
A Pipeline for the Automatic Evaluation of Dental Surgery Gestures in
Preclinical Training from Captured Motions
Mohamed Nail Hefied
1
, Ludovic Hamon
1
and S
´
ebastien George
1
, Val
´
eriane Loison
2
, Fabrice Pirolli
2
,
Serena Lopez
2
and Rapha
¨
elle Cr
´
etin-Pirolli
2
1
LIUM, Le Mans Universit
´
e, France
2
CREN, Le Mans Universit
´
e, France
mohamed nail.hefied, ludovic.hamon, sebastien.george, valeriane.loison, fabrice.pirolli, raphaelle.pirolli @univ-lemans.fr,
Keywords:
Automatic Gesture Evaluation, Motion Capture, Dental Surgery.
Abstract:
This work in progress proposes an automatic evaluation pipeline for dental surgery gestures based on teacher’s
demonstrations and observation needs. This pipeline aims at supporting learning in preclinical situations for
the first years of study in the dental school. It uses the Random Forest (RF) algorithm to train a model based
on specific descriptors for each gesture component, that are designed to cover the evolution of the observation
needs. The inputs are the captured motion parts whose labels are defined by the teachers with their own
vocabulary, to represent expected or no-wanted geometrical or kinematic features. The overall evaluation (for
example, weighted average of each component) and the component evaluation can be given to students to
improve their postures and motor skills. A preliminary test correctly classifies a back correct posture and
three main flaws (”Twisted Back and Bent Head”, ”Leaning Back”, ”Leaning Back and Bent Back”) by the
RF model, for the posture component. This approach is designed for the adaptation to the expert’s evolving
observation needs while minimizing the need for a heavy re-engineering process and enhancing the system
acceptance.
1 INTRODUCTION
Training in dentistry begins with a preclinical period,
dedicated to the learning of the most common pro-
cedures such as clinical examination, cavity prepara-
tion, tooth preparation for the crown placement, etc.
It is also important to learn how to adopt the right
postures to preserve the practitioner health and pre-
vent pathologies, such as the development of Muscu-
loSkeletal Disorders (MSD) (FDI, 2021).
During the preclinical period, students train on
conventional simulators, also known as physical sim-
ulators or ”phantom”, consisting mainly of (i) a man-
nequin head (fig.3(a)) (ii) a model of jaws with ar-
tificial teeth (e.g., resin) that the students can insert
into the phantom mouth (iii) and various instruments,
including, mouth mirror, dental probe, rotative instru-
ments, etc. In the dental school of Nantes Univer-
sity (France), a practical session typically includes, at
least, twenty students. The assistance of teachers is
often required by a student, making them unavailable
to assist, assess and correct other students’ gestures.
Alongside conventional simulators, there are vir-
tual and haptic environments for dentistry training
such as the HRV Virteasy Dental or NISSIN SIMON-
DOT system (Bandiaky et al., 2023). These simu-
lators use force-feedback arms to replicate physical
contacts of tools with the virtual teeth. The SIMTO-
CARE Dente training system includes a phantom’s
head on which augmented pedagogical feedback is
provided. In both cases, those simulators primarily
track the instrument movements through the haptic
arm or motion sensors. It is therefore impossible to
capture the user’s body movements, which limits their
ability to evaluate the full range of a student’s techni-
cal gesture.
Nowadays, with motion capture (mocap) systems,
one can record any motion-based activities to analyze
and evaluate them and/or to build a dedicated Virtual
Learning Environment (VLE) in which 3D avatars of
the teachers and learners can be displayed in real time
(Djadja et al., 2020; Le Naour et al., 2019). Mo-
cap solutions also include those based on pose esti-
mation in computer vision (e.g. OpenPose and Medi-
aPipe). Movement data are often represented by a tree
of joints (or skeleton) as shown in fig.3(e), each node
420
Hefied, M., Hamon, L., George, S., Loison, V., Pirolli, F., Lopez, S. and Crétin-Pirolli, R.
A Pipeline for the Automatic Evaluation of Dental Surgery Gestures in Preclinical Training from Captured Motions.
DOI: 10.5220/0012685000003693
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Computer Supported Education (CSEDU 2024) - Volume 1, pages 420-427
ISBN: 978-989-758-697-2; ISSN: 2184-5026
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

containing a time series made of the 3D positions and
orientations of the join over time.
The gesture learning can be considered accord-
ing to three non-exclusive viewpoints: (a) the obser-
vation and the imitation of the expert gestures (Liu
et al., 2020; Oagaz et al., 2022) (b) the learning of
geometric, kinematic and dynamic features or (c) se-
quence of actions (focusing on reaching specific dis-
crete states of manipulated objects regardless of the
user’s underlying movements)(Djadja et al., 2020). In
this context, the pedagogical strategy can vary from
one teacher to another for the same task. However,
most existing current evaluation systems or VLE, ne-
glect the motion-based evaluation process (neglect (a)
and (b)) or the adaptation to the teacher’s expertise
that restricts the tool acceptance.
