
Energy and Cost-Aware Real-Time Task Scheduling with
Deadline-Constraints in Fog Computing Environments
Mayssa Trabelsi
a
and Samir Ben Ahmed
b
LIPSIC Laboratory, Faculty of Sciences of Tunis, University of Tunis ElManar, Tunis, Tunisia
Keywords:
Internet of Things (IoT), Fog Computing, Task Scheduling, Real-Time, QoS Optimization.
Abstract:
With the increasing demand for real-time processing for IoT applications, Fog computing becomes a crucial
approach to overcome the limitations of centralized Cloud Computing. Given its decentralized structure, Fog
computing enables faster response time, real-time processing, and reduced latency, making it particularly
suitable for time-sensitive IoT applications. In this paper, we propose a novel approach called the ”Energy-
cost-aware task scheduling with a Deadline-constrained” (ECaTSD) algorithm for real-time task scheduling
in a fog infrastructure. The main objective of the proposed algorithm is to minimize energy consumption
and monetary costs under deadline constraints. The ECaTSD algorithm dynamically allocates incoming tasks
to the most suitable fog nodes in real-time. It selects the fog node that meets deadline requirements with
the least energy consumption and monetary cost in the infrastructure. Moreover, the proposed algorithm has
been simulated using the iFogSim simulator. The algorithm’s performance is evaluated using various criteria,
such as the percentage of IoT tasks successfully meeting deadlines, energy consumption, monetary cost, and
response time compared to other scheduling policies. ECaTSD algorithm shows high efficiency in meeting
deadlines (99.58% completion rate) while being energy and cost-efficient.
1 INTRODUCTION
The evolution of smart devices, incorporating com-
munication technologies and advanced processing ca-
pabilities, has given rise to an innovative paradigm
known as the Internet of Things (IoT) (Dabiri et al.,
2022). Projections indicate that the number of IoT de-
vices worldwide may surpass 29 billion by the year
2030 (Vailshery, 2024). As a result, generating a
large volume of real-time data often requires inten-
sive computational processing within strict time con-
straints (Stavrinides and Karatza, 2019) (e.g., Health-
care and traffic monitoring IoT devices and sensors)
(Stavrinides and Karatza, 2019) (Dabiri et al., 2022).
However, due to the computational capability limita-
tions of IoT devices, they offload their task requests to
external devices, such as servers (Dabiri et al., 2022).
IoT devices require real-time responses and low la-
tency, making cloud computing less suitable for time-
sensitive IoT tasks. This is primarily due to the high
communication delay between IoT devices and the
cloud servers (Azizi et al., 2022).
a
https://orcid.org/0000-0002-1723-9486
b
https://orcid.org/0000-0002-4642-2108
Fog Computing (FC) has emerged as a new
paradigm, extending the Cloud Computing paradigm
to the edge of the network, near where real-time
IoT data is generated, (Peter, 2015). FC is a dis-
tributed computing paradigm that serves as an inter-
mediary layer between the cloud and IoT devices.
It provides cloud servers’ computational and storage
services closer to the network’s edge (Dabiri et al.,
2022).
The FC paradigm has heterogeneous computa-
tional resources that can be virtualized, similar to
cloud computing (Stavrinides and Karatza, 2019).
Consequently, a Fog Node (FN) can be a Virtual
Machine (VM) (Group et al., 2016). Also, FC in-
volves various devices such as embedded servers, cel-
lular base stations, switches, access points, routers,
gateways, and surveillance cameras. However, the
computational capacity of resources, including pro-
cessing power (CPU), storage, and memory in a fog
layer, is generally limited compared to that in the
cloud (Stavrinides and Karatza, 2019). Therefore,
task scheduling becomes a challenge when choosing
suitable resources while maintaining Quality of Ser-
vice (QoS), considering the diverse characteristics of
each task and the heterogeneity of resources essential
434
Trabelsi, M. and Ben Ahmed, S.
Energy and Cost-Aware Real-Time Task Scheduling with Deadline-Constraints in Fog Computing Environments.
DOI: 10.5220/0012637600003687
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2024), pages 434-441
ISBN: 978-989-758-696-5; ISSN: 2184-4895
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

for processing time-sensitive tasks in a fog computing
environment (Jamil et al., 2022).
When developing algorithms to address the task
scheduling problem, it is crucial to consider QoS met-
rics such as latency, response time, energy consump-
tion, and cost to optimize performance and satisfy
the timing constraints of IoT applications. The task
scheduling problem comes under NP-Hard problems,
which become more complex with increased sensors
and FNs. (Jamil et al., 2022).
