
Towards a Goal-Oriented Approach for Engineering Digital Twins of
Robotic Systems
Jeshwitha Jesus Raja
a
, Meenakshi Manjunath
b
and Marian Daun
c
Center of Robotics, Technical University of Applied Sciences W
¨
urzburg-Schweinfurt, Schweinfurt, Germany
Keywords:
Requirements Engineering, Goal Modeling, Digital Twin, Industry Automation, Robotic Systems.
Abstract:
In many smart manufacturing scenarios of Industry 4.0, robots play a vital role. Robotic systems allow for au-
tomatization and semi-automatization of individual work tasks using standard hardware. Thus, production and
assembly processes can be flexibly redefined during operation. In addition, human workers can be supported
for complex and specific work tasks where full automation by industrial production systems is not possible
or not cost-efficient. To monitor current process execution, to predict process outcome, and to ensure safe
behavior of the robots at runtime, digital twins are seen as a vital part of future smart manufacturing. How-
ever, current industrial approaches typically define the digital twin on the go, i.e. when the factory has been
build and equipped with robotic systems. Thus, the absence of systematic planning of the digital twin leads to
unused potential for more complex analysis, monitoring, and prediction tasks of digital twins commonly sug-
gested in research. This is partly due to the absence of structured software and systems engineering approaches
for the development of robotic systems. In this paper, we explore the use of goal modeling to systematically
define the robotic system, its monitoring system, and the digital twin. Application to case examples shows that
this lightweight approach aligns with industry preferences to focus on technical challenges rather than invest
too much effort in a thorough yet cost intensive engineering approach, while at the same time allowing for the
proper definition of robots and their digital twins.
1 INTRODUCTION
Robotic systems involve mechanisms that interact
with their surroundings, including humans, utilizing
an array of sensors, actuators, and interfaces to of-
fer intelligent services and information (Demir and
Turan, 2021). Robot systems must work to achieve
tasks while monitoring and reacting to unexpected sit-
uations (Kortenkamp et al., 2016). Digital twins are
virtual representations of physical systems (Koulamas
and Kalogeras, 2018). Within smart manufacturing,
incorporating robotic systems for production, digi-
tal twins are used to monitor and analyze the status
of their physical counterparts. Consequently, digital
twins aid in planning real-time adaptations by detect-
ing unexpected events or errors during process execu-
tion.
Among others, the huge potential of digital twins
is seen in supporting safety assurance at runtime, ex-
ploring problem spaces to find optimal or near opti-
a
https://orcid.org/0009-0008-7886-7081
b
https://orcid.org/0009-0005-6421-1450
c
https://orcid.org/0000-0002-9156-9731
mal solutions (Liu et al., 2020), foster prediction of
runtime properties (Tao et al., 2019), foster more sus-
tainable manufacturing (Xu et al., 2022), or improve
cybersecurity (B
´
ecue et al., 2022). Thus, the basic
idea is that the twin can be used to simulate the exe-
cution of a task in a safe environment, and, as a conse-
quence, the actual robot will only execute this task if
determined safe by the digital twin (Kor et al., 2023).
This also allows a better instrumentation for moni-
toring system execution and determining the current
state of the system (Tao et al., 2019).
1.1 Current Challenges in the Definition
of Digital Twins for Robotic Systems
The utilization of digital twins in the field of robotic
systems is relatively new and presents several chal-
lenges. Some of the most common ones include com-
patibility issues, high development costs, uncertainty
in development and real-time feedback, as well as low
accuracy and precision. This necessitates the acquisi-
tion of new sensory devices that are more compati-
ble, consequently leading to an increase in the overall
466
Jesus Raja, J., Manjunath, M. and Daun, M.
Towards a Goal-Oriented Approach for Engineering Digital Twins of Robotic Systems.
DOI: 10.5220/0012681500003687
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2024), pages 466-473
ISBN: 978-989-758-696-5; ISSN: 2184-4895
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

cost (Ramasubramanian et al., 2022). Notably, the
flexibility of human-robot collaborations expands the
range of conceivable states in the digital twin. Fur-
thermore, in cyber-physical systems, challenges re-
lated to connectivity, computational power, and var-
ious other factors significantly impact the creation of
a highly reliable digital twin (Ding et al., 2019).
Albeit the existence of these technical challenges,
there exists a need for structured development ap-
proaches, systematically designing the digital twins in
combination with their physical counterparts. There
particularly exist a need for approaches support-
ing early development phases (Sandkuhl and Stirna,
2020). A promising approach to overcome this lack of
systematic engineering approaches is seen in model-
based development, which is popular in the context of
industry 4.0 (Wortmann et al., 2020).
1.2 Contribution
Goal modeling is an established lightweight model-
ing approach for early development phases (Van Lam-
sweerde, 2001; Horkoff et al., 2019). In this pa-
per, we explore the use of goal modeling with the
goal oriented requirement language (GRL, (ITU Int.