Consequently, the aim of this study is to propose
a method and an operationalizable architecture able
to: (a) automatically evaluate the dental surgery ges-
tures using mocap systems, (b) integrate the teacher’s
expertise, in terms of gesture execution, to assist the
students in their learning.
The main contributions of this work are the fol-
lowing ones:
- An analysis and decomposition of the dental techni-
cal gestures into evaluable motion-based components,
making it possible to provide feedback to the learner
and integrate the teacher’s expertise thanks to each
component.
- The proposal of an operationalizable approach for
the automatic evaluation that addresses the dental
surgery gesture at the component level and as a whole.
- The challenges and solutions to make this approach
adaptable to the teacher’s evolving observation and
analysis needs, independent of the simulator type
(conventional or virtual and haptic), independent of
the motion capture system used as long as it provides
skeletal data, and independent of the task to learn.
Although machine learning algorithms are used in this
work, this study does not aim at contributing to the
machine learning domain. AI is a technical solution
to address our questions, not a goal in itself. More-
over, the automatic evaluation of the procedure (e.g.,
quality of the preparation, shape of the teeth, % of the
removed dental cavity) are currently out of the scope
of this work in progress.
The article is structured as follows. Section 2 re-
views automatic gesture evaluation in the literature.
Section 3 presents a survey on teacher practices and
the potential advantages of an automatic gesture eval-
uation system to assist them and preclinical students.
Section 4 breaks down dental surgery gestures. Sec-
tion 5 describes the proposed system architecture.
Section 6 depicts initial validation tests and discusses
the results and the proposal, while section 7 gives the
perspectives of this work.
2 RELATED WORKS
Many studies focus on specific aspects such as the
posture of oral health professionals (Bhatia et al.,
2020; Maurer-Grubinger et al., 2021; Pispero et al.,
2021; FDI, 2021). However, to our current knowl-
edge, it seems that there are no studies that fully ad-
dress the automatic evaluation of gestures in dental
surgery.
In other application domains, the automatic eval-
uation of gestures relies mainly on the analysis of
movement data based on the teacher expertise. For
instance, in the table tennis domain, the expert obser-
vation needs, related to forehand and backhand stroke
gestures, were translated into metrics computed from
movement data, while the gesture acceptability values
were extracted from the pre-recorded demonstrations
of the expert with a tolerance factor (Oagaz et al.,
2022). Another study focused on the performances
of novice salsa dancers compared to regular dancers
(Senecal et al., 2020). Following the suggestions of
dance experts, three criteria were proposed to repre-
sent the essential salsa skills (Rhythm, Guidance, and
Style). The gesture was not studied as a whole but as a
set of components, each of them associated with spe-
cific descriptors based on two popular motion analy-
sis systems (MMF and LMA). A review of expressive
motion descriptors, all based on kinematic, dynamic,
and geometric features, was conducted (Larboulette
and Gibet, 2015). However, other kinds of descrip-
tors exist. Regarding postures, several studies used
a score-type descriptor called the Rapid Upper Limb
Assessment (RULA) score (Maurer-Grubinger et al.,
2021; Bhatia et al., 2020; Manghisi et al., 2022). The
RULA score is an ergonomic measure that evaluates
the postural risk of the body during a task. It assigns
a rating on a scale (1 safe to 7 dangerous) to a pos-
ture. The RULA score was adapted to the practice of
oral health professionals, evaluating the postural risk
during a therapeutic act for approximately 60 seconds
(Maurer-Grubinger et al., 2021). In most of the cases,
the descriptors are specifically chosen or designed for
the task to learn, leading to significant engineering
challenges if the observation needs or the task evolve.
An approach adapted to the evolution of the ex-
pert’s needs while minimizing the reengineering pro-
cess relies on the motion capture of the expert com-
bined with spatial similarity techniques such as the
Dynamic Time Warping (DTW). DTW aims at com-
paring the shape of two-time series without consider-
A Pipeline for the Automatic Evaluation of Dental Surgery Gestures in Preclinical Training from Captured Motions
421

ing the temporal aspect. The lesser the DTW score is
the closer the two series are. An acceptance thresh-
old must be empirically defined. For instance, a VLE
(Liu et al., 2020) used DTW to compare the Tai Chi
movements of a learner with a virtual coach replaying
the pre-recorded movements of the expert, while pro-
viding a similarity score. However, it is reasonable to
question the pedagogical effectiveness of such a kind
of score-based approach as it does not provide infor-
mation about specific incorrect aspects of the gesture.
Another method consists in using supervised ma-
chine learning algorithms trained on motion-based
data. In the context of home-based physical therapies,
a study adopted a two-step machine learning classifi-
cation approach that recognized the exercise among
10 types and then, evaluated whether the exercise
is correctly executed or not (Garc
´
ıa-de Villa, 2022).
