
A Qualitative Review of Full Sized Autonomous Racing Vehicle Sensors:
A Case Study
Manuel Mar
a
and Eric Dietz
Department of Computer Information Technology, Purdue University,401 Gran St, West Lafayette, U.S.A.
Keywords:
Autonomous Vehicles, Racing, Motorsports, High-Speed, Sensors, Autonomy Hardware,
Vehicle Architecture, High-Performance, ADAS, Electric Vehicles.
Abstract:
This paper explores into the challenges and advancements encountered in the development and operation of
full-sized autonomous cars built for motorsports competitions. Concentrating on a qualitative examination
of the sensor configuration, structure, and real-time assessment of vehicle platforms in the Indy Autonomous
Challenge and Roborace. The scrutiny is centered on recent years’ research and the vehicles’ performance
in demanding conditions, systematically highlighted and summarized in this paper. The analysis furnishes a
more concise and condensed comprehension of the prevailing trends in such competitions, offering insights
into the future of autonomy in the coming years.
1 INTRODUCTION
Advanced Driver Assistance Systems (ADAS), as de-
fined by the SAE, encompass six levels of automation
(On-Road Automated Driving (ORAD) Committee,
2021). These systems heavily depend on an array of
sensors and software to accurately perceive their sur-
roundings, to achieve full automation without human
intervention. As we move closer to this reality, the
sensor industry is witnessing rapid growth, innovat-
ing to meet the challenges that autonomous systems
present (Ahangar et al., 2021). Notably, autonomous
ground systems such as cars, trucks, and trains con-
tinue to grapple with specific, unresolved challenges,
motivating researchers and engineers to dive into this
area (Yeong et al., 2021).
The world of motorsport, characterized by condi-
tions like steep inclines, high-speed cornering, and the
nuanced techniques such as”lift and coast”, presents
its unique set of challenges. Racing circuits featur-
ing vehicles like IndyCar, Formula E, and Formula
1 represent the pinnacle of high-performance design.
The technological innovations nurtured in these rac-
ing arenas often find their way into commercial vehi-
cles (Sarkar and Mohan, 2019). Racing drivers, with
their deep understanding of vehicle dynamics and
performance, exhibit skills and techniques that are
difficult to replicate via software or automated sys-
a
https://orcid.org/0000-0003-3245-7964
tems. While sensors can process information faster
than human senses, the nuanced comprehension a
racer possesses often surpasses that of an average
driver. In recent times, numerous autonomous rac-
ing competitions have emerged that challenge engi-
neers and researchers (Buehler et al., 2009),(Robo-
race, 2016),(A2RL, 2023),(IAC, 2020). These pro-
grams provide a platform to gain deeper insights, ad-
dress existing issues, and elevate vehicle performance
and development. Some of these competition mile-
stones are shown in Figure 1.
2008 DARPA Challenge
2016
Roborace - Devbot 1.0 – Initial Deployment
2017 Roborace - Robocar Testing
2019 Roborace - Robocar - Speed Record - 284 kph
2019 Roborace - Devbot 2.0 – Multi-vehicle Competittion
2020 Roborace - Devbot 2.0 – Collision Avoidance Test
2021 IAC - Single Vehicle Trials Race
2022 IAC - Multiagent Race at LVMS
2023 IAC - Road Course Single Vehicle Time Trial
2024 A2RL - Multiagent Abu Dhabi YAS Marina Circuit
Figure 1: Autonomous Racing Milestone.
High-speed racing vehicles, as defined within the
context of this research, encompass vehicles engi-
neered to operate under stringent conditions, expe-
riencing substantial lateral forces, and capable of
achieving swift acceleration. Over the past decade,
technological advancements in sensors have spawned
Mar, M. and Dietz, E.
A Qualitative Review of Full Sized Autonomous Racing Vehicle Sensors: A Case Study.
DOI: 10.5220/0012634800003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 311-318
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
311

an array of high-performance ground vehicle pro-
grams, each characterized by distinct metrics, propul-
sion systems, and performance outcomes. The last
decade has introduced multiple autonomous racing
programs where ground race vehicles were built
specifically for racing purposes, vehicles are han-
dled at their limits (Betz et al., 2022). This research
will concentrate on two significant projects that in-
volved the development of full-sized autonomous rac-
ing vehicles for racing platforms: Roborace and the
Indy Autonomous Challenge. These programs show
distinctions in their racing architecture, conceptual
frameworks, and performance metrics. Nonetheless,
they also share commonalities, particularly concern-
ing sensor and software performance in real-time sce-
narios. Building upon the foundation laid by (Mar
et al., 2024), this study will predominantly delve into
the sensor setup of each vehicle model, describing
specific challenges these sensors may encounter dur-
ing testing. Subsequently, we will offer a comprehen-
sive overview of their real-time performance based on
previous tests.
2 SENSOR SETUP
When considering the vehicle hardware configura-
tion, the selection of specific devices involves several
possible combinations influenced by both technical
and non-technical factors. Similar to traditional mo-
torsports competitions, these selections are not only
dictated by technical considerations but also by non-
technical factors, notably the availability of sponsors.
