
Connected Vehicle Perception Monitoring: A Runtime Verification
Approach for Enhanced Autonomous Driving Safety
Redge Melroy Castelino
a
, Karina Rothemann
b
, Arne Lamm
c
and Axel Hahn
d
Institute of Systems Engineering for Future Mobility, German Aerospace Center, Escherweg 2, 26121 Oldenburg, Germany
Keywords:
Runtime Verification, Collective Perception, Vehicle Environment Perception.
Abstract:
Modern autonomous vehicles rely heavily on complex sensor systems for perception tasks, including Ad-
vanced Driver Assistance Systems and Autonomous Driving Systems. Accurate sensor perception is essential
to ensure the safety of these systems, especially as the level of automation increases. External sensors from
the infrastructure or other vehicles can provide useful information to verify the trustworthiness of on-vehicle
sensors using V2X communication. This paper presents a novel concept of runtime monitoring to verify the
performance of ADS perception systems, taking advantage of the design diversity of connected vehicles and
infrastructure based perception sensors in Intelligent Transportation Systems. The proposed approach uses
standardised V2X services, such as Collective Perception Service and Location Service from connected par-
ticipants to estimate a reliable common environment model (CEM) of the driving situation. The established
CEM can be used to evaluate the quality of perception of individual road participants during operation, allow-
ing detection and mitigation of system malfunctions of a connected vehicle perception system and enhancing
road safety in connected environments. We also discuss open design questions with respect to the perception
runtime monitor concept.
1 INTRODUCTION
Modern vehicles are increasingly equipped with ac-
tive safety systems, including Advanced Driver Assis-
tance Systems (ADAS) which utilize complex sensors
to determine the internal state of the vehicle as well as
its surrounding environment to support the driver with
critical information such as lane departure warning
(LDW) or by intervention in vehicle control such as
autonomous emergency braking (AEBS). In advanced
versions of ADAS, also known as Autonomous Driv-
ing Systems (ADS), the responsibility to monitor the
driver environment and control the vehicle lies with
system. Based upon the distribution of driving tasks
between the driver and the system, such as monitoring
the driving environment and fallback when the sys-
tem fails or reaches its limits, the Society of Automo-
tive Engineers (SAE) defines five levels of automation
(SAE Standard J3016, 2021).
Nowadays, the safe operation of a vehicle depends
a
https://orcid.org/0009-0001-2016-3988
b
https://orcid.org/0009-0000-7030-7962
c
https://orcid.org/0000-0002-8815-3444
d
https://orcid.org/0000-0003-2240-5351
increasingly on the fault-free interaction of embed-
ded electronics and software. The resulting require-
ments to ensure system safety led to the publication
of the International Organization for Standardization
(ISO) 26262 in 2011. This is an extension of Interna-
tional Electrotechnical Commission (IEC) 61508 for
the application of electrical/electronic (E/E) systems
in road vehicles, which provides specifications and
processes for ensuring functional safety. Similarly,
the ISO 21448 standard discusses Safety Of The In-
tended Function (SOTIF) of ADAS and ADS to en-
sure exclusion of unreasonable risk due to hazards
from functional deficiencies of the intended function.
Ensuring operational safety is especially challeng-
ing from SAE level 3 automation onwards, since the
driver no longer performs any active driving tasks dur-
ing operation and it is the system’s responsibility to
monitor its driving environment and recognise when
it reaches its operational limits, so that an appropri-
ate fallback mechanism can take over. This implies
rigorous safety validation demands for such systems.
However, despite various advancements, the greatest
challenges for deployment of ADS at higher levels of
automation is the infeasibility of complete exhaustive
testing during design time verification (Koopman and
402
Castelino, R., Rothemann, K., Lamm, A. and Hahn, A.
Connected Vehicle Perception Monitoring: A Runtime Verification Approach for Enhanced Autonomous Driving Safety.
DOI: 10.5220/0012696400003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 402-409
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

Wagner, 2016).
The recent UL4600 standard provides an overview
of various safety principles, tools, techniques and life
cycle processes to build and evaluate a safety ar-
gument of an autonomous vehicle (AV) (UL 4600,
2022). In addition to various verification and valida-
tion techniques during design and development such
as software unit testing, stress testing, model-in-the-
loop (MiL) testing, software-in-the-loop (SiL) testing,
Hardware-in-the-loop (HiL) testing, the standard rec-
ommends runtime monitoring of safety related opera-
tional faults and design assumption violations.
Current approaches of assuring ADS safety in-
cludes identification of safety requirements using ap-
propriate Hazard and Risk Analysis (HARA) tech-
niques and verification of safety requirements with
rigorous design time verification complemented with
runtime verification approaches.
For safety critical automotive systems, even with
a well formulated specification and implementation,
runtime faults can arise from unanticipated operating
conditions, maintenance errors, runtime faults, ma-
licious attacks and other sources (Koopman, 2011).
Therefore, to ensure safe fault-free operation of ADS,
it is essential to complement design time verification
with runtime verification.
