
Using Soft Computing and Computer Vision to Create and Control an
Integrated Autonomous Robotic Manipulator Process
Jo
˜
ao Ant
ˆ
onio Toledo Rodrigues
1 a
, Samuel Dos Anjos
1 b
, Mateus Coelho Silva
1,2 c
,
Ricardo C. C
ˆ
amara de M. Santos
1 d
and Ricardo Augusto Rabelo Oliveira
1 e
1
Departmento de Computac¸
˜
ao - DECOM, Universidade Federal de Ouro Preto - UFOP, Ouro Preto, Brazil
2
Instituto Tecnol
´
ogico Vale, Universidade Federal de Ouro Preto - UFOP, Ouro Preto, Brazil
Keywords:
Soft Computing, Robotic Manipulator, Object Detection, Evolutionary Algorithm, Inverse Kinematics.
Abstract:
The development and control of an integrated autonomous robotic manipulation process requires a focus on the
convergence of technologies such as soft computing, object detection, robotic arm engineering, and direct and
inverse kinematics. For instance, the inverse kinematics issue can be targeted using soft computing instead
of challenging mathematical applications. This paper explores using soft computing systems, an algorithm
that produces approximate solutions to complex problems and phenomena. Thus, the use of soft computing
proved valid, given the accuracy and speed of the claw. The soft computing technology is based on an evo-
lutionary algorithm that allows us to create several points on a cartesian plane and mix them to implement
inverse kinematics. Our results showed that using soft computing, which is different from the traditional way,
leads to solid and functional results. The implementation involves integrating Arduino, Raspberry Pi 4.0, a
PWM model PCA9685, a camera, and six servo motors to create a robotic arm. The system employs video
streaming to transmit data to a local network, where the Raspberry Pi processes RGB to HSV images for
object identification. The present work in this paper has experiments for the accuracy and speed of the claw to
take a determinate object from the center and the side of the checkered board.
1 INTRODUCTION
Automation and robotics have been playing an in-
creasing role in our society, simplifying complex
tasks and performing essential functions in various
industries, as Royakkers et al. say in (Royakkers
and van Est, 2015). In this context, the value of
autonomous robot systems increases daily, and the
need to integrate them into our daily lives becomes
more apparent. From the manufacturing industry and
medicine facilities to the indoors of our houses, au-
tonomous robots are reshaping how we live and work.
In other roles, automation technology dominates
daily tasks, with self-driving cars, trucks, drones, ma-
chines for modern medical operations, and robot fa-
cilities in the industry. In this way, the prospect of a
future with technology for cleaning our house, mak-
a
https://orcid.org/0009-0005-3905-3163
b
https://orcid.org/0009-0001-0347-5461
c
https://orcid.org/0000-0003-3717-1906
d
https://orcid.org/0000-0002-2058-6163
e
https://orcid.org/0000-0001-5167-1523
ing up our beds, storing clothes and utensils is getting
closer. In this way, those new kinds of facilities will
become crucial for the sake of an easy life. According
to Raja et al. (Raja and Nagasubramani, 2018), tech-
nology significantly influences how students learn and
teachers teach. The introduction of technology into
the educational environment has made the teaching-
learning process more interactive, efficient, and glob-
alized.
The article also emphasizes using soft computing
techniques that are valuable for their ability to han-
dle uncertainty, imprecision and partial truth. In this
way, soft computing can achieve and improve chal-
lenges and issues in modern agriculture, such as re-
source management, labor, technology advancements
in other industries, product quality, modernization, or-
ganic farming and sustainable practices. The article
(Yardimci, 2007) by Yardimci et al. reviews the appli-
cations of fuzzy logic-neural networks methodology
utilized in the clinical science of medicine. Further-
more, the article showed an interest in applying soft
computing methodologies in genetics, physiology, ra-
diology, cardiology, and neurology.
820
Rodrigues, J., Anjos, S., Silva, M., Santos, R. and Oliveira, R.
Using Soft Computing and Computer Vision to Create and Control an Integrated Autonomous Robotic Manipulator Process.