It’s noteworthy that, unlike conventional racing, spon-
sors in autonomous racing have a direct impact on the
final vehicle design and the choice of hardware com-
ponents.
In this section, we present a comprehensive table
summarizing the sensors used in the vehicles from the
studied competitions, namely Roborace and the Indy
Autonomous Challenge (IAC).
2.1 Roborace
Roborace, inaugurated in 2016, introduced three dis-
tinct vehicle models: Devbot (2016), Robocar (2017),
and Devbot 2.0 (2018). While there are notable dif-
ferences in design across these models, the sensor ar-
chitecture remained consistent for the three different
versions of this series. The sensor suite included Li-
DARs, cameras, radars, and ultrasonic speed sensors
as the extereoceptive sensors, which are shown in Ta-
ble 1. The computational backbone consisted of the
NVIDIA Drive PX2 (NVIDIA, 2016) for high-level
planning and perception processing while the Speed-
goat Mobile Target Machine (Speedgoat, 2016) was
used for real-time control tasks (Betz et al., 2019) and
ensuring low-latency communication with the vehi-
cle’s actuators, it facilitated rapid adjustments based
on the decisions made by the high-level planning sys-
tem.
The integration of LiDARs, cameras, and radars
systems provided a 360-degree environmental percep-
tion. Four LiDARs working in tandem with six cam-
eras contributed visual input for object recognition
and enhanced understanding of the race environment.
Additionally, four radars added layers of sensing, re-
inforcing the vehicles’ ability to detect and respond to
surrounding objects. This sensor fusion strategy cre-
ated a sophisticated perception framework, boosting
the vehicles’ overall awareness on the race track.
The transition from Devbot 1.0 to Robocar and
Devbot 2.0 exemplified a systematic approach to sen-
sor placement and testing objectives. The initial de-
sign of Devbot 1.0/2.0, featuring a Le Mans Proto-
type (LMP) chassis, carefully considered scenarios
involving potential human intervention. In contrast,
the cockpitless design of the Robocar gave a distinct
futuristic design, stressing the intent to test the vehicle
at elevated speeds without direct human intervention.
This design choice reflected a forward-looking vision,
emphasizing a commitment to pushing the boundaries
of performance. Furthermore, the powertrain design
displayed a deliberate effort to replicate the advance-
ments achieved in the electric Formula E, leveraging
its widespread popularity. This emphasis is notably
reflected in the choice of electric motors as the pri-
mary propulsion source for these vehicles, with de-
tailed power specifications provided in Table 1.
2.2 Indy Autonomous Challenge
Introduced in 2020 and hosting its inaugural race in
2021, this series debuted with the AV-21 model, ini-
tially engineered by Clemson University’s Deep Or-
ange project (Zhu et al., 2021). Mimicking the phys-
ical appearance of the Indy Car series and adopting a
cockpitless design, which emphasizes the avoidance
of direct human intervention during testing.
The selection of sensors, detailed in 1, aimed at
redundancy for decision-making and perception. Li-
DAR, Radar, and Cameras were chosen, offering flex-
ibility for usage individually or in fusion. This selec-
tion is intended to equip the vehicle with a compre-
hensive understanding of its dynamic environment,
crucial for navigating at high speeds. LiDAR tech-
nology, with three units, played an important role in
addressing challenges such as reflection delays and
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
312
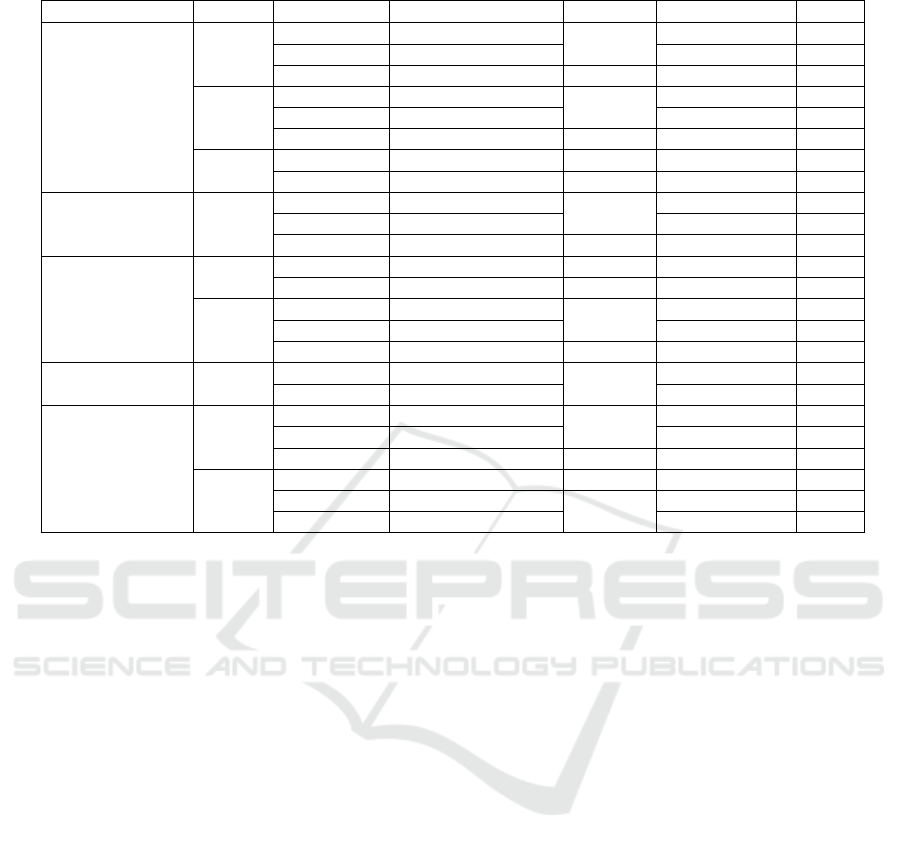
Table 1: Sensor Summary Roborace and IAC Vehicle Model.