Consider ADS perception, a system failure, such
as false negative detection of a road user could lead to
a life threatening situation during its operation. While
ADS perception is subjected to rigorous design time
testing, it is infeasible to test in all variations of op-
erating conditions. Typically, such safety critical sys-
tem requirements that cannot be design-time verified
in all operating conditions are subject to runtime ver-
ification to assure safety. Runtime monitoring is the
detection of anomalies in a target system by compar-
ing the observed state of the system to an expected
state of the system (Delgado et al., 2004). However,
estimating the expected state of a complex system
such ADS perception during its operation is not a triv-
ial task. In this paper, the authors propose a novel
approach to detect degradation of environment per-
ception quality of Connected Autonomous Vehicles
(CAVs), by estimation of a collective expected state
of the system by leveraging developments in Vehicle-
to-Everything (V2X) services to compare the environ-
ment representations of multiple connected vehicles
and infrastructure sensors. We further discuss design
challenges for a safe perception monitor design and
estimation of the expected state of the environment
around the AV using V2X services.
We continue this paper in section 2 with a discus-
sion of works related to runtime verification. In sec-
tion 3, we introduce our runtime verification concept
using standardized V2X services to monitor ADS per-
ception and in section 4, we discuss challenges and
open questions to ensure a safe monitor design, which
is followed by a conclusion in section 5.
2 RUNTIME VERIFICATION FOR
SYSTEM SAFETY
In this section, we briefly examine runtime verifica-
tion (RV) in the context of software and embedded
systems. We further discuss RV in the context of auto-
motive embedded systems and the systems of systems
approach to RV adopted in general aviation systems.
RV is a verification technique that complements
traditional design time verification approaches of a
system such as theorem proving, model checking and
testing by monitoring the execution of the system un-
der observation (SuO) to check if it satisfies or vio-
lates a specification or correctness property (Leucker
and Schallhart, 2009). An example of RV is the sim-
plex architecture, where the monitor verifies whether
the executing SuO satisfies a specification and upon
detection of an anomaly, triggers a fail safe mecha-
nism, which switches control to a more conservative
and trusted component that can steer the SuO to a safe
state (Sha, 2001).
By using monitors during system deployment, RV
acts as a tool to improve system safety and reliability
by acting as a safety net around the monitored appli-
cation (Nelissen et al., 2015). Concepts of runtime
monitoring are applicable for both software systems
as well as cyber-physical systems. A common im-
plementation of RV for safety critical software is in-
jecting the monitoring code into the application code
of the SuO (Chen and Ros¸u, 2007; Barringer et al.,
2004). When the monitoring code is embedded into
target code or system and thus consequently utilizes
the resources of the monitored program or system, it
is referred to as inline monitors. Conversely, moni-
toring can be executed as a separate process or thread
on a separate machine, also known as offline mon-
itors. The various possible design approaches for a
runtime monitor, along with nomenclature are elab-
orated in detail in (Bartocci et al., 2018; Pike et al.,
2011; Delgado et al., 2004). One approach for safety
critical embedded systems is the commander/monitor
(com/mon) approach, wherein a commander or SuO,
monitor and fall back system are implemented as fault
containment regions (FCR). When the monitor deter-
mines the output of the commander to be unsafe, con-
trol is passed on to a fallback system. An application
of such a com/mon paradigm for ADS trajectory plan-
ning tasks is discussed in (Mehmed et al., 2020).
Connected Vehicle Perception Monitoring: A Runtime Verification Approach for Enhanced Autonomous Driving Safety
403

Based upon the functional decomposition of tasks
an ADS performs, one of the first and most com-
mon functional paradigms for automated vehicles is
the sense-plan-act paradigm (Anderson et al., 2014).
Based upon this paradigm, runtime monitors for au-
tomotive embedded systems can be categorized into
five types (Mehmed, 2020).
Type 1 monitors are associated with classic ve-
hicle embedded systems such as an engine control
system (ECS) or anti-lock braking. These runtime
monitors are employed to observe relevant system pa-
rameters such as engine coolant temperature for the
ECS to avoid engine overheating. When the tem-
perature exceed a certain threshold, the monitor in-
structs the ECS to adopt an appropriate risk mitigating
action such as activating the radiator fan or inform-
ing the driver via the dashboard. Similarly, monitor-
ing of extra functional properties during runtime via
structural contracts increase the reliability of designed
extra-functional multi-domain models (Nitsche et al.,
2017).
Some monitors adopt prognostic frameworks to
estimate the degradation of coupled systems or com-
ponents to facilitate timely maintenance (Sankavaram
et al., 2013). Runtime monitors can also be used to
verify compliance to regulations such as vehicle ex-
haust emissions during operation to detect any fraud-
ulent behaviour by the system under test (SuT) dur-
ing standardized test conditions to curb the problem
of doped software that alters its behaviour under cer-
tain conditions (Hermanns et al., 2018).
Type 2 monitors include approaches such as Built-
In Self-Tests (BIST), cyclic redundancy codes (CRC),
watch dog timers etc. that verify the overall health
of the SuO. These monitors are generally used to de-
tect and mitigate various software and hardware faults
that can cause a system to perform sub-optimally. In
automotive networks, parity check codes, arithmetic
checksums and CRC are commonly used for error de-
tection to consequently trigger a re-transmission of
the corrupted message (Rahmani et al., 2007). Other
examples of Type 2 monitors include software watch-
dogs that monitor individual timing constraints of ap-
plications and their program flow to detect timing
faults and provide information for fault treatment or
containment (Chen et al., 2007), BIST to detect com-
munication failures associated with the airbag system
of a vehicle using read data by identifier (RDBI) and
write data by identifier (WDBI) services of airbag
control unit (Sasikumar et al., 2011).