DOI: 10.5220/0012705600003690
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 26th International Conference on Enterprise Information Systems (ICEIS 2024) - Volume 1, pages 820-827
ISBN: 978-989-758-692-7; ISSN: 2184-4992
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
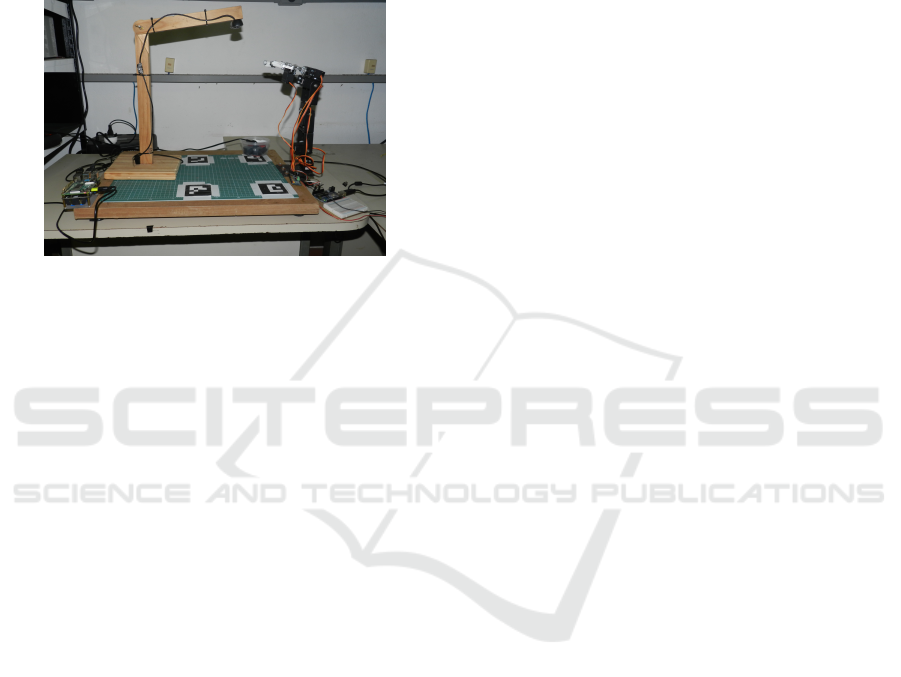
With that in mind, our work describes the imple-
mentation and use of a modern system of a robot arm
that performs the catch of an object inside the field of
vision of the camera. The image stream comes from a
Raspberry Pi working with a Pi Camera. The arm of
the robot is made of six servos motors, an Arduino, a
Raspberry Pi 4.0, a camera, and a PWM controller, as
we can see in Figure 1.
Figure 1: Experimental apparatus used in this work.
In this way, it is possible to create an arm that can
perform tasks that are interesting to practitioners of
technology or even industrial uses. Thus, the main
goal of this work is:
• The employment of soft computing and computer
vision techniques to create an autonomous robotic
manipulator process.
In the remainder of this work, Section 2 presents
the theoretical baseline of this work. Section 3 dis-
cusses how this work relates to the literature. Section
4 presents the methodology employed to create the
solution, and Section 5 displays the results of the val-
idation experiments. Finally, Section 6 displays the
conclusions obtained from this work.
2 THEORETICAL REFERENCES
This section introduces some background that sus-
tains the work. We explored the concepts of soft com-
puting, robotic manipulators, the integration of au-
tonomous robots, and kinematics.
2.1 Soft Computing
Soft computing is system that offers a versatile and
adaptable approach to problem-solving, rendering it
a valuable asset in tackling intricate, ambiguous, and
uncertain challenges across diverse fields such as:
• Decision-Making.
• Optimization in Manufacturing.
• Predictive Maintenance.
• Supply Chain Management.
• Energy Management.
• Quality Control.
• Human-Machine Interaction.
• Smart Infrastructure and Cities.
• Healthcare Diagnostics.
• Financial Forecasting.
The article (Aguado and Cantanhede, 2010) by
Aguado et al. talks about fuzzy logic. The logi-
cal system introduced by fuzzy logic extends beyond
Boolean reasoning, moving beyond the binary notion
of merely present or not. Rather than settling for a
binary perspective, the aim is to discern the extent
to which an element is present or absent. For this,
sideways glance fuzzy logic is a mathematical ap-
proach that handles uncertainty by allowing for de-
grees of truth, practical in situations where informa-
tion is imprecise or ambiguous. In our work, the evo-
lutionary algorithm decides by itself. The evolution-
ary algorithms are another pillar that sustains the area,
as Bartz-Beielstein et al. says in (Bartz-Beielstein
et al., 2014). These algorithms refer to a category of
population-based stochastic direct search techniques
that, in a certain way, imitate the processes of natural
evolution. Another cornerstone is the neural networks
that M
¨
uller et al. say in (M
¨
uller et al., 1995). The
human brain’s architecture inspires these techniques.
The computational models are designed for machine
learning and artificial intelligence. The artificial neu-
rons, organized in layers, can learn complex patterns
and relationships from data.
2.2 Manipulator Process
The manipulation process is deliberately manipulat-
ing objects or substances using a robotic manipulator.
This specialized mechanical device is intricately de-
signed to execute an array of tasks, encompassing but
not limited to handling, lifting, positioning, and mov-
ing objects with meticulous precision and control.
Within industrial operations, the manipulator pro-
cess extends its functionality to tasks such as as-
sembly, packaging, sorting, inspection, and welding.
These activities necessitate a high degree of accuracy
in controlling the movements of the robotic manipu-
lator. In essence, as Raibert et al. discuss in (Raibert,
1978), the manipulator process signifies the strategic
application of a robotic manipulator within specific
production or operational contexts, where its dexter-
ity and automated capabilities play a pivotal role in
enhancing efficiency and precision.
Using Soft Computing and Computer Vision to Create and Control an Integrated Autonomous Robotic Manipulator Process
821

In this way, the Manipulator process stands as
a cornerstone in modern industrial operations, rep-
resenting a sophisticated approach to the controlled
manipulation of materials through robotic manipula-
tors. Mass production shows the highest level of au-
tomation in the industry is paramount, as displayed
by Krasilnikyants et at. in (Krasilnikyants et al.,
2013). In this context, the manipulator process is criti-
cal in achieving and maintaining this crucial element.
Robotic manipulators, equipped with advanced sen-
sors, actuators, and control systems, contribute to a
level of precision unattainable through manual labor
alone. However, using computational elements like
Raspberry Pi makes it possible to create a whole new
world of possibilities.