Sensor Type Device Made Model Series Vehicle Model Quant
Perception
LiDAR
Luminar Hydra 3
IAC
AV-21 3
Luminar Iris AV-24 3
Ouster Ibeo - OS1 -16/64 Roborace D1/D2/Robocar 4
Radar
Aptiv ESR 2.5 - MRR
IAC
AV-21 2
Continental ARS548 RDI AV-24 2
N/A N/A Roborace D1/D2/Robocar 4
Camera
AlliedVision Mako G319C IAC AV-21 6
N/A N/A Roborace D1/D2/Robocar 6
Localization GNSS
Novatel PwrPak 7
IAC
AV-21 2
Vectornav VN-310 AV-21 /AV-24 1/ 4
N/A N/A Roborace D1/D2/Robocar 1
Powertrain
Engine
N/A Electric -136kW Roborace D1/D2/Robocar 4
Honda Honda K20C IAC AV-21/AV-24 1
ECU
Motec M142
IAC
AV-21 1
New Eagle GCM 196 Raptor AV-21 1
Mclaren N/A Roborace D1/D2/Robocar 1
Communications Switch
Cisco IE 3300
IAC
AV-24 1
Cisco IE 5000 AV-21 1
Computing
CPU
Dspace Autera Autobox
IAC
AV-21/AV-24 1
Adlink AVA 3501 AV-21 1
Speedgoat MRT Targetmachine Roborace D1/D2/Robocar 1
GPU
NVIDIA NVIDIA Drive PX2 Roborace D1/D2/Robocar 1
NVIDIA Quadro RTX 8000
IAC
AV-21 1
NVIDIA RTX A5000 AV-21/AV-24 1
adapting to banking angles. The Radar introduced
an additional layer of redundancy, enhancing the ve-
hicle’s capacity to detect and respond to dynamic
changes in the racing environment for medium and
large-range detection. The multi-camera setup fa-
cilitated comprehensive visual coverage, contributing
to object recognition, lane tracking, and an overall
understanding of the racing environment (Ayala and
Mohd, 2021). While originally designed for indus-
trial applications such as surveillance, machine vi-
sion or robotics,the cameras were repurposed for au-
tonomous racing. Which were not intended for expo-
sure to high lateral forces and vibrations. For local-
ization, two GNSS units were used initially; however,
due to some challenges during initial tests an addi-
tional unit was inserted later which was intended to
address signal loss or inaccuracies at higher speeds.
All sensors had the highest refresh rates in the mar-
ket, a crucial feature for a racing context, where split-
second decisions are imperative. IAC AV-21 incor-
porated two robust embedded computers equipped
with the NVIDIA Quadro RTX 8000 GPU and the
RTX A5000. Additionally, the selection included the
ADlink AVA-3501 and Autera Autobox. These de-
vices were selected mainly because of the harsh con-
ditions this car experimented with, embedded sys-
tems by definition are designed to perform specific
tasks (Tumeo et al., 2017). The powertrain configu-
ration remained consistent with that of an Indy Car,
which was not altered. Additionally, the choice of
data transfer mechanisms and electronic control units
(ECU) was provided by combining industry and com-
mercial devices, resulting in data acquisition rates that
exceeded standard levels.
3 REAL TIME PERFORMANCE
The real-time performance evaluation of autonomous
racing vehicles is crucial to assess their capabili-
ties and address challenges encountered during high-
speed racing scenarios. This section delves into the
dynamic aspects of the Roborace and IAC vehicles,
emphasizing real-time challenges and outcomes.
3.1 Roborace
As this remains a motorsports competition, the speeds
achieved during each event or race are of significant
importance. The summarized speeds, as shown in Ta-
ble 2 exhibit a gradual acceleration in both Roborace
and the IAC. At the same time, competitors require
extensive software development and validation, a sub-
stantial portion of which occurs off-the-track.
