
3D Virtual Fitting Network (3D VFN)
Danyal Mahmood, Wei Wen Leong, Humaira Nisar
a
and Ahmad Uzair bin Mazlan
Department of Electronic Engineering, Faculty of Engineering and Green Technology,
Universiti Tunku Abdul Rahman, Kampar 31900, Malaysia
Keywords: Virtual Try-On, Virtual Fitting Room, Deep Generative Models, Geometric Matching, Depth Estimation.
Abstract: With the rise in digital technology and the fast pace of life, as well as the change in lifestyle due to the
pandemic, people have started adopting online shopping in the garment industry as well. Hence, research on
Virtual Try-On (VTO) technologies to be implemented in virtual fitting rooms (VFRs) has drawn significant
attention. The existing VFR technologies rely on deep generative models with an end-to-end pipeline, from
feature extraction to garment warping and refinement. While currently there are 2D and 3D VTO solutions,
the 3D ones have enormous commercial potential in the fashion market as the technology has been proven
effective for providing a photo-realistic and detailed try-on result. However, the existing 3D VTO solutions
principally rely on annotated human body shapes or avatars, which are unrealistic. By integrating the
technologies embedded in both 2D and 3D VTO solutions, this paper proposes a VTO solution that relies on
geometric settings in the 3D space namely the 3D Virtual Fitting Network (3D VFN), that solely relies on 2D
RGB garment and single-person human images as inputs, generating a photo-realistic warped garment output
image by utilizing the geometric settings in the 3D space.
1 INTRODUCTION
The COVID-19 pandemic impacted 470 million
people worldwide by March 2022 in various aspects,
including social life and the economy. In the garment
industry, in March 2020, Bloomberg reported that
approximately 1,089 garment factories in Bangladesh
had faced orders worth $1.5 billion being scrapped
(Devnath, 2020). Also, the indefinite closure of
factories which leads to unacceptable salary cuts and
retrenchments is unavoidable. In response to the
pandemic, significant retailers in the United States,
such as H&M, Nike, Adidas, etc., greatly reduced
their operating hours or even announced their outlet
closures. In such scenarios, it is recommended to stay
home and do online shopping if possible. This has led
to a notable decline in physical shoppers, which in
turn increases the number of online shoppers. It can
be concluded that the pandemic has remarkably
transformed the human lifestyle as well as shopping
behavior. For retailers to stand out from other
competitors, the key is to provide a favorable
environment for e-shopping.
a
https://orcid.org/0000-0003-2026-5666
In addition to the pandemic, advanced technology
has also made, online shopping possible. According
to Statista, internationally, the total amount of goods
and services sold online has increased from US$1.3
trillion in 2014 to US$2.8 trillion in 2018. Up to 2021,
it has further increased to US$4.9 trillion, and the
forecast shows that it will grow by 50% in the coming
four years, to approximately US$7.4 trillion by 2025
(Chevalier, 2022). As such, Statista states that
globally as of 2018, the garment industry has
generated 57% of the total revenue in e-commerce,
with apparel as the most popular category (Chevalier,
2022). Specifically, the VFR plays a vital role in the
clothing and garment industry. It not only eases their
shopping experience from home with try-on virtually,
but it also provides retailers with an opportunity to
bridge the gap between online and offline shopping
experiences.
Following the trend, the VTO technology
embedded in the VFRs has drawn much attention.
Numerous research on the technology has been done
with uncountable networks introduced, whereby
almost all of them are of 2D image-based solutions,
that do not resort to any 3D information. Such
Mahmood, D., Leong, W., Nisar, H. and Mazlan, A.
3D Virtual Fitting Networ k (3D VFN).
DOI: 10.5220/0012726900003720
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 4th International Conference on Image Processing and Vision Engineering (IMPROVE 2024), pages 91-98
ISBN: 978-989-758-693-4; ISSN: 2795-4943
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
91

networks include the Virtual Try-On Network
(VITON) (Han et al., 2018), UVTON (Kubo et al.,
2019), etc., rely only on the Thin Plate Spline (TPS)
transformation (Bookstein, 1989) for garment
warping, which is known as inaccurate. Undeniably,
2D VTO solutions provide promising results
economically as they only involve the reformulation
of simple images. Whereas, the 3D VTO solutions
such as the Monocular-to-3D Virtual Try-On
Network M3D-VTON (Zhao et al., 2021), Clothing
Three-Dimensional Reconstruction for Hybrid
Image-Based Virtual Try-On (CloTH-VTON+)
(Minar & Ahn, 2020), 3D Multiple Pose Virtual Try-
On Network 3D-MPVTON (Tuan et al., 2021), are
costly to develop as they require high-specification
devices for data collection and 3D modeling
computations, and/or fancy cameras for physics
simulation to capture 3D information underneath, and
processing units or sensors for modeling and
rendering. Nevertheless, they provide promising fine
details in the output with 3D information underneath,
enhancing user experiences during garment try-on.
