
Deepbrokenhighways: Road Damage Recognition System Using
Convolutional Neural Networks
Sebastian Peralta-Ireijo, Bill Chavez-Arias and Willy Ugarte
a
Universidad Peruana de Ciencias Aplicadas, Lima, Peru
Keywords:
Computer Vision, Pothole Detection, Convolutional Neural Network, YOLO, MobileNet.
Abstract:
Road damage, such as potholes and cracks, represent a constant nuisance to drivers as they could potentially
cause accidents and damages. Current pothole detection in Peru, is mostly manually operated and hardly
ever use image processing technology. To combat this we propose a mobile application capable of real-time
road damage detection and spatial mapping across a city. Three models are going to be trained and evaluated
(Yolov5, Yolov8 and MobileNet v2) on a novel dataset which contains images from Lima, Peru. Meanwhile,
the viability of crack detection through bounding box method will be put to the test, each model will be trained
once with cracks annotations and without. The YOLOv5 model was the one with the best results, as it showed
the best mAP50 across all of out experiments. It got 99.0% and 98.3% mAP50 with the dataset without crack
and with crack annotations, correspondingly.
1 INTRODUCTION
Currently, many third world countries struggle to
maintain their roads pothole and crack free. Stud-
ies in Peru like (D
´
avila Estrada, 2022) showed that
around eight to ten potholes are present on average,
over a one kilometer road range. Furthermore the
lifespan of these roads should be close to twenty five
years, nevertheless, the real span is about four to six
years. As written in (Ministerio de Transportes y Co-
municaciones, 2015), current government road explo-
ration procedures don’t include a detailed detection of
road damage. This turns the damage mapping into a
lengthy and manual process, if needed. That being
said, nowadays few companies devoted to roadwork
like (Tenorio Construcciones y Soluciones, 2022) use
software to map the damage present in a road before
any work is done. That motivates us to tackle the
problem of slow detection and mapping of road dam-
age.
We aim to develop an application, capable of inte-
grating real time detection and mapping of road dam-
age. Aiding in the optimization of road damage de-
tection for organizations which carry out road main-
tenance. This will allow people to benefit from au-
tomation via Deep Learning models, as well as ob-
taining a detection process free of human subjectiv-
a
https://orcid.org/0000-0002-7510-618X
ity. Thus, making a contribution to the optimization
of road maintenance projects. While there are solu-
tions that deal with pothole and crack detection, their
method or end product doesn’t line up with our ob-
jectives. For example, vibration based models like
(Egaji et al., 2021) are successful in the damage de-
tection, but lack the capabilities of providing a visual
feedback of the damage and require the use of a vehi-
cle and sensors. Furthermore other solutions that in-
volve computer vision stop at the experimental phase,
maximizing the proposed model detection capability
through the use of innovative image processing like in
(Aparna et al., 2022). Yet, their image dataset features
do not match most of the approaches, since it involves
heatmap imaging and specialised equipment.
Some solutions that involve the integration of road
damage detection model and a application like (Dong
et al., 2022) and (Patra et al., 2021). However, in
(Dong et al., 2022) the UI design and usage wasn’t
friendly to the average person, as results were shown
on a console like interface. Also it required the use of
a small vehicle to carry out the detection which lim-
its it’s capabilities to a specific viewpoint. In (Patra
et al., 2021) the solution limits itself to the exclusive
detection of pothole as a generalized label. Meaning
that their model is binary, either a part of an image is a
pothole or not, simplifying the training of the model.
Also, road crack detection was left out of the training
of the model leaving various improvement points for
Peralta-Ireijo, S., Chavez-Arias, B. and Ugarte, W.
Deepbrokenhighways: Road Damage Recognition System Using Convolutional Neural Networks.
DOI: 10.5220/0012685600003690
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 26th International Conference on Enterprise Information Systems (ICEIS 2024) - Volume 1, pages 739-746
ISBN: 978-989-758-692-7; ISSN: 2184-4992
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
739

us to explore. Our approach intends to use a convolu-
tional network architecture that is optimized for real
time detection and a user friendly mobile application
to go alongside it.
The key components of our approach are a
YoloV5 model trained with some of the state of the
art road damage datasets and meant for Bounding Box
detection. This data will be expanded upon by the cre-
ation of our own dataset containing images from our
specific context, Lima and Callao, Peru. That being
said, using the mobile development framework Flut-
ter, we will develop an app that takes advantage of
the model for road damage detection (potholes of dif-
ferent sizes and depth and road cracks) and damage
mapping using one of the available modules.
Our main contributions are as follows:
- We elaborate a dataset with the characteristics of
the context in which our application will be utilized.
- We developed a mobile application that is able to
detect in real time types of potholes and cracks using
convolutional networks.