A Qualitative Review of Full Sized Autonomous Racing Vehicle Sensors: A Case Study
313

3.1.1 Devbot 1.0
The preliminary rollout of the vehicle underwent test-
ing at UK Donington Park (BBC, 2016) and the Mar-
rakech Formula E Street Track. During the latter ses-
sion, the vehicle completed 12 laps in a time frame of
30 minutes (Knight and Blendis, 2016). These tests
were conducted to assess and evaluate the initial de-
ployment of sensors and the overall real-time perfor-
mance on the track. After that, the deployment of De-
vbot 1.0 at the Buenos Aires EV Grand Prix in 2017
witnessed two significant events. In the first event, the
vehicle completed the course track, reaching a maxi-
mum speed of 186 km/h. In the second event, a colli-
sion occurred when one of the vehicles miscalculated
a corner while traveling at high speed, resulting in
a crash (Kelion, 2017). ’Devbot’ raced against hu-
mans in two different experiments. The first one on
the Hong Kong Central ePrix track, in which a non-
professional driver got 86 seconds compared to De-
vbot’s time of 94 seconds, surpassing Devbot by 8
seconds, where both reached top speeds of 150-160
km/h (Dow, 2017). In 2018, a professional driver re-
peated the experiment and raced against Devbot 1.0
in Rome for the opening of the Formula E event. In
this case, the pro-driver outperformed the Devbot by
26 seconds(Fingas, 2018).
University teams initiated the testing of their soft-
ware platforms by executing three autonomous laps
on the Berlin Racetrack, achieving top speeds of up
to 150 km/h. The use of a global optimal planner for
path generation ensured smooth on-track performance
with no notable hardware issues or delays. The lateral
error was minimal, reaching a maximum of 0.8 me-
ters (Stahl et al., 2019b). Another study conducted by
(Caporale et al., 2018) demonstrated a low lateral er-
ror of 0.3 meters. This study employed sensor fusion
state estimation and a non-linear MPC controller in
the initial version of Devbot on a road course track for
two laps. In both instances, the computing and sen-
sor architecture exhibited robust performance with-
out significant issues, allowing the vehicles to achieve
high speeds of up to 150 km/h.
In (Caporale et al., 2019), various challenges were
identified in the autonomous vehicle system. One no-
table issue pertained to computing, specifically the
overload of the ARM CPU during scan matching on
the PX2, resulting in occasional failures. Addition-
ally, concerns were raised about vehicle alignment
during trajectory planning. The use of a single mass
model failed to account for instances where the vehi-
cle’s alignment did not align perfectly with the path
tangent, consequently leading to reduced accelera-
tion, particularly in certain turns.
A final test was performed with the Robocar
where the vehicle was pushed to the limit and reached
280 km/h to set a new record (Roborace, 2019), there
has not been any disclosure of data or study that was
done during this test.
3.1.2 Devbot 2.0
Devbot 2.0 experienced extensive testing across var-
ious race events, including the Zala Zone, Circuit de
Croix, Montebanco Spain, Modena, and others. In a
study conducted by (Stahl et al., 2019a), the vehicle
planner achieved an average rate of 16.8 Hz, demon-
strating capabilities up to 212 km/h with a 200ms
prediction to anticipate the movements of the lead-
ing vehicle. Tests carried out at the Zala Zone Hun-
gary and the Circuit de Croix-en-Ternois in France
showcased lidar-based localization with a lateral er-
ror consistently below 10 cm. The vehicle achieved
speeds exceeding 45 m/s and accelerations greater
than 10m/s
2
. Challenges arose in time synchroniza-
tion with sensors, as a 10ms delay at 30m/s could
result in a 0.3m error, necessitating vehicle odome-
try (Schratter et al., 2021). (Renzler et al., 2020) ad-
dressed lidar distortion correction and delay compen-
sation at Zala, reaching speeds up to 90 km/h with
accelerations of 10ms at a 20Hz rate . Teams also
experimented with Kalman filters in conjunction with
LiDAR, IMU, and vehicle dynamic sensors, achiev-
ing a peak speed of 90 km/h. (Zubaca et al., 2020) set
a lap record of 1 minute and 37.440 seconds at Cir-
cuit de Croix-en-Ternois, averaging approximately 65
km/h.
Some of the performance and metrics parameters
are:
• State Estimation. The Improved H-infinity Fil-
ter, utilizing vehicle sensors like LiDAR, IMU,
GPS, and Vehicle Odometry, consistently main-
tained estimation errors across laps. In con-
trast, the Extended Kalman Filter (EKF) exhib-
ited growing errors after each lap (Zubaca et al.,
2020).
• High-Speed LiDAR Use. The study demon-
strated that even when subjected to high speeds
and accelerations reaching up to 10 m/s² in both
longitudinal and lateral directions, precise LiDAR
measurements and corrections can be achieved
(Renzler et al., 2020).
• Effect of Distortion on Dynamic Driving. Dis-
tortion was less visible when objects were present
due to reflections being within the boundaries of
the track. The difference between distorted and
corrected point clouds decreased progressively
from the first to the fourth quadrant (Renzler et al.,
2020).
