
Enhancing Echo Processing Through the Integration of Support Vector
Machine and Weber’s Law Descriptors
Mehdia Hedir
1 a
, Fethi Demim
2 b
, Ali Zakaria Messaoui
3 c
, Aimen Abdelhak Messaoui
3 d
,
Hadjira Belaidi
4 e
, Abdenebi Rouigueb
5 f
and Abdelkrim Nemra
2 g
1
Faculty of Technology of M’Hamed BOUGARA University-Boumerdes (UMBB), Algeria
2
Laboratory of Guidance and Navigation, Ecole Militaire Polytechnique, Bordj El Bahri, Algiers, Algeria
3
Laboratory of Complex Systems Control and Simulators, Ecole Militaire Polytechnique, Bordj El Bahri, Algiers, Algeria
4
Signals and Systems Laboratory, Institute of Electrical and Electronic Engineering, University M’Hamed Bougara of
Boumerdes, Algeria
5
Laboratory of Artificial Intelligence and Virtual Reality, Ecole Militaire Polytechnique, Bordj El Bahri, Algiers, Algeria
Keywords:
Cloud, Tracking, Ground Echoes, SVM, WLD, WLBP.
Abstract:
Removing ground echoes from weather radar images is a topic of great importance due to their significant
impact on the accuracy of processed data. To address this challenge, we aim to develop methods that effectively
eliminate ground echoes while preserving the precipitation, which is a crucial meteorological parameter. To
accomplish this, we propose to test Local Descriptors based on Weber’s law (WLD), as well as descriptors that
combine Weber’s law with Local Binary Pattern (WLBP), using Support Vector Machine (SVM) classifiers to
automate the recognition of both types of echoes. The proposed methods are rigorously tested at the sites of
Setif and Bordeaux to evaluate their effectiveness in accurately identifying the ground echoes and precipitation.
The results of our experiments demonstrate that the proposed techniques are highly effective in eliminating
ground echoes while preserving the precipitation, and can be considered satisfactory for practical applications
in meteorological data processing.
1 INTRODUCTION
The scientific community is compelled to proactively
address the complexities of the atmosphere and its
intricate energy exchanges. Weather radar, a pivotal
tool for national weather services, airports, and mete-
orological research departments, is employed to mon-
itor precipitation, necessitating the implementation of
various filtering methods to eliminate false echoes.
Numerous studies have concentrated on refining radar
data filtering techniques within this domain.
In a seminal work, the authors of (Paixao et al.,
2015) devised a method specifically tailored for iden-
a
https://orcid.org/0000-0002-9089-8007
b
https://orcid.org/0000-0003-0687-0800
c
https://orcid.org/0000-0001-5753-5776
d
https://orcid.org/0000-0003-0687-0800
e
https://orcid.org/0000-0003-2424-626X
f
https://orcid.org/0000-0001-6530-2160
g
https://orcid.org/0000-0001-9237-9449
tifying areas of severe precipitation. Big data tech-
niques and technologies were proposed in (Fathi et al.,
2022) to effectively manage and analyze vast amounts
of meteorological data. Beyond its conventional ap-
plications, weather information has found relevance
in medical studies, exemplified by research on virus
spread, such as COVID-19 (Malki et al., 2020). Nev-
ertheless, meteorological data faces contamination
challenges from unwanted echoes, including Anoma-
lous Propagation (APs) and ground echoes (Kaissas-
sou et al., 2015). AP occurrences, associated with
temperature inversions and high humidity gradients,
were modeled using Markov chains in ((Haddad et al.,
2000)). Textural features were effectively employed
in (Haddad et al., 2004) to mitigate APs and soil
echoes, while fuzzy logic strategies were explored in
(Cho et al., 2006), (Islam et al., 2012).
In preceding research, a combination of textu-
ral characteristics derived from co-occurrence matri-
ces, Support Vector Machines (SVM), and Convolu-
tional Neural Networks (CNN) were leveraged to dis-
Hedir, M., Demim, F., Messaoui, A., Messaoui, A., Belaidi, H., Rouigueb, A. and Nemra, A.
Enhancing Echo Processing Through the Integration of Support Vector Machine and Weber’s Law Descriptors.
