
A Scalable Synthetic Data Creation Pipeline for AI-Based Automated
Optical Quality Control
Christian Schorr
1,2
, Sebastian Hocke
1
, Tobias Masiak
3
and Patrick Trampert
3
1
German Research Centre Artificial Intelligence, Saarland Informatics Campus D 3 2, 66123 Saarbrücken, Germany
2
University of Applied Sciences Kaiserslautern, Amerikastraße 1, 66482 Zweibrücken, Germany
3
Artificial Intelligence Lab, ZF Friedrichshafen AG, Scheer Tower II, Uni-Campus Nord, D5 2,
66123 Saarbrücken, Germany
Keywords: Synthetic Data, Digital Reality, Digital Twin, Defect Detection, Deep Learning, Quality Control, Computer
Vision, Visual Inspection, Simulation, Rendering.
Abstract: In recent years, the industry's interest in improving its production efficiency with AI algorithms has grown
rapidly. Especially advancement in computer vision seem promising for visual quality inspection. However.
the proper classification or detection of defects in manufactured parts based on images or recordings requires
large amounts of annotated data, ideally containing every possible occurring defect of the manufactured part.
Since some defects only appear rarely in production, sufficient data collection takes a lot of time and may
lead to a waste of resources. In this work we introduce a configurable, reusable, and scalable 3D rendering
pipeline based on a digital reality concept for generating highly realistic annotated image data. We combine
various modelling concepts and rendering techniques and evaluate their use and practicability for industrial
purposes by customizing our pipeline for a real-world industrial use case. The generated synthetic data is used
in different combinations with real images to train a deep learning model for defect prediction. The results
show that using synthetic data is a promising approach for AI-based automated quality control.
1 INTRODUCTION
Recent advancements in visual computing have
revolutionized how deep learning algorithms can be
used for industrial purposes. Especially automating
tasks like quality control can drastically improve the
efficacy and speed of production (J. Li et al., 2018; S.
Li & Wang, 2022; Wang et al., 2021). However,
introducing these kinds of models into active
production environments comes with its own set of
challenges.
One of the biggest issues of deep learning for
quality inspection in industrial environments is the
availability of annotated training data. There are
many different types of defects that can occur on
machine manufactured parts that need to be classified
to ensure proper quality of the produced good. While
some of these defects will occur more regularly in the
production environment, there are many others that
will only appear on rare occasions. It is almost
impossible to gather sufficient training data for every
possible defect shape, without spending a
considerable amount of time collecting and
annotating or wasting resources by recreating known
malformations on actual production parts.
Another aspect is the extensive annotation
process that is necessary to generate training datasets
containing similar amounts of data for each defect to
ensure class balance. Overall: the creation of a good
training dataset, which produces satisfactory results
when used for training deep learning algorithms, is a
costly and time-consuming undertaking.
A promising approach to eliminate these
obstacles is the generation of synthetic image data
using a digital reality concept (Dahmen et al., 2019).
Some common methods for the creation of synthetic
image data include generative adversarial networks
(Goodfellow et al., 2014) or using 3D models and
rendering techniques. Rendered annotated synthetic
images of production parts have already been used to
improve the performance of an algorithm for the
semantic segmentation of defects on a gear fork
(Gutierrez et al., 2021).
In this paper we will further elaborate on the
process of generating 3D rendered image data and
develop a generalizable and scalable pipeline to
Schorr, C., Hocke, S., Masiak, T. and Trampert, P.
A Scalable Synthetic Data Creation Pipeline for AI-Based Automated Optical Quality Control.
DOI: 10.5220/0012717400003758
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2024), pages 37-46
ISBN: 978-989-758-708-5; ISSN: 2184-2841
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
37

simplify the process. This will be demonstrated by
using the specific use case of a diaphragm spring
provided by the automotive supplier ZF
Friedrichshafen AG.
2 STATE OF THE ART
The automatization of quality inspection tasks during
the manufacturing process is typically done by
analysing images of the product using computer
vision and deep learning algorithms (Bhatt et al.,
2021). Common techniques include classification or
localisation of defects on images from the production
environment. This can be achieved, among other
methods, by training Convolutional Neural Networks
for object detection like YOLO (Redmon et al., 2016)
or R-CNN (Ren et al., 2017) but also segmentation
approaches such as U-NET (Ronneberger et al., 2015)
or Mask-R-CNN (He et al., 2020). However, deep
learning algorithms also face some major problems,
such as lack of sufficient and diverse data and
adaption to new and unseen environments, affecting
the generalization performance of the model
(Mazzetto et al., 2020). Due to the low probability of
occurrence for some anomalies, generating a
balanced dataset containing vast amounts of image
data for each defect is nearly impossible (Jain et al.,
2022).
To address these issues simulated data has been
studied for the use of pedestrian detection (Fabbri et
al., 2021), general object detection (Tremblay et al.,
2018), pose estimation (Chen et al., 2016) and many
other use cases, see (Schraml, 2019) and (Mumuni et
al., 2024) for further examples. Synthesizing image
data with 3D modelling tools enables the creation of
precisely controlled datasets with automatically
generated error-free annotations (de Melo et al.,
2022). The use of photorealistic synthetic images to
train semantic segmentation algorithms has also been
successfully applied to the visual inspection of
production parts (Gutierrez et al., 2021). Increased
realism of the synthetic training images has been
shown to have a significant impact on the
performance of Convolutional Neural Networks,
especially in combination with domain
randomization.