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
314

• Vehicle Alignment. The trajectory planning re-
lies on a single mass model, which fails to con-
sider the vehicle alignment that may not always
be tangent to the path. This oversight results in
reduced acceleration during certain turns (Capo-
rale et al., 2019).
3.2 Indy Autonomous Challenge
The IAC conducted tests and races on various tracks,
including Indianapolis Motor Speedway, Las Vegas
Motor Speedway, Texas Motor Speedway, Lucas Oil
Raceway (Oval) and Monza Circuit. Initially, univer-
sity teams led the deployment of the AV-21, with the
first shakedown occurring at Lucas Oil Raceway at
lower speeds, not reaching the vehicle’s dynamics’
peak performance because of the physical limitations
of the track itself.
Table 2 provides insight into vehicle speed perfor-
mance and race formats. Similar to Roborace, achiev-
ing higher speeds correlates directly with the avail-
ability of track time and space, allowing researchers
and engineers to simulate and enhance the software
stack’s robustness and validity. Numerous publica-
tions and issues have surfaced in connection with this
race series (Betz et al., 2022), highlighting challenges
in integrating the hardware stack, including extero-
ceptive failures and occasional powertrain issues. An-
ticipating such problems is crucial, as the technology
may encounter errors even under normal conditions,
and exposure to vibrations and lateral forces can fur-
ther accentuate sensor limitations.
Lidar faces challenges, including its high cost,
limitations in mechanical scanning, susceptibility to
disturbances from external light sources, and safety
constraints for the human eye, which curtail its de-
tection distance to approximately 100 meters (Wo-
jtanowski et al., 2014) .The LiDAR used for this
project was from Luminar, the Hydra model (Lumi-
nar, 2021). Various challenges and solutions associ-
ated with LiDAR functioning were identified:
• Delay due to Reflection. A high count of reflec-
tions induced a lag in the LiDAR perception pro-
cess, leading to complications in object recogni-
tion, particularly at high speeds (Betz et al., 2023)
• Banking Angle. The hardware underwent al-
terations to narrow its opening angle on straight
paths and broaden its field of view (FOV) when
negotiating turns. This modification was neces-
sary to address limitations in its vertical FOV, par-
ticularly in response to changing banking angles.
• Scanning Issue. A global positioning method re-
lying on LiDAR encounters difficulties in finding
a scan matching solution at high speeds. There-
fore, integration of two GPS measurements be-
came necessary. (Lee et al., 2023b)
• Driver Crash. The Lidar driver crashed during
the start-up process which caused the lidar to re-
port the last before (Frederick, 2023)
In the context of highly dynamic scenarios involv-
ing ground vehicles, there has been a paucity of aca-
demic research addressing the resilience of localiza-
tion systems under substantial lateral forces. Specifi-
cally, within the domain of autonomous ground vehi-
cle racing, numerous teams relied on conventional lo-
calization methods, including Extended Kalman Fil-
ters (EKF) and Sensor Fusion, as well as pre-existing
packages like Autoware’s Robot Localization (Moore
and Stouch, 2014), which integrates wheel odometry
and Inertial Measurement Unit (IMU) data. Some at-
tempts have also been made to incorporate LiDAR
as a backup localization source. However, due to
computational demands, the reliability of LiDAR at
speeds exceeding 100 mph remains a concern. To
succinctly summarize, the The following sections de-
tail the challenges encountered and the successes
achieved on the racetrack:
• Data Filtering. Different edge cases can cause
inaccurate GPS data which caused early crashed
while testing, for instance one team crashed due
to when the GPS output data showed that the car
rotated 90 degrees between two data points (Fred-
erick, 2023).
• Vibrations. Multiple positioning degradation of
GNSS units due to strong vibration (Lee et al.,
2022) .
• Need of Cellular or Internet Connectivity. Lack
of cellular connectivity introduced several issues
such as the RTK would not receive the correction
values in some areas (Frederick, 2023), this in-
deed is a problem in remote testing track or spe-
cific areas of a large track
• ECU Latency. erroneous hard brake command
was initiated by a hardware Electronic Control
Unit (ECU) module, unrelated to the motion plan-
ner and controller (Raji et al., 2022).