Telecommunication Union, 2018)) for systematically
defining the robotic system, its monitoring system,
and the digital twin. Application to an industry ex-
ample shows that this lightweight approach aligns
with industry preferences to focus on technical chal-
lenges rather than invest too much effort in a thorough
yet cost intensive engineering approach, while at the
same time allowing for the proper definition of robots
and their digital twins. Additionally, the utilization of
runtime analysis through goal reasoning unveils more
benefits in understanding the system and its digital
twin.
1.3 Outline
The paper is outlined as follows. Section 2 gives
an overview of the related work. Section 3 presents
the goal-oriented engineering approach for develop-
ing robotic systems and their digital twins, being used
to explore the use of goal modeling in the engineering
of these systems. Based on this approach, Section 4
evaluates the applicability and usefulness of this ap-
proach using an industry case example from the in-
dustry automation domain. Finally, Section 5 con-
cludes the paper and discusses the next steps in future
work.
2 RELATED WORK
Goal modeling is an established approach in require-
ments engineering (Van Lamsweerde, 2001; Horkoff
et al., 2019). The concept of goal models has
been advocated to express stakeholder objectives and
to capture and choose among requirement alterna-
tives (Horkoff and Yu, 2016). Goal models have
proven useful for eliciting, documenting, and validat-
ing stakeholder intentions (Van Lamsweerde, 2001).
They are commonly used in early phase requirements
engineering to document the basic high-level require-
ments and to already reason over fundamental design
decisions and to identify crucial conflicts in the very
early stages of development (Grubb and Chechik,
2021).
The most common goal modeling approaches are
KAOS (Dardenne et al., 1993; Van Lamsweerde,
2009) and iStar (Yu, 1997; Dalpiaz et al., 2016).
The iStar (originally i*) framework defines a con-
ceptual modeling language for capturing and analyz-
ing properties of complex systems in terms of ac-
tors, their intentions, and their relationships (Amyot
et al., 2009). The Goal-oriented Requirement Lan-
guage (GRL) is a lightweight standardized version of
iStar, it is regulated by the International Telecommu-
nication Union (ITU) in its recommendation Z.151
(ITU Int. Telecommunication Union, 2018). The
GRL documents goals in graph-based structures. Ac-
tors are used to define the belonging of goals to dif-
ferent stakeholders or, as in the case of this paper, to
systems. In addition to goals, the GRL defines fur-
ther intentional elements that allow separating differ-
ent concepts like qualities and tasks. Intentional ele-
ments can be decomposed, and they can contribute to
each other, or even depend on each other.
Analyses (i.e. goal satisfaction analysis or rea-
soning) of goal models allow for early detection of
defects (Giorgini et al., 2003; Brings et al., 2019).
Thereby, the benefit of goal models is often seen in
early discovery and definition of relations (e.g., con-
tributions, dependencies, conflicts) between different
requirements (Kavakli, 2004), as goal reasoning can
also be used to allow complex analyzes in the early
development phases (Pardillo and Trujillo, 2008).
3 APPROACH
3.1 Overview and Process Steps
The major idea of the approach is to use a goal model
for runtime analysis, as has also been suggested by
(Cheng et al., 2014). It suggests that goals can pro-
Towards a Goal-Oriented Approach for Engineering Digital Twins of Robotic Systems
467

vide assurance at runtime as they adapt to changes in
their execution environment. Goal modeling enables
assurance techniques, and modification of the model
to adapt to the change of the application.
For the digital twin, we want to foster re-use of
design time models. As has been shown by Daun et
al. (Daun et al., 2019), GRL goal models are a good
approach to define requirements and analyze early de-
sign decisions for cyber-physical systems, particular
in the domain of industry automation. Therefore, we
aim at re-using design time models for the smart fac-
tory, especially for the runtime analysis. In particu-
lar, we build upon a iStar-compliant GRL extension
(Daun et al., 2021), which we have shown to be ap-
plicable to robotic production systems (Daun et al.,
2023). In previous work, we have shown that goal
models can be used to specify the digital twin (Je-
sus Raja et al., 2023), in this paper we focus on the
systematic development of the digital twin goal model
based on the goal model of the robotic system. Figure
1 shows the overall idea.
First, the smart factory and the individual cyber-
physical production and transport systems of the
smart factory are defined using a GRL goal model.
Based on the goal model, the digital twin is defined.
The production system is completely automated and
therefore only requires humans as a backup monitor-
ing system. Therefore, the initial goal model is ex-
tended with monitoring tasks reflecting the runtime
objectives of the digital twin itself. Finally, the digital
twin goal model is linked to the factory and, based on
monitoring data, the system is updated to reflect the
current status of the factory. We then use, goal rea-
soning techniques to identify problematic situations
and propose runtime adaptations.
