
Privacy Sensitive Building Monitoring Through Generative Sensors
Angan Mitra
a
, Denis Trystram
b
and Christopher Cerin
c
University of Grenoble Alpes, France
Keywords:
Smart Buildings, Sensor Combinatorial Optimization Problem in IoT, Ecological Sustainability,
Evolutionary Computing, Recommender Systems and Location-Awareness, Data Analytics.
Abstract:
A building equipped with sensors collects heterogeneous data, distributed naturally across zones. The lack
of spatiotemporal awareness can lead to excessive sensors or non-optimal distribution across a building. We
introduce a novel approach to reduce the friction between high smartness cost and ecological sustainability
by proposing virtual sensors as an artifact to estimate the environmental benefit for the planet of doing the
”same with less.” The key idea behind the contribution is to inject data from virtual sensors to determine if
an actual sensor can be replaced, followed by a sub-grouping of sensors. As a first contribution, our work
exploits the concept of ”less is more” to bring down the capital investment (CAPEX) and recurring expense
(OPEX) of the smart-building solutions. This fact opens the door to new research for an eco-responsible
deployment of sensors by revisiting the current approach of blind systematic deployment of sensors. We aim
to deploy the necessary amount (according to actual, simulated, or virtual uses) and not every room with all
possible sensors. As a second contribution, our experiments show a trade-off between virtualization accuracy
and active monitoring. Additionally, we validate our insights with 40-60% savings on sensor reduction for a
7-storied Thailand building.
1 INTRODUCTION
1.1 Context
The know-how of designing and making buildings
has seen tumultuous scales of updates, from huts to
skyscrapers. Before electricity advent, buildings were
conceived as a mere brick-and-mortar rendition of
habitable and workable spaces. When electrical ap-
pliances started populating households, the notion of
passive space turned into a controllable environment
using sensors and actuators. However, most of the ex-
isting buildings were already constructed before the
apparition of the Internet and the World Wide Web in
1990. This observation means building architectures
were not developed according to the sensors’ quantity,
type, and location.
Firstly, the popularity of Internet of Things (IoT)
devices led to ad-hoc dissemination in buildings,
where environments of dynamic parameters like tem-
perature, CO2, wind, etc., characterize buildings.
Such an approach can lead to a naive zonal distribu-
a
https://orcid.org/0000-0002-4581-808X
b
https://orcid.org/0000-0002-2623-6922
c
https://orcid.org/0000-0003-0993-9826
tion of sensors due to the obscurity of spatiotemporal
importance.
Secondly, a streaming IoT sensor can act as a data
source of sensitive patterns raising privacy concerns
among stakeholders.
Thirdly, the cost of equipping spaces with embed-
ded hardware over a large commercial area is non-
negligible and comes with recurring payments for
powering up the solution. In this work, we investigate
if there is a way to determine a minimalist sensing
solution for non-intrusive spatiotemporal coverage to
lower the capital cost and energy footprint of a smart
building solution.
In the realm of smart buildings, the convergence
of sensor combinatorial optimization problems within
the Internet of Things (IoT) landscape presents a sig-
nificant opportunity for advancing ecological sustain-
ability. Through the lens of evolutionary computing,
complex algorithms can be harnessed to optimize sen-
sor placement, maximizing efficiency while minimiz-
ing environmental impact.
This approach not only enhances the functionality
of IoT systems but also aligns with principles of eco-
logical responsibility. Leveraging recommender sys-
tems and location-awareness technology further re-
Mitra, A., Trystram, D. and Cerin, C.
Privacy Sensitive Building Monitoring Through Generative Sensors.
DOI: 10.5220/0012728100003705
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 9th International Conference on Internet of Things, Big Data and Security (IoTBDS 2024), pages 107-118
ISBN: 978-989-758-699-6; ISSN: 2184-4976
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
107

fines data collection processes, ensuring that insights
derived from data analytics are both relevant and ac-
tionable.
However, amidst these advancements, the
paramount concern remains privacy-sensitive build-
ing monitoring. By integrating generative sensors,
which prioritize data anonymization and encryption,
the integrity of individual privacy is preserved
without compromising the efficacy of smart building
operations. Thus, this holistic approach fosters
a symbiotic relationship between technological
innovation and ethical considerations, laying the
foundation for a sustainable and privacy-respecting
built environment.
1.2 Problem Statement and Outline of
Contributions
Given a temporal stream of data produced by IoT
sensors, we investigate the question of what subset
of sensors can be reliably powered off. We propose
a methodology for pre-integration and plan to place
sensors optimally within a building. The methodol-
ogy considers both virtual sensors (avatars) and non-
virtual sensors. The motivation for a virtual avatar
envelope over sensors in a building improves non-
intrusive sensing and reduces capital and operational
costs. The idea of an avatar to simulate a more ex-
tensive IoT infrastructure than the current one is one
of the main lines of our proposal. Since the markets
for smart buildings
1
and IoT
2
are overgrowing, it is
urgent to take into account as soon as possible, in
an eco-design approach, the need for a reasoned ap-
proach to the digitization of buildings.
In Section 2 we introduce the related works. In
Section 3 we propose a method to discover a logical
grouping of sensors at the edge and formulate encod-
ings to orchestrate a data-sharing policy. We solve
the underlying problem using a multi-objective opti-
mization algorithm to locate the edge network struc-
tures and identify distinct semantic collections. As
per experiments in Section 5, we empirically analyze
the policy evidence, discovery, and the lifelong mech-
anism of checking for optimal data-sharing topolo-
gies at the edge. Finally, summarizing in Section 6,
we argue that, for environmental issues, it is better to
pre-calculate the number of sensors and then buy and
deploy them rather than purchasing and deploying an
overestimation of the number of sensors.
1
https://www.fortunebusinessinsights.com/industry-
reports/smart-building-market-101198
2
https://iot-analytics.com/number-connected-iot-
devices/
2 RELATED WORK
Historically, buildings were not designed to cater to
forms of ambient intelligence, instead somewhat opti-
mized spatially for acceptable levels of thermal com-
fort, indoor ventilation, and privacy. Over time, the
building became a composite of observable and con-
trollable elements. In this section, we highlight the
limitations of the current situation in mastering the
placement of sensors, both at the technology level,
model level, and assumption level. Then we con-
duct a literature survey of the domain, such as sen-
sor approximation and optimal sensor placement. We
also introduce the machine learning and combinato-
rial optimization problem-solving concepts used in
our work.
2.1 Smart Building Technology
Acceptance
Smart applications (Wong et al., 2005) for buildings
have been developed mainly for monitoring, analysis,
and control of thermal units like Heating Ventilation
Air Conditioning (HVAC) units, illumination chan-
nels, etc. A 2019 review (Jia et al., 2019) of the smart
building industry states the major pain points towards
technological adaption. High installation costs, ob-
scurity on data storage policies, and privacy concerns
impede the acceptance (Hojjati and Khodakarami,
2016) of the Internet of Things in buildings. Typically
smart building applications thrive on real-time sensor
data for monitoring or actuation. Research shows that
analyzing sensor streams can reveal sensitive patterns
about occupancy (Garg and Bansal, 2000) or usage.
Consequently, privacy becomes a significant concern
for occupants in a building due to the non-zero pos-
sibility of a data leak. The cost of constructing (Ma
et al., 2017) a smart building is usually 1.2-1.8 times
a non-smart counterpart. This initial capital poses the
second barrier for a stakeholder (Xu et al., 2019) to
overcome before system installation. But before a
technical deployment (Ma et al., 2016), the smart so-
lution needs to go through a pre-evaluation stage be-
fore finalizing the bill of materials.
2.2 Edge Learning for Smart Buildings
The incorporation of the Internet of Things (IoT) has
shaped machine learning-driven outcomes for predic-
tive maintenance, anomaly detection, resource opti-
mization, and much more. Sustainability goals have
put the spotlight on optimization possibilities for ex-
ploring frugality in the training of models (Gong
et al., 2021), inference on physical devices, etc.
