,
‘strel(“disk”,r)’ creates a disk-shaped structuring ele-
ment, where r indicates the radius, here 15. Then,
using this structuring element, ‘imdilate’ expands the
image.
The next step is to count the black pixels, this
is done to determine if the sample is a good or bad
pattern. First, the greyscale image is binarised by
thresholding, replacing all values above a globally
defined threshold with ones and setting all other val-
ues to zeros. Since the image has now been divided
into zeros and ones, the black pixels must be counted,
i.e. all ones, since the zeros represent the white pixels.
(2) The file ‘createMask1.m’ (see the program
code in (Heiden et al., 2024)) is used to differentiate
those colour areas that occur on the pattern pane. The
Color Thresholder app is used for this. It automat-
ically generates a code. The Color Thresholder app
can be used to segment colour images by threshold
values for the colour channels based on different col-
our spaces. With this app, one can create a bin-
ary segmentation mask for a colour image. Color
Thresholder supports segmentation in four colour
spaces. In each colour space, the application displays
the image, the three colour channels and the colour
value of all pixels as points in a 3D colour space dia-
gram. One can select the colours contained in the
mask by displaying the colour channel values in a
window or by drawing Regions of Interest (ROI) in
the image or in the 3D colour space diagram. In the
following we show how to segment an image and cre-
ate a mask image using the Color Thresholder app.
With the pattern slice, the pattern (triangle) is seg-
mented from the background (slice and conveyor belt)
based on colour values. The image can be segmen-
ted in several of the colour spaces supported by the
app, as one colour space can isolate a particular col-
our better than another. In the project, the RGB col-
our space is chosen because it gave the best result. In
each of the supported colour spaces, one can first per-
form an automatic segmentation by selecting an area
in the foreground or background. Then one can refine
the segmentation using the colour component controls
provided by the application. Once the segmentation is
complete, the results are saved, a mask image is cre-
ated and the Matlab code used by the app to perform
the segmentation is retrieved.
(3) Finally, the communication between Matlab
and Arduino is implented. This is done by the pro-
gram ‘KommunikationMaltabArduino002.m’ (see the
program code in (Heiden et al., 2024)).
2.3 Construction of the IoT Device
Demonstration Prototype
To demonstrate and evaluate the process of tile qual-
ity detection an IoT device is needed. Therefore,
a prototype was produced by common manufactur-
ing processes. In other words, a conveyor belt has
been built, driven by a 12 VDC gear-motor to gen-
erate enough torque for the application. All needed
work steps were achieved by in house manufactur-
ing. These include some of the following manufac-
turing processes: several joining and cutting meth-
ods containing CNC cutting, 3D-Modelling, weld-
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
212
ing, soldering and other commonly known proced-
ures. Moreover, all the electrical requirements needed
to be addressed as well, whereas the implementation
belongs to and has a huge impact on the proper func-
tionality. To address this necessity up to date methods
were used, like prototype circuit board cutting with
an application related CNC cutting machine (details
can be found in the project documentation in (Heiden
et al., 2024)). Moreover, the choice of all the elec-
trical components were chosen to allow for an inter-
action between all the used sensors and actuators. The
prototype-like circuit board construction is needed,
because the whole IoT-device is powered by an ex-
ternal 12VDC energy source, but some of the com-
ponents need an individual DC potential to operate.
An Arduino UNO was used to process all the sensor
signals and operate the actuators, requiring a custom
Arduino shield.