- We test the viability of road cracks detection with
a bouding box method through a quantitative analy-
sis of different models based on metrics (ex. Average
Precision and mAP50).
This paper is distributed into the following sec-
tions: First, we review related work on road damage
detection in Section II. Then, we discuss relevant con-
cepts and theories related to the background of our
research and describe in more detail our main con-
tribution in Section III. Furthermore, we will explain
the procedures performed, and the experiments con-
ducted in this work in Section IV. At the end, we will
show the main conclusions of the project and indicate
some recommendations for future work in Section V.
2 RELATED WORKS
The topic of pothole and damage segmentation has
been around for several years now. In recent years
many methods and techniques have been proposed
with the goal of getting the best results. Those articles
differ greatly in terms of the objective and final prod-
uct. The following articles demonstrate studies and
development of Deep Learning models of interest for
our project. Some even mention a model integration
with an application, which is relevant as well. That
being said we will discuss the insights they provide,
the limitations and the differences in comparison to
our intentions.
In (Park et al., 2021) the authors perform a study
comparing the performance of various YOLO mod-
els versions under multiple metrics as precision, recall
and mAP. The ultimate goal being to find the optimum
YOLO algorithm for pothole detection in real time.
Results showed that the YOLOv4-tiny was the best
for pothole detection. However, we also will evaluate
other real time models such as SSD and MobileNet.
Moreover, we seek to produce a model which is re-
trained for Peruvian roads. Instead in (Park et al.,
2021) the dataset is mostly web-scraped from Google,
meaning the model isn’t trained for a specific context
and results could vary greatly depending on the origin
of the image.
In (Rateke and von Wangenheim, 2021) the au-
thors propose a model based on ResNet pre-trained
in ImageNet that segmentates and differentiates the
types of damage between speed-bump, crack and pot-
hole. A transfer learning process was carried out
on two models with different hyper-parameters. The
model with the best configuration was called r34-
DW, has an accuracy of 90% in eleven out of thirteen
classes. However due to the high number of labels,
two classes have a low accuracy (below 72%). In con-
trast, we aim to use more general labels, since having
various highly specific labels hinders the model per-
formance.
In (Moscoso Thompson et al., 2022) the authors
developed 6 models for evaluation on the SHREC
2022 track, which were compared to the Baseline-
DeepLav3 model. The models were trained to per-
form semantic segmentation on the road surface, de-
tecting potholes and cracks. From the proposed mod-
els the HCMUS-CPS-DLU-Net model had the best
overall results, however these models aren’t able to
differentiate between different types and severity of
the damage. As we seek to provide a more detailed
report of the road damages, it is important to be able
to identify the type and/or severity of the damage.
In (Dong et al., 2021) the authors propose a mo-
bile damage segmentation model, which is developed
to detect multiple damages in the same image, using
an optimizer called DIoU-NMS. The model that per-
forms the segmentation uses a reference object, this
object allows the model to estimate the area, width,
height and ratio of the damage. Even though this
method has an accuracy of 93.4%, for our purposes,
it is not convenient to carry a reference object and de-
pend on having a clear shot with it to use the model.
In our proposal, an accurate detection of the type and
severity of the damage is of higher priority than the
estimate of its dimensions.
In (Patra et al., 2021) a system called PotSpot was
implemented. Through an Android Application, a
CNN model and a Maps API (Application Program-
ming Interface), are integrated to be able to perform
the pothole detection and mapping. The damage de-
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
740

tection is performed exclusively on potholes, more-
over pothole detection is binary, pothole or no pot-
hole, simplifying the training of the model. That be-
ing said despite this project providing an end-to-end
result, it lacks the level of detail we aim to achieve.
The end result fails to show the user the characteris-
tics of the damage (e.g. type, severity, image of the
damage, etc).
3 REAL-TIME POTHOLE
DETECTION WITH MOBILE
DEVICES
3.1 Preliminary Concepts
In this section, the main concepts used in our work are
presented. We aim to train a real-time object detection
model, via Computer Vision methods and a Bounding
Box labeled dataset to be able to identify objects of
interest within our training images.
Definition 1 (Computer Vision(Baek and Chung,
2020)): Computer vision is a technology that ex-
tracts useful information by inputting visual data into
a computer and analyzing it. The goal of computer
vision is to extract interesting information from pat-
tern recognition, statistical learning, and projection
geometry through object detection, segmentation, and
recognition in images.
Definition 1 (Convolutional Neural Network (Baek
and Chung, 2020)). CNN aims to reduce the complex-
ity of the model and extract significant features by ap-
plying a convolution operation. In visual data, object
detection is a technique to find a candidate region for
a detection target to recognize a specific target and to
predict the type and location of the object (bounding
box).