They collected and used data from four IMUs placed
on volunteers’ limbs that performed each exercise se-
ries four times. Putting aside the complex process-
ing chain of motion capture, the expert can train the
model to evaluate new movements. However, the sys-
tem’s output is binary and does not provide relevant
feedback to correct or enhance the gesture. The IANB
gesture (Inferior Alveolar Nerve Block anesthesia)
was evaluated (Sallaberry et al., 2022). The VIDA
Odonto simulator collected the position and orienta-
tion of the syringe in the virtual environment. Sev-
eral features were extracted from the collected data
(e.g., mean jerk, penetration angle) and a compari-
son of the performances of different machine learn-
ing classification algorithms (Naive Bayes, Random
Forests, Multi-Layer Perceptrons, and Support Vec-
tor Machine) and feature selection/fusion algorithms
(ReliefF and PCA) was carried out. However, the out-
put only discriminated between expert and novice lev-
els without more information to guide the learners.
In a study aiming at assisting the rehabilitation pro-
cess of stroke patients (Weiss Cohen and Regazzoni,
2020), authors developed a system based on a leap
motion as a hand-tracking device. The hand move-
ments of the physiotherapist served to build a ref-
erence model. The gesture must be repeated 20-30
times. Joint angles were extracted and stored in a vec-
tor for each frame for each sample. A KNN algorithm
allowed averaging the vectors for each frame of an
exercise during the training phase. The system gen-
erated feedback for each finger separately, based on
the angle difference, indicating the gap with the ref-
erence movement. The output was divided into four
flexible segments that can be defined by users. An
evaluation system based on ML is often designed as a
proof of concept for the automatic evaluation perfor-
mances. Despite, most of the existing systems limit
the evaluation to an overall appreciation, the defini-
tion of output classes by the teachers can be relevant
in terms of pedagogical feedback.
Systems only based on low-level descriptors are
not adaptable to the evolution of tasks or observation
needs. DTW and ML existing approaches can coun-
terbalance this issue, but often overlook pedagogical
feedback. Regarding dental surgery techniques, there
is not one perfect motion i.e. various biomechanical
approaches are viable as long as they meet the ex-
perts’ criteria for each gesture aspect. Consequently,
there is a challenge in designing a system adapted to
the teachers’ practices and their evolution, while pro-
viding feedback to the learner related to those criteria.
The expectations of such a system are discussed in the
next section.
3 EVALUATION EXPECTATIONS
To gather teaching practices, observation and analysis
needs in relation to technical gestures and their evalu-
ation, a qualitative survey was carried out using semi-
directive interviews with eleven teachers from several
disciplines (Prosthetics, Restorative Dentistry and En-
dodontics (DRE) and Pediatric Dentistry) at the den-
tal school of Nantes University. The semi-directive
interviews, lasting an average of thirty-five minutes,
were conducted by a pair made of a computer sci-
entist researcher and an educational researcher. The
interview recordings were anonymized and the audio
files transcribed. A thematic analysis of the verbatim,
by manually coding the discourse segments, was car-
ried out using the Nvivo software. The main topics of
the interview and their results are exposed below.
Work Session and Formative Evaluation. A Prac-
tical Work (PW) session, dedicated to working on
conventional simulators, generally includes about
”twenty” (ens1) students supervised by a teacher, as-
sisted either by monitors (students with a higher level
of study) or operating alone. A formative evaluation,
without grading, is carried out at each stage of the ex-
ercise by the teacher or monitors, based on their ob-
servations or at the student’s request: ”It’s to validate
the steps as they are carried out” (ens3);”each time,
we give them a little advice on what was done well
and what must be improved” (ens2);
High Demand on Teachers and Procedure Results
vs. Gesture Evaluation. The demands placed on
teachers and monitors are considerable, due to the
size of the student groups: ”when you’re managing
20 or 23 students, that’s a lot, and you’re not neces-
sarily available at the right time” (ens1). Therefor,
assessment primarily focuses on the result of the den-
CSEDU 2024 - 16th International Conference on Computer Supported Education
422

tal surgery procedure, rather than the technical ges-
tures performed by students: ”after a while, even for
us, we’re human, so we end up looking mainly at the
clinical aspect, the final result (...) whereas the means
to achieve it, is very important” (ens2).
Dental Preparation vs. Gesture Concerns. A ses-
sion can last between 1h30 and 3h00, and the number
and duration of PW sessions are limited by the density
of the required teaching, ”the problem is that if at a
given session, the student hasn’t assimilated all infor-
mation (...) it’s a bit lost, given that at the next session
we’ll move on to another exercise” (ens7). In addition
to the preparation, ”for them, the working position,
ergonomics, are a secondary objective (...) and they
may find it easier or quicker to bend their neck to see
better and perform the gesture” (ens3) that is not rec-
ommended to avoid MSD.
