
The Power of Gyroscope Data: Advancing Human Movement Analysis
for Walking and Running Activities
Patrick B. N. Alvim
1 a
, Jonathan C. F. da Silva
1 b
, Vicente J. P. Amorim
1 c
,
Pedro S. O. Lazaroni
2 d
, Mateus Coelho Silva
1 e
and Ricardo A. R. Oliveira
1 f
1
Departamento de Computac¸
˜
ao - DECOM, Universidade Federal de Ouro Preto - UFOP, Ouro Preto, Brazil
2
N
´
ucleo de Ortopedia e Traumatologia(NOT), Belo Horizonte, Brazil
Keywords:
Sensors, Wearable, App, Mobile, AI.
Abstract:
The ability to faithfully reproduce the real world in the virtual environment is crucial to provide immersive and
accurate experiences, opening doors to significant innovations in areas such as simulations, training, and data
analysis. In such a way that actions in the virtual environment can be applied, which would be challenging in
the real world due to issues of danger, complexity, or feasibility, enabling the study of these actions without
compromising these principles. Additionally, it is possible to capture real-world data and analyze it in the vir-
tual environment, faithfully reproducing real actions in the virtual realm to study their implications. However,
the volatility of real-world data and the accurate capture and interpretation of such data pose significant chal-
lenges in this field. Thus, we present a system for real data capture aiming to virtually reproduce and classify
walking and running activities. By using gyroscope data to capture the rotation of axes in the lower human
limbs movement, it becomes possible to precisely replicate the motion of these body parts in the virtual envi-
ronment, enabling detailed analyses of the biomechanics of such activities. In our observations, in contrast to
quaternion data that may have different scales and applications depending on the technology used to create the
virtual environment, gyroscope data has universal values that can be employed in various contexts. Our results
demonstrate that, by using specific devices such as sensors instead of generic devices like smartwatches, we
can capture more accurate and localized data. This allows for a granular and precise analysis of movement
in each limb, in addition to its reproduction. This system can serve as a starting point for the development of
more precise and optimized devices for different types of human data capture and analysis. Furthermore, it
proposes creating a communication interface between the real and virtual worlds, aiming to accurately repro-
duce an environment in the other. This facilitates data for in-depth studies on the biomechanics of movement
in areas such as sports and orthopedics.
1 INTRODUCTION
When we observe the scenario of the orthopedic area,
we realize that the study of human body movement
is a topic of great importance. Understanding the
anatomical factors behind the mechanics of move-
ment through its actors, such as muscles, bones, and
joints (Lee et al.(2019)) is of great importance and use
in the medical and sports field. With the knowledge
a
https://orcid.org/0000-0001-8509-7398
b
https://orcid.org/0000-0003-2214-397X
c
https://orcid.org/0000-0003-3795-9218
d
https://orcid.org/0000-0002-2058-6163
e
https://orcid.org/0000-0003-3717-1906
f
https://orcid.org/0000-0001-5167-1523
of these actors, it is possible to understand how move-
ment is affected by several factors, including the inter-
action between ligaments, joints, and bones, muscle
behavior, and fatigue.
In addition to analyzing any injury generated by
these components and how they affect movement, it
is also possible to act preventive against such injuries
and corrective help in healing and rehabilitation (Lu
and Chang(2012)). Deepening knowledge of the hu-
man body movement is also of great importance for
sports and physical education. Such applied studies
can be used to optimize and improve the training of
athletes seeking better technique and movement effi-
ciency.
The gyroscope data captured by sensors can be
a significant source of information not only for the
510
Alvim, P., F. da Silva, J., Amorim, V., Lazaroni, P., Silva, M. and Oliveira, R.
The Power of Gyroscope Data: Advancing Human Movement Analysis for Walking and Running Activities.
DOI: 10.5220/0012702600003690
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 26th International Conference on Enterprise Information Systems (ICEIS 2024) - Volume 1, pages 510-519
ISBN: 978-989-758-692-7; ISSN: 2184-4992
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

precise reproduction of movement in the digital twin
but also for detecting anomalies related to gait as-
sessment. Such evaluations are primarily carried out
through visual observation by a medical professional,
which can be imprecise and involve highly subjec-
tive rating scales, underscoring the importance of dig-
ital technologies as valuable tools for capturing objec-
tive data and information for accurate diagnosis (Ce-
lik et al.(2021)).
Using SPUs directly connected to the mobile de-
vice (smartphone) instead of consolidating the data
in a WPU, as proposed in (Alvim et al.(2023)), can
help improve the speed at which information reaches
the device for representation in the virtual twin. Em-
ploying a device like WPU to mediate communication
may increase the delay of information, besides being
another critical element of the system, susceptible to
errors and communication issues.
This paper presents a mobile application to cap-
ture and recognize activities in human movement.
Data is collected by a wearable device composed of
sensors and transmitted to the application, where an
AI interprets and classifies them into a type of move-
ment. At the same time, the data is also reproduced
interactively in a virtual twin that replicates the user’s
activity.
Figure 1: Application usage representation.
The main contribution of this work is:
• A proposal for a mobile platform composed of
an integrated hardware and software solution for
reproducing real movements by data sent from a
new wearable device using AI for human walking
and running activities.
1.1 Why not Smartwatches?
Smartwatches are smart devices commonly used in
healthcare and sports activities (Borowski-Beszta and
Polasik(2020)). These devices can provide informa-
tion about a person’s physical condition and perfor-
mance in a sports activity (Zhuang and Xue(2019)).
