
Swarm Intelligence Path-Planning Pipeline and Algorithms for UAVs:
Simulation, Analysis and Recommendation
Wyatt Harris
1
, Sean Tseng
1
, Tabatha Viso
1
, Max Weissman
1
and Chun-Kit Ngan
2
1
Department of Robotics Engineering, Worcester Polytechnic Institute, 100 Institute Rd., Worcester, MA, U.S.A.
2
Data Science Program, Worcester Polytechnic Institute, 100 Institute Rd., Worcester, MA, U.S.A.
Keywords:
Artificial Intelligence, Artificial Potential Field, Bio-Inspired Optimization, Heuristic Search, Hybrid
Optimization Methods, Path Planning, Policy Gradient, Swarm Robotics, State-of-the-Art, UAV.
Abstract:
This research work aims to support domain experts in the selection of proper path planning algorithms for
UAVs to solve a domain business problem (i.e., the last mile delivery of goods). In-depth analysis, insight,
and recommendations of three promising approaches, including reinforcement learning-based, bio-inspired-
based, and physics-based are used to address the multi-agent UAV path planning problem. Specifically, the
contributions of this work are fourfold: First, we develop a unified pipeline to implement each approach to
conduct this analysis. Second, we build a 2D UAV path planning environment to simulate each approach.
Third, using this 2D environment, we run the 450 simulations in three different group sizes of swarm UAV
agents (i.e., 3, 5, and 10) within three environments of varying complexity (i.e., Easy, Intermediate, and Hard).
We aggregate the simulation data and compare their performance in terms of success rate, run-time, and path
length while using the classical A* Search as a baseline. Finally, based upon the performance of each approach
and our analytical investigations, we provide informed recommendations for the optimal use case of each UAV
path planning approach. The recommendations are presented using parameters for environmental complexity
and urgency of goods delivery.
1 INTRODUCTION
Swarm robotics is a field that describes groups of in-
dividual agents that can act in a decentralized manner
through local decision making processes.
Initially, the field of swarm robotics started as a
section of research focused on robot communications.
Now the field has grown to house a variety of inter-
disciplinary applications and domains for both com-
mercial and military sectors (Theraulaz et al., 2021).
One of the main advantages of using swarm robotics
over individual robotic agents is that swarm robotics
may leverage smaller and cheaper robots to accom-
plish tasks as effectively, or in some cases, more ef-
fectively than individual agents. This is especially
clear in large environments with high time-cost ac-
tions such as search and rescue, path planning to tar-
gets, warehouse routines, and military engagements
(Tan and Zheng, 2013) (Zhen et al., 2020).
Unmanned Aerial Vehicles (UAVs) as members of
robotic swarms have gained popularity in recent years
as possible tools for last mile delivery of goods. Last
mile delivery, or final mile delivery, is the movement
of goods from a warehouse to a customer’s house or
designated package area (DHL, 2023). This interest
stems from companies seeking solutions to higher de-
livery volumes, aging workforce, and on-time deliv-
ery. Several companies such as Alibaba, Alphabet,
Amazon, DHL, UPS and even Domino’s have experi-
mented with UAV delivery of groceries, medical sup-
plies and mail (Li and Kunze, 2023).
Amazon has developed a UAV targeting a 60
minute delivery time once a customer orders a med-
ication as a part of Amazon Pharmacy’s delivery op-
tions. The company is also increasing the range of
these drones from 5 km to 15 km, reducing the build
cost from $ 146,000 to $60,000 and increasing the
number of goods available to be shipped via UAVs
(Staff, 2023) (Kim and Long, 2022). Another notable
commercial use case of UAVs is the company Zipline
which effectively delivers important medical supplies
across remote and inaccessible regions in Ghana (Li
and Kunze, 2023).
However, operational research analyzing the cost
per shipment and cost per payload unit between un-
manned ground drones against UAVs found that the
factors “operator costs per hour” and “average beeline
service radius” in combination with “average cruis-
ing speed” were the most crucial cost driver variables
of delivery. The authors noted that in order to drive
Harris, W., Tseng, S., Viso, T., Weissman, M. and Ngan, C.
Swarm Intelligence Path-Planning Pipeline and Algorithms for UAVs: Simulation, Analysis and Recommendation.
DOI: 10.5220/0012686000003690
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 26th International Conference on Enterprise Information Systems (ICEIS 2024) - Volume 1, pages 747-758
ISBN: 978-989-758-692-7; ISSN: 2184-4992
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
747

down costs and make UAV’s competitive with regular
ground vans, the number of drones per human opera-
tor must increase (Li and Kunze, 2023).
The demand for UAVs is increasing, as noted in
a Statista report, 630,000 units were shipped in 2020
with an expectation of a four-fold increase in 2025
to 2.6 million units (Tractica, 2019). Peak demand
is heavily influenced by military and defense spend-
ing, with an expectation of the UAV market growing
from $25 billion in 2018 to nearly $70 billion in 2029
(BIS, 2019). This demonstrates that interest in UAVs
is only growing. In order to make UAV drones more
viable, larger groups of drones must be leveraged to
drive down costs, increase reliability and ultimately
be more effective than traditional vans. Swarm UAVs
leverages the growing global interest in UAV drones
and can potentially provide more effective last mile
delivery.
Multi-agent path planning for UAV drones last
mile delivery of goods encompasses three distinct cat-
egories of approaches, each offering unique perspec-
tives and methodologies. In reinforcement learning
(RL), artificial intelligence principles enable agents,
such as UAVs, to dynamically learn optimal paths
through trial and error, adapting their decision-
making over time based on feedback. Alternatively,
bio-inspired algorithms draw inspiration from nature,
replicating the decentralized and collaborative behav-
iors observed in social insects or flocking birds. These
approaches excel in promoting adaptability and re-
silience within the swarm. Lastly, physics-based al-
gorithms ground themselves in principles of physics
and motion, modeling interactions and constraints
among agents and their environment. By consider-
ing factors such as collision avoidance and potential
fields, physics-based algorithms provide a foundation
for realistic and reliable path planning, particularly
in scenarios where precise control and adherence to
physical constraints are crucial. Together, these cat-
egories contribute diverse tools to address the chal-
lenges posed by complex and dynamic environments
in swarm multi-agent systems.
The reinforcement learning based algorithm stud-
ied in this work is the Multi-Agent Deterministic Pol-
icy Gradient (MADPG) for UAV path planning (Zhu
et al., 2023). The algorithm is a lighter version of
the Multi-Agent Deep Deterministic Policy Gradi-
ent (MADDPG) without neural networks to facilitate
faster computation speeds. UAV agents will choose
an action based on its value and then receive a reward
at the next state depending on the performance rela-
tive to the goal position. There is an actor and critic
system that updates the parameters of all agents based
on the swarm’s progress (Huang et al., 2020). In the
case of last mile deliveries, the algorithm can be used
for organizing a swarm of drones from different ware-
houses to converge to a customer’s home which pre-
vents the need for consecutive transport of goods from
warehouse to another. This method excels at finding
optimal policies to maximize rewards in dynamic en-
vironments (Wu et al., 2020b). One of the weaknesses
of reinforcement learning algorithms is that they seek
to find a balance between exploration and exploitation
of the environment. Too much exploration can lead to
inefficiencies, and a fixation on exploitation may yield
a non-optimal solution (Xue et al., 2023).
