
Use of Custom Videogame Dataset and YOLO Model for Accurate
Handgun Detection in Real-Time Video Security Applications
Diego Bazan, Raul Casanova and Willy Ugarte
a
Universidad Peruana de Ciencias Aplicadas, Lima, Peru
Keywords:
Video Surveillance Systems, Criminal Activities, Human Limitations, Custom Pistol Video-Game Dataset,
YOLOV7, Real Time Detection, Artificial Vision, Machine Learning.
Abstract:
Research has shown the ineffectiveness of video surveillance operators in detecting crimes through security
cameras, which is a challenge due to their physical limitations. On the other hand, it was shown that com-
puter vision, although promising, faces difficulties in real-time crime detection due to the large amount of data
needed to build reliable models. This study presents three key innovations: a gun dataset extracted from the
Grand Theft Auto V game, a computer vision model trained on this data, and a video surveillance application
that employs the model for automatic gun crime detection. The main challenge was to collect images repre-
senting various scenarios and angles to reinforce the computer vision model. The video editor of the Grand
Theft Auto V game was used to obtain the necessary images. These images were used to train the model,
which was implemented in a desktop application. The results were very promising, as the model demonstrated
high accuracy in detecting gun crime in real time. The video surveillance application based on this model was
able to automatically identify and alert about criminal situations on security cameras.
1 INTRODUCTION
Video surveillance system operators often perform
proactive recognition of criminal situations that could
occur in multiple locations simultaneously during a
full workday. However, this approach leads to the
oversight of real danger situations, which occur spo-
radically. In a 2002 study
1
, Security Oz Magazine
found that after 12 minutes of continuous monitor-
ing, operators missed 45% of on-screen activity, and
after 22 minutes, they missed 95%. This study also
suggests that operators are expected to review a large
number of monitors, which causes their performance
in detecting incidents decrease as the number of mon-
itors increases.
On a social level, the safety of citizens and the
prevention of criminal acts is of utmost importance,
and the use of video surveillance systems is a key tool
in achieving this goal. Nevertheless, the human lim-
a
https://orcid.org/0000-0002-7510-618X
1
Wood, J. and Clarke, T. (2006) Practical guidelines
for CCTV ergonomics, In: R.N. Pikaar, E.A.P. Kon-
ingsveld and P.J.M. Settels (eds.) Proceedings of IEA 2006
Congress, International Ergonomics Association 16th Tri-
ennial Congress; 9 – 14 July. Maastricht, The Netherlands:
Elsevier, CD-ROM.
itations of the operators to detect criminal activities
make their surveillance work insufficient. Therefore,
there is an urgent need to develop technological so-
lutions that improve the performance of operators in
these systems. This is where computer vision and
machine learning techniques come into play, offer-
ing the possibility of partially automating the detec-
tion of criminal activity, thereby reducing the burden
on human operators and increasing the efficiency of
surveillance systems.
Addressing the challenge of real-time crime detec-
tion using computer vision techniques is not an easy
task due to several reasons. One of the main difficul-
ties is the high variability and complexity of the real-
world scenarios that need to be analyzed. This com-
plexity arises from various factors, such as changes in
illumination, occlusions, and variations in the appear-
ance of objects and people due to camera viewpoint,
posture, clothing, and accessories. Furthermore, the
dynamic and unpredictable nature of criminal events
requires fast and accurate detection and tracking of
targets across cameras, while minimizing false alarms
and processing time.
There are a couple solutions to this problem. For
example, the authors (Bhatti et al., 2021) use a model
that combines deep learning and object detection al-
520
Bazan, D., Casanova, R. and Ugarte, W.
Use of Custom Videogame Dataset and YOLO Model for Accurate Handgun Detection in Real-Time Video Security Applications.
DOI: 10.5220/0012716500003690
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 26th International Conference on Enterprise Information Systems (ICEIS 2024) - Volume 1, pages 520-529
ISBN: 978-989-758-692-7; ISSN: 2184-4992
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

gorithms for weapons detection. They achieved high
accuracy in detecting firearms in real-world scenar-
ios and can trigger alarms to alert security personnel
in real-time, but they used a custom dataset of real
scenarios unlike our approach in which we use a cus-
tom dataset from the Grand Theft Auto V video game
in order to increase the robustness of our model by
training many more detection angles and scenarios. In
the other hand, (Ashraf et al., 2022) proposes a solu-
tion with CNN and YOLO-V5s, providing high accu-
racy and robustness to varying conditions. However,
doesn’t implement the model in a desktop application
for video surveillance like our approach to alert when
detection occurs.
This paper presents an innovative approach to
crime detection through real-time identification of
pistols and revolvers using a YoloV7 object detection
model trained with a customized dataset based on im-
ages from the popular video game Grand Theft Auto
V (GTAV). For this purpose, a set of images covering
a wide variety of situations and scenarios has been
carefully selected, and a manual labeling process has
been carried out to obtain an accurate and detailed an-
notation of the weapons.
In addition, a desktop application has been devel-
oped that uses the detection model to alert the user
to the presence of pistols and revolvers in real time,
allowing for an immediate and effective response to
potential dangerous situations. However, it is impor-
tant to note the limitations of our approach.
First, real-time detection requires a powerful
GPU, which may be an impediment to its implemen-
tation in some systems.
Second, detection will be performed from a sin-
gle camera, which limits the monitoring capability in
environments with multiple access points.
Third, it is worth mentioning that our model will
only detect pistols and revolvers, so other weapons
will not be identified.
Finally, the desktop application will only alert se-
curity operators using it, which could limit its effec-
tiveness in emergency situations where other entities
must also be notified. These limitations are important
and should be considered when evaluating the feasi-
bility and effectiveness of the proposed approach.
Our main contributions are:
• We have built a custom dataset from the game
Grand Theft Auto V (GTAV) with images of guns
and revolvers held at different angles and environ-
ments.
• We have trained a computer vision model based
on YOLOV7 capable of reliably detecting guns
and revolvers from security camera videos with
high accuracy.
• We have developed a desktop application capable
of reporting, visually and audibly, about the de-
tections made by the model to partially automate
the crime detection process by operators.
This paper is divided into the following sections:
First, we will analyze works related to armed crime
detection through computer vision in Section 2. Then,
we will discuss the relevant concept and describe our
contribution in more detail in Section 3. In addition,
we will explain the procedure and experiments per-
formed in this work in Section 4. Finally, we will dis-
cuss the conclusions of our project and indicate rec-
ommendations for future work in Section 5.
