
Dynamic Prices in Ride-Sharing Scenarios*
Lech Duraj
a
and Grzegorz Herman
b
Theoretical Computer Science, Faculty of Mathematics and Computer Science, Jagiellonian University, Krak
´
ow, Poland
Keywords:
Pricing Strategy, Dynamic Pricing, Ride Sharing, Dial-a-Ride.
Abstract:
We describe a dynamic pricing strategy applicable to ride-sharing scenarios in public transportation services.
The strategy incorporates data about relation popularity and price acceptance rates. Crucially, it captures in-
terdependencies between tickets for different relations served by a single vehicle, and thus is able to balance
out locally optimal pricing with the expected future evolution of vehicle occupancy state. Based on historical
data about a real-world ride-sharing operator, we demonstrate that the proposed method is robust to imperfec-
tions in the input data, and estimate it to be more profitable than both fixed-price strategies (even theoretically
optimal), and an actual dynamic pricing strategy prescribed by business experts.
1 INTRODUCTION
Pricing strategies in transportation systems are an im-
portant mechanism that can be used to achieve many
different goals, like managing demand, avoiding con-
gestions, driving transportation choices, or promoting
equity. There is a vast literature on design of pricing
strategies for classical transportation systems, see for
example (Cervero, 1990; Fosgerau and Van Dender,
2013; Eliasson, 2021). Dynamic pricing strategies
were first adopted by airline companies, and have now
become ubiquitous across various modes of trans-
portation (McGill and van Ryzin, 1999; den Boer,
2015; Selc¸uk and Avs¸ar, 2019) despite raising mul-
tiple concerns (Seele et al., 2021). Design of dynamic
pricing strategies is particularly important for intelli-
gent transportation systems (Saharan et al., 2020).
The particular case of designing pricing strategies
for bus services (Augustin et al., 2014), falls into a
more general category of pricing strategies with fi-
nite horizon (Gallego and van Ryzin, 1994; DiMicco
et al., 2001; Elmaghraby and Keskinocak, 2003). The
key operational difference from other industries such
as airline services lies in offering tickets for specific
segments of the bus route rather than reserving seat
for the full route. The details of pricing strategies
used by many companies remain proprietary, with
a
https://orcid.org/0000-0002-0004-3751
b
https://orcid.org/0000-0001-6855-8316
∗
This work has been commissioned by Teroplan S.A.
and partially financed by European Union funds (grant
number: RPMP.01.02.01-12-0572/16-01).
limited publicly available information. There are at-
tempts (Geggero et al., 2019) to analyze such strate-
gies by means of reverse engineering.
In this paper we propose a dynamic pricing al-
gorithm for long-distance ride-sharing scenarios. In
the typical scenario we have a vehicle traveling along
a prescribed route and clients booking their tickets
for a travel between chosen pickup and delivery lo-
cations in advance. The algorithm is to decide the
price offered to each individual client in an on-line
setting with uncertainty over the future demand for
the service, and over the price acceptance of the cur-
rent client. Once a client accepts the price and pays
for the ticket, the operator must guarantee a seat in the
vehicle to accommodate the travel between requested
locations. The goal of our algorithm is to maximize
the profit for the operator.
In Section 2 we design a probabilistic description
that models the clients of the service. For that model
we describe an algorithm that maximizes the expected
profit of the operator. In Section 3 we analyze the per-
formance of our algorithm on slightly perturbed mod-
els to show that it is not sensitive to small errors in
the model description. Finally, in Section 4 we com-
pare the profits obtainable by our method with other
pricing strategies, using input data from a real-world
dial-a-ride service.
Duraj, L. and Herman, G.
Dynamic Prices in Ride-Sharing Scenarios.
DOI: 10.5220/0012722500003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 437-443
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
437

2 PRICING ALGORITHM
A data-driven dynamic pricing strategy needs to suc-
cessfully combine the following two aspects: on the
one hand, it might be computationally expensive to
compute optimal prices for each client, and on the
other, we need to be able to react to the arrival of
new clients in real time. Furthermore, the time-
dependency of the prices makes it impractical to pre-
compute them for all possible situations.
Therefore, our strategy is divided into two phases:
an offline phase in which we precompute information
in a time-independent way, and an online phase in
which we can quickly use this information to serve
the clients. The details of these phases are presented
in the following subsections.
2.1 Input Data
Before we present the details of our pricing algorithm,
let us first discuss the data which is required to run it.
For each aspect below, we give a brief description of
how it is modeled and some intuition behind it. Pro-
viding actual high-quality model of each aspect is an
interesting research problem on its own, but these are
out of the scope of this paper. We do, however (in
Section 3), evaluate the robustness of our algorithm
with respect to the quality of the input data.
