
CARISMA: CAR-Integrated Service Mesh Architecture
Kevin Klein
1,2 a
, Pascal Hirmer
1 b
and Steffen Becker
2 c
1
Mercedes-Benz AG, Sindelfingen, Germany
2
Institute of Software Engineering, University of Stuttgart, Stuttgart, Germany
{firstname.lastname}@mercedes-benz.com,
{firstname.lastname}@iste.uni-stuttgart.de
Keywords:
Service Mesh, Microservices, Automotive Software Architecture, Service-Oriented Architecture.
Abstract:
The amount of software in modern cars is increasing continuously with traditional electric/electronic (E/E)
architectures reaching their limit when deploying complex applications, e.g., regarding bandwidth or com-
putational power. To mitigate this situation, more powerful computing platforms are being employed and
applications are developed as distributed applications, e.g., involving microservices. Microservices received
widespread adoption and changed the way modern applications are developed. However, they also intro-
duce additional complexity regarding inter-service communication. This has led to the emergence of service
meshes, a promising approach to cope with this complexity. In this paper, we present an architecture applying
the service mesh approach to automotive E/E platforms comprising multiple interlinked High-Performance
Computers (HPCs). We validate the feasibility of our approach through a prototypical implementation.
1 INTRODUCTION
Nowadays, the automotive industry faces an impact-
ful transformation towards Software-defined Vehicles
(SDV), shifting the focus from hardware to software
concerning the primary driver of functionality and
innovation. Hence, the amount of software compo-
nents in modern cars is rapidly growing, which on
the one hand drives new features but on the other
hand comes with a high complexity and the need
for new software architectures. Traditional car ar-
chitectures, which are based on a multitude of ded-
icated Electronic Control Units (ECUs) are not suit-
able anymore to support complex software-driven ap-
plications, such as autonomous driving. In newer ar-
chitectures, a large number of these individual ECUs
will be replaced with more powerful ones, referred to
as High-Performance Computers (HPCs). They offer
more computational resources and decrease the com-
plexity of the E/E architecture in general by transi-
tioning from a great number of individual ECUs to
fewer HPCs connected to smaller ECUs for sensors
and actors (Windpassinger, 2022).
In contrast to traditional car architectures, mostly
relying on protocols like Controller Area Network
a
https://orcid.org/0000-0002-2924-4880
b
https://orcid.org/0000-0002-2656-0095
c
https://orcid.org/0000-0002-4532-1460
(CAN) (Johansson et al., 2005) and Local Intercon-
nect Network (LIN) (Ruff, 2003) for communica-
tion, i.e., to send and receive signals, HPCs employ
modern networking technologies, such as Automo-
tive Ethernet (Matheus and K
¨
onigseder, 2021) en-
abling the migration to Service-Oriented Architec-
tures (SOA) (Lawler and Howell-Barber, 2019) ac-
companied by features like plug-and-play of capabil-
ities provided by services (Kadry et al., 2022). The
software components of an application that is devel-
oped based on SOA can run distributed across the
available HPCs to make full use of the available com-
puting hardware. Through distribution and paral-
lelization, the computing resources of a car can be
used in an optimal fashion and results can be cal-
culated more efficiently. Furthermore, the concrete
distribution of the services across the different HPCs
might change over time or a service might need to be
deployed multiple times to enable load balancing.
In order to achieve such a distribution of appli-
cations, in cloud application development, microser-
vices (Zimmermann, 2016) have been proven as a
well-established pattern. However, they come with
additional complexity, e.g., regarding networking and
inter-service communication. To tackle these issues,
service meshes have been developed, enabling devel-
opers to separate and implement any infrastructure-
related concerns, e.g., service-to-service communica-
tion, in a dedicated layer (Koschel et al., 2021).
336
Klein, K., Hirmer, P. and Becker, S.
CARISMA: CAR-Integrated Service Mesh Architecture.
DOI: 10.5220/0012650300003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 336-343
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

Control Plane
A
D
Config
Te le met ry
B
E
F
C
Data Plane
service
proxy
…
Figure 1: Example applying the traditional service mesh
architecture. Figure adopted with minor modifications from
(Li et al., 2019).
