
Leveraging Temporal Context in Human Pose Estimation: A Survey
Dana Skorvankova
a
and Martin Madaras
b
Department of Applied Informatics, Comenius University, Bratislava, Slovakia
Keywords:
Human Pose Estimation, Temporal Context, Point Clouds, Visual Transformer, Deep Learning.
Abstract:
Human pose estimation, the task of localizing skeletal joint positions from visual data, has witnessed signif-
icant progress with the advent of machine learning techniques. In this paper, we explore the landscape of
deep learning-based methods for human pose estimation and investigate the impact of integrating temporal
information into the computational framework. Our comparison covers the evolution from methods based on
Convolutional Neural Networks (CNNs) to recurrent architectures and visual transformers. While spatial in-
formation alone provides valuable insights, we delve into the benefits of incorporating temporal information,
enhancing robustness and adaptability to dynamic human movements. The surveyed methods are adapted to fit
the requirements of human pose estimation task, and are evaluated on a real large scale dataset, focusing on a
single-person scenario, inferring from 3D point cloud inputs. We present results and insights, showcasing the
trade-offs between accuracy, memory requirements, and training time for various approaches. Furthermore,
our findings demonstrate that models relying on attention mechanisms can achieve competitive outcomes in
the realm of human pose estimation within a limited number of trainable parameters. The survey aims to pro-
vide a comprehensive overview of machine learning-based human pose estimation techniques, emphasizing
the evolution towards temporally-aware models and identifying challenges and opportunities in this rapidly
evolving field.
1 INTRODUCTION
Human pose estimation is a task of localizing skeletal
joints positions of a person’s body from visual data.
It has witnessed remarkable progress in recent years,
primarily driven by the growth of machine learning
techniques. In this paper, we explore the landscape
of deep learning-based methods employed for human
pose estimation and delve into the impact and poten-
tial benefits offered by the integration of temporal in-
formation into the computational framework.
The field of pose estimation has transitioned from
traditional computer vision methods to more sophisti-
cated approaches, with deep learning at its core. Con-
volutional Neural Networks (CNNs), recurrent archi-
tectures, and attention mechanisms have emerged as
pivotal tools, demonstrating unprecedented capabil-
ities in capturing intricate spatial relationships and
contextual dependencies within visual data.
While spatial information alone provides valuable
insights into the pose of an individual, the temporal
dimension introduces a new layer of understanding.
a
https://orcid.org/0000-0003-3791-495X
b
https://orcid.org/0000-0003-3917-4510
Human movements are inherently dynamic, and cap-
turing the temporal evolution of poses adds crucial
context to the analysis. In this context, we explore the
benefits of incorporating temporal information into
pose estimation models. Temporal integration not
only improves the robustness of pose predictions but
also facilitates the recognition of complex actions and
behaviors, making these models more adaptable to
real-world scenarios where human activities unfold
dynamically.
This survey aims to provide a comprehensive
overview of the recent developments in deep learning-
based human pose estimation techniques and their
evolution toward temporally-aware models. By ex-
amining the current state-of-the-art methods and the
advantages gained through temporal integration, we
aim to offer insights into the challenges and opportu-
nities that lie ahead in this dynamic and rapidly evolv-
ing field. The main contributions of this paper are as
follows:
(1) Our experimental findings hold significant
practical implications. With our experiments, we fill
the gap in existing research by identifying the direct
impact of temporal context incorporation on the ac-
Skorvankova, D. and Madaras, M.
Leveraging Temporal Context in Human Pose Estimation: A Survey.
DOI: 10.5220/0012696800003720
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 4th International Conference on Image Processing and Vision Engineering (IMPROVE 2024), pages 83-90
ISBN: 978-989-758-693-4; ISSN: 2795-4943
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
83

curacy and robustness of pose estimation. Thus, our
research provides valuable guidance for the devel-
opment of more effective and reliable applications.
These insights can inform the design and implemen-
tation of practical solutions, enhancing the real-world
performance of pose estimation systems across vari-
ous domains.
(2) We systematically optimized various existing
approaches that leverage diverse techniques for pro-
cessing sequential data. Focusing specifically on the
task of human pose estimation, we fine-tuned and
enhanced these methodologies to achieve superior
performance, and evaluate them on real 3D human
dataset.
(3) In our experiments, we demonstrate that visual
transformers elevate the field of pose estimation and
improve the accuracy of both single-frame and tempo-
ral predictions. Attention-based strategies emerge as
the optimal type of deep learning tool for achieving
precise, robust, and efficient human pose estimation
applications.
2 RELATED WORK
The domain of pose estimation has experienced rapid
evolution, transitioning from CNN-based techniques
to the integration of vision transformers. Early efforts
in human pose estimation concentrated on single-
frame analysis utilizing CNNs (Mehta et al., 2020;
Mehta et al., 2017; Sun et al., 2019). Techniques like
OpenPose (Cao et al., 2021) and AlphaPose (Fang
et al., 2017) extended CNN approaches to handle
scenarios involving multiple individuals, marking the
advent of multi-person pose estimation. Moreover,
CNN-based methods have played a crucial role in
advancing 3D pose estimation, facilitating the pre-
diction of three-dimensional human poses from 2D
keypoints through techniques such as lifting from
2D to 3D (Kang et al., 2023; Nie et al., 2023).