To address the limitations faced, the 3D VFN
aims to fit a garment image onto a single-person
image, synthetically, with photo-realistic details and
deformations well-preserved. This paper introduces a
new approach for 3D try-on for garments without
utilizing any high-end equipment, that wholly relies
on mathematical computation and image processing
tasks. With only a garment image and a single-person
image as inputs, the network reproduces the warped
garment image in 3D with texture, deformations, and
any other lifelike information preserved. The 3D
VFN is comprised of five stages, the Data Refinement
Stage (DRS), the Geometric Matching Stage (GMS),
the Depth Estimation and Refinement Stage (DERS),
the Try-On Fusion Stage (TFS), and lastly, the 3D
Point Cloud Modelling Stage (3D-PCMS). The main
contributions of the 3D VFN are:
• Achieved the garment try-on with semantic
information well-preserved.
• Achieved the human body reconstruction in 3D
space with only a 2D single-person image.
• Improved the geometric matching of try-on
quality in terms of alignment and layout
adaptation.
• Incorporated the image processing algorithms for
detecting the edge within an image based on the
image gradients and for alignment and geometric
characteristics purposes.
2 LITERATURE REVIEW
2.1 2D VTO Solution
2D VTO solutions solely rely on RGB images with
no involvement of 3D information. VITON (Han et
al., 2018) first generates a clothing-person agnostic
representation with extensive features. The network
is equipped with a multi-task encoder-decoder
generator to generate a course warped garment image
with the help of the clothing mask, and a trained
network to generate a final warped garment image
through composition and refinement processes. To
preserve the deformations and comprehensive visual
patterns, VITON (Han et al., 2018) implements TPS
transformation (Bookstein, 1989) with shape context
matching estimation. The standard limitation faced by
most VTO solutions is that they are only applicable
to images with human models in an upright position.
To overcome this, UVTON (Kubo et al., 2019)
implemented ultraviolet (UV) mapping for various
postures, ensuring high-quality transformation for the
geometric information. The texture mapping stream
utilizes UV mapping technology with two assistive
modules for painting and refinement. It implements
DensePose for the estimation and mapping of points
of human pixels in 2D RGB images to 3D human
module surfaces. The points are mapped to the
correlated points of the consumer following the UV
coordinate information found in the IUV, generating
a highly defined body part. High Fidelity Virtual Try-
On Network via Semantic Adaptation (VTON-HF)
(Du et al., 2021) proposed a Semantic Map-based
Image Adjustment Network (SMIAN) which
aggregates the component features and reconstructs
the component images through semantic mapping to
generate aggregated body components. To get rid of
the texture occlusion and confusion in the semantic
mapped result, the component synthesizer interlaces
the processed components with that obtained from
reference images earlier, to provide a result to be
further optimized by the SMIAN loss.
2.2 3D VTO Solution
3D VTO solutions are believed to be more effective
because of the 3D information. M3D-VTON (Zhao et
al., 2021) reconstructs a 3D try-on mesh by taking
only a garment image and a person image as inputs.
It proposes a self-adaptive pre-alignment to transform
the garment image to be deformed with the TPS
transformation, providing a clothing-agnostic person
representation and a double-depth map. The map is
refined with the help of the shadow information to
IMPROVE 2024 - 4th International Conference on Image Processing and Vision Engineering
92
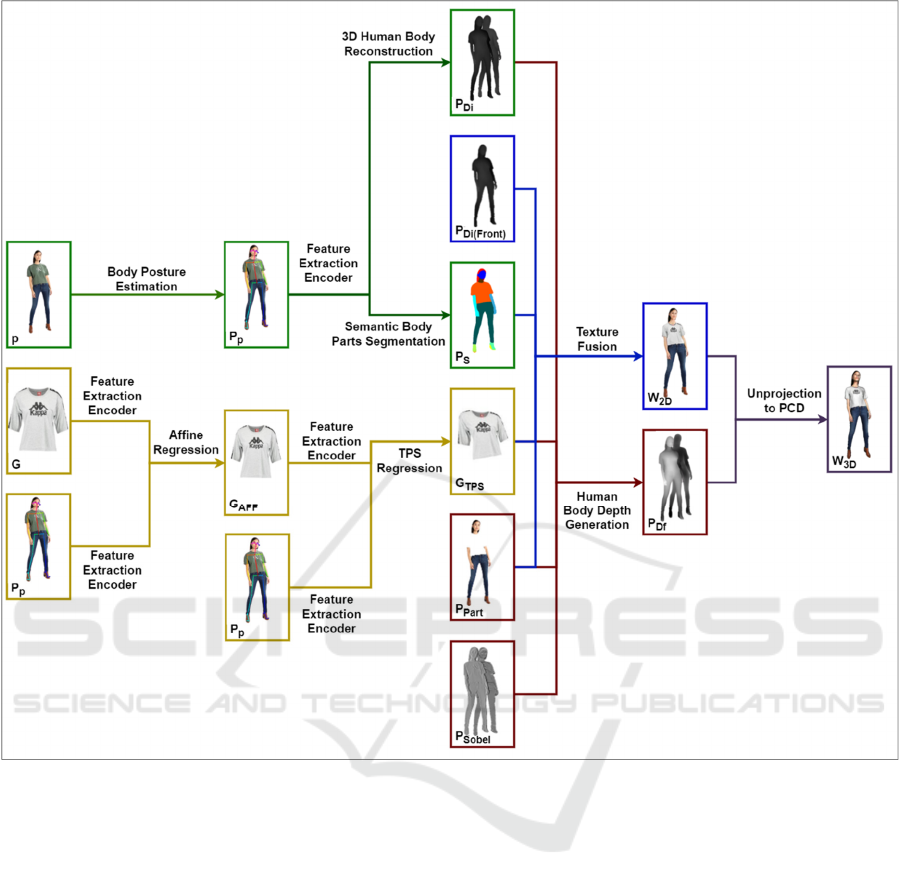
Figure 1: The overall framework of the proposed 3D VFN. The network comprises five stages (i.) Data Refinement Stage
(DRS) in green; (ii.) Geometric Matching Stage (GMS) in yellow; (iii.) Depth Estimation and Refinement Stage (DERS) in
orange; (iv.) Try-On Fusion Stage (TFS) in blue; (v.) 3D Point Cloud Modelling Stage (3D-PCMS) in brown.