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
108

The vision to enable battery-less computing (Nirjon,
2018) for platforms is shown to be capable of run-
ning predefined machine learning tasks via intermit-
tent learning. Usually in the domain of IoT, the data
is on the move either between the cluster of devices
or to and fro from remote servers. Long-distance in-
formation propagation is energy-intensive for which
edge computing is growing to be a sustainable com-
puting partner for IoT.
Algorithmic developments and localized data han-
dling techniques at edge (Medeiros and Fernandes,
2020) to develop distributed learning models align
with a system-oriented approach (Thrun, 1995) to-
wards machine learning where one focuses on knowl-
edge representation and inferring meaningful infor-
mation against a stream of productive tasks (Chen and
Liu, 2016). Notably for buildings, the generated data
contains sensitive information regarding activity pat-
terns and this makes data sharing difficult. This opens
the scope for federated learning (Mitra et al., 2021) or
decentralized techniques (Mitra et al., 2022) to pro-
mote building intelligence by strictly adhering to in-
house data policy. This line of work provides critical
insight into the role of communication topology and
utilization on a real-life smart building data set.
2.3 Sensor Allocation Problem
Multiple cyber-physical systems like sensors and ac-
tuators work in cohesion to maintain the desired qual-
ity of ambiance and indoor comfort of a building.
Some examples of non-intrusive ambient sensors are
temperature, humidity, and luminosity. Data val-
ues recorded by a type of sensor are usually dissim-
ilar across different buildings or separate zones in
a building. Empirical Mode Decomposition (EMD)
(Fontugne et al., 2012) of a continuous variable such
as temperature, humidity, or luminosity yields Intrin-
sic Mode Functions (IMF)(Ayenu-Prah and Attoh-
Okine, 2010). This model has been helpful for struc-
tural health monitoring (Barbosh et al., 2020) for
buildings. K means clustering over the space of IMF
for all the sensors is shown to be effective (Hong et al.,
2013) in identifying non-identical sensors. This ap-
proach is further extended (Yoganathan et al., 2018)
by using information loss to eliminate weak candidate
points from a cluster to obtain a sensor placement so-
lution.
Generally, choosing the globally optimal place-
ment within the search space of a large-scale com-
plex system is an intractable computation, in which
the number of possible placements grows combinato-
rially with the number of candidates (Ko et al., 1995).
Py-Sensors (de Silva et al., 2021) is a software pack-
age published in 2021 that includes state-of-the-art
algorithms on scalable optimization of sensor place-
ment from data. It is to be noted that the basis on
which one represents measurement data can have a
pronounced effect (Manohar et al., 2018) on the sen-
sors that are selected and the quality of the reconstruc-
tion. The task of classifying sites for sensor place-
ment for benchmarking is the Sparse Sensor Place-
ment Optimization for Classification (SSPOC) algo-
rithm (Brunton et al., 2013). The algorithm is related
to compressed sensing optimization (Emmanuel et al.,
2005) but identifies the sparsest set of sensors that
reconstructs a discriminating plane in a feature sub-
space. Regarding reconstruction problems, the pack-
age implements methods for efficiently analyzing the
effects that data or sensor quantity have on recon-
struction performance (Manohar et al., 2018). Of-
ten different sensor locations impose variable costs,
which are taken into account during sensor selec-
tion via a built-in cost-sensitive optimization routine
(Clark et al., 2018). Above mentioned methods are
neither incremental nor self-aware to attempt correc-
tive measures. Hence it is obscure how they will de-
tect changes in building patterns and correspondingly
adjust the sensor allocation/placements.
3 PROBLEM MODELING
The question ”How many are too few or too many
sensors” is often an undermined topic when installing
sensors in a building or multiple spaces. The work ad-
dresses data privacy for smart buildings and proposes
in-house data circulation as a backbone to power off
redundant sensors. In this context, we introduce the
Virtual Sensor Field, a mixed basket of physical and
computable sensors that creates a virtual avatar over a
set of sensors distributed over multiple spaces.
Figure 1 represents a high-level overview of the
virtual field. The principal idea is grouping the set of
sensors the formulation is twofold:
1. Learn a methodology to partition the sensor set
S and provide insight on which sensors are most
likely to stay active or be replaced by virtual coun-
terparts.
2. Figure out how grouping sensors can leverage
data proximity at the edge, following a strictly in-
house data retention policy.
Assume that the notation n
X
means the number
of elements in set X. So in a building let there be n
S
sensors of n
K
types distributed over n
F
floors. Let
G be a collection of n
G
groups/sets, where for each
group g, active and virtual sensors are denoted by A
g
Privacy Sensitive Building Monitoring Through Generative Sensors
109

SENSOR
LOCATION MAP
ACTIVE SENSORS
VIRTUAL
SENSORS
HYPOTHESIS
SPACE
DRIFT AWARENESS (O
3
)
LEARN DATA CIRCULATION PROTOCOL (O
4
)
VIRTUAL TO REALITY
TRANSFORMATION (O
2
)
VIRTUAL FIELD
OPTIMIZATION
PATHWAY S
REALITY TO VIRTUAL
TRANSFORMATION (O
1
)
Figure 1: Schematic of Virtual Sensor Field with optimiza-
tion pathways.
and V
g
respectively.
S
|{z}
All Sensors
=
g=n
G
[
g=1
S
g
|{z}
Sensors in group g
(1)
S
g
|{z}
Group g Sensors
= A
g
|{z}
Active Sensors
∪ V
g
|{z}
Virtual Sensors
(2)
Now we break down the virtualization process
into three steps as follows:
• Reconstruction of hidden sensor data from real
or virtual deployed sensors. (Section 3.1)
• Classifying sensors as real or virtual and fixing
where the sensors are to be placed. (Section 3.2)
• Re-calibration of virtual sensor field with an in-
cremental data feed from real sensors. (Section
3.3)
3.1 Regressing Signal Reconstruction
The signal reconstruction mechanism reconstructs
virtual sensor data from actual sensors and vice versa
by creating a set of machine-learned regressors. Since
this mechanism works for every group before opti-
mization, one faces the cold start problem where the
optimal group size is unknown. Most importantly,
we bring to the reader’s attention that the classifica-
tion for real and virtual sensors is a priori not known.
To resolve the issue, the system creates the following
seed groupings:
1. Bucketing sensors by the same type, thus ending
up with n
K
groups.
2. Grouping sensors by space or same floor, there-
fore creating n
F
groups.
Now for all of the cold start groups, the system
learns all possible pairwise regressors between sen-
sors. For example, in the case of spatial grouping,
the stream of a CO
2
type sensor can be reconstructed
using a luminous intensity sensor placed within the
same floor. Likewise, for a type-wise grouping, a tem-
perature sensor placed in the 2
nd
floor can be approx-
imated using a similar type of candidate sensor from
the top floor. Thus, the learning complexity for n
G
logical groups is O(n
G
W
2
) models, where W is the
maximum group size.
The bidirectional transformation function be-
tween {A
g
, V
g
} is learned through per group hypoth-
esis space H
g
defined by Equation 3.
H
g
=
H
g
f
: A
g
→ V
g
H
g
b
: V
g
→ A
g
(3)
H
g
f
refers to forward feature space that translates
from reality to the virtual world, while the subscript b
in H
g
b
denotes the reverse backward mapping between
hidden sensors and real-life deployment. The quality
of H
g
is evaluated through a cost function L (such as
Root Mean Square, L2, L1 norms) executed over all
possible pair-wise interaction pairs (u, v) ∀u ∈ S, v ∈
S, u ̸= v. The error in predicting channel v using a
sensor u is recorded at the [u, v]
th
index of an error
matrix E
g
as per Equation 4.
E
g
[u, v] = L(v, H
g
[u, v]
| {z }
ML model
(u)) (4)
Note that E
g
[u, v] ̸= E
g
[v, u] implies that the two
losses generated by swapping the dependent and in-
dependent variables may not be equal.