Interests of Automatic Evaluation of Technical
Gestures. The interest of automatic evaluation of
technical gestures is to (i) ”help because it’s compli-
cated to manage all the students” (ens2) for whom
”you have to repeat over and over again (...) and who
regularly forget their work position” (ens3) (ii) cal-
culate metrics in real or near-real time, which can
be used to provide feedback to the student on the
technical gesture (e.g.: Your back is bent, stand
straight, lower your elbows...) ”if it’s something to
tell to students, it might be more educational for them,
and especially for all those we don’t see at a given
moment”(ens9) (iii) standardize practices further,
and ”perhaps smooth out the level between different
groups a little more, and ensure that certain trans-
missions of information are not teacher-dependent,
because certain choices of instruments, for example,
certain set-ups, certain working position will be a
matter of habit, a matter of personal feeling. (...)
we don’t practice in the same way (...) as long as it
remains within a framework where it’s done in good
conditions”(ens5).
An automatic system for evaluating students’ ges-
tures can help teachers, who face high demands and
repetitive gesture issues. This system allows students
to focus on procedures while being reminded of the
correct gestures. This is possible if the dental surgery
gesture is formalized in a frame made of interpretable,
operationnalisable and evaluable components, allow-
ing the integration of teachers’ observation needs, as
discussed in the next section.
4 DENTAL SURGERY GESTURE
In addition to interviews with teachers, two visits
were made during PW sessions at the dental school of
Nantes University, to observe and perform a PW (i.e.,
preparing a tooth for the placement of a crown). Fur-
thermore, an analysis of the two PW notebooks of the
teachers, in Prosthetics, Restorative Dentistry and En-
dodontics was conducted, along with a review of the
2021 ergonomic recommendations for oral health pro-
fessionals (FDI, 2021) published by the FDI (World
Dental Federation). Based on the gathered pieces of
information, the surgery dental gesture can be broken
down as follows.
Posture. This component qualifies the body part con-
figuration to adopt: (i) The natural curvatures of the
spine must be respected (cervical lordosis, thoracic
kyphosis, lumbar lordosis). The forward body must
not lean (bust/leg angle ≥ 90
◦
). No excessive bend-
ing or twisting of the spine (including back and head)
must be observed. The head slightly tilts forward.
(ii) Arms can be at rest or almost alongside the torso
(20° between vertical and arms). There is no abduc-
tion of the shoulders. The practitioner’s elbows are
close to the body and do not protrude. Forearms are
in front of the body (elbow angle 60°). Wrists held in
a neutral and straight position. (iii) One must observe
legs apart and lower legs vertical (knee angle 90° to
100° degrees). Feet must be flat on the floor.
Sitting Orientation. This component represents
the practitioners’ seated position around the patient’s
head, according to their dominant arm. The space
occupied by a right-handed person must be between
9 and 12 o’clock (12 and 3 o’clock for left-handed
one). In this interval, and depending on the tooth to
be treated, the practitioners must opt for a positioning
that enable them to better see the tooth.
Instrument Holding and Fulcrum (Finger Rest).
Errors in holding rotative instruments are recurrent,
and difficult to detect in a PW context, requiring the
teacher to be close to each student’s workstation.