Vehicle Occupancy and Cost. Consider a vehicle
traveling along a prescribed route, picking up and
dropping off clients at various towns. It is often possi-
ble to serve a number of clients exceeding the capac-
ity of the vehicle, because some of them may travel
on non-overlapping parts of the route, and thus “share
a seat”. To capture this, we need a way of modeling
the occupancy of the vehicle.
Unfortunately, the number of possible combina-
tions of clients served by the vehicle is usually pro-
hibitively large to model explicitly. Therefore, we
propose a more general model, which may abstract
away some of the details of vehicle occupancy, while
still handling the most profitable “seat sharing” situa-
tions (see also Section 5 for possible extensions).
Let the route be given as a set R of relations (i.e.,
pairs of towns). Each client, though able to specify
their exact pickup and dropoff locations, will be as-
signed to one of these relations. We model vehicle
occupancy by a finite automaton (Σ, T, η), where:
• Σ is a finite set of abstract occupancy states, with
a distinguished initial state s
0
corresponding to
the vehicle serving no clients (as an example, each
state might encode the number of occupied seats
on each of some coarse-grained segments of the
route),
• T is a finite set of client types, with an associ-
ated mapping τ : R → T assigning each relation
to a type (e.g., each type might correspond to a
set of route segments, with τ giving the segments
“touched” by a relation), and
• η: Σ × T → Σ is a partial transition function,
specifying how the occupancy state changes when
a client of a given type is sold a ticket (e.g., in-
crementing the number of occupied seats on each
segment of the client type).
For each state of the automaton, we also need to be
given the cost of operating the vehicle in that state.
Price Acceptance. For each relation r ∈ R and each
price, we need an estimated probability that a client
will accept the offer. It is reasonable to assume that
this probability is a non-increasing function of the
price. We require it to be given as a piecewise lin-
ear function a
r
: R → [0, 1] (with an arbitrary number
of pieces), called the (price) acceptance profile.
Relation Popularity. Individual relations served by
the route might differ in both how they affect the vehi-
cle automaton, and in their price acceptance profiles.
Therefore, we need to know how popular they are,
i.e., what is the probability that a random client will
want to travel between two given locations. Please
note that we assume the relative popularity of re-
lations to be constant over time—this finite (rela-
tion) popularity distribution D : R → [0, 1], with
∑
r
D(r) = 1, is taken as an input.
Client Demand. We model the arrival of new
clients as a variable-rate Poisson process. The algo-
rithm is given the rate of this process, as a function ρ
of the time left until the vehicle departs from its initial
location (this is the latest moment when it is possi-
ble to offer new tickets for all relations served by the
route).
2.2 Offline Phase
The goal of the offline phase is to estimate the ex-
pected profit S(s, k) from serving any given number k
of clients, starting from any given occupancy state s.
Let us take a single price acceptance profile, i.e.,
a piecewise linear function a
r
: R → [0, 1], and con-
sider offering a price x to a client with this profile.
Depending on whether they accept it or not, the ve-
hicle will transition to a new state, and thus the ex-
pected future profit will change by some amount δ.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
438

Assume for the moment that δ is given. For an offer
x, our expected total gain including the current client
is thus a
r
(x) · (x + δ). In each piece, a
r
(x) is linear,
and therefore the gain is maximized by offering some
price ˆx
r
(δ), linear in δ, with the gain itself quadratic in
δ. Considering and comparing all the pieces, we form
a piecewise quadratic function g
r
, giving, for each δ,
the maximal expected gain from offering ˆx
r
(δ) for any
piece of a
r
.
We compute the function g
r
separately from the
price acceptance profile of each relation r, and use
the relation popularity distribution D and client type
mapping τ to combine them into functions G
t
, one for
each client type t:
G
t
(δ) = E
D
[g
r
(δ)| τ(r) = t ] .
Independently, we aggregate relation popularity
by client type, obtaining, for each t, the probability
p
t
that a random arriving client is of type t.
With the above information, we are now ready to
compute the pricing strategy—a two-dimensional ta-
ble, giving for each occupancy state s and each num-
ber k = 0, 1, . . . of future clients, the expected total
gain S(s, k) from optimally serving exactly k clients,
starting from state s. We compute it using dynamic
programming, as follows:
• For k = 0, no clients will arrive, so the gain is
simply the negated cost of operating the vehicle
in state s.
