
Semantic Segmentation of Paddy Parcels Using Deep Neural
Networks Based on DeepLabV3
Syazwani Basir
a
, Nurul Aina Abdul Aziz
b
and Nurshafiza Zanal Abiddin
c
Malaysian Space Agency (MYSA), No. 13, Jalan Tun Ismail, 50480 Kuala Lumpur, Malaysia
Keywords: DeepLabV3, Paddy, Agriculture, Food Security, ArcGIS Pro.
Abstract: Paddy parcels are frequently converted to other structures which contributes significantly to changes in paddy
cultivation areas and a decrease in rice production. Determining the current land use status for paddy parcels
annually is quite challenging; thus, the Paddy Geospatial Information System (MakGeoPadi) has been
developed to determine the precise Malaysian paddy cultivation regions in order to provide a sufficient food
supply for the entire country. Deep convolutional neural network (DCNN) algorithms such as DeepLabV3
are used in this study to accurately estimate paddy yield of 12 granaries. The objective of this study is to
enhance the DeepLabV3 paddy parcel detection model to generate data that can be relied upon for reliable
decision-making. Deep-learning applications based on the DeepLabV3 model were classified into four
classes: active paddy parcel (PA), miscellaneous paddy parcel (PP), permanent structures (SK) and permanent
crop (TK) using ResNet50 in ArcGIS Pro version 2.9. DCNN has been utilised to perform semantic
segmentation. The DCNN architecture known as DeepLabV3 is trained using the 16,000 datasets in the
experiment, with Pleiades satellite images scaled at 224 x 224-pixel sizes. Following the training phase, the
DeepLabV3 model achieved the highest successful training accuracy, scoring 91.6%.
1 INTRODUCTION
In Malaysia, paddy parcels are widely cultivated
extensively in 12 paddy granaries across the country
which are planted twice a year; however, records
indicate that Malaysia has the least total area of paddy
cultivation in Southeast Asia, with an estimate of
600,000 hectares (Firdaus et al. 2020). Due to its
inability to meet the nation’s yearly rice consumption,
Malaysia continues to import rice from Vietnam and
Thailand (Tey & Radam, 2011). Nevertheless, given
that most commodities are currently experiencing
sharp price increases, this scenario is viewed as
highly risky if the supply nation ends the transaction
or increases the price of rice. The Russia-Ukraine war
is one of the factors affecting the import sector and
resulting in low supply and high demand (Wicaksana
& Ramadhan, 2022; Jagtap et al. 2022; Lin et al.
2023).
Through the National Agro-Food Policy 2021-
2030 (DAN 2.0), there is a need to enhance the
a
https://orcid.org/0000-0002-1203-537X
b
https://orcid.org/0009-0003-0776-0045
c
https://orcid.org/0009-0005-8597-8845
resilience of the national food system, particularly in
light of the current global crisis. This will entail
optimising network performance across all domains,
including production, processing, distribution,
nutrition, and food safety.
To deal with food security issues, the Malaysian
government aims to achieve 70% self-sufficiency
(SSL) for local rice production under the 12
th
Malaysian Plan (RMK-12). To assess target
attainment, precise and up-to-date spatiotemporal
information on paddy cultivation status is required.
Therefore, the Malaysian Space Agency (MYSA)
collaborated with the Malaysian Department of
Agriculture (DOA) to develop the Paddy Geospatial
Information System (MakGeoPadi), which pinpoints
the ideal paddy planting zones in Malaysia to assist
the government in monitoring to ensure that the
country has an adequate supply of rice so that it is
always prepared to deal with shortages in the global
market or an increase in grain prices. The main role
of the MakGeoPadi system is to identify the region of
Basir, S., Aziz, N. and Abiddin, N.
Semantic Segmentation of Paddy Parcels Using Deep Neural Networks Based on DeepLabV3.
DOI: 10.5220/0012698200003696
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2024), pages 173-180
ISBN: 978-989-758-694-1; ISSN: 2184-500X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
173

12 granaries located across Malaysia. In the
meantime, land use changes often affect the actual
area of paddy production, accurate paddy
segmentation is essential. In order to fulfil the
requirements of the National Crop Cutting Survey
(CCS), an annual reporting requirement that has an
impact on the subsidies provided to the agriculture
sector. Under current practice, field observers
conduct the surveying process manually, which is an
expensive and time-consuming procedure.