• Tuning Issues. Speed was limited due to a ca-
ble that was attached to the powertrain the system
was not connected, limiting the speed. Addition-
ally, the controller requested full throttle during
race time, and there was oscillation of throttle due
to a non-ideal tuning of the turbocharges and mal-
function of its mechanic (Raji et al., 2023a)
A Qualitative Review of Full Sized Autonomous Racing Vehicle Sensors: A Case Study
315
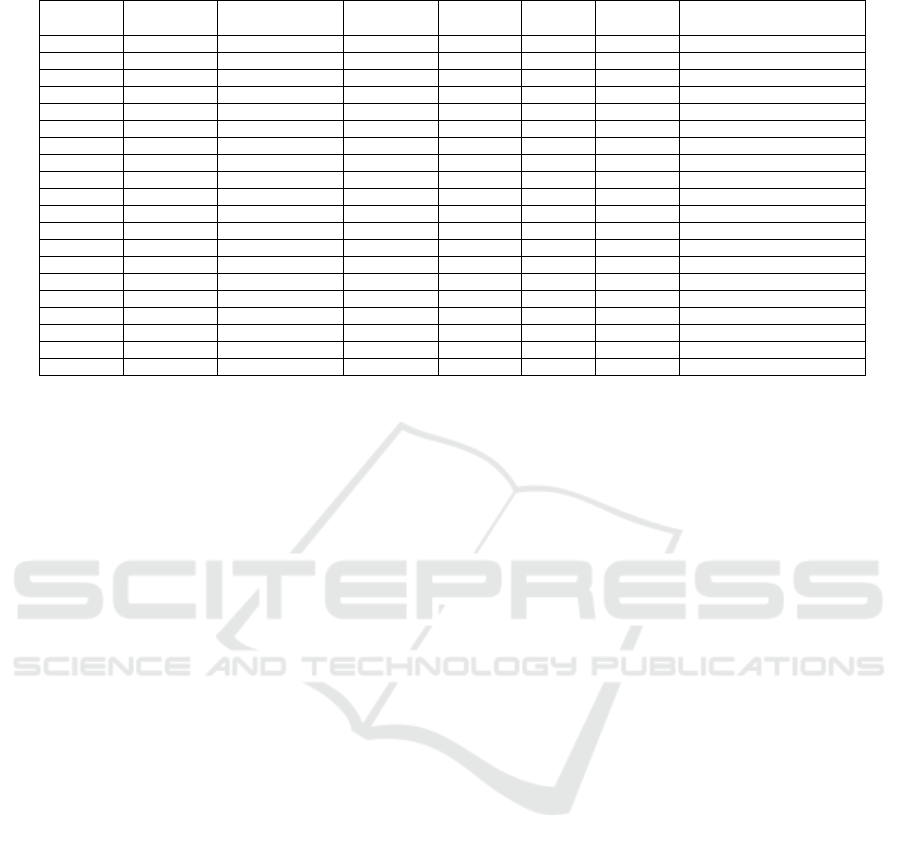
Table 2: Real Time Speed Performance Benchmark.
Group Type Track Speed (kmh) Multiagent Series Car Type Source
TUM Course Formula E 150 No Roborace Devbot 1.0 (Stahl et al., 2019b)
Graz Mix Zala Zone 100 No Roborace Devbot 2.0 (Zubaca et al., 2020)
Graz Road Course Circuit de Croix 162 No Roborace Devbot 2.0 (Schratter et al., 2021)
Pisa Mix Zala Zone 60 No Roborace Devbot 2.0 (Massa et al., 2020)
TUM Road Course Modena 198 No Roborace Devbot 2.0 (Stahl and Diermeyer, 2021)
Roborace Long Strip Elvington Airfield 280 No Roborace Robocar (Roborace, 2019)
TUM Oval IMS 241 No IAC AV-21 (Betz et al., 2023)
Euroracing Oval IMS 180 No IAC AV-21 (Raji et al., 2023a)
KAIST Oval IMS 147 No IAC AV-21 (Lee et al., 2023a)
KAIST Oval LOR 100 No IAC AV-21 (Lee et al., 2023a)
TUM Oval LVMS 270 Yes IAC AV-21 (Betz et al., 2023)
Euroracing Oval LVMS 272 No IAC AV-21 (Raji et al., 2023a)
Euroracing Oval LVMS 226 Yes IAC AV-21 (Raji et al., 2023a)
KAIST Oval TMS 205 Yes IAC AV-21 (Lee et al., 2023a)
KAIST Oval LVMS 248 No IAC AV-21 (Lee et al., 2023a)
KAIST Oval LVMS 212 Yes IAC AV-21 (Lee et al., 2023a)
MIT-PITT Oval IMS 217 No IAC AV-21 (Spisak et al., 2022)
Polimove Long Strip SSC 308 No IAC AV-21 (IAC, 2022)
KAIST Course Monza 200 No IAC AV-21 (Lee et al., 2023a)
Euroracing Course Monza 245 No IAC AV-21 (Raji et al., 2023b)
4 CONCLUSIONS
Both Roborace and IAC faced common challenges
in real-time performance, such as the need for pre-
cise sensor fusion, adaptation to high-speed dynam-
ics, and constant adjustments to hardware limitations.
The robustness of LiDAR and GNSS systems in ex-
treme conditions became a recurring theme. As the
autonomous racing landscape evolves, ongoing real-
time evaluation of these vehicles remains at the fore-
front, posing open questions for the assessment of
real-time frameworks.
This research highlights and identifies recurring
patterns and challenges in past autonomous vehicle
racing platforms, and it is an extension of (Mar et al.,
2024). Specifically, it accentuates controllability in
two competitions involving full-sized racing vehicles
that achieved speeds surpassing 300 km/h. The anal-
ysis uncovers a trend suggesting an upward trajectory
in speed; however, there is no distinct surge in the
number of vehicles participating in multiagent rac-
ing scenarios. Across these studies, it is noteworthy
that no more than two vehicles have been subjected
to real high-speed racing competition. The qualitative
assessment of sensors is based on participant publi-
cations and publicly accessible data. A subsequent
study will explore diverse vehicle sizes, providing a
more quantitative analysis of sensor capabilities in
high-stress and off-road scenarios.