• For k > 0, we consider each type t of the first
arriving client, allowed in state s. The probabil-
ity of this event is p
t
(these probabilities may not
sum to one, because we might not be able to serve
all types of clients). If the client accepts our of-
fer, we will transition to a new state s
′
= η(s,t),
and if not, we will remain in s. Thus, their accep-
tance would change our expected future profit by
δ = S(s
′
, k − 1) − S(s, k − 1). We know that offer-
ing an optimal price (whatever it may be) in such
a case would change the profit by G
t
(δ). Comput-
ing the expectation over all types of clients, we
obtain
S(s, k) = S(s, k − 1)+
+
∑
t
p
t
· G
t
(S(η(s,t), k − 1) − S(s, k − 1)).
2.3 Online Phase
Having precomputed the pricing strategy, we are
ready to serve the clients. Consider an arrival of a
client interested in traveling on relation r, happening
when the vehicle is in state s.
First, we calculate the expected number c of
clients who are yet to arrive, as the integral of the de-
mand rate function over the remaining time. Because
client arrivals are modeled as a Poisson process, from
c we can easily obtain, for each k, the probability c
k
that exactly k clients will yet arrive.
Should the current client accept our offer, we
would transition to a new state s
′
= η(s, τ(r)), and
expect to gain
∑
k
c
k
· S(s
′
, k) in the future. If they re-
ject it, we would remain in state s, and expect to gain
∑
k
c
k
· S(s, k) instead. Letting δ be the difference be-
tween the two values, we now offer the optimal price
from among the precomputed ˆx
r
(δ).
Note, that the above summation over k is formally
infinite. In practice, we clip it to some finite value
K, chosen to make the tail of the Poisson distribution
negligible. K needs to be fixed when the pricing strat-
egy is computed, and thus be large enough to cover
all possible values of c. Actually, one does not need
to go further than a few times the capacity of the ve-
hicle, because with a high probability of significantly
more clients arriving, it is better to operate multiple
vehicles in parallel.
3 ROBUSTNESS
As we have already mentioned, feeding our method
with high-quality input data might be a challenging
task. It is therefore important to assess the influence
of imperfect data on the quality of the solution. To
this end, we have performed a series of simulations, in
which we have perturbed the inputs in various ways.
In each case, we have assumed the perturbed input to
model the reality, and compared the expected profit
of the strategy computed using the original input with
one computed using the perturbed (“actual”) input.
3.1 Experimental Setup
Input data for all experiments was provided by Tero-
plan S.A., and comes from a real-world dial-a-ride
service Hoper operating in Poland. The route being
analyzed runs through 50 towns over a span of about
400 km, and has been split into 3 segments. The ve-
hicle considered was a 9-seater minibus with a driver,
thus able to accommodate 8 passengers. Each occu-
pancy state encoded the number of passengers carried
over each of the segments, giving a total of 9
3
= 729
states.
For the sake of simplicity, we have assumed that
the operating costs are independent of the passengers
served, and set them to be zero, thus optimizing the
revenue rather than the profit.
Dynamic Prices in Ride-Sharing Scenarios
439
Price acceptance profiles for all relations served
by the route have been given the same general shape:
acceptance is constant 0.9 for prices up to some “low”
value, decreases linearly to 0.1 for prices up to some
“high” value, and finally drops linearly to 0 at some
“limit” value. The low, high, and limit values are in-
dependent for each relation, and have been specified
by business experts, based on the distance between
the endpoints of the relation, their importance, and
prices of standard (i.e., non-shared) services, if avail-
able.
Relation popularity distribution has been esti-
mated based on frequency of searches for particular
connections on the Hoper website, filtered to remove
the bias caused by multiple searches for the same or
similar connection by the same user.
Relative performance of different strategies does
not depend on the absolute demand rate, but only
on the relation between its predicted and actual val-
ues. Therefore, for robustness simulations, we have
assumed the actual demand rate to be a constant func-
tion of time (e.g., one client per hour).
In each experiment, we have simulated ticket sales
for a single vehicle, over a period of 24 time units (i.e.,
24 actual clients). The rationale behind this choice
is that when the actual demand is even higher, thus
significantly exceeding the capacity of two vehicles,
from business perspective it is better to operate two
vehicles in parallel, rather than optimize the profit
from a single one. For a discussion of extending our
method to multiple vehicles, see Section 5.