In this context, smartwatches use the sensors present
in their physical structure to predict this information
(Schiewe et al.(2020); Taghavi et al.(2019)). How-
ever, although these devices present interesting infor-
mation to the user when carrying out a particular ac-
tivity, there is an inevitable imprecision in this infor-
mation because they use unique sensors.
The unique sensors located at a specific location
of the user in the device, such as a gyroscope and
accelerometer, use the movement pattern of one of
the user’s arms to identify an activity, for example,
swimming (Cosoli et al.(2022)). In this literature, the
authors used two smartwatches to identify swimming
activity and minimize the inaccuracy of information
in data classification. This point shows the disadvan-
tage of the smartwatch: to increase accuracy, it needs
more than one device.
Differently, our work seeks to identify walking
and running activity by integrating four sensors on the
user’s leg together with a mobile application. In this
form, the application presents real information about
the activity. Therefore, we can identify more accu-
rately than a single smartwatch.
1.2 Paper Organization
This work is organized as follows: Section 2 presents
a theoretical review of related works found recently in
the literature on AI and mobile applications centered
on recognizing human activities. Section 3 presents
the requirements used to create the application and
information on how data is collected from the system.
In Section 4, we have the analysis of the App devel-
oped. Finally, in Section 5, we present conclusions
and future work.
2 THEORETICAL REFERENCES
AND RELATED WORK
In this section, we present the results of some liter-
ature reviews with an overview of human walking,
tools and mobile apps in activity recognition with in-
telligent devices.
2.1 Human Gait
The ability to walk is crucial for human life, repre-
senting one of the primary means of moving from
one place to another in the environment. This move-
ment is meticulously coordinated among the different
segments of the body, involving a complex interac-
tion between internal and external factors. Controlled
by the neuromuscular and skeletal system, walking is
The Power of Gyroscope Data: Advancing Human Movement Analysis for Walking and Running Activities
511
traditionally defined based on patterns of foot con-
tact with the ground and biomechanical properties
(Mirelman et al.(2018)).
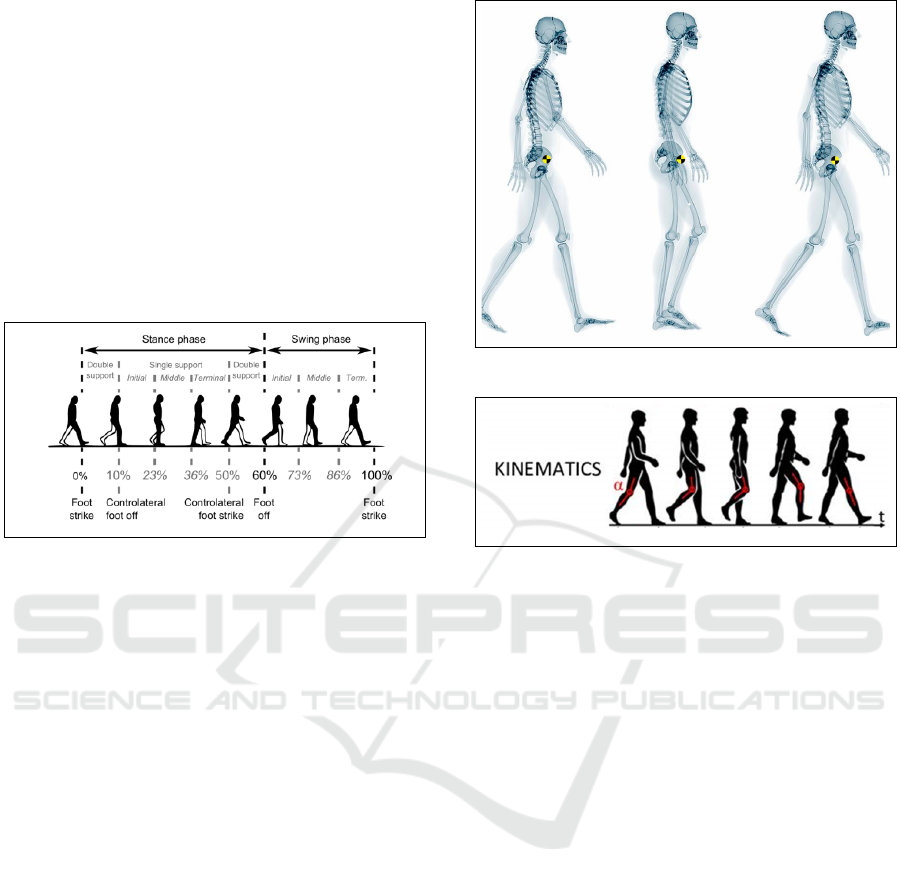
The gait cycle comprises two events, from the mo-
ment one foot makes contact with the ground until
that same foot touches the ground again. The limbs
undergo a support phase where the foot is in contact
with the ground, and a swing phase when the foot is
not in contact with the ground. The support phase,
representing 60% of the movement, can be subdi-
vided into five subphases, and the swing phase, rep-
resenting 40% of the movement, into three subphases
(Bonnefoy-Mazure and Armand(2015)).
Figure 2: Gait cycle phases and subdivisions (Bonnefoy-
Mazure and Armand(2015)).
The center of gravity of the human body is the
point where all the body’s mass is considered to
be concentrated. It is a simplified representation of
the midpoint concerning the total body weight (Yiou
et al.(2017)). During gait, it is crucial to maintain the
center of gravity (CG) of the body within the base
of support to ensure stability and balance. When the
CG moves outside of this base, imbalance occurs, in-
creasing the risk of falls. Therefore, controlling and
maintaining the stability of the CG are essential as-
pects for safe and efficient gait. This involves the co-
ordinated movement of body segments to minimize
any displacement of the CG that may occur during
walking (Moon et al.(2022)). Reducing the energy
cost of walking and maintaining movement stability
are related to the kinematics of the CG. Individuals
are constrained to specific movements during walk-
ing; conversely, decreased dynamic stability in the
CG directly impacts energy expenditure and may ren-
der movement less stable (Tucker et al.(1998)).