Figure 1 shows an example application that is im-
plemented in a distributed manner with the individual
services communicating through a classical service
mesh. To this end, each service is accompanied by a
Side-Car Proxy, forming the Data Plane. The proxy
is responsible for routing requests from and to the ser-
vice based on the configuration it receives from the
configuration source that is part of the Control Plane.
Whenever a new service is deployed or re-deployed to
a different location, the configuration source updates
the configuration of the proxies accordingly.
Furthermore, the Control Plane has additional re-
sponsibilities, e.g., processing telemetry data col-
lected by the proxies and forwarded accordingly.
However, the application of service meshes to
modern cars also comes with a multitude of chal-
lenges. Especially, the resource limitation and limited
flexibility in in-car architectures require an adaptation
of the service mesh architecture to meet the specific
requirements of cars. These challenges are currently
not addressed by state-of-the-art approaches.
To achieve a flexible distribution of services
across different HPCS, in this paper, we present
CARISMA – an in-car service mesh architecture aim-
ing at applying the concept of service meshes that has
been proven very effective in distributed cloud appli-
cation development to the automotive domain. In this
manner, we aim to benefit from the characteristics of
service meshes to build distributed but still stable in-
car applications. Furthermore, we address the afore-
mentioned challenges concerning the application of
service meshes to modern cars. Finally, we validate
the feasibility of our CARISMA approach through a
prototypical validation.
Figure 2 shows an application that is designed in a
distributed manner, with the individual software com-
ponents being spread across three HPCs. The com-
munication between the services is handled by our
CARISMA approach. To this end, one HPC is elected
as the central HPC and hosts the Control Plane. Also,
we only employ one proxy per HPC that handles all
Control Plane
Data Plane
A
D
G
Config
…
B
I
E
F
C
Central HPC
Satellite HPC 1
Satellite HPC n
Data Plane Data Plane
service
proxy
In-Car
Figure 2: Example applying CARISMA.
incoming and outgoing service traffic for that HPC.
With the approach presented in this paper, we aim
to reduce the complexity associated with the inter-
service communication of distributed in-car applica-
tions. Moreover, we strive to enable a flexible re-
deployment of services between individual HPCs and
even load balancing of traffic between different in-
stances of the same service independent of the con-
crete HPC they run on. Also, we aim to enable an
easy integration of services that run within the cloud
or even on edge devices.
The remainder of this paper is structured as fol-
lows: Section 2 outlines related work, whereas Sect. 3
presents CARISMA, the main contribution of this pa-
per, followed by a description of our validation based
on a prototypical implementation in Sect. 4. Finally,
in Sect. 5, we conclude with a summary and outline
of future work.
2 RELATED WORK
In this section, we introduce related work in the scope
of this paper. We examined AUTOSAR
1
Adaptive
as well as COVESA
2
since they are relevant ap-
proaches introduced by the automotive industry with
AUTOSAR being the de facto standard among the big
automotive vendors. Furthermore, we looked at simi-
lar approaches introduced by the research community
within the field of automotive software engineering
and edge computing.
Automotive Open System Architecture (AU-
TOSAR) is a partnership of leading automotive-
related companies that defines a reference architec-
ture for ECU software, which most manufacturers
adopt. In 2017, AUTOSAR introduced a new, co-
existing platform, AUTOSAR Adaptive, designed
for modern automotive software with demand for
high-performance computing, e.g., autonomous driv-
1
AUTOSAR: https://autosar.org
2
COVESA: https://covesa.global
CARISMA: CAR-Integrated Service Mesh Architecture
337

ing. Part of that platform is a communication man-
agement (AUTOSAR, 2022c) that provides intra-
machine and inter-machine service-oriented commu-
nication between applications running on the AU-
TOSAR Runtime for Adaptive Applications (ARA).
To this end, establishing communication between ser-
vices and clients can happen statically at design time
or dynamically at system start or runtime. Based
on a service interface definition, a generator creates
C++ classes representing a service and a client, re-
spectively (AUTOSAR, 2022a). Moreover, before
services and clients can be bound dynamically, they
must register with a service registry provided as part
of ARA. Finding a service that is offered through the
service registry is based on the generated classes and
results in zero or more handles that can be used to es-
tablish the connection. In contrast, our approach does
not rely on a service interface definition for establish-
ing a communication path. Furthermore, CARISMA
does not require the clients to query the service reg-
istry and initiate the service connection based on the
returned handles. This enables changing the targeted
service instance dynamically, e.g., to support load bal-
ancing between different service instances or to sup-
port moving a service instance from one HPC to an-
other for optimization reasons without having the ser-
vices to be aware of that change. Also, the integration
of services that do not run on our platform, i.e., cloud
services, is well supported by our approach.