In recent years, many research efforts have pro-
posed scheduling algorithms for optimizing various
performance metrics to achieve high QoS (Sharma
et al., 2023)(Jayasena and Thisarasinghe, 2019)(Xu
et al., 2020)(Dabiri et al., 2022)(Sultan Hajam,
2024)(Hoseiny et al., 2020). The authors in (Sharma
et al., 2023) proposed an approach to address task
scheduling, considering various metrics such as en-
ergy consumption, latency time, cost, and network us-
age. An algorithm based on ant colony optimization is
proposed in (Xu et al., 2020) to solve the task schedul-
ing problem to reduce energy consumption while sat-
isfying the task deadline. The authors in (Jayasena
and Thisarasinghe, 2019) proposed a task scheduling
method in a fog computing environment considering
energy consumption and cost of execution. A sys-
tem model was proposed in (Dabiri et al., 2022) to
address the job scheduling problem, aiming to jointly
minimize the total deadline violation time of IoT jobs
and the system’s energy consumption. The authors in
(Sultan Hajam, 2024) proposed an algorithm to min-
imize the monetary cost while considering the dead-
line requirements and priority of tasks. A real-time
task scheduling algorithm was proposed in (Hoseiny
et al., 2020) to minimize IoT users’ computation costs
and reduce provider violation costs.
This paper presents an online scheduling algo-
rithm called the ”Energy-cost-aware task scheduling
with a Deadline-constrained ” (ECaTSD) algorithm
designed for scheduling real-time tasks in fog infras-
tructure (FI). The ECaTSD algorithm provides multi-
objective optimization of task scheduling to optimize
performance metrics, such as energy consumption,
monetary cost, and the percentage of IoT tasks that
successfully meet their deadline. It is implemented in
the iFogSim simulator (Gupta et al., 2017) and com-
pared with Random, Shortest Execution Time (SET),
Power of Two Choices (Po2C), and Greedy for En-
ergy (GfE) algorithms.
The major contribution of this paper can be sum-
marized as follows.
• A scheduler for dynamically assigning tasks in
each region of a hierarchical FI is developed.
• We formulate the task scheduling problem as
a Mixed Integer Linear Programming (MILP)
model to optimize the FNs’ total energy consump-
tion and cost while meeting the task deadlines.
• We have proposed a dynamic heuristic algorithm
to solve the real-time task scheduling problem to
optimize multiple objective metrics, reducing en-
ergy consumption and minimizing monetary cost
under deadline constraints.
• We have evaluated the performance of the pro-
posed algorithm with the iFogSim compared with
Random, Shortest Execution Time (SET), Power
of Two Choices (Po2C), and Greedy for Energy
(GfE) algorithms.
The remainder of the paper is organized as follows.
Section 2 presents the proposed architecture and prob-
lem formulation. Section 3 describes the proposed al-
gorithm. Finally, we evaluate the proposed solution
in Section 4 and conclude the paper in Section 5.
2 SYSTEM MODEL AND
PROBLEM FORMULATION
This section outlines the proposed approach for real-
time task scheduling in fog computing. The proposed
architecture is presented followed by the formulation
of the problem.
2.1 Proposed Architecture
Many studies highlight the importance of geograph-
ical location for optimizing the performance of IoT
applications (van der Zee and Scholten, 2013) (Naas
et al., 2017). Our architecture is inspired by the work
of (Naas et al., 2017) in which a strategy was pro-
posed to place IoT data on a FI to reduce the overall
latency in large-scale applications. Indeed, the au-
thors introduced a heuristic approach, iFogStorZ, to
minimize the problem-solving time by relying on ge-
ographical location as a partitioning criterion. In this
work, we adopt their solution due to its significant re-
duction of the problem-solving time. They opted to
define Regional Point of Presence (RPOP) (FNs lo-
cated in layer three (FL2) that are illustrated in our
proposed approach (see Fig. 1)) as points of parti-
tioning. Hence, the maximum number of partitions
corresponds to the number of FNs located in layer
three. However, FNs located in layer three can also
be grouped to form a specific zone. In this paper, we
choose to place a scheduler for each zone.
The architecture of a fog computing infrastructure
consists of three layers: IoT devices layer, fog com-
Energy and Cost-Aware Real-Time Task Scheduling with Deadline-Constraints in Fog Computing Environments
435

Figure 1: Proposed system architecture.
puting layer, and cloud computing layer, as shown
in Fig.1 (Azizi et al., 2022)(Jamil et al., 2020)(Khan
et al., 2022) .
• First layer (IoT devices): The first layer includes a
large number of IoT devices, such as sensors and
actuators. Sensors collect lots of time-sensitive
data from the real world, demanding real-time
processing, and offload them through gateways to
appropriate fog/cloud nodes. The outputs of FNs
are sent back as results to actuators, who take nec-
essary actions within a specified deadline.
• Fog Layer: The fog layer is an intermediary
tier between IoT devices and the cloud layer.
It includes fog gateways, a scheduler, and FNs.
The FNs are responsible for executing IoT tasks.
However, they have limited computing, commu-
nication, and storage capabilities.
• Cloud Layer: The cloud is the top layer of the ar-
chitecture. It is composed of powerful VMs with
high computing power and storage capacity.