Definition 2 (Vision-based Pothole Detection (Kim
et al., 2022)). A vision-based method uses images
or videos as input data and determines the presence
of potholes on the road surface by applying image-
processing and deep-learning technology. ...suitable
for determining the number and approximate shape of
potholes.
Example 1 (Vision-based Pothole Detection). Is
shown in Figure 1.
Definition 3 (Global Positioning System (Wu et al.,
2020)). GPS, which is used to record location. As
mentioned in (Pandey et al., 2022) and (Egaji et al.,
2021), location data means latitude and longitude co-
ordinate information.
Figure 1: Example of vision-based Pothole Detection via
Bounding Box labeling in (Park et al., 2021).
Example 2 (Global Positioning System). Is shown in
Figure 2.
Figure 2: Example of GPS data usage for pothole mapping
in (Patra et al., 2021).
3.2 Method
In this section, the main contributions proposed in this
project will be detailed.
3.2.1 Peruvian Road Damage Dataset
The first contribution of this work is the creation of
a dataset containing information of potholes on the
roads of Lima, Peru. This is due to the fact that,
currently, there is no publicly available road damage
dataset of Peru. The dataset without augmentation has
618 images and three labels (Cracks, Pothole and Se-
vere Pothole), the labels for the potholes were chosen
as follows: the most critical potholes were labeled as
Severe while medium sized and small potholes were
labeled as Pothole.
Deepbrokenhighways: Road Damage Recognition System Using Convolutional Neural Networks
741
3.2.2 Real-Time Pothole Severity and Crack
Detection Model
The second contribution of this work is the implemen-
tation of a model for real-time detection of pothole
severity. We will use the pre-trained Yolov4 model,
this model will be trained further using our data aug-
mented Peruvian Road Damage Dataset (Figure 4).
The architecture of the Yolov5 model is composed of
3 fundamental parts; the first is the Backbone, where
Darknet or CSPDarknet53 is generally used to ex-
tract features in different dimensions from the input.
The second is the Neck, where FPN or SPP modules
are generally used to fuse the features extracted from
the backbone at different scales (sizes) and finally the
Head, which is responsible for performing detection
at multiple scales (sizes).
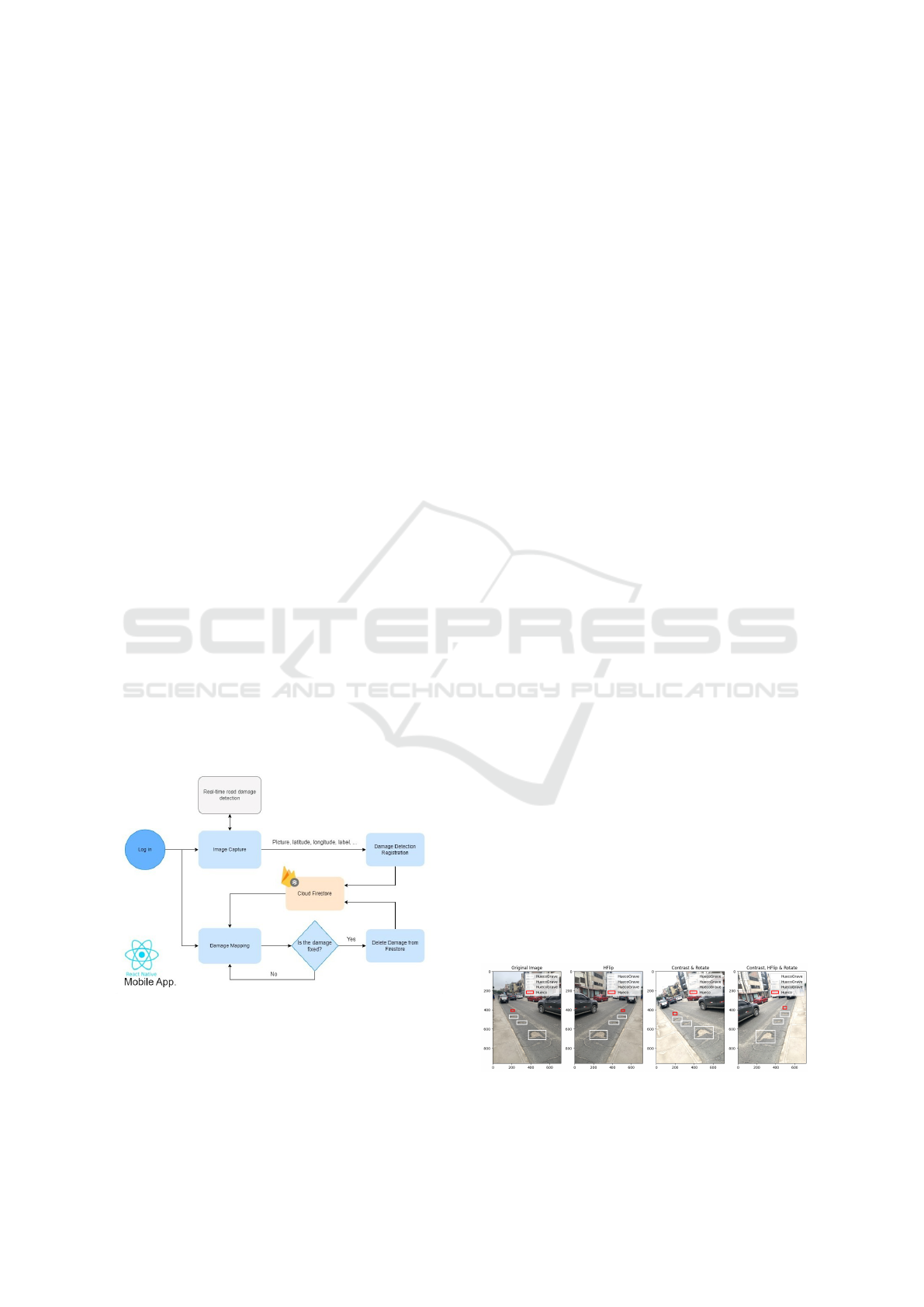
3.2.3 Road Damage Detection and Mapping
System
The third contribution of this work is a mobile appli-
cation Fig. 3, developed with the React Native frame-
work, with road damage detecting and mapping func-
tionalities. Using the model we developed, damage in
roads will be detected in real-time through a smart-
phone’s camera. As damage is detected the user will
be capable of taking a picture of the detection and
choose to register (upload) the damage to a Cloud
Firestore Database. The damage registration data in-
cludes: the picture, latitude and longitude of where
the picture was taken and the detected label. Once
damage is detected and registered, users will be able
to see damage detected throughout the city through a
map implemented into the application.
Figure 3: System Flow Diagram.