DOI: 10.5220/0012682700003758
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2024), pages 19-26
ISBN: 978-989-758-708-5; ISSN: 2184-2841
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
19
tinguish precipitation echoes from background noise
(Hedir and Haddad, 2016). Additionally, local bi-
nary models and their variations were investigated
for eliminating unwanted echoes (Hedir et al., 2018),
(Hedir et al., 2019).
In this study, we extend the descriptor repertoire
for echo characterization to incorporate Weber’s Law
Descriptor (WLD) (Chen et al., 2010) and Weber’s
Local Binary Model (WLBM) (Liu et al., 2013),
(Cortes and Vapnik, 1995). These features serve as
inputs to develop a robust SVM classifier (Cervantes
et al., 2020), (Rouigueb et al., 2022), (Rouigueb et al.,
2023), capable of discerning various types of echoes.
The organization of this work unfolds as follows:
Section II details the descriptors utilized in this study,
while Section III focuses on the Support Vector Ma-
chine classifier. Section IV provides insights into the
databases used for validating the proposed approach
and presents the obtained results. Lastly, Section V
offers concluding remarks and outlines potential fu-
ture directions.
2 LOCAL DESCRIPTORS
2.1 Local Binary Pattern
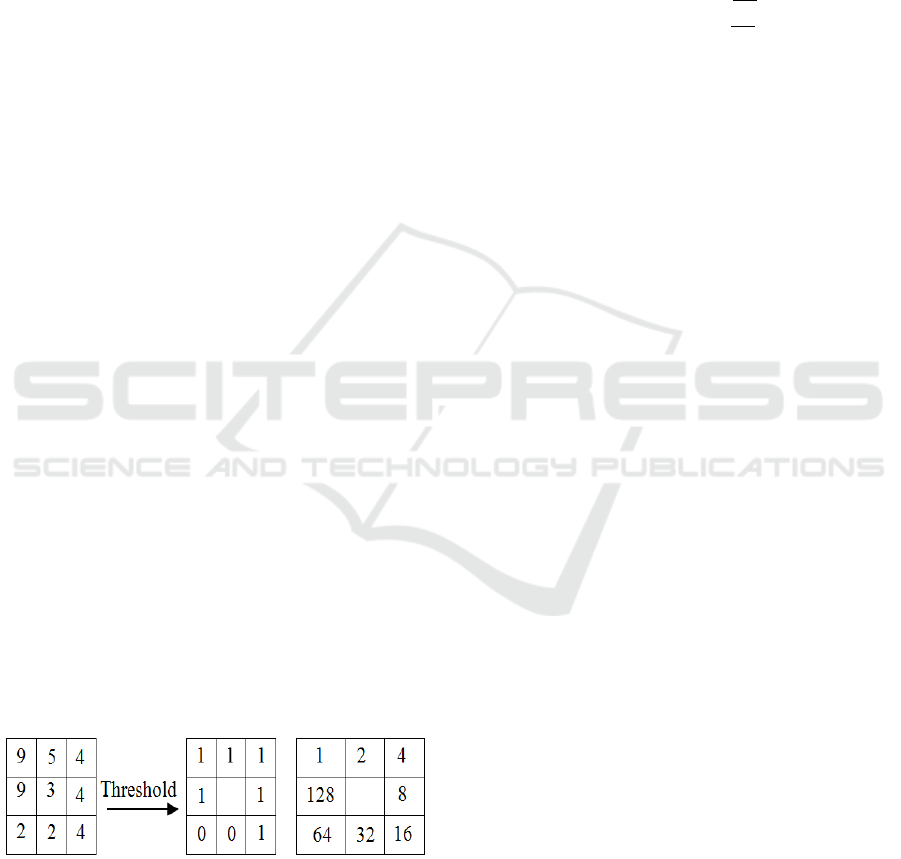
A proposed descriptor to characterize a local region is
part of the Local Binary Pattern (LBP) approach de-
scribed in (Ojala et al., 2002). LBP works by comput-
ing a binary code for each 3 × 3 neighborhood by di-
viding the values of the central pixel value (g
c
) by the
eight neighbors (g
p
), where the value 1 is assigned for
a positive outcome and the value 0 for a negative re-
sult (see Eq. (1). This standard basis of LBP produces
256 texture patterns. A result is a binary number that
represents the LBP code. The calculation of the afore-
mentioned code is illustrated in Figure 1. This figure
not only demonstrates the computational process but
also provides visual clarity to the methodology dis-
cussed.