The examination of kinematics delineates the
movements of body segments. Given the relative
complexity of the human body and its motions, mod-
eling is essential for simplifying these mechanisms.
Quantifying joint kinematics in three dimensions is
paramount for comprehending and characterizing hu-
man body movements (Pacher et al.(2020)).
Figure 3: Representation of human body center of gravity.
Figure 4: Representation of knee kinematics in the gait cy-
cle.
2.2 AI Tools Applications in Human
Recognition
Advances in gait analysis with machine learning are
changing how we understand biomechanical systems.
After picking the best technique, the model is trained
and checked using the training set to see how well it
works. Then, its performance is tested with the test
set. If it’s accurate enough, we’re done; otherwise,
we adjust the model and keep training until we reach
the desired accuracy. Focusing on making the system
less complex, careful feature selection is key (Khera
and Kumar(2020)).
Artificial intelligence (AI) algorithms are funda-
mental for constructing new tools for recognizing hu-
man activities, such as human movement recognition
based on deep learning (Wang et al.(2018)). Together
with information received by other devices and the
usage of friendly visual interfaces, they form promis-
ing solutions for constructing a new system (Demrozi
et al.(2020); Ann and Theng(2014)).
Authors use embedded devices with convolutional
neural networks (Xu and Qiu(2021)). However, ap-
plying these techniques can demand a lot of the de-
vice’s computational power, which causes a restric-
tion for some devices. Thus, the proposed app in-
telligently presents the information sent by wearable
sensors to an android device, decentralizing tasks to
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
512
optimize the resources used throughout the system.
2.3 Mobile Applications and Wearables
Wearable technology, utilizing accelerometers, gyro-
scopes, and magnetometers, provides a means to mea-
sure a combination of gait variables. These devices
have gained popularity due to their ease of use and af-
fordability. Wearable devices offer the ability to mea-
sure various aspects of gait during running in differ-
ent environments, which can contribute to our under-
standing of running performance, fatigue, and injury
mechanismsd (Mason et al.(2023)).
Most studies involving sensor usage utilize mod-
els called inertial measurement units (IMU). These
units are generally equipped with accelerometers and
gyroscopes, and some models also include magne-
tometers. By using gyroscope data, it is possible to
achieve easier reproduction due to the lack of trans-
lation requirement, as the angular velocity at any po-
sition of the body remains the same. They also suf-
fer from less noise unlike accelerometers (Prasanth
et al.(2021)).
In the literature, we find examples of mobile ap-
plications that perform similar tasks. For instance,
applications that perform this recognition in real-time
(Lara and Labrador(2012)). These applications are
commonly used in healthcare (Zaki et al.(2020a)).
Apps developed in this context are also frequently
used on smartphones, using the device’s sensors, such
as a gyroscope and accelerometer (Zaki et al.(2020b))
(Gy
˝
orb
´
ır
´
o et al.(2009)). This perspective can present
an imprint on the recognition of the activity. Thus,
this work proposes applying AI classification in a
mobile device with data collected by externally dis-
tributed sensors, which have greater precision than
single sensors such as smartphones.
3 PROPOSED SYSTEM
In this section, we present the development of the pro-
posed work. We discuss the requirements for the con-
struction of the mobile application. Also, we present
the interface design and the AI module.
3.1 System Requirements
Before proposing the application, we must recognize
the requirements for this functioning. We performed
this evaluation by inspecting the necessary system
features to perform all the proposed tasks. The spe-
cific requirements to develop the proposed application
are:
• User-friendly computer interface design.
• Definition of minimum hardware requirements for
the application to work.
• Construction of the virtual twin replicating the
user’s movements and interface representing the
type of movement.
• Development of the history functionality, where
the path traveled on the map and the replication of
the movement will be presented.
• Statistics presentation screen, containing quanti-
tative data on each activity performed.
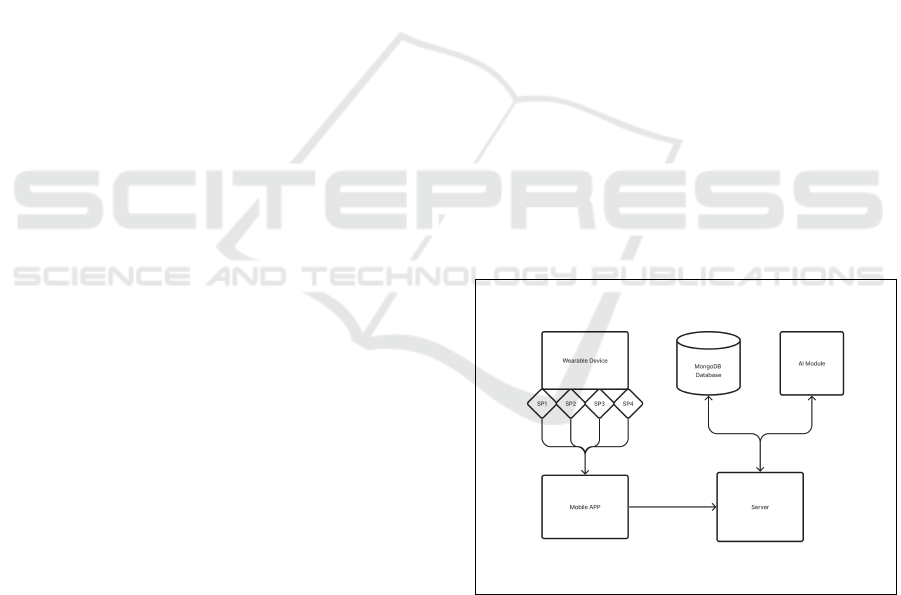
3.2 Overview of the Proposed System
The proposed system consists of three modules: the
wearable device containing sensors, the mobile appli-
cation, and the application server. The wearable de-
vice comprises four sensors positioned on the user’s
legs which are responsible for data collection from
user actions, this data works as the baseline for the
prediction algorithm. The collected data is subse-
quently sent to the mobile application, which for-
wards the data to the application server and repli-
cates the movements in the digital twin. The server
is responsible for storing the data in the database and
classifying the movement using artificial intelligence.