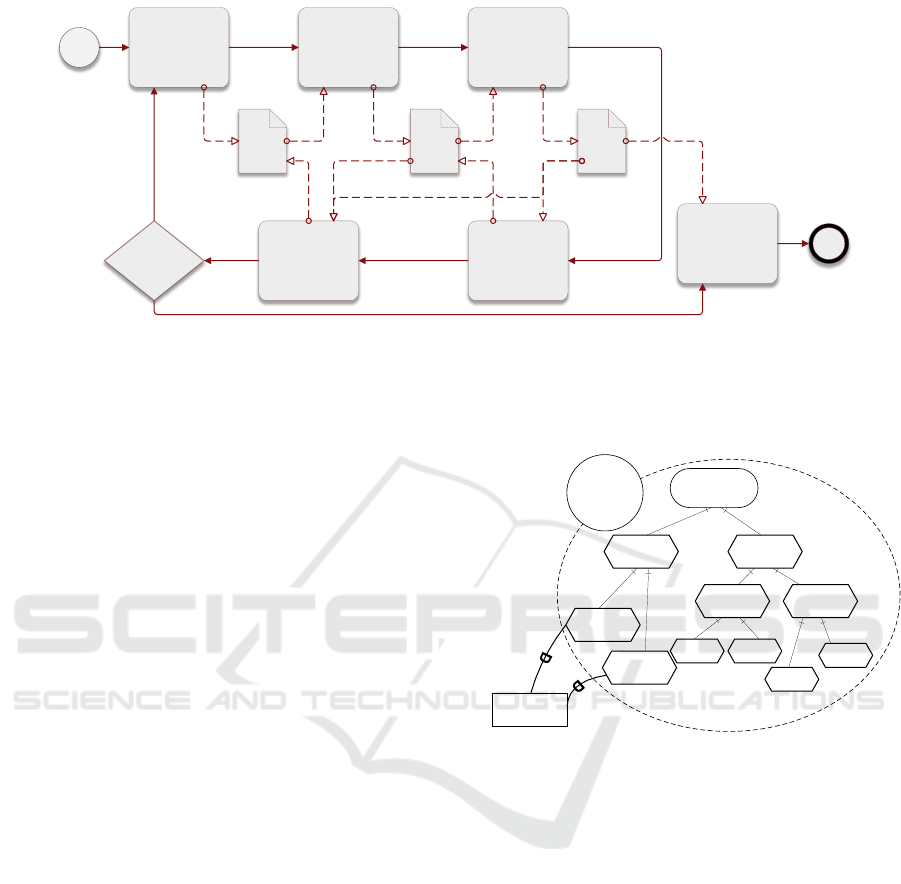
In summary – and as outlined in Figure 1, we
propose the goal-oriented specification of the physi-
cal and the digital twin with four consecutive process
steps.
• Step 1: Specify the Physical Twin (i.e. the Sys-
tem) in a Goal Model. First, a goal model is cre-
ated defining the physical twin. This goal model
focuses on the goals to be achieved by each robot
to be part of the overall robotic system. For these
goals, tasks are defined to specify the basic func-
tionality needed for each robot.
• Step 2: Specify the Monitoring System by Ex-
tending the System Goal Model. Robotic sys-
tems heavily rely on a wide range of monitor-
ing devices. These can be, for instance, cameras
needed to identify certain poses of work pieces
or the robot itself, or even safety shutdown mats
monitoring whether a human worker is in a cer-
tain area coming too close to the robot. In addi-
tion, monitoring devices need to be specified for
each task from Step 1. This allows representing
the current state of the robot (and its goal fulfill-
ment) in the digital twin.
• Step 3: Specify the digital twin and Combine
the Goal Models of the Different Systems and
their Monitoring Systems. In this step, the goal
model of the digital twin is defined. In addition, to
the simple monitoring tasks, the digital twin shall
typically provide some additional business value.
For instance, the digital twin shall predict whether
a potential safety hazard might occur in the direct
future (i.e. if a worker is likely to step into the
path of the robot), whether the current assembly
process might fail due to insufficient adherence to
the specified process execution, or the tool needs
replacement due to wearing. In addition, often
a robotic system – specifically in manufacturing
and assembly processes – consists of multiple in-
dividual robots. In this case, the digital twin needs
to aggregate the data collected from the different
monitoring systems and the different goal models
of each robot need to be combined.
• Step 4: Specify Goal Fulfillment Criteria for
Runtime Analysis. Finally, the goal model shall
be used as a runtime model to highlight the cur-
rent state of goal fulfillment for the robot and the
monitoring system (e.g., to detect system failures)
and to foster the prediction of the outcome of the
current production step. Therefore, goal fulfill-
ment criteria need to be defined for each task of
the system and the monitoring system.
Furthermore, Figure 1 shows some needed itera-
tions. In our case, we follow a bottom-up approach
as it best fits the thought process of current indus-
trial engineers (i.e. define first the robot you want to
build and later think about the digital twin). How-
ever, in this process, it is not ensured that all tasks
needed for functionality of the digital twin has al-
ready been defined. Therefore, the definition of the
digital twin model will often lead to the need to re-
vise the monitoring system model, or even the system
model. When defining the monitoring system in the
first place, emphasis is often given to a) the defini-
tion of monitoring devices needed for proper system
execution (e.g., pose recognition), b) the definition of
monitoring devices for safety concerns (e.g., detect
human workers in a certain area), or c) the imple-
mentation of quality assurance measures (e.g., check
that the work product has been assembled correctly).