Figure 1: Calculation of the LBP code.
LBP
P,R
=
P−1
∑
i=0
(g
i
−g
c
)2
i
= 159 with
1, x ≥ 0
0, x < 0
(1)
where g
c
is the central pixel and gi are the neighbors.
The 3 × 3 neighborhood size of LBP prevents it from
tracking large constructions. The operators are ex-
panded to encompass neighborhoods of various sizes
to address this issue. The LBP calculation can be ap-
plied to a symmetric circular neighborhood with ra-
dius R and P expressing the number of evenly spaced
samples. The following equations can be used to de-
termine the coordinates of g
p
.
g
x
= x
c
+ cos(
2πp
P
)
g
y
= y
c
− sin(
2πp
P
)
(2)
In image processing, interpolation is used to es-
tablish the gray level of a neighbor’s coordinates that
are not always found in the center of a pixel. The
multiscale Local Binary Pattern (LBP) was developed
based on this concept, and to enhance its characteri-
zation, two more ideas are included: uniformity and
non-uniformity. The uniform binary pattern incor-
porates a maximum of two transitions from 1 to 0
and vice versa, while non-uniform patterns have more
than two transitions. The LBP
u2
P,R
operator is calcu-
lated using these concepts. This information is found
in (Ojala et al., 2002).
LBP
u2
P,R
(x,y) =
I(LBP
u2
P,R
(x,y))i fU(LBP
P,R
)
≤ 2, I(Z) ∈ [0, (P − 1)P + 1]
(P − 1)P + 2 Otherwise
(3)
The circular symmetry of the neighborhood facil-
itates the definition of a secondary pattern, LBP
ri
P,R
,
which remains invariant not only to monotonic trans-
formations of the gray level scale but also to rota-
tions of the image. This second pattern, known as
the rotation-invariant LBP, is derived as follows:
LBP
ri
P,R
= min{ROR(LBP
P,R
(x,y),i / i ∈ [0,P − 1])}
(4)
We conduct a thorough investigation by testing
different combinations of radius and the number of
neighbors to determine the optimal parameter values
for the Local Descriptors and the Local Binary Pat-
tern descriptors used in our proposed methods. The
value ROR(a, i) corresponds to the result of i succes-
sive circular shifts to the right of the bits of number a
(coded on P bits).
2.2 Weber Law Descriptor
The relationship between a mental sensation and the
physical size of a stimulus is described by Weber’s
law. The principle was initially observed by the Ger-
man physiologist E.H. Weber and finds application
across different stimuli, including the correlation be-
tween the perceived intensity of a sound and the asso-
ciated pressure wave. The modern technique involves
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
20

two components, the excitation difference and the ori-
entation gradient, and is considered a robust descrip-
tor. Weber’s law is expressed as ∆I/I = K, where ∆I
is the threshold increment and I is the initial stimulus
intensity. Reference (Chen et al., 2010) is cited as the
source of Weber’s law.
Differential Excitation
This component is noted by ξ(xc) with x
c
the current
pixel, its intensity must be different from zero. It is
modeled by the arc tangent of the sum of the differ-
ences of intensities between the current pixel and its
neighbors divided by the intensity of the current pixel
as it is represented by Eq. (5):
ξ(x
c
) = arctan
∑
P−1
i=0
(x
i
− x
c
)
x
c
(5)
with x
i
represents the i
th
neighboring pixel of the cur-
rent pixel, and the value of ξ(x
c
) lies within the range
of [−
π
2
,
π
2
]. When ξ(x
c
) is positive, it indicates that
the neighborhood is darker than the current pixel.
Orientation
The ratio between the change in the horizontal direc-
tion and the vertical direction of an image is used to
calculate the orientation gradient. Figure 3 offers a
summary of the calculation’s specifics. These mathe-
matical equations can be used to represent this calcu-
lation as can be seen in Eq. (6), where v
10
= x
5
− x
1
,
v
11
= x
7
−x
3
and x
1
,x
3
,x
5
and x
7
are the neighbors of
pixel x
c
on 3 × 3 neighborhood as shown in Fig. 2.
θ = arctan(
v
10
v
11
) (6)
Figure 2: Demonstration of 3 × 3 neighborhood.