To address the issue of temporally incoherent esti-
mates when dealing with individual frames, in recent
years, human pose estimation has undergone sub-
stantial progress, emphasizing the significance of in-
corporating temporal context for a more comprehen-
sive understanding of human motion. The integra-
tion of temporal context into pose estimation has ad-
vanced notably, showcasing innovations in recurrent
neural networks (Artacho and Savakis, 2020; Hos-
sain and Little, 2018) and graph-based methods (Li
et al., 2022; Wu and Shi, 2023; Yang et al., 2021) to
enable accurate and robust tracking of human move-
ments over time.
Recent strides in the field of temporal pose es-
timation involve the integration of attention mecha-
nisms and transformers into pose estimation architec-
tures (Liu et al., 2020; Tang et al., 2023). Vision trans-
formers (Dosovitskiy et al., 2021; Liu et al., 2021)
have gained prominence for their global context cap-
turing capabilities, yielding improvements in both 2D
and 3D human pose estimation (Zheng et al., 2021).
The attention mechanisms in transformers facilitate
the consideration of long-range dependencies among
keypoints, enhancing accuracy. However, many ex-
isting transformer-based methods typically follow a
two-stage process, involving intermediate 2D pose
estimation that is subsequently lifted into 3D (Ein-
falt et al., 2023; Li et al., 2023; Zhao et al., 2023).
These approaches are constrained not only by the pre-
cision of the initial 2D joint positions but also by chal-
lenges related to self-occlusions and ambiguities aris-
ing from the absence of depth information.
In this survey paper, we aim to explore numer-
ous end-to-end strategies including recurrent, graph-
based and attention-based methods, which eliminate
the need for two separate networks for estimating 2D
and 3D poses in distinct stages. We avoid the ambi-
guities related to 2D input representations in our re-
search. Instead, the focus is on single-stage tempo-
ral pose estimation approaches directly estimating 3D
poses from 3D input data. Specifically, we use un-
organized point clouds, as it is the most widely used
and straightforward 3D data format. Despite its rel-
atively sparse structure, it allows us to extract all the
important information without requiring an exhaus-
tive number of model parameters.
3 EXAMINED METHODS
Within our research, we have implemented various
pose estimation methods and refinement strategies in-
corporating temporal information, following the lat-
est trends in the field. All of the models presented
below were implemented by us, inspired by existing
methodologies.
3.1 Single-Frame Methods
To adequately evaluate the impact of the temporal
context, we also performed experiments with single-
frame pose estimation networks. They represent base-
line methods, which we aim to further improve using
the spatio-temporal approaches.
IMPROVE 2024 - 4th International Conference on Image Processing and Vision Engineering
84
3.1.1 Baseline Pose Estimation
As our baseline single-frame pose estimation method,
we established a simple MLP-based network, with a
PointNet(Qi et al., 2017)-like architecture. The model
takes a set of unordered 3D points as input and ap-
plies a shared multi-layer perceptron (MLP) to each
point independently, capturing local features. Then,
the per-point features are aggregated using max pool-
ing to obtain global features across the whole data
sample. The model directly outputs the 3D joint co-
ordinates of the human skeleton.
3.1.2 Segmentation-Guided Pose Estimation
We also include somewhat advanced single-frame
pose estimation approach (
ˇ
Skorv
´
ankov
´
a and Madaras,
2021) for the comparison. It consists of a two-stage
pipeline. The first stage involves an auxiliary seg-
mentation network that classifies points of a point
cloud representing a human pose into corresponding
body regions. In the second stage, the original in-
put point cloud is concatenated with the output re-
gions from the segmentation network, forming a four-