Figure 5 displays the dataflow diagram for the pro-
posed system.
Figure 5: System diagram.
3.2.1 Wearable Device and Sensors
Figure 6 represents the sensors (SPUs) used to cap-
ture the user action data. The SPUs have a set of
state-of-the-art IMUs (Inertial Measurement Units) to
collect the physical movement of the user’s leg. Fig-
ure 7 shows the position locally in the human body to
collect data.
The Power of Gyroscope Data: Advancing Human Movement Analysis for Walking and Running Activities
513
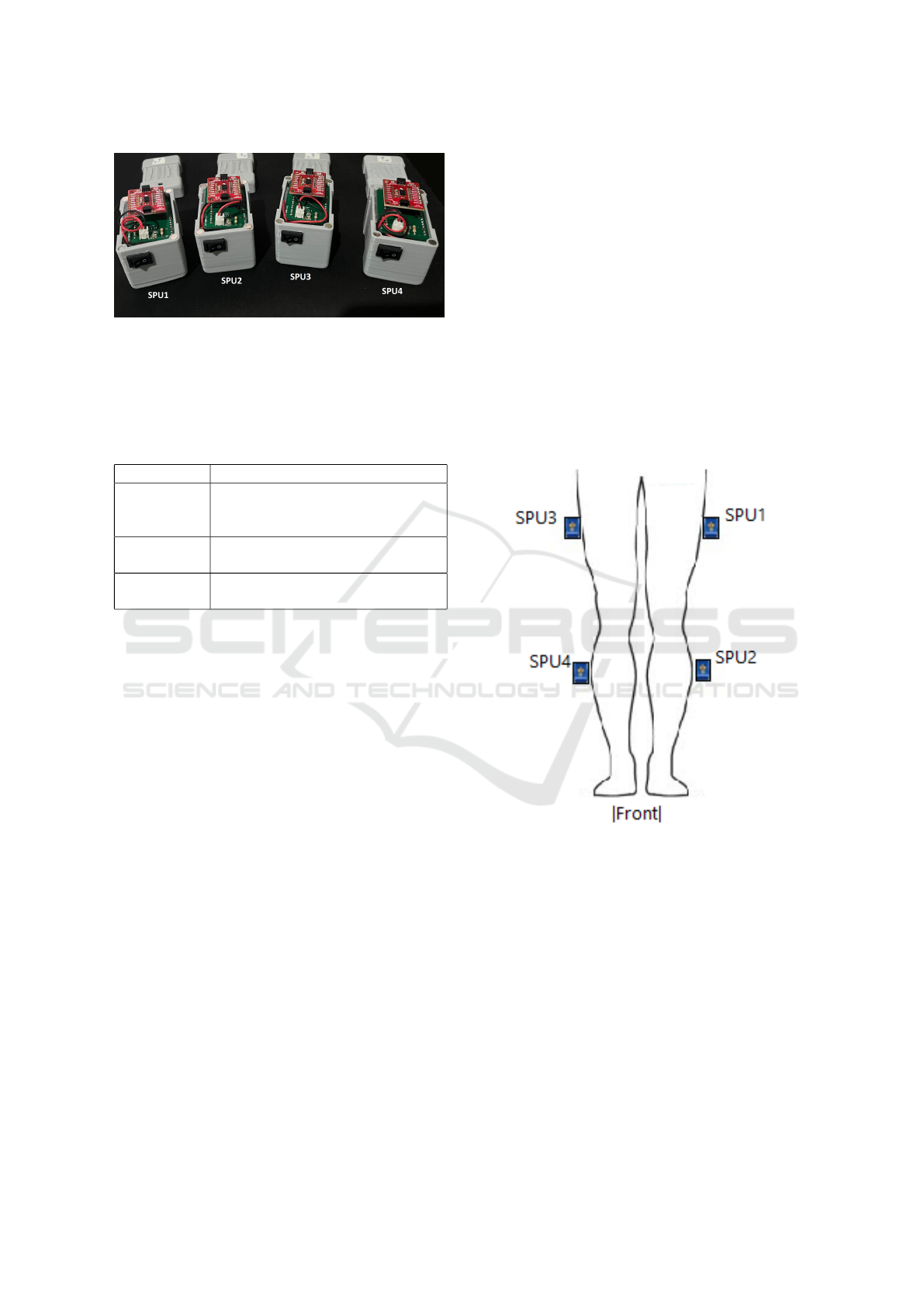
Figure 6: Wearable device used to collect individual’s
movement data.
Sensor Processing Unit – SPU
The SPUs are incorporated by the sensors with the
following hardware in Table 1:
Table 1: SPU hardware description.