3 RELATED WORKS
The implementation of the robotic gripper is directly
related to an embedded system. In this sense, it is nec-
essary to understand how the elements interact with
each other.
3.1 Soft Computing in Robotics
The Use of Evolutionary Algorithms article mentions
the use of evolutionary algorithms, specifically for the
robotic claw’s movement based on the four spots of
the checkered board. This soft computing system,
named evolutionary algorithms, contributes to the dy-
namic movement of the robotic arm.
The article (Lopez-Franco et al., 2018) by Lopez
et al. shows that inverse kinematics is a crucial fac-
tor in allowing a robotic arm to achieve its objec-
tive, defining the angle settings applied to each ac-
tuator to make this possible. With that here, the fol-
lowing article addresses a possible solution to the in-
verse kinematics problem using soft computing meth-
ods. The article proposes using a CMA-ES algorithm,
which presents superior performance among other al-
gorithms evaluated through statistical tests. The re-
sults defend an approach used as a promising tech-
nique for solving inverse kinematics problems in the
movement of robotic arms. The use of the algorithm
called CMA-ES makes non-linear and non-convex
optimization.
The article (Kumar et al., 2017) by Kumar et
al. uses a mathematical way with soft computing to
solve inverse kinematics. In this sense, they explored
mathematical equations that relate the spatial coordi-
nates of the desired endpoint with the angles of the
robot’s joints. These equations are derived based on
the geometry and kinematic structure of the robot.
Then, they apply soft computing techniques to opti-
mize fuzzy logic controllers. In developing this work,
the way to apply inverse kinematics with soft comput-
ing did not use complex math manipulation and fuzzy
logic.
The article (Chin et al., 2020) by Chin et al. dis-
cusses the combination of parameterized analytical
models, the Gaussian models, and neural networks
(NN). In this way, they apply this technique to im-
prove the control and sensing of soft robotic systems.
The innovation is also present in applying soft com-
puting to deal with soft systems’ stochastic and non-
linear dynamics. Besides that, they used soft com-
puting techniques about control and sensing, using a
model that can learn and understand the terrain that is
to, but it needs help in modeling and training the sys-
tem. This way, our work has a different aspect when
using the HSV system of vision and soft computing.
The facilities to implement and make the code valid
in different situations.
3.2 Robotic Manipulator Control
The article (Hock and Sedo, 2018) by Hock et al.
presents two main techniques for solving the inverse
kinematics problem: analytical and numerical meth-
ods. The joint variables are solved analytically in the
analytical method according to the given configura-
tion data. In the numerical method, the joint variables
are obtained based on numerical techniques. The pa-
per focuses on the analytical solution of the manipu-
lators rather than the numerical solution. On the other
hand, our article uses direct kinematics to lead us to
a universal solution for the coordinates. As such, as
the experiment presents, there is no real difference be-
tween the places that the arm is leading to, taking us
to a faster response to the arm and keeping the preci-
sion.
The article (Chandana et al., 2015) by Chandana
et at. proposes a smart surveillance system for home
and office security. The system uses Raspberry Pi, a
gyroscopic sensor, and a Raspberry Pi camera to de-
tect movement, capture images, and send email alerts
to the user. In our article, the data transmission within
the system is facilitated through video streaming to a
local network, and the Raspberry Pi processes RGB
to HSV images. This innovative approach allows for
real-time data transmission and processing, contribut-
ing to the efficiency of the integrated autonomous
robotic manipulator process.
The article (Niloy et al., 2021) by Niloy et al. re-
views the main challenges in the design and control of
autonomous robots for application in indoor and out-
door environments. The choice of robot components
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
822

and models is considered to alleviate some problems
related to the movement and perception of robots con-
cerning the environment in which they are located. It
also relates to mapping and location, which are essen-
tial for the equipment to function correctly. In addi-
tion, neural network training techniques used to en-
sure improvements in robot control and autonomy are
mentioned. In this idea, our work uses the system of
HSV to perform arm manipulation better and create a
model to work in different places.
The article (Deepak et al., 2012) by Deepak et
al. uses Denavit Hartenberg parameters to create a
mobile arm manipulator. This way, the article uses
direct kinematics for the manipulator process based
on mathematical formulation. In this way, our article
proposes a different approach with inverse kinemat-
ics to solve the problem. In this way, we reach the
angles of the servo’s motor by the final point and not
the final point by the angles of the servo’s motor. This
difference is because this process only requires a little
mathematical formulation, as it uses an evolutionary
algorithm.
The article by Xu et at. (Xu et al., 2005) used a
mathematical formulation similar to the article above
but to solve inverse kinematics. In this way, they use
a matrix model with Denavit Hartenberg parameters
to obtain orientation and the end position of angles.
With the matrix to solve, they get the position of joint
angles. Our article came with a different approach. It
does not require a direct solution for the joint angles
and, with the evolutionary algorithm, creates an easier
way to get the desired angles for the robotic arm.
4 METHODOLOGY
This work presents soft computing techniques to cre-
ate an integrated autonomous arm manipulator. The
implementation of the project used an Arduino, a
Raspberry Pi 4.0, a camera, six servo motors, a check-
ered plane, and software to receive the information
and process it. The idea is to create a robotic arm
to recognize targetable objects according to the hue,
saturation, and value (HSV) color system. The data
is transmitted through video streaming to a local net-
work by installing the Raspberry Pi Cam Web Inter-
face software on the Raspberry Pi. This software is
responsible for enabling the transmission and access
of camera data over the Wi-Fi network.