Domain randomization (Tobin et al., 2017) is a
technique that randomizes specific conditions inside
the simulation by randomizing the parameters, such
as colour, texture, position, and orientation, during
the data generation process. Borrego et al achieved
significant performance improvements applying this
technique by finetuning a model with synthetic image
data for multi-category object detection (Borrego et
al., 2018).
By exposing the model to a wide variation of data
and scenarios we aim to improve the domain adaption
of the deep learning model and prepare it for
unexpected situations in the manufacturing
environment.
The goal of domain adaption (Lee et al., 2020) is
to reduce the gap between real and synthetic data.
This is especially important when using different
domains for creating the model, such as using a
synthetic dataset for the training process and
generalizing the model on a real dataset. The
generation of a highly realistic synthetic dataset can
be achieved with 3D modelling software or rendering
solutions using physically accurate and GPU-
accelerated rendering solutions, such as Maxwell
Render 5, which is built on the Nvidia CUDA
computing platform (Maxwell Documentation, 2024).
The generation of the synthetic data itself follows
the concept of generative partial modelling, a
technique that simplifies the analysis of complex
systems by focusing on a specific set of features from
the real world. In our case this set of features consists
of the shape of the manufactured part, its location and
rotation in the production environment, the textures
including potential defects, as well as environmental
properties that affect the object, like lighting or the
camera setup.
3 MATERIALS AND METHODS
3.1 Digital Reality Concept
We base our simulation pipeline on the digital reality
concept (Dahmen et al., 2019). The idea behind this
concept is to build parametrizable partial models
governing geometry, textures, lighting, camera
settings and defects among others, which can be
combined in a modular way into a generative scenario
describing all aspects of the object and its
environment we want to simulate (figure 1). This
scenario model acts as a digital twin that can be
sampled using different parametrizations of the
partial models to obtain an arbitrary amount of
rendered training images with the desired properties
for subsequent AI model training. Partial models we
want to describe in greater detail in this section are
the geometric model of the object's shape (section
3.2), its surface texture model (section 3.3) and the
defect model of possible manufacturing faults
(section 3.4).
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
38

Figure 1: Digital reality concept diaphragm spring.
For the digital twin we use techniques like texture
and geometry parameterisation, procedural texture
synthesis, parametric damage modelling and
characterization, as well as deep learning for defect
detection to evaluate the quality of the synthesised
dataset. The following sections describe the
development and implementation of these techniques
based on creating a digital twin of a diaphragm spring
provided by ZF Friedrichshafen AG. With the help of
this production part, we design our synthetic data
creation pipeline to be scalable and usable for
different real-world production scenarios.
3.2 Geometry Modelling
The 3D model of the digital twin of the production
environment is realized in Maxon Cinema 4D R21.
The simulation environment is created based on
images and information about the size and position of
the object it contains. The position of the lighting and
other influences that affect the component to be
simulated are particularly important to be able to
recreate a representation as physically accurate as
possible. The object itself is then placed in this digital
twin of the production environment and is properly
Figure 2: Cinema 4D scene and viewport rendering.
aligned based on real images. Figure 2 shows an
exemplary placement and rendering of the diaphragm
spring inside the Cinema 4D viewport.
We use the Cinema 4D dynamic simulation
feature for the correct positioning of the object to
avoid polygon overlapping. For the simulation and
modelling of realistic surfaces for the diaphragm
spring, we use various texture mapping techniques as
part of the automation process to represent complex
and customisable materials in the synthetic
environment. To compute these textures in a
reproducible and automatable process, we use tools
and algorithms available in the software Substance
Designer 3D from Adobe.
3.3 Defect Modelling
The creation of realistic surface defects requires a
precise characterisation of all damage types that could
occur in the production. Ideally, a material scientific
model for the defect formation and shape is available.
In real life, this is almost never the case, so we must
manage with images of real defects only, which again
are often only available in a very limited quantity. For
our use case, we use a defect catalogue provided from
ZF Friedrichshafen AG, containing images of real
defects from the production line, as well as several
physical diaphragm springs to gain an understanding
of the different defect forms. These can range from
scratches and small indents to material inclusions or
broken-out material. To simulate the defects on the
surface of the virtual object, we use the displacement
mapping technique (Cook, 1984).