The instrument should be held like a pen by three
fingers (thumb, index and middle fingers) close to the
head of the instrument, to control the pressure applied
to the tooth. The other two fingers are positioned as
close as possible to the preparation, ideally on the
same working arch, acting as a fulcrum on the tooth
or gum. The objective is not working with a floating
hand but following the patient’s arch to have an ac-
curate motion, reduce muscular load and fatigue, and
avoid injuring the patient.
Asepsis. In addition to complying with general asep-
sis guidelines, such as wearing goggles, masks, the
gloves of the practitioner must not touch anything
other than the patient’s oral cavity (e.g., tooth, arch,
gum), and the instruments placed on the operating
field. The goal is to monitor parasitic movements e.g.,
scratching one’s nose or head, leaving a free hand on
A Pipeline for the Automatic Evaluation of Dental Surgery Gestures in Preclinical Training from Captured Motions
423
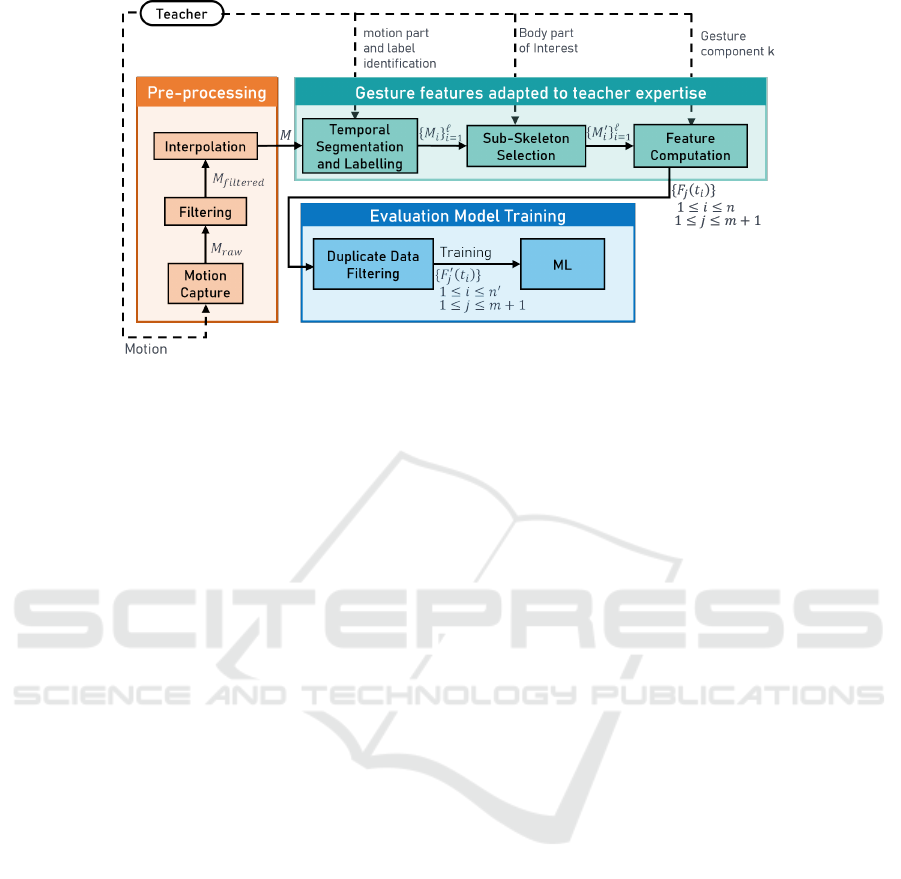
Figure 1: Training phase.
their own pants, etc., This kind of gestures leads to
hygiene faults.
All the previous four components were validated
by the three teachers implied in the visits. Despite the
given specific measurements and values provided by
the aforementioned pedagogical documents, the auto-
matic evaluation system should encompass all gesture
aspects, while being adaptable to changes and toler-
ance (e.g. is 91°, 92°, etc., an acceptable value for
the bust/leg angle ?). Consequently, the next section
outlines a pipeline based on gesture components, ana-
lyzed each with descriptors able to integrate the teach-
ers’ expertise from their demonstrations.
5 PROPOSED EVALUATION
PIPELINE & METHOD
This section outlines the proposed evaluation
pipeline, which includes training individual Machine
Learning (ML) models for each gesture compo-
nent, identified in the previous section, to conduct
continuous learner assessments.
5.1 Training Phase
Fig.1 illustrates the initial phase of the ML model
training, applicable for each gesture component, and
using generic descriptors computed from labeled
teacher demonstrations. Therefore, for a given com-
ponent, this phase begins by asking the expert to pro-
vide good and/or bad demonstrations.
Motion Capture and Filtering. The expert’s move-
ments are captured using a motion capture system
such the Qualysis infrared system. M
raw
is the raw
motion data structure. This raw data can be noisy,
containing inconsistent or missing values, and must
therefore be manually filtered (linear, polynomial,
Savitzky Golay, relation filters, etc.) to obtain a clean
motion M
f iltred
.
Interpolation. An interpolation process will gener-
ate the motion M with the desired frequency or frame
number, as a mocap system with a high frequency can
generate too much data than the system can handle in
a reasonable time.
Temporal Segmentation and Labeling. From M,
the experts (or teachers) identify (non-)acceptable se-
quences {M
i
}
ℓ
i=1
with ℓ being the number of labels.
They must visualize the 3D motions and give the cor-
responding time periods and labels. The teacher may
define and identify as many (non-)acceptable motion
parts as they want in the way they want (e.g., correct,
incorrect, almost correct, bending back, head leaning,
weird shoulder position, etc.).
Sub-Skeleton Selection. From the complete joint
tree, the teacher selects the branches (succession of
joints) representing the body part of interest for a ges-
ture component. This module returns the {M
′
i
}
ℓ
i=1
la-
beled motion spatially trimmed to the desired set of
joints.