2.2 Problem Formulation
In this subsection, we formulate the multi-objectives
problem of assigning real-time tasks in a hierarchical
FI. First, the basic elements and decision variables of
the optimization problem are introduced. Then, the
response time, energy consumption, and cost formu-
las are described.
2.2.1 Basic Elements
Let n independent real-time tasks, denoted as T =
{
T
1
, T
2
, . . . , T
n
}
, submitted by IoT devices to the
fog/cloud layer. Each task T
i
∈ T is characterized by
a set of attributes T
i
=
n
T
length
i
, T
deadline
i
, T
in
i
, T
out
i
o
,
where T
length
i
is the CPU length of task in MI (Mil-
lions of Instructions), T
deadline
i
is the task’s deadline
requirement (in ms - milliseconds), T
in
i
is the input
file size (in KB - Kilobytes), T
out
i
is the output file
size (in KB), and N
i
is the network size of the task.
Assume a fog network, denoted as G = (F, L),
which includes several interconnected FNs. In this
context, F =
{
F
1
, F
2
, . . . , F
m
}
represents a set of m
FNs, and L = e
uv
|u, v ∈ F denotes the set of communi-
cation links between nodes in the FI. Each node, rep-
resented as F
j
, has some properties such as the CPU
processing rate (F
cpu
j
) measured in MIPS (MI Per sec-
ond) and the cost of processing per unit of time (C
PT
).
Every link, denoted as e
uv
∈ L, is associated with char-
acteristics including the propagation delay (e
P
u,v
) mea-
sured in ms, the network bandwidth (e
B
u,v
) is measured
in Mbps (Megabytes per second), while its cost (C
Nb
)
is measured in ($) (Dollar).
2.2.2 Decision Variables
Let X
m×n
be the task assignment matrix, where the
binary decision variable x
i, j
means whether the task
T
i
is assigned to a FN F
j
.
x
i, j
=
1, if T
i
is assigned to F
j
( ∀ T
i
∈ T , ∀ F
j
∈ F )
0, Otherwise
(1)
For each task T
i
, we use a binary variable y
uv
i ∈
{0, 1} to indicate whether link e
uv
∈ L is selected for
routing the task T
i
. Thus, we have:
y
i
u,v
=
1, if link e
uv
is chosen for routing T
i
( ∀ u, v ∈ F , ∀ T
i
∈ T )
0, Otherwise
(2)
Finally, we define a binary variable z
i
∈ {0, 1} to
indicate whether the deadline of task T
i
is met. So, we
have:
z
i
=
(
1, if RT
i, j
≤ T
deadline
i
0, Otherwise
(3)
2.2.3 Response Time
The response time RT
i, j
for a given task T
i
is the time
needed to send the task request from an IoT device
to the destination fog or cloud node and receive the
results back. It includes the total transmission time
T
T
, execution time ET
i, j
, and waiting time W
i, j
in the
queue of node F
j
. The execution time ET
i, j
of a task
T
i
on a FN F
j
is calculated using Eq.4, where T
length
i
ENASE 2024 - 19th International Conference on Evaluation of Novel Approaches to Software Engineering
436

represents the length of the ith task T
i
, and F
cpu
j
de-
notes the CPU processing rate of node F
j
.
ET
i, j
=
T
length
i
F
cpu
j
, ∀i ∈ T, ∀ j ∈ F (4)
To calculate the total transmission time T T
Total
i, j
for task T
i
, it is necessary to consider both the prop-
agation delay PD
i, j
and the transmission time T T
i, j
.
The transmission time T T
i, j
is calculated using Eq.5,
where T
in
i
and T
out
i
representing the sizes of the in-
put and output files of task T
i
, and e
B
uv
denoting the
bandwidth between two connected nodes F
u
and F
v
.
T T
i, j
=
∑
∀e
u,v
∈L
T
in
i
+ T
out
i
e
B
uv
× y
i
u,v
, ∀i ∈ T (5)
The propagation delay (Buyya et al., 2009) is the
time required for a bit to travel from the source to the
destination (see Eq.6).
PD
i, j
=
∑
∀e
u,v
∈L
(e
P
uv
× y
i
u,v
), ∀i ∈ T (6)
The total transmission time T T
Total
i, j
can be defined
as the sum of the propagation time and transmission
time (see Eq.7).
T T
Total
i, j
= 2 × PD
i, j
+ T T
i, j
, ∀i ∈ T (7)
Waiting time refers to the duration between task
submission and execution, including the time a task
spends acquiring additional resources or waiting for
specific events (Nikoui et al., 2020). The waiting time
for a task T
k
can be formulated using Eq.8, where T
k
represents any task preceding the task T
i
, whether it is
waiting in the queue or currently running on the node.
W
i, j
=
∑
∀k∈T
∑
∀ j∈F
(ET
k, j
× x
k, j
× x
i, j
), ∀i ∈ T (8)
Therefore, the response time for task T
i
can be for-
mulated (see Eq.9).