Geometry
- Polygon model
- Placement
- Quantity
Camera
- Parameters
- Orientation
- Placement
Lighting
- Angle
- Intensity
-Temperature
Defects
- Form
-Depth
- Positioning
Textures
- Parameters
- Surface depth
- Generation
Dynamic
simulation
- Animation
- Collision
- Movement
A Scalable Synthetic Data Creation Pipeline for AI-Based Automated Optical Quality Control
39
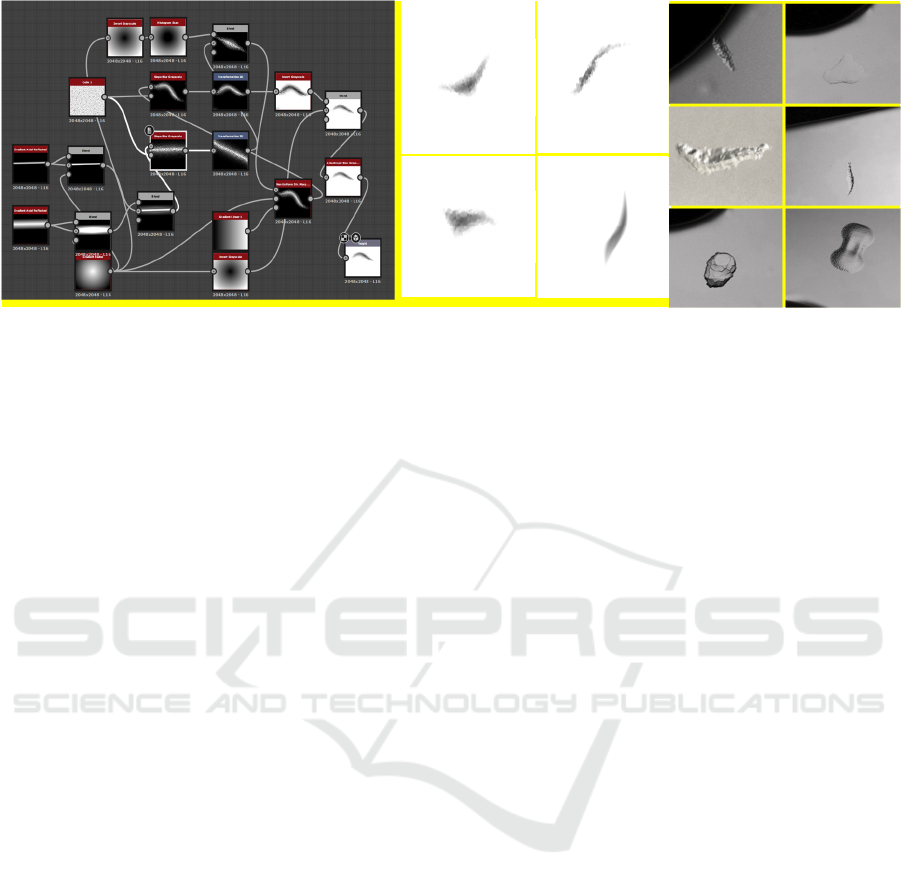
Figure 3: Structure of the Substance Designer 3D defect creation workflow, resulting defect textures and rendered examples.
In our case, this approach starts with the defect-
free surface of a three-dimensional object and
modifies it to add defects. An 8-bit RGB texture
called a displacement map or height map is used for
this purpose, which contains information about the
displacement of the polygon mesh at every point in
the form of a grey value in each pixel. As the actual
polygon mesh of the object is changed during
displacement mapping, the number of polygons may
have to be greatly increased to create a realistic and
detailed surface.
This technique improves reflection effects and
ensure that the surface deviation of defects is always
visible, even if they are viewed from a steep angle.
For the generation of the displacement maps we
utilize the software Substance Designer 3D from
Adobe, which allows us to procedurally generate
complex surfaces and materials through a node-based
workflow (figure 3). The individual nodes consist of
various mathematical image operations, which are
connected in series to model the corresponding defect
from a basic geometric shape. The nodes were
selected in such a way that a change of individual
values within the image processing operation has
comprehensible effects on the displacement maps
created to obtain an estimate of the extent to which
these can be changed so that as many different
realistic variants of the modelled defect as possible
can be created. This automation technique is based
entirely on the procedural modification of individual
values within the nodes.
To simplify the automation process, a Python
plugin for Substance Designer was developed, which
offers simple customisation options for adapting the
generation process to new defects or other Substance
Designer graphs. The plugin is configured via a JSON
file that contains information or IDs of the individual
mathematical operations, the corresponding
variables, and a list of possible values. Within the
automatic process, each node configured in the JSON
file is iterated over and the graph is recalculated for
each value used, thus generating an arbitrary number
of output textures. The advantage of this procedural
process is that the resulting displacement maps are
precisely defined by a suitably selected graph,
duplicates can be avoided, and the result is
correspondingly predictable.
The resulting displacement maps for the defects
must now be applied to the texture corresponding to
the correct location on the diaphragm spring. This
requires mapping the 3D mesh of the object to a 2D
texture, which we realized within Cinema 4D´s UV
editor.
For the placement of the defect, we developed a
comprehensible python workflow, executable in
Jupyter notebooks. For this, we first need to mark all
polygons of the 3D object, where a defect can occur.
The script can then be used to export this selection
into a mask and automatically scale and place the
defect texture within the exported mask on the final
displacement texture for the object.
3.4 Texture Modelling
Besides the damage modelling, we also need textures
to control the reflections and colouring of the
simulated object and environment, to achieve a
realistic result. For this reason, we expanded the
functionality of our defect generation Python plugin
to be able to automate all kinds of texture graphs.
Substance Designer's extensive library makes it easy
to find suitable textures, manipulate and randomize
them in a targeted manner.
In case of the simulation of the diaphragm spring,
which is made of slightly reflective steel with some
production induced discolorations, we need two
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
40

components - a colour map and a normal map. The
colour map will be used to simulate blemishes on the
surface that do not indent the diaphragm spring itself
in a significant way. The normal map will simulate
deeper indents and impurities that affect the depth of
the surface but still are not classified as defect.
Normal mapping is a texturing technique that
simulates the appearance of dents and bumps without
changing the actual polygon mesh (Cignoni et al.,
1998). It uses a normal map to change the way the
surface reflects light by storing the alignment of the
surface normal in each pixel as a RGB value that
corresponds directly to the x, y, and z coordinates of
the 3D environment.