The Connected Vehicle Systems Alliance
(COVESA), formerly known under the name
GENIVI Alliance, is an open development com-
munity that aims to develop open standards and
technologies for connected vehicles, primarily focus-
ing on leveraging vehicle data and vehicle-to-cloud
connectivity. COVESA provides a standardized
application programming interface (API) for the
development of distributed, middleware-based appli-
cations named CommonAPI. Similar to AUTOSAR,
a generator creates the proxy implementation and
service skeleton as C++ classes based on a service in-
terface definition file (COVESA, 2017). Furthermore,
some binding-specific code is generated, which is
responsible for realizing the communication between
a client and the service regarding a specific supported
middleware technology, i.e., as of now D-Bus (Love,
2005) or Scalable service-Oriented MiddlewarE over
IP (SOME/IP) (AUTOSAR, 2022b). The binding-
specific code library is loaded when a proxy is created
by the client application. Contrasting to CARISMA
but similar to the approach chosen by AUTOSAR,
this approach is based on generated code, which
depends on the CommonAPI runtime library and a
library containing generated binding-specific code.
Consequently, breaking changes to the application
binary interface (ABI) of the CommonAPI runtime
library will require a recompilation of the dependent
applications. Furthermore, choosing a specific ser-
vice instance before creating the proxy and initiating
the remote procedure call is the responsibility of the
client application, making it impossible to implement
load balancing strategies.
Wagner et al. (Wagner et al., 2016) introduce em-
bedded Service-Oriented Communication (eSOC), a
service-oriented communication protocol for CAN.
They utilize a service descriptor to encode meta in-
formation related to SOA. Since the service descrip-
tor has a size of 64 bit and is thus quite large in com-
parison to the bandwidth and payload size supported
by CAN, eSOC employs a short identifier that is re-
ceived upon service initialization and will be used fur-
ther on. That short identifier is compatible in length
with the standard CAN identifier and therefore intro-
duces no overhead. Concerning communication pat-
terns, eSOC supports publish/subscribe as well as re-
quest/response. However, since our approach targets
HPCs that are connected by a high-speed communica-
tion technology, i.e., automotive ethernet, instead of
microcontrollers, an architecture built on top of CAN
is not suitable.
Li et al. (Li et al., 2022) propose a service mesh
architecture designed to be applied in edge native
computing. They argue that a plain service mesh with
a Control Plane that consists of only a single con-
troller is unsuitable for the edge because a broad dis-
tribution and a comparatively long inter-server com-
munication delay are key characteristics. Hence, they
propose to distributively deploy controllers that alto-
gether form the Control Plane in order to avoid the
single controller becoming a bottleneck. A drawback
of that approach is the cost that results from keep-
ing all the involved controllers synchronized. Conse-
quently, they investigated how to deploy these con-
trollers in a cost efficient way and present a cus-
tomized k-means based algorithm for cost minimiza-
tion. CARISMA, however, is designed for an envi-
ronment comprising multiple HPCs that are closely
located to one another. Therefore, a broad distribution
and a delay in communication are no concerns. Dis-
tributively deploying multiple controllers would in-
troduce an unnecessary overhead resulting in higher
resource consumption that can be avoided.
Furusawa et al. (Furusawa et al., 2022) propose
a method that employs a service mesh based on Is-
tio
3
spanning multiple independent Kubernetes
4
clus-
ters to achieve a cooperative load balancing among
3
Istio: https://istio.io/
4
Kubernetes: https://kubernetes.io
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
338

co-located edge servers. Their goal is to reduce the
loss of performance and the number of outages be-
cause of overloads. To this end, they employ a ser-
vice mesh controller that monitors the number of re-
quests for apps running on the edge servers. In case
that number exceeds a certain threshold, the edge
server’s app is considered overloaded and another
edge server with free capacities is selected. The rout-
ing is implemented using Istio’s weight-based routing
with the weight values to forward requests that exceed
the threshold being calculated and transmitted to the
Side-Car Proxies by the service mesh controller. In
summary, the approach assumes an existing service
mesh architecture where every app on an edge server
is accompanied by a Side-Car Proxy and then imple-
ments an extension that enables an optimized distribu-
tion of the request load. In contrast, our paper focuses
on implementing service meshes in a constrained en-
vironment, i.e., the automotive domain.