From there, the data collected by the camera will
be available for access through an IP address provided
by the software. The data will then be received on the
primary device, which captures the RGB images pro-
vided by the camera and makes a transformation to
HSV. These images are then processed by software
responsible for converting the data into a checkered
plane, which the object identification system will use.
After the identification system has read the data, the
necessary coordinates for the robotic arm to reach its
objective are sent to the Raspberry Pi 4.0 using a USB
cable, which will transmit the data to the Arduino. In
sequence, the Arduino will act, ensuring the move-
ment of the arms towards the given coordinates.
The arm movement is performed by applying the
concepts of direct and inverse kinematics, from which
the necessary information for the arm movement is
provided, such as the current position of the arm and
the possible combinations of angles required at each
actuator for the system to reach the desired point. The
locomotion of the part is made out by applying the
concepts of direct kinematics, which calculates the
current position of the arm based on the recorded po-
sitions in its joints, and inverse kinematics, which cal-
culates the possible combinations of angles required
at each actuator for the system to reach the desired
point.
Based on the calculations performed by these two
methods, it is possible to precisely control the arm
movement, from its departure from the initial point to
contact with the target and return to the original po-
sition. Is this way, direct kinematics deals with com-
puting the position and orientation of the tool refer-
ence system in relation to the base system. On the
contrary, inverse kinematics involves unraveling the
enigma: starting with the desired position and ori-
entation of the end travel, it’s about discovering the
myriad ways joint angles can join forces to bring that
vision to life.
The conversion from RGB to HSV occurs math-
ematically, and some functions help in the process.
The RGB parameters from 0 to 255 are sent to a
function that saturates the colors so that the differ-
ence between the minimum and maximum values is
highlighted. Thus, another function calculates the ho-
mography transformation, which leads to finding the
angles of the desired figure and highlighting it. In
this way, the process ends with highlighting points in
the figure to correct and parameterize the object’s per-
spectives.
We start a serial communication with the Rasp-
berry Pi and receive the image from the cameras that
are received in the code. Then, the system uses func-
tions to calculate the distance between points and or-
der them. Afterward, with the ArUco tags, the four
points are detected. Once the points are located, a
perspective transformation is performed on an image
based on the tags’ reference points.
After defining the points in the gridded space, the
Using Soft Computing and Computer Vision to Create and Control an Integrated Autonomous Robotic Manipulator Process
823
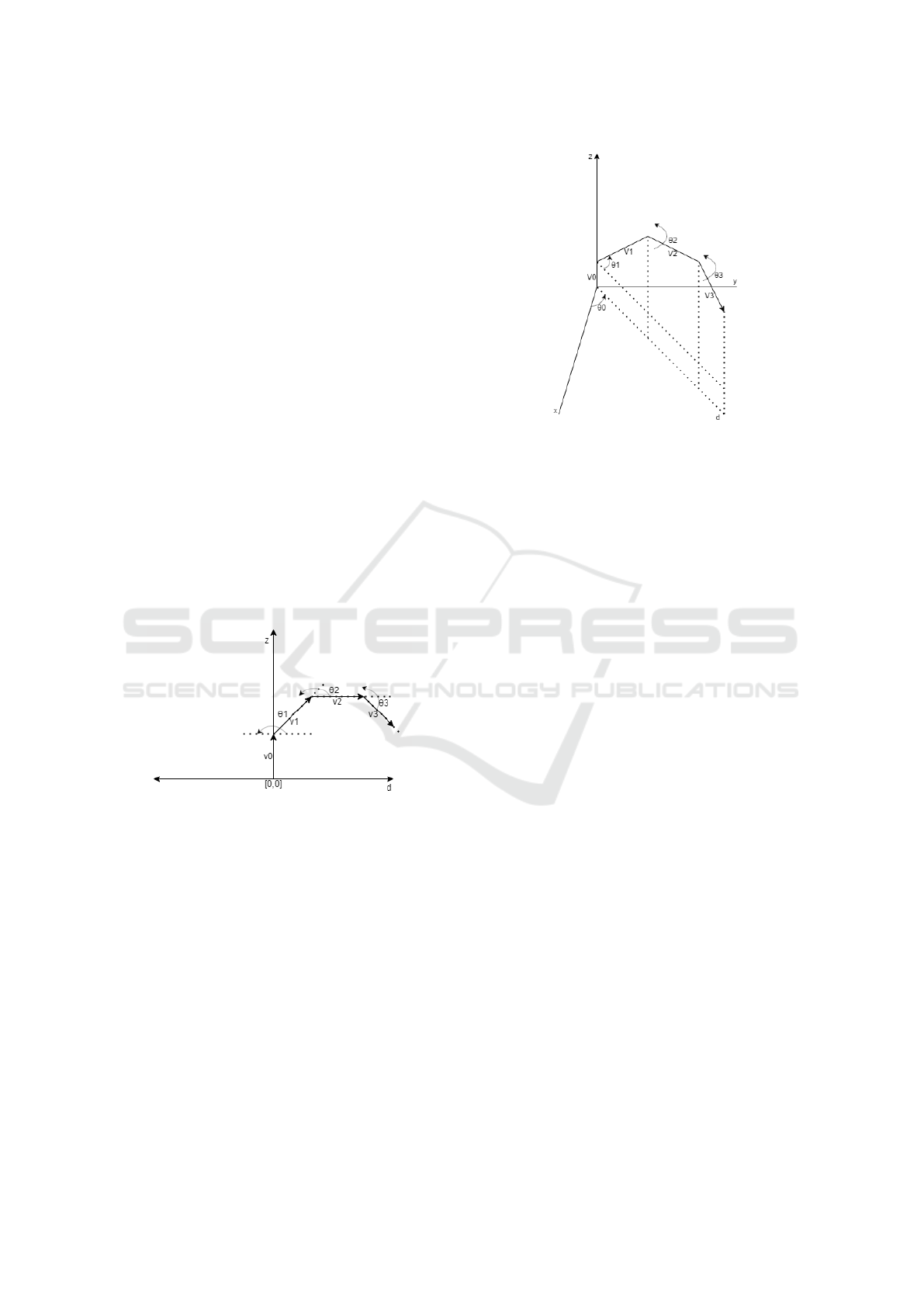
image is segmented to locate objects of interest us-
ing RGB and then, for better operation, transformed
to HSV. In this sense, the contours of the objects of
interest are obtained, and their centers are calculated,
which is reread by the system in an infinite loop. Af-
terward, the actual position of the objectives is calcu-
lated based on the ArUco tags.