RT
i, j
= T T
Total
i, j
+ ET
i, j
+W
i, j
, ∀i ∈ T (9)
We use NT to calculate the number of tasks that
meet their deadlines (see Eq.10).
NT =
∑
∀T
i
∈T
z
i
, ∀i ∈ T (10)
The percentage of IoT tasks meeting the deadline re-
quirement is defined as NT
%
(see Eq.11).
NT
%
=
NT × 100
n
(11)
2.2.4 Energy Consumption
The energy consumed by a Fog device is calcu-
lated in iFogSim, as (Jamil et al., 2020)(Khan et al.,
2022)(Sharma et al., 2023) (see Eq.12).
EC
j
= E
C
+ (T
C
− T
L
) × HP, ∀ j ∈ F (12)
Where E
C
is the current energy consumption, T
C
is the current time, T
L
is the update time of the last
utilization, and HP is the host power in the last uti-
lization.
The total energy consumption is calculated by the
summation of the energy consumed by each FN (see
Eq.13)
E
total
=
∑
∀ j∈F
EC
j
(13)
2.2.5 Cost
The cost represents the overall payment for these re-
source utilization (Nikoui et al., 2020). The costs for
processing, denoted as Cost
E
i, j
, and communication,
Cost
C
i, j
, are described as the following (Yadav et al.,
2022) (Mokni et al., 2023) (Nikoui et al., 2020):
Cost
E
i, j
= ET
i, j
×C
PT
, ∀ j ∈ F, ∀i ∈ T (14)
Cost
C
i, j
= T T
Total
i, j
×C
Nb
, ∀ j ∈ F, ∀i ∈ T (15)
where the C
PT
and C
Nb
represents the cost of pro-
cessing per unit of time price in destination node and
cost of network bandwidth. Hence, the total cost
Cost
i, j
of a task T
i
on a node F
j
is calculated using
Eq.16.
Cost
i, j
= Cost
E
i, j
+Cost
C
i, j
, ∀ j ∈ F, ∀i ∈ T (16)
The total cost is calculated using Eq.17.
Cost
Total
=
n
∑
i=1
m
∑
j=1
Cost
i, j
× x
i, j
(17)
2.2.6 Problem Formulation
We aim to minimize energy consumption and mone-
tary cost while meeting tasks’ deadlines. Therefore,
we formulate our problem mathematically as a multi-
objective optimization problem.
Min : E
Total
+Cost
Total
(18)
With the following constraints:
∑
∀ j∈F
x
i, j
= 1, ∀i ∈ T (19)
x
i, j
, y
i
u,v
, z
i
∈ {0, 1}, ∀i ∈ T, ∀ j ∈ F (20)
RT
i, j
≤ T
deadline
i
, ∀i ∈ T (21)
Energy and Cost-Aware Real-Time Task Scheduling with Deadline-Constraints in Fog Computing Environments
437

Constraint 19 ensures that each task is assigned to
only one FN. Constraint 20 defines the domain of the
decision variables. Finally, constraint 21 ensures that
the deadline for each task must be met.
The task scheduler selects the appropriate comput-
ing node by assigning each node a QoS score. This
selection process ensures the optimization of QoS pa-
rameters: energy consumption and monetary cost.
The QoS score is formulated using Eq.22.
Score
i, j
= w
E
× EC
j
+ w
C
×Cost
i, j
(22)
Where Score
i, j
represents the QoS score of each
task assigned to a computing node, a lower Score
i, j
value indicates that the FN F
j
is more suitable for ex-
ecuting task T
i
. The sum of the weight factors must
be equal to 1, as expressed in Eq.23.
w
E
+ w
C
= 1 (23)
Where w
E
= 0.5 and w
C
= 0.5 are weight fac-
tors representing the substantial impact of the QoS
parameters: energy consumption and cost in a spec-
ified node, respectively.
3 PROPOSED ALGORITHM
In this section, we propose ECaTSD, an energy-cost-
aware task scheduling with a deadline-constrained, al-
gorithm for solving real-time task scheduling prob-
lems in a fog computing infrastructure.
ECaTSD is a dynamic heuristic scheduling algo-
rithm that depends on the states of system resources
and the arrival of real-time tasks. The algorithm is
in online mode, which processes unpredictable, inde-
pendent tasks as they arrive in real-time without hav-
ing complete knowledge of future inputs. It adapts
and makes decisions based on the information avail-
able from the current system status at each step.
The ECaTSD aims to choose FNs with response
times below the task’s deadline. Within this subset
of nodes satisfying the time constraint, the algorithm
assigns the task to the node with the minimum QoS
score, including energy consumption and cost. The
mathematical model uses the QoS score to choose the
optimal node, as per Eq. (22).