2 RELATED WORKS
The field of computer vision has been studied for sev-
eral years in an attempt to discover new techniques
that enable computers to understand images by cate-
gorizing the objects within them. This variety of tech-
niques has been developed to achieve accurate results
in less time and with minimal use of computational
resources. In this section, we will mention related
works where similar techniques to our proposal are
used.
In (Nakkach et al., 2022), the authors propose
an abnormal behavior detector based on deep learn-
ing through the use of convolutional neural networks
(CNN) to alert these behaviors. They use convolu-
tional layers to reduce the size of incoming images
and, thus, reduce the use of computational resources.
Similarly, they propose an architecture for an smart
surveillance system which is responsible for alerting
an operator as well as receiving feedback from the op-
erator to update the model. Instead, we use YOLO in
its version 7 to achieve high-confidence and fast de-
tection of handguns in use, in order to alert about a
possible crime where pistols or revolvers are being
used through a video surveillance system only when
these types of weapons are used.
In (Bhatti et al., 2021), the authors propose a real-
time firearm detection system based on the YOLO
object detection model version 4. They tested differ-
ent computer vision models, such as SSD-MobileNet-
v1, YOLOv3, FasterRCNNInceptionResNetv2, and
YOLOv4, on three different data sets. After these
tests, the dataset containing real-world situations was
used to train the YOLOv4 model, as it demonstrated
better results. Instead, our work focuses on utilizing
the latest version of YOLO to exploit its efficiency in
computational resource consumption while maintain-
ing the speed and reliability of detections. Addition-
ally, we train this model with a custom dataset from
Use of Custom Videogame Dataset and YOLO Model for Accurate Handgun Detection in Real-Time Video Security Applications
521
the Grand Theft Auto V video game created by us
to facilitate the collection of gun and revolver images
from larger angles and environments.
In (Sung and Park, 2021), the authors built an
intelligent surveillance system that allows for active
monitoring of security cameras without the need for
an operator in charge. They developed this system
based on a deep learning model called Fast R-CNN,
which has the ability to conduct fast training and test-
ing with good final detections. Instead, our automatic
video surveillance detection system uses YOLO as
its object detection model, which, unlike traditional
region-based models such as Fast R-CNN, examines
the entire image and creates bounding boxes with
their corresponding probabilities, resulting in a much
faster detection model with the same or better accu-
racy.
In (Ashraf et al., 2022), the authors developed a
firearm detection model using YOLO-V5 and CNN
algorithms. The model was trained on a dataset con-
sisting of images with and without guns, and its ef-
ficacy was evaluated using various metrics such as
precision, recall, and F1 score. The model achieved
promising results in firearm detection for both images
and videos, but it was not tested in a real-time envi-
ronment, which may have had an impact on how well
it worked in actual surveillance scenarios. In contrast
to this approach, our system provides an intuitive user
interface that enables operators to view detections and
receive audiovisual notifications in real-time.
In (Olmos et al., 2018), the authors built an au-
tomatic gun detection system in videos based on a
Convolutional Neural Network (CNN) model and two
detection approaches: the sliding window and the re-
gion proposal approach. Various datasets have been
used to train the model, and its performance was as-
sessed using a newly created metric called Alarm Ac-
tivation per Interval (AApI). With this method, videos
with guns may be quickly and effectively identified
and alerted. However, there may be issues with false
positives (Due to the different environmental condi-
tions commonly seen in security cameras, in which
the datasets images were taken), and its reaction time
is insufficient for real-time applications. Our solution
could address these issues by reducing the number of
false positives as the model has been trained with im-
ages of guns from angles commonly seen in security
cameras, and by providing adequate performance for
a real-time environment with the YoloV7 model.
3 CONTRIBUTION
3.1 Preliminary Concepts
In this section, the main concepts used in our work are
presented. We aim to use deep learning methods, spe-
cific to the field of computer vision, in order to pro-
pose an application capable of alerting through object
detection (handguns) to automate video surveillance.
Neural Networks (Khemani et al., 2024): It con-
sists of a layer of input neurons, one or two layers
of hidden neurons and a final layer of output neurons
through which information travels to produce result-
ing values. It is inspired by the sophisticated function-
ality of the human brain where hundreds of millions
of interconnected neurons process information in par-
allel. Such networks help computers make intelligent
decisions without the need for constant human assis-
tance. This is because, after some training, they can
learn to find relationships between input and output
data that are much more complex than linear compu-
tations.