Feature Computation. This module computes pre-
defined features (or descriptors) for a given gesture
component. The challenge here is to find an appro-
priate set of features adapted to the evolution of the
teaching practices, i.e., any expert could integrate new
gestures to identify without changing the descriptors
for the component. The proposed features are the fol-
lowing ones:
- (i) Posture and instrument holding: the joint orien-
tation (quaternion) from a movement expressed in a
local coordinate system, plus normalized directional
CSEDU 2024 - 16th International Conference on Computer Supported Education
424
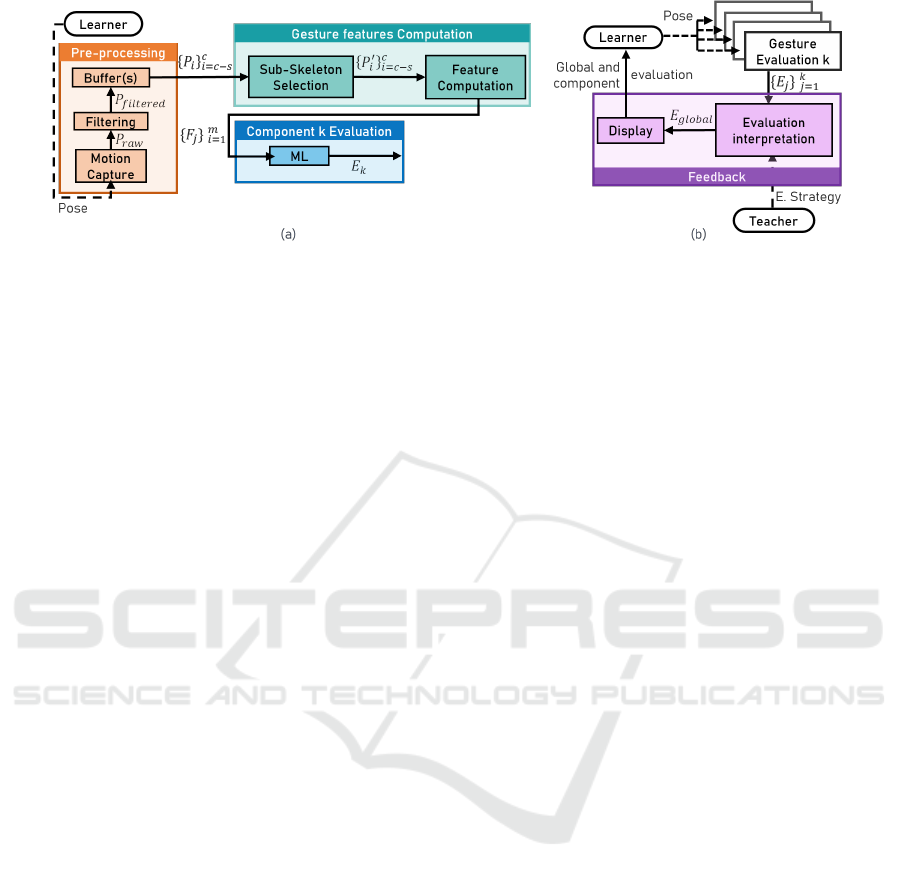
Figure 2: (a) Evaluation phase per gesture component (b) Evaluation feedback.
vectors from the root joint to each of the other joints
computed from a movement expressed in a global co-
ordinate system(fig. 3(e)).
- (ii) Sitting orientation: the angle between a straight
line connecting the root joint to a reference point on
the operating area, and a fixed reference line (e.g., 12
o’clock).
- (iii) Asepsis: distances between hand and wrist
joints to other body joints.
The fulcrum is currently being studied and features
will be proposed in the future. The output {F
j
(t
i
)}
of this module is a data table with n row (frame) and
m + 1 column (time series of features and a label col-
umn).
Duplicate Data Filtering. This module parses
{F
j
(t
i
)} with a sliding window to compare rows and
filter out duplicates that do not meet a threshold to
return {F
′
j
(t
i
)} with n
′
< n. The objective is to only
keep distinctive necessary samples for the ML train-
ing process.
ML. The machine learning module will correlate the
training samples to their expected labels defined by
the teacher. The chosen algorithm is the Random For-
est (RF). This algorithm is non-dependent to a dis-
tance function as heterogeneous component features
can be considered in different kinds of distance func-
tion (Euclidean, spherical, geodesic, etc.). Decision
trees generated by a Random Forest identify the most
informative data divisions by maximizing informa-
tion gain or minimize entropy. This algorithm is also
known to perform well with few data as one cannot
ask a teacher to make many demonstrations.
5.2 Evaluation Phase
Now that the ML model is trained with the teacher’s
(non)acceptable gesture demonstrations, it can be
used to evaluate the learner’s gestures. Figure 2(a) de-
scribes the pipeline to evaluate a single gesture com-
ponent based on a capture of the learner’s pose P
(i.e., the joint tree in a single frame) for (near) real-
time evaluation. {P
i
} contains s poses (i.e. short mo-
tion part) stored by the buffer module for later com-
putation of descriptors requiring several poses (e.g.,
speed), while {P
′
i
} is the sub-skeleton trimmed ac-
cording to the targeted subset of joints of interest de-
fined by the teacher. Finally, the ML block infers a
class for the gesture component.
Figure 2(b) shows the feedback information sent
to the learner. This feedback is composed of two
kinds of information. The first information is the in-
ferred class corresponding to the teacher’s label for
each gesture component. The second information,
E
global
gathers {E
j
} predictions to deliver a global
evaluation, defined by the teacher’s evaluation strat-
egy (e.g., a score based on the weighted average of
each digitally transformed component). The repre-
sentation method (textual information ? Dashboard
? More advanced visual artefacts) of this evaluation
is not defined at this stage of this work.