channel point cloud input. This data, preserving both
local and global information, is then fed into the sec-
ond model—the regression network, where joint co-
ordinates are regressed. The second model is essen-
tially the same as our baseline pose estimation net-
work. In both stages of the approach, residual connec-
tions are used in shared multi-layer perceptron blocks
to enhance feature propagation.
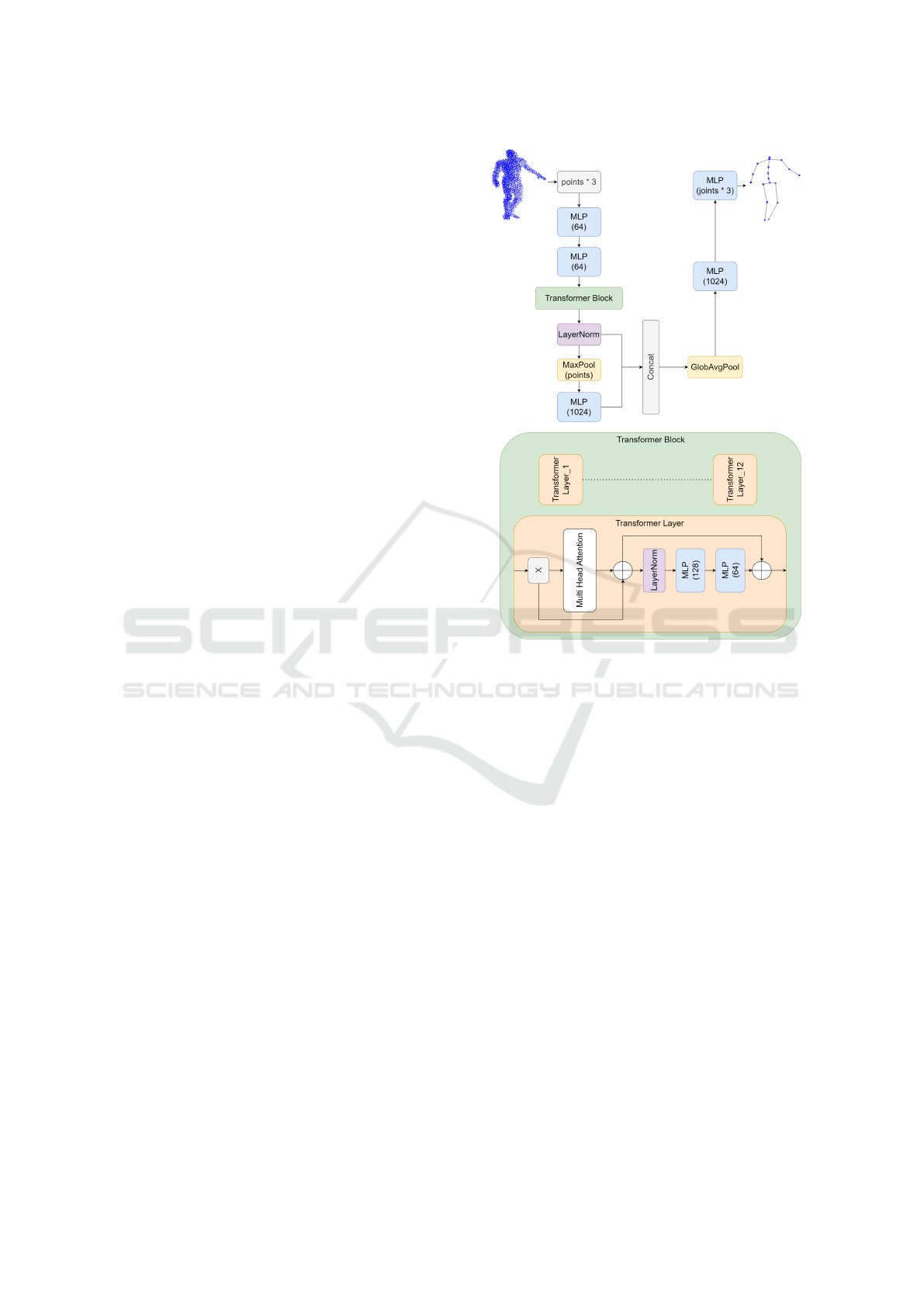
3.1.3 Attention-Based Pose Estimation
In response to the current prominence of attention-
based methods, we introduce an additional single-
frame pose estimation approach denoted as Points in
Transformer (PoinT). We incorporate both local and
global feature processing for input point clouds in our
architecture. This involves concatenating per-point
features, initially extracted, with globally aggregated
features spanning the entire point cloud. This can also
be formulated as introducing the attention mechanism
to the traditional PointNet, as we find it the most ef-
fective strategy to process point clouds. The diagram
of our PoinT architecture is illustrated in Figure 1.
3.2 Temporal Methods
3.2.1 Pose Refinement Approaches
A portion of the spatio-temporal methods employs
initially estimated human poses, inferred from a sin-
gle frame. These poses are subsequently smoothed
Figure 1: The architecture of PoinT model. Each MLP in-
cludes GELU activation and layer normalization. Numbers
in brackets indicate number of units.
and refined by incorporating temporal context, involv-
ing the consideration of the sequence of surround-
ing frames during computation. Mainly, we used this
strategy when the particular method required point-
to-point correspondence within subsequent frames,
a characteristic not inherent in unorganized point
clouds.
Temporal Convolutions. First strategy we tested to
refine initial single-frame pose predictions is using
temporal convolutions (Lea et al., 2017; Pavllo et al.,
2019; Chao et al., 2023). Unlike spatial convolu-
tions that focus on spatial relationships within a sin-
gle frame, temporal convolutions consider the tempo-
ral evolution of poses, recognizing the importance of
motion dynamics for a comprehensive understanding
of human actions. The size of the temporal kernel de-
termines the extent of the temporal context taken into
account. For our task, we also employ dilated tempo-
ral convolution kernels to extend the receptive field in
time without increasing the number of model param-
eters. However, for the convolution across the tempo-
ral axis to be sensible, the point-to-point correspon-
Leveraging Temporal Context in Human Pose Estimation: A Survey
85

dence between frames has to be maintained across
the whole sequence of motion. In previous papers,
temporal convolutions were applied either to 1D input
representing joint locations, or 2D input images, both
serving as organized data structures. Since we employ
unorganized 3D point clouds as input, we use the tem-
poral convolution approach only for fine-tuning the
initially predicted single-frame poses.
Sequence-to-Sequence Modelling. Another ap-
proach we have included in our survey is using an ar-
chitecture based on sequence-to-sequence modelling
inspired by Hossain et al. (Hossain and Little, 2018).
The model employs LSTM modules which are inter-
connected in an encoder-decoder fashion. We use this
type of network, again, to refine the initially estimated
3D human poses using the preceding frames in the
sequence. The technique could not be used directly
on sequences of input point clouds, since the frame-
to-frame correspondence is missing in the unordered
data structure.
3.2.2 End-to-End Approaches
The other part of our experiments focus on direct ap-
proaches, which take a sequence of unordered point
clouds as input, and learn to estimate 3D joint loca-
tions of the tracked person for the reference frame.
Temporal Dynamic Graph CNN. One of the end-
to-end strategies we have experimented with is us-
ing a dynamic graph convolutional neural network
(DGCNN) inspired by Wang et al. (Wang et al., 2019).