The presented related work is mainly focusing on
implementing service-oriented architectures within
the automotive domain or on a more general appli-
cation of the service mesh architecture, e.g., within
the context of edge computing. However, our ap-
proach is specifically designed to introduce the ser-
vice mesh architecture to the automotive domain tak-
ing their specific requirements, e.g., a reduced con-
sumption of limited resources, into account. Further-
more, our approach enables the application of meth-
ods that are known from the field of cloud applica-
tion development, i.e., load-balancing and dynamic
re-deployment of software components. Additionally,
with CARISMA, the integration of services that are
running in the cloud becomes possible without requir-
ing them to run on top of a specific software platform.
3 CARISMA
The following section presents the main contribution
of this paper by introducing CARISMA – an architec-
ture that enables in-car applications to run distributed
across a cluster of HPCs and, furthermore, to incorpo-
rate software components that run in the cloud. Fig-
ure 2 depicts an example of applying our approach,
which we refer to as CAR-Integrated Service Mesh
Architecture (CARISMA). It consists of the follow-
ing main components: (i) a Control Plane hosting a
configuration service as well as a node and service
registry service storing meta-information about the
nodes and services, (ii) at least one Data Plane, and
(iii) exactly one service proxy per Data Plane. Com-
pared to the traditional service mesh architecture, we
decided against the Side-Car Proxy pattern, where a
service proxy accompanies every service. Contrary
to the cloud, for an in-car application, resource con-
sumption is crucial. Also, the Side-Car Proxies within
one HPC would not differ in terms of the configura-
tion, making it an avoidable resource consumption.
Hence, we reduced the number of service proxies to
exactly one per HPC. Furthermore, we do not run the
Control Plane on a dedicated node. Instead, we dif-
ferentiate between a central HPC that receives a coor-
dinative role and hosts the Control Plane next to the
Data Plane and satellite nodes, which are Data Planes
only. Again, the reason for this design choice is that
resource consumption is crucial and we cannot afford
a dedicated node running only the Control Plane due
to the resource limitations within vehicles.
In a first step, every HPC has to register with the
node registry service. As a result of this step, every
HPC receives a unique node identifier which can then
be used for service registration. As soon as a service
is registered, it will become available through the ser-
vice proxies. The individual steps are elaborated in
the following subsections.
3.1 Node Registration
The Control Plane needs to be aware of the nodes, i.e.
the HPCs, and their IP addresses which can be used to
call services running on these nodes. To this end, we
employ a node registry as part of the Control Plane. In
a first step, a node announces its availability by send-
ing a registration request containing its IP address in
the request body to the node registry. The node reg-
istry maintains a mapping of a unique identifier and
the IP address which the node submitted upon regis-
tration. Whenever a registration request is received,
a unique identifier is generated randomly, stored to-
gether with the IP address, and is finally returned to
the caller as a response to the request.
The unique identifier is used consistently across
the entire configuration of the Control Plane. There-
fore, it must be attached to every subsequent request,
e.g., to update the service registry, via a dedicated re-
quest header. To ensure a valid configuration, the sub-
mitted unique node identifier is validated each time
such a request is received.
3.2 Service Registration
Based on the information that is stored as part of the
node registry, a per-node configuration can be gener-
ated and transmitted to the connected service prox-
ies of the nodes. To this end, the information need
to be enriched by the services that actually run on
the nodes. Therefore, we furthermore employ a ser-
CARISMA: CAR-Integrated Service Mesh Architecture
339

vice registry as part of the Control Plane. Whenever
a service is deployed or undeployed, the correspond-
ing node, i.e, the HPC where the deployment or un-
deployment happened, has to update the service reg-
istry by sending a service registration request. Again,
when sending these requests, the unique node iden-
tifier that has been received during node registration
needs to be attached to the request via a dedicated
request header. Whenever the service registry is up-
dated, the Control Plane generates a new configura-
tion snapshot and transmits it to the connected ser-
vice proxies. Considering the configuration that is
transmitted to the nodes, we differentiate between two
configuration views:
3.2.1 Local Configuration View
This view maps all the services running on the same
node to the IP address of the local machine and the
corresponding port they are listening on.