After pressing the command key, the code sends
the pulse to the Arduino, which receives it and passes
it to the PWM controller that controls the servo mo-
tors so that they mimic an arm picking up an object,
which, shortly after, deposits the objective in a prede-
fined space in the code.
4.1 Direct Kinematics
The inverse kinematics problem is built on the
problem of how you could calculate angles of
(θ
0
,θ
1
,θ
2
,θ
3
) to reach a certain (x,y,z) spot and
make the system efficient. In this sense, it is possible
to solve the problem with a vector sum and Euclidean
distance approach. That is, the vector sum provides,
together with the Euclidean distance that the robotic
arm system can go from a three-dimensional system
to a two-dimensional system. As is evident in the fig-
ures Figure 2 and Figure 3.
Figure 2: Two-Dimensional Vector Representation of Arm
Configuration.
Direct kinematics is the relation of which angles
the servo motors need to be at to the control to have
precision. The formulation that describes this model-
ing is presented in Equations 2 and 1.
y = v
0
· sin(θ
1
)
+ v
1
· sin(θ
1
+ θ
2
)
+ v
2
· sin(θ
1
+ θ
2
+ θ
3
)
+ v
3
· sin(θ
1
+ θ
2
+ θ
3
+ θ
4
)
(1)
x = v
0
· cos(θ
1
)
+ v
1
· cos(θ
1
+ θ
2
)
+ v
2
· cos(θ
1
+ θ
2
+ θ
3
)
+ v
3
· cos(θ
1
+ θ
2
+ θ
3
+ θ
4
)
(2)
Figure 3: Three-Dimensional Vector Representation of Arm
Configuration.
To determine the best functioning of the claw, the
following parameters were used to write this article:
• x = 0 + 104 ×cos((pi/2+t1) + 75×cos((pi/2)+
t1+t2) + 35 × cos((pi/2)+t1 +t2 +t3) + 165 ×
cos(t1 + t2 +t3)
• y = 65 + 104×sin((pi/2+t1) + 75×sin((pi/2)+
t1 +t2) + 35 × sin((pi/2)+t1 + t2 +t3) + 165 ×
sin(t1 +t2 +t3)
4.2 Inverse Kinematics
Inverse kinematics combines the concept of plan di-
mensions and soft computing to have a method that
uses the target coordinates to process and find an an-
swer to position the manipulator tool in this mark.
This way, we explored the concepts of evolutionary
algorithms to complete the proposal, considering the
following steps:
• Population Initialization.
• Aptitude Assessment.
• Selection.
• Crossing over.
• Mutation.
• Replacement.
• Stopping Criterion and Optimal Solution.
To explain further we can see the Figure 4, the next
few’s paragraphs relate to the upper items.