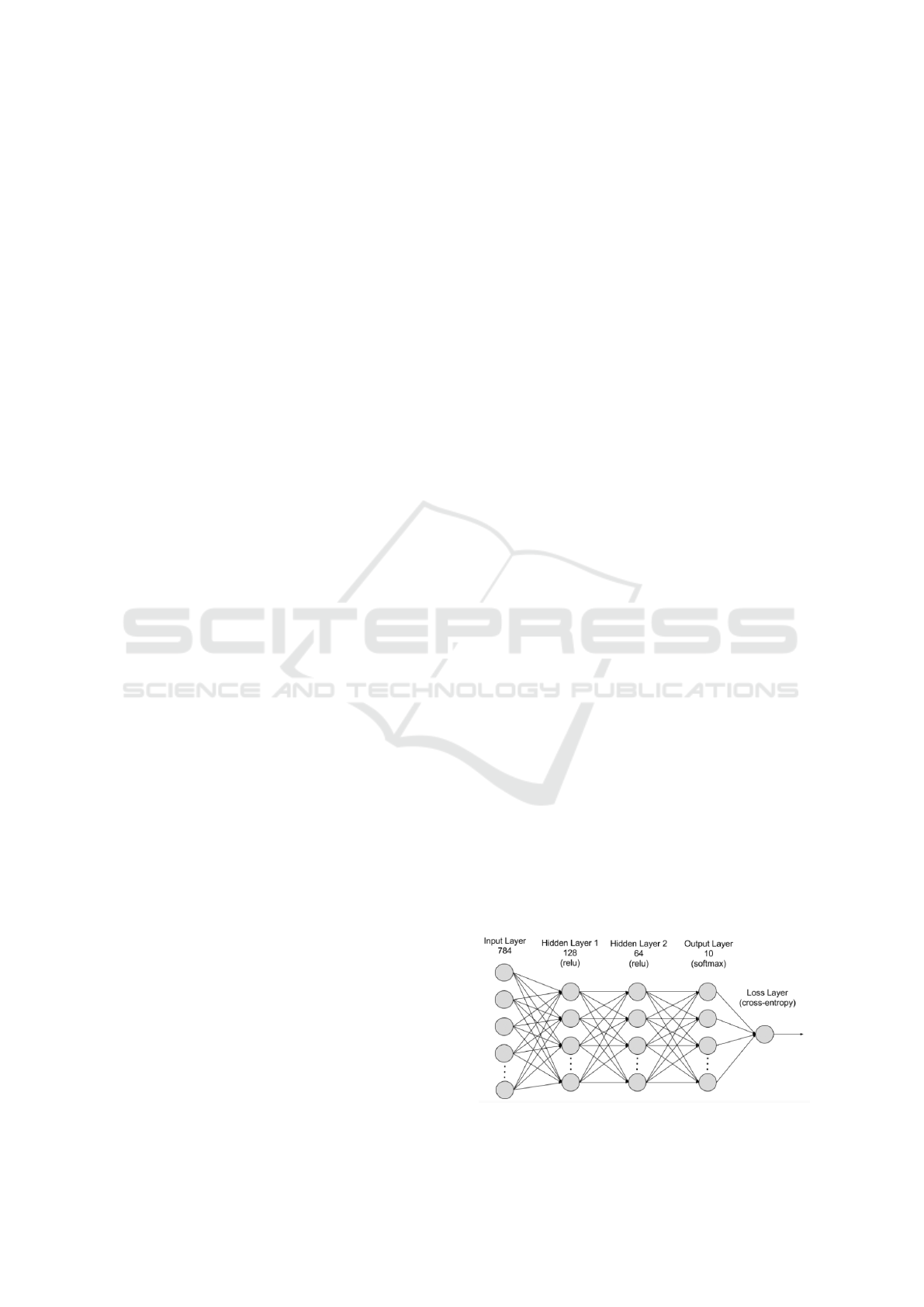
In Figure 1, there is an illustration of a deep neu-
ral network, which includes an input layer and an
output layer, with multiple hidden layers in between.
The strength of the connections between neurons is
represented by weight values, and nodes with higher
weights have a greater impact on the overall function-
ing of the network.
Definition 1 (Convolutional Neural Networks (CNN)
(Zhou et al., 2024)). They were born in response to
the problem that conventional neural networks had
when they were used for the recognition of very large
images, due to the need to use more and more input
data proportional to the pixels of the image.
This type of networks, also known as CNNs,
solved this problem by adding to their architecture
layers known as Convolutional Layers, in which fil-
ters of small dimensions are used to move along the
image, in order to extract important features and re-
duce its size. These features will be used to train a
conventional neural network to obtain the expected
Figure 1: Deep Neural Network (Khemani et al., 2024).
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
522
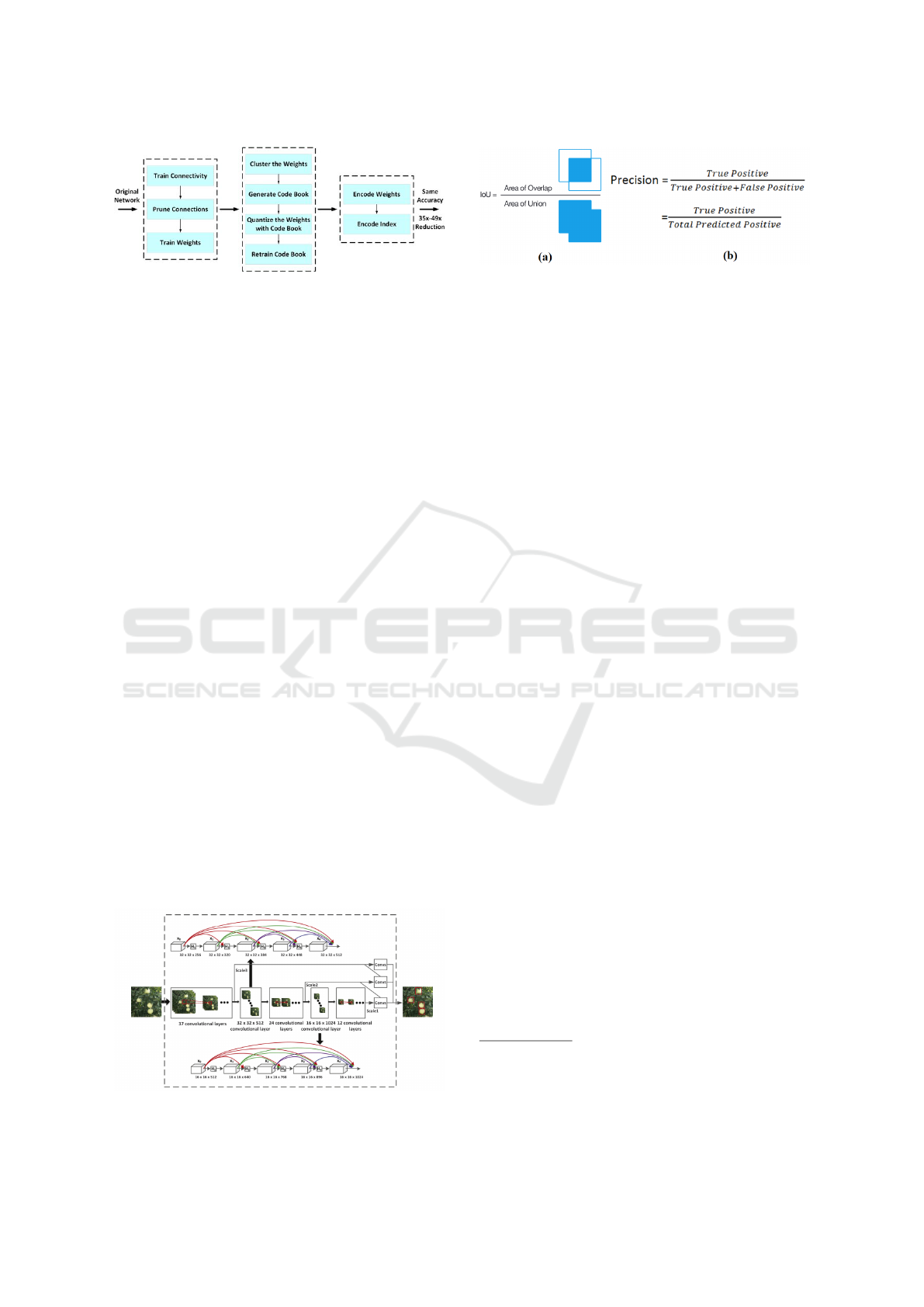
Figure 2: Deep Neural Network (Zhou et al., 2024).
classification results.