Component Description
BNO080
IMU
9-degree inertial sensor comprising
accelerometer, gyroscope,
and magnetometer readings.
Li-ion
battery
power source for the device.
NodeMCU
ESP-32
Hardware platform based on
Espressif ESP-32 solution.
Robustness requirements are essential for con-
structing these devices, such as weight and size (Niu
et al.(2018)). As the sensors developed are made
of lightweight components, they are comfortable for
users, allowing free movement to carry out activities.
Sensors can capture data from accelerometer, gy-
roscope, and magnetometer, in addition to quater-
nions. For the representation of motion in the vir-
tual twin, we will use gyroscope data comprising val-
ues for the X, Y, and Z vectors. When the sensor
rotates on any of these vectors, it returns a positive
or negative value related to the angle the sensor has
been rotated. The data transmission rate of the gyro-
scope for each SPU is around 50 ms, representing 20
samples per second, allowing us to accurately repli-
cate user movements in the virtual twin. A low data
update rate is important because higher values can
cause desynchronization in the representation of vir-
tual twin movements. This problem can also occur
if there is a failure in data transmission due to inter-
ference or the drop of any SPU; the user’s movement
may have changed while the data was not sent, caus-
ing the virtual twin to become desynchronized.
Each sensor was configured to send data every 50
milliseconds via Bluetooth connection, allowing for
the transmission of 20 samples per fraction of a sec-
ond. Combining the data from the 4 sensors results
in a total of 80 data samples per second. Consider-
ing floating-point values of 4 bytes each for the three
axes, we have a total of 12 bytes per sensor reading.
Multiplying this by the 4 sensors and 80 samples, we
achieve a rate of 960 bytes per second, a value well
below the total capacity of a Bluetooth connection,
providing sufficient margin for complete data trans-
mission.
Another crucial aspect is the alignment of the ro-
tation axis values with those used in the virtual twin.
On the sensor hardware board, there are guidelines
for the positioning of the X, Y, and Z axes, and if the
board is oriented differently, it is necessary to adjust
the values to correctly relate the data.
In the current state, both the hardware and its em-
bedded software are fully developed, making it possi-
ble to capture all types of data mentioned earlier and
transmit them via Bluetooth.
Figure 7: Wearable device positions.
The System - In the development of the system, the
interface and the virtual twin proved to be highly re-
sponsive. By integrating gyroscope values into the
avatar’s control variables, we were able to precisely
control the rotation axes of its legs. Initially, the fea-
sibility of using quaternions to replicate user move-
ment in the virtual twin was tested. However, despite
Unity accepting the insertion of these values for ob-
ject modification, it was observed that when directly
applied to the avatar, it did not respond correctly to
user movements. On the other hand, the use of gy-
roscope data allowed for an exact reproduction of the
device’s movement in the virtual object, as shown in
the images below.
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
514

(a) Sensor on 0° rotation. (b) Sensor on 45° rotation.
(c) Sensor on 90° rotation. (d) Sensor on -45° rotation.
Figure 8.
3.2.2 System Interfaces and Functionalities
We employed the Unity framework in developing the
mobile application. This tool is an engine for creating
games that allow the creation and control of virtual
characters easily and intuitively, in addition to provid-
ing several tools for interface design. We developed
a 3D character and a test scenario for the presented
prototype. Figure 9 displays the application’s main
screen.
The digital twin behaves according to the user’s
movement, representing an abstraction of the mea-
surements provided by the model. The data will be
passed from the sensors to the server, which will save
them in the database with the time and the route of the
user captured by GPS. The same data will be passed to
the application, which will map the movement in the
virtual twin’s body to replicate the movement, while
the AI module classifies the movement and presents
the result in the ”Movement Type” field, being able to
obtain values standing, walking or running.
Another critical part of the application will be the
user history containing a chronological representation
of the captured data. On this screen, it will be possible
to see the path taken by the user represented on a map
using the GPS data retrieved by the application. It will
also be possible to visualize the movement performed
by the user along the way, represented by the virtual
twin and the classification of the movement.
Figure 9: Virtual twin and UI prototype.
Finally, the application will also allow the user to
collect statistics containing quantitative data such as
the time spent performing a specific activity (stand-
ing, walking, or running), the distance covered by the
user according to the type of movement, and the time
spent on the activity. These statistics are presented
through values and graphs.
Another feature is the configuration of specific pa-
rameters of the application. For instance, the user can
choose the number of days to store historical data and
clean it, the accuracy of movement classification, and
the status of sensors.
3.3 AI Module
The AI algorithm for classifying the wearable device
data uses LSTM (Long short-term memory) recur-
rent neural networks (RNN)(Hochreiter and Schmid-
huber(1997)). These deep learning networks are
commonly used to learn about events by time se-
ries analysis like HAR (Mekruksavanich and Jitpat-
tanakul(2021)).
The Power of Gyroscope Data: Advancing Human Movement Analysis for Walking and Running Activities
515

As a human activity, such as walking, depends on
information over time, this method becomes appro-
priate in this context. Thus, the data can be classified
and sent to the mobile app to present the digital gem
of the predicted activity.
For the evaluation of the algorithm, we used the
standard evaluation metrics, Precision, Recall, and
F1-Score (Hossin and Sulaiman(2015)). Precision 1,
shows the data classified as really belonging to a class,
true positive, Recall 2, makes a system evaluation to
find the positive samples of the set, and F1 - score 3,
the weighted harmonic mean between precision and
Recall.