The bio-inspired approach studied in this work
is the promising Hybrid Simplified Grey Wolf Opti-
mization with Modified Symbiotic Organism Search
(HSGWO-MSOS) algorithm, which combines the
strengths of two relatively novel bio-inspired op-
timization algorithms proposed in 2014: Grey
Wolf Optimization (GWO) and Symbiotic Organisms
Search (SOS). Although this SOTA method was only
proposed for single-agent UAV path planning, it of-
fers great potential for multi-agent optimization, since
many comparable SOTA methods have successfully
utilized GWO for similar applications (Xu et al.,
2020). This algorithm is successful because it utilizes
the hierarchical structure of GWO to balance explo-
ration and exploitation, while also promoting coop-
eration and enabling effective local searches through
the commensal exploration method from SOS. By
combining these approaches, the proposed HSGWO-
MSOS has been shown to outperform classical al-
gorithms in UAV path planning, delivering efficient
global searches and effective local refinement (Qu
et al., 2020). In the context of last mile delivery, this
approach would function efficiently by continuously
identifying the most optimal route taken by a UAV
in a group of delivery agents, leveraging this path
to guide all agents, and simultaneously permitting
exploration of nearby alternative routes by remain-
ing agents. However, HSGWO-MSOS may strug-
gle with potential slow convergence and scalability is-
sues, which means it may not always find the most op-
timal delivery routes or may not be well suited for op-
timizing a large number of delivery agents at a time.
Finally, a successful physics-based approach is
Improved Artificial Potential Field (APF) method,
which incorporates multiples advancements over the
traditional APF method. The algorithm incorporates
attractive and repulsive fields between UAV agents to
maintain an ideal distance for effective path planning.
APF is a widely-used algorithm for collision avoid-
ance in robotics path planning (Wu et al., 2020a). It
divides the environment into attractive and repulsive
forces, with goals exerting attractive forces and obsta-
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
748

cles exerting repulsive forces on the UAV. By calcu-
lating these forces and taking their vector sum, the
direction of the UAV is determined. The simplic-
ity and efficiency of APF, along with its ability to
generate smooth trajectories, have made it a popular
choice in various applications, especially in dynamic
environments such as UAV delivery services for last
mile deliveries. Variations of the base APF algorithm
and similar physics-based approaches have been pro-
posed in the UAV delivery and UAV search and res-
cue domains (Zhao et al., 2020). The base APF al-
gorithm has limitations, such as convergence to local
minima and a jitter problem. The SOTA Improved
APF method overcomes many, but not all, of these
limitations, making it suitable for multi-UAV systems
where global optima and swarm compactness are cru-
cial (Zhang et al., 2022). While the Improved APF
algorithm has shown promising results in simulation
experiments, providing effective collision avoidance
and real-time performance, it still needs to maintain a
trade-off between speed and performance, and require
rigorous tuning of various parameters.
In this paper, we focus on swarm robotics and
its application to multi-agent path planning for UAVs
in unfamiliar environments and unknown static ob-
stacles. This work aims to support domain ex-
perts in the selection of proper path planning algo-
rithms for UAVs to solve a domain business prob-
lem (i.e., the last mile delivery of goods). In-
depth analysis, insight, and recommendations of
three promising approaches, including reinforcement
learning-based (i.e., Multi-Agent Deterministic Pol-
icy Gradient (MADPG)), bio-inspired-based (i.e., Hy-
brid Simplified Grey Wolf Optimization with Modi-
fied Symbiotic Organism Search (HSGWO-MSOS)),
and physics-based (i.e., Improved Artificial Potential
Field (APF)) are used to address the multi-agent UAV
path planning problem. Specifically, the contributions
of this work are fourfold: First, we develop a unified
pipeline to implement each approach to conduct this
analysis. Second, we build a 2D UAV path planning
environment to simulate each approach. Third, using
this 2D environment, we run the 450 simulations in
three different group sizes of swarm UAV agents (i.e.,
3, 5, and 10) within three environments of varying
complexity (i.e., Easy, Intermediate, and Hard). We
aggregate the simulation data and compare their per-
formance in terms of success rate, run-time, and path
length while using the classical A* Search as a base-
line. Finally, based upon the performance of each ap-
proach and our analytical investigations, we provide
informed recommendations for the optimal use case
of each UAV path planning approach. The recom-
mendations are presented using parameters for envi-
ronmental complexity and urgency of goods delivery.
The remainder of the paper is organized as fol-
lows: Section 2 describes the development of the sim-
ulation environment and data flow. Section 3 explains
the pipeline for implementing each approach, outlin-
ing the overall methodology, pseudo-code, and an ex-
ample. Section 4 details the experimental analysis
of all approaches within the bounds of our simula-
tion environment. Results of these simulations as well
as situational recommendations are included. Finally,
the results are summarized and future work is outlined
in Section 5.
2 SIMULATION ENVIRONMENT
To implement the three SOTA algorithms as well as
the baseline A* Search algorithm, a simulation en-
vironment was developed. Pygame, an open source
Python library typically used for multimedia applica-
tions, was leveraged to design the control environ-
ment. The pygame backbone allows for real-time
simulations of all methodologies included in this body
of work (Shinners, 2011).
The simulation environment was abstracted to
three main objects:
1. Agents
2. Obstacles
3. Goal State
Agents, which represent UAVs, are defined with
a preset radius, identification number, (x,y) tuple for
real time position, and more. Additional parameters
are included for tracking agent position over time.
Obstacles are static circles defined with a (x,y) tu-
ple as well as radius. Their cylindrical shape ide-
ally represent avoidance areas around trees, poles and
tall buildings which UAVs commonly encounter and
need to avoid. Trees come in a variety of shapes and
widths, and the obstacle class can effectively repre-
sent that variance with custom sizes and overlap. The
goal state is a simple point with a static (x,y) tuple for
position. The superposition of these elements creates
unique simulation environments for implementation
of any path planning algorithm.
As shown in Figure 1, at simulation start, the user
is prompted to input the chosen algorithm, number of
agents in the swarm, and the environment difficulty.
This defines the problem. The start and end/goal po-
sitions of the agents are randomly selected. Then, the
inputs are used in the define algorithm, swarm size
and environment stage. The objects for all agents are
created along with instances of the three algorithms.