To estimate the sensor value y
v
of a channel v ∈
V
g
, we first select the optimal channel (u
∗
) to predict
by using the [u
∗
, v]
th
entry of hypothesis library H
g
f
as
per Equation 5.
u
∗
← arg min
g∈G
E
g
[u, v]
y
v
= H
g
f
[u
∗
, v](u
∗
)
(5)
This technique bounds the maximum observable
error since another optimal mapping H
∗
can exist us-
ing more than one feature for prediction.
3.2 Classifying Sensor Placement
Next, we introduce grouping sensors for answering:
How can we leverage intra-zone patterns to optimize
data flows between sensors for virtualization? The
solution to such problems is typically a set of ’non-
dominated’ solutions where an objective can not be
improved without decreasing the other objectives. We
define the first two objectives to measure the predic-
tion error due to forward H
g
f
and backward H
g
b
hy-
pothesis, respectively. For both equations 6 and 7,
symbols u and v shall stand for real and virtual sen-
sors, respectively.
O
1
(G)
| {z }
Virtual loss
= Σ
g∈G,u∈A
g
,v∈V
g
E
g
[u, v] (6)
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
110

O
2
(G)
| {z }
Inv Virtual loss
= Σ
g∈G,u∈A
g
,v∈V
g
E
g
[v, u] (7)
3.3 Re-Calibrating with Episodic Data
The system experimentally investigates the quality of
the sensor configuration to power up the virtual sensor
field optimally. Once optimal configurations are de-
ployed, valid sensor data at certain zones are missing.
Over time, predictions may lead to blind spots where
the ground truth may vastly deviate, or installing sen-
sors can become necessary.
Thus the affinity grouping A
g
, V
g
can be re-
calibrated with the availability of additional data, but
such a process must consider the historical perfor-
mance. For any t ∈ T , reconstruction loss at sensor
position i is the absolute difference between the ac-
tual (y
i
) and predicted value ˆy
i
of a sensor for a virtual
mask is given as per Equation 8.
O
3
(G,t
s
,t
e
)
| {z }
Reconstuction Feed
=
Σ
t∈[t
s
:t
e
]
Σ
i∈S
|t
e
−t
s
|n
S
|y
i
(t) − ˆy
i
(t)|
ˆy
i
(t) ∈
(
H
g
f
(A
g
) i f s
i
∈ A
g
H
g
b
H
g
f
(A
g
)) i f s
i
∈ V
g
(8)
3.4 Data Network Sparsity
The policymaker additionally models the network
topology of sensors to minimize the number of data-
sharing links. Let every node i have e
I
i
number of in-
coming edges and e
O
i
outgoing connections. Equation
9 gives O
4
defined as the ratio between the number of
edges in M to the total edges in a complete graph. In a
spectral space spanned by n
G
entries, the representa-
tion for any sensor u is given by α
u
∈ R
n
G
and the net
non-randomness(O
4
) of the underlying connectivity
network is simply the sum of all possible pairwise dot
product between nodes.
O
4
(S)
|{z}
Networking Volume
= Σ
i∈S
e
I
i
e
O
i
+ e
I
i
(9)
The non-randomness of an edge tends to be small
when the two nodes linked by that edge are from
two different communities. The quality of the Vir-
tual Sensor Field is further tracked through a relative
measure that indicates to what extent the data shar-
ing/connectivity graph differs from random graphs in
terms of probability.
When O
4
is close to 0, the graph tends to be more
likely generated by an Erdos Renyi model.
4 SENSOR FIELD
VIRTUALIZATION SOLVER
We now present the solver that combines all 4 objec-
tives as formulated above, under Section 3 to optimize
the sensor placement incrementally. Each placement
strategy is encoded as a vector of numbers, and such a
vector shall be referred to as a policy. A policy assigns
a group number and a 0/1 tag indicating every sen-
sor’s virtual or physical presence. For example, if a
sensor belongs to group i, and has a virtualization tag
j ∈ {0, 1}, then the encoding is given as 2 × i + j. The
search space for all possible placements of n
S
sensors
is exponential in the order of 2
n
S
.
4.1 Policy Building Routine
Let P be a set of policies modeling non-identical sen-
sor placement configurations. How to cherry-pick ro-
bust positions and create partial ordering amongst
multiple strategies? Algorithm 1 creates an or-
dered front (φ) of positioning strategies which ac-
celerates decision-making. It uses non-dominated
sorting to obtain solutions superior to other config-
urations. This enables incrementally adding sensors
Pareto-optimally while keeping track of the number
of solutions inferior to a policy within the pool. The
candidate solutions with maximal superiority are in-
cluded in the first front/batch to build up the sensor
blanket bottom-up.
4.2 Policy Exploration Routine
How to ascertain if there is a relative advantage in
switching from one configuration to another? The an-
swer is a Gain Matrix (GN) of size M × N with M
policies and N objectives. The core intuition behind
Algorithm 2 is the density of solutions within a pol-
icy’s neighborhood. The policy pool is sorted for ev-
ery objective in ascending order, and the correspond-
ing objective weight initializes the starting objective
value for each sensor configuration. Each element of
Gain Matrix GN is updated with the differential mar-
gin of the objective scores between the policies at the
i − 1 and i + 1 index. Note that if all the objectives’
values are co-linear, the gain term is 0.
Policy Explorer spans the configuration space
through two well studied genetic operators (Um-
barkar and Sheth, 2015). Mutation operates per group
and randomly toggles a sensor from the active group
(A
g
) to the virtual group (V
g
) and vice-versa. The
second operator, the Random Crossover, is performed
amongst two randomly chosen affinity groups within
a policy mask.
Privacy Sensitive Building Monitoring Through Generative Sensors
111

Algorithm 1: Sensor Front Builder.
Input: Policy set P
Output: Ordered Sensor Front φ
1: for every policy p ∈ P do
2: for every policy q ∈ P do
3: if p ≻ q then
4: S
p
← S
p
∪ {q} { ▷ absorb policy q since
every objective in q is better than p }
5: else if q ≻ p then
6: n
p
= n
p
+1 { ▷ Count how many solutions
are superior in S to q. }
7: end if
8: end for
9: if n
p
=0 then
10: φ
1
= φ
1
∪ {p} { ▷ Select only non-
dominating solutions as the first front. }
11: end if
12: end for
13: i= 1
14: while φ
i
̸= 0 do
15: C = φ { ▷ For every front, incrementally add
sensors starting from zero.}
16: for each p ∈ φ
i
do
17: for each q in S
p
do
18: n
q
= n
q
− 1
19: if n
q
= 0 then
20: C = C ∪ {q} { ▷ Add non-dominant
sensors to a placement configuration}
21: end if
22: i = i + 1; φ
i
= C
23: end for
24: end for
25: end while
Algorithm 2: Differential Gain Estimator.
Input: Policy pool P of size M,
N objective functions
Output: Gain Matrix GN of size M × N
1: for every objective j ∈ 1 to N do
2: GN
j
[p] = O
j
(p)∀p ∈ P. { ▷ Number of entries
in GN
j
= M}
3: GN
j
[0] = GN
j
[M] = 0
4: for i = 2 to M − 1 do
5: GN
j
[i]+ = (GN
j
[i − 1] − GN
j
[i + 1])
6: end for
7: end for
4.3 Policy Optimizer Routine
In Algorithm 3 NSGA II (Deb et al., 2002) is mod-
ified to search the configuration vector space, with
time complexity of O(2
n
S
), to optimize our objectives,
Algorithm 3: Policy Optimizer.