The pseudocode of the proposed algorithm is pre-
sented in Algorithm 1. Algorithm 1 introduces the
proposed ECaTSD algorithm designed to address the
task scheduling problem in a fog environment. The
algorithm takes two inputs: a list of the currently in-
coming real-time tasks List
T
i
and the list of the com-
puting nodes List
F
in its zone.
First, three empty lists are generated: L1, L2, and
L3 (line 1).
Algorithm 1: ECaTSD algorithm.
Data: List
T
i
, List
F
Result: T
i
−→ F
j
1 L1:=
/
0 , L2:=
/
0 , L3:=
/
0 ;
2 sort List
T
i
in ascending order of deadline T
i
;
3 foreach T
i
∈ List
T
i
do
4 L1:=
/
0;
5 foreach F
j
∈ List
F
do
6 calculate RT
i, j
using eq.(9);
7 L1 := L1 ∪ RT
i, j
;
8 end
9 L2:=
/
0 ;
10 foreach RT
i, j
∈ L1 do
11 if RT
i, j
≤ T
deadline
i
then
12 L2 := L2 ∪ F
j
;
13 end
14 end
15 L3:=
/
0 ;
16 if L2 ̸=
/
0 then
17 foreach F
j
∈ L2 do
18 calculate EC
j
using eq.(12);
19 calculate Cost
j
using eq.(16);
20 calculate Score
i, j
using eq.(22);
21 L3 := L3 ∪ Score
i, j
;
22 end
23 allocate T
i
on F
j
∈ L3 with the
minimum Score
i, j
;
24 else
25 allocate T
i
on F
j
∈ L1 with the
minimum RT
i, j
;
26 end
27 end
Next, the set of tasks in List List
T
i
is sorted in
ascending order based on their predefined deadlines
(line 2). For each task, the algorithm attempts to find
a suitable FN for the selected task T
i
within the main
loop (lines 3-27). Firstly, the list L1 is reinitialized in-
side the loop (line 4). Subsequently, the second loop
(lines 5-8) calculates the response time of each task
T
i
on each node F
j
and adds them to the List L1. Af-
terwards, the list L2 is reinitialized (line 9), and the
algorithm iterates over the List L1 (line 10), search-
ing among all the FNs to check if a FN F
j
∈ List
F
can
meet the deadline of a task T
i
. If the response time
RT
i, j
on node F
j
is less than the deadline of T
i
, the al-
gorithm adds it to the deadline-satisfied List, i.e., L2
(lines 11-13).
The algorithm reinitializes the List L3 (line 15)
and checks if L2 is not empty, meaning at least one FN
can meet the task’s deadline requirement T
i
. At this
point, the algorithm calculates the energy consump-
tion using Eq.12, cost using Eq.16, and QoS score us-
ENASE 2024 - 19th International Conference on Evaluation of Novel Approaches to Software Engineering
438
ing Eq.22 of each FN, which is then added to the list
L3 (lines 17 to 22). Finally, the task T
i
will be allo-
cated to a FN with the least score Score
i, j
in List L3
(line 23). If the List L2 is empty (no node satisfies the
task’s deadline), the task will be sent to the FN that
has the least response time RT
i, j
(line 25).
4 EXPERIMENTS AND RESULTS
ANALYSIS
In this section, we discuss the performance of the pro-
posed algorithm. The results are compared with other
strategies, and the simulation settings are presented in
subsection 4.1.
To evaluate the performance of the proposed algo-
rithm, we compare it with other baseline algorithms :
(1) Random, (2) Shortest Execution Time (SET) (Dut-
ton et al., 2008), (3) Power of Two Choices (Po2C)
(Hoseiny et al., 2020), and Greedy for Energy (GfE)
(Xu et al., 2020).
4.1 Simulation Setting
The proposed algorithm was implemented in the
iFogSim simulation tool (Gupta et al., 2017), using
the Eclipse IDE environment (version 2023-09). Sim-
ulation experiments were conducted on a PC Intel
with Core i7-2670 CPU 2.20 GHz, 3.7 GB RAM, and
Ubuntu 20.04.5 LTS.
The simulated infrastructure is modeled based on
the architecture shown in Fig.1. We consider eight
IoT devices. Each device has a sensor with a distinct
periodic frequency Freq
i
, a deadline and one actuator.
The infrastructure consists of eight fog gateways in
Fog Level 0 (FL0), as each sensor is connected to a
fog gateway, four FNs in Fog Level 1 (FL1), two in
Fog Level 2 (FL2), and finally, one cloud server in the
cloud layer, equipped with processing power ranging
between 1000 and 40000 MIPS. Table 1 provides the
parameter settings of the fog and cloud nodes. Table
2 presents the parameter settings for IoT tasks.
4.2 Results and Discussion
Here, we present the simulation experiments’ results
with the various settings outlined in subsection 4.1.
In real-time task scheduling in a FI, the proposed
algorithm’s performance is evaluated based on the
percentage of IoT tasks that successfully meet their
deadlines NT
%
.