Then swarm sizes of 3, 5, and 10 are created. Pygame
Swarm Intelligence Path-Planning Pipeline and Algorithms for UAVs: Simulation, Analysis and Recommendation
749
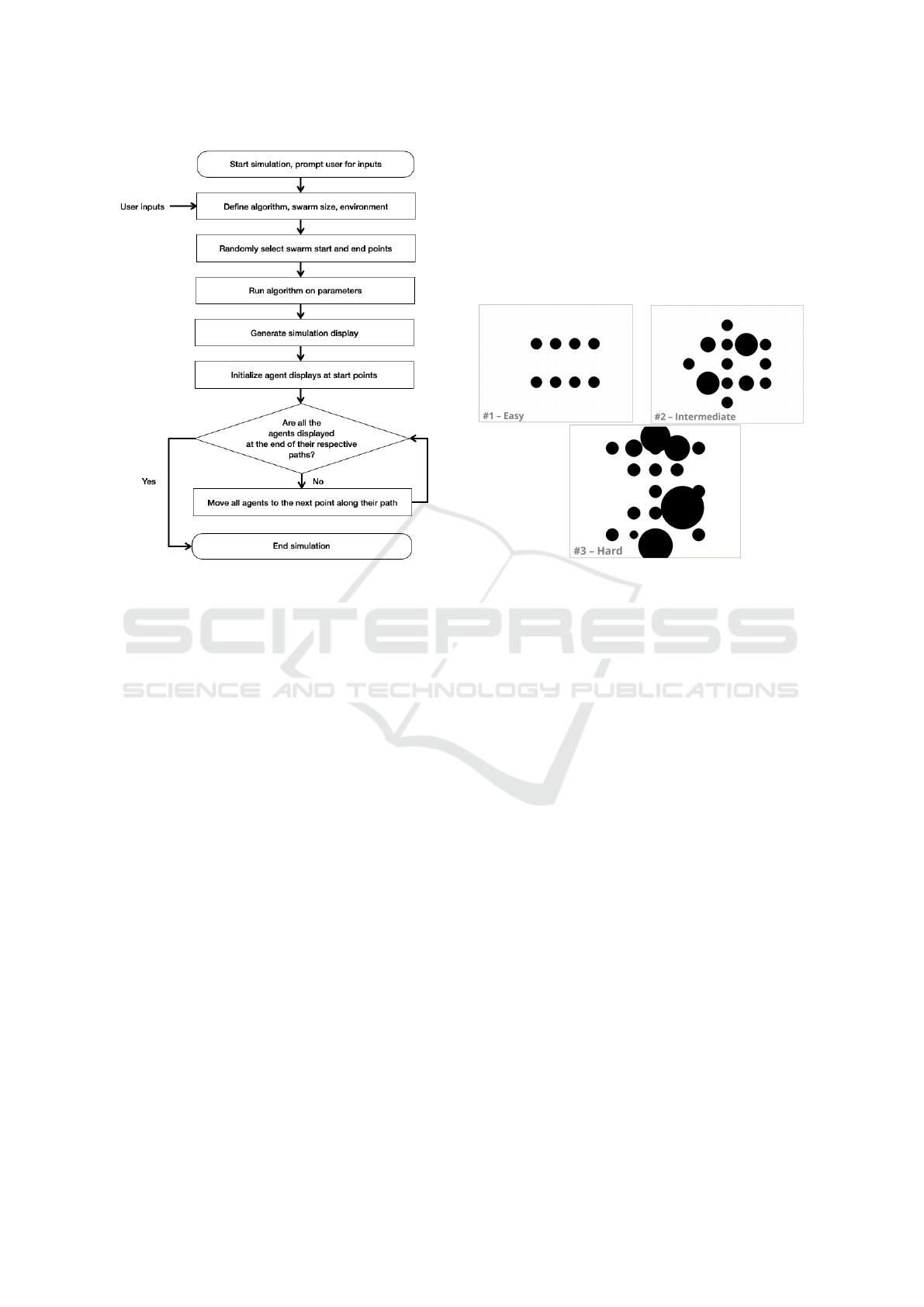
Figure 1: Simulation environment Workflow.
is used to create a simulation display with the environ-
ment obstacles. Next, the program generates random
initial start positions as well as the goal position for all
agents. All algorithms are run for all agents in the run
algorithms stage. The simulation display is created
to showcase the agents’ results which is followed by
plotting the agents’ initial positions. There is a loop
indicated at the diamond stage where every agent in
the group completes their movement until they have
reached the end of path planning. Lastly, once the
iteration count or goal position is reached, the simu-
lation is terminated.
While the structure of the environment can be ran-
domly generated, predetermined environments were
used to directly compare the performance of algo-
rithms. Three obstacle configurations of increasing
difficulty were developed, and are shown in Figure
2. The easy environment represents eight equal ob-
stacles of small diameter. In a last mile delivery ap-
plication, these obstacles might represent small trees,
lampposts, or other small structures, possibly orga-
nized in a structured way. The intermediate environ-
ment is more complex featuring a 5x5 grid of ob-
stacles of varying radii. Some cells in this environ-
ment are left empty to give the UAVs ample room
to navigate. This environment represents a slightly
more complex last mile delivery scenario, where there
might be a combination of trees of varying sizes and
infrastructure such as an electrical tower or lamp-
posts. The hard environment is also on a 5x5 grid,
but some obstacles are significantly larger than in the
intermediate environment. The lack of free space in
the hard environment makes it more difficult for the
UAVs to traverse without collisions. This represents a
tough delivery scenario with trees, infrastructure, and
other structures such as water towers, silos, or wind-
mills.
Figure 2: Simulation environments of increasing complex-
ity.
Using the developed environments, the simulation
was run for each algorithm, environment, and number
of agents (3, 5, and 10). Each of these unique config-
urations was run 50 times. For example, the MADPG
algorithm with five agents was run in the hard envi-
ronment 50 times. In total, each algorithm was run
450 times. The data collected was formatted and an-
alyzed to determine the characteristics of the imple-
mented algorithms.
3 PROPOSED PIPELINE AND
ALGORITHM
IMPLEMENTATION
The three different algorithms will have their own
classes in their own files and the main RunSim script
will call upon those classes to implement the different
methods. A* search algorithm will also be simulated
for each iteration of the script. Altogether, the algo-
rithms were run 450 times and produced results used
for analysis in Section 4.
In Figure 3, the user determines inputs such as
number of agents and which environment. This feeds
the script to run the algorithms with those param-
eters.The agents’ display is generated and then the
agents enter the loop where they keep moving until
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
750
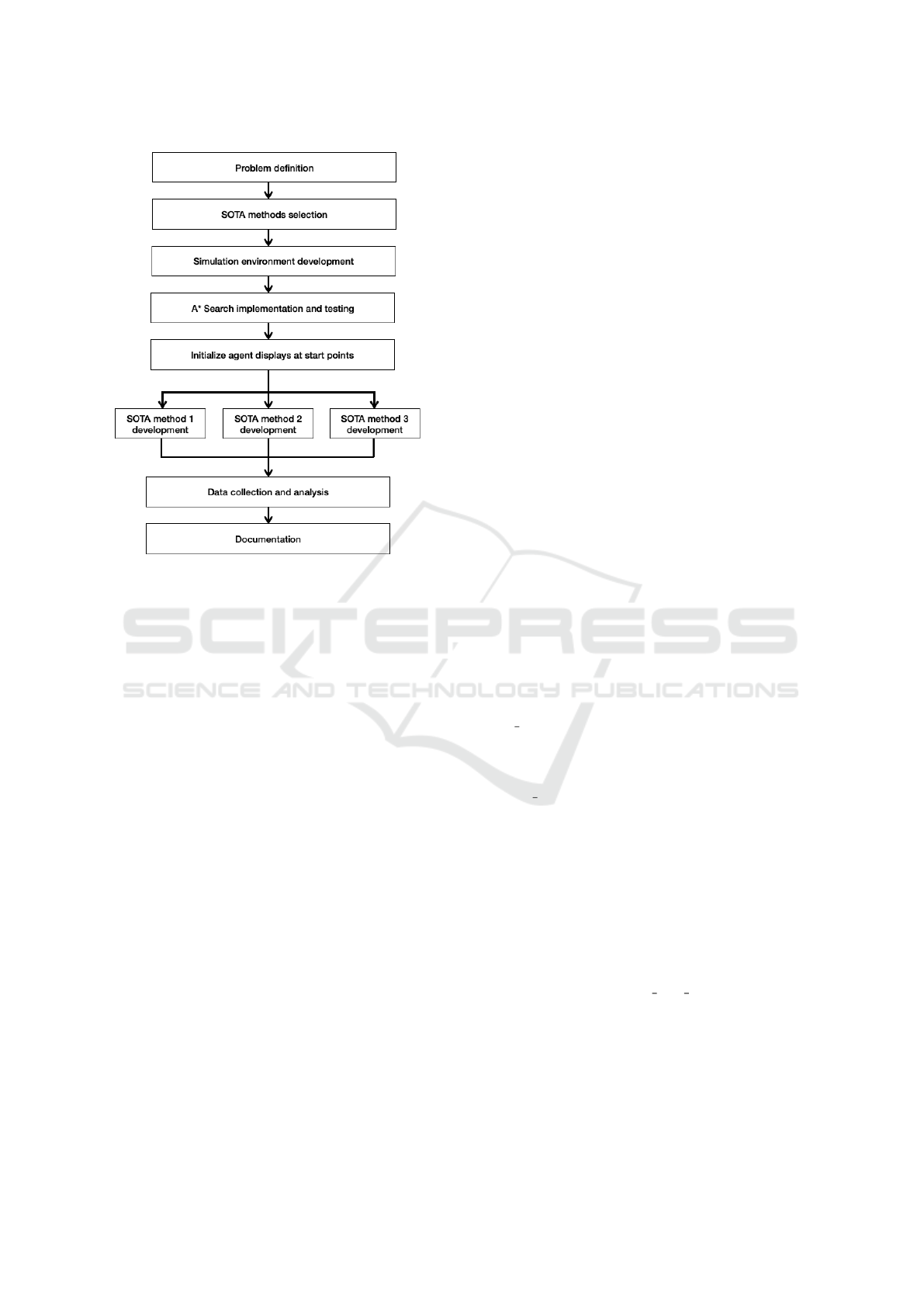
Figure 3: Proposed pipeline of simulation and general flow
logic.