generate a 2D try-on result. The refined 2D result is
then spatially aligned with the depth map to form a
RGB-Depth representation, that is furnished with
colour point clouds to be triangulated to generate
thefront mesh. While the back mesh implements the
fast-marching method (Telea, 2004). CloTH-VTON+
(Minar & Ahn, 2020), introduces a seamless
integration of image-based deep learning VTO
systems and 3D modelling for shaping deformation.
It offers an edge-to-edge fully automated pre-
programmed 2D clothing matching process. It utilizes
the SPML model as a reference for 2D matching and
applies TPS estimation to generate a 2D matched
result. The vertices of the matched result are
projected into 2D space for alignment, then again
projected into 3D space for 3D model reconstruction.
3D-MPVTON implements the 3D clothing
reconstruction approach offered in CloTH-VTON+
with try-on synthesis, providing far better results and
improved accuracy. In contrast, 3D-MPVTON offers
more focused approaches in each stage, giving better
outcomes with reduced artifacts.
3 METHODOLOGY
Figure 1 comprises five stages which are as follows:
• Data Refinement Stage (DRS) coloured in green.
This stage is responsible for refining input data
by performing body posture estimation, 3D
human body reconstruction, semantic body parts
segmentation, and filtering of images with the
Sobel Filter.
3D Virtual Fitting Network (3D VFN)
93
• Geometric Matching Stage (GMS) coloured in
yellow. This stage is responsible for the garment-
person alignment and texture mapping.
• Depth Estimation and Refinement Stage (DERS)
coloured in orange. This stage is responsible for
human body depth generation and refinement.
• Try-On Fusion Stage (TFS) coloured in blue.
This stage is responsible for garment warping to
generate a 2D try-on result.
• 3D Point Cloud Modelling Stage (3D-PCMS),
coloured in brown. This stage is responsible for
the unprojection of RGB-Depth representation of
the try-on result to 3D point cloud data and 3D
point cloud modeling.
3.1 Data Refinement Stage (DRS)
This stage shown in Figure 1, begins with body
posture estimation with OpenPose with the Body 25
model. OpenPose comprises a two-branch multi-
stage CNN architecture, which generates the output
in two forms: a 2D image pose map and JSON key
point coordinates. The pose map is then passed
through a feature encoder for 3D human body
reconstruction and semantic body parts segmentation
tasks. The 3D human body reconstruction adopts the
Multi-Level Pixel-Aligned Implicit Function (Saito et
al., 2020) that predicts the normal maps for both
frontside and backside of the human detected in the
image, then reconstructs the human body in 3D space.