Weber Local Binary Pattern Descriptor
Since LBP can extract more information than the ori-
entation gradient, it was chosen as a part of the We-
ber descriptor. The Local Binary Pattern Descriptor
(LBP) is a robust descriptor that has been used in
many applications. The LBP vector is computed by
Figure 3: Example of gradient calculation based on excita-
tion for an image (Chen et al., 2010).
taking into account the eight adjacent pixels, mak-
ing it a discriminating descriptor. However, the ori-
entation gradient, which only considers four pixels,
preserves more information about the local structure.
The uniform LBP is preferred due to the prevalence
of uniform patterns, as shown in previous experi-
ments. The formula for calculating WLBP for an im-
age f (x,y) at position (x, y) is also provided.
g(x,y) = h(x,y) ⊗ f (x,y) (7)
h(x,y) = exp
−
x
2
+ y
2
2σ
2
(8)
where h(x, y) is the 2D Gaussian function and g(x,y)
is the convolution product of h(x,y) and f (x,y). Sub-
sequently, the estimation of ∆I is done by equation:
∆I = ∇
2
[h(x,y) ⊗ f (x,y)] =
1
πσ
4
x
2
+ y
2
2σ
2
− 1
exp
−
1
2σ
2
(x
2
+ y
2
)
(9)
In the case of the differential excitation, it is pre-
sented by ξ(x
c
) = arctan(∆I/I), where I refers to the
current pixel x
c
’s gray level intensity. Theoretically,
WLBP ought to be more discriminating than LBP;
however, this is really due to the interaction between
LBP and the excitation difference, which contributes
significantly to the information. The WLBP is more
illuminating and strong while yet maintaining the dis-
crimination.
Enhancing Echo Processing Through the Integration of Support Vector Machine and Weber’s Law Descriptors
21

3 SUPPORT VECTOR MACHINE
The Support Vector Machine (SVM) concept’s cen-
tral principle is the learning-based classification or
recognition of data. The latter generates an output
y = f (x) from a set of inputs x
i
. The goal is to de-
termine a function f from the observation of numer-
ous input/output pairs (also known as training data),
where x
i
represents any item and y
i
represents a class
label. This function, which corresponds to model
(Cervantes et al., 2020), effectively categorizes each
input/output pair into its respective class with preci-
sion. The task is to find a decision boundary that sep-
arates the space into two regions. Finding a decision
boundary that divides the space into two sections is
the problem at hand. The data is typically not linearly
separable, so a kernel function is utilized to increase
the distance between them. The data is represented in
a different place called feature space. The SVM train-
ing tool utilizes the LIBSVM library. Each sample
was split into two major groups (training and testing).
We employ the Radial Basis Function (RBF) kernel
for processing, which is presented as follows:
k(x
i
,x
j
) = exp(−γ∥x
i
− x
j
∥
2
), γ > 0 (10)
γ acts as a parameter that determines the hyperplane
during model training, with x
i
representing a sample
of input data and x
j
denoting all other samples. Con-
sequently, the decision function can be formulated as:
f (x) =
S
∑
i=1
α
i
y
i
k(x, x
i
) + b (11)
α
i
denotes the Lagrange multipliers with values rang-
ing between 0 and C, where b stands for the bias, and
C represents a positive constant that regulates errors
and maximizes the margin.
4 DATABASE AND
METHODOLOGY BASED
APPROACH
The 5799 photos acquired in Setif in 1999 and the
10.052 photographs taken in Bordeaux in 1996 make
up the database used for this study. Two incoher-
ent pulsed radars captured the 512 × 512 pixel im-
ages with a resolution of 1 km per pixel, which were
then displayed using the Plan Position Indicator Mode
(PPIM). Bordeaux has a gray level coding of 64 and
Setif has a gray level of 16. The first radar is situ-
ated close to Setif at the summit of Meghres Moun-
tain. The geography of the province of Setif is di-
vided into several regions: in the north, the Babors
Chain rises to a height of 2004 m. The Djurdjura and
Bibans Mountains, with peak elevations of 2300 m
and 1417 m, are located in the southwest. The altitude
at the region’s center ranges from 800 to 1300 m. Ev-
ery 15 minute, photos of Setif were captured as shown
in Fig. 4(a). The Bordeaux radar, which is situated
at Bordeaux M
˜
A©rignac Airport, is a member of the
Meteo-France-run operational French weather radar
network. The Pyrenees Mountains, which rise to a
height of 3000 m in the south and are located 200 km
from the radar, as well as the industrial sector that
surrounds the radar, are only two of the challenges in
the Bordeaux region. The main reason for permanent
echoes in this area is the industrial area. Every day,
five minutes were spent gathering these photographs.