The original model proposed in the paper was em-
ployed to address high-level tasks on single-frame
point clouds. The network is based on graph convo-
lutions, hence representing the point cloud as a graph
structure, dynamically updating the graph in-between
layers. The so-called EdgeConv operation consists
of computing per-point features by applying a multi-
layer perceptron (MLP), constructing a graph based
on nearest neighbors in the feature space, and pooling
among the neighboring edge features. The main con-
tribution of the approach is the suggestion to recom-
pute the graph after each MLP, based on inter-point
distances in feature space.
We adopted the idea of dynamic graph convolu-
tions and took it further by designing a Temporal
DGCNN, incorporating the dynamic graph topology
into our pose estimation (SGPE) regression network.
The proposed architecture is depicted in Figure 2. As
illustrated in the figure, we feed a sequence of point
clouds into the model and concatenate the global per-
frame features before feeding them to the bottleneck
to regress the 3D joint coordinates of the last (refer-
ence) frame.
PointLSTM. Another strategy we examined and
implemented is LSTM model directly processing un-
ordered point clouds, following the research of Min et
al. (Min et al., 2020). Originally, this strategy was ap-
plied to solve the task of gesture recognition, however
we aim to utilize the approach to track human body.
We acquired the per-point internal states within the
LSTM. For each point of the point cloud, the hidden
states are updated by aggregating relative features of
its K nearest neighboring points in the previous frame.
Following the original paper, we integrated
PointLSTM into a modified FlickerNet architec-
ture (Min et al., 2019), replacing one of the network
intermediate layers by the PointLSTM module. The
architecture consists of five subsequent modules. In
the first stage, intra-frame features are extracted us-
ing spatial neighborhood grouping. In the second to
fourth stages, inter-frame features are extracted with
spatial-temporal grouping, and the point clouds are
sub-sampled using density-based sampling between
two neighboring inter-frame layers. We are experi-
menting with three distinct models based on which
layer is replaced by PointLSTM: (1) PointLSTM-
early, (2) PointLSTM-middle, and (3) PointLSTM-
late. The three inter-frame layers in the Flicker-
Net are replaced, respectively, to examine how well
the LSTM can extract important features at various
stages.
4 EVALUATION
4.1 Benchmark Data
Within our experiments, we use the CMU Panoptic
dataset (Joo et al., 2017) to train and test the models
described above. It is currently the only large-scale
dataset containing multi-modal data capturing real
human subjects interacting in various scenarios. For
the sake of our research, we employ the portion of the
dataset that focuses on a single person in the scene,
marked as Range of motion. It includes over 2 hours
of recordings, which yields over 141,000 frames in
total. Since prior to our work, there was no protocol
established for the utilized section of the dataset and
the stated task, and considering the amount of data
present in the selected part of the dataset, we split the
data to train and test set with 70:30 ratio.In the pre-
processing steps, the sequences are further sliced to
generate input sequences for the particular methods.
We initially sub-sampled all the point clouds to 512
IMPROVE 2024 - 4th International Conference on Image Processing and Vision Engineering
86
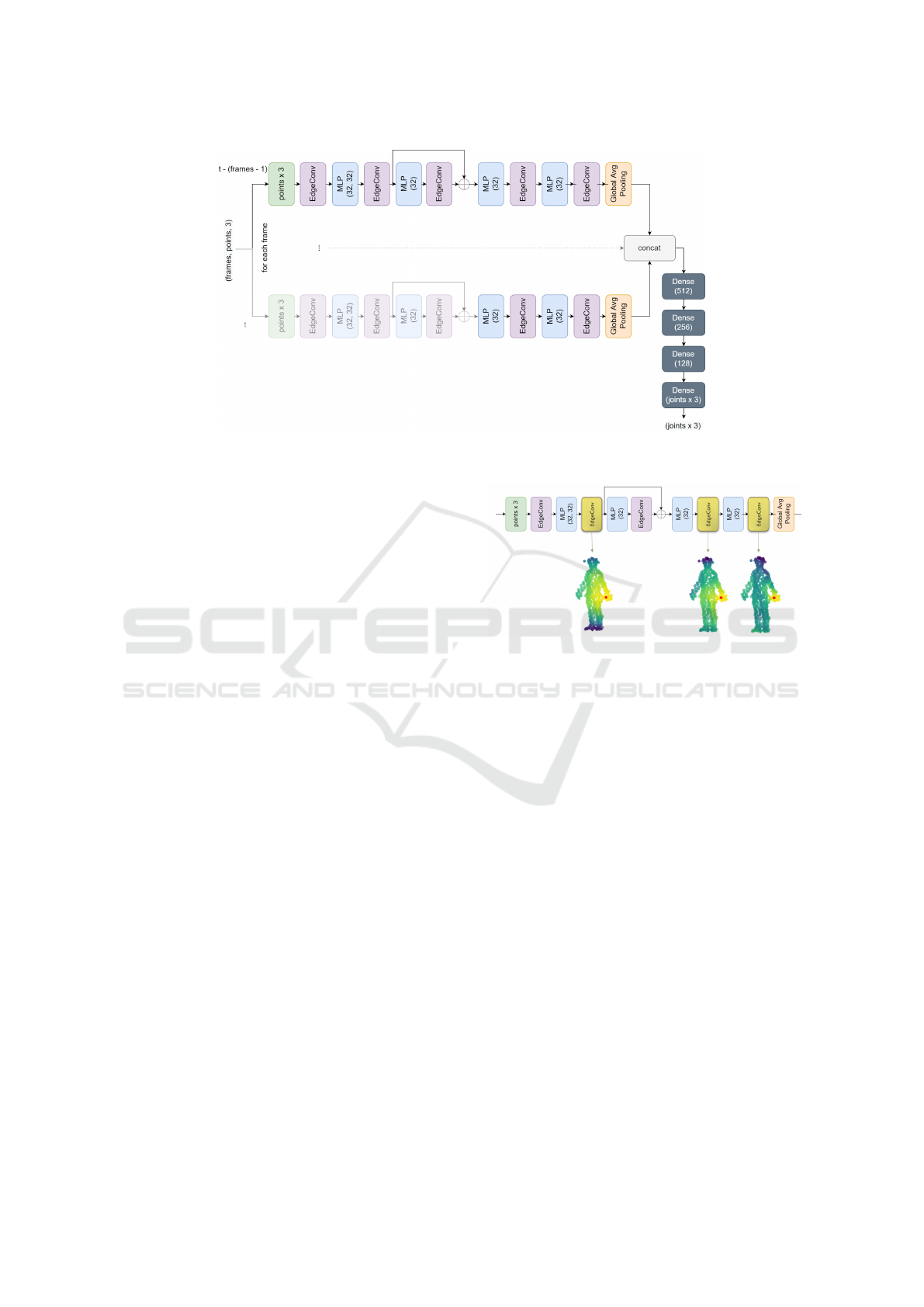
Figure 2: The proposed architecture of Temporal DGCNN. EdgeConv layer composes of the graph recomputation and max
aggregation of the neighboring features.