Therefore, the application of remote sensing and
deep learning techniques is proposed for an
automated surveying system that classifies the paddy
fields' satellite photos semantically based on the
target class. Since we are handling high-resolution
satellite imagery with geolocation and spatial layer
with attribute table information, we decided to test the
capability of ArcGIS Pro's Deep Learning toolset.
ArcGIS Pro tools consume models built to
recognize certain characteristics in third-party deep
learning frameworks (such as TensorFlow, CNTK,
and PyTorch) and provide features or class maps.
(ESRI, 2020). This toolset contains several type of
modules including object detection, pixel
classification and image translation for raster
datasets. Pixel classification module that are already
equip in the Deep Learning library is UNET, Pyramid
Scene Parsing Network, DeeplabV3, BDCN Edge
Detector, HED Edge Detector and Change Detector.
Sharifzadeh, S., Tata, J., Sharifzadeh, H., & Tan,
B. (2020) previously use farm area segmentation in
satellite images using deeplabv3+ neural networks.
The DeepLabv3+ model is utilised for semantic
segmentation of farm pixels after categorising the
picture patches containing farm areas. To transfer the
learned characteristics for the new farm segmentation
problem, four distinct pretrained networks are used:
resnet18, resnet50, resnet101, and mobilenetv2. The
model trained with resnet50 achieved the maximum
semantic segmentation accuracy.
Therefore, this research aims to develop the
DeepLabV3 paddy rice detection model in order to
produce data suitable for reliable decision-making.
To attain higher accuracy, Deep-learning applications
based on the DeepLabV3 model were classified into
four categories: active paddy parcel (PA),
miscellaneous paddy parcel (PP), permanent
structures (SK) and permanent crop (TK). In this
study, the DeepLabV3 deep learning workflow was
completed using ArcGIS Pro and the Deep Learning
Toolbox. The images in this study were generated
from Pleiades satellite imagery in three-band RGB
colour.
2 METHODOLOGIES
2.1 Study Area
The research was carried out in IADA Barat Laut
Selangor (BLS), the largest paddy cultivation region
in Malaysia, which covers an area of 17,741 hectares
(Sistem MakGeoPadi, 2023). The rice production
from the BLS granary is expected to contribute to the
nation’s goal of self-sufficiency in terms of food
security (SSL) (Omar et al. 2019). The study region
is in the district of Kuala Selangor in the state of
Selangor and is depicted in Figure 1. This region is
noteworthy for its well-designed irrigation network,
which makes it easier to cultivate short-term crops
twice a year. Known as one of the most productive
regions in Malaysia for producing rice, this lush area
was crucial in producing an anticipated 155,631
metric tonnes of rice in 2021.
Figure 1: (a) The MakGeoPadi system map shows the
location of ten paddy granary areas in Peninsular Malaysia
and (b) the enlargement of a satellite image of the study area
in IADA Barat Laut Selangor (BLS) overlaid with irrigation
blocks.
The site's flat geography supports many agricultural
crops such as rice, oil palm, vegetables, and fruits.
(a)
(b)
GISTAM 2024 - 10th International Conference on Geographical Information Systems Theory, Applications and Management
174

The ditches, rice field boundary, and roads that divide
the fields which are often small clearly show their
boundaries. Since most of the year is cloudy and
rainy, there are two planting seasons: Main Season
(August through February) and Off Season (March
through July). As a result, the soil moisture content is
rather high. The irrigation system that contributes to
the varied conditions of the paddy lot planting stages
is one of the study area's unique features. Since there
are currently four irrigation phases, all planting stages
mainly ploughing, irrigating, planting, and harvesting
can be monitored simultaneously on the day that the
picture satellite is acquired.
In the last few years, there has been an annual
decline in the number of active paddy parcels in this
area of 200 hectares due to fast land use changes in
recent years (Malaysian Department of Agriculture,
2022). This condition necessitates effective
monitoring action to determine the present status of
the specific lot each season.
2.2 Preparation of Dataset
2.2.1 Satellite Image Processing
The following four key paddy-planting activities are
included in the multi-temporal Pleiades satellite
images that were obtained: cultivated paddy lands,
which contain dwellings, roads, and other land
usages; and uncultivated paddy regions. The High-
Resolution Imager (HiRI) on board the Pléiades
constellation delivers very-high optical resolution
(0.5 m resolution) with a swath of 20 km (Airbus,
2011). To improve colour presentation and contrast,
digital enhancement procedures were applied to the
satellite imagery in three-band RGB colour of
compressed unsigned 8-bit dataset with tiff format.