Type 3 runtime monitors verify the performance
of ADS perception and detect failures associated with
the sense or perception operation of the ADS.
Type 4 runtime monitors verify the output from the
path planning module of the ADS. Some examples in-
clude a monitor that verifies the trajectory from the
trajectory planning modules of the ADS under obser-
vation, to ensure that the proposed trajectory does not
lead to any collision with road obstacles or drive into
a non-drivable area and a driving policy verification
module that verifies whether the planned driving path
conforms to traffic rules and regulations such as road
speed limit etc. (Mehmed et al., 2019).
Type 5 monitors verify the safe operation and
health of the actuators. For example, verifying the hy-
draulic brake pressure is in desired range when brakes
are actuated.
In general aviation, a challenge in the introduc-
tion of commercial off-the-shelf (COTS) autopilot
systems in small aircrafts, that had the potential to
dramatically reduce the risk of accidents due to hu-
man error, was the high amount of cost and time in-
volved in traditional exhaustive design time verifica-
tion. In order to allow retro-fitment of COTS to small
aircrafts, runtime assurance systems (RTA) were in-
troduced (Hook et al., 2018). Similar to the sim-
plex architecture, RTA systems utilize runtime moni-
tors to verify safety critical system parameters of the
SuO during operation and trigger appropriate fail safe
mechanisms upon detection of an anomaly or mal-
function. RTA systems can be implemented at various
levels of system abstraction. For example, RTA can
be applied to a component that belongs to a larger sys-
tem such as a RTA system to monitor the performance
of an uncertified turbofan engine controller that es-
timates engine thrust with an optimal tuned kalman
filter (OTKF). Here, a runtime monitor is employed
to monitor critical engine parameters and trigger an
appropriate fallback mechanism, such as regulation
of fuel flow to prevent the engine from entering an
unsafe state (Schierman et al., 2018). Another ap-
proach involves functional decomposition of the sys-
tem into subsystems, where every subsystem is mon-
itored. Such a multi-monitor approach was used to
support certification of unmanned and autonomous
flight systems (Hook et al., 2018). Here multiple
runtime monitors, such as ground collision avoidance
system and no-fly zone avoidance geofence system
monitor ensure safe operation of a complex uncerti-
fied waypoint planning module. Every monitor evalu-
ated the safety of aircraft operation independently and
informed a higher level module called flight executive
upon detection or prediction of a breach of its safety
boundary to trigger an appropriate reversionary sys-
tem to bring the aircraft back to a safe state.
The American Society of Testing and Materials
(ASTM) describe approaches to safely bound the be-
haviour of aircraft systems containing complex func-
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
404
tions using RTA with detailed requirements for RTA
components, best practices and several example im-
plementations in the ASTM-F3269 standard (ASTM
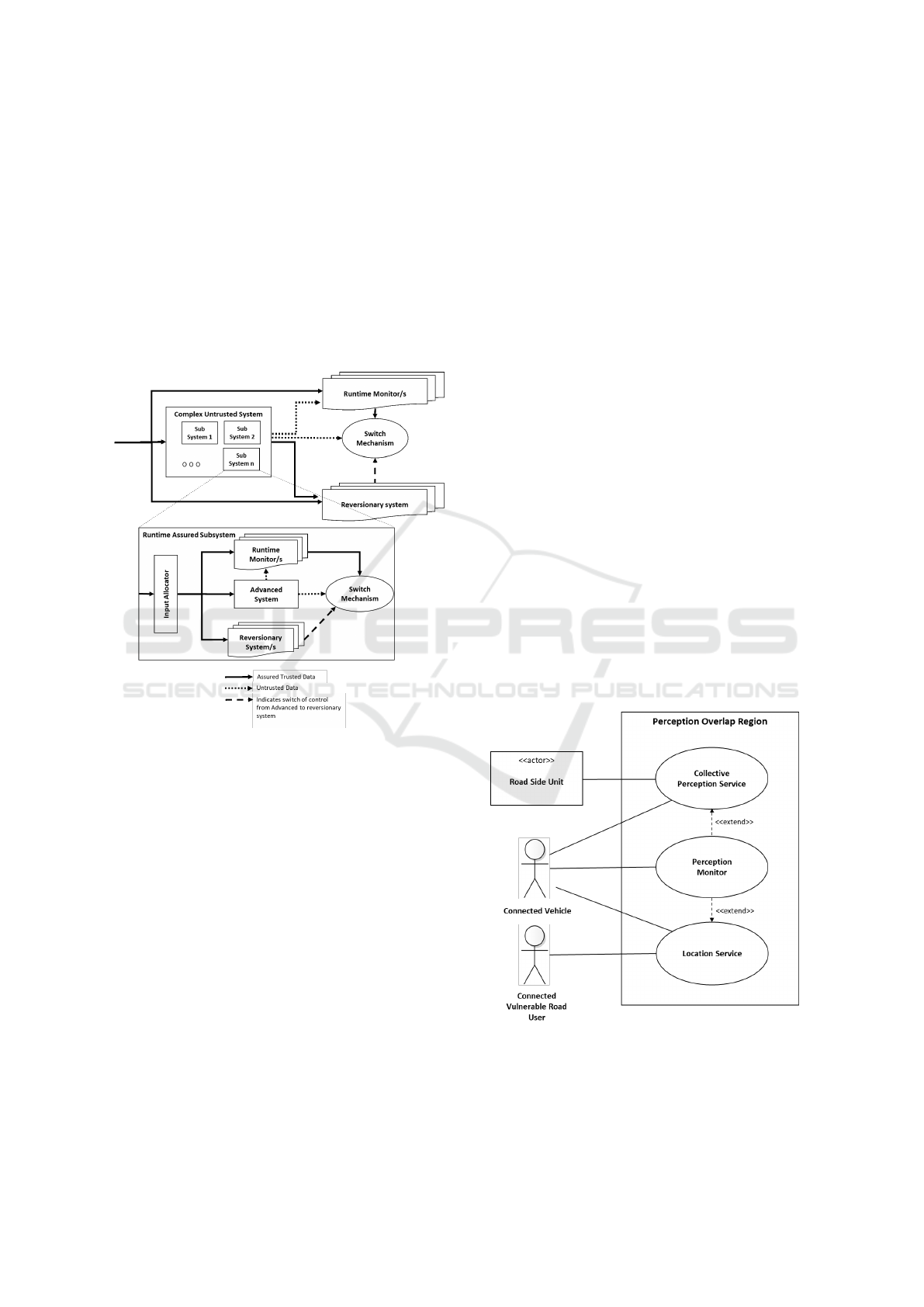
F3269-21, 2021). Figure 1 illustrates a nested RTA
approach described in ASTM F-3269, with runtime
monitors observing safety critical properties at differ-
ent levels of abstraction (sub-system level and system
level) for the introduction of machine learning based
components or modules into an aircraft. This ap-
proach allowed the introduction of complex systems
while relying on the fail safe RTA system to ensure
safety of the larger system.
Figure 1: A Nested RTA approach (adapted from ASTM-