We find the standard deviation of the range of ag-
gregated data in the repeated expression or field in
the chart dimensions. When the standard deviation
of fitness is less than 0.01, the population has con-
verged. Another stoppage criterion happens if the fit-
ness standard deviation is less than 0.1, but the system
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
824
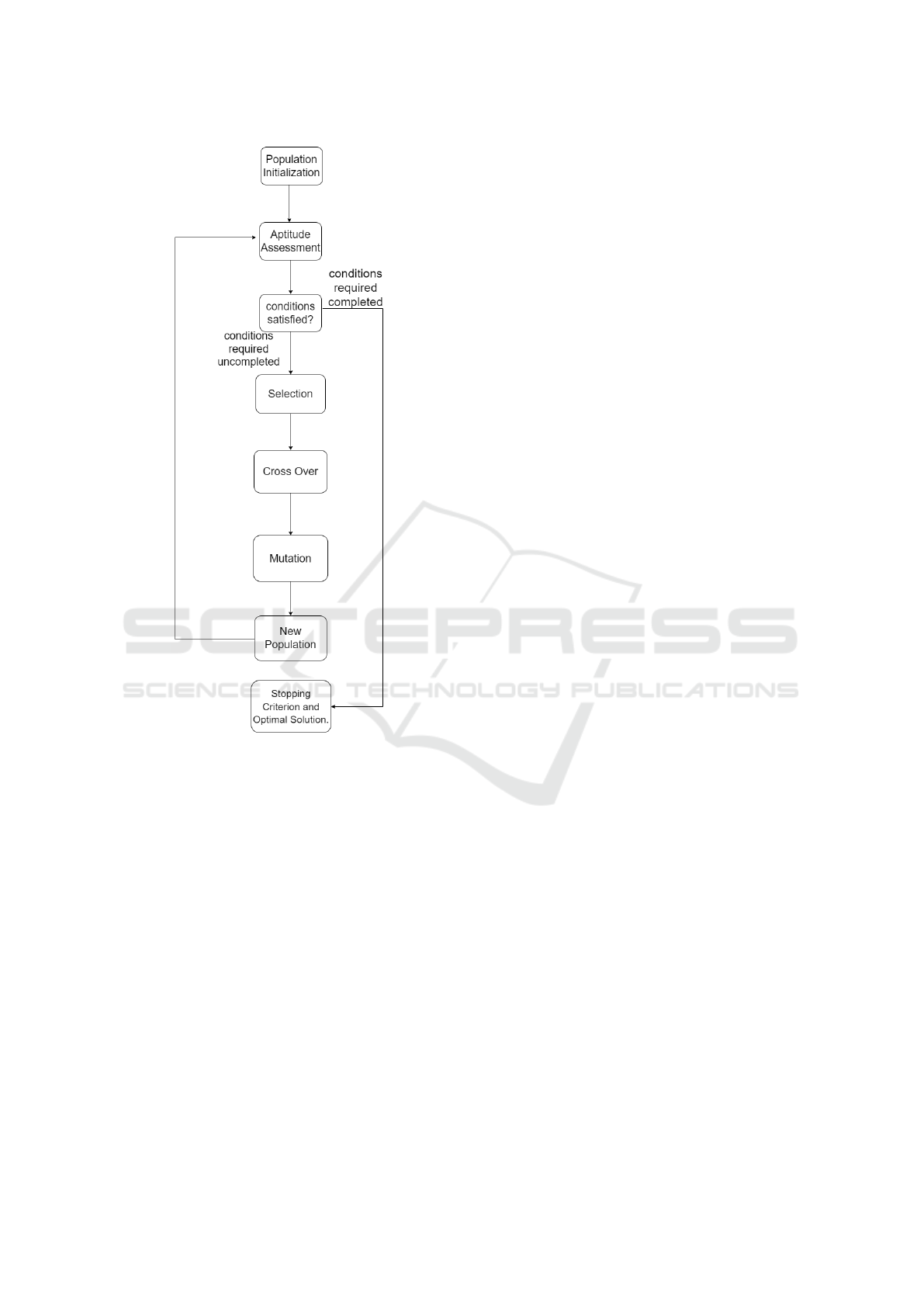
Figure 4: Flowchart of evolutionary algorithm.
has found a solution whose result is sufficiently satis-
factory. If this solution is found and the desired point
is less than 0.1cm, the solution is good enough. The
stages that compose the evolutionary algorithm are:
• Population Initialization: Initial generation of
random sets of gripper angles. The evolutionary
algorithm starts with a population of individuals,
each representing a potential solution to the prob-
lem. The individual is a set of angles of the robotic
arm.
• Aptitude Assessment: Inverse kinematics is used
to calculate the position of the end-effect with the
current joint angles, and the fitness function eval-
uates how close it is to the desired position. It
evaluates how good a solution is in relation to the
objective of the problem. The fitness function can
measure how close the angles are to the desired
position of the robotic arm.
• Selection: Individuals are selected proportion-
ally to their fitness (proximity). Individuals with
greater fitness are more likely to be selected for re-
production. In the algorithm, this selection mim-
ics the evolutionary process in nature. In this
case, the fittest individuals contain the values that
best adjust the arm’s position relative to the target
point.
• Crossover and Mutation: Pairs of individuals
are combined (crossover), and some individuals
mutate. The selected individuals are combined to
create offspring. This step involves combining the
joint angles of three parents to generate new sets
of angles.
• Replacement: The descendants and part of the
individuals from the previous generation form the
next population. That is, the new descendants re-
place part of the previous population. This stage
is a mimicry to select and maintain the best indi-
viduals from the previous generation.
• Stopping Criterion: The process is repeated un-
til a stopping criterion is reached, be it 0.1 cm or
population conversion.
4.3 Validation Experiments
The experiment carried out in this article involved the
use of computer vision and soft computing. To this
end, two parameters were used for the experiment.
One involves the number of hits of the claw to grab
the object, and the other is the time required by infer-
ence for the claw.
The experiments were carried out with 150 arm
tests using soft computing to solve the inverse kine-
matics at more than one point on the checkerboard.