4 EXPERIMENTS
In this section, we will discuss the experiments that
were performed for our project. Detailing the con-
figuration and resources needed to replicate said ex-
periments. Moreover, the results produced by these
experiments will also be discussed and interpreted.
4.1 Experimental Protocol
In this section, the details about the configuration, re-
quired resources and applications used to perform the
experiments. The experiments were developed on the
Google Colaboratory Platform with a GPU Runtime.
This includes a Intel(R) Xeon(R) CPU @ 2.30GHz
The GPU we utilised for our experiments was a Tesla
T4, alongside 12 GB of RAM. Our code was devel-
oped on Python 3.9.16. Data augmentation related
work relies mainly on the Albumentations library.
For the implementation of the Yolo models, we
used the Ultralytics open-source project that fa-
cilitates the training of Yolo models. It can be
found at https://github.com/ultralytics/yolov5. Some
of the libraries required for these experiments in-
clude opencv-python>=4.1.1, Pillow>=7.1.2 and
torch>=1.7.0 as well as others detailed on the re-
quirements file of the ultralytics repository.
For the MobileNet v2 model, we’ll use the
TF2Lite Model Detection API. For this experiment
packages required for the Model Detection API as
well as the tensorflow=2.8.0 library are required.
The experiments consist of training the two mod-
els just mentioned with our Peruvian Road Dam-
age Dataset alongside images from widely used Road
Damage Dataset 2020 (RDD20). Moreover, to test
the viability of crack detection using a Bounding Box
method each model will be trained twice, with and
without including the crack damage annotations. The
Dataset used for these experiments contains 325 im-
ages from Peru and 293 from the RDD20 (Arya et al.,
2021), which includes images from India and Japan.
After Data Augmentation, which involves 3 different
types of transformations, the final dataset for exper-
imenting has 4994 images. A example of the per-
formed transformations is shown in (Figure 4).
Figure 4: Data Augmentation performed on Dataset (Hueco
= Pothole; HuecoGrave = SeverePothole).
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
742

4.2 Results
In this subsection the experiments carried out and the
corresponding results obtained in each one will be de-
tailed and discussed.
4.2.1 YOLOv5
Training with YOLOv5 for the dataset without crack
annotations lasted about 4 hours with 21 minutes,
training a total of 350 epochs. On the other hand,
training with crack annotations lasted 4 hours with 31
minutes, training a total of 350 few. The training was
performed with the pre-trained Yolov5s weights and
with a batch size of 16 for both the datasets, with
crack annotations (see Figure 5a) and without crack
annotations (see Figure 5b).
Although good results were obtained, the train-
ing could not be more extensive due to the limited
resources used, being a maximum of 350 epochs as
previously mentioned. However, the loss obtained in
the last epochs of the training is minimal. This means
that the model is highly optimized and training be-
yond this point would not cause a drastic change in
results.