points using farthest point sampling (FPS), and then
decreased this size even further in some of the meth-
ods, as indicated in the next section.
4.2 Results
Following the temporal convolution strategy, after an
extensive number of experiments, we obtained the
best results with a simple model, which convolves
across sequences of 9 frames at a time. The input
sequences of initial 3D pose estimations in our exper-
iments are produced by our baseline model, SGPE,
and PoinT network, as described in Section 3.1. Fur-
thermore, we validated both symmetric and causal
temporal convolution settings. Symmetric convolu-
tion means the reference frame is located in the cen-
tre of the input sequence, while causal convolution
only has access to past frames. We can conclude from
the results shown in Table 1, as well as in Figure 4,
that fine-tuning the single-frame pose estimations us-
ing temporal convolutions increases the accuracy of
all of the single-frame models we have experimented
with.
Regarding the sequence-to-sequence LSTM net-
work, we preserved the original number of 1024 units
inside the LSTM cell on both encoder and decoder
side. We have also tested multi-layered decoder con-
sisting of multiple sequentially chained LSTM cells,
however our best results were achieved with just one
layer for both encoder and decoder. Based on the
results (as shown in Table 1), we may conclude the
accuracy of our single-frame pose estimation is al-
ready high, and may not be largely affected by out-
liers caused by time-inconsistent predictions. Hence,
the sequence-to-sequence refinement does not lower
Figure 3: Structure of the feature space produced at differ-
ent layers of the Temporal DGCNN. The distance in feature
space from the red point to all the other points in the point
cloud is visualized.
the mean error, however slightly increases the mean
average precision of the estimations. The reported re-
sults were achieved using the input sequence length
of 5 frames, same as in (Hossain and Little, 2018);
with the temporal loss incorporated into the training
process. Temporally computed loss means the er-
ror is calculated not only against the reference frame
ground truth, but also against the previous frames
from the sequence. The further from the reference
frame it is located in the sequence, the lower weight is
assigned to the loss computed from that ground truth
pose. Using a simple mean absolute error as a loss
function yielded the mean per joint position error of
approximately 2.43 cm, whilst incorporating the tem-
poral loss it has slightly decreased to 2.38 cm.
During the experiments, we have also validated
the hyper-parameters of the Temporal DGCNN, such
as the number of nearest neighbors used while con-
structing the graph, the input sequence length, and the
input point clouds resolution. We obtained the best
results using 20 neighboring points in EdgeConv, se-
quence length of 5 frames with stride 2 (taking every
Leveraging Temporal Context in Human Pose Estimation: A Survey
87
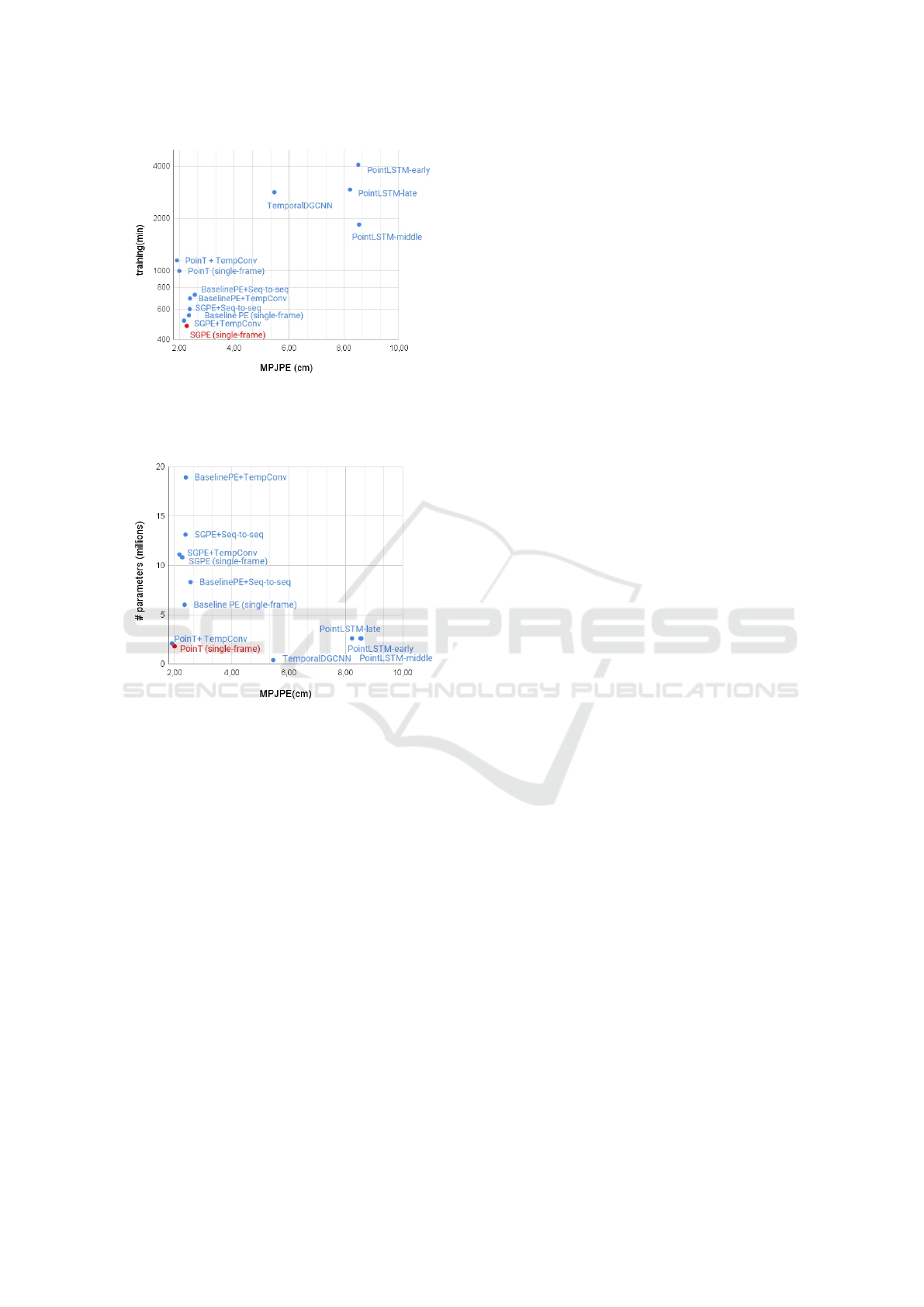
Figure 4: Comparison of mean per joint position error
(MPJPE) and training time of the evaluated approaches.
The method with the most favorable trade-off is the one lo-
cated closest to the bottom-left corner.
Figure 5: Comparison of mean per joint position error
(MPJPE) and overall number of parameters of the evalu-
ated models. The method with the most favorable trade-off
is the one located closest to the bottom-left corner.
second frame from a sequence of 10 frames), and the
point clouds initially down-sampled to 256 points us-