Input: Initial policy pool P
t=0
of size M
N objective functions,
Iteration Limit T
max
Output: M best policies
1: Initialize t ← 0, Q
t=0
= φ
2: while t ≤ T
max
do
3: R
t
← P
t
∪ Q
t
4: φ = Sensor Front Builder(R
t
)
5: i ← 0 {▷ Incrementally add configurations}
6: while i < |φ| do
7: P
t+1
= P
t
∪ φ
i
8: GN ← Differential Gain Estimator(φ
i
)
9: Sort(P
t+1
) based on GN
10: P
t+1
= P
t+1
[1 : M] {▷ Get top M policies}
11: i ← i + 1
12: end while
13: Q
t+1
= Policy Explorer(P
t+1
)
14: t ← t + 1
15: end while
and as follows:
1. Take as input the learned hypothesis space and er-
ror matrix {H
g
, E
g
}∀g ∈ G.
2. Initialize a fixed-sized sample pool (P
t
) of policies
as a random string of 0’s and 1’s.
3. For every policy, evaluate the objective set
[O
1
, O
2
, O
3
, O
4
].
4. If the maximum number of generations is reached
or incremental gain is lower than a threshold, the
algorithm stops; else, a child population Q
t
is cre-
ated using steps 5, 6, and 7.
5. Policy sorting is used to incrementally identify
Pareto optimal solutions till the entire population
is exhausted.
6. Policy Gain Estimator is used to check the density
around individual solutions to prevent the algo-
rithm from terminating in a local optimum. Poli-
cies within the rectangular field spanned by the
nearest adjacent solutions are discarded.
7. Alteration in the encoding is achieved through ge-
netic operators: Random Crossover (Umbarkar
and Sheth, 2015) implemented as the policy sam-
pler.
8. Finally populations P
t
and Q
t
are combined to
generate the parent population at time t + 1 using
steps 5 and 6 in order.
9. Go back to Step 3 and iterate with the generation
count decreased by 1.
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
112

5 EXPERIMENTS
5.1 Data Set, Settings and Experimental
Plan
We consider the dataset from (Pipattanasomporn
et al., 2020) for the experiments. It comes from a
seven-floor building in Thailand, including 24 smart
zones with 1.5 years of data collected at a 1-minute
resolution. The analysis highlights three key decom-
position steps to build up a Virtual Sensor Field:
• Evidence Investigation of error matrices ({E
g
})
to judge the quality of virtualization accuracy as
per sub-section 5.2.
• Policy Encoding (M) for generating a virtual sen-
sor field according to sub-section 5.3.
• Policy Re-calibration to incrementally build up a
policy from the bottom up by optimizing the hy-
pothesis space as given in sub-section 5.4.
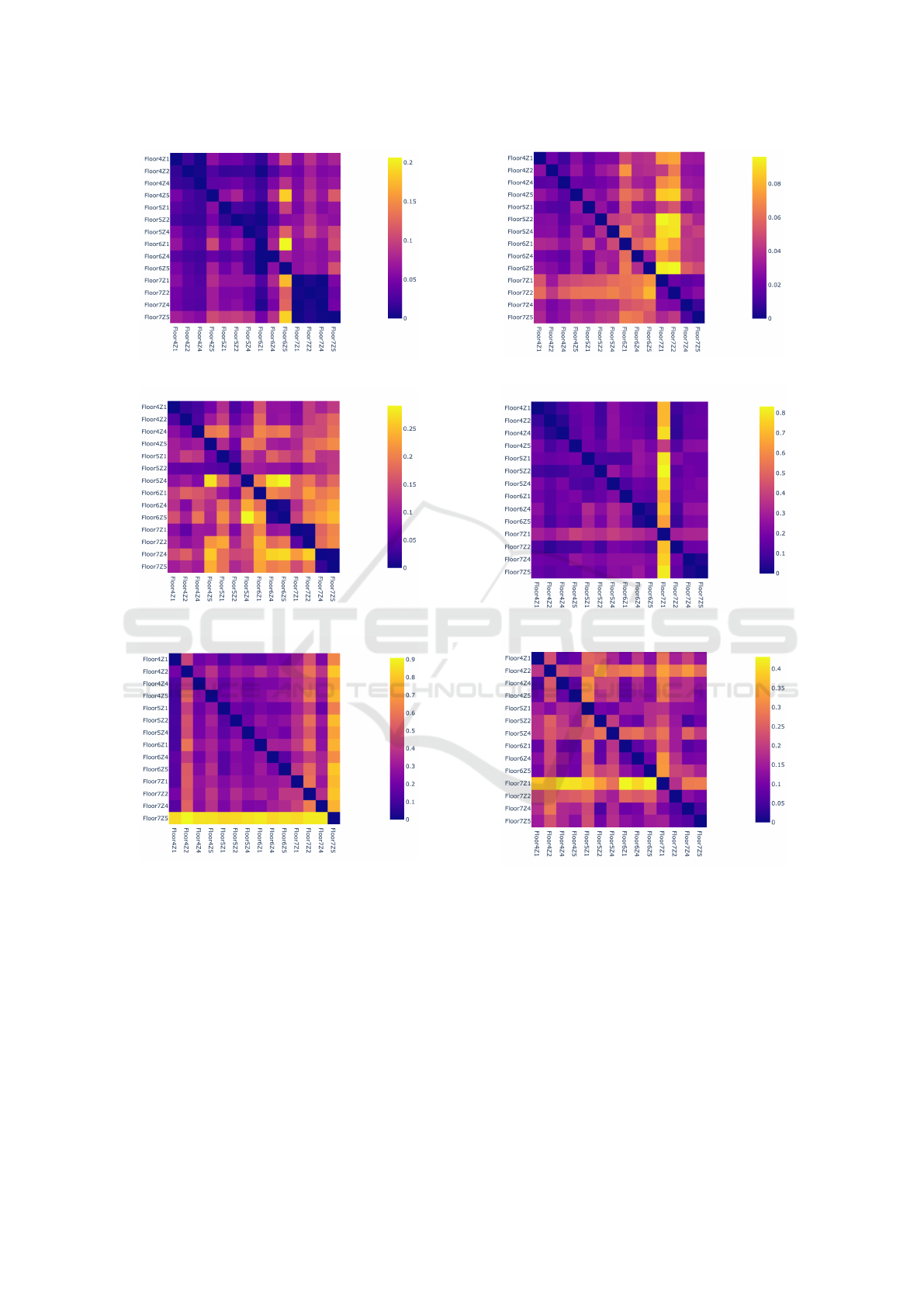
5.2 Evidence Investigation
Table 1: Error Matrix with Spatial Grouping when predict-
ing a sensor of type t and floor f, all the sensors from f are
used for forecasting.
Zone Power Ambience
AC Light App Temp RH Lux
FL-2Z1 0.15 0.14 0.13 0.18 0.53 0.15
FL-2Z2 0.08 0.07 0.15 0.11 0.36 0.06
FL-2Z4 0.33 0.31 0.73 0.33 0.66 0.31
FL-3Z1 0.32 0.23 0.38 0.24 0.45 0.26
FL-3Z2 0.35 0.25 0.27 0.29 0.4 0.27
FL-3Z4 0.34 0.23 0.25 0.22 0.61 0.22
FL-3Z5 0.42 0.25 0.27 0.28 0.63 0.24
FL-4Z1 0.28 0.24 0.19 0.2 0.53 0.26
FL-4Z2 0.34 0.27 0.48 0.25 0.59 0.25
FL-4Z4 0.28 0.25 0.29 0.24 0.53 0.24
FL-4Z5 0.36 0.18 0.35 0.23 0.46 0.17
FL-5Z1 0.23 0.2 0.19 0.15 0.45 0.22
FL-5Z2 0.29 0.19 0.28 0.19 0.35 0.19
FL-5Z4 0.33 0.36 0.31 0.3 0.58 0.3
FL-5Z5 0.43 0.26 0.29 0.31 0.64 0.26
FL-6Z1 0.26 0.23 0.25 0.29 0.37 0.22
FL-6Z2 0.36 0.28 0.22 0.28 0.38 0.3
FL-6Z4 0.26 0.17 0.27 0.22 0.41 0.21
FL-6Z5 0.47 0.22 0.26 0.23 0.58 0.23
FL-7Z1 0.34 0.28 0.43 0.31 0.65 0.48
FL-7Z2 0.31 0.3 0.59 0.33 0.61 0.23
FL-7Z4 0.28 0.21 0.28 0.23 0.41 0.2
FL-7Z5 0.44 0.38 0.71 0.34 0.61 0.36
What is the trade-off in terms of accuracy between
keeping a sensor powered on and alternately switched
off within a group g? Once a grouping strategy is
fixed, the system trains a forecasting model between
two sensor channels (u,v) for every sensor map group
(A
g
, V
g
). n
G
disjoint groups enable computing the
hypothesis space H
g
and the error matrix table in par-
allel. For every prediction task between u, v, the com-
puted center generates an error matrix for each model,
for example, linear regression, random forest, and
XGBoost. The training step ingests 90 days of sen-
sor data feed from every type of sensor in each place.