Realistic normal maps play a key role for the
variety of the synthetic dataset, since we use them to
simulate imperfections on the surface which are not
classified as a defect and should not be identified as
such by our deep learning model. A multitude of
different normal maps should therefore reduce the
number of false positives detected by the model. For
the basis of the normal map, we characterized the
surface of numerous real diaphragm springs, as well
as the images from the real dataset from the
production line. This resulted in multiple different
Substance Designer 3D graphs, each highlighting
distinct aspects of the surface for more individual
control. For example, small scratches that can occur
during machining were simulated by generating
random splines on the surface, specks of dirt by
overlaying randomly generated grunge maps, or the
surface composition itself by choosing different
combinations of noise generators.
Each of these workflows is then automated with
the help of our Substance Designer plugin, for which
we specify the values that can occur within individual
nodes in a configuration file for each graph.
For the stamped part number on the diaphragm
spring, we utilized Cinema 4D´s bump mapping
feature, which uses a technique similar to normal
mapping, but is configured via grayscale values
instead of RGB information and is available inside a
different material channel. The bump maps were
generated by placing random numbers along a spline
corresponding to the location, where the stamp can
occur on the diaphragm spring´s texture.
Afterwards we selected some generated textures
from each automated texture graph and inserted them
into the Cinema 4D material for the diaphragm
spring, to ensure that they achieve the desired effect.
1
Maxon Cinema 4D R23 Handbook: Material Editor:
Reflectance
Figure 4: Rendered image/defect mask/object mask.
This also helps finding the right configuration for
the material settings, so we can finetune different
materials for specific visual effects for later
automation purposes. For the reflection layer of the
material, the GGX reflection model is used together
with the metal absorption presetting. This model is
particularly suitable for simulating metallic surfaces
1
.
3.5 Rendering Pipeline
Finally, the components created from the previously
developed methods are combined and assembled in
an automatic pipeline to generate the desired
synthetic image data of the diaphragm spring.
We developed two approaches to automate this
process with either Cinema 4D´s internal render
solutions or Maxwell Render 5´s engine. Although
these two methods overlap in their basic
functionality, they offer different advantages and
disadvantages when customised more precisely for
different production parts or processes.
Our first approach utilizes the Python API of
Maxwell Render 5 in combination with the digital
twin exported from Cinema4D. It is parametrized via
a configuration file, from where all elementary
functions of the Python automation script can be
accessed. We chose this variable configuration
concept for better scalability, so that new functions or
scenarios can be implemented into our automation
script with little effort. Furthermore, this concept
allows us to easily run the automation script on a
separate rendering server and profit from the GPU
Render Engine from Maxwell Render to minimize the
required runtime.
The current configuration file can be divided into
the following broad parent categories for configuring
and randomising the simulation. It contains the paths
to all the folder and files necessary for the simulation,
such as texture and output directories, settings to
configure which textures should be randomized and
the range within the texture parameters can be
changed, dynamic simulation parameters that affect
the physical environment, such as object rotation and
placement, configuration options for automatically
A Scalable Synthetic Data Creation Pipeline for AI-Based Automated Optical Quality Control
41
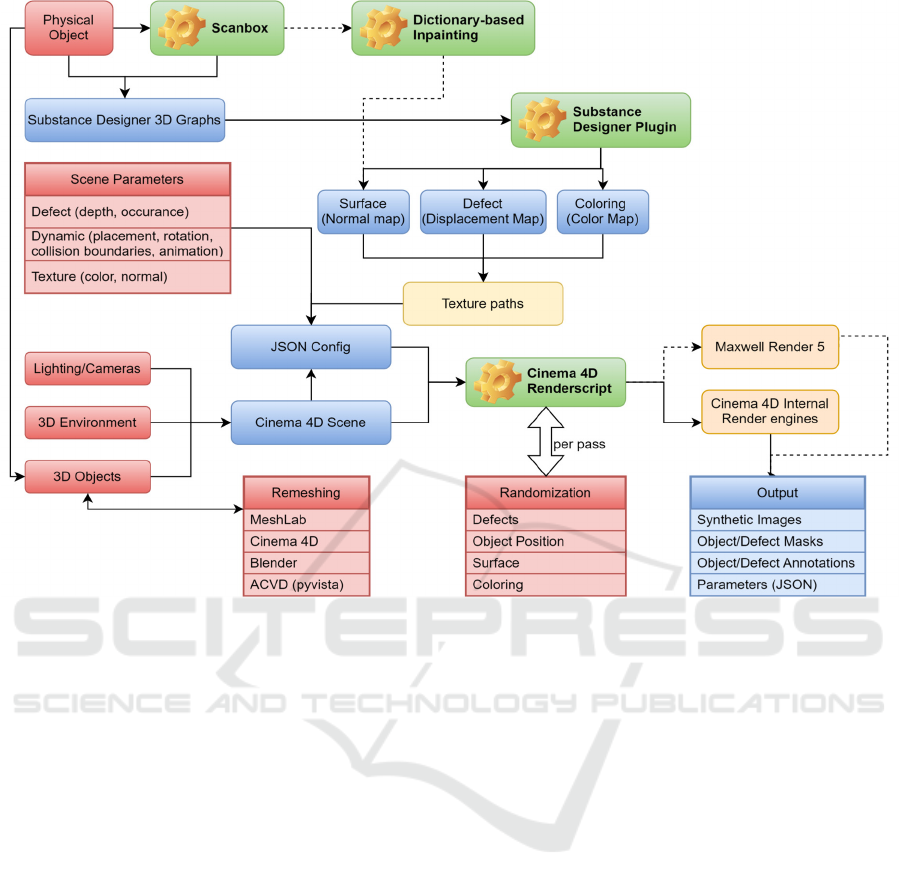
Figure 5: Flowchart of the rendering pipeline.
generated annotations, including options for multiple
object and defects and settings that affect the
rendering process, such as number of renderings,
render quality settings and additional command line
arguments for the render engine.