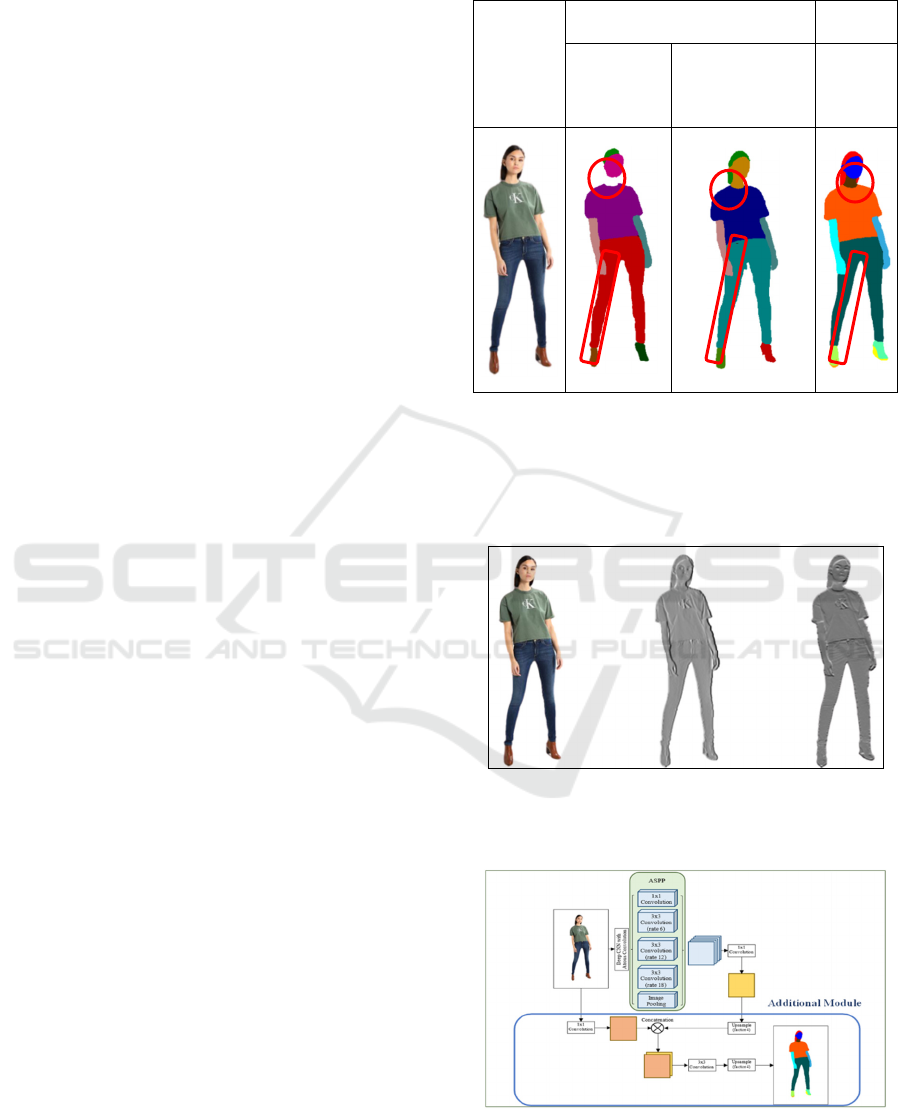
The semantic body parts segmentation proposes an
approach like DeepLabv3+ that shows a huge
improvement to DeepLabv2 which produces
inaccurate and noisy results. The proposed approach
implements the Atrous Spatial Pyramid Pooling
(ASPP) scheme and cascades an additional decoder
module. The proposed approach adapts the Xception
model (Chen et al., 2018) for its proven outstanding
performance and rapid computation as shown in
Table 1. Apart from that, it also incorporates the
Sobel algorithm on the single-person human image
for the edge detection process, generating the image
gradients Sobel X and Sobel Y, which are the first-
order derivatives of the image in the x- and y-
directions, respectively as shown in Figure 2. The
proposed model is trained on a custom dataset on
Google Colab with 50 epochs, 2,500 steps, and a
batch size of 2.
Figure 3 shows the proposed model architecture
for semantic body parts segmentation. The ASPP first
up samples the atrous convoluted features by a factor
of 4, while the decoder simultaneously performs a
1x1 convolution for the low-level features to reduce
its channels to prevent outweighing of important
Table 1: Segmented Body Maps with DeepLabv2, and with
the Enhanced LIP Dataset with the Proposed Approach.
Input
Single-
Person
Image
DeepLabv2 (Chen et al., 2018)
Proposed
A
pp
roach
Look into
Person (LIP)
(Liang et al.,
2018)
Active Template
Regression
(Liang et al.,
2015)
Enhanced
LIP
features, then both the convoluted features are
concatenated together. The concatenated features are
then passed through a 3x3 convolution to refine the
features. Lastly, the convoluted features are up-
sampled by a factor of four.
Figure 2: The Image Gradients, Sobel X (Middle) and Sobel
Y (Right) Generated with the 3D Human Body
Reconstruction by Implementing the Sobel Filter.
Figure 3: Proposed model architecture for semantic body
parts segmentation.
IMPROVE 2024 - 4th International Conference on Image Processing and Vision Engineering
94

3.2 Geometric Matching Stage (GMS)
Figure 1 first performs the affine transformation to
linearly map the garment image to the single-person
image for alignment in position- and size-wise
purposes:
G
Aff
K0
0K
G
11
G
12
G
21
G
22
x
A
P
PS
M
,
y
A
P
PS
M
-x
A
G
M
,
y
A
G
M
(1)
Whereby G
Aff
is the affine transformed garment.