REFERENCES
A2RL (2023). Abu dhabi autonomous racing league. Ac-
cessed: Jan. 16, 2024.
Ahangar, M. N., Ahmed, Q. Z., Khan, F. A., and Hafeez, M.
(2021). A survey of autonomous vehicles: Enabling
communication technologies and challenges. Sensors,
21(3):706.
Ayala, R. and Mohd, T. K. (2021). Sensors in autonomous
vehicles: A survey. Journal of Autonomous Vehicles
and Systems, 1(3).
BBC (2016). Driverless roborace car speeds around don-
ington. https://www.bbc.com/news/av/37214619.
Accessed: Oct. 08, 2023.
Betz, J. et al. (2022). Autonomous vehicles on the
edge: A survey on autonomous vehicle racing. IEEE
Open Journal of Intelligent Transportation Systems,
3:458–488.
Betz, J. et al. (2023). Tum autonomous motorsport: An
autonomous racing software for the indy autonomous
challenge. J Field Robot, 40(4):783–809.
Betz, J., Wischnewski, A., Heilmeier, A., Nobis, F., Stahl,
T., Hermansdorfer, L., Lohmann, B., and Lienkamp,
M. (2019). What can we learn from autonomous level-
5 motorsport? In 9th International Munich Chassis
Symposium 2018: chassis. tech plus, pages 123–146.
Springer.
Buehler, M., Iagnemma, K., and Singh, S. (2009). The
DARPA urban challenge: autonomous vehicles in city
traffic, volume 56. springer.
Caporale, D., Fagiolini, A., Pallottino, L., Settimi, A.,
Biondo, A., Amerotti, F., Massa, F., De Caro, S.,
Corti, A., and Venturini, L. (2018). A planning and
control system for self-driving racing vehicles. In
2018 IEEE 4th international forum on research and
technology for society and industry (RTSI), pages 1–
6. IEEE.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
316

Caporale, D., Settimi, A., Massa, F., Amerotti, F., Corti, A.,
Fagiolini, A., Guiggiani, M., Bicchi, A., and Pallot-
tino, L. (2019). Towards the design of robotic drivers
for full-scale self-driving racing cars. In 2019 In-
ternational Conference on Robotics and Automation
(ICRA), pages 5643–5649. IEEE.
Dow, J. (2017). Roborace pits (wo)man versus autonomous
racing machine around hong kong track. https://electr
ek.co/2017/12/13/roborace-woman-vs-autonomous-r
acing-machine/. Accessed: Oct. 05, 2023.
Fingas, J. (2018). Roborace’s self-driving car isn’t faster
than a human (yet). https://web.archive.org/web/2018
0621015907/https://www.engadget.com/2018/05/14/
roborace-self-driving-car-versus-human/. Accessed:
Oct. 05, 2023.
Frederick, R. (2023). Autonomous Vehicles Handling Anal-
ysis for an Indy Autonomous Challenge Car. PhD the-
sis, The University of Alabama, Tuscaloosa.
IAC (2020). Indy autonomous challenge. https://www.indy
autonomouschallenge.com/.
IAC (2022). Indy autonomous challenge racecar and ream
polimove set new land speed record for autonomous
racecar. [Accessed 22-02-2024].
Kelion, L. (2017). Driverless roborace car crashes at speed
in buenos aires. https://www.bbc.com/news/technol
ogy-39027477. Accessed: Oct. 08, 2023.
Knight, M. and Blendis, S. (2016). Driverless “roborace”
car makes street track debut in marrakech.
Lee, D., Jung, C., Finazzi, A., Seong, H., and Shim, D. H.
(2022). Resilient navigation and path planning system
for high-speed autonomous race car. arXiv preprint
arXiv:2207.12232.
Lee, D., Nam, H., Ryu, C., Nah, S., Moon, S., and Shim,
D. H. (2023a). Enhancing state estimator for au-
tonomous race car: Leveraging multi-modal system
and managing computing resources. arXiv preprint
arXiv:2308.07173.
Lee, D., Nam, H., Ryu, C., Nah, S., and Shim, D. H.
(2023b). Resilient navigation based on multimodal
measurements and degradation identification for high-
speed autonomous race cars. In 2023 IEEE Intelligent
Vehicles Symposium (IV), page 1–8.
Luminar (2021). Hydra. https://levelfivesupplies.com/wp
-content/uploads/2020/08/Luminar-Hydra-Datasheet
.pdf. Accessed: Jan. 02, 2024.
Mar, M., Chellapandi, V., Yuan, L., Wang, Z., and Dietz,
E. (2024). A review of full-sized autonomous racing
vehicle sensor architecture.
Massa, F., Bonamini, L., Settimi, A., Pallottino, L., and
Caporale, D. (2020). Lidar-based gnss denied lo-
calization for autonomous racing cars. Sensors,
20(14):3992.