all of them reach the goal or the simulation time ex-
pires. Lastly, the data from the simulations is saved
and compiled for analysis.
3.1 MADPG Algorithm
3.1.1 Approach
The MADPG algorithm iterates through all agents’
set of policies which themselves contain five states.
Afterwards, the policies are evaluated based on the
value function Bellman equation from Markov Deci-
sion Process. The gradient of these results are calcu-
lated and then compared. If a lower gradient is de-
tected, the main critic will push an update to all actors
or agents to become more forgiving of lower reward
policies, with the opposite case leading to stricter
thresholds for acceptable polices.
Inside each agent are a couple methods, including
state validator, action, reward and critic update func-
tions. The action method generates a policy based
on the simulated annealing search algorithm, where
the agents have a certain initial searching tempera-
ture that is cooled over time as the agents approach
the goal position. Each move is determined through
calculating the probability of a future move bringing
the agent closer to the goal. Each navigation episode
consists of five transitions, which are the transitions
from five different states or in this case positions. The
algorithm checks if the goal is reached within the pre-
defined movement speed; if so, the current position is
set to the goal position. Otherwise, the algorithm adds
a random angle between -30 to 30 degrees to generate
new potential destinations en route to the goal.
The policy path is evaluated for validity in the
state space. If the policy is acceptable with respect
to the boundaries according to the validator, the algo-
rithm then evaluates the energy cost for that transition
using the “reward” function. This is then used to cal-
culate the probability for approaching the goal state
using the aforementioned thermal equilibrium prob-
ability equation. The reward function calculates the
agent’s reward for a given state based on the maxi-
mum possible distance from the target position sub-
tracted by the current Euclidean distance to the goal.
There are any obstacles nearby within 12 units, a
penalty is applied to reward through subtraction from
the reward. This means the higher the reward, the
closer the agents are to the goal, while a lower number
indicates a large distance to the goal and encountering
many obstacles.
The critic update method takes signals from the
overarching critic to then update the parameters of the
agents. As agents complete the goal, the remaining
agents will be retrained differently as the algorithm
continuously updates the parameters. This is to simu-
late encouragement from other completed agents.
3.1.2 Pseudo-Code
First, obstacles, MADPG agent object, dis-
count factor, gradient, and paths must be initial-
ized. The positions, sizes and quantity of obstacles
are determined by the script. This will be used
by agents to determine if collisions happen. The
discount factor is hard coded in the program; it is a
decimal coefficient that changes the balance between
exploration of the environment against exploitation
of gathered information. Gradient and paths are
container lists for future data regarding the agents’
paths and performance.
The action method is an epsilon greedy method
that uses simulated annealing to enable random explo-
ration. Epsilon greedy finds the highest reward action
and proceeds with it for five steps. The simulated an-
nealing probability triggers a random action and helps
with exploration. For agent next reward, the method
searches the whole list of state-action values for the
agent and finds the one with largest reward.
In Step 1, there is a loop for each agent to call the
action method and move position. The outputs of this
are agents’ paths, path length and reward. In Step 2,
the value of each agent’s value function is calculated
according to the reward and argmax of a future action
Swarm Intelligence Path-Planning Pipeline and Algorithms for UAVs: Simulation, Analysis and Recommendation
751

Initialize Obstacles, MADPG agent object,
discount factor, gradient, paths, goal
Methods
action: Moves agent using epsilon greedy and
simulated annealing decision making
agent next reward: Calculates max of agent’s
next reward
for each episode do
for each agent do
(1) Call action method for five
iterations and store path, length
(2) Calculate reward from current state
against obstacles object, distance to
goal
(3) V (S) = reward + discount factor ×
agent next reward
end
(4) Calculate gradient for given state and
append to local memory
(5) Compare gradient to change critic
networks of all agents
(6) Append state to agent memory for
plotting
(7) Append local path data to expected path
list for plotting
if All agents reach goal then
End loop
end
end
return Executed paths for all agents
Algorithm 1: Reinforcement Learning Approach:
MADPG Pseudo Code.
reward, the discount value was set to be 0.5 to bal-
ance exploration and exploitation. The gradient of all
the agents’ reward functions is taken for the current
iteration in Step 3, which is simply the slope of cur-
rent reward values from the previous episodes. This
is then used to inform Step 4, which is to compare the
change in the gradient and then subsequently send an
update to all agents. If the gradient becomes negative,
an update is sent to make the agents more exploratory
and if the gradient is positive the update makes the
agents more focused. This tuning is accomplished via
increasing and decreasing the threshold of accepting
higher or lower quality values. Lastly in Step 5, the
state history of each agent is appended to help with
plotting. Steps 6, and 7 store the state and path history
of the agents for future analysis. The final if statement
ends the episode loop once all agents reach the goal
position.
For the example of five UAV delivery drones in the
swarm, each UAV will start at different random po-
sitions, representing different warehouses or distribu-
tion centers. The exploratory initial policy and similar
reward values near the initial starting position guides
them to make exploratory moves in the environment.
As the simulation iterates, the collective states from
the past five iterations are stored and analyzed for up-
dating the critic. The environment has obstacles and
some agents will enter the nearby boundary radius of
those regions. This triggers punitive rewards to dis-
incentive the agents. Instead agents pick locations
that circumvent obstacle and gain higher rewards the
closer they are to the goal. The episode ends after the
specified number of iterations are complete or after all
UAV agents reach the delivery goal.
3.2 HSGWO-MSOS Algorithm
3.2.1 Approach
As part of a broader agent-based simulation frame-
work, the Wolf class inherits from the Agent class,
allowing it to benefit from generic functionalities
shared among different agents in the simulation.
However, each Wolf object is also initialized with ad-
ditional crucial attributes such as fitness, which repre-
sents the fitness of the Wolf’s current position in the
optimization process, and is-alpha, a boolean flag des-
ignating whether the agent is responsible for guiding
the optimization process.
Moreover, the class includes two heuristic func-
tions that calculate Euclidean distances between
points in the search space and enable agents to nav-
igate and evaluate distances effectively. The up-
date fitness method plays a vital role in evaluating the
fitness of the Wolf’s current position in the optimiza-
tion process. It combines the Euclidean distance to
the goal (J fuel) and the threat posed by nearby obsta-
cles (J threat) into a weighted fitness value (J cost).