Precision =
T P
T P + FP
(1)
Recall =
T P
T P + FN
(2)
F1-Score = 2 ×
Precision × Recall
Precision + Recall
(3)
True positives (T P) are data correctly classified by
the model. True negatives (T N) represent the same as
the negative class. The false positive (FP) refers to
the result classified incorrectly for the positive class,
and the false negative (FN) incorrectly for the neg-
ative category. Finally, the confusion matrix is also
applied to show the visualization of the distribution
of correct and incorrect classifications of each class.
3.3.1 The Dataset
The data used (dat(2024)) to create digital twins in
the mobile application and to train the artificial intel-
ligence model were captured and processed through
a wearable solution attached to the lower part of the
user’s body. This dataset was obtained by collect-
ing information from gyroscopes located on the user’s
legs, which record movements along the X, Y, and Z
axes. Additionally, the data includes the sensor iden-
tifier and the timestamp at which the record was cap-
tured. These data were collected with the aim of rec-
ognizing standing and walking activities. The dataset
contains information from each gyroscope, specifi-
cally along the X, Y, and Z axes, representing the
movements along these axes for each sensor.
For preliminary testing purposes of the AI model,
only data and classification of standing and walking
events were performed to validate training, predic-
tion, and classification, as well as data augmentation
on the data generated in sensor capture. The next step
is to collect more data related to these events, and also
to capture data related to the running event, which is
slightly more complex due to the user’s speed and the
stability required in the sensors to accurately capture
the data.
4 RESULTS AND
OPPORTUNITIES
This paper presents the initial findings of the sys-
tem, showcasing outcomes derived from the data
acquired through sensors and processed by the AI
model. Additionally, we outline various challenges
encountered in application development and share
insights gained throughout the development process
as valuable learning experiences in this segment.
The AI Model - We trained an AI system offline with
the data we collected. The system learned to classify
two main activities: standing and walking. We as-
sessed its performance using standard measures like
precision, recall, and F1-score for each activity, as
well as an overall average. The training process us-
ing an LSTM model proved effective.
Figure 10: Evaluation of the accuracy and loss values for
the training and validation sets.
The results of training the LSTM model are de-
picted in the figure 10. The graphs display a con-
sistent trend of convergence throughout each epoch,
indicating minimal deviation from the desired out-
come. This observation suggests that the model’s per-
formance was stable during the training process, with
no evidence of overfitting. Overall, the convergence
pattern reflects satisfactory progress in optimizing the
AI model for the intended task. Table 2 displays the
metrics for the LSTM.
Table 2: Metrics for the LSTM model.
Precision Recall F1-Score Support
stand 0.98 1.00 0.99 4851
walk 0.99 0.97 0.98 2696
Macro average 0.99 0.98 0.99 7547
Weighted average 0.99 0.99 0.99 7547
Global Accuracy: 99%
The Figure 11 displays the test results for the AI
model. In this test, we observe that the model accu-
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
516
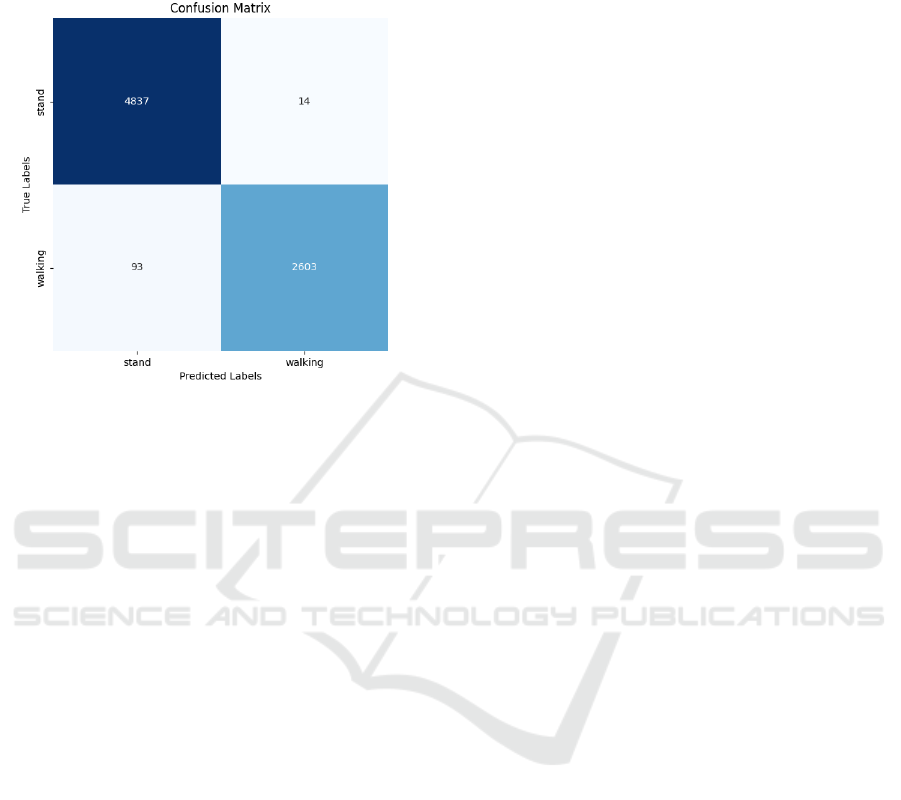
rately classified the data into the two classes in the
dataset. The results indicate that the LSTM model
can efficiently classify the sensor data.
Figure 11: Confusion Matrix.