4.2.2 YOLOv8
Training with YOLOv8 for the dataset without crack
annotations lasted about 4 hours with 45 minutes,
training a total of 220 epochs. On the other hand,
training with crack annotations lasted 2 hours with 25
minutes, training a total of 110 epochs. The training
was performed with the pre-trained Yolov8n weights
and with a batch size of 16 for both the datasets, with
crack annotations and without crack annotations.
Due to the limited GPU resources the Google Co-
lab platform offers, it was not possible to perform a
more exhaustive training; however, when observing
Fig. 6a and Fig. 6b, it is evident that as more training
epochs are added, the loss will continue to decrease.
It is worth noting that the epochs in YOLOv8 train-
ing are fewer, this is due to YOLOv8 having higher
computational resource requirement than YOLOv5.
4.2.3 SSD MobileNet V2
The training for this model with the dataset with
both datasets lasted 35000 epochs for approximately
4 hours. When performing detection on test im-
ages the minimum confidence was set at 0.15%, with
the purpose of filtering very low quality, inaccurate
and redundant overlapping detections. Moreover,
the observed total loss during training had a con-
stant downward tendency, however the MobileNetV2
model trained with no crack annotations still showed
pronounced signs of a decrease in loss as shown
in Fig. 7a. That being said there’s a potential im-
provement to be reached if trained for even longer
(more epochs). Meanwhile the MobileNetV2 trained
with cracks annotations showed signs of stabilizing as
shown in Fig. 7b.
4.3 Discussion
In this subsection, the results obtained in the previous
section are detailed and discussed.
Models trained without crack annotations, mani-
fest excellent pothole detection capabilities as shown
in Table 1. The three models included in the experi-
ments show a pattern, which is a higher Average Pre-
cision for the Severe Pothole class than the Pothole
class. This is due to severe potholes, being a more
critical damage, it possess more notorious character-
istics and therefore is more distinguishable. On the
other hand, our ”regular” pothole class, which con-
tains smaller and less dangerous potholes, being a less
significant damage in the road it involves a higher dif-
ficulty of detection. That being said, within the batch
of models trained without crack annotations, YoloV5
stands out as the best. As it has the top mean average
precision (mAP50), that being 99.0%.