The update position method governs the updating of
the Wolf’s position based on its designation, either
Alpha or Omega. If the Wolf is an Alpha, it moves
towards the goal by normalizing the direction vector,
while Omega Wolves adjust their positions based on
a strength value that determines the attraction towards
the Alpha Wolf. The new position is verified for va-
lidity before updating, and the Wolf’s path and tem-
porary path are recorded accordingly.
During the exploration phase, commensal agents
utilize the explore method to randomly explore the
search space by moving in different directions. This
method generates a random angle and calculates a
new destination point, attempting to strike a bal-
ance between exploration and obstacle avoidance
while remaining in a commensal state. The make-
alpha, make-omega, make-commensal, and i-already-
explored methods manage the designation of the
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
752

Wolf, allowing it to take on different roles as Alpha,
Omega, or commensal explorer, depending on the op-
timization stage.
3.2.2 Pseudo-Code
Initialize Obstacles, Wolf agent object, Alpha
strength factor (constant), goal position, paths
Methods
update hierarchy Evaluates and compares the
fitness of all agents, designates Alpha,
Omegas, and commensal explorers
evaluate fitness Combines the Euclidean
distance to the goal (J
f uel
) and the threat
posed by nearby Obstacles (J
threat
) into a
weighted fitness value (J
cost
)
update position Updates agent position based
on Alpha/Omega designation and Alpha
strength factor
for each iteration do
(1) Update Wolf hierarchy for each Wolf
do
(2) Update agent position
if Wolf is a commensal explorer then
(3) Evaluate 5 random nearby
locations
if Explored location is better than
current position then
(4) Update agent position
end
end
;
(5) Append new position to paths
end
end
return Executed paths for all agents
Algorithm 2: Bio-Inspired Approach: HSGWO-MSOS
Pseudo Code.
After initializing the multi-agent HSGWO-MSOS
swarm, the first step of the algorithm is to define the
fitness of all Wolves and create a hierarchy by iden-
tifying the Alpha (best individual), Omegas (all other
agents), and commensal explorers (randomly selected
Omega Wolves). At each iteration, the Alpha Wolf
evaluates (Step 2) the next best position based on its
position, nearby obstacles, and the desired goal. Each
Omega Wolf consequently evaluates their next best
position based on the Alpha’s location. In Step 3, the
commensal explorer randomly searches five nearby
locations and evaluates the potential fitness of these
positions. If it finds a location that is better than its
current position, it moves to this new spot (Step 4).
Otherwise it remains in its current position. After
each wolf has updated its position, it appends the new
position to its path (Step 5). This process is iteratively
repeated from the beginning (Step 1), where the fit-
ness of all Wolves is evaluated once again and a new
hierarchy is defined. The agent with the best fitness
is defined at the new Alpha. All other Wolves are la-
beled as Omegas and a new commensal explorer is
chosen for the next iteration.
For example, in a swarm of five UAV agents, each
UAV’s fitness is evaluated at initialization with re-
spect to the goal position and nearby obstacles. The
best scoring UAV is designated as the Alpha, while
the remaining four UAV are designated as Omegas.
One of the Omegas is randomly selected to be the
commensal explorer. The Alpha UAV updates its po-
sition first, by moving towards the goal position along
the normalized direction vector. The four Omega
UAVs then update their positions by taking into con-
sideration both the Alpha’s new position, as well as a
constant strength factor. Finally, the commensal ex-
plorer UAV considers five randomly chosen nearby
locations and evaluates them. If any of those loca-
tions is better than its current position, it moves to it.
After all five agents have moved to their positions, the
fitness of each UAV is re-evaluated and the hierarchy
is updated. The UAV with the best scoring fitness is
now considered the Alpha, while the rest are consid-
ered Omegas, and a new commensal exploring Omega
is also selected. This process is repeated until the al-
gorithm returns the completed paths for the UAV.
3.3 Improved APF Algorithm
3.3.1 Approach
The Improved APF algorithm provides a robust and
adaptive framework for modeling multi-UAV sys-
tems. While there are multiple iterations of Improved
APF algorithms, this work will focus on leveraging
SOTA methodology described in Dongcheng (2020)
and Zhang (2022). In these methods, there is a com-
mon focus of modeling interactive repulsive forces
between UAVs.
To properly implement this algorithm, all repre-
sentative forces are considered for each agent, indi-
vidually. These forces are derived from the attractive
and repulsive potential fields throughout the environ-
ment. The attractive force created by the goal coun-
teracts the repulsive forces acting on each agent. Re-
pulsive forces for each obstacle in the environment are
implemented as well as repulsive forces between each
agent. For each agent, the total force is calculated and
broken down into component form, then later vector
summed together in order to move the agent forward
at each iteration.
Swarm Intelligence Path-Planning Pipeline and Algorithms for UAVs: Simulation, Analysis and Recommendation
753

It is necessary to include a solution to the jitter
problem as an aspect of the Improved APF implemen-
tation (Dongcheng and Jiyang, 2020). For each step
in the simulation, each agent is tested to analyze if it
is in a state of jitter. More specifically, this jitter state
occurs when the change in the angle of the resultant
force is between 180
◦
and a specified threshold value
between the current state and the previous state. If
this jitter condition is met, a dynamic step adjustment
is included when calculating the next position of each
agent. The dynamic step adjustment allows for each
agent to alter its step size to smoothly escape from
jitter scenarios.
A simplified approach for the Improved APF al-
gorithm is included in the Section 3.3.2 Pseudo-code.
3.3.2 Pseudo-Code
Initialize Obstacle set O, UAV agent set A,
Goal State g, paths
Methods
dynamicStepAd justment: Adjusts step size
updatePosition: Updates the position of the
agent
for each agent a in A do
(1) Calculate attractive force F
att
(a, g)
(2) Calculate repulsive force F
rep
(a, O)
(3) Calculate repulsive force F
rep
(a, A)
from each other agent in A
(4) Calculate F
tot
=
∑
F
att
+
∑
F
rep
if agent is in jitter state then
(5) dynamicStepAd justment
end
else
(6) updatePosition of a in direction of
F
tot
end
;
(7) Append new position to paths
end
return Executed paths for all agents
Algorithm 3: Physics-Based Approach: Improved APF
Pseudo Code.
To begin, the obstacle set, goal state, path variables,
and agent sets are initialized. All agents in the multi-
agent swarm are configured to run the Improved APF
algorithm. Inside each agent are a set of methods nec-
essary to execute the algorithm. Methods for calcu-
lating the attractive force between the agent and the
goal, F
att
(a, g), the repulsive force between the agent
and obstacles, F
rep
(a, O), and the repulsive force be-
tween the agents and all other agents in the swarm,
F
rep
(a, A). Another method is used to calculate the
total force, F
tot
, from all acting forces. A dynamic
step adjustment method is embedded in this imple-
mentation to solve assist the agent in escaping a jitter
state. Lastly, an update position function is included
to update the position of the agent at the end of each
loop. This position is appended to the agent’s path for
plotting within the simulation. For each agent in the
swarm, Steps 1-3 are used to calculate the component
forces acting on the agent. Step 4 takes the vector sum
of these forces to calculate the total force. A check is
made to ensure the agent is not in a jitter state. If the
agent falls into a jitter state, Step 5 is executed using
the dynamic step adjustment function. If the agent is
not in jitter state, Step 6 is executed using the update
position function.