The relationship indicates the scale factor of the size
of the garment image and the person image, such that
the garment image is ensured bigger than the person
image in size. The midpoints of the pose map and
garment image help align the garment image with the
pose map to fit the person's size. Subsequently, the
aligned affine transformed garment is passed through
the TPS transformation network with the person
image to obtain a TPS parameter to warp G
Aff
to the
warped garment, transferring the texture and
deformations as well. The GMS proposes an
improvement on the transfer of geometric details with
affine transformation for alignment before TPS
transformation, which differs from other VTO
solutions. The transformations are presented in
Figure 4 and Figure 5.
Figure 4: The Affine Warped Garment, G
Aff
, with Affine
Transformation.
Figure 5: The TPS Warped Garment, G
TPS
, with TPS
Transformation.
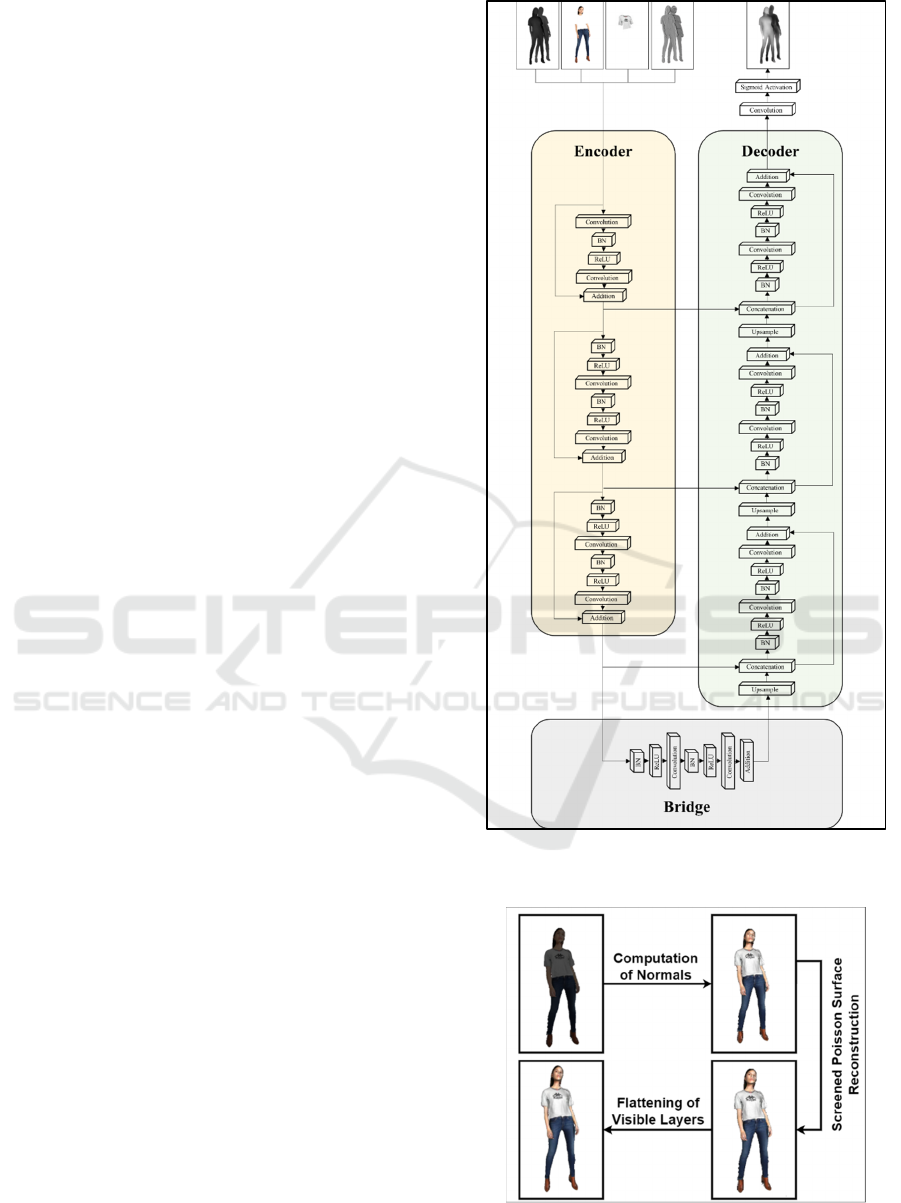
3.3 Depth Estimation and Refinement
Stage (DERS)
This stage is shown in Figure 1. M3D-VTON (Zhao
et al., 2021), introduces an architecture for depth
estimation and refinement tasks based on U-Net
(Ronneberger et al., 2015). However, it fails to
generate fine details, providing a relatively corrupted
outcome. As an improvement to M3D-VTON, in this
stage, we use the Deep Residual U-Net (Zhang et al.,
2018) which reorganizes the U-Net structure with
residual connections and an identity mapping path. It
comprises three stages: encoder, bridge, and decoder.