Image enhancement or the practice of modifying
digital images is the next compulsory step so that they
are more suited for computer vision procedure. The
adjustment of brightness, sharpen, and haze reduction
must be performed to enhance the actual feature.
Since the study area has its administrative boundaries,
the subsets of the enhanced image were then created
in order to remove areas that weren’t granary from the
scene.
2.2.2 Ground Truth Preparation
The authorised body in land surveying, the
Department of Survey and Mapping Malaysia
(JUPEM), provided the lots for the National Digital
Cadastral Database (NDCDB). Four (4) classes were
manually created out of these lots: by superimposing
the multi-temporal Pleiades satellite images over the
cadastral lot, the following paddy parcels can be
identified: active paddy parcel (PA) (ploughing,
irrigating, planting, and harvesting), miscellaneous
paddy parcel (PP), permanent structures (SK) and
permanent crop (TK). To generate ground truth
samples for deep learning training, the segmentation
data was generated in a standard shapefile GIS
format. As the authorized department, the IADA
Barat Laut Selangor conducted an on-site verification
process to confirm the accuracy of the segmentation.
The Pleiades image and the ground truth are seen in
Figure 2.
Figure 2: Images of paddy parcels samples: (a) satellite image
and (b) their ground truth labels. PA: active parcel, SK:
building label; PP: vegetable and TK: oil palm.
2.2.3 Extraction of Training Datasets
Before a deep learning model can detect
characteristics and classify the pixel, it must be
trained to recognise those items. It is our
responsibility to gather and supply input data and
training samples, after which you must train the
model to identify those characteristics or objects.
(b)
(a)
PA
SK
PP
TK
PA
SK
PP
TK
Semantic Segmentation of Paddy Parcels Using Deep Neural Networks Based on DeepLabV3
175

(ESRI,2020). The items in an image can be
interactively identified and labelled, and the training
data can be exported as the image chips, labels, and
statistics needed to train a model. The Export
Training Data for Deep Learning geo-processing tool
can be used to create the training data required for the
subsequent step if you already have labelled vector or
raster data.
A ground truth polygon shapefile and an unsigned
8 bit RGB TIF satellite picture were used to create the
training dataset. This combination enabled the
construction of the dataset. Four distinct class labels
were applied to the segmented polygon: PA, PP, SK
and TK, and the images were split into pairs of tiles
that matched the same geographic area. Each tile
represented the RGB values of the input features. A
total of sixteen thousand samples with 224 x 224 pixel
images from ground reality were utilized in the
sample.
2.2.4 DeepLabV3 Module Training
For semantic segmentation, fully convolutional
neural networks (FCNs) are frequently employed.
Using FCNs on images for segmentation tasks is
problematic since the input feature maps get smaller
as they pass through the network's pooling and
convolutional layers. As a result, information is lost
and output with fuzzy object borders and low
resolution predictions is produced. DeepLab uses a
technique called multiple pooling layers, or spatial
pyramid pooling (SPP), to handle multi-scale
pictures. With a fixed integer representing the input
image size, it partitions the feature maps produced
from the convolutional into spatial bins. DeepLabV3
employs atrous convolution with SPP to extend the
field of view of filters, which aids in integrating larger
contexts without adding more parameter (Ahmat
Imran et al. 2020).
The DeepLab model addresses this challenge by
using Atrous convolutions and Atrous Spatial
Pyramid Pooling (ASPP) modules, as shown in
Figure 3. This architecture has evolved over several
generations. Atrous Convolution is introduced in
DeepLab as a tool to adjust or control the effective
field-of-view of the convolution. It modifies field-of-
view using a parameter called ‘atrous or dilation rate’.
It is a simple yet powerful technique to make the field
of view of filters larger without impacting
computation or the number of parameters. Atrous
convolution is similar to traditional convolution
except the filter is up sampled by inserting zeros
between two successive filter values along each
spatial dimension. r - 1 zeros are inserted where r is
atrous/dilation rate. This is equivalent to creating r −
1 holes between two consecutive filter values in each
spatial dimension. In the diagram below, a filter of
size 3 with a dilation rate of 2 is applied to calculate
the output. We can visualize filter values separated by
one hole since the dilation rate is 2. If the dilation rate
r is 1, it will be standard convolution (Chen et al.