The evidence described corresponds to one month per
season train feed picking three months from each of
the:
• Summer (March - June). Hottest time of the year
with an average low of 25 degrees to an average
high of 35 degrees.
• Rainy Season (July – October). Average mini-
mum 24 degrees and average high 32 degrees.
• Winter (November – February). Average mini-
mum 20 degrees and average high 29 degrees.
Tables 1 reflect the maximum error recorded with
space-wise grouping, respectively. For every chan-
nel, the minimum and the maximum training errors
are presented as a tuple. Power consumption patterns
are best learned from a similar category of sensors
(min = 0.03, max = 0.27, grouping = type) rather than
combining data from multiple heterogeneous sensors
in the same place (min = 0.2, max = 0.71, grouping
= space). This observation is consistent for predicting
light, AC, and appliance power consumption levels as
seen from Figure 2.
Luminosity (lux) levels have the best type-wise
grouping approximation (min=0.03, max=0.14), al-
though, for floor 2 Zone 2, we observe spatial group-
ing lower error E (spatial) = 0.06 < E (domain) =
0.09. For indoor temperature prediction, domain-
wise grouping (min=0.04, max=0.14) yields an error
lower than (min=0.19, max=0.71, grouping = space)
for all floors except in floor 2 with zone 1, where Er-
ror (spatial) = 0.18 < Error (domain) = 0.25, and for
zone 2 Error (spatial) =0.11 < E (domain) = 0.24.
The relative humidity is most challenging to approx-
imate (min=0.37, max=0.66, grouping = space) and
(min=0.14, max=0.63, grouping = type) across all
zones. Overall we see that domain-wise grouping per-
forms better on average, which confirms the intuitive-
ness of being guessed easily by similar peers as seen
from Figure 3.
5.3 Policy Discovery
The policy is a 1D vector made up of n
S
= 138 pos-
itive numbers where each integer encodes the data
affinity group number and a Boolean instruction (0/1)
indicating whether to be powered off or on, respec-
Privacy Sensitive Building Monitoring Through Generative Sensors
113
(a) AC Power.
(b) Light Power.
(c) Appliance Power.
Figure 2: Virtualization prediction on treating an identical
type of power meters as one group.
tively. Given an exhaustive set of policy evidence, the
task is to optimize the bi-partition of {A
g
, V
g
} for
every group g belonging to the affinity mask (A). A
pool of 50 candidate policies is randomly generated
and acts as an input to Algorithm 3, optimized over
n
G
sensor groups.
Figure 4a displays the variation in reconstruction
loss O
3
on the test data when training the system
with only O
1
, O
2
losses and then additionally plug-
ging topology loss (O
4
). It is seen that the fraction of
(a) Temperature.
(b) Luminosity.
(c) Humidity.
Figure 3: Virtualization prediction on processing similar
ambiance channels as one group.
sensors bounded by the policy region of O
3
∈ (1, 2) ∧
O
1
∈ (0.5, 1) is around 45-65% and has a backward
translation error between (0.4, 1.2). Regarding O
4
,
from Figure 4b, it is observed that 5-10 % of total
possible edges or data flow paths are sufficient for a
policy to be competitively accurate. Indeed, policy
configurations exist where the observed error differ-
ence is bounded by within 1.5 units of deviance for
ambiance and energy monitoring sensor groups.
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
114
Number of Sensors
Reconstruction Loss(O3)
0.2
0.4
0.6
0.8
1
2
60 70 80 90 100
O1,O2 O1,O2,O4