Thus, when defining the desired functionality of the
digital twin, it will often be detected that more moni-
toring devices are needed to support predictions. This
can also be monitoring devices not directly attached
ENASE 2024 - 19th International Conference on Evaluation of Novel Approaches to Software Engineering
468
Step 1: Model
the robotic
system
Step 2: Model
the monitoring
system
Step 3: Model
the digital twin
Step 4: Define
goal fulfillment
criteria
System Model Monitoring Model Digital Twin Model
Refine the
Monitoring
System
Refine the
System
yes
Revisions
needed
Final?
Figure 1: Overview.
to the physical twin. For instance, it might be neces-
sary to monitor the production rate of a certain work
piece produced by another machine in the factory to
estimate whether the current assembly process might
be disturbed.
3.2 Modeling the System
We use our goal modeling extension for collaborative
cyber-physical systems to model the physical twin. In
addition, we restrict the way the goal model is cre-
ated to foster the later development of the digital twin.
Therefore, we need to ensure that the goal model can
be properly connected to the real world. This means
that the elements of the goal model must be moni-
tored. This allows updating goal fulfillment of the
model according to the current state of the system and
use reasoning techniques to analyze the system.
Important for linking the goal model to the real
world are tasks. As our primary focus lies in mon-
itoring our data, ’tasks’ serve as a means of moni-
toring as they articulate the system’s behavior. Tasks
represent abstract instructions executed by a system
to attain a goal (ITU Int. Telecommunication Union,
2018). For a more comprehensive understanding of
functionality, tasks can be further broken down into
finer-grained tasks. In production processes, task ful-
fillment is determined by monitoring the outcomes of
the tasks. This modeling approach is in-line with ex-
isting ideas to foster a more structured approach to
modeling GRL and iStar goal models (Keller et al.,
2018).
Figure 2 shows this goal modeling approach for
a collaborative robot (cobot) used in a manufacturing
production line for welding a car’s doors to its chas-
sis. The cobot shown is responsible for executing a
simple pick and place operation. This is an operation
commonly needed in robotic automation as the work
pieces needed, must be identified, selected, and posi-
tioned properly, so that subsequent robots (and partly
human workers) can use them.
Placeparts
together
AND
Movepart
Position
calculator
Checkposition
ofpart
Calibratecobot
position
Pickobject Placeobject
AND
AND
Cobot
Camera1
Camera2a
Double‐check
Position
MonitorCobot
Position
MonitorPick
andPlace
Ensuresuccessful
completionofPickingand
placingpart
Checkplacedpart
Monitoring
System
AND
Holdpart
Moveto
location
Droppart
inlocation
Moveback
toorigin
AND
AND
Camera2b
Placeparts
together
AND
Movepart
Position
calculator
Checkposition
ofpart
Calibratecobot
position
Pickobject Placeobject
AND
AND
Cobot
Camera1
Holdpart
Moveto
location
Droppart
inlocation
Moveback
toorigin
AND
AND
Figure 2: Goal model of the physical twin.
The goal model illustrates all the tasks the cobot
must execute to pick and place the parts necessary
for welding a car. The cobot initiates the process by
calculating and calibrating the positions of the parts
required for picking. These procedures depend on a
camera, which is considered an external resource in
our goal model as it does not belong to the cobot but
to the factory itself. Subsequently, the cobot proceeds
to move the picked parts to their designated positions.
The essential sub-tasks, ’pick object’ and ’place ob-
ject,’ play a pivotal role in accomplishing the over-
arching task of ’Move part.’ Both of these sub-tasks
have their own respective sub-tasks that need comple-
tion for the entire process to succeed. All tasks and
sub-tasks are interconnected through an ’AND’ con-
nection, signifying that the successful completion of
the process hinges on each individual task and sub-
task being completed without any errors.