F3269).
3 A RUNTIME MONITORING
APPROACH FOR ADS
PERCEPTION
In this section, we present a novel monitoring ap-
proach for ADS perception based on standardised
V2X services to supplement design time verification
and validation.
Typically, autonomous vehicles equipped with
V2X communication technology are referred to as
CAV (BSI Flex 1890, 2023). In general, CAV’s
are equipped with On-Board Units (OBU) that facili-
tate communication with other connected road users.
Similarly, vulnerable road users such as pedestrians
and bicyclists can be connected to and participate in
an ITS environment, for example via ITS applica-
tions on hand held devices. Another important par-
ticipant in the ITS ecosystem is the roadside ITS
station, which includes Road Capture Units (RCU)
and Road Side Units (RSU). RCUs comprise of in-
frastructure sensor clusters that observe road traffic.
RSUs provide the communication interface between
nearby CAVs and RCUs located at roadside (ETSI EN
302 665, 2010). For the purpose of the concept we re-
fer to Collective Perception Service (CPS) (ETSI TS
103 324, 2023) and Location Service (ETSI GS MEC
013, 2022) specified by the European Telecommu-
nications Standards Institute (ETSI). (ETSI TS 103
324, 2023) elaborates the various technical consider-
ations for the realization of the CPS such as the CPS
functional architecture, its interfaces in an ITS envi-
ronment, Collective Perception message (CPM) struc-
tures and CPM generation criteria. Similarly, (ETSI
GS MEC 013, 2022) facilitates the following func-
tions via the MEC Location Services as follows:
• Location retrieval i.e. location from connected
user is retrieved once per request.
• Location subscription i.e. location is retrieved
multiple times for each request (event based or pe-
riodic).
• Anonymous location report (to collect statistics).
• Location of a certain category of connected users.
For example, list of connected pedestrians associ-
ated with a specific MEC host.
• List of all connected vehicles that move in or out
of a specified location area.
Figure 2: Perception Monitor Use-case diagram.
Figure 2 refers to a use case diagram for the proposed
perception monitor. Here, the CAV and RSUs share
their perception information, such as objects detected
Connected Vehicle Perception Monitoring: A Runtime Verification Approach for Enhanced Autonomous Driving Safety
405

to other connected road participants via the CPS. Sim-
ilarly, using the location service, CAVs and connected
vulnerable road users transmit their location informa-
tion. The CPS and location services serve as inputs
to the perception monitor. Figure 3 illustrates the
concept of the ADS perception monitor. Consider a
road situation with n CAVs and k RSUs, where there
is an intersection or overlap of the perception range
of all mentioned connected participants. A road user
in this overlapped perception area would be detected
by n + k connected participants. The perception in-
formation of these individual connected participants
would be available via CPS. Furthermore, if the de-
tected road user is a connected participant, its location
information would additionally be available via the
location service. Using information from these multi-
ple design time verified perception systems, it would
be possible to estimate a CEM or common truth of the
situation on the road, which can be used as a reference
to evaluate the quality of individual CAV perception.
For example, false positive detections and false nega-
tive or missed detections can be identified during run-
time and be used to hand over control to fall back or
reversionary systems to assure safety of the CAV.
Figure 3: Concept of ADS Perception Monitor.