Effect of objectives on Topology Discovery
(a) Discovering Policy Space.
Reconstruction Loss (O3)
Measurement Scale
0.05
0.1
0.5
1
1 2 3 4
Forward Translation (O1) Backward Translation (O2) Fraction of sensors
Sparseness (O4)
(b) Evaluating Objectives.
Figure 4: Characteristics of the Policy Space.
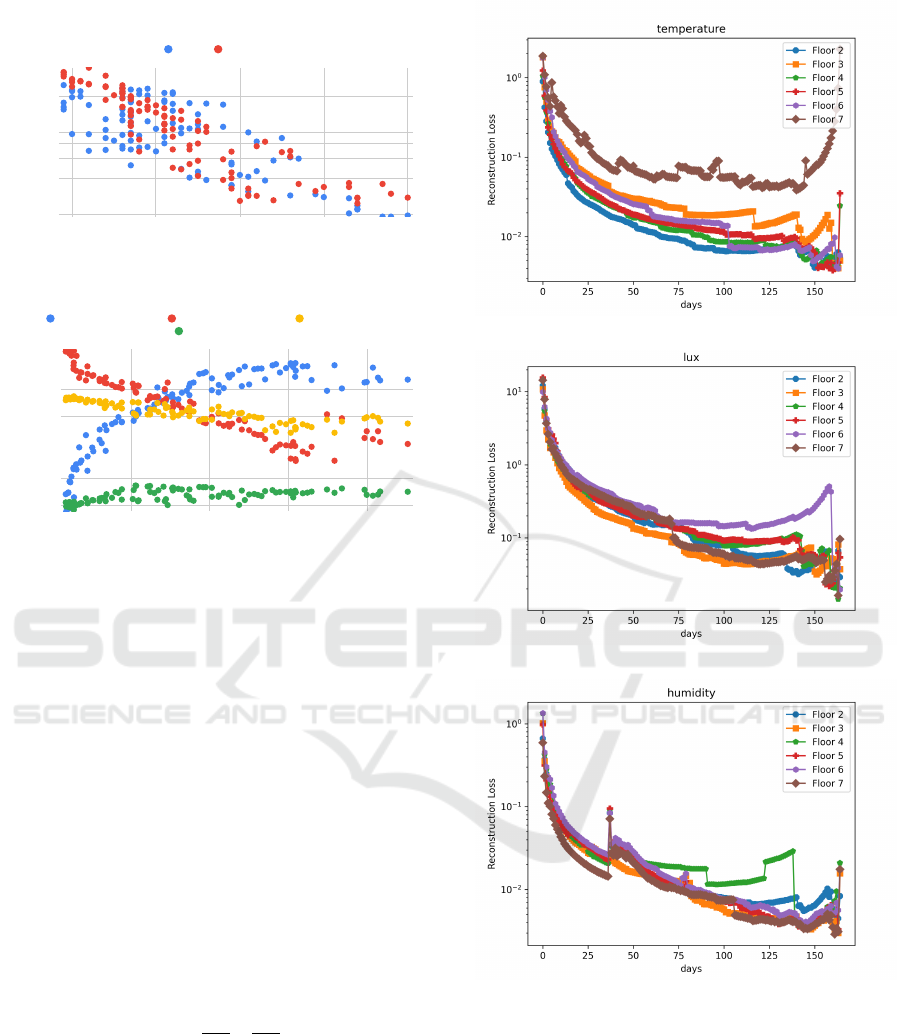
5.4 Policy Re-Calibration
This subsection answers how to incrementally build
up a policy mimicking the situation where a tempo-
rary sensor collects data and updates the policy on
the fly. It is desired for a re-calibrated sensor place-
ment configuration to have high confidence in detect-
ing relatively more challenging spatiotemporal sen-
sor patterns. This helps in deciding which sensors
to include, thereby generating the most negligible re-
construction loss at run time. Once Pareto Optimal
Sensor configurations are generated using the train
data, the system tracks their performance over time
on the hold-out data, assuming every policy is exclu-
sively deployed. The data set per sensor be split into B
batches, where a batch i for a sensor k placed at zone
z is denoted by D
i
k,z
≡ [
T
max
B
:
T
max
B
+ B]. On receiv-
ing D
i
k,z
at i
th
time-step, the learning system evaluates
4 objectives denoted by Equations 6 - 8 to generate
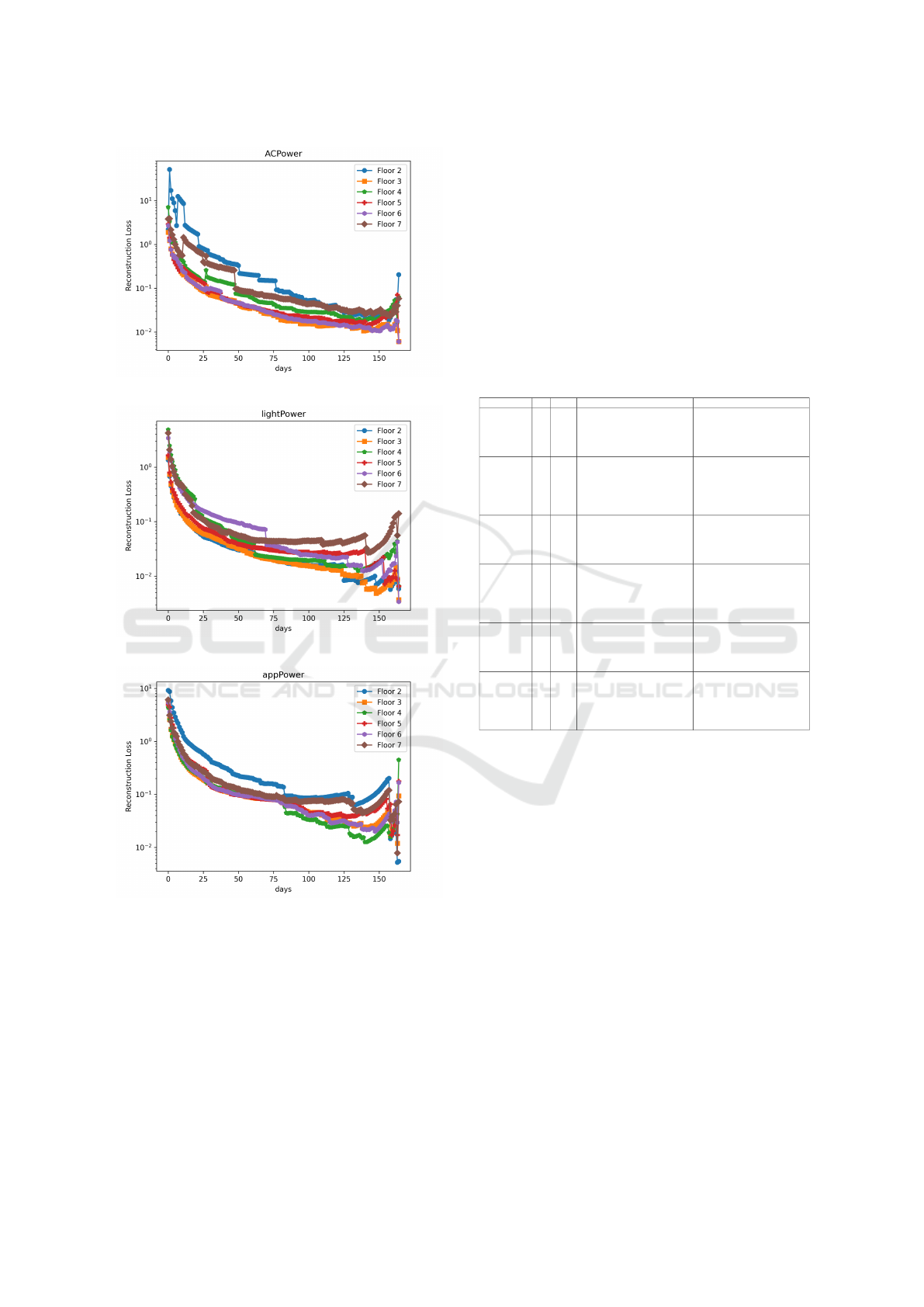
better data transfer topologies. Figures 5 and 6 show
the reconstruction error O
3
on test year for each of 6
sensor types.
We discover that the temperature at the topmost
floor of the building is susceptible to the maximum
environmental fluctuations, and expressed by the di-
verging nature of O
3
> 10% in Figure 5a. Some of the
(a) AC Power Prediction.
(b) Illumination Power Prediction.
(c) Humidity.
Figure 5: Variation of reconstruction loss O
3
in ambiance
sensing group with increasing data feed (X-axis).
significant factors that influence the luminosity level
at a spot are natural lighting, artificial illumination,
and occlusion. The interaction between the three el-
ements is more complicated to model than control-
ling the power for lighting. It is revealed by compar-
ing reconstruction loss (O
3
) between luminosity lev-
els and power consumption in Figures 5b and 6b, re-
spectively. Due to unknown spatial orientation, it is
Privacy Sensitive Building Monitoring Through Generative Sensors
115
(a) AC Power Prediction.
(b) Illumination Power Prediction.
(c) Humidity.
Figure 6: Variation of reconstruction loss O
3
in energy con-
sumption group with increasing data feed (X-axis).
hard to tell which zones have windows. On average,
the approximating power consumption shows close to
10 times lower reconstruction loss than ambient sen-
sors like temperature, luminosity, and humidity. As
per Figure 6a, 75 days or 2.5 months of data collec-
tion suffices to keep the approximation error below
10% for all the six floors, the probable reason be-
ing controlled power consumption by an AC. Notably,
the approximation ability of light power and lux is
close to 98% accurate for floor 2 compared to 90%
correct for the top two floors (6,7). In a continual
setting, the system updates the hypothesis space and
auto-re-calibrates to stabler sensor placement config-
urations with the availability of more data. Table 2
gives the optimal sensor placement distribution that
uses 45 sensors instead of 138, bringing in a 67% sen-
sor reduction.
Table 2: Optimal installation suggestions to ecologically
monitor the seven-storied buildings in Thailand as covered
by the data set.