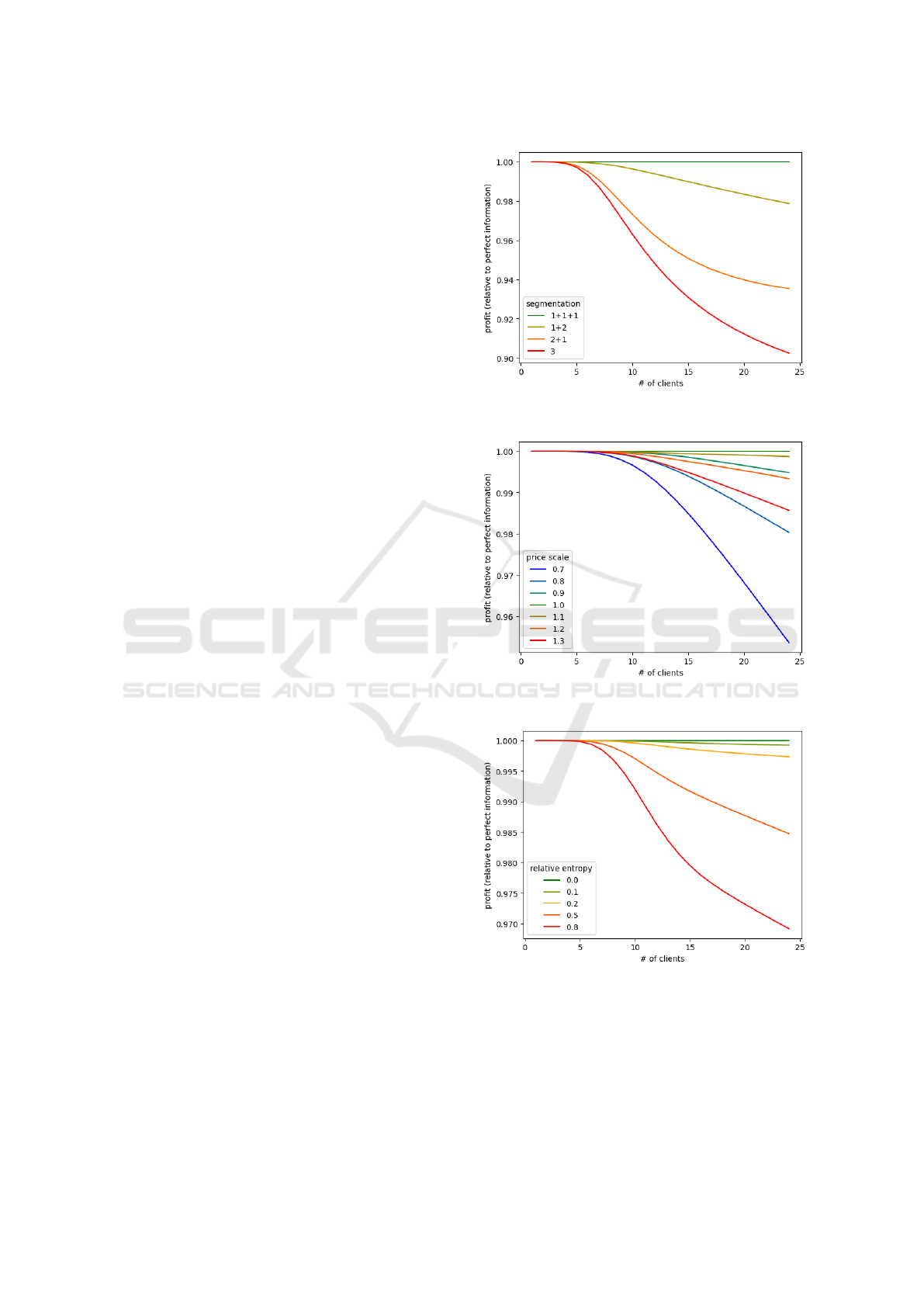
3.2 Results
Details about simulation scenarios are given below—
the plots for each case present, for different values
of perturbation parameters, the relative profit of the
strategy computed using original input, compared to
the one computed using the perturbed input (thus hav-
ing a perfect model of the simulated reality).
Route Segmentation. In original data, the route has
been manually divided into segments based on popu-
larity of particular destinations. We have compared
this with all possible super-segmentations, obtained
by merging some consecutive segments (or, equiva-
lently, using only a subset of the split points). The re-
sults of this experiment are shown in Figure 1 (for ex-
ample, segmentation “1+2” denotes merging the sec-
ond and third of the original segments).
Price Acceptance. In each simulation, we have
multiplied the prices in the original acceptance pro-
files by a common constant factor, thus uniformly
Figure 1: Robustness to suboptimal route segmentation.
Figure 2: Robustness to acceptable price scaling.
Figure 3: Robustness to relation popularity randomization.
scaling the prices acceptable to all clients. The in-
fluence of this perturbation on the expected profit is
shown in Figure 2.