The stages are made up of residual connections built
by two 3x3 convolution blocks, in which each
comprises a convolutional layer, a Batch
Normalisation (BN) layer, a Rectified Linear Units
(ReLU) activation layer, and an identity mapping
path. the encoder first encodes the inputs into several
compact representations by applying a stride of two
to the first block for feature map halving, instead of
feature map down sampling with a pooling operation.
With the bridge that connects the encoder to the
decoder, the decoder then recovers the compact
representations and categorizes them pixel-wise. The
feature map is up-sampled within the decoder and
concatenated from the encoder before each residual
unit. Lastly, the multi-channel feature maps are
unprojected with a 1x1 convolutional block and a
sigmoid activation layer. The proposed architecture
combines the pros of U-Net (Ronneberger et al.,
2015) and residual neural network (Zhang et al.,
2018), giving a smoothened training process. It also
comprises skipped connections between high and low
levels of the network, which greatly facilitates
information propagation without degradation,
reducing the parameters needed. The proposed model
is presented in Figure 6. The training of the proposed
architecture is done on Google Colab, with 40 epochs,
1,500 steps, and a batch size of 3.
3.4 Try-On Fusion Stage (TFS)
To synthesize a realistic human body texture for 3D
human body mesh, this stage implements the Deep
Residual U-Net (Zhang et al., 2018) constructed in
the previous section to seamlessly merge the warped
garment and the single-person image. The synthesis
action generates a non-occluded 2D warped garment
image with 3D information underneath, that is
extracted from the spatial information of the human
body along the z-axis embedded in the front depth
map. This is shown in Figure 1.
3D Virtual Fitting Network (3D VFN)
95
The last stage introduced a try-on fusion network
for synthesizing a realistic human body texture. The
network architecture proposed for this stage, is
similar to that of the DERS, as illustrated in Figure 1.
The warped garment and the person image merge and
fuse for a seamless fitting. For obtaining the 2D
warped garment image, 𝑊
, the synthesis action is
guided by the front depth map, segmented body parts
map, and the preserved person-part map. On the other
hand, the synthesized output also comprises 3D
information, which will be unprojected in the next
stage. The 3D data is extracted from the spatial
information of the human body along with the z-axis
lying underneath the front depth map. With the
proposed network architecture, a precise try-on result
is achieved even for cases with occlusions.
3.5 3D Point Cloud Modelling Stage
(3D-PCMS)
The 3D point clouds are obtained by unprojecting the
double-depth maps with screened Poisson surface
reconstruction (Kazhdan & Hoppe, 2013) as shown in
Figure 7. The frontal mesh texture is coloured
according to the fitting result, while the back mesh is
inpainted with a fast-marching method (Telea, 2004)
by filling the backside of the head with a similar hair
colour, then mirroring the inpainted image back view
to the back mesh. Further image processing
procedures are implemented to generate a complete
3D human with a warped garment, which includes
computation of surface normals, screened Poisson,