Towards a Goal-Oriented Approach for Engineering Digital Twins of Robotic Systems
469

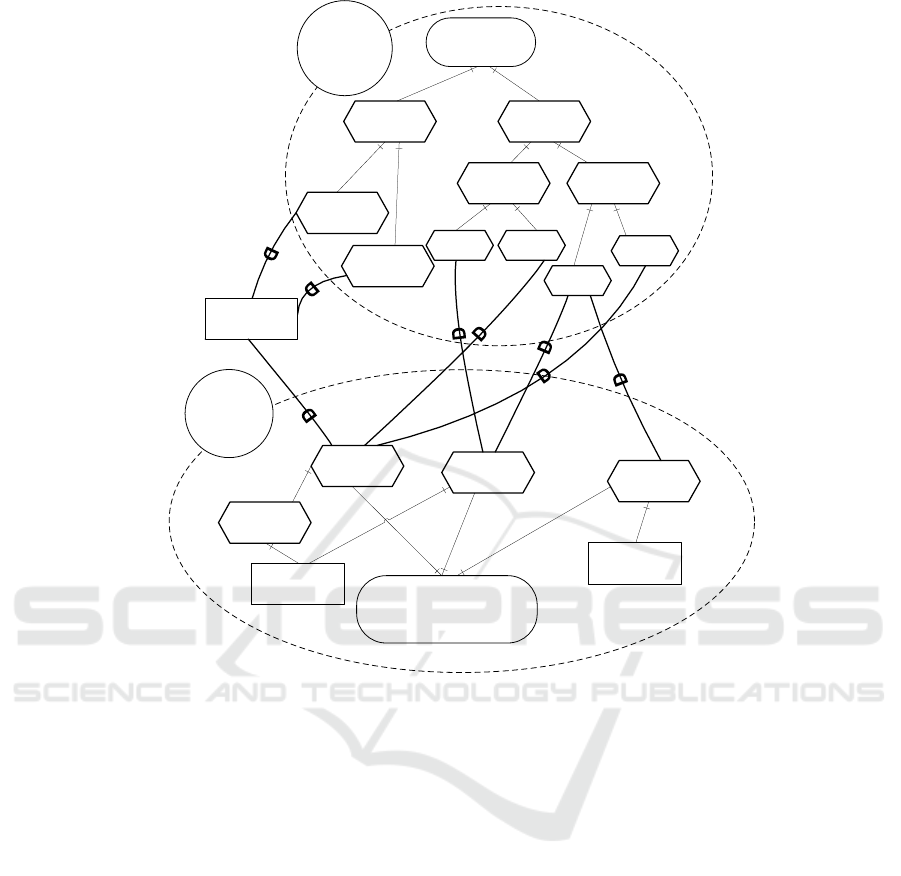
3.3 Modeling the Monitoring System
Subsequently, we define the goal model for the digi-
tal twin by extending the existing goal model of the
cobot (Figure 2) to incorporate essential elements of
the monitoring system that are later used by the dig-
ital twin. The resulting goal model for the monitor-
ing system is depicted in Figure 3. Notably, we have
introduced monitoring tasks dedicated to overseeing
system execution. These are represented as distinct
goals connected based on dependencies.
To ensure system monitoring during operation,
multiple sensors and cameras are strategically po-
sitioned. Various potential system malfunctions —
such as sensor errors, human errors, part misalign-
ment, interference from other equipment, or environ-
mental factors — are anticipated. These refined mon-
itoring tasks are intricately tied to the cobot’s process
tasks, enabling clear associations between monitor-
ing and the specific processes like pick and place in
our case. Additionally, we’re able to introduce sup-
plementary monitoring tasks unrelated to the primary
process tasks. For instance, one task involves evaluat-
ing the work product after completing its task of cal-
culating the product’s position, while another focuses
on precisely picking and placing the product. This lat-
ter task aims to verify whether the calibration aligns
with the digital twin’s predictions. Notably, a second
camera is utilized for this monitoring task, distinct
from the task that checks the part’s position. Here, the
objective isn’t solely to monitor task accuracy; rather,
it’s to confirm whether the calibration aligns with the
predicted results.
3.4 Modeling the Digital Twin
In the next step, the digital twin can be defined for
each robotic system or for the system-of-systems (i.e.
for all robotic systems together). Therefore, we again
use GRL goal modeling and integrate a new actor for
the digital twin into the goal model. Thereby, we can
differentiate between the physical system, the mon-
itoring of the system, and the analysis procedures of
the digital twin. The goals and tasks of the digital twin
are then connected to the monitoring tasks. Thereby,
it is ensured that all analysis procedures are suffi-
ciently grounded in the available data gathered by the
monitoring system during runtime. In this phase, it is
likely that data is identified that is needed for the dig-
ital twin but has not yet been monitored. Therefore,
the goal model of the monitoring system will need re-
vision and integrate these new monitoring tasks. An-
other likely effect is the introduction of the function-
ality in the system due to the outcome of predictions.
As the results of the calculation conducted by the dig-
ital twin shall impact the physical twin (e.g., to op-
timize process execution, to stop unsafe execution),
functionality is needed in the system that allows re-
acting to the outputs of the digital twin.
3.5 Goal Reasoning for Runtime
Analysis
Using goal modeling to model the system and the dig-
ital twin, might allow us to reason over the goal model
to identify goal fulfillment or the lack of goal fulfill-
ment during runtime. Therefore, we investigate dif-
ferent application scenarios for existing goal satisfac-
tion analysis approaches to support runtime analysis
and adaptation planning of the digital twin.
For the monitoring, forward reasoning (Amyot
et al., 2010) can be applied, thereby, we need to
ensure that all leaves of the goal graph are moni-
tored. As discussed above, the goals of the cobot
have been decomposed until reaching a level of fine-
grained tasks that can be monitored. Subsequently,
the monitoring data is used to estimate whether a task
is fulfilled or not. Based on these measurements, the
goal fulfillment is propagated up to the higher level
goals. Thus, can be determined if the cobot is cur-
rently performing its duties as intended or whether an
intervention is needed.