Relation Popularity. To model the uncertainty in
the popularity of relations, we have assumed that the
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
440
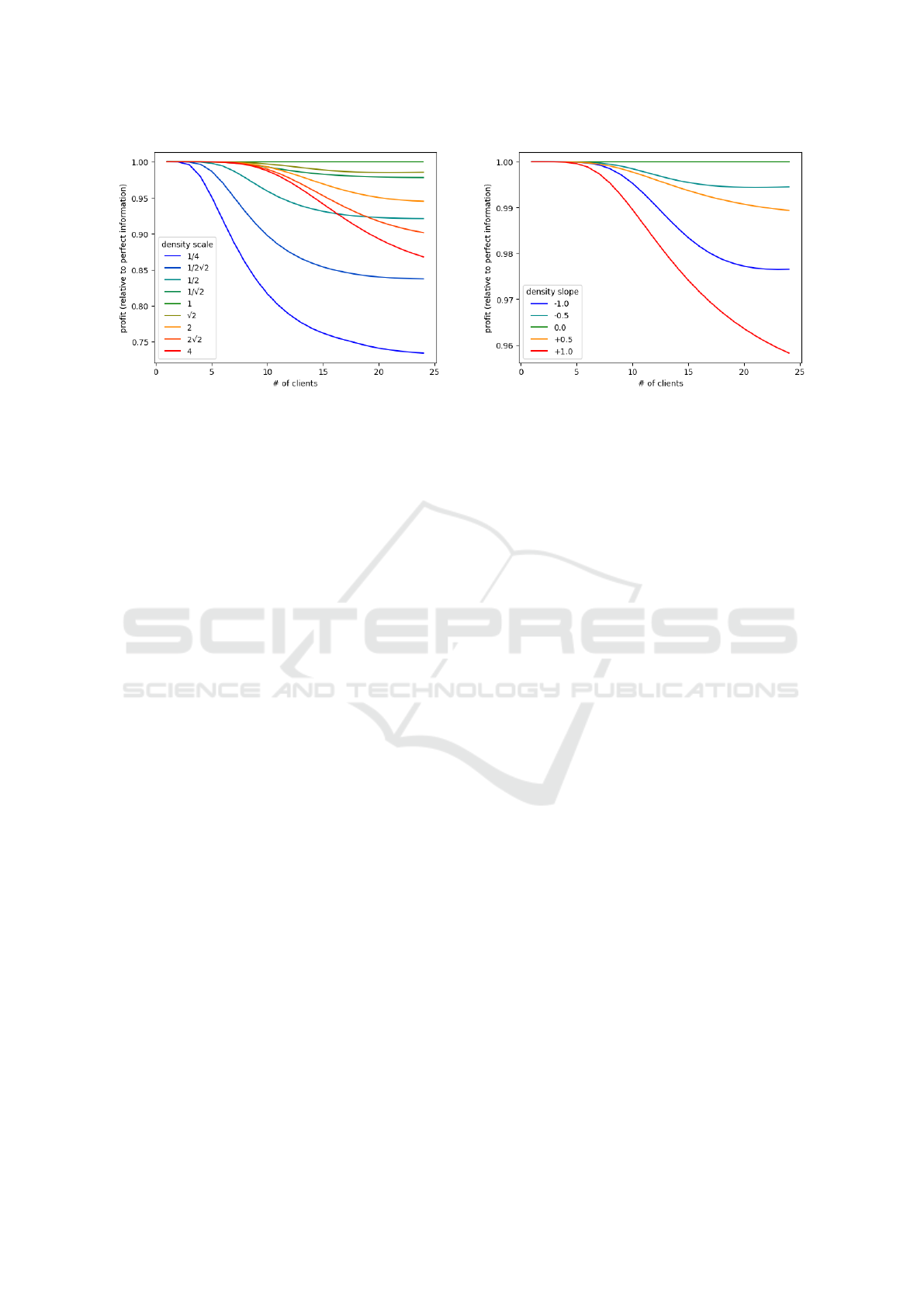
Figure 4: Robustness to client demand scaling.
actual popularity distribution is a random variable,
drawn from a Dirichlet distribution ∆. In each sce-
nario, we have drawn multiple samples from ∆, per-
formed independent simulations, and averaged the ex-
pected profit over them. In all cases, we have assumed
the expected value of ∆ to be the original distribution
D, and varied only the concentration parameter γ.
The results of these simulations are shown in Fig-
ure 3. Because the meaning of particular values of
γ depends heavily on D, in the plots we use an al-
ternative, equivalent parameterization. For each par-
ticular γ one might calculate the expected Kullback-
Leibler divergence d
γ
from D to a distribution ran-
domly drawn from ∆. We present d
γ
normalized by
its maximum possible value (for our fixed D)—this
way the value of zero corresponds to exactly the orig-
inal distribution, while the value of one to a mixture
of distributions, each assigning all probability mass to
a single relation (with mixture weights following the
original distribution).