and flattening of visible layers.
4 EXPERIMENTAL RESULTS
A pre-trained network from Zhao et al. (Zhao et al.,
2021) is adopted. The network is trained on a dataset
extracted from randomly extracting images from the
For evaluating the performance of the algorithm the
12 test sets are used as shown in Figure 8. The
platform used is Python 3.8.13 and PyTorch 1.6.0 for
developing, in an Anaconda environment, on
PyCharm Integrated Development Environment
(IDE).
Figure 6: The Deep Residual U-Net Architecture for the
DERS.
Figure 7: The Image Processing Algorithms Implemented
in the 3D-PCMS.
IMPROVE 2024 - 4th International Conference on Image Processing and Vision Engineering
96
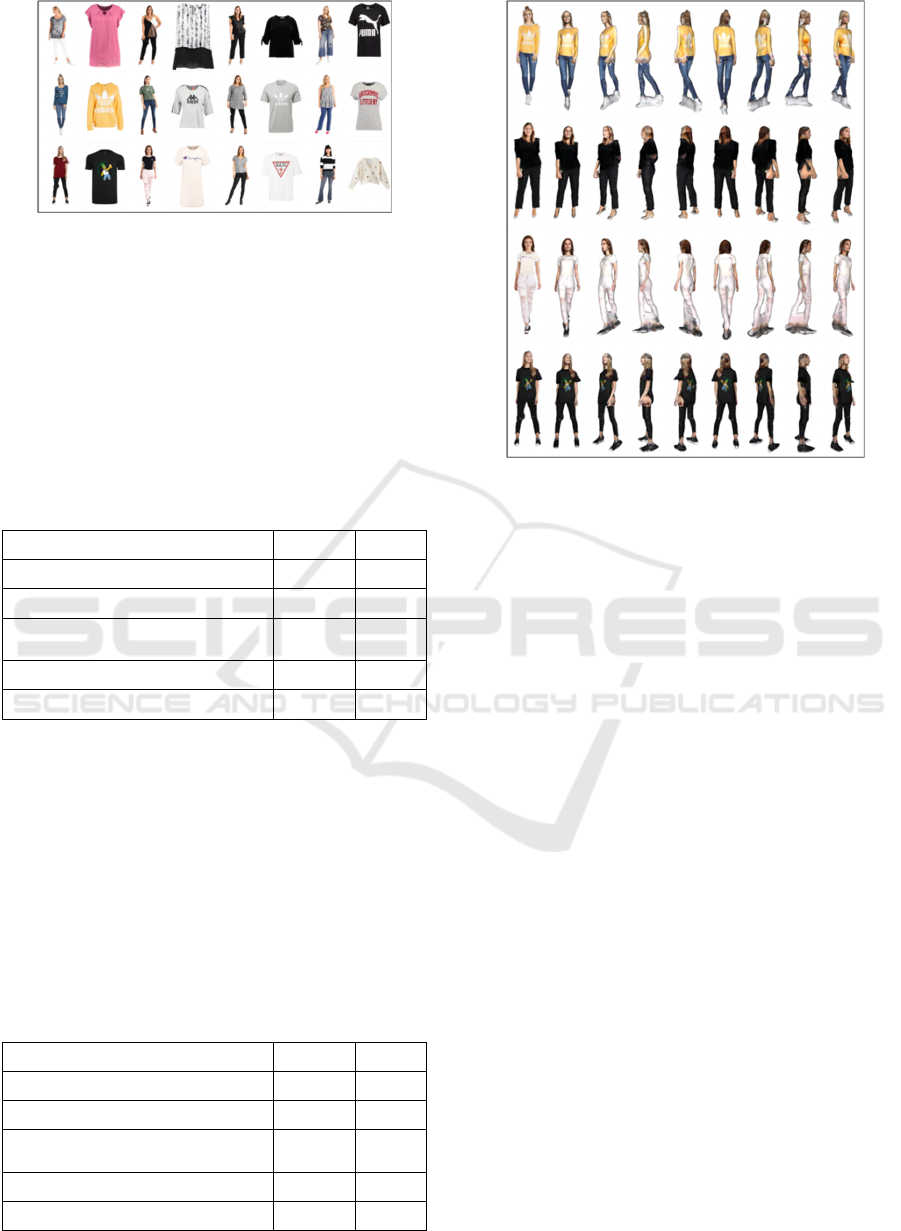
Figure 8: Test Sets (12 Sets, Each Set is Made Up of a
Single-Person Image and a Garment Image).
The results obtained show both good and
unsatisfying results. For performance evaluation, the
results are compared with several methods. As shown
in Table 2 and Table 3 by calculating the Structural
Similarity Index (SSIM) and Fréchet inception
distance (FID). The performance evaluations were
performed on both full-body and upper-body try-ons
independently.
Table 2: Performance evaluation for full-body try-on.
Network SSIM FID
VITON (Han et al., 2018) 0.8861 27.63
UVTON (Kubo et al., 2019) 0.8342 23.11
CloTH-VTON+ (Minar & Ahn,
2020
)
0.9012 19.25
3D-MPVTON (Tuan et al., 2021) 0.9134 19.87
3D VFN (Proposed Network) 0.9342 18.42
The quality evaluation for full-body try-on shows
that the proposed 3D VFN achieves the highest SSIM
of 0.9342, indicating the highest similarity
measurement between two images, and the lowest
FID of 18.42, indicating the lowest distance
measurement between the feature vectors within the
image. The quality evaluation for upper-body try-on,
on the other hand, shows that the proposed network
has the third-highest SSIM and second-lowest FID,
which also indicates a satisfying try-on quality with
room for improvement.
Table 3: Performance evaluation for upper-body try-on.
Network SSIM FID
VITON (Han et al., 2018) 0.8941 27.53
UVTON (Kubo et al., 2019) 0.8843 29.73
CloTH-VTON+ (Minar & Ahn,
2020
)
0.8887 27.45
3D-MPVTON (Tuan et al., 2021) 0.8736 27.89
3D VFN (Proposed Network) 0.8857 27.51
Figure 9: Examples of the Unsatisfying Cases of the
Proposed 3D VFN.
The proposed network also suffers from several
weaknesses as shown in Figure 9. Firstly, the network
fails to estimate the spatial gap along the z-direction
from 2D RGB images which raises distortions. In
addition, the fast-marching inpainting method
(TELEA) fails to recognize semantic parts to be
inpainted accordingly. The weaknesses are mainly
brought by the immaturity of the network trained due
to an under-defined dataset. Available datasets only
provide garment and single-person images in 2D
RGB, without any sideways and spatial information.
To achieve higher quality and performance for try-on
garments, the dataset for training should be fully
furnished with various annotations. Hence, to train
the network, the dataset shall comprise garment and
single-person images taken from all four directions
(front, back, left, and right). Collecting such a large
and diverse dataset is challenging as it involves
capturing numerous images from different
perspectives. Nevertheless, a more mature network
can be constructed with such a rich dataset.