Opportunities for Integrating the App with the
System - One of the main benefits of this type of
application is the possibility of improving the user’s
decision-making model through the information pro-
vided by the app. For example, the system can present
to the individual the activity performed on the inter-
face of a mobile device. This information presented
brings a gain for this purpose since the graphical rep-
resentation reinforces the classification made by the
AI model.
5 CONCLUSION AND FUTURE
WORK
In this work, we introduced an innovative system for
real data capture aiming to virtually reproduce and
classify walking and running activities. We utilized
gyroscope data to capture the rotation of axes in lower
human limbs’ movements, enabling a precise replica-
tion of these body parts’ motions in the virtual en-
vironment. Our results indicate that, by employing
specific devices such as sensors instead of generic de-
vices like smartwatches, more accurate and localized
data can be captured. This allows for a granular and
precise analysis of movement in each limb, in addi-
tion to faithful reproduction.
The main contribution of this work includes
proposing a mobile platform consisting of an inte-
grated hardware and software solution for reproduc-
ing real movements. We demonstrated that utiliz-
ing gyroscope data, with universal values, provides
a more consistent approach compared to quaternion
data. Furthermore, we discussed the significance
of applying this technology in the orthopedic and
sports field, emphasizing the relevance of studying
human movement to understand anatomical factors
influencing movement mechanics. The proposed sys-
tem serves as a starting point for developing more pre-
cise and optimized devices for various types of human
data capture and analysis.
As future work, we highlight several promising di-
rections for the continuation of this research. Firstly,
we aim to further enhance the system by exploring
different machine learning techniques and AI algo-
rithms for activity classification. Additionally, we
plan to broaden the system’s scope to include a wider
variety of physical activities, allowing for a more
comprehensive application in different contexts.
Integrating more sensors and optimizing the hard-
ware are crucial considerations to improve the sys-
tem’s accuracy and effectiveness. We also intend
to implement a more robust communication inter-
face between the real and virtual worlds, enabling an
even more precise reproduction of the environment in
which activities are being performed.
Moreover, collecting data in real-world scenarios
with a more diverse sample can enhance the general-
ization of the AI model, making it more robust across
different contexts and for various users. Finally, we
contemplate expanding the system to practical appli-
cations, such as health monitoring and personalized
training, to maximize its impact on human well-being.
These future directions aim to refine the ap-
plication and effectiveness of the proposed system,
enabling significant advancements in the fields of
biomechanics, health, and physical training within the
realm of computer science.
ACKNOWLEDGMENT
The authors would like to thank CAPES, CNPq and,
Universidade Federal de Ouro Preto for support-
ing this work. This study was financed in part by
the Coordenac¸
˜
ao de Aperfeic¸oamento de Pessoal de
N
´
ıvel Superior - Brasil (CAPES) - Finance Code 001.
REFERENCES
2024. Gyroscope Human Stand and Walking Data.
https://www.kaggle.com/datasets/patricknunes/
gyroscope-human-stand-and-walking-data.
Patrick BN Alvim, Jonathan CF da Silva, Vicente JP
The Power of Gyroscope Data: Advancing Human Movement Analysis for Walking and Running Activities
517

Amorim, Pedro SO Lazaroni, Mateus Coelho Silva,
and Ricardo AR Oliveira. 2023. Towards a mobile
system with a new wearable device and an AI appli-
cation for walking and running activities. In Anais do
L Semin
´
ario Integrado de Software e Hardware. SBC,
155–166.
Ong Chin Ann and Lau Bee Theng. 2014. Human activ-
ity recognition: a review. In 2014 IEEE international
conference on control system, computing and engi-
neering (ICCSCE 2014). IEEE, 389–393.
Alice Bonnefoy-Mazure and St
´
ephane Armand. 2015. Nor-
mal gait. Orthopedic management of children with
cerebral palsy 40, 3 (2015), 567.
Mikołaj Borowski-Beszta and Michał Polasik. 2020. Wear-
able devices: new quality in sports and finance. Jour-
nal of Physical Education and Sport 20 (2020), 1077–
1084.
Y. Celik, S. Stuart, W.L. Woo, and A. Godfrey. 2021.
Gait analysis in neurological populations: Progres-
sion in the use of wearables. Medical Engineering
& Physics 87 (2021), 9–29. https://doi.org/10.1016/
j.medengphy.2020.11.005
Gloria Cosoli, Luca Antognoli, Valentina Veroli, and
Lorenzo Scalise. 2022. Accuracy and Precision
of Wearable Devices for Real-Time Monitoring of
Swimming Athletes. Sensors 22, 13 (2022), 4726.
Florenc Demrozi, Graziano Pravadelli, Azra Bihorac, and
Parisa Rashidi. 2020. Human activity recognition
using inertial, physiological and environmental sen-
sors: A comprehensive survey. IEEE Access 8 (2020),
210816–210836.
Norbert Gy
˝
orb
´
ır
´
o,
´
Akos F
´
abi
´
an, and Gergely Hom
´
anyi.
2009. An activity recognition system for mobile
phones. Mobile Networks and Applications 14, 1
(2009), 82–91.
Sepp Hochreiter and J
¨
urgen Schmidhuber. 1997. Long
short-term memory. Neural computation 9, 8 (1997),
1735–1780.
Mohammad Hossin and Md Nasir Sulaiman. 2015. A
review on evaluation metrics for data classification
evaluations. International journal of data mining &
knowledge management process 5, 2 (2015), 1.
Preeti Khera and Neelesh Kumar. 2020. Role of machine
learning in gait analysis: a review. Journal of Medical
Engineering & Technology 44, 8 (2020), 441–467.