From this perspective, we could observe, note, and
detail the algorithm’s response time and accuracy. For
this matter, the observed variables are:
• Capture success ratio in the central position con-
sidering 100 measurements;
• Capture success ratio in the lateral position con-
sidering 50 measurements;
• Inference time in central position versus lateral
position;
5 RESULTS
This section presents the experiments made in the lab-
oratory to test if the inverse kinematics have different
times of responses according to the local that the piece
is positioned on the checkered board Figure 5.
Using Soft Computing and Computer Vision to Create and Control an Integrated Autonomous Robotic Manipulator Process
825
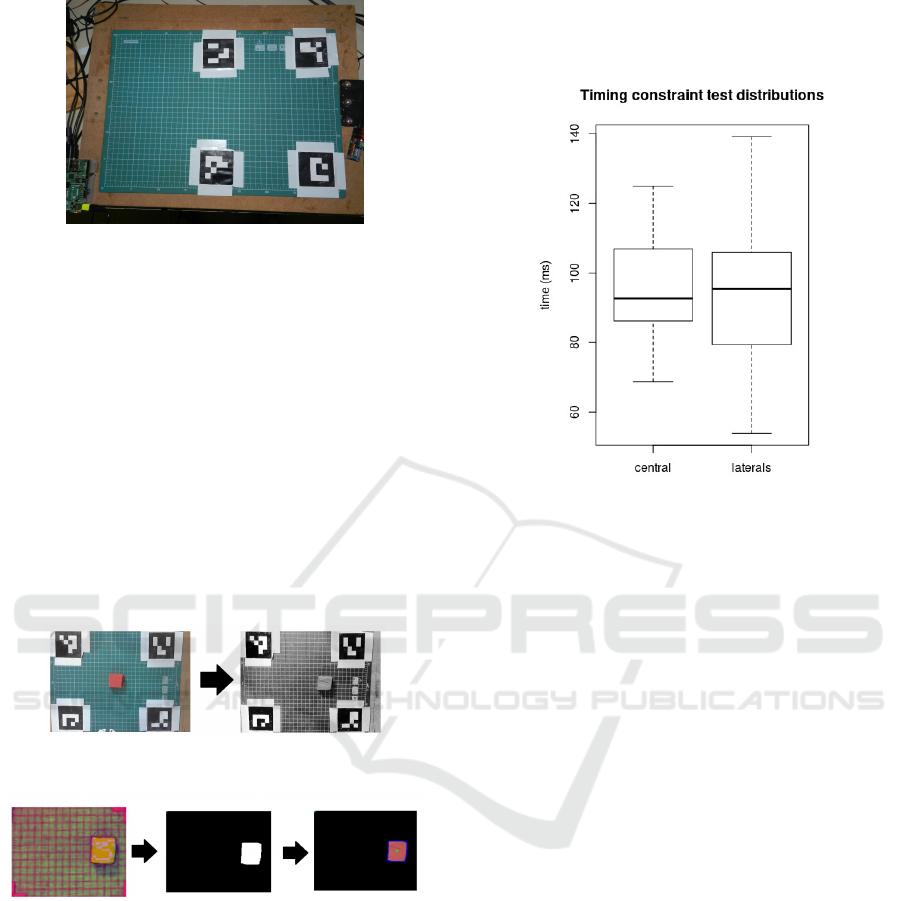
Figure 5: Checkered board.
We separated a red cube to set a condition for the
claw to have a better chance to hold it, and we can
evaluate the results based on the speed and accuracy
of the claw. Initially, it is important to learn that the
way the claw moves is based on a soft computing sys-
tem named evolutionary algorithms that, based on the
four spots of the checkered board, makes operations
to achieve that coordinate.
With the direct kinematics doing the servo motor
angle adjustments, what is needed is the image to use
inverse kinematics for the claw to go to the desired
point. In this way, the dynamic way that the algorithm
transforms the image to the read of RGB is shown in
Figure 6. Moreover, the continuous read is shown in
Figure 7.
Figure 6: Location of the ArUco tags to separate the work-
ing area on the checkerboard.
Figure 7: Continuous camera reading to find the target ob-
ject.
With that all settled, the red cube is positioned in
two ways. In the first and left one, it is positioned
right in the center, and in the second and right one, it
is on the spot next to the center but distant enough to
make a difference.
For the experiments, we took 100 rounds of the
claw, taking the red cube in the center, leading us to
the result of 92% of catches and 100 measurements of
how fast the claw went to take right in the center of the
checkered board. For the side positioning, we took 50
rounds of experiments, and we came to the result of
80% of catches and 50 measurements of how fast the
claw went to catch the red cube in a position next to
the center. Figure 8 depicts the boxplots containing
the results for both stages.
Figure 8: Timing distribution for both tests in a boxplot.
In this way, we evaluate and investigate the hy-
pothesis of the existence of differences between cen-
tral and lateral positioning concerning the time it takes
the algorithm to infer inverse kinematics. We per-
formed statistical tests to compare the two results we
had in the experiments.
The variance test evidenced that the two data sets’
value of 0.01 indicates no significant difference in
variances, suggesting that the variances are equal. Af-
ter that, we performed the t-test, demonstrating no
significant difference between the means of the two
groups. The averages are listed as 97ms and 99ms.
The conclusion is that the object location makes no
significant difference in the average inference time.