2.4 Control System of Prototype
The control system of the application is based upon
the Arduino UNO microcontroller, thus the coding
was ensued in the Arduino development environ-
ment. The inspection process can be portrayed and
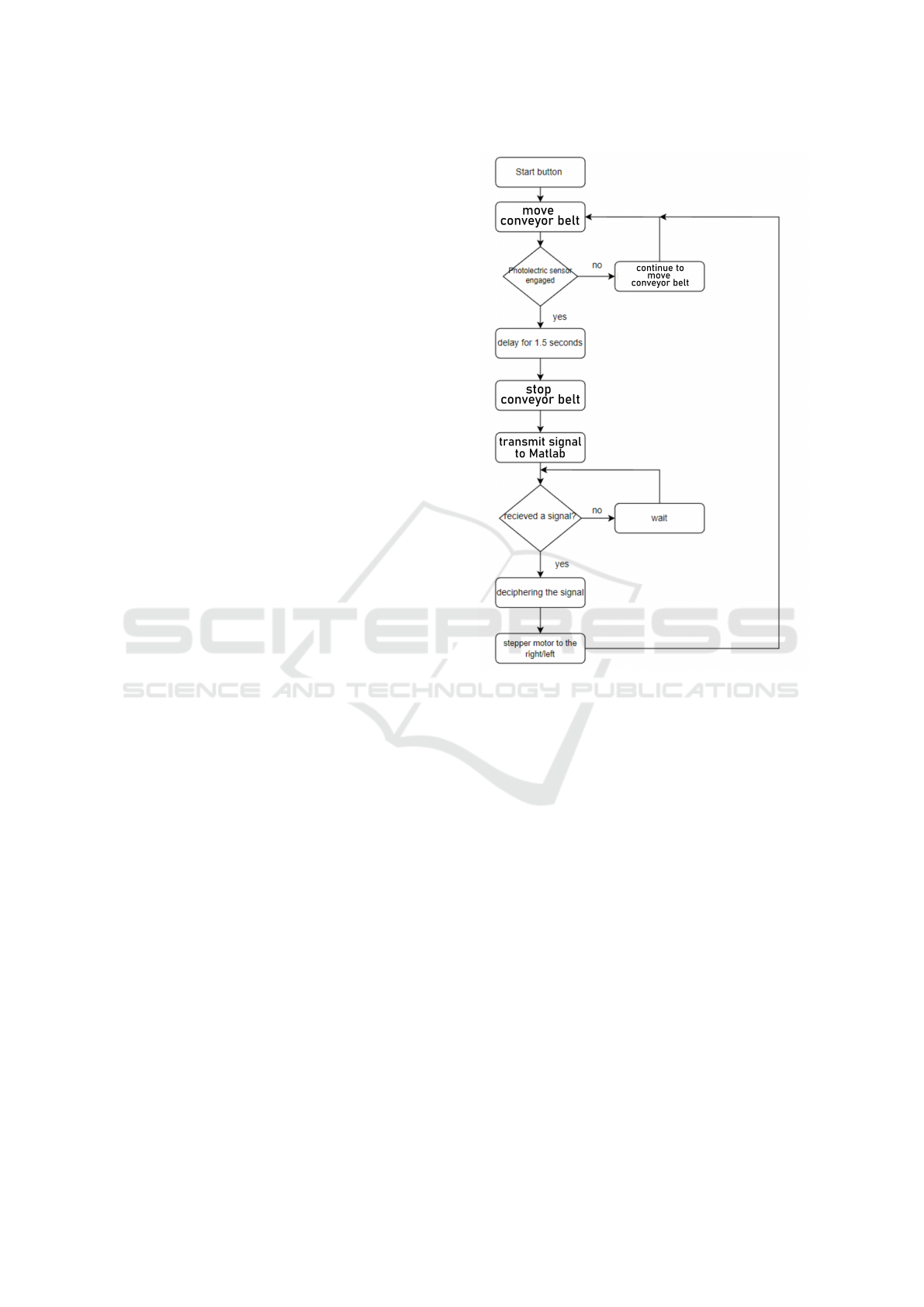
explained via the flow chart diagram in Figure 3 and
4.