Take a five-agent swarm, where all agents are run-
ning the Improved APF algorithm. They start in five
different positions, and need to avoid obstacles as well
as each other to reach the goal state. The pseudo-
code defined in Algorithm 3, describes the behavior of
these agents at each iteration of the simulation. The
algorithm is run until all agents reach the goal state
or the iteration limit is reached. At the first iteration,
each agent calculates the resultant force by first find-
ing all attractive and repulsive forces acting on the
agent. The agent updates its position with regard to
this resultant force. The positions of each other agent
are paramount to calculating the new position of the
current agent, as those repulsive forces affect the re-
sultant force for the given agent. In this example, an
assumption is made that the agent closest to the goal
gets stuck in a local minima near two obstacles. The
subsequent agents behind the furthest agent are able
to ”push” the stuck agent out of the local minima, al-
lowing for it to reach the goal. Each agent in this
swarm will help guide the further agent out of these
local minima. It is, however, possible for the last
agent to get stuck in this same local minima. If this
local minima causes the agent to jitter, the improved
APF algorithm leverages dynamic step adjustments to
guide the last agent to the goal.
4 SIMULATION RESULTS,
ANALYSIS, AND
RECOMMENDATIONS
4.1 Success Rate Results
Figure 4 shows the success rate results for each al-
gorithm in each environment. After analyzing the re-
sults, MADPG stands out with a high success rate in
complex environments. The randomization in the al-
gorithm leads to a high probability of success as the
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
754
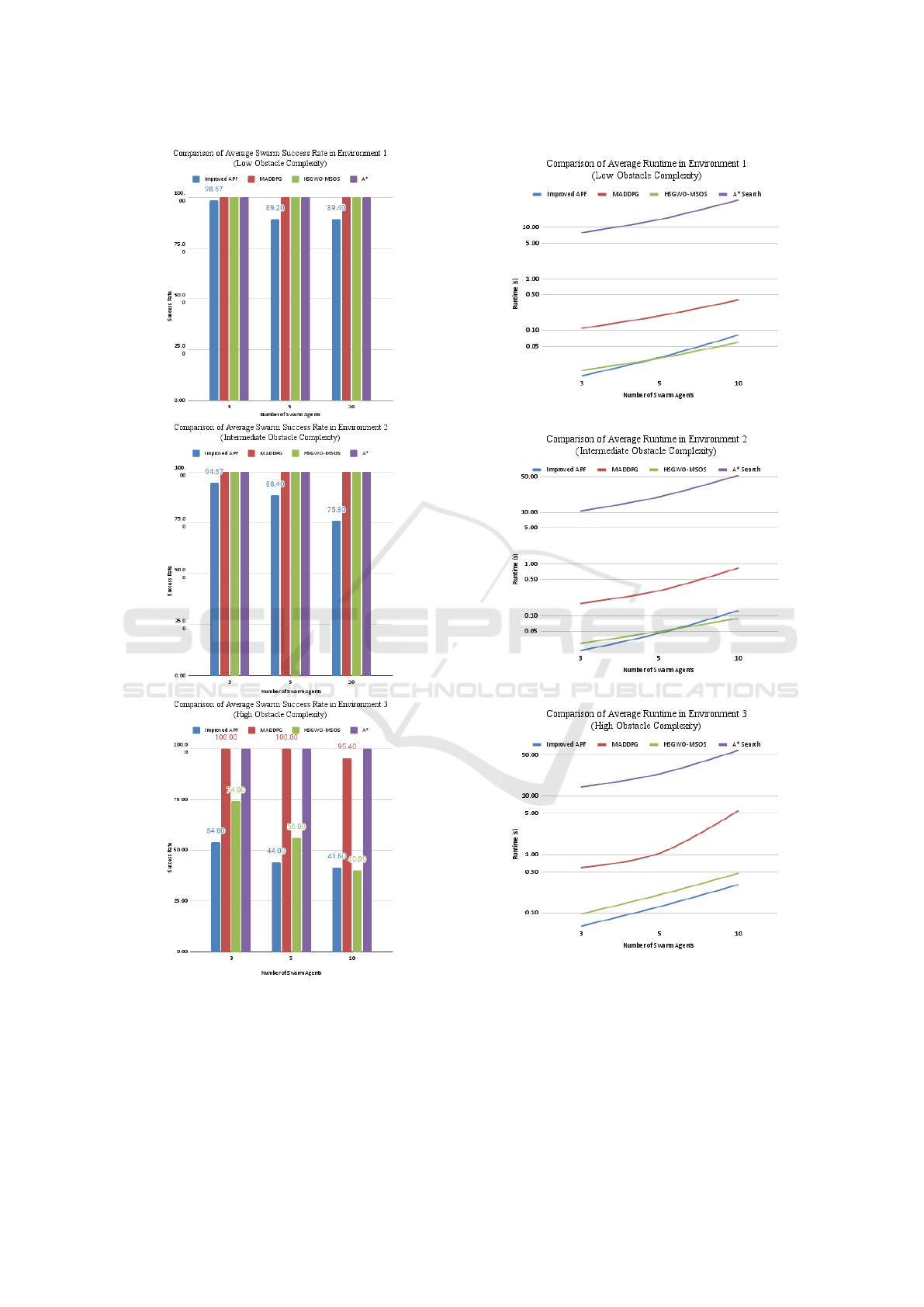
Figure 4: Average swarm success per environment.
number of iterations increases. HSGWO-MSOS and
Improved APF seem to have lower success rate, as
they are less reliant on randomization to escape local
minima, and may become stuck. Improved APF has
lower success rates than HSGWO-MSOS due to the
likelihood of some agents getting stuck to help other
Figure 5: Average algorithm run-time per environment.
agents. MADPG by far is the best algorithm devel-
oped if the goal is to solely increase success rate. This
is not considering A* Search, which has a perfect suc-
cess rate across the environments due to the informed
nature of the algorithm.