A basic distinction commonly made for reasoning
approaches is the differentiation between qualitative
reasoning and quantitative reasoning (Amyot et al.,
2010; Giorgini et al., 2003).
• Qualitative Reasoning. The starting goals (i.e.
the leaf goals in forward reasoning and the upper
goals in backward reasoning) are assigned goal
satisfaction labels like, e.g., ‘satisfied’, ‘weakly
satisfied’, ‘weakly denied’, ‘denied’. Then dif-
ferent propagation rules are applied to determine
how these are propagated. For instance, an AND-
decomposed ‘satisfied’ and ‘weakly satisfied’ will
be composed to ‘weakly satisfied’.
• Quantitative Reasoning. Instead of goal satisfac-
tion labels, numeric values are used and propa-
gated. While different scales are possible, a com-
mon approach is using values from ‘0’ to ‘100’,
being interpreted as percentage values. Based on
mathematical formulas used as propagation rules,
these values are then added, averaged, subtracted,
etc. to propagate goal fulfillment.
We found both approaches – qualitative and quan-
titative reasoning – applicable for runtime analysis.
Both approaches can be used to support runtime mon-
itoring of system execution. The propagation of goal
ENASE 2024 - 19th International Conference on Evaluation of Novel Approaches to Software Engineering
470
Placeparts
together
AND
Movepart
Position
calculator
Checkposition
ofpart
Calibratecobot
position
Pickobject Placeobject
AND
AND
Cobot
Camera1
Camera2a
Double‐check
Position
MonitorCobot
Position
MonitorPick
andPlace
Ensuresuccessful
completionofPickingand
placingpart
Checkplacedpart
Monitoring
System
AND
Holdpart
Moveto
location
Droppart
inlocation
Moveback
toorigin
AND
AND
Camera2b
Placeparts
together
AND
Movepart
Position
calculator
Checkposition
ofpart
Calibratecobot
position
Pickobject Placeobject
AND
AND
Cobot
Camera1
Holdpart
Moveto
location
Droppart
inlocation
Moveback
toorigin
AND
AND
Figure 3: Goal model of the monitoring system.
satisfactions helps in identifying which parts of the
system function correctly or need support at run-
time. Defining thresholds for the quantitative ap-
proach poses a challenge. We need to be able to deter-
mine when we consider the system working correctly.
Due to sensor imprecision, blocked views of cameras,
etc. it is highly unlikely to reach 100% goal satis-
faction. Therefore, we need to define a threshold like,
with a goal satisfaction probability of 95% we assume
this goal to be fulfilled.
Determining goal satisfaction of the leaf tasks
pose an even more challenging situation. The ques-
tion of when do we consider a task to be satisfied
or not, is difficult to answer. Problematic is the use
of ‘weakly satisfied’ or ‘weakly denied’, which we
therefore discourage. The same obviously holds true
for quantitative reasoning. It is a challenge to deter-
mine, when can we reach 97% goal satisfaction for
the welding task or 76% goal satisfaction for a moni-
toring task. Despite this difficulty in application, this
needs to be done either way. Even traditional moni-
toring approaches work with probabilities and thresh-
olds. Thus, we see the great benefit of a goal-oriented
approach in having this discussion early during sys-
tem design. Right at the moment of the development
of the digital twin, we need to determine how we can
instantiate concrete determination of goal satisfaction
for the various values we measure.
4 EVALUATION
We evaluated the use of GRL goal models to de-
velop robotic systems and their digital twins using a
case study from the industry automation domain. We
chose an industrial production and assembly line for
this. Overall, we can state that the use of GRL goal
models is a fitting approach to model robotic systems
and support the definition of the digital twin. Partic-
ularly, they offer support for identifying the tasks to
be monitored and defining the means to do so. For
instance, in our case, each monitoring system uses an
independent camera to allow detecting camera mis-
calibrations of the primary camera used by the respec-
Towards a Goal-Oriented Approach for Engineering Digital Twins of Robotic Systems
471

tive cobot. In a next step, analysis of the model and
identifying overlaps between the different monitoring
systems can result in finding further quality checking
approaches by comparing the overlapping monitoring
output of the individual monitoring systems.
We found the following major benefits for using
GRL goal models in the development of digital twins
in industry automation:
• Re-use. Requirements goal models can be re-used
twice. First for defining the digital twin. Second,
for runtime monitoring and analysis. Therefore,
the goal models can easily be extended by mon-
itoring tasks responsible for monitoring the pro-
duction tasks of the individual cobots. Thus, it
also allows for a more continuous development of
a system, as changes in the factory outlet are in-
corporated into the goal model and thus directly
reflected in the requirements.
• Analysis. Forward and backward reasoning ap-
proaches for goal models can be easily applied
to support monitoring of the factory state (i.e., by
up-propagating runtime goal fulfillment) and cal-
culating interventions (i.e., by down-propagating
goal fulfillment to determine necessary actions).
• Simplicity for human-in-the-loop use cases.