´
Oscar D. Lara and Miguel A. Labrador. 2012. A mo-
bile platform for real-time human activity recogni-
tion. (2012), 667–671. https://doi.org/10.1109/
CCNC.2012.6181018
Seunghwan Lee, Moonseok Park, Kyoungmin Lee, and Je-
hee Lee. 2019. Scalable muscle-actuated human sim-
ulation and control. ACM Transactions On Graphics
(TOG) 38, 4 (2019), 1–13.
Tung-Wu Lu and Chu-Fen Chang. 2012. Biomechanics of
human movement and its clinical applications. The
Kaohsiung journal of medical sciences 28, 2 (2012),
S13–S25.
Rachel Mason, Liam T Pearson, Gillian Barry, Fraser
Young, Oisin Lennon, Alan Godfrey, and Samuel Stu-
art. 2023. Wearables for running gait analysis: A sys-
tematic review. Sports Medicine 53, 1 (2023), 241–
268.
Sakorn Mekruksavanich and Anuchit Jitpattanakul. 2021.
Biometric User Identification Based on Human Activ-
ity Recognition Using Wearable Sensors: An Experi-
ment Using Deep Learning Models. Electronics 10, 3
(2021). https://doi.org/10.3390/electronics10030308
Anat Mirelman, Shirley Shema, Inbal Maidan, and Jef-
fery M. Hausdorff. 2018. Chapter 7 - Gait.
In Balance, Gait, and Falls, Brian L. Day and
Stephen R. Lord (Eds.). Handbook of Clinical Neu-
rology, Vol. 159. Elsevier, 119–134. https://doi.org/
10.1016/B978-0-444-63916-5.00007-0
Jose Moon, Dongjun Lee, Hyunwoo Jung, Ahnryul Choi,
and Joung Hwan Mun. 2022. Machine learning strate-
gies for low-cost insole-based prediction of center of
gravity during gait in healthy males. Sensors 22, 9
(2022), 3499.
Linwei Niu, Qiushi Han, Tianyi Wang, and Gang Quan.
2018. Reliability-aware energy management for em-
bedded real-time systems with (m, k)-hard timing
constraint. Journal of Signal Processing Systems 90
(2018), 515–536.
L
´
eonie Pacher, Christian Chatellier, Rodolphe Vauzelle,
and Laetitia Fradet. 2020. Sensor-to-segment calibra-
tion methodologies for lower-body kinematic analysis
with inertial sensors: A systematic review. Sensors
20, 11 (2020), 3322.
Hari Prasanth, Miroslav Caban, Urs Keller, Gr
´
egoire Cour-
tine, Auke Ijspeert, Heike Vallery, and Joachim
Von Zitzewitz. 2021. Wearable sensor-based real-time
gait detection: A systematic review. Sensors 21, 8
(2021), 2727.
Alexander Schiewe, Andrey Krekhov, Frederic Kerber, Flo-
rian Daiber, and Jens Kr
¨
uger. 2020. A Study on
Real-Time Visualizations During Sports Activities on
Smartwatches. In 19th International Conference on
Mobile and Ubiquitous Multimedia. 18–31.
Sara Taghavi, Fardjad Davari, Hadi Tabatabaee Malazi, and
Ahmad Ali Abin. 2019. Tennis stroke detection us-
ing inertial data of a smartwatch. In 2019 9th Interna-
tional Conference on Computer and Knowledge Engi-
neering (ICCKE). IEEE, 466–474.
Carole A Tucker, Jose Ramirez, David E Krebs, and
Patrick O Riley. 1998. Center of gravity dynamic sta-
bility in normal and vestibulopathic gait. Gait & pos-
ture 8, 2 (1998), 117–123.
Peng Wang, Hongyi Liu, Lihui Wang, and Robert X. Gao.
2018. Deep learning-based human motion recogni-
tion for predictive context-aware human-robot collab-
oration. CIRP Annals 67, 1 (2018), 17–20. https:
//doi.org/10.1016/j.cirp.2018.04.066
Yang Xu and Ting Ting Qiu. 2021. Human activity recogni-
tion and embedded application based on convolutional
neural network. Journal of Artificial Intelligence and
Technology 1, 1 (2021), 51–60.
Eric Yiou, Teddy Caderby, Arnaud Delafontaine, Paul Four-
cade, and Jean-Louis Honeine. 2017. Balance control
during gait initiation: State-of-the-art and research
perspectives. World journal of orthopedics 8, 11
(2017), 815.
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
518

Tirra Hanin Mohd Zaki, Musab Sahrim, Juliza Jamaludin,
Sharma Rao Balakrishnan, Lily Hanefarezan Asbu-
lah, and Filzah Syairah Hussin. 2020a. The Study
of Drunken Abnormal Human Gait Recognition using
Accelerometer and Gyroscope Sensors in Mobile Ap-
plication. (2020), 151–156. https://doi.org/10.1109/
CSPA48992.2020.9068676
Tirra Hanin Mohd Zaki, Musab Sahrim, Juliza Jamaludin,
Sharma Rao Balakrishnan, Lily Hanefarezan Asbu-
lah, and Filzah Syairah Hussin. 2020b. The study of
drunken abnormal human gait recognition using ac-
celerometer and gyroscope sensors in mobile applica-
tion. In 2020 16th IEEE International Colloquium on
Signal Processing & Its Applications (CSPA). IEEE,
151–156.
Zhendong Zhuang and Yang Xue. 2019. Sport-related hu-
man activity detection and recognition using a smart-
watch. Sensors 19, 22 (2019), 5001.
The Power of Gyroscope Data: Advancing Human Movement Analysis for Walking and Running Activities
519