Swarm Intelligence Path-Planning Pipeline and Algorithms for UAVs: Simulation, Analysis and Recommendation
755
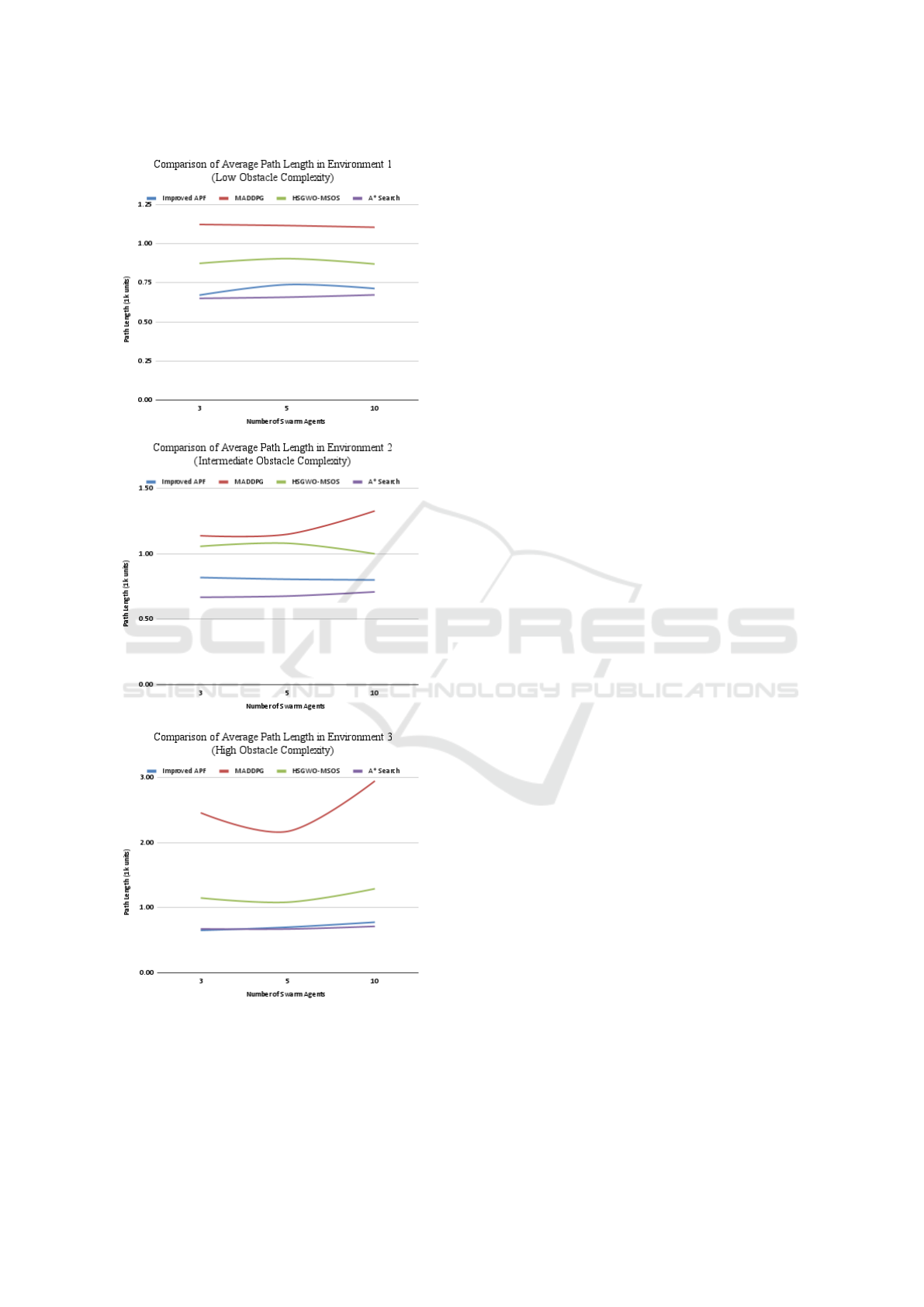
Figure 6: Average algorithm path length per environment.
4.2 Runtime Results
Figure 5 shows the runtime results for each algorithm
in each environment. The runtime of Improved APF
and HSGWO-MSOS are lower than the runtime of
MADPG by a fair margin. This is exasperated in high
complexity, large swarm situations. When Improved
APF and HSGWO-MSOS agents end up stuck in lo-
cal minima, an iteration cap may end the program as
they are not as reliant on randomization to escape lo-
cal minima. The MADPG algorithm will sacrifice
runtime to escape a local minima using randomiza-
tion. Improved APF and HSGWO-MSOS sacrifice
success rate for a decreased runtime. A* Search in
all three environments is a scale of magnitude greater
than the runtime of the three SOTA algorithms.
4.3 Path Length Results
Figure 7 shows the path length results for each algo-
rithm in each environment. The average generated
path lengths of the algorithms are compared against
A* as a baseline. The A* Search algorithm conducts
an informed search on the environment instead of a
partially informed search, and in turn has a perfect
success rate, increased runtime, and also finds the
shortest possible path from the start point to the end
point. Paths that ended up being incomplete were
not included in averages. Improved APF generated
path lengths that were very similar to A*, especially
in high complexity environments. However, this is
partially due to selection bias. As Improved APF’s
success rate decreases, the path lengths that are gen-
erated are more likely to be simple, straight paths to
the end goal. HSGWO-MSOS also generated path
lengths similar to that of A* and Improved APF. It
also was affected by this selection bias of results.
MADPG maintained a high success rate across all en-
vironments, and was not subject to this selection bias.
In high complexity environments, the algorithm cre-
ated path lengths over three times the length of other
algorithms. Even in low complexity environments,
it produced the longest path lengths of all the algo-
rithms. In Environment 3, the increased difference
of path lengths is likely related to selection bias, but
the results of Environment 1 do show that MADPG
generated the longest paths, Improved APF generated
the shortest paths, and HSGWO-MSOS generated the
middlemost paths.
4.4 Recommendations
The code effectively implemented all three SOTA
methods: MADPG, HSGWO-MSOS, and Improved
APF. Our work completed development of a 2D simu-
lation environment that effectively tested these meth-
ods. In addition, a data pipeline was designed to ef-
fectively run algorithms for path planning of multi-
agent swarms. The average results for each method
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
756
are summarized in Table 1.
Table 1: Average results by swarm intelligence path-
planning method.
Approa-
ch
Classi-
cal
RL
Bio-
Inspired
Physics-
Based
Algori-
thm
A*
Search
MAD-
PG
HSGWO-
MSOS
Improv-
ed
APF
Swarm
Suc-
cess
Rate
[%]
100.0 99.8 88.4 48.4
Runtime
[sec-
onds]
26.67 1.03 0.11 0.09
Path
Length
[1k
units]
677.5 2725.8 1034.6 742.1
MADPG exhibits a high average swarm success
rate regardless of swarm size or environment com-
plexity. It is an ideal choice for longer distance de-
liveries where shipping completion and reliability is
paramount. Given that its runtimes and paths are
longer on average than the other methods, this re-
inforcement learning approach is more suitable for
scenarios where real-time decision-making or effi-
cient path lengths is not a strict requirement. Alter-
natively, HSGWO-MSOS provides a reasonable av-
erage swarm success rate with lower runtimes and
path lengths. This bio-inspired method provides a
good balance of success rate and efficiency for sce-
narios where reliable, timely responses are needed
and resources like UAV battery-life may be limited.
It would most useful in urban last mile deliveries.
Lastly, Improved APF has a lower success rate, but
the fastest runtimes and shortest path lengths on av-
erage, making this physics-based approach suitable
for scenarios where package recovery is more eas-
ily attainable, and minimizing distances and rapid
decision-making take precedence.
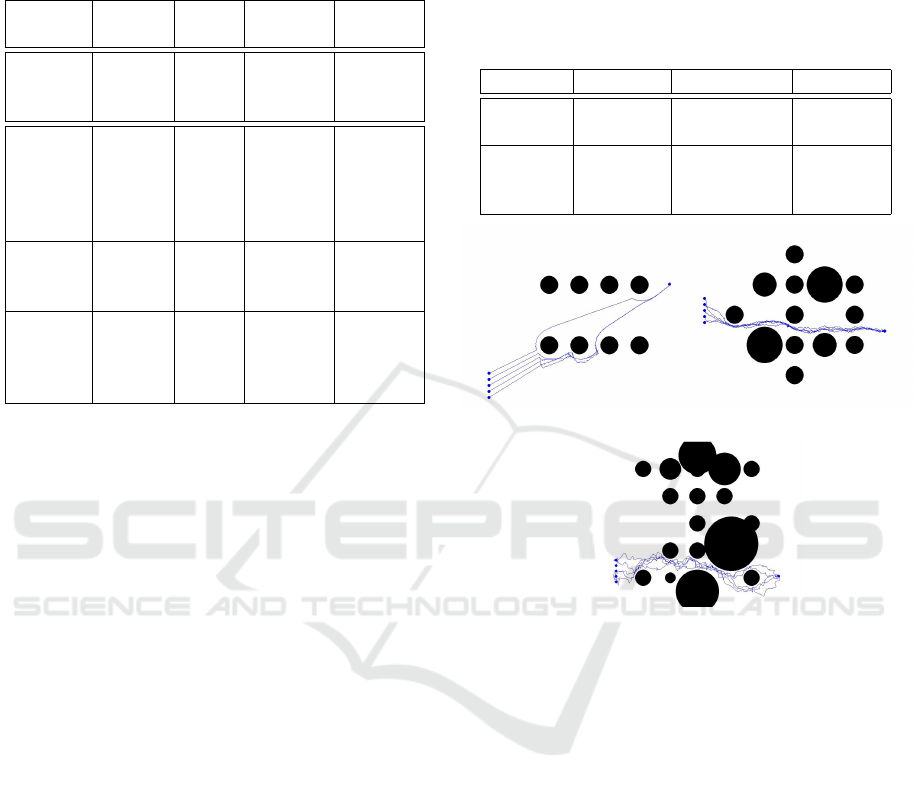
Table 2 summarizes the findings for each algo-
rithm in each environment with respect to the ur-
gency of transported goods. The urgency of goods
can be directly correlated to the path length and run-
time of the algorithms. Since Improved APF and
HSGWO-MSOS exhibit faster runtimes and overall
shorter path lengths, they are more suitable for deliv-
ery of urgent goods. However, for non-urgent goods,
reliability may be prioritized over speed. In this sce-
nario, MADPG is recommended due to its high relia-
bility in complex environments. Figure 7 shows com-
pleted simulations and paths for five-agent swarms.