On the side of the models trained with crack an-
notations, present an average precision over 90% in
all classes as shown in Tab. 1. The only exception
to this is the MobileNetV2, which shows a consid-
erable amount of drop off in average precision for
the pothole class in comparison to its counterpart
trained with no crack annotations. This is caused due
to having more classes to predict makes the model
more likely to confuse one for another. Especially
when the class objects are similar in appearance as
it is the case here. Another thing to consider is that
road cracks come in various shapes and types, which
also has an impact on the pothole detection. YoloV5
is again identified as the best model as it obtained
the best metrics in comparison to Yolov8 and Mo-
bileNetV2. Also, the deficiencies observed from the
MobileNetV2 model don’t apply. YoloV5 provides a
excellent average precision that is 99.3% for potholes
and severe potholes. While also having a 96.2% av-
erage precision for cracks. An acceptable drop off in
average precision, in comparison to the other classes,
considering how irregular and varied the appearance
of road cracks can be, making it the toughest class to
label and detect.
Lastly, through these experiments we have found
that crack detection via a Bounding Box method to be
viable. This being due to the competent average pre-
Deepbrokenhighways: Road Damage Recognition System Using Convolutional Neural Networks
743
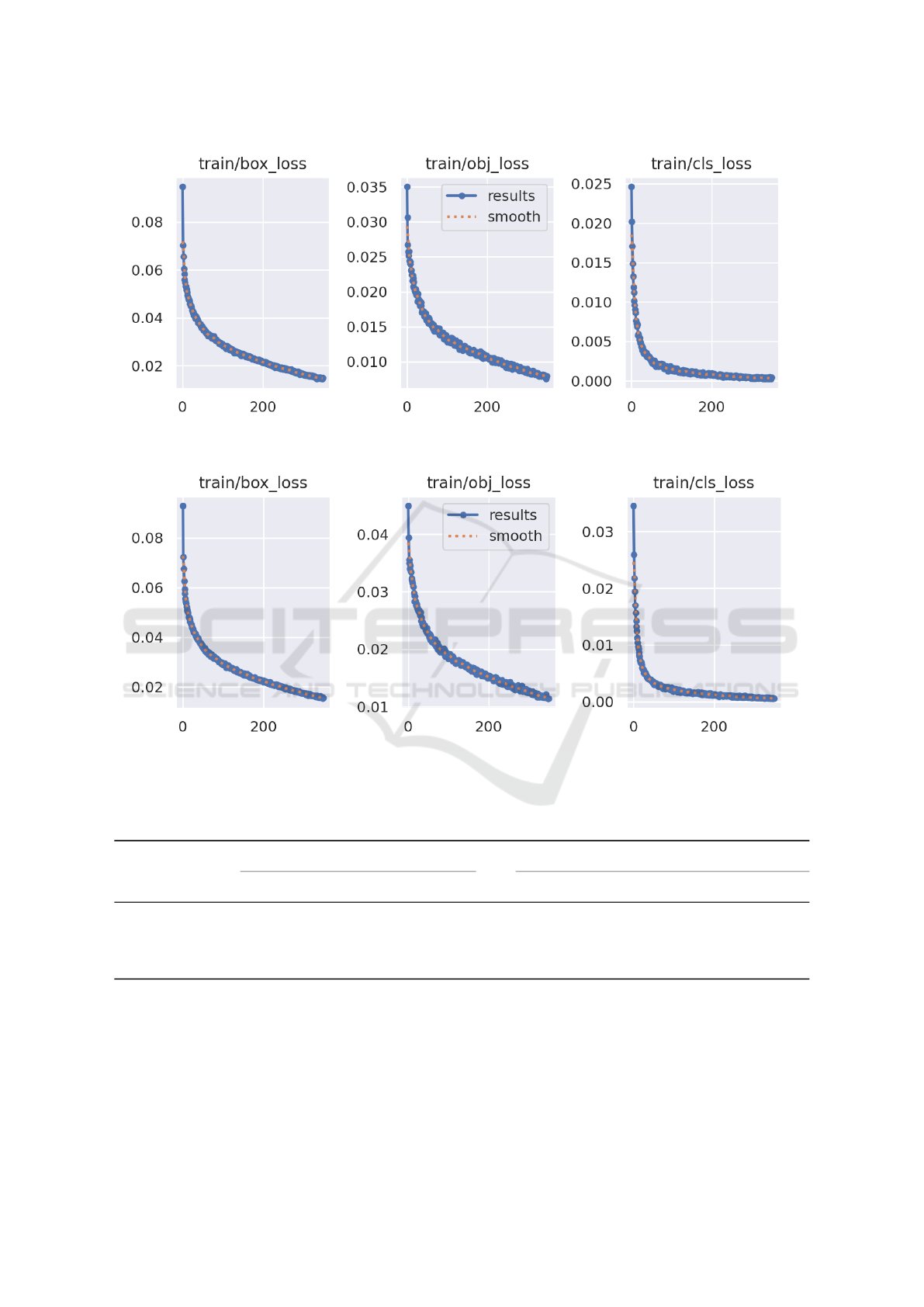
(a) YOLOv5 training loss without crack annots.
(b) YOLOv5 training loss with crack annots.
Figure 5: Comparison of YOLOv5 training (a) without crack annots and (b) with crack annots.
Table 1: Av. Precision at 0.5 IoU.
without crack damage annots with crack damage annots
Model Pothole SeverePothole mAP50 Pothole SeverePothole Crack mAP50
SSD MobileNetV2 89.6% 95.3% 92.5% 83.2% 92.2% 90.8% 88.7%
YoloV5 98.6% 99.5% 99.0% 99.3% 99.3% 96.2% 98.3%
YoloV8 98.0% 99.2% 98.6% 94.2% 98.9% 94.4% 95.8%
cision obtained of 96.2% for cracks with the YoloV5
model, alongside 99.3% average precision for pothole
classes. Taking that into consideration, the model se-
lected for implementing into the mobile application
will be a YoloV5 model trained with crack annota-
tions. It presents the best performance from our set of
experiments, having a minimal decrement in mAP50
in comparison to the ”crack-less” YoloV5 model as it
involves a wider range of labels to detect.