Figure 8 depicts the boxplot representing the tim-
ing distribution for both tests. Although the im-
age suggests different variances for the situations,
the variance tests indicate no significant difference
(p < 0.05)
6 CONCLUSIONS
The paper describes the development of a robotic arm
manipulator solution using soft computing and com-
puter vision. With that approach, the manipulator
process became more manageable because it did not
require a complex mathematical formulation as the
other articles presented in this work. The theory is
to create a path in which, even without mathematical
modeling, we have a functional and practical inverse
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
826

kinematics that is easier to implement.
This work is based on the concept of soft com-
puting. This perspective emphasizes the development
of novel solutions without the need for hard mathe-
matical modeling to solve them. Usual tools imple-
mented in soft computing appliances are neural net-
works, fuzzy logic, and evolutionary computing. In
this work, we used the latter to integrate the manipu-
lator application.
The methodology to create and validate the the-
ory that evolutionary algorithms would work for in-
verse kinematics has reasonable evidence of success,
as seen throughout the research. The results come
with limitations due to the quality of the claw, which
is imprecise. However, as we showed in the experi-
ments, the capture error rate does not give us a real
difference, even if the location of the targeted object
to be picked up is central or lateral on the checker-
board. The limitation already mentioned above is due
to the servo motors having a system that limits them
to 180 degrees of rotation and an error, both in the
camera view and the precision of the robotic claw, re-
quiring a new investment to change the claw itself.
As shown in related works, the usual way to cre-
ate inverse kinematics was with mathematical mod-
eling, but in our paper, we used evolutionary algo-
rithms. Future works include using novel elements to
integrate a more complex environment. For instance,
further steps can integrate a moving treadmill with an-
other camera to detect objects, resulting in the tread-
mill stopping to remove the object.
ACKNOWLEDGEMENTS
The authors would like to thank FAPEMIG, CAPES,
CNPq, Instituto Tecnol
´
ogico Vale, and the Federal
University of Ouro Preto for supporting this work.
This work was partially funded by CAPES (Finance
Code 001) and CNPq (306572/2019-2).
REFERENCES
Aguado, A. G. and Cantanhede, M. A. (2010). L
´
ogica
fuzzy. Artigo sem.
Bartz-Beielstein, T., Branke, J., Mehnen, J., and Mersmann,
O. (2014). Evolutionary algorithms. Wiley Interdisci-
plinary Reviews: Data Mining and Knowledge Dis-
covery, 4(3):178–195.
Chandana, R., Jilani, S., and Hussain, S. J. (2015).
Smart surveillance system using thing speak and rasp-
berry pi. International Journal of Advanced Re-
search in Computer and Communication Engineering,
4(7):214–218.
Chin, K., Hellebrekers, T., and Majidi, C. (2020). Ma-
chine learning for soft robotic sensing and control. Ad-
vanced Intelligent Systems, 2(6):1900171.
Deepak, B., Parhi, D. R., and Amrit, A. (2012). Inverse
kinematic models for mobile manipulators. Caspian
Journal of Applied Sciences Research, 1(13):322–
151.
Hock, O. and Sedo, J. (2018). Inverse kinematics using
transposition method for robotic arm. In 2018 ELEK-
TRO, pages 1–5. IEEE.
Krasilnikyants, E. V., Varkov, A. A., and Tyutikov, V. V.
(2013). Robot manipulator control system. Automa-
tion & Remote Control, 74(9).
Kumar, S., Rani, K., and Banga, V. (2017). Robotic arm
movement optimization using soft computing. IAES
International Journal of Robotics and Automation
(IJRA), 6(1):1–14.
Lopez-Franco, C., Hernandez-Barragan, J., Alanis, A. Y.,
and Arana-Daniel, N. (2018). A soft computing
approach for inverse kinematics of robot manipula-
tors. Engineering Applications of Artificial Intelli-
gence, 74:104–120.
M
¨
uller, B., Reinhardt, J., and Strickland, M. T. (1995). Neu-
ral networks: an introduction. Springer Science &
Business Media.
Niloy, M. A., Shama, A., Chakrabortty, R. K., Ryan, M. J.,
Badal, F. R., Tasneem, Z., Ahamed, M. H., Moyeen,
S. I., Das, S. K., Ali, M. F., et al. (2021). Critical de-
sign and control issues of indoor autonomous mobile
robots: A review. IEEE Access, 9:35338–35370.
Raibert, M. (1978). Manipulator control using the config-
uration space method. Industrial Robot: An Interna-
tional Journal, 5(2):69–73.
Raja, R. and Nagasubramani, P. (2018). Impact of mod-
ern technology in education. Journal of Applied and
Advanced Research, 3(1):33–35.
Royakkers, L. and van Est, R. (2015). A literature review
on new robotics: automation from love to war. Inter-
national journal of social robotics, 7:549–570.
Xu, D., Acosta Calderon, C. A., Gan, J. Q., Hu, H., and
Tan, M. (2005). An analysis of the inverse kinemat-
ics for a 5-dof manipulator. International Journal of
Automation and Computing, 2(2):114–124.
Yardimci, A. (2007). A survey on use of soft computing
methods in medicine. In Artificial Neural Networks–
ICANN 2007: 17th International Conference, Porto,
Portugal, September 9-13, 2007, Proceedings, Part II
17, pages 69–79. Springer.
Using Soft Computing and Computer Vision to Create and Control an Integrated Autonomous Robotic Manipulator Process
827