We can see an example of a Convolutional Net-
work Arquitecture in Figure 2.
You Only Look Once (Tian et al., 2019): The al-
gorithm called YOLO is an algorithm based on Con-
volutional Neural Networks, totally oriented to the de-
tection of objects in real time. This is because it has a
low computational cost. This algorithm follows a pro-
cess to perform the detection, first, a matrix of cells
is created on the image, to capture objects that exist
within them. From the objects that have been detected
in the cells, predictions are made to know the size of
the object within the image, in order to achieve a com-
plete framing in a bounding box. In Figure 3 we can
see the YOLOv3 architecture.
Mean average precision metric (mAP) (b13,
2009): This metric is commonly used to measure ac-
curacy in object detection within the field of computer
vision. The process begins with object predictions
based on bounding boxes and class labels. For each
box, an overlap between the predicted box and the
ground truth box is measured using the intersection-
over-union (IoU) metric, which is calculated using the
formula shown in Figure 4 (a) For each detection task,
precision is calculated using the IoU value above a
given threshold.
For example, if the threshold is set to 0.5 and the
predicted value is 0.7, it will be classified as a True
Positive (TP). Otherwise, if it is less than 0.5, it will
be classified as a False Positive (FP). The calculation
of this precision can be seen in Figure 4 (b). From this
point on, with the TP and FP values, the model’s pre-
cision can be calculated for each class, and the mAP
Figure 3: Deep Neural Network (Tian et al., 2019).
Figure 4: IOU and Precision formulas (b13, 2009).
is the average of all these precisions, which gives an
idea of how accurate each model is for object detec-
tion in images.
3.2 Method
In this section, the main contributions proposed in this
project will be detailed.
3.2.1 Dataset
To choose the dataset with which the model would be
trained, a prior review of existing datasets was nec-
essary. The initial dataset, named ”Pistol dataset”,
was sourced from the University of Granada
2
, chosen
for its notable collection of 2,986 images and 3,448
firearm labels. However, upon preliminary review, it
was evident that certain images did not depict firearms
used in contemporary contexts like the one we can see
in Figure 5 (b), including cartoons, as we can see in
Figure 5 (a), that were incongruent with the intended
purposes of the study. Consequently, an initial version
of the dataset was curated for model training.
Following the first training iteration, a decision
was made to further refine the dataset by excluding
images that deviated from typical camera angles ob-
served in security footage as we can see in Figure 5
(c). Additionally, all standalone firearm images (with-
out being held by a person), like in Figure 5 (d),
were removed, as the presence of a grip is essential
for criminal activities. This dataset refinement ne-
cessitated re-labeling, ensuring that the firearm im-
ages included a visible portion of the hand holding
the weapon. Subsequently, the model was retrained
using this updated dataset.
Upon analyzing the results, it was observed that
the model struggled to accurately detect firearms in
certain scenarios with varying perspectives and light-
ing conditions, yielding numerous false positives. To
address these limitations, a new dataset had to be cre-
ated to encompass a broader range of scenarios, in-
2
F. Herrera Triguero, S. Tabi, A. Castillo
Lamas, F. P
´
erez Hern
´
andez, and R. Olmos Pimentel,
Weapons detection for security and video surveillance,
https://sci2s.ugr.es/weapons-detection (accessed Jun. 24,
2023).
Use of Custom Videogame Dataset and YOLO Model for Accurate Handgun Detection in Real-Time Video Security Applications
523
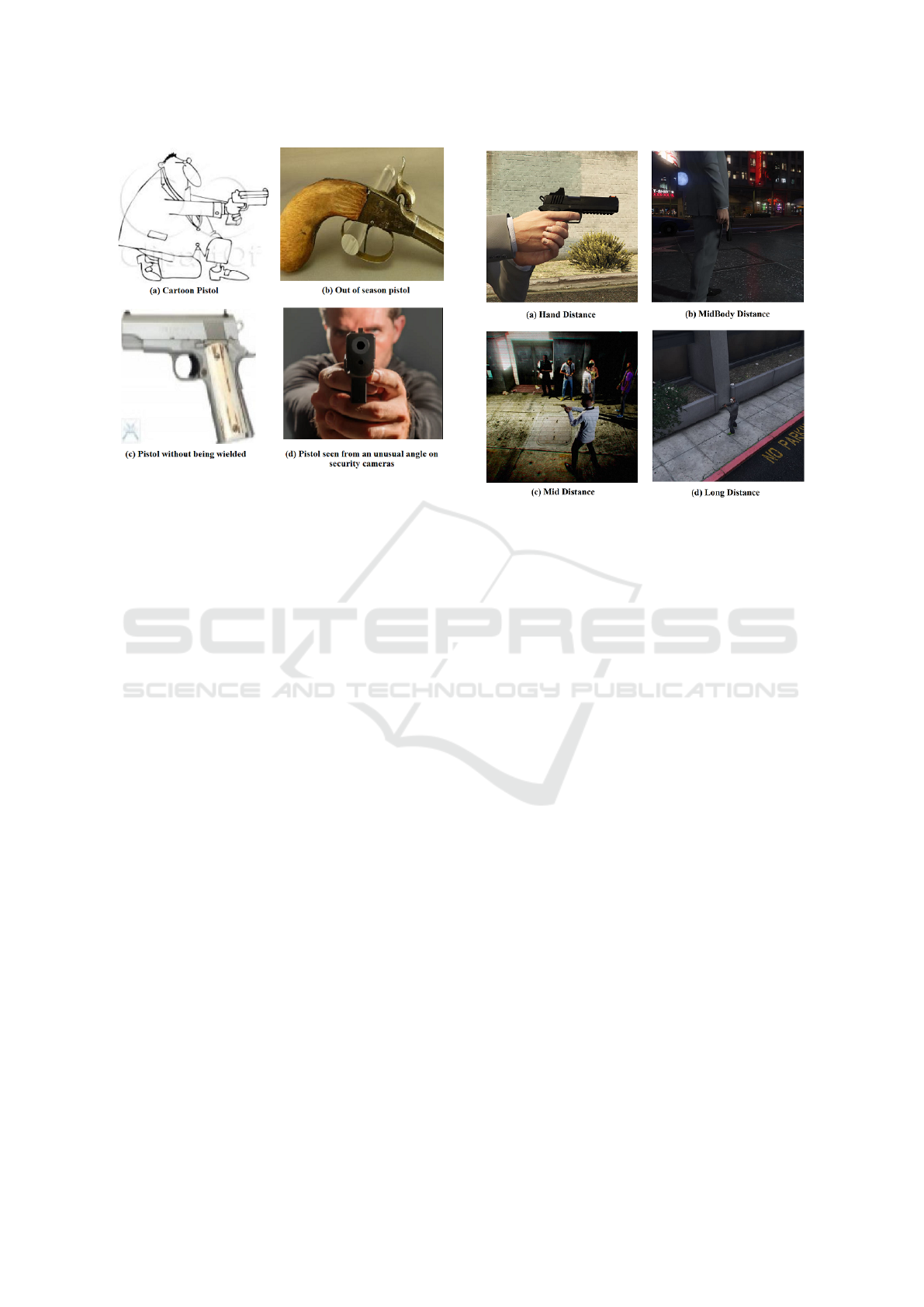
Figure 5: ”Pistol dataset” images.