3.2.2 Global Configuration View
This view maps all services to the IP address of the
node they are running on and the port of the ingress
listener of the corresponding service proxy.
Both views are node-specific, i.e., they do not
contain the same information on every HPC. For the
global configuration view, the services running on the
same node, i.e., that are contained within the local
configuration view, are discarded.
Every service proxy comprises two listeners: (i)
the ingress listener routing incoming traffic from
other nodes to the desired local service and (ii) the
egress listener routing outgoing traffic initiated by lo-
cal services to their desired target service on the same
or another node. The ingress listener is configured
with the local configuration view and the egress lis-
tener is configured with the local configuration view
merged with the global configuration view. As de-
scribed earlier, before merging the local configuration
view with the global configuration view in order to
attach it to the egress listener, the services contained
within the local configuration view are discarded from
the global configuration view. Otherwise, the exact
same service would be mapped to different IP ad-
dresses resulting in an invalid configuration.
3.3 Service-to-Service Communication
As soon as the nodes and services are registered,
the inter-service communication becomes possible
through the egress listener of the corresponding ser-
vice proxy. In case the desired service is located
on the same node, the request is routed to the local
port on which the service listens. If, on the other
hand, the service is located on a different node, the
request is routed through the ingress listener of the
service proxy that belongs to the corresponding target
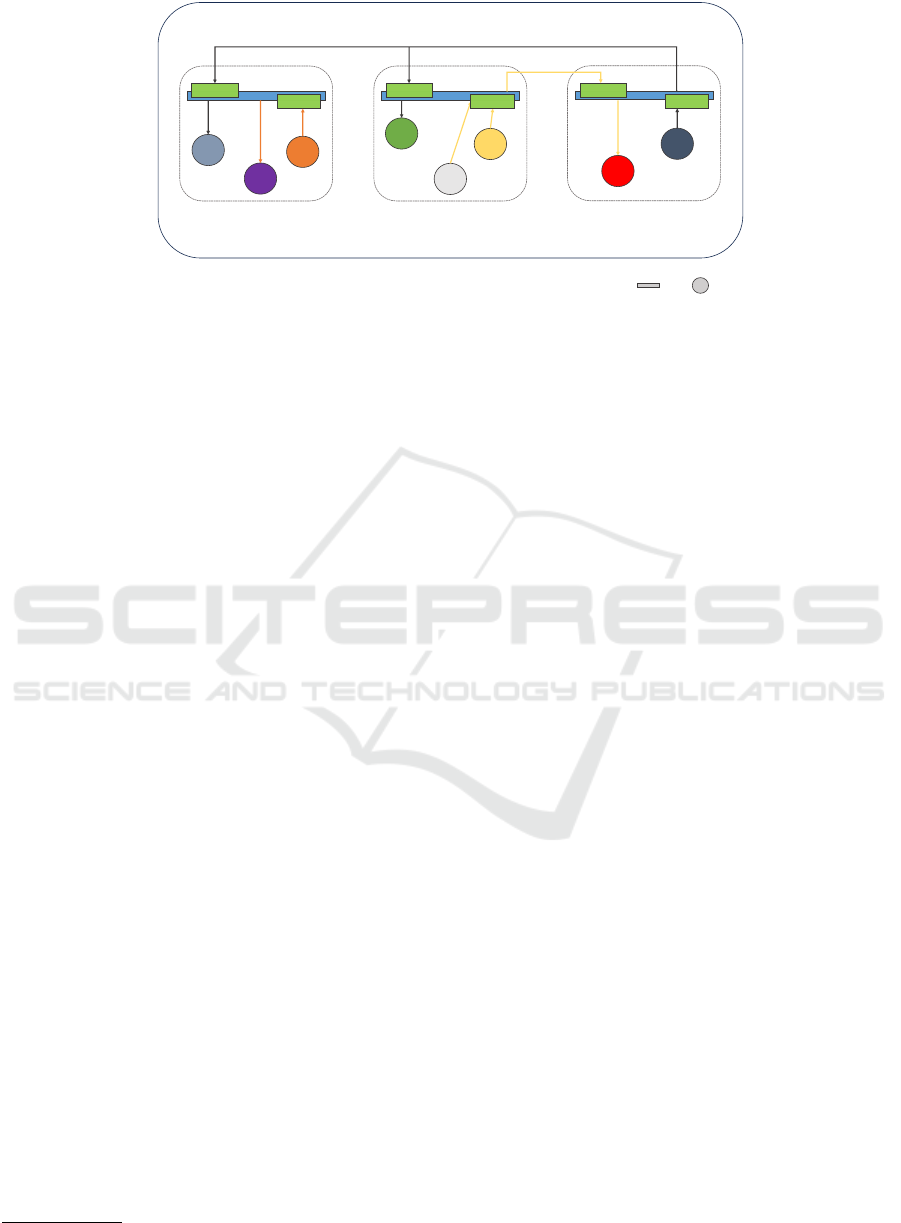
node. Figure 3 depicts typical communication scenar-
ios: (i) communication involving services that both
run on the same node (G -> D), (ii) communication
that spans across different nodes and, in addition, is
balanced between two instances of the desired target
service (A <- C -> B), and (iii) multiple clients re-
questing a single service (E -> F <- I). Note that
it is completely transparent for the caller where the
desired target service is located since the communi-
cation always happens through the egress listener of
the corresponding node. Even if the configuration
changes and the desired target service is moved to an-
other node, the configuration is updated instantly by
the Control Plane and the caller can continue send-
ing requests to the desired target service through the
egress listener of the corresponding node.
Furthermore, CARISMA supports integrating ser-
vices that run in a cloud backend in the same fash-
ion as with services running within the HPC cluster.
To this end, the endpoint that can be used to contact
the cloud backend, e.g., an API gateway, needs to be