2016).
Figure 3: Atrous Spatial Pyramid Pooling in DeepLabV3
Model Architecture (ESRI, 2020).
Using the ArcGIS Pro Train Deep Learning
Model the model parameter which is DeepLabV3, the
maximum epoch, the batch size, model argument and
backbone model variable need to be determined.
In principal, the increasing of the batch size can
improve tool performance; however, as the batch size
increases, more memory is used. In this study, the
batch size used is 8. The batch size is a hyper
parameter of gradient descent that controls the
number of training samples to work through before
the model’s internal parameters are updated while
number of epochs is a hyper-parameter of gradient
descent that controls the number of complete passes
through the training dataset. (Brownlee, J., 2022)
Three type of backbone model was tested which
is Resnet34, Resnet50, and Resnet101 to test the best
model fit the study.
This backbone selection enhances
the model's efficacy and efficiency, especially with
regard to the use of computational resources and
precision in capturing complex information. The chip
size is 224 which is suite for 0.5-meter sample image
resolution.
2.2.5 Validation of DeepLabV3 Model
The trained model is validated to assess its
performance and ensure that it can effectively
generalise to a new or previously unexplored dataset.
The study uses a training dataset with 10% validation.
Test accuracy indicates that the trained model
recognises independent images that were not used in
training, whereas training accuracy indicates that the
same images are used for both testing and training.
When training a deep learning model for imagery, the
output from the Train Deep Learning Model tool
includes a file named model_metric.html. This file
contains information on your trained model, such as
GISTAM 2024 - 10th International Conference on Geographical Information Systems Theory, Applications and Management
176
the learning rate, training and validation loss, and the
average precision score (ESRI, 2020).
3 RESULT AND DISCUSSION
3.1 DeepLabV3 Training Accuracy
Several metrics are available when using Deep
Learning to help us determine how effectively our
model is performing. These features include the
smoothness of the curve, its convergence, and how
generalizable the learning rate is. (Ibrahim, M.,
2023). With this knowledge, we might deduce more