ing FPS. Moreover, we visualize the feature spaces
produced at different stages of the network on a sam-
ple human body point cloud (Figure 3). We can ob-
serve, that in the particular case depicted in the figure,
the point within the left hand is learnt to be gradually
distinguished from the rest of the body, since the hand
tends to move somewhat independently from the body
core and the other limbs.
We can infer from the results that the Temporal
DGCNN does not reach the accuracy of the single-
frame pose estimation. Despite the small number of
trainable parameters within the model, the training
procedure is rather time consuming, mainly due to the
graph re-computations after each layer. Also, since
the original DGCNN was proposed to process generic
objects, certain symmetry was usually present in the
point cloud structure; whereas the complex structure
of human poses is often asymmetrical and might pose
a more complicated problem.
Next part of our experiments was focused on point
cloud-processing LSTM model. We report pose esti-
mation results of the PointLSTM-early, middle and
late, following the original paper (Min et al., 2020),
replacing different layers of the modified FlickerNet
by the PointLSTM layer. After validation, we fixed
the number of nearest neighbors for each point in the
network to 16. To control the computational costs, we
perform random sub-sampling of the point clouds to
256 points before feeding it to the model during train-
ing, and uniform sampling is applied when testing the
model (same as in the original paper). We use the in-
put sequence length of 8 frames, mostly due to limited
computational resources. Also, we maintain the ap-
proach from the original paper, and assign the number
of each frame within the input sequence as a fourth
feature channel of each point of a point cloud. We
trained all PointLSTM models for 50 epochs, while
one epoch takes approximately 1 to 1.5 hour on a sin-
gle Quadro RTX 4000. Lowest errors reached for the
PointLSTM-early, middle and late are listed in Ta-
ble 1. In spite of PointLSTM architectures keeping
a relatively small amount of model parameters, the
overall training time significantly exceeds that of the
two-stage refinement approaches. Furthermore, for
the accuracy to be competitive compared to the other
tested methods, the PointLSTM model would likely
need further adjustments to capture the complexity of
human poses in motion, or the hardware resources for
the experiments would need to be much larger.
We visualize the trade-off between mean per joint
position error (MPJPE) and overall training time of
the methods in Figure 4. Depending on the specific
application environment, different approaches might
be considered optimal. While the temporal convo-
lution refinement yields the best test accuracy when
applied to the transformer model, it also slightly in-
creases the time requirements of the learning pro-
cess. All in all, the models inferring pose from a
single frame are deemed the most universal, as they
exhibit the most favorable trade-off between accuracy
and memory or time requirements. However, in spe-
cific scenarios where precision is considered the high-
est priority, temporal convolutions should be used to
fine-tune the initial single-frame estimations. On the
other hand, if the highest priority is given to memory
requirements or computational complexity, the single
frame transformer model, or even the temporal dy-
namic graph CNN represents a well-designed solution
as it achieves sufficient accuracy with a small number
of parameters in the model.