registered as a node with the node registry. In con-
sequence, it will receive a unique node identifier that
can be used in subsequent requests. Furthermore, the
concrete cloud service needs to be registered with the
service registry. It will then be available through the
egress listeners of the nodes’ service proxies within
the HPC cluster.
4 PROTOTYPICAL VALIDATION
To validate our approach, we implemented a proof of
concept application comprising the following compo-
nents: (i) a Control Plane, (ii) a node registry service,
(iii) a service registry service, (iv) a minimalistic or-
chestrator, and (v) three software components (A, B,
C). For the implementation of (i) - (v) we relied on the
Go programming language
5
since it is widely applied
in the field of cloud application development and of-
fers great support concerning frameworks and tool-
ing. Moreover, we chose the gRPC framework
6
for
communication because it is widely applied too and,
furthermore, allows the implementation of an efficient
and language-independent communication based on a
strongly typed interface definition.
To simulate the setup within a car, we provisioned
two virtual machines that are connected by a private
5
Go Programming Language: https://go.dev
6
gRPC: https://grpc.io
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
340
A
D
G
B
I
E
F
C
Central HPC
Satellite HPC 1
Satellite HPC n
proxy
In-Car
egress
ingress
egress
ingress
egress
ingress
service
Figure 3: Typical communication scenarios within CARISMA.
network. Within that private network, every node ex-
poses only the port of its ingress listener to other ma-
chines. One of the two virtual machines has been
chosen to be the central node and was furthermore
connected to a public network in order to expose a
web front-end as part of the software component A.
That web front-end was intended for testing purposes
and displays a value that software component A re-
trieves from software component B. The other virtual
machine was set up as a satellite node. We then de-
ployed (i) - (iv) to the central node and our orchestra-
tor to both nodes. The responsibility of the orches-
trator was to deploy the three software components to
the corresponding nodes according to a node-specific
configuration file. Moreover, the orchestrator was re-
sponsible for the registration and deregistration of ser-
vices upon their deployment and undeployment, re-
spectively. Furthermore, we deployed an instance of
Envoy
7
as service proxy per node and connected it
to the Control Plane hosted on the central node. We
chose Envoy since it is designed with performance
and scalability in mind and offers a dynamic con-
figuration interface that we could implement within
our Control Plane. Our overall validation setup is de-
picted in Figure 4.
In general, our goal was to validate that two soft-
ware components that have been deployed based on
CARISMA can successfully communicate (A -> B).