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
744
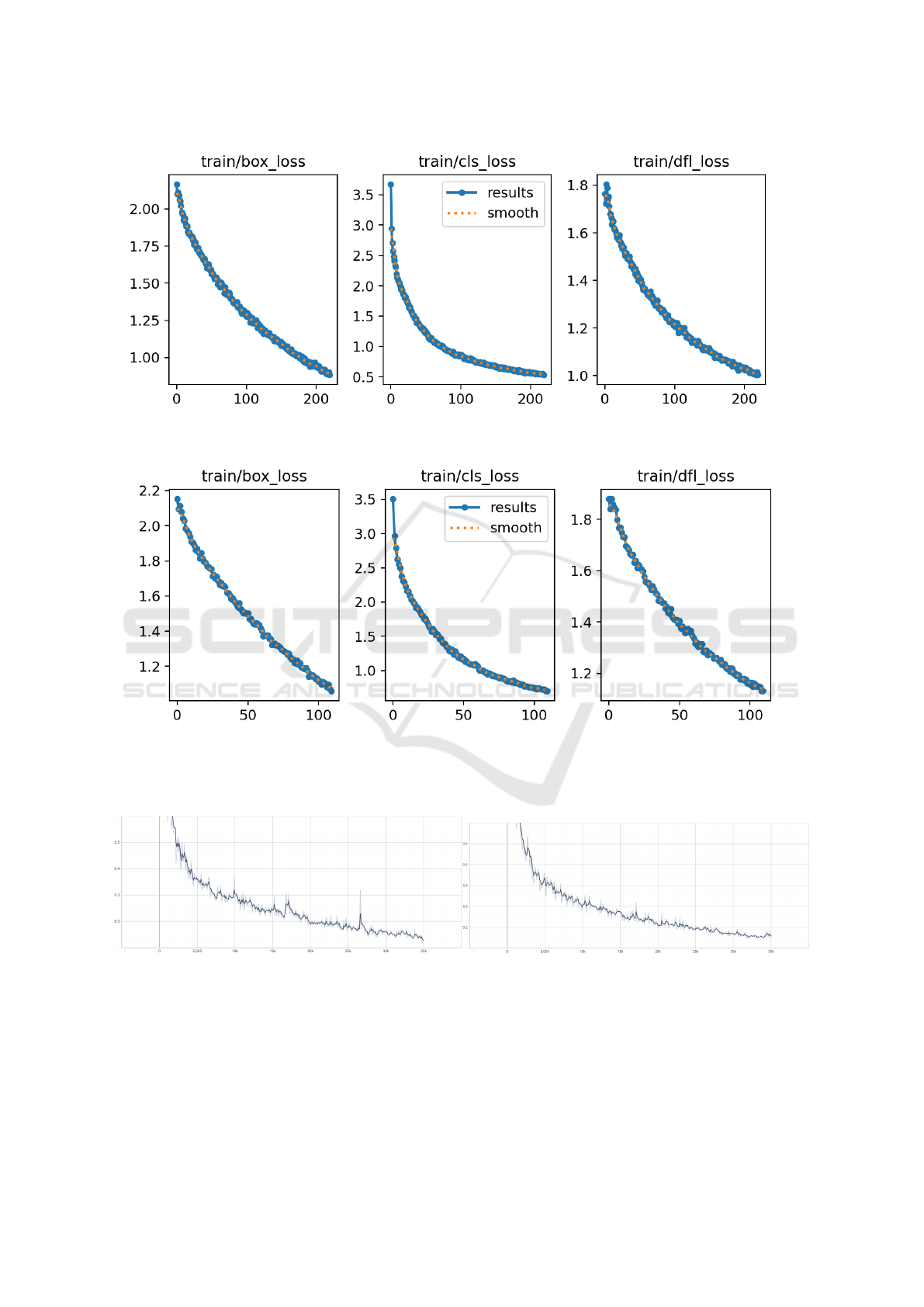
(a) YOLOv8 training loss without crack annots.
(b) YOLOv8 training loss with crack annots.
Figure 6: Comparison of YOLOv8 training loss (a) without crack annots and (b) with crack annots.
(a) Without crack annots. (b) With crack annots.
Figure 7: Comparison of MobileNetV2 training total loss (a) without crack annots and (b) with crack annots.
5 CONCLUSIONS
In this paper, a system for detection and monitoring
of road damages is devised. The scope for this pa-
per includes the experimentation and selection of the
model which is most capable for road damage detec-
tion. Moreover, road crack detection has been proven
to be viable as the tested models got an average pre-
Deepbrokenhighways: Road Damage Recognition System Using Convolutional Neural Networks
745

cision above 90% for that specific label. That being
said we have found YOLOv5 to be the best model for
road damage detection in Peru. As it reports the best
mAP50 across both experiments 99.0% and 98.3%,
with and without cracks correspondingly. As we have
found crack detection to be viable a YoloV5 model
trained with crack annotations will be the one chosen
for our mobile application.
Due to the lack of data availability corresponding
to our context which is Lima, Peru; pushed us into
forming our own novel dataset. That being said, time
was also a constraint allowing us to elaborate our ex-
periments with 618 photos (325 from Peru and 293
from RDD20(Arya et al., 2021)), thus a data aug-
mentation phase was required in order to be able to
train a robust model with plenty of data. This pro-
cess allowed us to train our models with 2497 images,
in contrast to our original 618 images. Our results
demonstrated the effectiveness and usefulness of data
augmentation for road damage detection.
As future work, we would like to be able to use
drone or satellite imaging in order to further opti-
mize and speed up the road damage detection process.