cluding diverse perspectives, firearm types, and light-
ing conditions. Given the limited availability of real-
world photographic environments, a creative and un-
conventional approach was adopted.
The video game Grand Theft Auto V (GTA V)
was chosen as the foundation for constructing this
new dataset. Due to its realistic graphics, provided
unparalleled freedom to replicate firearm actions and
movements, capturing them from different camera an-
gles. In the other hand, the in-game editor proved to
be an invaluable tool, simplifying a significant portion
of the dataset creation process.
The new dataset comprised four image categories,
categorized according to the distance between the
firearm and the camera, ranging from closest to fur-
thest. Furthermore, factors such as daytime and night-
time lighting conditions, simulated security camera
filters adding noise to the images, and a variety of pis-
tols and revolvers were taken into consideration (all
this variety of categories and images can be seen in
Figure 6). After collecting the necessary images from
the video game, a standardized aspect ratio of 1:1 was
applied to ensure compatibility with model training
requirements. Subsequently, all 2,300 images were
meticulously labeled, resulting in an equal number of
corresponding firearm labels.
To further enhance the dataset’s diversity, a data
augmentation technique employing horizontal mirror-
ing was applied to all images. This approach intro-
duced new perspectives and helped mitigate the risk
of model overfitting. Finally, the updated dataset was
utilized to retrain the firearm detection model, yield-
ing the final version of the model.
Figure 6: ”GTA V Dataset” Categories.
3.2.2 Fine-Tunning Model
To create the detection model, the Fine-Tuning tech-
nique was used by taking the weights obtained from
the pre-trained YOLOv7 model. This model was cho-
sen due to its high performance in similar scenarios
where real-time response is required.
In the training process, most of the hyperparame-
ters remained the same as those used in pre-training
with the MS COCO dataset. However, some values
were changed, such as the training batch size, set to
32, and the number of training epochs. This last value
varied for the 3 training sessions as they were halted
when a loss trend was observed in certain metrics.
3.2.3 Desktop Application
Our latest contribution is the desktop application that
will obtain images from a video surveillance camera
and process it to identify if a pistol or revolver was
detected, in order to alert the operator. In the Figure
7, we will detail the process of how the application
receives an image to detect if a crime is occurring with
a gun in hand.
• First, the application is able to receive an image
from a video source of the user’s choice, because
it is able to recognize all video devices connected
to the computer.
• Second, the application will take care of process-
ing the received image in order to adapt it to
the input parameters (640x640 px) that the cus-
tomized model is able to receive.
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
524
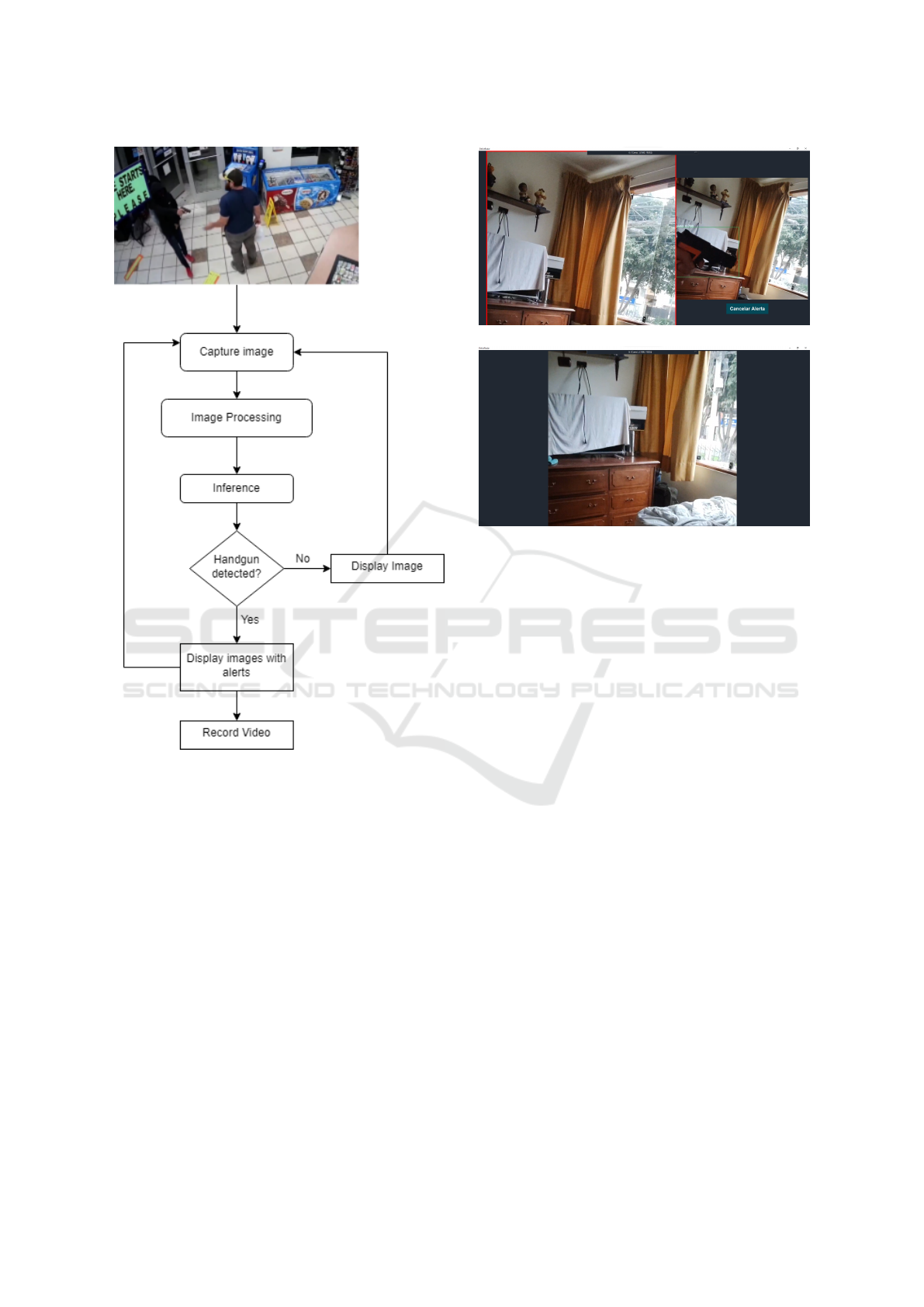
Figure 7: Application flow diagram.