Fig. 4(b) displays an illustration from the Bordeaux
website. Initially, a database comprising two sets of
images is compiled. One set exclusively portrays pre-
cipitation echoes, selected from images where distin-
guishing between ground echoes and precipitation is
straightforward. The other set comprises images cap-
tured during clear weather conditions, devoid of pre-
cipitation, depicting solely ground echoes. In the clas-
sification process, training data for precipitation is as-
signed the label (−1), while training data for ground
echoes is labeled (1).
The model design involves two key processes:
learning and validation. The training data is parti-
tioned into two segments, one for model training and
the other for validating the optimal model. Subse-
quently, a separate set of labeled test data, previously
unseen during the learning phase, is employed to eval-
uate the classifier’s robustness. The allocation of pix-
els for training and testing at both Setif and Bordeaux
sites is detailed in Table 1.
The SVM will be trained using the characteristic
vectors to identify the ideal parameters (γ,η). One of
these vectors is used to learn and create SVM mod-
els, and the other is utilized to validate just one model
out of the designed ones. With the introduction of
the nonlinear kernel, nonlinear data is taken into ac-
count. The selection of a suitable kernel function
and the modifying of its parameters form the foun-
dation of nonlinear SVM design. We use the Ra-
dial Basis Function kernel in our strategy. This fi-
nal example displays positive test findings. We can
assess the effectiveness of the suggested strategy us-
ing the statistics in Table 2, where a and d represent
the correct identification of precipitations and ground
echoes, while b and c represent the false identification
in order.
For better visualization of the WLD vector param-
eters, we propose to design a new descriptor which
combines WLD’s component and LBP
U2
8,1
.The LBP
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
22

(a) Image from Setif site. (b) Image from Bordeaux site.
Figure 4: Example of images from Setif and Bordeaux sites.
Table 1: Number of pixels used in training and testing for both databases.
Sites Training data Test data
Precipitations Ground echoes Precipitations Ground echoes
Setif 6500 6500 88015 72590
Bordeaux 6500 6500 1378267 956738
consider the nine neighbors, the threshold lets the
LBP be more sensitive to small gray level variation.
This leads the descriptor to extract a maximum of lo-
cal structure and it is very discriminating. However,
WLD can perfectly extract the edges even in the pres-
ence of intense noise, this encourages us to use the
WLD-LBP combination. We observed during exper-
iments on the database that the uniform binary mo-
tif gives a percentage equal to 86% for images con-
taining precipitations and 80% for those with ground
echoes using R = 1 and P = 8, while for R = 2 and
P = 16, the percentage is 67% for precipitation and
60% for ground echoes. We can note that the major-
ity of the binary patterns are uniform, that’s why we
favored the LBP
U2
8,1
.
4.1 Setif’s Results
We consider two situations for the Setif site : the
first concerns the case where we distinguish ground
echoes from precipitations; the second describes the
situation where the precipitation is covered by clut-
ter. The results obtained in the first case are sum-
marized in Table 3. The use of LBP
ri
, LBP
u2
and
LBP
riu2
shows an average efficiency in the treat-
ment of echoes. Indeed, more than 79.6% of echoes
are eliminated while the preservation of precipitation
does not exceed 64%. Considering PODE for WLD,
WLP and WLD-LBP, we notice that the second and
third cases exhibit a good suppression of undesirable
echoes with more than 92%, while WLD suppressed
only 84.69%. However, the percentage of correct
identification reaches its best score 90.13% with the
WLD-LBP descriptor as well as the SR which defines
the positive identification of ground echoes among
all the identifications with a rate equal to 94.93%.
This shows that the information added in the modi-
fied WLD-LBP descriptor provided additional infor-
mation for the identification of echoes. Fig. 5 shows
the obtained results when we filter an image of Fig.
5(a) with LBP
u2
and Fig. 5(b) with D − LBP. The
second case is when the precipitations are coved by
ground echoes, the estimations of statistical parame-
ters are difficult so only visual appreciation is possi-
ble. Fig. 6 and Fig. 7 illustrate this situation, and the
results are the same as for the first case.