Client Demand. We have perturbed the client de-
mand in two series of experiments. In the first, we
have multiplied the demand rate by a common con-
stant factor, thus scaling it in a time-independent way.
The results of this series are presented in Figure 4.
In the second series, we have fixed the total num-
ber of clients (i.e., the integral of the demand rate
function) and varied the slope of the demand rate: the
slope of 0 corresponds to the original demand rate,
the slope of −1 to there being no clients initially, but
the rate increasing linearly as the departure time ap-
proaches, and the slope of 1 to the rate being initially
maximal, but decreasing linearly to zero. The results
of this series are shown in Figure 5.
Figure 5: Robustness to client demand slope.
3.3 Discussion
As demonstrated by the experiments, our algorithm
is quite robust to imperfections in the input data. The
most important factor is the segmentation of the route,
which is not surprising, as it directly affects the num-
ber of clients we can serve at one time. However, this
is also the easiest factor to control: multiple segmen-
tations may be simulated in advance, and the best one
chosen for the actual operation—the only cost is the
size of the automaton (exponential in the number of
segments!), and consequently the time and storage re-
quired to compute the pricing strategy.
The second situation in which the algorithm per-
forms relatively poorly is when the actual demand is
significantly lower than predicted by the model. This
suggests that any method used for demand prediction
should be calibrated to prefer underestimating the de-
mand over overestimating it.
4 PERFORMANCE
The only reliable way to compare the business per-
formance of the proposed algorithm with other meth-
ods would be a real-world A/B test. In such a test,
it is, however, not enough to split individual clients
into two groups, and offer them different prices, be-
cause the methods might attempt to balance out offer-
ing higher prices with the risk of not filling the vehi-
cle. Therefore, each vehicle would need to be fully
controlled by one of the competing algorithms. The
test would therefore require a long running time for
the results to be statistically significant. This kind of
test is currently being prepared, but the results are not
yet available.
In the meantime, we have trained our dynamic al-
gorithm on historical data (the same used for the ro-
Dynamic Prices in Ride-Sharing Scenarios
441
bustness analysis), and performed a series of simula-
tions, in which we have compared its expected profits
with each of the following:
Actual Dynamic Pricing Strategy Used by Hoper.
We used historical data provided by Teroplan S.A.,
describing actual sales of Hoper tickets for over 800
rides along the evaluated route. Tickets were dynami-
cally priced using a proprietary, expert-given strategy,
incorporating time-to-departure, current vehicle occu-
pancy, and conflicts between “key relations”. Unfor-
tunately, the information only contained data about
clients who have found the prices acceptable. Based
on the assumed acceptance profiles and relation pop-
ularity, we have used maximum likelihood estimation
for the actual client counts.
A Locally Greedy Fixed-Price Strategy. For each
relation, we use its acceptance profile to determine a
price that maximizes the expected profit from a sin-
gle transaction. The strategy is completely blind to
potential future clients and vehicle occupancy.
An Optimal Fixed-Price Strategy. Here, we as-
sumed perfect knowledge about the actual number of
clients. With such knowledge, for each assignment of
fixed prices to individual relations, one can compute
the expected total profit according to the assumed ac-
ceptance profiles and relation popularity. We used nu-
merical optimization to find the best price assignment,
independently for each number of clients.