IMPROVE 2024 - 4th International Conference on Image Processing and Vision Engineering
88
Table 1: Quantitative results of implemented methods. Mean per joint position error (MPJPE) and mean average precision at
10 cm threshold (mAP@10) are reported as evaluation metrics. Symmetric indicates the reference frame is in the middle of
the input sequence. Whole training time of all models within the particular method is shown (in minutes). The total number
of trainable parameters is in millions.
Method symmetric MPJPE mAP@10 training # params
(cm) (%) (min)
Baseline PE (single-frame) - 2.35 97.80 553 6.0M
SGPE (single-frame) - 2.27 98.40 480 10.8M
PoinT (single-frame) - 2.00 98.65 995 1.8M
Baseline PE + TempConv no 2.39 98.13 691 18.9M
Baseline PE + TempConv yes 2.39 98.16 691 18.9M
SGPE + TempConv no 2.17 98.47 563 23.7M
SGPE + TempConv yes 2.17 98.48 515 11.1M
PoinT + TempConv no 1.95 98.68 1140 2.1M
PoinT + TempConv yes 1.91 98.71 1145 2.1M
Temporal DGCNN no 5.64 90.56 2832 0.4M
Temporal DGCNN yes 5.46 91.19 2832 0.4M
Baseline PE + Seq-to-seq no 2.56 98.08 725 8.3M
SGPE + Seq-to-seq no 2.38 98.53 600 13.1M
PointLSTM-early no 8.52 76.27 4074 2.6M
PointLSTM-middle yes 8.55 76.59 1842 2.6M
PointLSTM-late no 8.49 76.73 2676 2.6M
PointLSTM-late yes 8.22 77.91 2930 2.6M
5 CONCLUSIONS
This paper comprehensively explores the landscape
of deep learning-based methods for human pose es-
timation, with a specific focus on the integration of
temporal information. The survey covers the evolu-
tion from traditional methods to advanced techniques
based on convolutional neural networks, recurrent ar-
chitectures, and attention mechanisms. The incorpo-
ration of temporal context is investigated for its im-
pact on robustness and adaptability to dynamic hu-
man movements. The experimental findings pro-
vide valuable insights into the performance of vari-
ous models. The single-frame pose estimation mod-
els, including the baseline model, SGPE, and PoinT,
demonstrate high accuracy with competitive evalua-
tion metrics. The introduction of temporal convo-
lutions for refinement further enhances the accuracy
of these models, with the PoinT + TempConv ap-
proach achieving the lowest mean per joint position
error. Even though the single-frame methods have the
best trade-off between accuracy and computational
requirements, it seems that in specific environments
where the highest possible accuracy is needed, it may
be more convenient to incorporate temporal informa-
tion for fine-tuning the single-frame estimations. Fur-
thermore, the paper explores spatio-temporal meth-
ods, such as sequence-to-sequence modeling using
LSTMs and end-to-end approaches like the Temporal
DGCNN. While the sequence-to-sequence LSTM re-
finement does not significantly affect MPJPE, it con-
tributes to an increase in mean average precision. The
Temporal DGCNN, despite its lower accuracy com-
pared to single-frame models, presents a satisfactory
trade-off between memory requirements and achieved
accuracy, making it a viable option in scenarios where
computational complexity is a priority or limited re-
sources are provided. Our research contributes valu-
able insights into the strengths and weaknesses of dif-
ferent methods, offering guidance for the develop-
ment of effective and reliable human pose estimation
applications. Our survey also underscores the impor-
tance of temporal information and its role in enhanc-
ing the robustness of pose prediction models. As the
field continues to evolve, addressing challenges and
leveraging opportunities in this dynamic domain re-
mains a key focus for future research.
REFERENCES
Artacho, B. and Savakis, A. (2020). Unipose: Unified hu-
man pose estimation in single images and videos. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR).
Cao, Z., Hidalgo, G., Simon, T., Wei, S., and Sheikh, Y.
(2021). Openpose: Realtime multi-person 2d pose
estimation using part affinity fields. IEEE Trans-
actions on Pattern Analysis Machine Intelligence,
43(01):172–186.
Chao, X., Ge, Z., and Leung, H. (2023). Video2mesh: 3d
Leveraging Temporal Context in Human Pose Estimation: A Survey
89

human pose and shape recovery by a temporal convo-
lutional transformer network. IET Computer Vision,
17(4):379–388.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., Uszkoreit, J., and Houlsby,
N. (2021). An image is worth 16x16 words: Trans-
formers for image recognition at scale. In Interna-
tional Conference on Learning Representations.
Einfalt, M., Ludwig, K., and Lienhart, R. (2023). Up-
lift and upsample: Efficient 3d human pose estima-
tion with uplifting transformers. In Proceedings of
the IEEE/CVF Winter Conference on Applications of
Computer Vision (WACV), pages 2903–2913.
Fang, H.-S., Xie, S., Tai, Y.-W., and Lu, C. (2017). Rmpe:
Regional multi-person pose estimation. In 2017 IEEE
International Conference on Computer Vision (ICCV),
pages 2353–2362.