6 PRELIMINARY TESTS &
DISCUSSION
The posture component based on the respect of the
natural curvatures of the back was implemented. To
this end, an installation was setup with a phantom at-
tached to a table and a stool positioned at 10:30 from
the head of the mannequin (figure3(a)). Surrounding
this setup are 6 Qualisys Miqus M3 infrared cameras
to capture the movements of the expert (at 100 Hz),
who is equipped with an upper-body marker set. The
figure3(e) illustrates a tree of joints. The expert simu-
lates a therapeutic act on a tooth located on the upper
arch, maintaining an acceptable posture (1 min.) and
unacceptable ones (2 min.). The table 1 depicts the
posture classes, the record sequence duration and the
number of samples (i.e. number of frames) obtained
after the duplicate data filtering. Figure3 shows each
posture classes.
After training a RF model with 100 decision trees,
A Pipeline for the Automatic Evaluation of Dental Surgery Gestures in Preclinical Training from Captured Motions
425

Figure 3: (a) Straight Back (b) Leaning Back (c) Leaning Back and Bent Back (d) Twisted Back and Bent Head (e) A skeleton
from motion capture under Unreal Engine with directional vectors (red) and normalized ones (blue) starting from the pelvis
joint, and pointing to the remaining ones.
based on 80% training 20% test split of the expert
samples (all classes mixed), our architecture is able to
perfectly recognized each good and bad posture (per-
fect accuracy score).
Table 1: Posture class, record sequence duration (seconds)
and number of frames obtained after data temporal segmen-
tation and duplicate data filtering.
Posture Class Time Samples
Straight Back 60 3273
Leaning Back 4 232
Leaning Back and Bent Back 4 182
Twisted Back and Bent Head 8 428
The above first tests offer encouraging results, but
are not yet a proof of the system’s validity and per-
formance. Other experiments will be carried out with
several teachers, their observation needs and dental
students with different morphologies. Provided that
the system proves its effectiveness, it offers the fol-
lowing advantages:
Adaptation to the Teachers’ Needs. The teachers
are actively involved in the proposed pipeline. Their
expertise relies on several provided pieces of infor-
mation: (non)acceptable motions, body parts of in-
terest, labels linked to each aspect or skill related to
the gesture to learn and the evaluation strategy com-
bining each component. All these pieces of informa-
tion does not impact the system reengineering given
that: (a) the proposed set of components to analyze
the dental gesture is valid (b) and the set of descrip-
tors for each component is carefully chosen to cover
different kinds of correct gestures and flaws for this
component. In this way, the system becomes adapt-
able to each demonstrated gesture the teacher does or
does not want to see.
Building Relevant Pedagogical Feedback. The sys-
tem architecture handles the gesture as a set of evalu-
able components. For each of these components, a
RF model is trained separately. This approach allows
for an evaluation of the overall gesture without ne-
glecting the assessment of each component represent-
ing the gesture aspect to acquire or to enhance. In
addition, the evaluation uses the teacher’s vocabulary
thanks to the labels.
System Independencies. The proposed architecture
is designed to be independent of any specific motion
capture system (as long as it provides a skeleton made
of the position and orientation of each joint), the used
simulator (conventional or haptic), the task to learn
and the pedagogical strategy (if based on the chosen
valid components and their descriptors).
Nevertheless, the following limitations and re-
maining challenges must be considered:
MoCap Process. The process of obtaining a clean
time series can be tedious. Indeed, some motion
capture devices can be costly (infrared camera-based
ones), give a good precision and require a heavy
data pre-processing (marker re-identification, interpo-
lation of lost data, etc.). Other systems are less costly
and quicker to set up, but the signal quality is worse
(depth camera, inertial units, etc.).
Proposed Architecture vs. ad-hoc Implementa-
tion. When the descriptor and range of acceptability
are considered as trivial to implement (e.g., the sitting
orientation around the phantom requires verifying an
angle within a well-defined range), the question of the
interest of an ML training process requiring the pres-
ence of a teacher, a capture session and a labeling pro-
cess can be raised.
Learning Impact. The potential impacts of the sys-
tem on learning must be considered with caution and
must be tested. The observation needs are only for-
malized through the labels associated to the demon-
strated motion parts. The system is not currently
adapted to the formalization of the underlying knowl-
CSEDU 2024 - 16th International Conference on Computer Supported Education
426

edge related to the overall healthcare procedure.
7 CONCLUSION
This work proposes a pipeline for the automatic eval-
uation of dental surgery gestures. The aim of this
system is to assist teachers and learners during prac-
tical sessions on simulators (conventional or virtual
and haptic). The expected long-term impacts are re-
lated to the improvement of motor skills in preclinical
situations, to prepare students for clinical ones, and
avoid learning motions leading to MSD. This first step
breaks down the gesture into components (posture,
sitting orientation, holding the instrument, fulcrum,
asepsis) and proposes generic descriptors for each
component. The proposed approach consists in train-
ing random forest models for each component, whose
inputs are the generic descriptors computed from the
teacher’s labeled and captured motions. Each label is
defined by teachers to integrate the observation needs
with their own vocabulary. The trained RF model can
be used to analyse the learners’ gestures by giving the
class label for each gesture component. This architec-
ture tends to tackle the challenges linked to the evalu-
ation of the often neglected geometric and kinematic
aspects of the dental gesture in the existing systems,
while avoiding a heavy reengineering process in case
of the evolution the learning situation. This work will
continue through an experiment with a dual objective:
(a) validating the pipeline in terms of evaluation per-
formances with teachers and (b), evaluating the im-
pact of the evaluation on students during practical ses-
sions.