Further, the evaluation considers the average en-
ergy consumption (in MJ) on FNs, the average mon-
etary cost ($) on FNs, the average response time (ms)
Table 1: Parameter settings for computing nodes.
Parameter Value
Rate per MIPS at FN 0.00
Rate per MIPS at Cloud 0.01
Latency from fog to cloud layers (ms) 1200
Latency in fog layer (ms) [50-500]
Latency from device to fog layers (ms) 10
C
PT
on cloud per time unit ($/s) [1- 2]
C
PT
on fog per time unit ($/s) [0.2-0.5]
C
NB
at fog per data unit ($/s) [0.01-0.02]
C
NB
at cloud per data unit ($/s) [0.05-0.01]
Propagation delay between FNs (ms) [1 - 3]
Bandwidth of communication links (Mbps) [100-1000]
Table 2: Characteristics of IoT tasks.
Parameter Range of values
Number of instructions (MI) [80000 - 300000]
Deadline (ms) [2000 - 2500]
Frequency (ms) [50 - 280]
Input file size (kb) [50000 - 150000]
Output file size (kb) 3
of IoT devices, and the system’s execution time (in
ms).
x
i, j
in LF1 indicates the percentage of tasks as-
signed to LF1, while x
i, j
in LF2 indicates the percent-
age of tasks assigned to LF2. Table 3 lists the perfor-
mance results of the ECaTSD and other algorithms
concerning deadline constraints and QoS metrics.
The results show that our algorithm ECaTSD ef-
fectively performs real-time task scheduling, meeting
deadlines for 100% of the tasks. This achievement
surpasses the performance of other algorithms. The
GfE strategy attains a success rate of 78%, the SET
strategy reaches 70%, and the Po2C strategy achieves
47.13%. However, the Random algorithm obtains the
lowest percentage at 41.64%.
The Random strategy exhibits higher energy con-
sumption (0.662 × 10
7
(MJ)) on FNs compared to
Po2C (0.608 × 10
7
(MJ)), SET (0.612 × 10
7
(MJ)),
and ECaTSD (0.623 × 10
7
(MJ)) strategies. In con-
trast, the GfE strategy demonstrates the lowest energy
consumption on FNs (0.599 × 10
7
(MJ)). The in-
creased number of assigned tasks x
i, j
to LF2 increases
the monetary cost. The load balancing between FNs
in LF1 and LF2 may explain the minimal average re-
sponse time observed for the ECaTSD algorithm. The
monetary cost includes not only communication be-
tween the source and destination but also the process-
ing of tasks on node F
j
, taking into account the length
of the task.
The proposed algorithm selects FNs that follow
the deadline constraints. As a result, the cost and
energy results are dependent on these nodes. Fig.2
demonstrates the percentage of tasks that have been
Energy and Cost-Aware Real-Time Task Scheduling with Deadline-Constraints in Fog Computing Environments
439
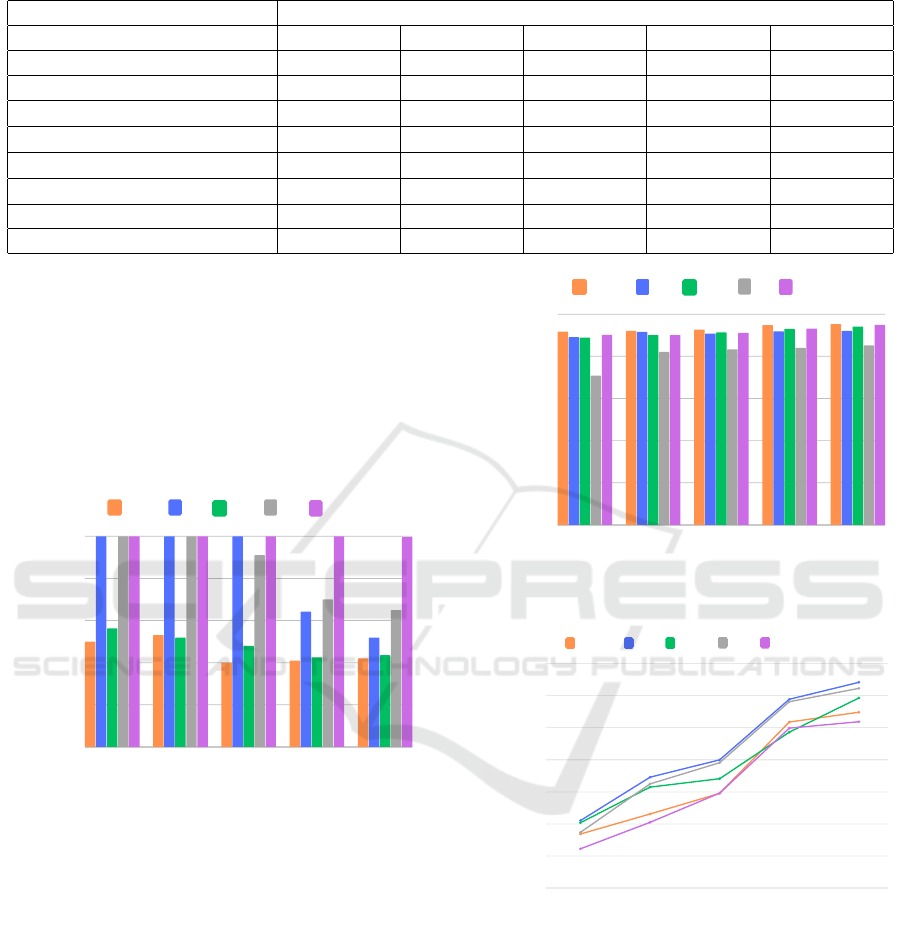
Table 3: QoS parameters’ results of ECaTSD compared to other scheduling algorithms.