It starts with a press of a physical button (there is
an option to start the process through serial monitor
as well). As a result, the DC motor powers on and
puts the conveyor belt in motion. If the photoelec-
tric sensor picks up a signal the belt is stopped in 1.5
seconds. This allows for the object to align directly
under the camera, which is responsible for creating
an image of the inspected object. While it is posi-
tioned under the camera, the Arduino transmits a sig-
nal via serial communication to the connected laptop
that runs the Matlab software, where the image pro-
cessing takes place. While the Matlab process takes
place, the state of the device stays the same. After-
wards a signal is sent back, which consists either of a
zero (‘0’) or one (‘1’). The Arduino therefore needs
to decipher the signal and acts then according to the
outcome. A ‘1’ signal causes to move the stepper mo-
tor to the left, where the qualified objects are sorted
and the ‘0’ to the right. Finally, the conveyor belt
starts moving again to successfully sort the inspected
object.
The whole CNC system consists of the following
components:
• DC Motor – for powering the conveyor belt
• Stepper motor – Stepper is attached with a
custom-made sorter to angle the objects
Figure 4: Flow Sheet Program of the Tile Quality Check
Prototype.
• Photoelectric sensor – to sense the objects, which
pass by
• Limit switch – mounted to the left and right of the
stepper motor to limit its movement
• Start key – to power on the device
The Arduino code consists of switch cases, which
allow the device to move from case to case accord-
ingly in a loop. Moreover, multiple time variables
are used, in order to keep track of the process and
to control its movements as well as the integrated Ar-
duino functions such as millis() for the time measure-
ments and isAlpha() and isAlphanumeric() for deci-
phering the received signals. A thing to keep in mind,
while using serial communication as indicators for the
switch sequences, is to regularly clear the contents out
of the serial monitor, due to the possibility of reading
the older or wrong input.
Tile Quality Detection Device: Internet of Things (IoT) Demonstration Prototype
213

3 DISCUSSION
The first test
1
has shown, that there is a huge depend-
ency of the light condition on the effective detection.
The sensitivity to this problem is also reported in in-
dustry in (Coskun et al., 2022), and counter measures
have been taken by, e.g. illumination equipment. Al-
though the general overall problem has been simpli-
fied by the round geometry of the tiles, there remain
problems of pattern detection, although the mechan-
ical handling works fine.
Another point is that in such experiments then the
statistical results are automatically and not manually
generated. By this different algorithms could be ana-
lysed systematically in an empirical fashion, which is
now limited to a lot of manual interaction.
Concerning real world applications, this prototype
is usable in classroom settings, as it is small, mobile
and easy to transport. For a scale-up of this proto-
type to industrial applications, the Matlab automation
can easily be used and adapted for industrial environ-
ments. The before mentioned problems with scanning
quality, has additionally to be addressed.
The overall process is not fully automated, as there
has to be an interaction of the operation with the tiles
and the user who runs the Matlab program. For an
industrial application procedure it would be necessary
that the process works autonomously and reliable.
An automated testing extension for test data gen-
eration and to make automated testing and its statist-
ical data evaluation of the quality of the testing would
improve the current prototype system significantly,
which would then be in the upscaled version a kind
of auto-calibration function in the field.
4 CONCLUSION AND OUTLOOK
An IoT prototype for detection patterns in tiles, that
are related to quality issues in production is investig-
ated in this paper. For this an IoT device has been
designed, built, and tested. The result is the IoT-
prototype shown in Figure 1. The AI is implemen-
ted with a Matlab program. The communication is
triggered by Matlab and the main control of the device
on the other side is done by an Arduino UNO pro-
gram, powering the hardware of the given IoT device.
The future outlook of the work is to improve the
light sensitivity of the device, the robustness, of the
detections algorithms with regard to different tiles and
the implementation of more sophisticated AI models
like, e.g. deep learning. Another point is to further
1
See project documentation in (Heiden et al., 2024).
generalise (a) the prototype, so that it can be used
for the detection of more complex patterns, and (b)
patterns that are derived from real examples from in-
dustry. In those cases also the velocity is important,
which then means that a different than purely Matlab
and Arduino based method for this application could
possibly be taken into consideration for improving the
effective productivity, reliability, reproducibility, ef-
fective detection efficiency, etc.