details about our models. In this study, we will be
concentrating on accuracy and loss. They are both
crucial values to consider while we are training our
models. Loss is a value that represents the sum of all
errors in our model. It gauges how well our model is
performing.
A model that has a low accuracy but a high loss
would indicate that it makes significant mistakes in
the majority of the data. However, low accuracy and
loss indicate that the model produces modest errors in
the majority of the data. The best scenario would be
for the model to make tiny errors on a small portion
of the data if the accuracy is high and the loss is low.
Riva, W. (2023).
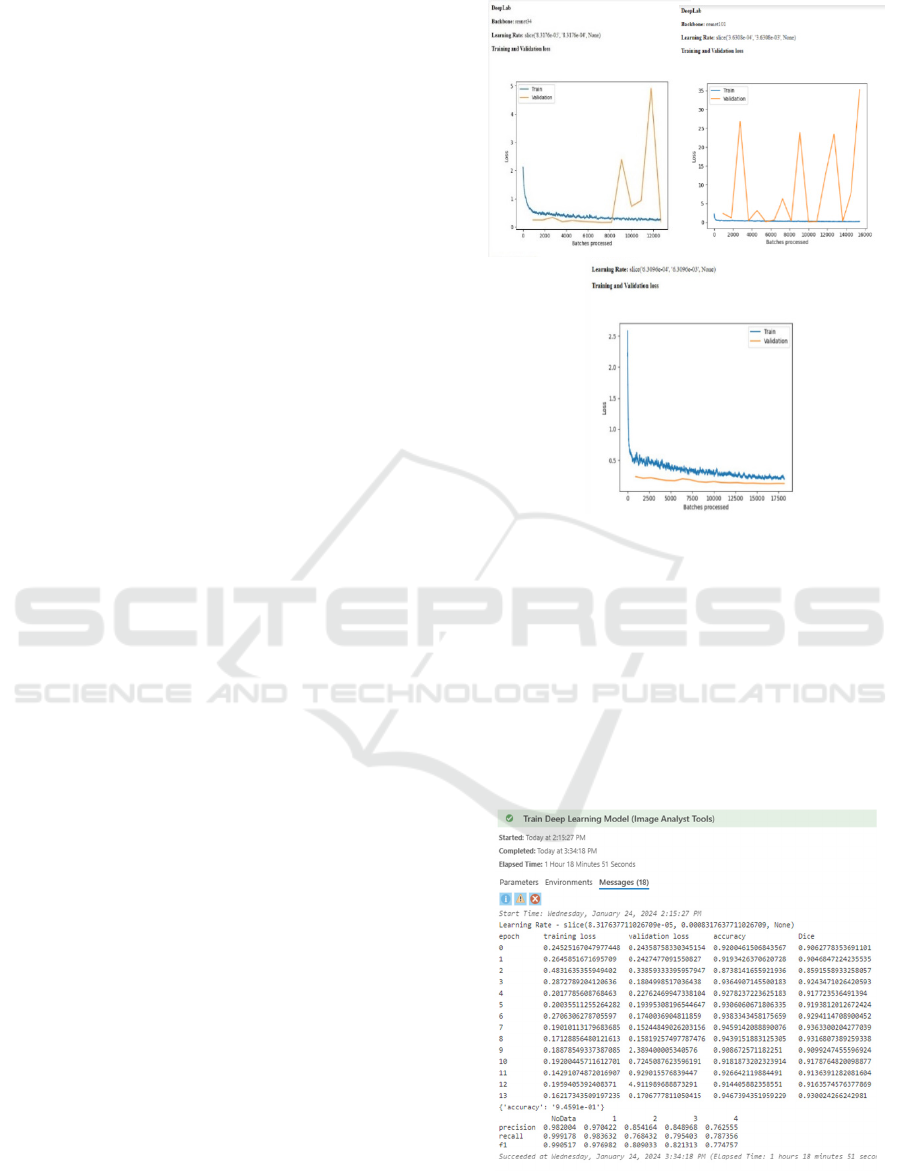
The result of training accuracy from three
different backbone model are depicted in Figure 4.
Based on the graph 4(a) and 4(b), the high variance of
the model performance is an indicator of an
overfitting problem. The training time of the model or
its architectural complexity may cause the model to
overfit. If the model trains for too long on the training
data or is too complex, it learns the noise or irrelevant
information within the dataset. At 8000 batches
processed in epoch 10, the model has to be stopped.
Figure 4(c) depicts the optimal Restnet-50
backbone since the learning curve converges to a
point where additional training does not yield
significant improvements. This indicates that the
model has maximised its learning from the training
set and is operating at peak efficiency. Naturally,
there may be little ups and downs along the route, but
sharp, abrupt jumps in the curve may indicate that
something is off. A smooth learning curve indicates a
steady and reliable learning process for the model.
In term of accuracy, it compares the model's
predictions with the actual values in terms of
percentage, it evaluates how well our model predicts
.
Figure 4: Learning curve (a) RestNet-34 (b) RestNet-101 (c)
RestNet-50, respectively.
Figure 5 shows the training accuracy of RestNet-
50 module backbone. As the epoch increased, the
model correctly predicts the outcome of the next step
does the accuracy increased. Understanding these
dynamics allows us to see how, as the model
progressively gets better and makes more accurate
predictions, the accuracy curve displays discrete
jumps rather than a smooth trend. Final training
accuracy is 94.5%.
Figure 5: Accuracy of trained Module.