To improve the physical accuracy of the rendered
images, the basis for a simple simulation of the
physical properties of the environment was created.
This means that basic rules for placing the objects in
the scene can be defined in the configuration file in
such a way that overlapping polygon meshes of the
objects can be minimised or completely excluded.
This also makes it possible to create simulations with
multiple objects in which the objects can be randomly
distributed in the scene.
For each object and defect in the scene, a mask
with the respective segmented defect or object is
output for each rendered image (figure 4), as well as
a text file containing information about the
corresponding bounding box in YOLO PyTorch TXT
format.
The second automation approach we created
relies purely on Cinema 4D and its internal render
solutions. This development was initiated in order to
have more direct customizations of the Cinema 4D
scene or simulation itself available, as the Python
interface of Cinema 4D offers a few more
configuration options than that of the Maxwell
Render engine.
In addition, one of the Cinema 4D internal render
engines can be used for certain components, which
reduces the required runtime of the automatic
rendering process in some cases. The use of the
dynamic simulation engine opens further possibilities
for the physically accurate placement of objects
within a scene and can also be used in conjunction
with the Maxwell render script, for more realistic
lighting conditions in the final rendering. Cinema 4D
offers far more configuration options for materials,
making it possible to customise the finer details of the
materials and surfaces and add specific markings or
effects to the rendered industrial component. It is also
possible to use other functions of Cinema 4D, such as
the creation of animation videos or the use of various
generators for modelling objects/scenes during the
rendering process. The basic concept of the Cinema
4D automation script is still very similar to the
Maxwell script and offers, among other things, the
same functions. The configuration is carried out via a
config file, the Cinema 4D scene itself and the
textures required for randomisation.
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
42
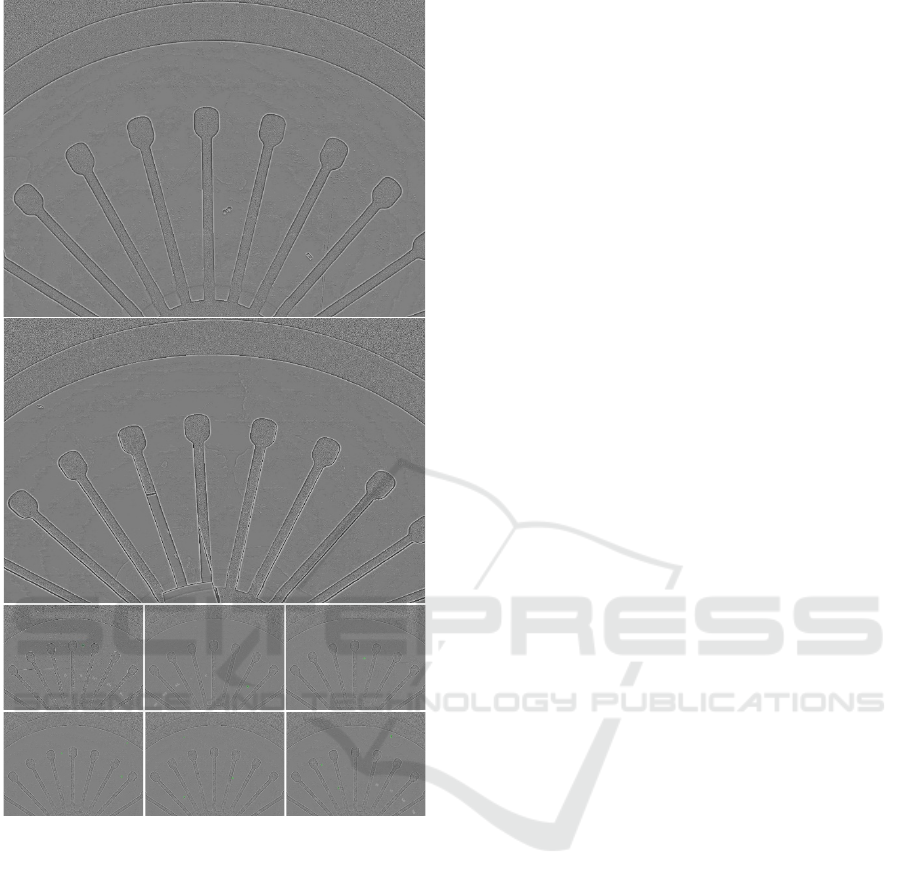
Figure 6: Synthetic images with different defects and
normal maps generated by the rendering pipeline.
As output, we receive the rendered image, a
binary mask for each object and defect in the scene
and a JSON file for each image. The mask(s) for the
defect(s) are created by automatically going through
an additional rendering pass, where all textures,
except for the displacement map are removed, leading
to a rendering where only the defects are illuminated.
The mask(s) for the object(s) are generated by using
Cinema 4D´s own multiple-render-pass function,
which will create a mask for each specified object.
The JSON file, contains information about rendering
parameters, including textures used, strength of
normal map and bump mapping, as well as the
strength of the defect.