Smart factories are commonly monitored and run
by a factory manager. This human has the task
to ensure safe functioning of the factory and is
involved in re-scheduling and optimization tasks.
Therefore, a simple graphical model highlighting
dependencies between different tasks is benefi-
cial.
Finally, we need to briefly line out the major lim-
itations. As common for case study research, we
have only gathered insights for one case example,
thus, generalizability cannot be assumed. Further-
more, comparative experimental research is needed to
determine whether using goal satisfaction analysis at
runtime can actually contribute to digital twins in in-
dustrial production systems. Additionally, investigat-
ing the potential of using goal satisfaction analysis at
runtime needs more thorough consideration in the fu-
ture, particularly considering the definition of thresh-
olds and providing support for systematically defining
goal satisfaction labels or percentages based on mon-
itoring data.
5 CONCLUSION
In this paper, we investigated the use of GRL goal
models to develop robotic systems and their digital
twins. GRL goal models support easy specification of
high-level requirements and their interrelations. The
digital twin allows for in-depth real time analysis of
the current state of the factory and supports action
planning for new tasks or evaluating error handling
strategies for defects occurring at runtime. For the fu-
ture of manufacturing, digital twins play a vital role.
We have shown that GRL goal models are appli-
cable to model not only the cyber-physical production
systems within a factory, but also the needed mon-
itoring systems belonging to the digital twin. This
way, the digital twin can be developed closely linked
to the individual goals of the systems to be devel-
oped. In consequence, it can be ensured that every
major production step – which is defined as task con-
tributing to a major goal of a production system – is
monitorable and will be monitored by the digital twin.
The use of goal models furthermore supports the def-
inition of thresholds and decision-making about how
to define that a process step is actually executed cor-
rectly, and the corresponding task can be considered
fulfilled. Based on these definitions, goal satisfaction
analyses can be applied to estimate the overall goal
fulfillment of the factory and to calculate adaptation
scenarios to reach goal fulfillment. In addition, we
identified some modeling patterns for digital twins for
industrial manufacturing.
Future work, will have to validate these modeling
patterns in other scenarios. Furthermore, a structured
approach to estimate goal fulfillment based on moni-
toring data will help goal-based development of digi-
tal twins.
REFERENCES
Amyot, D., Ghanavati, S., Horkoff, J., Mussbacher, G., Pey-
ton, L., and Yu, E. (2010). Evaluating goal models
within the goal-oriented requirement language. Int.
Journal of Intelligent Systems, 25(8):841–877.
Amyot, D., Horkoff, J., Gross, D., and Mussbacher, G.
(2009). A lightweight grl profile for i* modeling.
In Advances in Conceptual Modeling-Challenging
Perspectives: ER 2009 Workshops, pages 254–264.
Springer.
B
´
ecue, A., Praddaude, M., Maia, E., Hogrel, N., Prac¸a, I.,
and Yaich, R. (2022). Digital twins for enhanced re-
silience: Aerospace manufacturing scenario. In Int.
Conf. on Advanced Information Systems Engineering,
pages 107–118. Springer.
Brings, J., Daun, M., Bandyszak, T., Stricker, V., Weyer,
T., Mirzaei, E., Neumann, M., and Zernickel, J. S.
(2019). Model-based documentation of dynamicity
constraints for collaborative cyber-physical system ar-
chitectures: Findings from an industrial case study.
Journal of systems architecture, 97:153–167.
Cheng, B. H., Eder, K. I., Gogolla, M., Grunske, L., Litoiu,
ENASE 2024 - 19th International Conference on Evaluation of Novel Approaches to Software Engineering
472

M., M
¨
uller, H. A., Pelliccione, P., Perini, A., Qureshi,
N. A., Rumpe, B., et al. (2014). Using models at run-
time to address assurance for self-adaptive systems.
Models@ run. time: foundations, applications, and
roadmaps, pages 101–136.
Dalpiaz, F., Franch, X., and Horkoff, J. (2016). istar 2.0
language guide. arXiv preprint arXiv:1605.07767.
Dardenne, A., Van Lamsweerde, A., and Fickas, S. (1993).
Goal-directed requirements acquisition. Science of
computer programming, 20(1-2):3–50.
Daun, M., Brings, J., Krajinski, L., Stenkova, V., and
Bandyszak, T. (2021). A grl-compliant istar exten-
sion for collaborative cyber-physical systems. Re-
quirements Engineering, 26(3):325–370.
Daun, M., Manjunath, M., and Jesus Raja, J. (2023). Safety
analysis of human robot collaborations with grl goal
models. In ER 2023: Int. Conf. on Conceptual Mod-
eling, pages 317–333. Springer.
Daun, M., Stenkova, V., Krajinski, L., Brings, J.,
Bandyszak, T., and Weyer, T. (2019). Goal model-
ing for collaborative groups of cyber-physical systems
with grl: reflections on applicability and limitations
based on two studies conducted in industry. In 34th
ACM/SIGAPP Symp. on Applied Computing, pages
1600–1609.