• Third, the application is responsible for sending
the processed image to the model to perform the
corresponding inference and, in this way, deter-
mine the location of possible weapon detections.
• Fourth, when the results are obtained, the appli-
cation will validate if it is necessary to alert the
operator. This it decides based on the detection of
a weapon or not.
• In case it has found a weapon, as can be seen
in Figure 8a, it displays the real-time image it
receives from the camera along with the freeze
frame of the first weapon detection with an alert
sound, which can be muted at any time. In addi-
tion, it records a video of about 10 seconds and,
once that time has elapsed, the recording is saved
in mp4 format and the freeze frame is no longer
displayed.
• On the other hand, if the application did not detect
(a) Gun detection.
(b) Nothing detected.
Figure 8: Comparison of detection of a gun.
anything, it only shows the image in real time and
repeats the flow, as shown in Figure 8b.
This is how the application can alert the opera-
tor and give him the facilities to detect crimes with
weapons, in addition to recording these events so that
the videos can serve as evidence of what happened.
4 EXPERIMENTS
This section explores the experiments conducted us-
ing the YOLO model trained with various datasets to
identify pistols and revolvers. Additionally, it exam-
ines the tests performed with the desktop application
for real-time detections, focusing on the utilization of
a toy gun as the subject of study.
4.1 Experimental Protocol
This subsection provides an overview of the experi-
mental environment’s configuration, including the lo-
cal hardware setup and the applications employed
during the experiments. The following information
outlines the specific details concerning the hardware
configuration and software applications used in the
experimental setup.
The model experiments have been executed on
a computer with an AMD Ryzen 5600X CPU, an
NVIDIA RTX 3060 12gb GPU and 16gb of RAM at
Use of Custom Videogame Dataset and YOLO Model for Accurate Handgun Detection in Real-Time Video Security Applications
525

Table 1: Inference and frame processing times in seconds
according to the computational resource used.
Resource
Inference
(seconds)
Frame
(seconds)
RTX 2070 super .03 .05
RTX 3060 .03 .06
GTX 1050 .09 .11
CPU .30 .40
3600Mhz. The model used for transfer learning is the
latest version of the pretrained YOLOv7 model. In
addition, to perform the desktop application experi-
ments we also use a desktop computer with an AMD
Ryzen 5600X CPU, an NVIDIA RTX 2070 Super 8gb
GPU and 16gb of RAM at 3600Mhz, and a laptop
with an Intel Core I5 7200U CPU, an NVIDIA GTX
1050 4gb GPU and 8gb of RAM at 2400Mhz.
As for the desktop application, it has been devel-
oped in Python 3.10, and the same version is required
for deployment. In addition, the experiments were
performed consuming 3 different computational re-
sources, as shown in Table 1, and the performance
of each of them was measured through computational
time in seconds for both inference, as well as for the
entire processing of a single frame.
The source code can be accessed through this link:
https://github.com/DelictRadar/DesktopApp
4.2 Results
In this subsection, the experiments conducted and the
results obtained for both the detection model and the
desktop application in general will be detailed.
4.2.1 Model Validation with Metrics
It is necessary to evaluate the performance of the clas-
sification model to validate its accuracy and perfor-
mance in detecting weapons in different scenarios. To
complete this task, two different metrics were used,
which are listed below:
• Mean Average Precision (mAP): This metric is a
measure used to evaluate the performance of clas-
sification models used in detection problems with
multiple classes or categories. There are 2 vari-
ants for calculating mAP.
– Firstly, there is mAP 0.5, which uses a detec-
tion threshold of 0.5. This means that only de-
tections with a confidence score or probability
of belonging to a class equal to or greater than
0.5 are considered correct. Any detection be-
low that threshold is considered incorrect.
– Secondly, mAP 0.5-0.95 is calculated using a
range of detection thresholds ranging from 0.5
to 0.95, with increments of 0.05. This implies
that the performance of the model is evaluated
considering a wider range of confidence thresh-
olds.
For our comparisons, we will use this latter vari-
ant as it provides a more comprehensive mea-
sure. Figure 9 shows 3 trainings with different
datasets, number of epochs, and the evolution of
mAP throughout them. The model with the high-
est mAP value is considered the best.
• Function Loss: It is a measure that quantifies the
discrepancy between the predictions made by a
model and the actual values of the training data. If
the model is suffering from overfitting, it is likely
that the loss function value on the training data
will continue to decrease significantly, while the
loss function on the validation data starts to in-
crease or plateau at a higher level. In our context,
one of the main goals is to minimize this metric
during training so that the model can make accu-
rate predictions on new data. We use 2 variants
of this metric to make it easier to recognize erro-
neous behavior in the model.