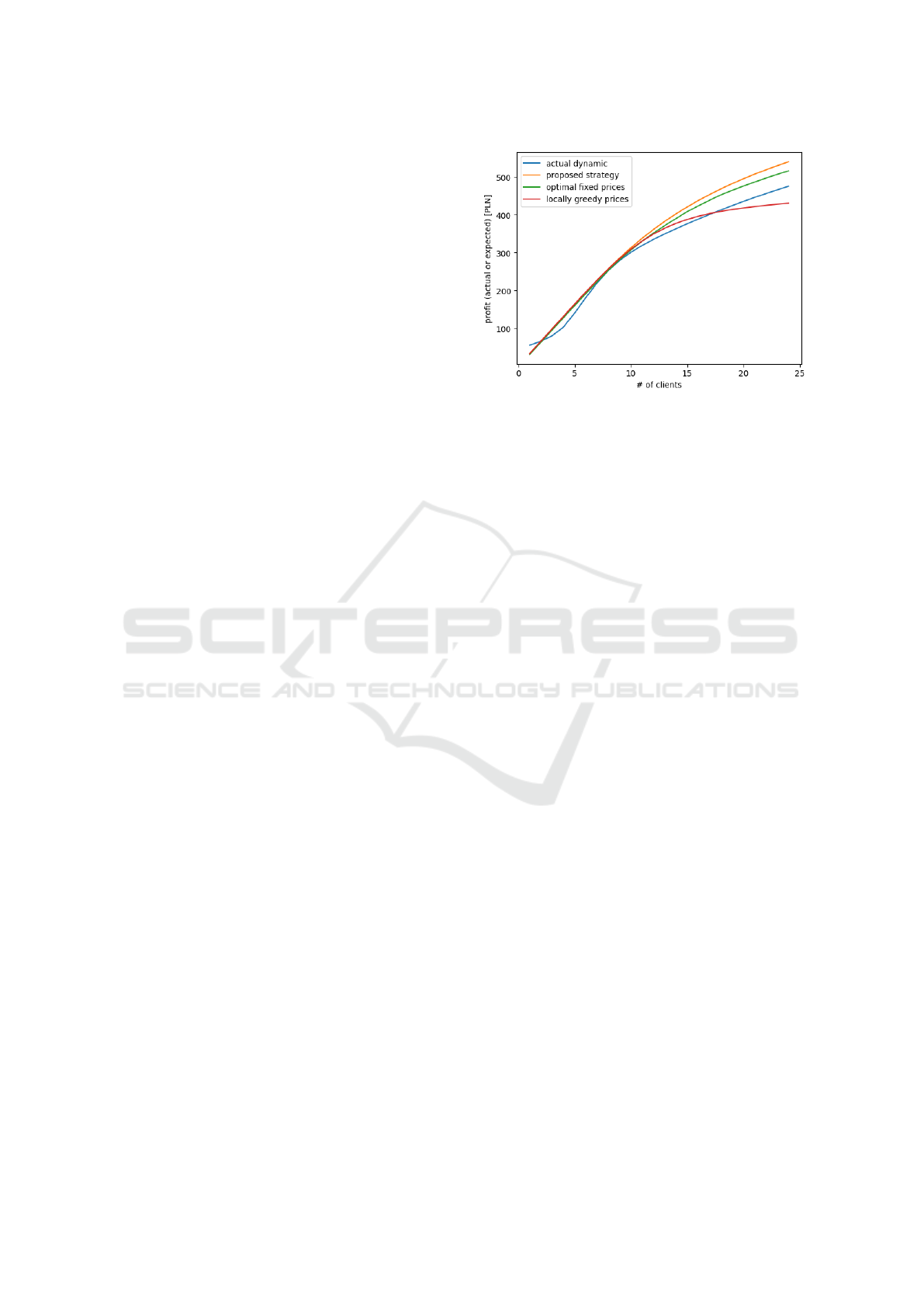
Results are compared in Figure 6. As long as the
number of clients does not exceed the capacity of the
vehicle, all evaluated strategies bring almost identical
profits (the slightly lower performance of the actual
strategy used by Hoper might be a statistical fluke, as
the company tried to rebook passengers from almost
empty vehicles to avoid unprofitable rides). Once the
demand is high enough to potentially fill the vehicle,
the profits of the locally optimal strategy quickly flat-
ten out. Other strategies continue to bring larger prof-
its, with our proposed data-driven dynamic method
hoping to offer about a 15% gain over the one pre-
scribed by business experts.
The above performance comparison is of course
strongly dependent on the input data: the same accep-
tance profiles and popularity distributions are used to
compute the dynamic strategy, to evaluate the prof-
its of all three hypothetical strategies, and to esti-
mate actual client counts in historical data. The far-
ther these inputs stray from actual client behavior, the
more skewed the estimations may be. However, as we
Figure 6: Profit comparison for different pricing strategies.
have demonstrated in the previous section, the pro-
posed method is quite robust to input imperfections.
In particular, save for the case of a severe overestima-
tion of the number of expected clients, the gains ex-
pected from our strategy are significantly greater than
the expected suboptimality due to imperfect inputs.
Thus, we believe it to offer a good chance of being
profitable in actual business settings.
5 CONCLUSIONS &
DIRECTIONS
We have presented here a dynamic pricing strategy
incorporating both the behavior of clients (like their
likelihood of accepting ticket prices for particular
connections) and the evolution of vehicle occupancy
in ride-sharing scenarios. While the strategy is de-
pendent on input data that might be challenging to es-
timate precisely, we have demonstrated that it is quite
robust to this input data being far from perfect—in
particular, we estimate our method to be profitable
even under such imperfections.