Demir, K. A. and Turan, B. (2021). Developing trends
in power and networking technologies for intelligent
cities. In Developing and monitoring smart environ-
ments for intelligent cities, pages 61–85. IGI Global.
Ding, K., Chan, F. T., Zhang, X., Zhou, G., and Zhang, F.
(2019). Defining a digital twin-based cyber-physical
production system for autonomous manufacturing in
smart shop floors. Int. Journal of Production Re-
search, 57(20):6315–6334.
Giorgini, P., Mylopoulos, J., Nicchiarelli, E., and Sebas-
tiani, R. (2003). Reasoning with goal models. In ER
2002: 21st Int. Conf. on Conceptual Modeling, pages
167–181. Springer.
Grubb, A. M. and Chechik, M. (2021). Formal reasoning
for analyzing goal models that evolve over time. Re-
quirements Engineering, 26(3):423–457.
Horkoff, J., Aydemir, F. B., Cardoso, E., Li, T., Mat
´
e, A.,
Paja, E., Salnitri, M., Piras, L., Mylopoulos, J., and
Giorgini, P. (2019). Goal-oriented requirements engi-
neering: an extended systematic mapping study. Re-
quirements engineering, 24:133–160.
Horkoff, J. and Yu, E. (2016). Interactive goal model analy-
sis for early requirements engineering. Requirements
Engineering, 21:29–61.
ITU Int. Telecommunication Union (2018). Recommenda-
tion itu-t z.151: User Requirements Notation (URN).
Technical report.
Jesus Raja, J., Manjunath, M., Kranz, P., Schirmer, F., and
Daun, M. (2023). Using goal modeling for defining
digital twins in industry automation. In Companion
Proceedings 42nd Int. Conf. Conceptual Modeling.
Kavakli, E. (2004). Modeling organizational goals: Anal-
ysis of current methods. In ACM Symp. on Applied
computing, pages 1339–1343.
Keller, K., Brings, J., Daun, M., and Weyer, T. (2018). A
comparative analysis of itu-msc-based requirements
specification approaches used in the automotive indus-
try. In 10th Int. Conf. System Analysis and Modeling,
pages 183–201. Springer.
Kor, M., Yitmen, I., and Alizadehsalehi, S. (2023). An in-
vestigation for integration of deep learning and digital
twins towards construction 4.0. Smart and Sustainable
Built Environment, 12(3):461–487.
Kortenkamp, D., Simmons, R., and Brugali, D. (2016).
Robotic systems architectures and programming.
Springer handbook of robotics, pages 283–306.
Koulamas, C. and Kalogeras, A. (2018). Cyber-physical
systems and digital twins in the industrial inter-
net of things [cyber-physical systems]. Computer,
51(11):95–98.
Liu, C., Jiang, P., and Jiang, W. (2020). Web-based
digital twin modeling and remote control of cyber-
physical production systems. Robotics and computer-
integrated manufacturing, 64:101956.
Pardillo, J. and Trujillo, J. (2008). Integrated model-driven
development of goal-oriented data warehouses and
data marts. In ER 2008: 27th Int. Conf. on Conceptual
Modeling, pages 426–439. Springer.
Ramasubramanian, A. K., Mathew, R., Kelly, M., Har-
gaden, V., and Papakostas, N. (2022). Digital twin for
human–robot collaboration in manufacturing: Review
and outlook. Applied Sciences, 12(10):4811.
Sandkuhl, K. and Stirna, J. (2020). Supporting early phases
of digital twin development with enterprise model-
ing and capability management: Requirements from
two industrial cases. In Enterprise, Business-Process
and Information Systems Modeling: 21st Int. Conf.
BPMDS, 25th Int. Conf. EMMSAD, pages 284–299.
Springer.
Tao, F., Qi, Q., Wang, L., and Nee, A. (2019). Digital twins
and cyber–physical systems toward smart manufactur-
ing and industry 4.0: Correlation and comparison. En-
gineering, 5(4):653–661.
Van Lamsweerde, A. (2001). Goal-oriented requirements
engineering: A guided tour. In Fifth ieee Int. Symp.
on requirements engineering, pages 249–262. IEEE.
Van Lamsweerde, A. (2009). Requirements engineering:
From system goals to UML models to software, vol-
ume 10. Chichester, UK: John Wiley & Sons.
Wortmann, A., Barais, O., Combemale, B., and Wimmer,
M. (2020). Modeling languages in industry 4.0: an ex-
tended systematic mapping study. Software and Sys-
tems Modeling, 19:67–94.
Xu, L., de Vrieze, P., Lu, X., and Wang, W. (2022). Digital
twins approach for sustainable industry. In Int. Conf.
on Advanced Information Systems Engineering, pages
126–134. Springer.
Yu, E. S. (1997). Towards modelling and reasoning sup-
port for early-phase requirements engineering. In
ISRE’97: 3rd IEEE Int. Symp. on Requirements En-
gineering, pages 226–235. IEEE.
Towards a Goal-Oriented Approach for Engineering Digital Twins of Robotic Systems
473