The third service was employed to validate a proper
routing. Concerning the two communicating software
components, we validated two scenarios: (i) both ap-
plications are running on different nodes, i.e., soft-
ware component B runs on the satellite node, and
(ii) both applications are running on the central node.
Moreover, we ensured by validation that switching the
deployment target of one of the software components
at runtime is possible without a downtime of the other
7
Envoy: https://www.Envoyproxy.io
software component. To this end, we instructed the
minimalistic orchestrator to deploy the second soft-
ware component (B) to the satellite node and ensured
that the setup works as intended. In a second step,
we instructed the minimalistic orchestrator to deploy
that software component to the central node as well
and, upon successful deployment, remove it from the
satellite node. We then ensured that the communi-
cation still works without reconfiguring the software
component A.
Overall, our prototype shows the feasibility of the
CARISMA approach. It was possible to implement
CARISMA with state-of-the-art frameworks, tools,
and programming languages. Furthermore, we suc-
cessfully implemented a distributed application on top
of CARISMA and ensured that changing the deploy-
ment target of a service at runtime does not affect de-
pendent software components.
5 CONCLUSION AND FUTURE
WORK
In this paper, we present an approach to apply ser-
vice meshes to the automotive domain. We introduce
CARISMA, a service mesh architecture that is specif-
ically designed to be applied to multiple interlinked
HPCs. To this end, we differentiate between a cen-
tral node that combines Control Plane and Data Plane
and satellite nodes that are Data Planes only. Fur-
thermore, we require the central node to offer a node
and service registry service such that, in a first step,
nodes can register with the central node to provide it
with their IP address and, in a second step, can reg-
ister and deregister services when they are deployed
or undeployed accordingly. Also, we limit the num-
ber of proxies to exactly one per HPC since multiple
proxies per HPC would carry the same configuration,
CARISMA: CAR-Integrated Service Mesh Architecture
341
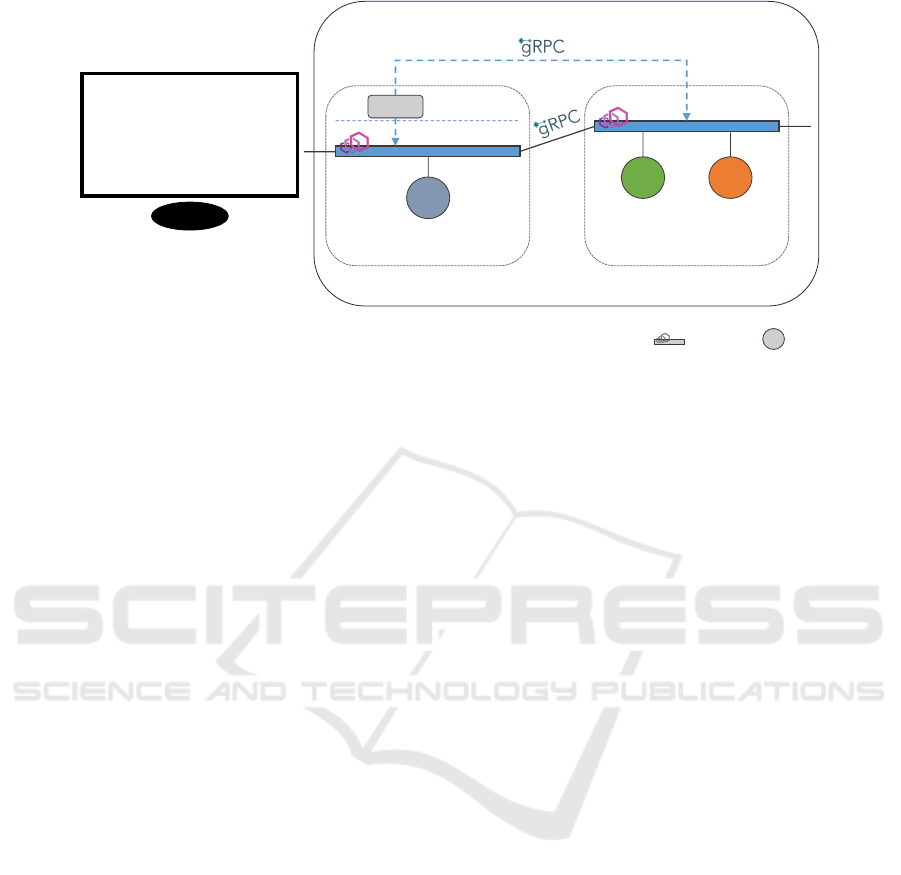
Control Plane
Data Plane
A
Config
Central HPC
Satellite HPC 1
B
Data Plane
service
VM 1
VM 2
C
Envoy proxy
Private Network
Web Front-End
Figure 4: Setup used for validating CARISMA. The minimalistic orchestrator has been left out for a better overview.
and there is no benefit from redundancy at this point.