4.2 Bordeaux’s Results
The LBP variants exhibit a commendable rate of
ground echo elimination, with the highest score
achieved at 97.85% by LBP
riu2
, while PODP does not
exceed 75.89%. CIA remains acceptable across all
three variants, with the best score reaching 76.77%.
With WLBP and WLD-LBP, PODE stands at 92.08%
and 91.84% respectively, and PODP ranges between
80% and 82%. This highlights the effectiveness of our
proposed descriptor in preserving precipitation while
eliminating ground echoes.
Notably, the ratio of parameter b to c+d is consid-
erably higher, owing to the greater number of precip-
itation pixels compared to ground echoes. Misclas-
sification of 1% of precipitation echoes corresponds
to 13782 pixels, representing 15% of ground echoes,
significantly impacting the SR and CSI. FARE varies
within the range of (73 − 84%), which is compara-
Enhancing Echo Processing Through the Integration of Support Vector Machine and Weber’s Law Descriptors
23

Table 2: Statistical parameters.
POD (Echoes) POD (Precipitations) FAR (Echoes) FAR(Precipitations)
PODE =
d
c+d
PODP =
a
a+b
FARE =
b
b+d
FARP =
c
c+a
Success Ratio Critical Success Index Correct Identification
Accuracy
/
SR =
d
b+d
CSI =
a
a+b+c
CIA =
a+d
a+b+c+d
/
Table 3: Number of pixels used in training and testing for Setif databases.
Combination category PODE PODP FARE FARP SR CSI CIA
LBP
U2
R1 83.74 62.48 35.19 17.66 64.80 57.56 72.09
LBP
U2
R2 77.85 16.36 56.56 52.73 43.43 38.65 44.16
LBP
U2
R3 85.56 11.79 55.55 50.23 44.44 41.34 45.13
LBP
ri
R1 85.52 56.52 38.13 17.43 61.86 56.00 69.63
LBP
ri
R2 67.81 57.18 43.36 31.70 56.63 44.63 61.98
LBP
ri
R3 61.41 63.65 41.78 33.33 58.21 42.62 62.63
LBP
riu2
R1 79.60 63.45 35.76 20.95 64.23 55.15 70.75
LBP
riu2
R2 81.64 53.34 40.92 22.10 59.07 52.14 66.13
LBP
riu2
R3 72.66 65.69 45.54 19.017 54.45 45.19 68.21
WLD 84.69 94.15 7.71 11.82 92.28 79.09 89.88
WLBP 92.51 76.34 23.66 7.48 76.33 71.89 83.65
WLD-LBP 92.51 80.97 5.06 26.26 94.93 88.15 90.13
(a) Filtered image with LBP
u2
. (b) Case of separated echos image
D − LBP.
Figure 5: Example of filtered images.
(a) Filtered image with LBP
u2
. (b) Filtered image with
W LD − LBP.
Figure 6: Example of two combination categories.
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
24
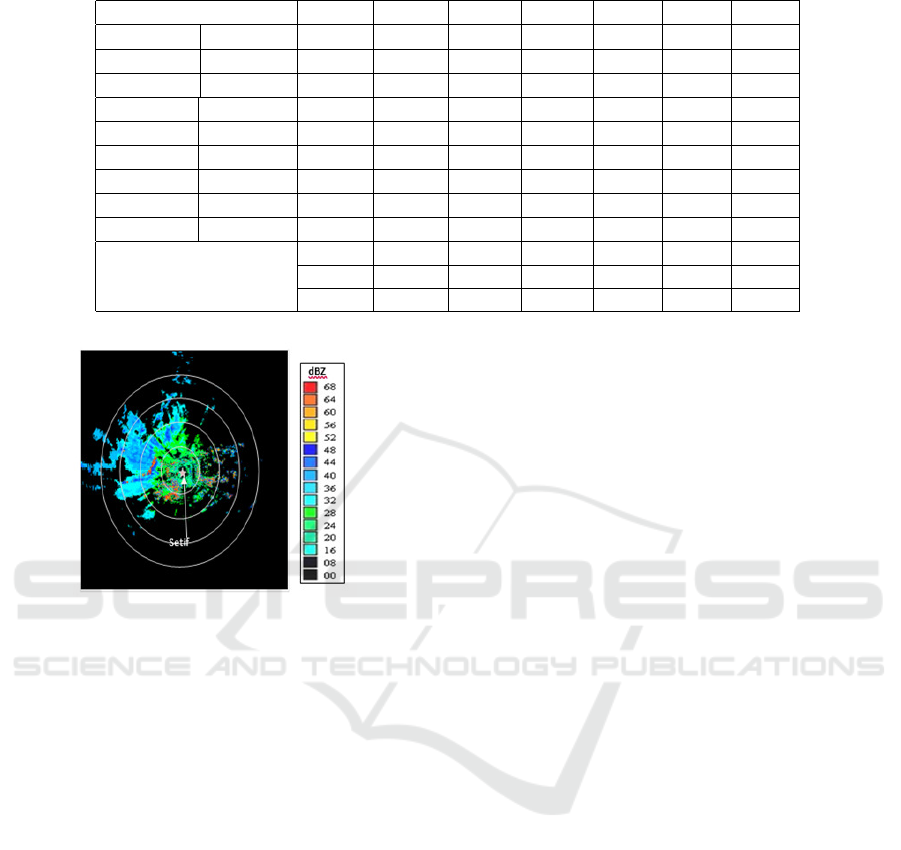
Table 4: Number of pixels used in training and testing for Bordeaux databases.