For the synthetic dataset, which is used for
supplementing the real dataset, we generated images
with the same configuration, but a different lighting
environment and processed them with the help of
another script to simulate the image process that is
already used in the real production. Figure 6
showcases some rendered image examples of the
diaphragm spring with different automatically
generated defects and normal maps from the resulting
synthetic dataset.
3.6 Automated Defect Detection
There are many deep learning architectures suitable
for detecting defects. Due to the precise information
on the position of the defects, which is simulated and
annotated with the help of the synthetic data, it was
decided to localise the defects to simplify subsequent
manual quality checks of the predictions.
Object detection algorithms such as YOLO (Redmon
et al., 2016) or R-CNN (Ren et al., 2017), but also
segmentation approaches such as U-NET
(Ronneberger et al., 2015) or Mask-R-CNN (He et al.,
2020) are suitable for such purposes.
With respect to the fact that the synthetic data can
later be used to supplement real data from the
production, the creation of the model for the pipeline
was based on the conditions of the production
environment and existing real image data from this
environment. For this purpose, we were provided a
real image data set with images from the current
production as well as a defect catalogue containing
information on which surface anomalies have already
been classified as defects on the diaphragm springs.
The real images were manually annotated using
the defect catalogues by marking each defect with a
bounding box, so that the resulting real dataset can be
used to train deep learning models for object
detection. This dataset is used to train a baseline
model, which was exclusively trained with real data
from the production, as well as to evaluate the models
that were trained with the synthetic dataset and to
create a supplemented dataset containing real-world
and synthetic data.
To conduct initial tests, the deep learning model
"YOLOv8" from Ultralytics (Jocher et al., 2023) was
used. We chose this model for its low hardware
resource consumption for inference, its fast inference
rate and easy-to-use configuration options. We expect
that Mask-R-CNN or U-NET models will perform
comparably on the data set. Note that the focus of this
paper is the simulation pipeline and not an optimized
defect detection model, therefore we show only first
results on the impact of adding synthetic data.
A Scalable Synthetic Data Creation Pipeline for AI-Based Automated Optical Quality Control
43
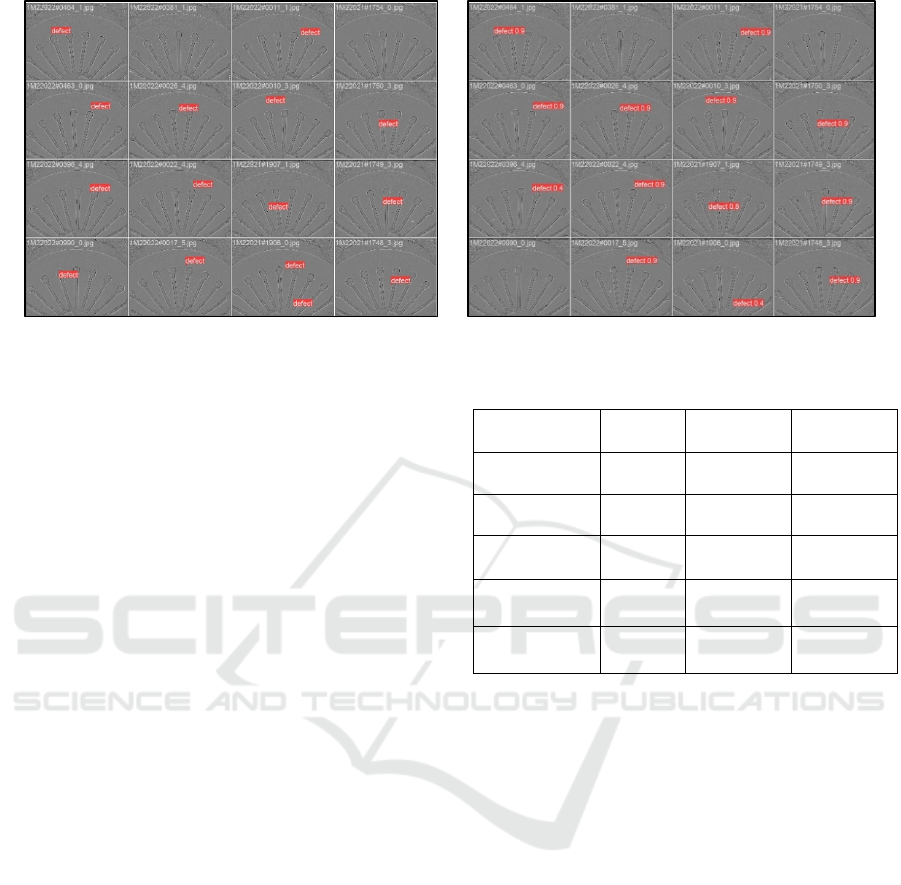
Figure 7: Defect detection Real + Synthetic V2: Ground Truth (left) / Prediction with Confidence (right).
The real image dataset from production used for
training consisted of a total of 231 images, 105 of
which were used for validation. A total of 300 images
were generated for the basic synthetic dataset, of
which 100 were without defects, 75 with multiple
defects and 125 with single defects. The second
version of the synthetic dataset was further
supplemented with 100 more single defect images
and 100 more images with multiple defects.
To assess the quality of the synthetic data in
comparison to the real-world data, the models were
trained with different datasets, and each evaluated
with the same validation data set consisting of 105
real-world images. The first model "Real" was trained
exclusively with real images from production,
"Synthetic v2" only with synthetic image data and for
the model "Real + Synthetic v1" and "Real +
Synthetic v2" these two training data sets were
combined.