Moore, T. and Stouch, D. (2014). A generalized extended
kalman filter implementation for the robot operating
system. In Proceedings of the 13th International Con-
ference on Intelligent Autonomous Systems (IAS-13).
Springer.
NVIDIA (2016). Nvidia px2. https://developer.nvidia.com
/drive/px2.
On-Road Automated Driving (ORAD) Committee (2021).
Taxonomy and definitions for terms related to driving
automation systems for on-road motor vehicles. SAE
International.
Raji, A., Caporale, D., Gatti, F., Giove, A., Verucchi, M.,
Malatesta, D., Musiu, N., Toschi, A., Popitanu, S. R.,
Bagni, F., et al. (2023a). er. autopilot 1.0: The full
autonomous stack for oval racing at high speeds. arXiv
preprint arXiv:2310.18112.
Raji, A., Liniger, A., Giove, A., Toschi, A., Musiu, N.,
Morra, D., Verucchi, M., Caporale, D., and Bertogna,
M. (2022). Motion planning and control for multi ve-
hicle autonomous racing at high speeds. In 2022 IEEE
25th International Conference on Intelligent Trans-
portation Systems (ITSC), pages 2775–2782. IEEE.
Raji, A., Musiu, N., Toschi, A., Prignoli, F., Mascaro, E.,
Musso, P., Amerotti, F., Liniger, A., Sorrentino, S.,
and Bertogna, M. (2023b). A tricycle model to ac-
curately control an autonomous racecar with locked
differential. arXiv preprint arXiv:2312.14808.
Renzler, T., Stolz, M., Schratter, M., and Watzenig, D.
(2020). Increased accuracy for fast moving lidars:
Correction of distorted point clouds. In 2020 IEEE In-
ternational Instrumentation and Measurement Tech-
nology Conference (I2MTC), page 1–6.
Roborace (2016). Roborace. Accessed: Oct. 01, 2023.
Roborace (2019). The world’s fastest autonomous car robo-
car guinness world record. [Accessed 22-02-2024].
Sarkar, S. and Mohan, B. (2019). Review on Autonomous
Vehicle Challenges: AICC 2018, pages 593–603.
Schratter, M. et al. (2021). Lidar-based mapping and lo-
calization for autonomous racing. In Proc. Int. Conf.
Robot. Autom.(ICRA) Workshop Opportunities Chal-
lenges Auton. Racing, page 1–6.
Speedgoat (2016). Mobile real-time target machine. https:
//www.speedgoat.com/products-services/real-time-t
arget-machines/mobile-real-time-target-machine.
Spisak, J., Saba, A., Suvarna, N., Mao, B., Zhang, C. T.,
Chang, C., Scherer, S., and Ramanan, D. (2022). Ro-
bust modeling and controls for racing on the edge.
arXiv preprint arXiv:2205.10841.
Stahl, T. and Diermeyer, F. (2021). Online verification en-
abling approval of driving functions—implementation
for a planner of an autonomous race vehicle. IEEE
Open Journal of Intelligent Transportation Systems,
2:97–110.
Stahl, T., Wischnewski, A., Betz, J., and Lienkamp, M.
(2019a). Multilayer graph-based trajectory planning
for race vehicles in dynamic scenarios. In 2019
IEEE Intelligent Transportation Systems Conference
(ITSC), page 3149–3154.
Stahl, T., Wischnewski, A., Betz, J., and Lienkamp, M.
(2019b). ROS-based localization of a race vehicle at
high-speed using lidar. In E3S Web of Conferences,
volume 95, page 04002. EDP Sciences.
Tumeo, A., Ceriani, M., Palermo, G., Minutoli, M., Castel-
lana, V., and Ferrandi, F. (2017). Chapter 3 - real-time
considerations for rugged embedded systems. In Vega,
A., Bose, P., and Buyuktosunoglu, A., editors, Rugged
A Qualitative Review of Full Sized Autonomous Racing Vehicle Sensors: A Case Study
317

Embedded Systems, pages 39–56. Morgan Kaufmann,
Boston.
Wojtanowski, J. et al. (2014). Comparison of 905 nm
and 1550 nm semiconductor laser rangefinders’ per-
formance deterioration due to adverse environmental
conditions. Opto-Electronics Review, 22(3).
Yeong, D. J., Velasco-Hernandez, G., Barry, J., and Walsh,
J. (2021). Sensor and sensor fusion technology in au-
tonomous vehicles: A review. Sensors, 21(6):2140.
Zhu, Q. et al. (2021). Control informed design of the
IAC autonomous racecar for operation at the dynamic
envelope. In Proc. Int. Conf. Robot. Autom.(ICRA)
Workshop Opportunities Challenges Auton. Racing,
page 1–7.
Zubaca, J., Stolz, M., and Watzenig, D. (2020). Extended h
filter adaptation based on innovation sequence for ad-
vanced ego-vehicle motion estimation. In 2020 IEEE
3rd Connected and Automated Vehicles Symposium
(CAVS), pages 1–5. IEEE.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
318