5 CONCLUSIONS
This paper introduces a 3D VTO solution, the 3D
VFN, which reproduces the warped garment human
image in 3D space with photo-realistic information
preserved. The proposed network solely relies on 2D
RGB images with 24-bit depth and generates a 3D
warped garment as output. The network architecture
3D Virtual Fitting Network (3D VFN)
97

designed comprises of five stages, which are the Data
Refinement Stage (DRS), Geometric Matching Stage
(GMS), Depth Estimation and Refinement Stage
(DERS), Try-On Fusion Stage (TFS), and 3D Point
Cloud Modelling Stage (3D-PCMS), each carries
distinct yet significant role. In the architecture, in the
DRS, the network first takes in the 2D RGB garment
and single-person images as inputs and then refines
them into several representations. The GMS performs
the affine and TPS transformations for alignment and
geometric characteristics transfer purposes. The
DERS estimates the human body depth and refines it,
followed by the TFS for synthesis action to generate
the 2D warped garment human body image. Lastly,
the 3D-PCMS models and computes the 3D point
cloud of the 3D warped garment human body for
finalising it. For assessing the proposed network,
SSIM and FID were computed by testing the network
on several test sets and the results tabulated show
satisfying results and performance.
REFERENCES
Bookstein, F. L. (1989). Principal warps: Thin-plate splines
and the decomposition of deformations. IEEE
Transactions on pattern analysis and machine
intelligence, 11(6), 567-585.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., & Adam,
H. (2018). Encoder-decoder with atrous separable
convolution for semantic image segmentation.
Proceedings of the European conference on computer
vision (ECCV),
Chevalier, S. (2022). Global retail e-commerce sales 2014-
2025. Statista, Key Figures of E-Commerce.
Devnath, A. (2020). European retailers scrap $1.5 billion of
Bangladesh orders. The Guardian, 23.
Du, C., Yu, F., Chen, Y., Jiang, M., Wei, X., Peng, T., &
Hu, X. (2021). VTON-HF: High Fidelity Virtual Try-
on Network via Semantic Adaptation. 2021 IEEE 33rd
International Conference on Tools with Artificial
Intelligence (ICTAI),
Han, X., Wu, Z., Wu, Z., Yu, R., & Davis, L. S. (2018).
Viton: An image-based virtual try-on network.
Proceedings of the IEEE conference on computer vision
and pattern recognition,
Kazhdan, M., & Hoppe, H. (2013). Screened poisson
surface reconstruction. ACM Transactions on Graphics
(ToG), 32(3), 1-13.
Kubo, S., Iwasawa, Y., Suzuki, M., & Matsuo, Y. (2019).
Uvton: Uv mapping to consider the 3d structure of a
human in image-based virtual try-on network.
Proceedings of the IEEE/CVF International Conference
on Computer Vision Workshops,
Liang, X., Gong, K., Shen, X., & Lin, L. (2018). Look into
person: Joint body parsing & pose estimation network
and a new benchmark. IEEE transactions on pattern
analysis and machine intelligence, 41(4), 871-885.
Liang, X., Liu, S., Shen, X., Yang, J., Liu, L., Dong, J., Lin,
L., & Yan, S. (2015). Deep human parsing with active
template regression. IEEE transactions on pattern
analysis and machine intelligence, 37(12), 2402-2414.
Minar, M. R., & Ahn, H. (2020). Cloth-vton: Clothing
three-dimensional reconstruction for hybrid image-
based virtual try-on. Proceedings of the Asian
conference on computer vision,
Ronneberger, O., Fischer, P., & Brox, T. (2015). U-net:
Convolutional networks for biomedical image
segmentation. Medical Image Computing and
Computer-Assisted Intervention–MICCAI 2015: 18th
International Conference, Munich, Germany, October
5-9, 2015, Proceedings, Part III 18,
Saito, S., Simon, T., Saragih, J., & Joo, H. (2020). Pifuhd:
Multi-level pixel-aligned implicit function for high-
resolution 3d human digitization. Proceedings of the
IEEE/CVF Conference on Computer Vision and
Pattern Recognition,
Telea, A. (2004). An image inpainting technique based on
the fast marching method. Journal of graphics tools,
9(1), 23-34.
Tuan, T. T., Minar, M. R., Ahn, H., & Wainwright, J.
(2021). Multiple pose virtual try-on based on 3d
clothing reconstruction. IEEE Access, 9, 114367-
114380.
Zhang, Z., Liu, Q., & Wang, Y. (2018). Road extraction by
deep residual u-net.
IEEE Geoscience and Remote
Sensing Letters, 15(5), 749-753.
Zhao, F., Xie, Z., Kampffmeyer, M., Dong, H., Han, S.,
Zheng, T., Zhang, T., & Liang, X. (2021). M3d-vton: A
monocular-to-3d virtual try-on network. Proceedings of
the IEEE/CVF International Conference on Computer
Vision,
IMPROVE 2024 - 4th International Conference on Image Processing and Vision Engineering
98