All models were trained for 200 epochs, with an
image size of 1408x1408 pixels, a batch size of 32
and the SGD Optimiser (learning rate initial: 0.1,
learning rate final: 0.01). Since the defects were quite
small on the real production images, it was necessary
to use such a high image resolution for the training
process. For the evaluation of the resulting models,
we used the metrics Mean Average Precision at an
Intersection of Union threshold of 0.5, Precision and
Recall.
Based on the results in Table 1 it can be observed
that supplementing the real data set with the synthetic
image data in the "Real + Synthetic v1" model
improves the precision, while in "Real + Synthetic
v2" all of the three evaluation metrics improved
compared to the "Real" model. This improvement is
important when it comes to real production use of
such a model.
Table 1: Evaluation metrics of the training.
Dataset mAP Precision Recall
Real 0.672 0.703 0.655
Synthetic v1 0.207 0.268 0.306
Synthetic v2 0.343 0.428 0.575
Real +
S
y
nthetic v1
0.751 0.885 0.616
Real +
S
y
nthetic v2
0.785 0.911 0.658
To properly implement the model in an active
environment, we will still need to evaluate on more
real-world data and generate suitable and especially
more synthetic image data. Although the mAP of the
“Synthetic v2” model which was exclusively trained
on synthetic data is significantly lower, when
compared to the “Real” model, it also shows that the
synthetic data is quite close to the real data, since the
model can detect defects on the real data to some
degree. This also indicates that we can use synthetic
data to train a model to recognize defects it has never
seen before on real data. Note that these tests were
performed with the goal of assessing the impact of
using synthetic data and not of fine-tuning the model
for peak performance. Additional hyperparameter
optimization is expected to improve the metrics
further. Increasing the amount of synthetic data
further will also bring additional improvements.
4 CONCLUSION & OUTLOOK
In this work we presented a digital reality pipeline to
create synthetic image data that can be applied to
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
44

visual quality inspection. We demonstrated that our
approach can be used to train deep learning models
and improve the performance of models when used in
combination with real data.
The digital reality pipeline is designed for low
manual configuration effort allowing for a quick,
affordable, and thus broad use in industry. We have
analysed numerous processes and previous
developments in this area, adapted and improved
them, and combined these methods in a toolbox to
enable easy implementation for different production
parts. The main advantage of our approach compared
to other simulation tools lies in the implementation of
the modular digital reality concept. The next step is to
conduct a comprehensive study with different types
of objects and more synthetic data in combination
with fine-tuning the object detection models to
elaborate on the preliminary results described in
section 3.6. Furthermore, the processes for synthetic
data generation and defect detection described in the
previous sections are suitable for integration as an
automated visual quality control system into an active
production environment. This requires a continuous
process to allow the defect detection model to be
improved or enriched with new data. An example of
this would be training with a new defect type that only
occurred on the object after the model has been
deployed. The digital reality concept of using partial
models reduces the workload of integrating this new
defect type to parameterising the defect model
accordingly and finetuning the deep learning model
with the newly generated data. In the future, we aim
to further evaluate the pipeline with additional use
cases and an integration study in a real production
environment.
ACKNOWLEDGEMENTS
Part of this research has been funded by the Ministry
of Economics, Innovation, Digitalisation and Energy
of Saarland under grant number D/2-ML-
SYNTHOM-7/2022.
REFERENCES
Bhatt, P. M., Malhan, R. K., Rajendran, P., Shah, B. C.,
Thakar, S., Yoon, Y. J., & Gupta, S. K. (2021). Image-
Based Surface Defect Detection Using Deep Learning:
A Review. Journal of Computing and Information
Science in Engineering, 21(4). https://doi.org/
10.1115/1.4049535
Borrego, J., Dehban, A., Figueiredo, R., Moreno, P.,
Bernardino, A., & Santos-Victor, J. (2018). Applying
Domain Randomization to Synthetic Data for Object
Category Detection. http://arxiv.org/abs/1807.09834
Chen, W., Wang, H., Li, Y., Su, H., Wang, Z., Tu, C.,
Lischinski, D., Cohen-Or, D., & Chen, B. (2016).
Synthesizing Training Images for Boosting Human 3D
Pose Estimation. 2016 Fourth International
Conference on 3D Vision (3DV), 479–488.
https://doi.org/10.1109/3DV.2016.58
Cignoni, P., Montani, C., Rocchini, C., & Scopigno, R.
(1998). A general method for preserving attribute
values on simplified meshes. Proceedings Visualization
’98 (Cat. No.98CB36276), 59–66. https://doi.org/
10.1109/VISUAL.1998.745285
Cook, R. L. (1984). Shade Trees. Computer Graphics
(ACM), 18(3), 223–231. https://doi.org/10.1145/
964965.808602
Dahmen, T., Trampert, P., Boughorbel, F., Sprenger, J.,
Klusch, M., Fischer, K., Kübel, C., & Slusallek, P.
(2019). Damen et al. (2019). Digital reality. A model-
based approach to supervised learning from synthetic
data.pdf. 1–12.
de Melo, C. M., Torralba, A., Guibas, L., DiCarlo, J.,
Chellappa, R., & Hodgins, J. (2022). Next-generation
deep learning based on simulators and synthetic data.