(a)
(c)
(b)
Semantic Segmentation of Paddy Parcels Using Deep Neural Networks Based on DeepLabV3
177
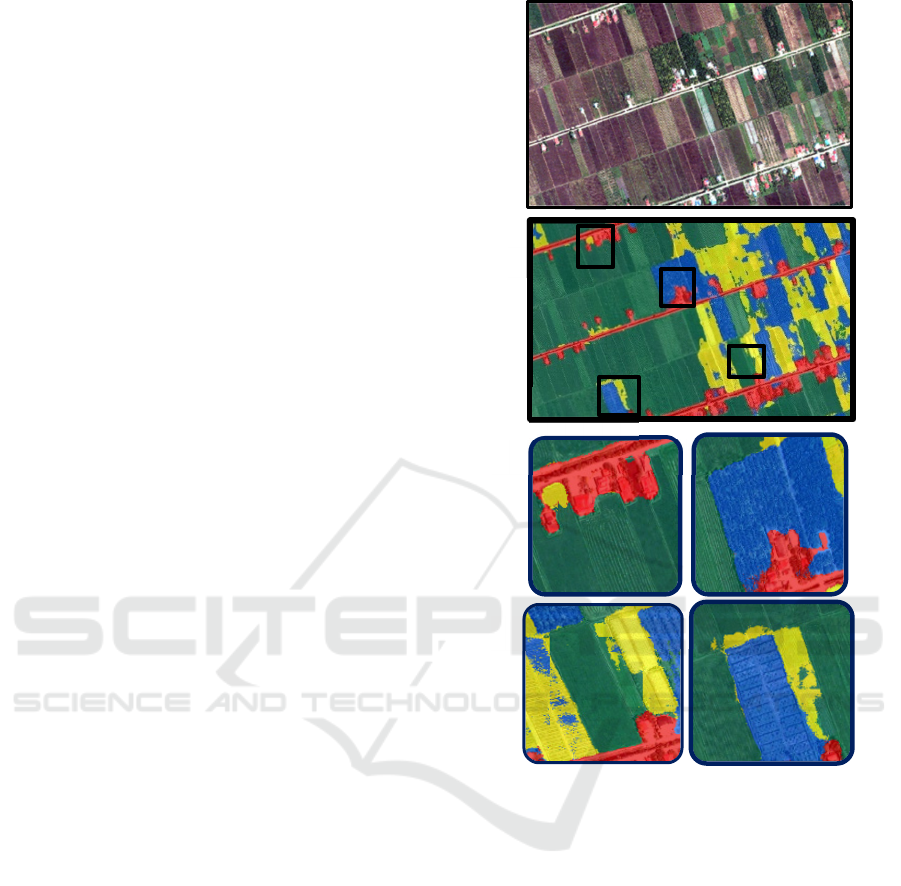
3.2 DeepLabV3 Segmentation Output
From the tested dataset, a total area of segmented
images (17,000 hectares) was successfully generated.
About 30 minutes were needed for the pixel
classification procedure, a far shorter time than the
hour needed for training. As shown in Figure 6, the
class of miscellaneous crop like vegetable, corn, and
banana tree tends to be incorrectly assigned as an
active parcel like segmentation output in (a) and (b).
This situation only happened during harvesting
season of those short-term crop which is bare land
that or the features of line from paddy straw which is
similar with vegetable ridges. The quality of the
image and the status of paddy planting during image
acquisition always become the main factors in a good
result. Half of the area in this image was captured
during the land preparation phase, when the features
were identical for the PP harvesting phase.
Otherwise, most classifications for active parcel
(PA) and permanent structure (SK) are very well
segmented based on the observations in (c) and (d).
Only certain permanent structure like house in a
smaller size will be generalized as (PA). Inaccurate
annotations, or "label noise," have a substantial
impact on performance and can occur throughout
labelling process. The model is unable to learn the
characteristics of exact object borders and, to some
extent, narrowly formed small objects due to relative
shift and segment error. ( Maiti, A et al. 2022).
3.3 Accuracy Assessment
To enhance the accuracy of the segmentation map,
ground-checking activities were carried out with the
agriculture agency. A total of 120 randomly selected
points roughly 30 points per class were used for the
accuracy assessment by using the ArcGIS Pro
compute confusion matrix tool. To store the class that
results from the classification and the matching
ground truth class for each point, respectively, the
tool accepts shape files with two fields designated
classified and ground truth (Jensen, 2016). The
confusion matrix produced by the accuracy
assessment tool is shown in Figure 7. The number of
points from each ground truth class that were found
on the classification output classes (columns) and the
number of points from each classification output class
that are part of the ground truth classes (rows) are
cross-referenced in the matrix. The major diagonal of
the matrix lists the number of correctly identified
points and the total number of correctly classified
points.
Figure 6: Enlargement of segmentation output.
User accuracy refers to how real the classified
map is on the ground. Thus, in this study, 91.6% of
the mapped area has the same features as the ground,
with a Kappa of 0.88. Producer accuracy refers to the
classification scheme. According to the findings, the
miscellaneous paddy parcel (C2) category and
permanent crop (C4), which are minority classes in
the area can be damaging to the learning process
because the number of samples is a bit lower than C1
and C3. Furthermore, there should be a significant
and uniform distribution of training samples with the
anticipated segmentation labels for every label. The
existence of various classes in one plot will increase
the complexity of pixel classification in the area.
b
a
d
c
d
b
a
c
GISTAM 2024 - 10th International Conference on Geographical Information Systems Theory, Applications and Management
178

Figure 7: DeepLabV3 user and producer accuracy.