Combination category PODE PODP FARE FARP SR CSI CIA
LBP
U2
R1 91.39 66.42 84.55 0.86 15.44 15.22 67.99
LBP
U2
R2 93.23 48.57 89.70 0.87 10.29 10.21 51.23
LBP
U2
R3 96.42 41.75 90.04 0.56 9.95 9.92 45.17
LBP
ri
R1 89.73 75.89 79.77 0.91 20.22 19.76 76.77
LBP
ri
R2 93.29 62.79 85.64 0.70 14.35 14.20 64.70
LBP
ri
R3 70.85 56.9 90.08 3.30 9.9 9.5 57.81
LBP
riu2
R1 89.54 69.08 83.78 1.00 16.21 15.91 70.36
LBP
riu2
R2 95.60 49.39 88.78 0.59 11.21 11.15 52.28
LBP
riu2
R3 97.85 44.13 90.14 0.30 9.85 9.83 47.29
WLD 88.45 80.17 76.02 1.00 23.97 23.24 80.72
WLBP 92.08 66.07 84.64 0.79 15.35 15.15 67.70
WLD-LBP 91.84 82.76 73.74 0.65 26.25 25.66 83.33
Figure 7: Image with ground echoes cover precipitations.
tively high due to the extensive surface area of pre-
cipitations.
As for the reflectivity-SVM method, our ex-
periments yield the following performance met-
rics: PODE: 97.81%, FARE: 19.81%, SR: 80.19%,
CSI: 78.78%, and CIA: 88.40%. Conversely, the
reflectivity-NN method produces the following re-
sults: PODE: 88.40%, FARE: 19.81%, SR: 80.19%,
CSI: 78.78%, and CIA: 88.4%, consistent with find-
ings reported in (Ojala et al., 2002).
Importantly, our approach demonstrates supe-
rior suppression of ground echoes compared to the
reflectivity-NN approach. Furthermore, our proposed
methods utilizing WLD and WLD-LBP, when evalu-
ated at the Setif site, outperform the techniques intro-
duced in (Islam et al., 2012).
5 CONCLUSION
In this study, we initiated on an exploration of various
descriptors aimed at effectively characterizing radar
echoes. Among these descriptors, we investigated
the Weber Law Descriptor (WLD), Local Binary Pat-
tern (LBP), and Weber-LBP (WLBP). The WLD fur-
nishes a comprehensive representation of each 3 × 3
region by capturing its excitation difference and ori-
entation components. Simultaneously, the LBP and
WLBP furnish complementary insights across differ-
ent scales, thereby enriching the descriptive power of
our approach.
By combining the strengths of these descriptors,
we developed the WLD-LBP method, employed for
training Support Vector Machine (SVM) classifiers.
These classifiers were assigned the task of distin-
guishing between different types of radar echoes.
While our preliminary findings are promising, there
is still significant scope for improvement. This could
entail meticulous parameter tuning during training or
exploring alternative descriptors that may better cap-
ture the unique characteristics of our data.