Finally, it has to be mentioned that the solution
of the problem of pattern detection is only one aspect
of quality issues. The other is of improving the pro-
cess, which then means that the patterns are subject
to an evolutionary change in the course of continu-
ous process improvement. This then also will open up
the question how to implement this pattern changing
situation into the pattern detection problem on the one
hand and to use AI to avoid quality issues by process
identification and process parameter improvement on
the other side before those quality issues occur, which
then also means that the ’quality type’ or the meta-
quality of detection could change in the course of this
continuous improvement process.
This, as well could then be implemented in a fu-
ture new version of an educational prototype, which
can then be understood as a downscaled educational
IoT twin of the industrial original IoT device.
REFERENCES
Borchers, J. (2013). Arduino in a Nutshell. http://hci.rwth-
aachen.de/arduino
Choo, K.-K. R., Bishop, M., Glisson, W., and Nance, K.
(2018). Internet- and cloud-of-things cybersecurity re-
search challenges and advances. 74:275–276.
Corallo, A., Lazoi, M., Lezzi, M., and Luperto, A. (2022).
Cybersecurity awareness in the context of the indus-
trial internet of things: A systematic literature review.
137:103614.
Coskun, H., Yigit, T., and
¨
Unc
¨
u, I. S. (2022). Integration of
digital quality control for intelligent manufacturing of
industrial ceramic tiles. 48(23):34210–34233.
Dong, G., Sun, S., Wu, N., Chen, X., Huang, P., and Wang,
Z. (2022). A rapid detection method for the surface
defects of mosaic ceramic tiles. 48(11):15462–15469.
Frei, F. (2017). Production optimisation based on a case
study at the company CerMed inc., original in Ger-
man: Produktionsoptimierung anhand einer Fallstudie
bei der Firma CerMed GmbH. Bachelor Thesis, Vil-
lach, Carinthia University of Applied Sciences.
Gershenfeld, N. (2006). Unleash your creativity in a fab
lab. Feb. 2006, video, length: 17’15”. https://www.
ted.com/talks/neil gershenfeld on fab labs
Gibson, I., Rosen, D., and Stucker, B. (2015). Additive
Manufacturing Technologies 3D Printing, Rapid Pro-
totyping, and Direct Digital Manufacturing. Springer.
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
214

Hanzaei, S. H., Afshar, A., and Barazandeh, F. (2017).
Automatic detection and classification of the ceramic
tiles’ surface defects. 66:174–189.
Heiden, B., Pacnik, D., Pregl, J., M
¨
uller, M., and Leit-
ner, S. (2024). Source code for the tile quality
detection device. https://github.com/BernhardHeiden/
TileQualityDetectionDevice
Kief, H. (2015). CNC-Handbuch CNC, DNC, CAD,
CAM, FFS, SPS, RPD, LAN, CNC-Maschinen, CNC-
Roboter, Antriebe, Energieeffizienz, Werkzeuge, In-
dustrie 4.0, Fertigungstechnik, Richtlinien, Normen,
Simulation, Fachwortverzeichnis. Hanser, M
¨
unchen.
Lemoine, F., Aubonnet, T., and Simoni, N. (2020). Self-
assemble-featured internet of things. 112:41–57.
Lindstr
¨
om, J., Eliasson, J., Hermansson, A., Blomstedt, F.,
and Ky
¨
osti, P. (2018). Cybersecurity level in IPS 2
: A case study of two industrial internet-based SME
offerings. 73:222–227.
Mesch, F. (1985). Impact of new technology on measure-
ment education. 3(1):44–48.
Wan, G., Fang, H., Wang, D., Yan, J., and Xie, B. (2022).
Ceramic tile surface defect detection based on deep
learning. 48(8):11085–11093.
Zhang, H., Peng, L., and Lei, G. (2022). Saliency detec-
tion for surface defects of ceramic tile. 48(21):32113–
32124.
Tile Quality Detection Device: Internet of Things (IoT) Demonstration Prototype
215