Type # Save Installation Sites Approximated Locations
Temperature 9 0.61
’FL-4Z4’, ’FL-2Z2’, ’FL-4Z2’,
’FL-3Z1’, ’FL-7Z5’, ’FL-3Z2’,
’FL-5Z1’, ’FL-7Z1’, ’FL-3Z5’
FL-4Z5’, ’FL-6Z4’, ’FL-6Z5’,
’FL-2Z1’, ’FL-6Z1’, ’FL-2Z4’,
’FL-6Z2’, ’FL-4Z1’, ’FL-7Z4’,
’FL-5Z5’, ’FL-5Z4’, ’FL-7Z2’,
’FL-3Z4’, ’FL-5Z2’
Humidity 6 0.74
’FL-4Z4’, ’FL-3Z1’, ’FL-7Z2’,
’FL-7Z1’, ’FL-3Z5’, ’FL-5Z2’
FL-4Z5’, ’FL-2Z2’, ’FL-6Z4’,
’FL-6Z5’, ’FL-2Z1’, ’FL-6Z1’,
’FL-4Z2’, ’FL-2Z4’, ’FL-6Z2’,
’FL-4Z1’, ’FL-7Z4’, ’FL-7Z5’,
’FL-5Z5’, ’FL-3Z2’, ’FL-5Z4’,
’FL-5Z1’, ’FL-3Z4’
Luminosity 8 0.65
’FL-2Z2’, ’FL-2Z1’, ’FL-6Z1’,
’FL-4Z2’, ’FL-3Z1’, ’FL-7Z5’,
’FL-3Z2’, ’FL-7Z2’
’FL-4Z5’, ’FL-4Z4’, ’FL-6Z4’,
’FL-6Z5’, ’FL-2Z4’, ’FL-6Z2’,
’FL-4Z1’, ’FL-7Z4’, ’FL-5Z5’,
’FL-5Z4’, ’FL-5Z1’, ’FL-7Z1’,
’FL-3Z5’, ’FL-3Z4’, ’FL-5Z2’
lightPower 7 0.7
’FL-2Z2’, ’FL-6Z5’, ’FL-4Z1’,
’FL-3Z1’, ’FL-7Z5’, ’FL-7Z2’,
’FL-3Z4’
’FL-4Z5’, ’FL-4Z4’, ’FL-6Z4’,
’FL-2Z1’, ’FL-6Z1’, ’FL-4Z2’,
’FL-2Z4’, ’FL-6Z2’, ’FL-7Z4’,
’FL-5Z5’, ’FL-3Z2’, ’FL-5Z4’,
’FL-5Z1’, ’FL-7Z1’, ’FL-3Z5’,
’FL-5Z2’
ACPower 10 0.57
’FL-2Z1’, ’FL-6Z1’, ’FL-7Z4’,
’FL-3Z1’, ’FL-7Z5’, ’FL-3Z2’,
’FL-5Z4’, ’FL-7Z2’, ’FL-5Z1’,
’FL-5Z2’
’FL-4Z5’, ’FL-4Z4’, ’FL-2Z2’,
’FL-6Z4’, ’FL-6Z5’, ’FL-4Z2’,
’FL-2Z4’, ’FL-6Z2’, ’FL-4Z1’,
’FL-5Z5’, ’FL-7Z1’, ’FL-3Z5’,
’FL-3Z4’
appPower 5 0.78
FL-4Z4’, ’FL-2Z4’, ’FL-4Z1’,
’FL-5Z4’, ’FL-5Z1’
’FL-4Z5’, ’FL-2Z2’, ’FL-6Z4’,
’FL-6Z5’, ’FL-2Z1’, ’FL-6Z1’,
’FL-4Z2’, ’FL-6Z2’, ’FL-7Z4’,
’FL-3Z1’, ’FL-7Z5’, ’FL-5Z5’,
’FL-3Z2’, ’FL-7Z2’, ’FL-7Z1’,
’FL-3Z5’, ’FL-3Z4’, ’FL-5Z2’
5.5 Comparative Study
Now we test the performance of the virtual sensing
field in comparison to a random distribution, Sup-
port Vector Decomposition guided placement, and
sparse sensor placement optimization for classifica-
tion (SSPOC) (de Silva et al., 2021). When the
number of sensors is gradually incremented, Figure
7 shows the performance gain in accuracy using our
approach. The benchmark methods show a low vir-
tualization quotient thereby needing more sensors to
maintain comparable levels of accuracy. The key
highlights of our approach to monitoring a building
are as follows:
• Evidence investigation measures the virtualiza-
tion capacity at every place and displays the error
if a sensor were to be powered off at that spot.
• Sensor placement configuration is augmented
with in-house data circulation pathways. We ob-
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
116
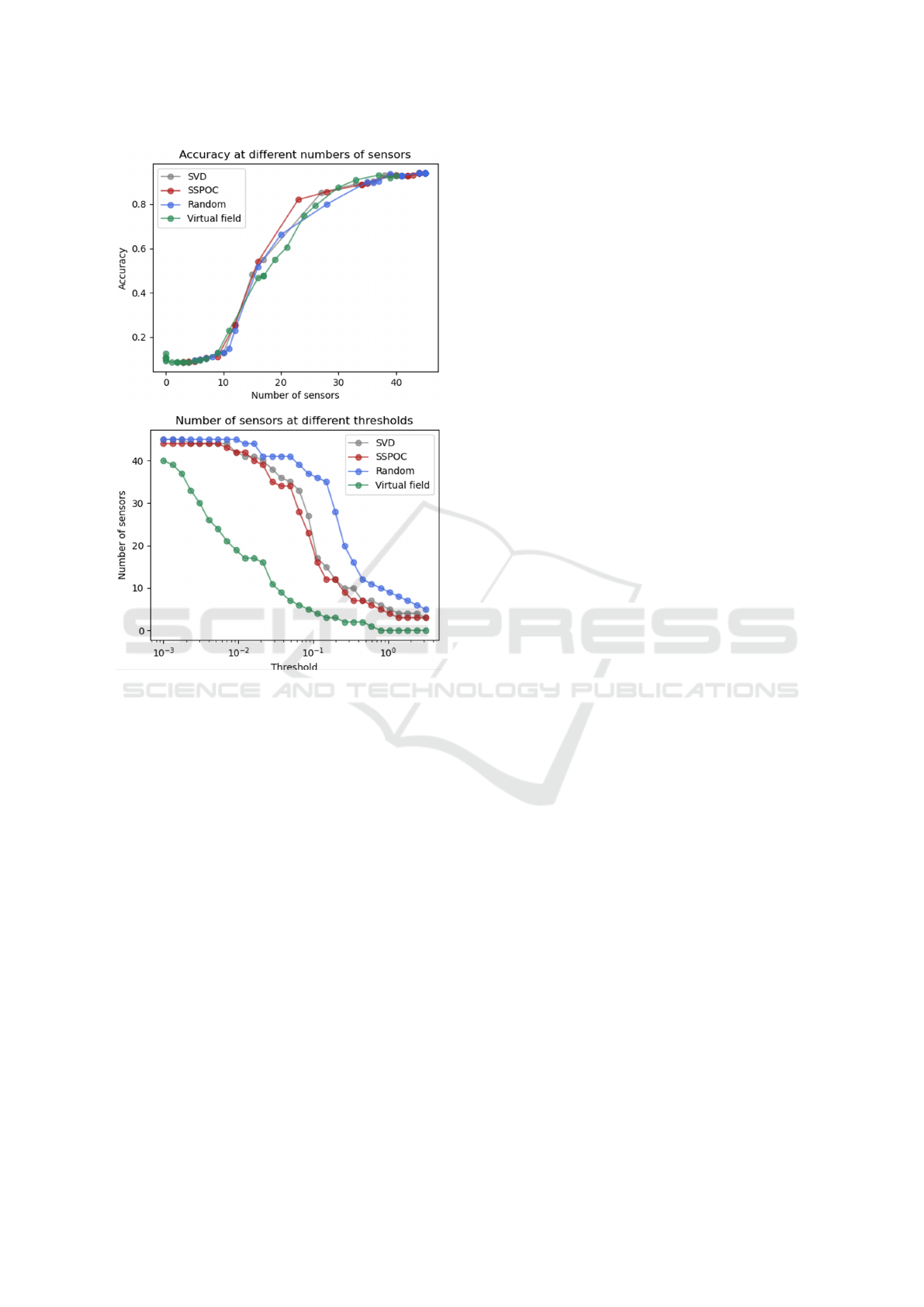
Figure 7: Gain in accuracy using virtual sensing field in
comparison to state of art SSPOC and SVD methods.
serve the topological gain in obtaining a better
estimator through linking sensors of similar type
rather than constraining to floor-specific only.
• The system, in a nutshell, segregates sensor data
stream into more intricate and more straightfor-
ward predictable patterns. The procedure shows
a lifelong re-calibration strategy to affirm the in-
tuition that placing sensors mostly at places with
low virtualization capacity can provide 100 %
coverage with less than 10 % error.
For example, the behavior of a group of tempera-
ture sensors situated across multiple zones can prob-
ably be learned by an optimal fraction of embedded
devices. For example, a sensor with a power rating of
50 watts consumes 0.05×365×24 = 438 units yearly.
Now imagine 100 such operating sensors, therefore
needing, 43, 800kW h of energy annually. One can ar-
gue about lowering the energy need by powering up a
fraction of the sensors only.