Our research provides valuable insights into the
advancement of robust techniques aimed at filtering
out ground echoes from weather radar images while
preserving vital precipitation information. This un-
dertaking represents a noteworthy stride towards im-
proving the precision and dependability of radar data
analysis in meteorological contexts. Moving forward,
our future work will focus on addressing challenges
such as optimizing the fusion of descriptors, enhanc-
ing the adaptability of classifiers to diverse weather
conditions, and exploring innovative methods for han-
dling complex radar data scenarios.
REFERENCES
Cervantes, J., Garcia-Lamont, F., Rodriguez-Mazahua, L.,
and Lopez, A. (2020). A comprehensive survey on
support vector machine classification: Applications,
challenges and trends. pages 6189–215.
Chen, J., Shan, S., He, C., Zhao, G., Pietikainen, M., Chen,
Enhancing Echo Processing Through the Integration of Support Vector Machine and Weber’s Law Descriptors
25

X., and Gao, W. (2010). Wld: A robust local image
descriptor. In IEEE Transactions on Pattern Analysis
and Machine Intelligence, pages 1705–1720.
Cho, Y., Lee, G., Kim, K., and Zawadzki, I. (2006). Identi-
fication and removal of ground echoes and anomalous
propagation using the characteristics of radar echoes.
pages 1206–1222.
Cortes, C. and Vapnik, V. (1995). Support-vector networks.
pages 273–297.
Fathi, M., Kashani, M., Jameii, S., and Mahdipour, E.
(2022). Big data analytics in weather forecasting: A
systematic review. pages 1247–1275.
Haddad, B., Adane, A., Mesnard, F., and Sauvageot, H.
(2000). Modeling anomalous radar propagation using
first-order two-state markov chains. pages 283–292.
Haddad, B., Adane, A., Sauvageot, H., Sadouki, L., and
Naili, R. (2004). Identification and filtering of rainfall
and ground radar echoes using textural features. pages
4641–4656.
Hedir, M., Demim, F., and Haddad, B. (2018). Radar echoes
classification based on local descriptor. In IEEE In-
ternational Conference on Signal, Image, Vision and
their Applications, pages 1–6.
Hedir, M., Demim, F., and Haddad, B. (2019). A compara-
tive analysis of the ground clutter suppression on me-
teorological images. In IEEE 6th International Con-
ference on Image and Signal Processing and their Ap-
plications, Mostaganem, Algeria, pages 1–7.
Hedir, M. and Haddad, B. (2016). Automatic system for
radar echoes filtering based on textural features and
artificial intelligence.
Islam, T., Rico-Ramirez, M., Han, D., and Srivastava, P.
(2012). Artificial intelligence techniques for clut-
ter identification with polarimetric radar signatures.
pages 95–113.
Kaissassou, S., Lenouo, A., Tchawoua, C., Lopez, P., and
Gaye, A. (2015). Climatology of radar anomalous
propagation over west africa. pages 1–12.
Liu, F., Tang, Z., and Tang, J. (2013). Weber local binary
pattern for local image description. pages 325–335.
Malki, Z., Atlam, E., Hassanien, A., Dagnew, G., Elhos-
seini, M., and Gad, I. (2020). Association between
weather data and covid-19 pandemic predicting mor-
tality rate: Machine learning approaches. pages 110–
137.
Ojala, T., Pietikainen, M., and Maenpaa, T. (2002). Mul-
tiresolution grey-scale and rotation invariant texture
classification with local binary patterns. pages 971–
987.
Paixao, E., Mirza, M., Shephard, M., Auld, H., Klaassen,
J., and Smith, G. (2015). An integrated approach
for identifying homogeneous regions of extreme rain-
fall events and estimating IDF curves in Southern On-
tario, Canada: Incorporating radar observations.
Rouigueb, A., Demim, F., Belaidi, H., Messaoui, A., Bena-
tia, M., and Djamaa, B. (2023). Improving the license
plate character segmentation using na
˜
A¯ve bayesian
network. In Proceedings of the 20th International
Conference on Informatics in Control, Automation
and Robotics (ICINCO 2023), Rome, Italy, pages 61–
68. Giuseppina Gini; Henk Nijmeijer and Dimitar
Filev.
Rouigueb, A., Demim, F., Nemra, A., and Djamaa, B.
(2022). Gearbox fault diagnosis using the short-time
cepstral features. In Proceedings of the 2nd IEEE In-
ternational Conference on Advanced Electrical Engi-
neering (ICAEE), pages 1–8. IEEE.
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
26