In order to evaluate the described concept, we pro-
pose the implementation as described in Figure 4. We
first simulate a complex road situation in a high fi-
delity simulator such as CARLA (Dosovitskiy et al.,
2017) or SILAB (Krueger et al., 2005). V2X mes-
sages such as CPM and location service messages can
then be generated from the perception and positioning
data for ever connected participant in the simulation.
The data can then be processed to simulate runtime
perception faults, such as a false negative detection.
Finally, CPM data from all connected participants
will be processed via a Perception Monitor module
that will first perform the task of estimating a common
environment model, which would include the task of
data association of objects perceived from various dif-
ferent sources, followed by sensor data fusion of as-
sociated objects. The estimated common environment
model can then be used to evaluate the quality of CPM
from every CAV in the scenario played out to detect
any performance deviations of the CAV perception.
4 PERCEPTION RUNTIME
SAFETY MONITOR DESIGN
ASPECTS
In this section, we discuss various open design aspects
and challenges for an ADS perception safety monitor
proposed in the previous section as follows:
1. Independence of a runtime monitor from the safety
critical SuO.
A typical requirement of RV techniques is the iso-
lation and independence of the runtime monitor
from the SuO. A runtime monitor must not change
the target system’s behaviour functionally, unless
the target has violated a specification. Similarly,
the RV system must not interfere with the target’s
timing (Pike et al., 2011). A possible solution to
monitor ADS perception is to offload RV func-
tions from the vehicle to infrastructure such as
MEC devices or cloud systems. Using V2X ser-
vices such as CPM and location services, percep-
tion information from the vehicle could be trans-
mitted to nearby infrastructure, where the per-
formance of the ADS perception could be mon-
itored while ensuring independence from SuO it-
self. While an off-vehicle approach can ensure in-
dependence of the monitor from the SuO in terms
of computational and power resources, it faces
challenges to achieve monitoring and fault detec-
tion with real time constraints. Alternatively, an
on-vehicle runtime monitor design would need to
ensure sufficient freedom of interference from the
SuO to ensure no consequential impact on the per-
formance of the SuO.
2. Trade off between observability and monitor inde-
pendence from the SuO.
Observability in the context of runtime monitor-
ing refers to availability of SuO parameters for
verification by the monitor (Francalanza et al.,
2017). An important consideration for an off-
vehicle monitoring approach would be availabil-
ity of observable system parameters. A runtime
monitor implemented on-vehicle could access and
observe a wider range of system parameters in
comparison to a monitor implemented off-vehicle,
which would be constrained to the system param-
eters observable via available V2X interfaces. On
the other hand, in order to ensure safety of the
system, it is necessary to ensure independence
of the monitor from the SuO in terms of time
and space partitioning. An on-vehicle runtime
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
406
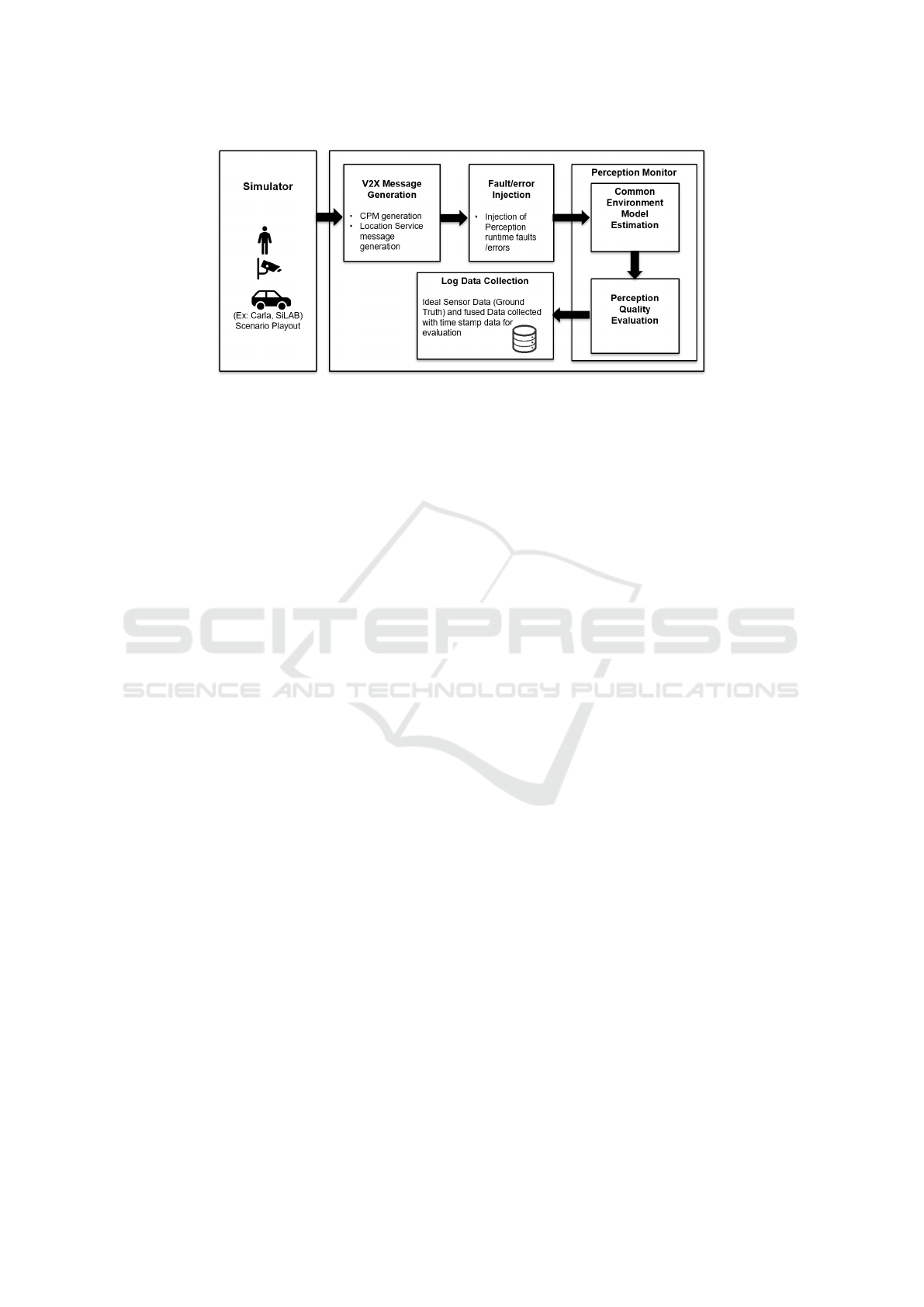
Figure 4: Proposed Implementation.