Our overall goal was to enable automotive applica-
tions to run distributed across different HPCs without
being aware of the actual location of the various in-
volved services. This goal was achieved through our
approach. In future research, we will focus on ex-
tending CARISMA to further leverage the benefits of
service meshes within the automotive domain. Fur-
thermore, we plan to do a sound evaluation of the
overhead that CARISMA introduces in comparison to
direct inter-service communication.
ACKNOWLEDGMENTS
This publication was partially funded by the German
Federal Ministry for Economic Affairs and Climate
Action (BMWK) as part of the Software-Defined Car
(SofDCar) project (19S21002).
REFERENCES
AUTOSAR (2022a). Explanation of ara::com API. Last
accessed on Nov 17, 2023.
AUTOSAR (2022b). SOME/IP Protocol Specification. Last
accessed on Nov 17, 2023.
AUTOSAR (2022c). Specification of Communication Man-
agement. Last accessed on Nov 17, 2023.
COVESA (2017). CommonAPI C++ User Guide. Last ac-
cessed on Nov 17, 2023.
Furusawa, T., Abe, H., Okada, K., and Nakao, A. (2022).
Service mesh controller for cooperative load balanc-
ing among neighboring edge servers. In 2022 IEEE
International Symposium on Local and Metropolitan
Area Networks (LANMAN). IEEE.
Johansson, K. H., T
¨
orngren, M., and Nielsen, L. (2005). Ve-
hicle applications of controller area network. In Hand-
book of Networked and Embedded Control Systems,
pages 741–765. Birkh
¨
auser Boston.
Kadry, H. M., Gupta, A., Lawlis, J. M., and Volpone, M.
(2022). Electrical architecture and in-vehicle network-
ing: Challenges and future trends. In 2022 IEEE Inter-
national Symposium on Circuits and Systems (ISCAS).
IEEE.
Koschel, A., Bertram, M., Bischof, R., Schulze, K., Schaaf,
M., and Astrova, I. (2021). A look at service meshes.
In 2021 12th International Conference on Informa-
tion, Intelligence, Systems & Applications (IISA).
IEEE.
Lawler, J. P. and Howell-Barber, H. (2019). Service-
Oriented Architecture. Taylor & Francis Group.
Li, W., Lemieux, Y., Gao, J., Zhao, Z., and Han, Y. (2019).
Service mesh: Challenges, state of the art, and future
research opportunities. In 2019 IEEE International
Conference on Service-Oriented System Engineering
(SOSE). IEEE.
Li, Y., Zeng, D., Chen, L., Gu, L., Ma, W., and Gao, F.
(2022). Cost efficient service mesh controller place-
ment for edge native computing. In GLOBECOM
2022 - 2022 IEEE Global Communications Confer-
ence. IEEE.
Love, R. (2005). Get on the D-BUS. Linux Journal,
2005(130):3.
Matheus, K. and K
¨
onigseder, T. (2021). Automotive Ether-
net. Cambridge University Press.
Ruff, M. (2003). Evolution of local interconnect net-
work (LIN) solutions. In 2003 IEEE 58th Vehicular
Technology Conference. VTC 2003-Fall (IEEE Cat.
No.03CH37484). IEEE.
Wagner, M., Schildt, S., and Poehnl, M. (2016). Service-
oriented communication for controller area networks.
In 2016 IEEE 84th Vehicular Technology Conference
(VTC-Fall). IEEE.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
342

Windpassinger, H. (2022). On the way to a software-defined
vehicle. 17(7-8):48–51.
Zimmermann, O. (2016). Microservices tenets. 32(3-
4):301–310.
CARISMA: CAR-Integrated Service Mesh Architecture
343