Using a finite automaton to describe the evolution
of vehicle occupancy is very generic. In fact, it can be
used to model multiple extensions useful from busi-
ness perspective, for example:
• the cost of operating the vehicle being dependent
on the portion of the route it has to travel,
• limits on, or additional costs related to, the num-
ber of stops on the route,
• the potential profitability of canceling the whole
ride (and reimbursing for tickets already sold).
We also pose the following problems for future re-
search:
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
442

Automatic Route Segmentation. It is clear that
good segmentation of the route is crucial for the per-
formance of our algorithm. However, due to the num-
ber of possible segmentations, it is not feasible to sim-
ulate the pricing strategy for all of them. Is there a
method for finding the best segmentation (exactly or
approximately) given an upper bound on the size of
the automaton?
Furthermore, the set of occupancy states does not
need to be a Cartesian product over “atomic” seg-
ments. Knowing the popularity of particular relations,
it should be possible to merge some of the states, thus
reducing the size of the automaton or allowing to use
a finer segmentation of the route.
Multiple or Larger Vehicles. Our simulations con-
sidered a single, 8-passenger vehicle. However, in
practice, it is often possible and profitable to operate
multiple vehicles in parallel. Modeling two vehicles
would be approximately the same as modeling a sin-
gle 16-passenger vehicle, however this approach does
not scale well due to the growth of the automaton size.
Client Density Tuning. It is not uncommon for the
demand rate for a particular day to differ significantly
from the average for the route due to some external
factors, which may cause our method to behave sub-
optimally. In principle, it should be possible to de-
tect such situations and adjust the expected rate dy-
namically, as the tickets are being sold—luckily, this
would not require a time-consuming recomputation of
the pricing strategy. A systematic study of this prob-
lem seems interesting.
Time-Dependent Popularity Distributions. In our
model, the relative popularity of relations is assumed
to be constant over time. However, when a route cov-
ers relations of different characteristics (e.g., long- vs.
short-distance, work- vs. leisure-related, etc.), tickets
for some of them might be systematically sought for
earlier than for others. Such an interdependence be-
tween the popularity distribution and client density
cannot be handled directly by the proposed method,
and hence requires further research.
REFERENCES
Augustin, K., Gerike, R., Martinez Sanchez, M. J., and Ay-
ala, C. (2014). Analysis of intercity bus markets on
long distances in an established and a young market:
The example of the U.S. and Germany. Research in
Transportation Economics, 48:245–254.
Cervero, R. (1990). Transit pricing research. Transporta-
tion, 17:117–139.
den Boer, A. V. (2015). Dynamic pricing and learning: His-
torical origins, current research, and new directions.
Surveys in Operations Research and Management Sci-
ence, 20(1):1–18.
DiMicco, J. M., Greenwald, A., and Maes, P. (2001). Dy-
namic pricing strategies under a finite time horizon. In
Proceedings of the 3rd ACM Conference on Electronic
Commerce, EC ’01, pages 95–104.
Eliasson, J. (2021). Efficient transport pricing–why, what,
and when? Communications in Transportation Re-
search, 1:100006.
Elmaghraby, W. and Keskinocak, P. (2003). Dynamic pric-
ing in the presence of inventory considerations: Re-
search overview, current practices, and future direc-
tions. Management Science, 49:1287–1309.
Fosgerau, M. and Van Dender, K. (2013). Road pricing with
complications. Transportation, 40:479–503.
Gallego, G. and van Ryzin, G. (1994). Optimal dynamic
pricing of inventories with stochastic demand over fi-
nite horizons. Management Science, 40(8):999–1020.
Geggero, A. A., Ogrzewalla, L., and Bubalo, B. (2019).
Pricing of the long-distance bus service in Europe:
The case of Flixbus. Economics of Transportation,
19:100120.
McGill, J. I. and van Ryzin, G. J. (1999). Revenue manage-
ment: Research overview and prospects. Transporta-
tion Science, 33:233–256.
Saharan, S., Bawa, S., and Kumar, N. (2020). Dynamic
pricing techniques for intelligent transportation sys-
tem in smart cities: A systematic review. Computer
Communications, 150:603–625.
Seele, P., Dierksmeier, C., Hofstetter, R., and Schultz, M. D.
(2021). Mapping the ethicality of algorithmic pricing:
A review of dynamic and personalized pricing. Jour-
nal of Business Ethics, 170:697–719.
Selc¸uk, A. M. and Avs¸ar, Z. M. (2019). Dynamic pricing in
airline revenue management. Journal of Mathematical
Analysis and Applications, 478(2):1191–1217.
Dynamic Prices in Ride-Sharing Scenarios
443