monitor implementation would have to deal with
constraints with respect to bandwidth and com-
putational resources necessary to handle the po-
tentially vast number of V2X messages, espe-
cially in a scenario with multiple connected par-
ticipants involved. A viable solution would be a
combination between on-vehicle and off-vehicle
runtime monitors, where on-vehicle monitors ob-
serve critical parameters or specification of the
system for violations or fault detection such as a
sensor health check,while an off-vehicle runtime
monitors observe performance parameters that are
difficult to observe or estimate with just an on-
vehicle approach.
3. Modelling uncertainty of inputs for correctness of
monitor.
A crucial requirement for a runtime monitor, es-
pecially in the context of a safety critical SuO, is
that the monitor must ensure a level of correctness
themselves (Bartocci et al., 2018). An important
consideration to ensure the correctness of a run-
time monitor is the quality of input data. For the
ADS perception monitor concept described, this
means that the correctness of the monitor depends
upon the quality of V2X information received.
Therefore, it is essential for the runtime monitor
to account for the inherent uncertainty of its in-
puts.
The CPS as specified in (ETSI TS 103 324, 2023)
makes provisions to quantify 3 types of uncer-
tainty in its message data structure: ObjectCon-
fidence (also called existence probability) for ev-
ery detected object that provide a measure of rel-
evance and quality of the detected object, Class
confidence for every detected object that provides
a confidence measure in the classification of the
detected object and a confidence measure for ev-
ery attribute in the CPM indicating the state of the
detected object, For example: the distance of a
detected object is provided with a distance confi-
dence attribute that indicates the accuracy of the
distance measured. For the correct functioning
of the perception runtime monitor, it is essential
that the source of the CPM, identifies and models
the these confidence measures to account the vari-
ous causal factors that contribute to uncertainty or
degradation of the source system, such as the pres-
ence or absence of adversial operating conditions,
measurement accuracy of sensor component etc.
An overview of approaches to bound risks stem-
ming from uncertainty in AV perception of its en-
vironment and relevant safety metrics to evaluate
the accuracy of uncertainty models is discussed in
(Benedikt et al., 2024).
4. Asynchronism and uncertainty due to latency.
Estimation of a CEM based on CPM demands
the requirement from the CEM estimation mod-
ule that CPM are processed asynchronously. Al-
though the clocks in the various connected par-
ticipants may be synchronized with GNSS time,
the tasks of sensor data acquisition, processing,
message generation and transmission are not syn-
chronous. As a result, the frequency and latency
of data arriving from every connected participant
may be different. An analysis of the various con-
tributing factors to delay in the collective percep-
tion chain including delays due to local perception
tasks, communication delays and collective per-
ceptions tasks are discussed in (Volk et al., 2021;
Pilz et al., 2023).
With larger latencies, information received is out-
dated and requires strategies such as model based
prediction to deal with the varying delays from
V2X messages, which may consequently intro-
duce uncertainty into the projected or predicted
data depending upon the accuracy of the model
employed. Consequently, such delays increase the
possibility of missed data associations and there-
Connected Vehicle Perception Monitoring: A Runtime Verification Approach for Enhanced Autonomous Driving Safety
407

fore lead to false positive or false negative mon-
itor outputs. With an asynchronous and offline
approach, V2X CPM can be analysed in an of-
fline fashion without having to deal with exces-
sive temporal alignment, thereby potentially im-
proving monitor false detections but deteriorating
the real time capability of the monitor. A possible
approach for an off-vehicle implementation could
include use of dedicated infrastructure sensors to
serve as primary inputs to the CEM . Additionally,
since the quality of data fusion output deteriorates
with the latency of its inputs, it might be benefi-
cial to limit input from vehicle sources based on
a threshold latency to improve the accuracy of the
CEM. However, such an approach could also lead
to exclusion of safety relevant inputs to the CEM,
thereby adversely affecting its performance.