Algorithms
Metrics Random SET Po2C GfE ECaTSD
x
i, j
in LF1 (%) 67.33 0 77.8 0 33.91
x
i, j
in LF2 (%) 32.66 100 15.12 100 66.08
NT
%
(%) 41.64 70 47.13 78 100
E
FNs
(MJ) 0.662 * 10
7
0.612 * 10
7
0.608 * 10
7
0.599 * 10
7
0.623 * 10
7
E
Cloud
(MJ) 1.4 * 10
7
1.34 * 10
7
1.342 * 10
7
1.335 * 10
7
1.386 * 10
7
Cost
FNs
($) 7.919 9.6923 7.259 9.0780 6.174
Average Response Time (ms) 1949.625 4570.25 5005.25 4970.25 1805.5
Execution Time (ms) 362 440 368 413 354
assigned successfully and have met their deadlines.
This varies with the number of tasks, and is applica-
ble for all strategies. The SET scheduling algorithm
achieves a 100% task satisfaction rate for up to 200
tasks. Meanwhile, the proposed task assignment ap-
proach achieves a 100% satisfaction rate for up to 400
assigned tasks. Only two tasks fail even when 480
tasks are assigned, resulting in a 99.58% task satis-
faction rate.
80 160 200 400 480
0.000
20.000
40.000
60.000
80.000
100.000
Random
SET
Number of Tasks
Deadline Satisfied Tasks (%)
Po2C
GfE ECaTSD
Figure 2: Percentage of tasks that meet their deadline by
varying task numbers.
Fig.3 shows the average energy consumption of
FNs. The x-axis represents the number of tasks, while
the y-axis shows the total energy consumption in MJ.
As shown, the Random strategy has a higher average
energy consumption compared to other algorithms.
The illustration in Fig.4 shows the variation of
total cost on FNs as the number of tasks changes.
Among the different algorithms, SET appears to be
the most cost-effective as it assigns most tasks to FL1.
On the other hand, the ECaTSD algorithm aims to
balance tasks across layers to meet time constraints,
which leads to an average cost compared to other
algorithms. This approach ultimately increases the
costs.
80 160 200 400 480
0.00000
0.02000
0.04000
0.06000
0.08000
0.10000
Random
SET
Number of Tasks
Total Energy Consumption (MJ)
Po2C GfE
ECaTSD
Figure 3: Total energy consumption by varying task num-
bers.
80 160 200 400 480
0.000
2.000
4.000
6.000
8.000
10.000
12.000
14.000
SET GfEPo2C
Total Cost ($)
ECaTSD
Number of Tasks
Random
Figure 4: Total cost by varying task numbers.
5 CONCLUSION
This paper proposed a Energy-cost-aware task
scheduling with a Deadline-constrained (ECaTSD)
algorithm in Fog Infrastructure. We formulated the
task scheduling problem as multi-objective problem
and solved it using a dynamic heuristic algorithm to
ensure high QoS. ECaTSD aims to allocate the tasks
dynamically and in real-time, on the most suitable
ENASE 2024 - 19th International Conference on Evaluation of Novel Approaches to Software Engineering
440

fog nodes. The algorithm selects all the fog nodes
that satisfy the task’s requirements and then chooses
the node that jointly minimizes the energy consump-
tion and the cost. The proposed algorithm perfor-
mance is evaluated according to the QoS criteria and
compared to other online scheduling policies such as
Random, Shortest Execution Time (SET), Power of
Two Choices (Po2C), and Greedy for Energy (GfE)
algorithms. The results show that ECaTSD has very
encouraging results regarding the percentage of real-
time tasks completed within their deadline, compared
with the other algorithms. In future works, a deep re-
inforcement learning approach could be adopted for
real-time scheduling.
REFERENCES
Azizi, S., Shojafar, M., Abawajy, J., and Buyya, R. (2022).
Deadline-aware and energy-efficient iot task schedul-
ing in fog computing systems: A semi-greedy ap-
proach. J Netw Comput Appl., 201:103333.