3.4 Segmentation Post-Processing
Several post-processing procedures must be
completed on the DeepLabV3's raw classification
output, particularly when it comes to paddy
cultivation activities that are governed by individual
lot borders. For raster-to-vector conversion, the
ArcGIS Pro spatial analyzer tool is therefore
essential. To meet the requirements of the
MakGeoPadi database design, several post-
processing steps are compulsory to apply. After the
raster layer is converted to a polygon, the first step is
to smooth the polygon with Bezier curves, which will
be fitted between vertices using Bezier interpolation.
The vertices of the input polygons are then traversed
by the resultant polygons. There is no tolerance needed
for this algorithm. The result will approximate Bezier
curves. Second, to match the segmentation result into
their lot boundary, the polygon needs to be merged
with the cadastral lot. The merge tool combines the
data from numerous sources and adds it to a new data
set. It combines attributes with the ability to match
fields from input datasets, so it's not only geometry.
As long as the layers have the same feature type, the
merge geoprocessing tool can combine two or more
of them. The type and arrangement of fields in
attribute tables must be checked especially the
duplicate fields. The area information of each
polygon needs to be calculated again in hectares’ unit.
The attribute table shows details about a chosen
layer's features. A feature (with or without geometry)
is represented by each row in the table with a new
unique code lot that represents each polygon.
Third, the minimum mapping unit was set to 0.01
hectare by using elimination tools. This tool is used to
remove a polygon by combining it with the polygon
that has the longest border with the surrounding
features. The tool is used in situations where topology
exists between feature classes.
3.5 Integration with MakGeoPadi System
The new segmented paddy lot area is ready to be
updated in the database. Following that, a map of the
paddy status activities was added to the MakGeo-Padi
database together with other auxiliary data including
the owner's profile, the farmer's revenue, and yield
details. An entity relationship diagram is created
using the information gathered to explain the general
link between tables and spatial data. Furthermore, the
logical structure is designed to guarantee that data is
kept in an orderly fashion (Siti Masayu Yahaya et.al.,
2015)
The segmented area also becomes the base data
for further analysis including analyzing planting
activities using SAR satellite. The latest information
on the status of paddy planting activities is crucial to
identify paddy parcels that are unable to comply with
the planting schedule in each season to enable
appropriate action by the agricultural agency,
including providing assistance and advisory services
to the farmers involved. Through MakGeoPadi the
actual cultivated area is determined thus the amount
of sustainable production can guarantee sufficient
national food supply in preparation for the increase in
the number of the country's population according to
the Malaysia National Transformation 2050 (TN50).
4 CONCLUSIONS
DeepLabV3 segmentation with backbone Resnet-50
was found to be able to semantically classify the
paddy cultivation area into active paddy parcel (PA),
miscellaneous paddy parcel (PP), permanent
strictures (SK) and permanent crop (TK) with training
accuracy of 91.6%. Future improvements to the
training data can be made to improve deep learning’s
semantic segmentation results mainly in providing
balanced training sample. The condition of the activities
and the precise and timely statistics of the paddy
planting area are necessary of managing agriculture and
formulating policies. This produces crucial data for
machinery. According to the DOA's efficacy research,
monitoring by satellite pictures monitors 100% of the
entire granary while saving 50% of the time required for
field surveys.
ACKNOWLEDGMENTS
We thank DOA and IADA Barat Laut Selangor for
their cooperation in providing the data. MYSA makes
this information available to authorized users for
operationalization reasons at http://makgeopadi.
mysa.gov.my/.
Semantic Segmentation of Paddy Parcels Using Deep Neural Networks Based on DeepLabV3
179

REFERENCES
Ahmed, I., Ahmad, M., Khan, F.A., Asif, M. (2020).
Comparison of deep-learning-based segmentation
models: Using top view person images. IEEE Access,
8, 136361-136373.
Akhmalluddin et al. (2023). U-NET Semantic
Segmentation of High-Resolution Imagery Using
ArcgGIS Pro Deep Learning Analyst. presented at the
Asian Conference on Remote Sensing (ACRS),
Nangang, Taiwan. 2023.