– Function Object Loss: This variation is related
to the model’s ability to correctly detect the
presence of objects in an image. If the model
has overfitting, it may be learning patterns and
specific details from the training data that are
not representative of the general population.
Figure 11 shows this variation evolution.
– Function Box Loss: This variation is related
to the accuracy in predicting the coordinates
of the bounding boxes around the detected ob-
jects. In an overfitting scenario, the model may
memorize the exact details of the locations and
sizes of the bounding boxes in the training data,
which can result in lower accuracy in localiz-
ing the bounding boxes in the validation data.
Figure 10 shows the metric variation evolution
trough epochs.
4.2.2 Desktop Application Validation with
Metrics
• Execution time: It is the time taken by the pro-
cessor to solve the instructions of a program.
This metric is calculated by subtracting the time
obtained before and after executing the process
steps. In the particular case of this work, this met-
ric was used to validate the integration between
the model and the desktop application in terms of
its ability to produce real-time detections.
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
526
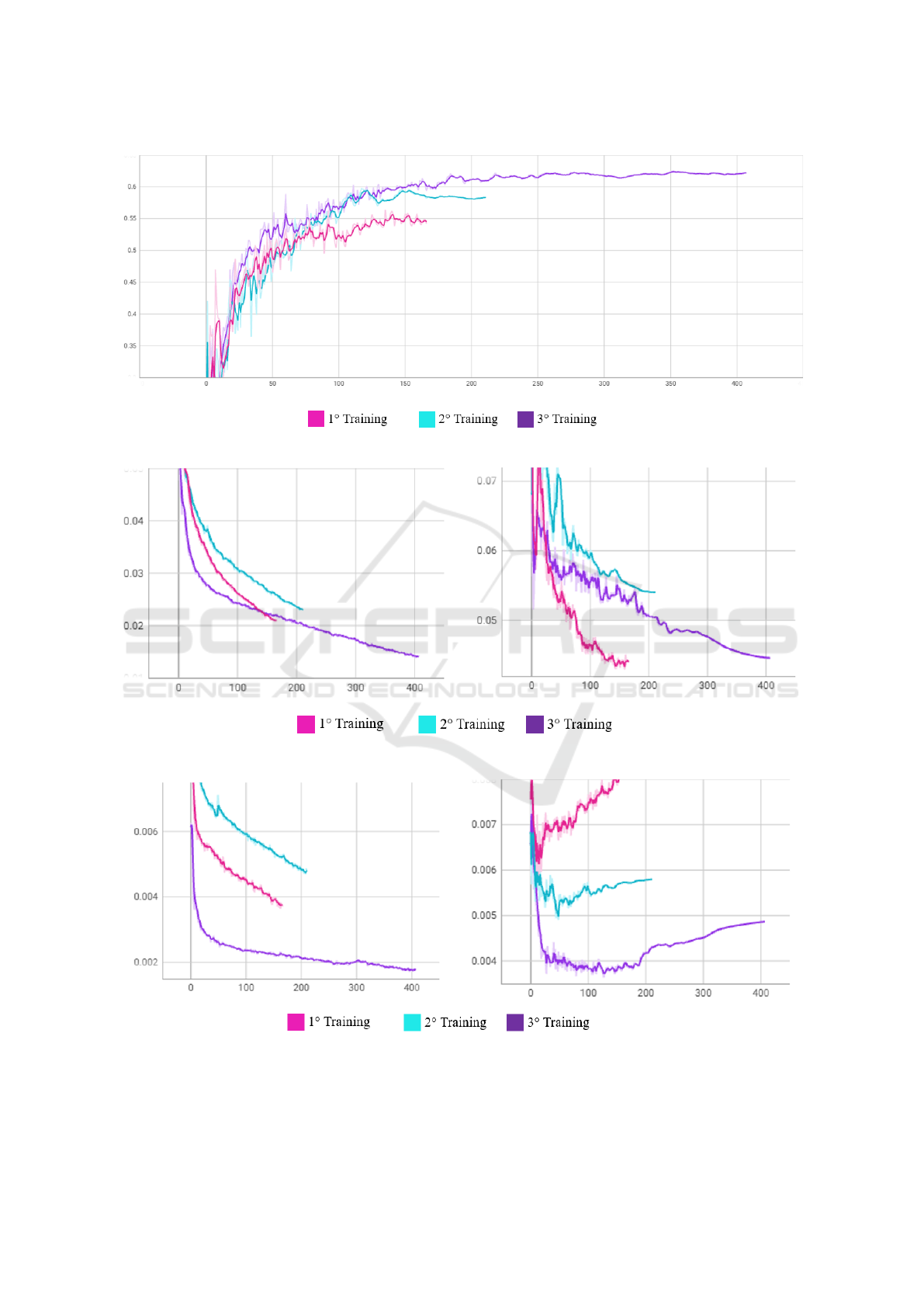
Figure 9: maP metric through epochs in 3 different trainings.
Figure 10: Function Box Loss Training vs Validation.
Figure 11: Function Object Loss Training vs Validation.
– To this end, firstly, the model execution time to
perform inference was obtained, which in other
words would be expressed as the time it takes
for the model to detect the weapons in each im-
Use of Custom Videogame Dataset and YOLO Model for Accurate Handgun Detection in Real-Time Video Security Applications
527

age provided to it.
– Secondly, the execution time of a frame was
calculated, that is, the time the application takes
from the moment it receives an image from the
security camera until it displays it on the screen.
Both times are very important, especially the first
one because it tells us how long it takes to execute
the heaviest processing of the whole application.
4.3 Discussion
In this subsection, the results obtained in the previous
section are detailed and discussed.
4.3.1 Model Validation with Metrics
As mentioned earlier, three trainings were conducted,
and three different metrics were collected for each
one. The best model should excel in each of these
metrics.
First, we evaluated the mAP metric, which is the
most critical in terms of accuracy. According to the
visualization in Figure 1, the first training achieved
an mAP of 0.563 at epoch 140, the second training
achieved a value of 0.597 at epoch 153, and finally,
the third training achieved 0.625 at epoch 211. Based
on these figures, it can be deduced that for this metric,
the best model is the result of the third training.