Buyya, R., Ranjan, R., and Calheiros, R. N. (2009). Mod-
eling and simulation of scalable cloud computing en-
vironments and the cloudsim toolkit: Challenges and
opportunities. In International conference on high
performance computing & simulation, pages 1–11.
IEEE.
Dabiri, S., Azizi, S., and Abdollahpouri, A. (2022). Opti-
mizing deadline violation time and energy consump-
tion of iot jobs in fog–cloud computing. Neural Com-
puting and Applications, 34(23):21157–21173.
Dutton, R. A., Mao, W., Chen, J., and Watson, W. (2008).
Parallel job scheduling with overhead: A benchmark
study. In International conference on networking, ar-
chitecture, and storage, pages 326–333. IEEE.
Group, O. C. A. W. et al. (2016). Openfog architecture
overview. White Paper OPFWP001, 216:35.
Gupta, H., Vahid Dastjerdi, A., Ghosh, S. K., and Buyya,
R. (2017). ifogsim: A toolkit for modeling and
simulation of resource management techniques in
the internet of things, edge and fog computing en-
vironments. Software: Practice and Experience,
47(9):1275–1296.
Hoseiny, F., Azizi, S., and Dabiri, S. (2020). Using the
power of two choices for real-time task scheduling in
fog-cloud computing. In 4th International Conference
on Smart City, Internet of Things and Applications
(SCIOT), pages 18–23. IEEE.
Jamil, B., Ijaz, H., Shojafar, M., Munir, K., and Buyya, R.
(2022). Resource allocation and task scheduling in fog
computing and internet of everything environments: A
taxonomy, review, and future directions. ACM Com-
puting Surveys (CSUR), 54(11s):1–38.
Jamil, B., Shojafar, M., Ahmed, I., Ullah, A., Munir, K., and
Ijaz, H. (2020). A job scheduling algorithm for delay
and performance optimization in fog computing. Con-
currency and Computation: Practice and Experience,
32(7):e5581.
Jayasena, K. and Thisarasinghe, B. (2019). Optimized task
scheduling on fog computing environment using meta
heuristic algorithms. In IEEE International Confer-
ence on Smart Cloud, pages 53–58. IEEE.
Khan, A., Abbas, A., Khattak, H. A., Rehman, F., Din, I. U.,
and Ali, S. (2022). Effective task scheduling in critical
fog applications. Scientific Programming, 2022:1–15.
Mokni, M., Yassa, S., Hajlaoui, J. E., Omri, M. N., and
Chelouah, R. (2023). Multi-objective fuzzy approach
to scheduling and offloading workflow tasks in fog–
cloud computing. Simulation Modelling Practice and
Theory, 123:102687.
Naas, M. I., Parvedy, P. R., Boukhobza, J., and Lemarchand,
L. (2017). ifogstor: an iot data placement strategy
for fog infrastructure. In IEEE ICFEC, pages 97–104.
IEEE.
Nikoui, T. S., Balador, A., Rahmani, A. M., and Bakhshi,
Z. (2020). Cost-aware task scheduling in fog-cloud
environment. In CSI/CPSSI International Symposium
on RTEST, pages 1–8. IEEE.
Peter, N. (2015). Fog computing and its real time applica-
tions. Int. J. Emerg. Technol. Adv. Eng, 5(6):266–269.
Sharma, O., Rathee, G., Kerrache, C. A., and Herrera-
Tapia, J. (2023). Two-stage optimal task scheduling
for smart home environment using fog computing in-
frastructures. Applied Sciences, 13(5):2939.
Stavrinides, G. L. and Karatza, H. D. (2019). A hybrid ap-
proach to scheduling real-time iot workflows in fog
and cloud environments. Multimedia Tools and Appli-
cations, 78:24639–24655.
Sultan Hajam, S. (2024). Deadline-cost aware task schedul-
ing algorithm in fog computing networks. Inter-
national Journal of Communication Systems, page
e5695.
Vailshery, L. (2023, Accessed: January 11,
2024.). Number of internet of things (iot)
connected devices worldwide from 2019 to
2023, with forecasts from 2022 to 2030.
https://www.statista.com/statistics/1183457/iot-
connected-devices-worldwide/.
van der Zee, E. and Scholten, H. (2013). Application of
geographical concepts and spatial technology to the
internet of things. Research Memorandum, 33.
Xu, J., Sun, X., Zhang, R., Liang, H., and Duan, Q.
(2020). Fog-cloud task scheduling of energy con-
sumption optimisation with deadline consideration.
International Journal of Internet Manufacturing and
Services, 7(4):375–392.
Yadav, A. M., Tripathi, K. N., and Sharma, S. (2022). A
bi-objective task scheduling approach in fog comput-
ing using hybrid fireworks algorithm. The Journal of
Supercomputing, 78(3):4236–4260.
Energy and Cost-Aware Real-Time Task Scheduling with Deadline-Constraints in Fog Computing Environments
441