While also testing its practicality as Peru’s roads are
highly transited, it poses the question if cars would be
a major obstacle to the visibility of potholes similarly
to other topics (Rodr
´
ıguez et al., 2021; Fernandez-
Ramos et al., 2021; Alfaro-Paredes et al., 2021).
REFERENCES
Alfaro-Paredes, E., Alfaro-Carrasco, L., and Ugarte, W.
(2021). Query by humming for song identification us-
ing voice isolation. In IEA/AIE (2), volume 12799 of
Lecture Notes in Computer Science, pages 323–334.
Springer.
Aparna, Bhatia, Y., Rai, R., Gupta, V., Aggarwal, N., and
Akula, A. (2022). Convolutional neural networks
based potholes detection using thermal imaging. J.
King Saud Univ. Comput. Inf. Sci., 34(3):578–588.
Arya, D., Maeda, H., Ghosh, S. K., Toshniwal, D., and
Sekimoto, Y. (2021). Rdd2020: An annotated im-
age dataset for automatic road damage detection using
deep learning. Data in Brief, 36:107133.
Baek, J.-W. and Chung, K. (2020). Pothole classification
model using edge detection in road image. Applied
Sciences, 10:6662.
Dong, J., Li, Z., Wang, Z., Wang, N., Guo, W., Ma, D.,
Hu, H., and Zhong, S. (2021). Pixel-level intelli-
gent segmentation and measurement method for pave-
ment multiple damages based on mobile deep learn-
ing. IEEE Access, 9:143860–143876.
Dong, J., Wang, N., Fang, H., Wu, R., Zheng, C., Ma, D.,
and Hu, H. (2022). Automatic damage segmentation
in pavement videos by fusing similar feature extrac-
tion siamese network (sfe-snet) and pavement damage
segmentation capsule network (pds-capsnet). Automa-
tion in Construction, 143:104537.
D
´
avila Estrada, H. A. (2022). Propuesta de un concreto para
pavimentos r
´
ıgidos con adici
´
on de polvo de vidrio
en reemplazo parcial del cemento y agregado fino,
af
´
ın de reducir la contaminaci
´
on producida por la
construcci
´
on de la capa de rodadura en la carretera
mayocc-huanta, tramo allccomachay-huanta departa-
mento de ayacucho.
Egaji, O. A., Evans, G., Griffiths, M. G., and Islas, G.
(2021). Real-time machine learning-based approach
for pothole detection. Expert Syst. Appl., 184:115562.
Fernandez-Ramos, O., Johnson-Ya
˜
nez, D., and Ugarte, W.
(2021). Reproducing arm movements based on pose
estimation with robot programming by demonstration.
In ICTAI, pages 294–298. IEEE.
Kim, Y.-M., Kim, Y.-G., Son, S.-Y., Lim, S.-Y., Choi, B.-Y.,
and Choi, D.-H. (2022). Review of recent automated
pothole-detection methods. Applied Sciences, 12(11).
Ministerio de Transportes y Comunicaciones (2015). Re-
sumen ejecutivo del inventario basico de la red vial
departamental o regional.
Moscoso Thompson, E., Ranieri, A., Biasotti, S., Chic-
chon, M., Sipiran, I., Pham, M.-K., Nguyen-Ho, T.-L.,
Nguyen, H.-D., and Tran, M.-T. (2022). Shrec 2022:
Pothole and crack detection in the road pavement us-
ing images and rgb-d data. Computers & Graphics,
107:161–171.
Pandey, A. K., Iqbal, R., Maniak, T., Karyotis, C., Akuma,
S., and Palade, V. (2022). Convolution neural net-
works for pothole detection of critical road infras-
tructure. Computers and Electrical Engineering,
99:107725.
Park, S.-S., Tran, V.-T., and Lee, D.-E. (2021). Applica-
tion of various yolo models for computer vision-based
real-time pothole detection. Applied Sciences, 11(23).
Patra, S., Middya, A. I., and Roy, S. (2021). Potspot: Partic-
ipatory sensing based monitoring system for pothole
detection using deep learning. Multim. Tools Appl.,
80(16):25171–25195.
Rateke, T. and von Wangenheim, A. (2021). Road surface
detection and differentiation considering surface dam-
ages. Auton. Robots, 45(2):299–312.
Rodr
´
ıguez, M., Pastor, F., and Ugarte, W. (2021). Classi-
fication of fruit ripeness grades using a convolutional
neural network and data augmentation. In FRUCT,
pages 374–380. IEEE.
Tenorio Construcciones y Soluciones (2022). Manten-
imiento en v
´
ıas.
Wu, C., Wang, Z., Hu, S., Lepine, J., Na, X., Ainalis,
D., and Stettler, M. (2020). An automated machine-
learning approach for road pothole detection using
smartphone sensor data. Sensors, 20(19).
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
746