Now, we evaluate the Function Loss metric for its
Box variation. It can be observed in Figure 10 that
all three models show a consistent downward trend in
both validation and training losses. This indicates that
all three trainings have a good fit, so there is no clear
winner, at least in this variation of the metric. Next,
we evaluate the Function Loss metric in the Object
variation. Figure 11 shows that for the first two train-
ings, there is a decreasing trend in the training data,
but the opposite is observed in the validation data.
This indicates that both models are not fitting well and
are suffering from overfitting. On the other hand, the
third training maintains a stable decreasing trend in
both cases and shows a slight increase starting from
epoch 180. Based on the results of the Function Loss
metric, it can be concluded that the best model was
the result of the third training. However, it is ideal to
use the training from an epoch close to 200, as over-
fitting behavior started to emerge after this stage.
Regarding the detection model, it can be con-
cluded that the third training yielded the best results,
which is why it was chosen to be used in conjunction
with the desktop application. However, there is still
room for improvement in this model, as there are still
false positives, but the accuracy of the detections is
Figure 12: Testing with the best model.
sufficient to be a reliable model. The Figure 12 de-
picts the aforementioned testing.
4.3.2 Desktop Application Validation with
Metrics
Finally, the model inference execution time and the
processing time for each frame turned out to be dif-
ferent depending on the type of processing unit used,
as shown in Table 1. For the computer using CPU,
a time of 0.3 seconds for inference and 0.4 seconds
for processing one frame was obtained. On the other
hand, for the GTX 1050 GPU, an execution time of
0.09 seconds for inference and 0.11 seconds for frame
processing was achieved. Also, for the RTX 3060
GPU, an execution time of 0.03 seconds for inference
and 0.06 seconds for frame processing was obtained.
Finally, for the RTX 2070 Super GPU, an execution
time of 0.02 seconds for inference and 0.06 seconds
for frame processing was obtained. In conclusion, as
the computing power of the processing unit increases,
the application will display images with less delay,
so we recommend using higher power graphics cards
than the GTX 1050 GPU tested.
5 CONCLUSION
First and foremost, with the use of real-time detection
models like YOLOV7, we have been able to confirm
in this research that semi-automation of monitoring is
feasible. As demonstrated in the studies, a specialized
graphics card is required for the intended performance
ICEIS 2024 - 26th International Conference on Enterprise Information Systems
528

of the model and application, though a high-end card
will guarantee superior performance.
On the other hand, we discovered that the ac-
curacy of the model is more dependent on the vol-
ume and quality of the data with which it is trained.
Thanks to the comparisons between the first dataset
found and the dataset constructed from images of a
video game, it can be concluded that video games can
become a great repository of images that can be used
to solve a real-world context problem using detection
and classification models. Although the findings were
great it is important to note that there are a significant
number of false positives. This could be because the
model is confused by certain images or there are still
unexplored angles of view during the training.
These results allow for the identification of im-
provements that could be made to the project. Firstly,
although the model has shown good performance with
a single camera input, no tests were conducted with
more than one, so its operation would not be opti-
mal in a large security system. As a result, the next
step would be to test the model with multiple inputs.
To achieve this, it would be recommended to retrain
YOLOV7 models or its most recent version YOLOV8
in their ”tiny” variants, which are used to run mod-
els on low-resource computers (Cornejo et al., 2021;
Lozano-Mej
´
ıa et al., 2020). Second, the trials’ dis-
covery of false positives shows that the model can be
significantly strengthened by being trained on a big-
ger amount of data (Rodriguez-Meza et al., 2021).
Given that GTA V was launched ten years ago, it is
advised to try using more contemporary video games,
which offer a comparable selection of weapons and
settings and greater graphic quality to further approxi-
mate reality, in order to continue practicing with video
game graphics. Finally, a good continuation of this
project would be to track the movement of the de-
tected armed criminals by leveraging the identifica-
tion of distinctive features.
REFERENCES
(2009). Mean average precision. In Encyclopedia of
Database Systems, page 1703. Springer US.
Ashraf, H., Imran, M., Qahtani, A., Alsufyani, A., Almu-
tiry, O., Mahmood, A., Khan, M., and Habib, M.
(2022). Weapons detection for security and video
surveillance using cnn and yolo-v5s. Computers, Ma-
terials and Continua, 70:2761–2775.
Bhatti, M. T., Khan, M. G., Aslam, M., and Fiaz, M. J.
(2021). Weapon detection in real-time CCTV videos
using deep learning. IEEE Access, 9:34366–34382.
Cornejo, L., Urbano, R., and Ugarte, W. (2021). Mobile
application for controlling a healthy diet in peru using
image recognition. In FRUCT, pages 32–41. IEEE.
Khemani, B., Patil, S., Kotecha, K., and Tanwar, S. (2024).
A review of graph neural networks: concepts, ar-
chitectures, techniques, challenges, datasets, applica-
tions, and future directions. J. Big Data, 11(1):18.
Lozano-Mej
´
ıa, D., Vega-Uribe, E., and Ugarte, W. (2020).
Content-based image classification for sheet music
books recognition. In EirCon, pages 1–4. IEEE.
Nakkach, C., Zrelli, A., and Ezzedine, T. (2022). Smart bor-
der surveillance system based on deep learning meth-
ods. In ISNCC, pages 1–6. IEEE.
Olmos, R., Tabik, S., and Herrera, F. (2018). Automatic
handgun detection alarm in videos using deep learn-
ing. Neurocomputing, 275:66–72.
Rodriguez-Meza, B., Vargas-Lopez-Lavalle, R., and
Ugarte, W. (2021). Recurrent neural networks for de-
ception detection in videos. In ICAT, pages 397–411.
Springer.
Sung, C. and Park, J. (2021). Design of an intelligent
video surveillance system for crime prevention: ap-
plying deep learning technology. Multim. Tools Appl.,
80(26):34297–34309.
Tian, Y., Yang, G., Wang, Z., Wang, H., Li, E., and Liang, Z.
(2019). Apple detection during different growth stages
in orchards using the improved YOLO-V3 model.
Comput. Electron. Agric., 157:417–426.
Zhou, Y., Xia, L., Zhao, J., Yao, R., and Liu, B. (2024).
Efficient convolutional neural networks and network
compression methods for object detection: a survey.
Multim. Tools Appl., 83(4):10167–10209.
Use of Custom Videogame Dataset and YOLO Model for Accurate Handgun Detection in Real-Time Video Security Applications
529