5 CONCLUSION AND FUTURE
WORK
In this paper, we have discussed various approaches
for runtime verification of cyber-physical systems in
the context of different domains. Based on this,
we were able to introduce a promising approach for
runtime monitoring of ADS perception, which uses
V2X services such as CPM and location services to
continuously evaluate the perception performance of
CAVs during their operation. By actively monitoring
the system during operation, the proposed approach
could potentially detect anomalies, potential failures
and deviations from expected behaviour, enabling the
system to take corrective actions or warn the driver,
thus contributing to overall safety of the ADS opera-
tion. Furthermore, a reliable CEM estimation would
allow verification of the plan and act phases of ADS,
where the planned and executed trajectories could be
verified for violations or malfunctions during runtime
using the estimated CEM. We propose a first imple-
mentation to evaluate the concept using a simulation
framework. Our future work would focus on investi-
gating different approaches to model confidence mea-
sures for safety critical object information in the CPM
data structure while accounting for the various con-
tributing factors to uncertainty of perception informa-
tion.
ACKNOWLEDGEMENTS
This work was conducted within the Deutsches Zen-
trum f
¨
ur Luft und Raumfahrt (DLR) internal project
’VMo4Orte - Vernetze Mobilit
¨
at f
¨
ur lebenswerte
Orte’, which is funded by the German Federal Min-
istry for Economic Affairs and Climate Action.
REFERENCES
Anderson, J. M., Kalra, N., Stanley, K. D., Sorensen, P.,
Samaras, C., and Oluwatola, O. A. (2014). Au-
tonomous vehicle technology: A guide for policymak-
ers. Rand Corporation, Santa Monica CA.
ASTM F3269-21 (2021). Practice for methods to safely
bound flight behavior of unmanned aircraft systems
containing complex functions.
Barringer, H., Goldberg, A., Havelund, K., and Sen, K.
(2004). Rule-based runtime verification. In Steffen,
B. and Levi, G., editors, Verification, Model Check-
ing, and Abstract Interpretation, pages 44–57, Berlin,
Heidelberg. Springer Berlin Heidelberg.
Bartocci, E., Falcone, Y., Francalanza, A., and Reger, G.
(2018). Introduction to runtime verification. In Bar-
tocci, E. and Falcone, Y., editors, Lectures on run-
time verification, volume 10457 of Lecture Notes in
Computer Science, pages 1–33. Springer Berlin Hei-
delberg, New York NY.
Benedikt, M., B
¨
ode, E., Bossert, A., Braband, J., Brade,
T., Braun, N., Braun, T., Burton, S., Dallmann, T.,
Damm, W., D
¨
user, T., Elster, L., Fingscheidt, T.,
Fistler, M., Franek, M., Fr
¨
anzle, M., Freyer, J., Gal-
bas, R., Gansch, R., Geyer, D., Haas, L., Haider, A.,
Heidl, P., Hein, M., Heyl, A., Hiller, J., Hungar, H.,
Hutter, D., Jung, R., Klein, C., Kr
¨
uger, J., Kuhn, T.,
Langner, J., Maurer, M., Mayr, K., Meyer-Vitali, A.,
M
¨
ohlmann, E., Molin, A., M
¨
oller, B., Niehaus, J.,
Nolte, B., Nolte, M., Otten, S., Peleska, J., Peters,
S., Poguntke, T., Poprawa, P., Reich, J., Rosenberger,
P., Schick, B., Schneider, D., Schneider, S.-A., Schyr,
C., Thomas, C., Trapp, M., Wagner, F., Wagener, N.,
Woopen, T., and Zeh, T. (2024). Controlling Risk for
Highly Automated Transportation Systems Operating
in Complex Open Environments: A white paper of the
SafeTRANS Closing the Gap Initiative.
BSI Flex 1890 (04.2023). Bsi flex 1890 v5.0 connected and
automated mobility - vocabulary.
Chen, F. and Ros¸u, G. (2007). Mop: An efficient and
generic runtime verification framework. New York,
NY, USA. Association for Computing Machinery.
Chen, X., Feng, J., Hiller, M., and Lauer, V. (2007).
Application of software watchdog as a dependabil-
ity software service for automotive safety relevant
systems. In 37th Annual IEEE/IFIP International
Conference on Dependable Systems and Networks
(DSN’07), pages 618–624.
Delgado, N., Gates, A., and Roach, S. (2004). A taxon-
omy and catalog of runtime software-fault monitoring
tools. IEEE Transactions on Software Engineering,
30(12):859–872.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). CARLA: An open urban driving
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
408

simulator. In Proceedings of the 1st Annual Confer-
ence on Robot Learning, pages 1–16.
ETSI EN 302 665 (2010). ETSI EN 302 665 - V1.1.1 Intel-
ligent Transport Systems (ITS); Communications Ar-
chitecture.
ETSI GS MEC 013 (2022). ETSI GS MEC 013 - V2.2.1 -
Multi-access Edge Computing (MEC); Location API.
ETSI TS 103 324 (2023). ETSI TS 103 324 - V2.1.1 - In-
telligent Transport System (ITS); Vehicular Commu-
nications; Basic Set of Applications; Collective Per-
ception Service; Release 2.
Francalanza, A., Aceto, L., Achilleos, A., Attard, D. P.,
Cassar, I., Della Monica, D., and Ing
´
olfsd
´
ottir, A.