ACKNOWLEDGEMENTS
The authors would like to thank the support given
by the French Research National Agency in funding
of the ANR PRCE EVAGO project (ANR-21-CE38-
0010).
REFERENCES
Bandiaky, O. N., Lopez, S., Hamon, L., Clouet, R.,
Soueidan, A., and Le Guehennec, L. (2023).
Impact of haptic simulators in preclinical den-
tal education: A systematic review. Jour-
nal of Dental Education, n/a(n/a). eprint:
https://onlinelibrary.wiley.com/doi/pdf/10.1002/jdd.13426.
Bhatia, V., Randhawa, J. S., Jain, A., and Grover, V. (2020).
Comparative analysis of imaging and novel marker-
less approach for measurement of postural parameters
in dental seating tasks. Measurement and Control,
53(7-8):1059–1069.
Djadja, D., Hamon, L., and George, S. (2020). Design
of a Motion-based Evaluation Process in Any Unity
3D Simulation for Human Learning:. In Proceedings
of the 15th International Joint Conference on Com-
puter Vision, Imaging and Computer Graphics The-
ory and Applications, pages 137–148, Valletta, Malta.
SCITEPRESS - Science and Technology Publications.
FDI (2021). Ergonomics and posture guidelines for oral
health professionals.
Garc
´
ıa-de Villa, S. (2022). Simultaneous exercise recogni-
tion and evaluation in prescribed routines: Approach
to virtual coaches. Expert Systems With Applications.
titleTranslation:.
Larboulette, C. and Gibet, S. (2015). A review of com-
putable expressive descriptors of human motion. In
Proceedings of the 2nd International Workshop on
Movement and Computing, pages 21–28, Vancouver
British Columbia Canada. ACM.
Le Naour, T., Hamon, L., and Bresciani, J.-P. (2019). Su-
perimposing 3D Virtual Self + Expert Modeling for
Motor Learning: Application to the Throw in Ameri-
can Football. Frontiers in ICT, 6:16.
Liu, J., Zheng, Y., Wang, K., Bian, Y., Gai, W., and Gao,
D. (2020). A Real-time Interactive Tai Chi Learning
System Based on VR and Motion Capture Technol-
ogy. Procedia Computer Science, 174:712–719.
Manghisi, V. M., Evangelista, A., and Uva, A. E. (2022).
A Virtual Reality Approach for Assisting Sustainable
Human-Centered Ergonomic Design: The ErgoVR
tool. Procedia Computer Science, 200:1338–1346.
Maurer-Grubinger, C., Holzgreve, F., Fraeulin, L., Betz,
W., Erbe, C., Brueggmann, D., Wanke, E. M., Nien-
haus, A., Groneberg, D. A., and Ohlendorf, D.
(2021). Combining Ergonomic Risk Assessment
(RULA) with Inertial Motion Capture Technology in
Dentistry—Using the Benefits from Two Worlds. Sen-
sors, 21(12):4077. Number: 12 Publisher: Multidis-
ciplinary Digital Publishing Institute.
Oagaz, H., Schoun, B., and Choi, M.-H. (2022). Real-time
posture feedback for effective motor learning in ta-
ble tennis in virtual reality. International Journal of
Human-Computer Studies, 158:102731.
Pispero, A., Marcon, M., Ghezzi, C., Massironi, D., Varoni,
E. M., Tubaro, S., and Lodi, G. (2021). Posture As-
sessment in Dentistry for Different Visual Aids Using
2D Markers. Sensors, 21(22):7717.
Sallaberry, L. H., Tori, R., and Nunes, F. L. S. (2022). Com-
parison of machine learning algorithms for automatic
assessment of performance in a virtual reality dental
simulator. In Symposium on Virtual and Augmented
Reality, SVR’21, pages 14–23, New York, NY, USA.
Association for Computing Machinery.
Senecal, S., Nijdam, N. A., Aristidou, A., and Magnenat-
Thalmann, N. (2020). Salsa dance learning evalu-
ation and motion analysis in gamified virtual real-
ity environment. Multimedia Tools and Applications,
79(33):24621–24643.
Weiss Cohen, M. and Regazzoni, D. (2020). Hand rehabili-
tation assessment system using leap motion controller.
AI & SOCIETY, 35(3):581–594.
A Pipeline for the Automatic Evaluation of Dental Surgery Gestures in Preclinical Training from Captured Motions
427