Hossain, M. R. I. and Little, J. J. (2018). Exploiting tem-
poral information for 3d human pose estimation. In
Ferrari, V., Hebert, M., Sminchisescu, C., and Weiss,
Y., editors, Computer Vision – ECCV 2018, pages 69–
86, Cham. Springer International Publishing.
Joo, H., Simon, T., Li, X., Liu, H., Tan, L., Gui, L.,
Banerjee, S., Godisart, T. S., Nabbe, B., Matthews,
I., Kanade, T., Nobuhara, S., and Sheikh, Y. (2017).
Panoptic studio: A massively multiview system for so-
cial interaction capture. IEEE Transactions on Pattern
Analysis and Machine Intelligence.
Kang, Y., Liu, Y., Yao, A., Wang, S., and Wu, E. (2023). 3d
human pose lifting with grid convolution. In Proceed-
ings of the Thirty-Seventh AAAI Conference on Artifi-
cial Intelligence and Thirty-Fifth Conference on Inno-
vative Applications of Artificial Intelligence and Thir-
teenth Symposium on Educational Advances in Artifi-
cial Intelligence, AAAI’23/IAAI’23/EAAI’23. AAAI
Press.
Lea, C., Flynn, M. D., Vidal, R., Reiter, A., and Hager,
G. D. (2017). Temporal convolutional networks for
action segmentation and detection. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition (CVPR).
Li, W., Du, R., and Chen, S. (2022). Skeleton-based spatio-
temporal u-network for 3d human pose estimation in
video. Sensors, 22(7).
Li, W., Liu, H., Ding, R., Liu, M., Wang, P., and Yang,
W. (2023). Exploiting temporal contexts with strided
transformer for 3d human pose estimation. IEEE
Transactions on Multimedia, 25:1282–1293.
Liu, J., Guang, Y., and Rojas, J. (2020). Gast-net:
Graph attention spatio-temporal convolutional net-
works for 3d human pose estimation in video. CoRR,
abs/2003.14179.
Liu, Z., Lin, Y., Cao, Y., Hu, H., Wei, Y., Zhang, Z., Lin,
S., and Guo, B. (2021). Swin transformer: Hierarchi-
cal vision transformer using shifted windows. In Pro-
ceedings of the IEEE/CVF International Conference
on Computer Vision (ICCV), pages 10012–10022.
Mehta, D., Sotnychenko, O., Mueller, F., Xu, W., Elgharib,
M., Fua, P., Seidel, H.-P., Rhodin, H., Pons-Moll, G.,
and Theobalt, C. (2020). XNect: Real-time multi-
person 3D motion capture with a single RGB camera.
volume 39.
Mehta, D., Sridhar, S., Sotnychenko, O., Rhodin, H.,
Shafiei, M., Seidel, H.-P., Xu, W., Casas, D., and
Theobalt, C. (2017). Vnect: Real-time 3d human pose
estimation with a single rgb camera. volume 36.
Min, Y., Chai, X., Zhao, L., and Chen, X. (2019). Flicker-
net: Adaptive 3d gesture recognition from sparse point
clouds. In BMVC, page 105.
Min, Y., Zhang, Y., Chai, X., and Chen, X. (2020). An ef-
ficient pointlstm for point clouds based gesture recog-
nition. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR).
Nie, Q., Liu, Z., and Liu, Y. (2023). Lifting 2d human pose
to 3d with domain adapted 3d body concept. Int. J.
Comput. Vision, 131(5):1250–1268.
Pavllo, D., Feichtenhofer, C., Grangier, D., and Auli, M.
(2019). 3d human pose estimation in video with tem-
poral convolutions and semi-supervised training. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR).
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017). Pointnet:
Deep learning on point sets for 3d classification and
segmentation. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
Sun, K., Xiao, B., Liu, D., and Wang, J. (2019). Deep high-
resolution representation learning for human pose es-
timation. In Proceedings Of The IEEE Conference On
Computer Vision And Pattern Recognition (CVPR).
Tang, Z., Qiu, Z., Hao, Y., Hong, R., and Yao, T. (2023).
3d human pose estimation with spatio-temporal criss-
cross attention. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 4790–4799.
Wang, Y., Sun, Y., Liu, Z., Sarma, S. E., Bronstein, M. M.,
and Solomon, J. M. (2019). Dynamic graph cnn for
learning on point clouds. ACM Trans. Graph., 38(5).
Wu, M. and Shi, P. (2023). Human pose estimation based on
a spatial temporal graph convolutional network. Ap-
plied Sciences, 13(5).
Yang, Y., Ren, Z., Li, H., Zhou, C., Wang, X., and Hua, G.
(2021). Learning dynamics via graph neural networks
for human pose estimation and tracking. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition (CVPR), pages 8074–8084.
Zhao, Q., Zheng, C., Liu, M., Wang, P., and Chen, C.
(2023). Poseformerv2: Exploring frequency domain
for efficient and robust 3d human pose estimation. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
8877–8886.
Zheng, C., Zhu, S., Mendieta, M., Yang, T., Chen, C., and
Ding, Z. (2021). 3d human pose estimation with spa-
tial and temporal transformers. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion (ICCV), pages 11656–11665.
ˇ
Skorv
´
ankov
´
a, D. and Madaras, M. (2021). Human pose
estimation using per-point body region assignment.
COMPUTING AND INFORMATICS, 40(2):387–407.
IMPROVE 2024 - 4th International Conference on Image Processing and Vision Engineering
90