Trends in Cognitive Sciences, 26(2), 174–187.
https://doi.org/10.1016/j.tics.2021.11.008
Fabbri, M., Brasó, G., Maugeri, G., Cetintas, O., Gasparini,
R., Ošep, A., Calderara, S., Leal-Taixé, L., &
Cucchiara, R. (2021). MOTSynth: How Can Synthetic
Data Help Pedestrian Detection and Tracking? 2021
IEEE/CVF International Conference on Computer
Vision (ICCV), 10829–10839. https://doi.org/
10.1109/ICCV48922.2021.01067
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., & Bengio,
Y. (2014). Generative Adversarial Nets. In Z.
Ghahramani, M. Welling, C. Cortes, N. Lawrence, & K.
Q. Weinberger (Eds.), Advances in Neural Information
Processing Systems (Vol. 27). Curran Associates, Inc.
https://proceedings.neurips.cc/paper_files/paper/2014/f
ile/5ca3e9b122f61f8f06494c97b1afccf3-Paper.pdf
Gutierrez, P., Luschkova, M., Cordier, A., Shukor, M.,
Schappert, M., & Dahmen, T. (2021). Synthetic training
data generation for deep learning based quality
inspection. https://doi.org/10.1117/12.2586824
He, K., Gkioxari, G., Dollár, P., & Girshick, R. (2020).
Mask R-CNN. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 42(2), 386–397.
https://doi.org/10.1109/TPAMI.2018.2844175
Jain, S., Seth, G., Paruthi, A., Soni, U., & Kumar, G. (2022).
Synthetic data augmentation for surface defect
detection and classification using deep learning.
Journal of Intelligent Manufacturing
, 33(4), 1007–
1020. https://doi.org/10.1007/s10845-020-01710-x
Jocher, G., Chaurasia, A., & Qiu, J. (2023). Ultralytics
YOLOv8. https://github.com/ultralytics/ultralytics
Lee, S., Park, E., Yi, H., & Lee, S. H. (2020). StRDAN:
Synthetic-to-real domain adaptation network for
A Scalable Synthetic Data Creation Pipeline for AI-Based Automated Optical Quality Control
45

vehicle re-identification. IEEE Computer Society
Conference on Computer Vision and Pattern
Recognition Workshops, 2020-June, 2590–2597.
https://doi.org/10.1109/CVPRW50498.2020.00312
Li, J., Su, Z., Geng, J., & Yin, Y. (2018). Real-time
Detection of Steel Strip Surface Defects Based on
Improved YOLO Detection Network. IFAC-
PapersOnLine, 51(21), 76–81. https://doi.org/10.1016/
j.ifacol.2018.09.412
Li, S., & Wang, X. (2022). YOLOv5-based Defect
Detection Model for Hot Rolled Strip Steel. Journal of
Physics: Conference Series, 2171(1), 1–7.
https://doi.org/10.1088/1742-6596/2171/1/012040
Maxwell Documentation. (2024). https://nextlimitsupport.
atlassian.net/wiki/spaces/maxwell/pages/22683383/GP
U+engine
Mazzetto, M., Teixeira, M., Rodrigues, É. O., & Casanova,
D. (2020). Deep Learning Models for Visual Inspection
on Automotive Assembling Line. International Journal
of Advanced Engineering Research and Science, 7(3),
473–494. https://doi.org/10.22161/ijaers.74.56
Mumuni, A., Mumuni, F., & Gerrar, N. K. (2024). A survey
of synthetic data augmentation methods in computer
vision. https://arxiv.org/abs/2403.10075v2
Redmon, J., Divvala, S., Girshick, R., & Farhadi, A. (2016).
You Only Look Once: Unified, Real-Time Object
Detection. 2016 IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), 779–788.
https://doi.org/10.1109/CVPR.2016.91
Ren, S., He, K., Girshick, R., & Sun, J. (2017). Faster R-
CNN: Towards Real-Time Object Detection with
Region Proposal Networks. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 39(6),
1137–1149. https://doi.org/10.1109/TPAMI.2016.2577
031
Ronneberger, O., Fischer, P., & Brox, T. (2015). U-net:
Convolutional networks for biomedical image
segmentation. Lecture Notes in Computer Science
(Including Subseries Lecture Notes in Artificial
Intelligence and Lecture Notes in Bioinformatics),
9351. https://doi.org/10.1007/978-3-319-24574-4_28
Schraml, D. (2019). Physically based synthetic image
generation for machine learning: a review of pertinent
literature. September 2019, 51. https://doi.org/10.1117/
12.2533485
Tobin, J., Fong, R., Ray, A., Schneider, J., Zaremba, W., &
Abbeel, P. (2017). Domain randomization for
transferring deep neural networks from simulation to
the real world. IEEE International Conference on
Intelligent Robots and Systems, 2017-Septe, 23–30.
https://doi.org/10.1109/IROS.2017.8202133
Tremblay, J., Prakash, A., Acuna, D., Brophy, M., Jampani,
V., Anil, C., To, T., Cameracci, E., Boochoon, S., &
Birchfield, S. (2018). Training Deep Networks with
Synthetic Data: Bridging the Reality Gap by Domain
Randomization. 2018 IEEE/CVF Conference on
Computer Vision and Pattern Recognition Workshops
(CVPRW), 1082–10828. https://doi.org/10.1109/CV
PRW.2018.00143
Wang, Y., Hao, Z., Zuo, F., & Pan, S. (2021). A fabric
defect detection system based improved YOLOv5
detector. Journal of Physics: Conference Series,
2010(1). https://doi.org/10.1088/1742-6596/2010/1/0
12191
SIMULTECH 2024 - 14th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
46