Each algorithm is showcased in its optimal and rec-
ommended environment.
Table 2: Recommended Algorithm depending on environ-
ment complexity and urgency of goods.
Environ. Easy Intermediate Hard
Urgent
Goods
Improved
APF
HSGWO-
MSOS
HSGWO-
MSOS
Non-
urgent
Goods
HSGWO-
MSOS
MADPG MADPG
(a) (b)
(c)
Figure 7: Sample algorithm performance in recommended
Environments.
(a) Easy environment with Improved APF.
(b) Intermediate environment with HSGWO-MSOS.
(c) Hard environment with MADPG.
5 CONCLUSIONS AND FUTURE
WORK
In this paper, we focus on swarm robotics and its
application to multi-agent path planning for UAVs
in unfamiliar environments and unknown static ob-
stacles. This work aims to support domain ex-
perts in the selection of proper path planning algo-
rithms for UAVs to solve a domain business prob-
lem (i.e., the last mile delivery of goods). In-
depth analysis, insight, and recommendations of
three promising approaches, including reinforcement
learning-based (i.e., Multi-Agent Deterministic Pol-
icy Gradient (MADPG)), bio-inspired-based (i.e., Hy-
brid Simplified Grey Wolf Optimization with Modi-
Swarm Intelligence Path-Planning Pipeline and Algorithms for UAVs: Simulation, Analysis and Recommendation
757

fied Symbiotic Organism Search (HSGWO-MSOS)),
and physics-based (i.e., Improved Artificial Potential
Field (APF)) are used to address the multi-agent UAV
path planning problem. Specifically, the contributions
of this work are fourfold: First, we develop a unified
pipeline to implement each approach to conduct this
analysis. Second, we build a 2D UAV path planning
environment to simulate each approach. Third, using
this 2D environment, we run the 450 simulations in
three different group sizes of swarm UAV agents (i.e.,
3, 5, and 10) within three environments of varying
complexity (i.e., Easy, Intermediate, and Hard). We
aggregate the simulation data and compare their per-
formance in terms of success rate, run-time, and path
length while using the classical A* Search as a base-
line. Finally, based upon the performance of each ap-
proach and our analytical investigations, we provide
informed recommendations for the optimal use case
of each UAV path planning approach. The recom-
mendations are presented using parameters for envi-
ronmental complexity and urgency of goods delivery.
While these recommendations are relevant in the do-
main of last mile delivery, further research is needed
to investigate elements of the problem not covered in
this work. Further research includes, but is not limited
to, inter-agent collisions, dynamic obstacles, 3D path
finding, and novel algorithms for solving multi-agent
path planning more efficiently and effectively.
ACKNOWLEDGEMENTS
The authors would like to acknowledge and thank
Professor Chun-Kit Ngan for his support and advice
during this project.
REFERENCES
BIS (2019). Global uav market value in 2018 and 2029 (in
billion u.s. dollars). Technical report, Statista.
DHL (2023). 4 ways to improve your last-mile delivery
performance. DHL.
Dongcheng, L. and Jiyang, D. (2020). Research on multi-
uav path planning and obstacle avoidance based on
improved artificial potential field method. 2020 3rd
International Conference on Mechatronics, Robotics
and Automation (ICMRA).
Huang, Y., Wu, S., Mu, Z., Long, X., Chu, S., and Zhao, G.
(2020). A multi-agent reinforcement learning method
for swarm robots in space collaborative exploration.
2020 6th International Conference on Control, Au-
tomation and Robotics (ICCAR).
Kim, E. and Long, K. (2022). Amazon will pay a whopping
63 dollars per package for drone delivery in 2025 and
it shows just how the company is still grappling with
cost issues for last-mile delivery. Business Insider.
Li, F. and Kunze, O. (2023). A comparative review of air
drones (uavs) and delivery bots (sugvs) for automated
last mile home delivery. Logistics.
Qu, C., Gai, W., Zhang, J., and Zhong, M. (2020). A novel
hybrid grey wolf optimizer algorithm for unmanned
aerial vehicle (uav) path planning. Knowledge-Based
Systems, 194, 105530.
Shinners, P. (2011). Pygame. http://pygame.org/.
Staff, A. (2023). Amazon announces 8 innovations to bet-
ter deliver for customers, support employees, and give
back to communities around the world. Technical re-
port, Amazon.
Tan, Y. and Zheng, Z. (2013). Research advance in swarm
robotics. Defence Technology.
Theraulaz, G., Dorigo, M., and Trianni, V. (2021). Swarm
robotics: Past, present, and future. In Proceedings of
the IEEE.
Tractica (2019). Projected commercial drone hardware unit
shipments worldwide from 2020 to 2025. Technical
report, Statista.
Wu, E., Sun, Y., Huang, J., Zhang, C., and Li, Z. (2020a).
Multi uav cluster control method based on virtual core
in improved artificial potential field. IEEE Access, 8,
131647–131661.
Wu, S., Huang, Y., Mu, Z., Long, X., Chu, S., and Zhao,
G. (2020b). A multi-agent reinforcement learning
method for swarm robots in space collaborative ex-
ploration. 6th International Conference on Control,
Automation and Robotics.
Xu, C., Xu, M., and Yin, C. (2020). Optimized multi-
uav cooperative path planning under the complex con-
frontation environment. Computer Communications,
162, 196–203.
Xue, J., Zhu, J., Du, J., Kang, W., and Xiao, J. (2023).
Dynamic path planning for multiple uavs with incom-
plete information. Electronics, 12(4), 980.
Zhang, M., Liu, C., Wang, P., Yu, J., and Yuan, Q. (2022).
Uav swarm real-time path planning algorithm based
on improved artificial potential field method. 2021
International Conference on Autonomous Unmanned
Systems (ICAUS 2021).
Zhao, Y., Liu, K., Lu, G., Hu, Y., and Yuan, S. (2020). Path
planning of uav delivery based on improved apf-rrt*
algorithm. Journal of Physics: Conference Series,
1624:042004.
Zhen, Z., Chen, Y., Wen, L., and Han, B. (2020). An in-
telligent cooperative mission planning scheme of uav
swarm in uncertain dynamic environment. Aerospace
Science and Technology, 100, 105826.
Zhu, J., Xue, J., Du, J., Kang, W., and Xiao, J. (2023).
Dynamic path planning for multiple uavs with incom-
plete information. Electronics.
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
758