6 CONCLUSION
In this paper, we demonstrate that, according to a gen-
eral methodology, too many sensors are usually de-
ployed in buildings. Thus, this work emphasizes the
utility of spatiotemporal knowledge in bringing down
the operating cost of building management systems.
With explainable insights, the missing sensor approx-
imation can be kept competitively accurate with bidi-
rectional power-ambiance converters. The extension
of the work can be studying the Utopian sensor place-
ment across zones with theoretical learning guaran-
tees.
Future works include the following insights. First,
evaluating the model drift in an online learning setting
is a benefit, which can be the next step toward auto-
updating spatiotemporal models. Second, the experi-
mental results call for another way to deploy sensors
in a building. As part of a sustainable approach to re-
ducing the number of sensors, a facility undergoing
renovation could be temporarily equipped with sen-
sors, according to the ”sensors everywhere” method-
ology, to understand the uses of the building. Then,
thanks to our methods, we can list the sensors that are
in excess, which can be dismantled, and then rede-
ployed in another building under renovation.
Thirdly, in a slightly orthogonal way, we could
imagine physically deploying a small number of sen-
sors in a building renovation and then introducing vir-
tual sensors behaving like the sensors next to them.
This information increase would allow us to study
whether the sensor is essential to the building model
or whether we can do without it. In this context, one
can utilize temporal graph neural networks to capture
the dynamics between rooms or between a room and
a sensor.
ACKNOWLEDGEMENTS
This work has been partially supported by the Multi-
disciplinary Institute on Artificial Intelligence (MIAI)
at Grenoble Alpes (ANR-19-P3IA-0003) and the Re-
source manager for the Cloud of Things project
(Greco – ANR-16-CE25-0016). Angan Mitra is
supported by a convention CIFRE-2018/0874 with
ANRT.
REFERENCES
Ayenu-Prah, A. and Attoh-Okine, N. (2010). A criterion for
selecting relevant intrinsic mode functions in empiri-
Privacy Sensitive Building Monitoring Through Generative Sensors
117

cal mode decomposition. Advances in Adaptive Data
Analysis, 2(01):1–24.
Barbosh, M., Singh, P., and Sadhu, A. (2020). Empirical
mode decomposition and its variants: a review with
applications in structural health monitoring. Smart
Materials and Structures, 29(9):093001.
Brunton, B. W., Brunton, S. L., Proctor, J. L., and Kutz,
J. N. (2013). Optimal sensor placement and en-
hanced sparsity for classification. arXiv preprint
arXiv:1310.4217.
Chen, Z. and Liu, B. (2016). Lifelong machine learning.
Synthesis Lectures on Artificial Intelligence and Ma-
chine Learning, 10(3):1–145.
Clark, E., Askham, T., Brunton, S. L., and Kutz, J. N.
(2018). Greedy sensor placement with cost con-
straints. IEEE Sensors Journal, 19(7):2642–2656.
de Silva, B. M., Manohar, K., Clark, E., Brunton, B. W.,
Brunton, S. L., and Kutz, J. N. (2021). Pysensors: A
python package for sparse sensor placement. arXiv
preprint arXiv:2102.13476.
Deb, K., Pratap, A., Agarwal, S., and Meyarivan, T. (2002).
A fast and elitist multiobjective genetic algorithm:
Nsga-ii. IEEE transactions on evolutionary compu-
tation, 6(2):182–197.
Emmanuel, C., Romberg, J., and Tao, T. (2005). Stable
signal recovery from incomplete and inaccurate mea-
surements.
Fontugne, R., Ortiz, J., Culler, D., and Esaki, H.
(2012). Empirical mode decomposition for intrinsic-
relationship extraction in large sensor deployments.
In Workshop on Internet of Things Applications, IoT-
App, volume 12.
Garg, V. and Bansal, N. K. (2000). Smart occupancy sen-
sors to reduce energy consumption. Energy and Build-
ings, 32(1):81–87.
Gong, Z., Cui, Q., Chaccour, C., Zhou, B., Chen, M., and
Saad, W. (2021). Lifelong learning for minimizing
age of information in internet of things networks. In
ICC 2021-IEEE International Conference on Commu-
nications, pages 1–6. IEEE.
Hojjati, S. N. and Khodakarami, M. (2016). Evaluation of
factors affecting the adoption of smart buildings us-
ing the technology acceptance model. International
Journal of Advanced Networking and Applications,
7(6):2936.
Hong, D., Ortiz, J., Whitehouse, K., and Culler, D. (2013).
Towards automatic spatial verification of sensor place-
ment in buildings. In Proceedings of the 5th ACM
Workshop on Embedded Systems For Energy-Efficient
Buildings, pages 1–8.
Jia, M., Komeily, A., Wang, Y., and Srinivasan, R. S.
(2019). Adopting internet of things for the develop-
ment of smart buildings: A review of enabling tech-
nologies and applications. Automation in Construc-
tion, 101:111–126.
Ko, C.-W., Lee, J., and Queyranne, M. (1995). An exact al-
gorithm for maximum entropy sampling. Operations
Research, 43(4):684–691.
Ma, Z., Badi, A., and Jorgensen, B. N. (2016). Mar-
ket opportunities and barriers for smart buildings. In
2016 IEEE Green Energy and Systems Conference
(IGSEC), pages 1–6. IEEE.
Ma, Z., Billanes, J. D., and Jørgensen, B. N. (2017).
A business ecosystem driven market analysis: The
bright green building market potential. In 2017 IEEE
Technology & Engineering Management Conference
(TEMSCON), pages 79–85. IEEE.
Manohar, K., Hogan, T., Buttrick, J., Banerjee, A. G., Kutz,
J. N., and Brunton, S. L. (2018). Predicting shim gaps
in aircraft assembly with machine learning and sparse
sensing. Journal of manufacturing systems, 48:87–95.
Medeiros, D. R. d. S. and Fernandes, M. A. (2020).
Distributed genetic algorithms for low-power, low-
cost and small-sized memory devices. Electronics,
9(11):1891.
Mitra, A., Ngoko, Y., and Trystram, D. (2021). Impact of
federated learning on smart buildings. In 2021 In-
ternational Conference on Artificial Intelligence and
Smart Systems (ICAIS), pages 93–99. IEEE.
Mitra, A., Thang, N. K., Nguyen, T.-A., Trystram, D.,
and Youssef, P. (2022). Online decentralized frank-
wolfe: From theoretical bound to applications in
smart-building. arXiv preprint arXiv:2208.00522.
Nirjon, S. (2018). Lifelong learning on harvested energy. In
Proceedings of the 16th Annual International Confer-
ence on Mobile Systems, Applications, and Services,
pages 500–501.
Pipattanasomporn, M., Chitalia, G., Songsiri, J., Aswakul,
C., Pora, W., Suwankawin, S., Audomvongseree, K.,
and Hoonchareon, N. (2020). Cu-bems, smart build-
ing electricity consumption and indoor environmental
sensor datasets. Scientific Data, 7(1):1–14.
Thrun, S. (1995). Lifelong learning: A case study. Techni-
cal report, Carnegie-Mellon Univ Pittsburgh pa Dept
of Computer Science.
Umbarkar, A. J. and Sheth, P. D. (2015). Crossover opera-
tors in genetic algorithms: a review. ICTACT journal
on soft computing, 6(1).
Wong, J. K., Li, H., and Wang, S. (2005). Intelligent build-
ing research: a review. Automation in construction,
14(1):143–159.
Xu, Y., Ahokangas, P., Turunen, M., M
¨
antym
¨
aki, M., and
Heikkil
¨
a, J. (2019). Platform-based business models:
Insights from an emerging ai-enabled smart building
ecosystem. Electronics, 8(10):1150.
Yoganathan, D., Kondepudi, S., Kalluri, B., and Mantha-
puri, S. (2018). Optimal sensor placement strategy for
office buildings using clustering algorithms. Energy
and Buildings, 158:1206–1225.
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
118