(2017). A foundation for runtime monitoring. volume
10548, pages 8–29.
Hermanns, H., Biewer, S., D’Argenio, P. R., and K\”ohl,
M. A. (2018). Verification, testing, and runtime moni-
toring of automotive exhaust emissions. In Barthe, G.,
Sutcliffe, G., and Veanes, M., editors, LPAR-22. 22nd
International Conference on Logic for Programming,
Artificial Intelligence and Reasoning, volume 57 of
EPiC Series in Computing, pages 1–17. EasyChair.
Hook, L. R., Skoog, M., Garland, M., Ryan, W., Sizoo, D.,
and VanHoudt, J. (2018). Initial considerations of a
multi-layered run time assurance approach to enable
unpiloted aircraft. In 2018 AIAA Guidance Navigation
and Control Conference Kissimmee Florida.
Koopman, P. (2011). Challenges In Representing CPS
Safety.
Koopman, P. and Wagner, M. (2016). Challenges in au-
tonomous vehicle testing and validation. SAE Interna-
tional Journal of Transportation Safety, 4(1):15–24.
Krueger, H., Grein, M., Kaußner, A., and Mark, C. (2005).
Silab—a task oriented driving simulation.
Leucker, M. and Schallhart, C. (2009). A brief account of
runtime verification. Journal of Logic and Algebraic
Programming, 78(5):293–303.
Mehmed, A. (2020). Runtime Monitoring for Safe Auto-
mated Driving Systems, volume 324 of M
¨
alardalen
University Press Dissertations. M
¨
alardalen Univer-
sity, V
¨
aster
˚
as.
Mehmed, A., Antlanger, M., and Steiner, W. (2020). The
monitor as key architecture element for safe self-
driving cars. In 2020 50th Annual IEEE-IFIP In-
ternational Conference on Dependable Systems and
Networks-Supplemental Volume (DSN-S), pages 9–12.
Mehmed, A., Steiner, W., Antlanger, M., and Punnekkat, S.
(2019). System architecture and application-specific
verification method for fault-tolerant automated driv-
ing systems. In 2019 IEEE Intelligent Vehicles Sym-
posium (IV), pages 39–44.
Nelissen, G., Pereira, D., and Pinho, L. M. (2015). A novel
run-time monitoring architecture for safe and efficient
inline monitoring. In de La Puente, J. A. and Var-
danega, T., editors, Reliable Software Technologies -
Ada-Europe 2015, Programming and Software Engi-
neering, pages 66–82, Cham. Springer International
Publishing and Imprint: Springer.
Nitsche, G., G
¨
orgen, R., Gr
¨
uttner, K., and Nebel, W. (2017).
Structural contracts – motivating contracts to ensure
extra-functional semantics. In G
¨
otz, M., Schirner, G.,
Wehrmeister, M. A., Al Faruque, M. A., and Rettberg,
A., editors, System Level Design from HW/SW to
Memory for Embedded Systems, pages 77–87, Cham.
Springer International Publishing.
Pike, L., Niller, S., and Wegmann, N. (2011). Runtime ver-
ification for ultra-critical systems. In Runtime Verifi-
cation.
Pilz, C., Sammer, P., Piri, E., Grossschedl, U., Steinbauer-
Wagner, G., Kuschnig, L., Steinberger, A., and Schrat-
ter, M. (2023). Collective perception: A delay evalu-
ation with a short discussion on channel load. IEEE
Open Journal of Intelligent Transportation Systems,
4:506–526.
Rahmani, M., Hintermaier, W., Muller-Rathgeber, B., and
Steinbach, E. (2007). Error detection capabilities
of automotive network technologies and ethernet - a
comparative study. In 2007 IEEE Intelligent Vehicles
Symposium, pages 674–679.
SAE Standard J3016 (2021). Taxonomy and definitions for
terms related to driving automation systems for on-
road motor vehicles.
Sankavaram, C., Kodali, A., and Pattipati, K. (2013). An
integrated health management process for automotive
cyber-physical systems. In 2013 International Confer-
ence on Computing, Networking and Communications
(ICNC), pages 82–86.
Sasikumar, C., Agrawal, R., Gupta, S., Gupta, S., and Ma-
heshwari, R. (2011). Built in self-test for fault tol-
erant real time in-vehicle networks through automo-
tive diagnostics. In 2011 International Conference on
Emerging Trends in Networks and Computer Commu-
nications (ETNCC), pages 379–382.
Schierman, J. D., Neal, D., Wong, E., and Chicatelli, A. K.
(2018). Runtime assurance protection for advanced
turbofan engine control. In 2018 AIAA Guidance Nav-
igation and Control Conference Kissimmee Florida.
January 08-12 2018.
Sha, L. (2001). Using simplicity to control complexity.
IEEE Software, 18(4):20–28.
UL 4600 (2022). UL 4600: Standard for evaluation of au-
tonomous products.
Volk, G., Delooz, Q., Schiegg, F. A., Von Bernuth, A., Fes-
tag, A., and Bringmann, O. (2021). Towards realistic
evaluation of collective perception for connected and
automated driving. In 2021 IEEE International In-
telligent Transportation Systems Conference (ITSC),
pages 1049–1056.
Connected Vehicle Perception Monitoring: A Runtime Verification Approach for Enhanced Autonomous Driving Safety
409