Brownlee, J. (2022) Difference between a batch and an
epoch in a neural network, Machine
LearningMastery.com. Available at: https://machine
learningmastery.com/difference-between-a-batch-and-
an-epoch/ (Accessed: 13 March 2024).
Chen, L., Papandreou, G., Kokkinos, I., Murphy, M.
(2016). A Yuille Semantic Image Segmentation with
Deep Convolutional Nets and Fully Connected CRFs,
arXiv:1412.7062 2016.
Elharrouss, O., Akbari, Y., Almaadeed, N., & Al-Maadeed,
S. (2022). Backbones-review: Feature extraction
networks for deep learning and deep reinforcement
learning approaches. arXiv preprint arXiv:2206.08016.
ESRI (2020). How DeepLabV3 Work. Access at
https://developers.arcgis.com/python/guide/how-deep
labv3-works/
Firdaus, R.R., Leong Tan, M., Rahmat, S.R., Senevi
Gunaratne, M. (2020). Paddy, rice and food security in
Malaysia: A review of climate change impacts. Cogent
Social Sciences, Vol. 6(1), pp. 1818373
Ibrahim, M. (2023) A deep dive into learning curves in
machine learning, W&B. Available at:
https://wandb.ai/mostafaibrahim17/ml-articles/reports/
A-Deep-Dive-Into-Learning-Curves-in-Machine-Lear
ning--Vmlldzo0NjA1ODY0
Jagtap, S., Trollman, H., Trollman, F., Garcia-Garcia, G.,
Parra-López, C., Duong, L., Martindale, W., Munekata,
P.E., Lorenzo, J.M., Hdaifeh, A., Hassoun, A. (2022).
The Russia-Ukraine conflict: Its implications for the
global food supply chains. Foods, 11(14), p.2098.
Jensen, John R. (2016). Introductory Digital Image
Processing: A Remote Sensing Perspective. 4th ed.
Pearson.
Lin, F., Li, X., Jia, N., Feng, F., Huang, H., Huang, J., Fan,
S., Ciais, P., Song, X.P. (2023). The impact of Russia-
Ukraine conflict on global food security. Global Food
Security, 36, p.100661.
Maiti, A., Oude Elberink, S. J., & Vosselman, G. (2022).
Effect of label noise in semantic segmentation of high
resolution aerial images and height data. ISPRS Annals
of the Photogrammetry, Remote Sensing and Spatial
Information Sciences, 2, 275-282.
Omar, S.C., Shaharudin, A., Tumin, S.A. (2019). The status
of the paddy and rice industry in Malaysia. Khazanah
Research Institute. Kuala Lumpur. Malaysia.
Production, and Yield. Retrieved From http://www.
fao.org/3/ca6408en/ca6408en.pdf
Quan, B., Liu, B., Fu, D., Chen, H., & Liu, X. (202).
Improved deeplabv3 for better road segmentation in
remote sensing images. In 2021 International
Conference on Computer Engineering and Artificial
Intelligence (ICCEAI) (pp. 331-334). IEEE.
Riva, W. (2023) Interpretation of loss and accuracy for a
machine learning model, Baeldung on Computer
Science. Available at: https://www.baeldung.com/
cs/ml-loss-accuracy (Accessed: 10 March 2024).
Sharifzadeh, S., Tata, J., Sharifzadeh, H., & Tan, B. (2020).
Farm area segmentation in satellite images using
deeplabv3+ neural networks. In Data Management
Technologies and Applications: 8th International
Conference, DATA 2019, Prague, Czech Republic.
Sistem Maklumat Geospatial Tanaman Padi,Retrieved
August 18 2023. http://makgeopadi.mysa.gov.my/jelap
ang/_main
Siti Masayu Yahaya et.al (2015) "Remote Sensing and GIS
Web- Based System for Paddy Cultivation
Management in Malaysia," presented at the Asian
Conference on Remote Sensing (ACRS), Manila,
Philippines, 2015.
Tey, J.Y.S., Radam, A. (2011). Demand patterns of rice
imports in Malaysia: Implications for food security.
Food Security, 3, 253-261.
Wicaksana, K.S., Ramadhan, R.F. (2022). The Effect of the
Russia-Ukraine Crisis on Price Fluctuations and Trade
in Energy Sector in Indonesia. Jurnal Nasional
Pengelolaan Energi MigasZoom, 4(1), 6-18.
GISTAM 2024 - 10th International Conference on Geographical Information Systems Theory, Applications and Management
180
