
Uncertainty Estimation in Multi-Agent Distributed Learning
for AI-Enabled Edge Devices
Gleb Radchenko
1a
and Victoria Andrea Fill
2b
1
Silicon Austria Labs, Sandgasse 34, 8010 Graz, Austria
2
FH Joanneum, Alte Poststraße 149, 8020 Graz, Austria
Keywords: Edge Computing, Fog Computing, Machine Learning, IoT.
Abstract: Edge IoT devices, once seen as low-power units with limited processing, have evolved with introduction of
FPGAs and AI accelerators, significantly boosting their computational power for edge AI. This leads to new
challenges in optimizing AI for energy and network resource constraints in edge computing. Our study
examines methods for distributed data processing with AI-enabled edge devices to improve collaborative
learning. We focus on the challenge of assessing confidence in learning outcomes amid data variability faced
by agents. To address this issue, we investigate the application of Bayesian neural networks, proposing a
novel approach to manage uncertainty in distributed learning environments.
1 INTRODUCTION
Traditionally, Internet of Things (IoT) Edge devices
have been perceived primarily as low-power
components with limited capabilities for autonomous
operations (Samie et al., 2016). However, in recent
years, the focus of IoT research has shifted towards
optimizing knowledge exchange and implementing
AI and neural networks (NN) on edge devices. These
advancements are largely due to the innovation of
FPGAs and AI accelerators, which have
exponentially increased the computational
capabilities of Edge devices (Liang et al., 2023;
Parmar et al., 2023; Wang et al., 2022).
This evolution raises critical questions that system
developers should address:
Knowledge Exchange: How can we implement
seamless knowledge sharing between edge
devices to refine machine learning algorithms
while maintaining data privacy?
Resource Management: What strategies can
effectively manage the computational power of
these increasingly autonomous, high-performance
devices?
a
https://orcid.org/0000-0002-7145-5630
b
https://orcid.org/0009-0006-6289-0098
Spatiotemporal Locality: How can we address
the localized nature of data to ensure real-time or
near-real-time task execution?
The challenges presented by limited resources on
edge devices and the spatiotemporal locality of data
are particularly significant. These issues require new
approaches to manage computational capabilities and
efficiently perform tasks in real-time or near-real-
time modes.
The goal of this research is to investigate the
algorithms and methods for deploying distributed
machine learning within the framework of
autonomous, network-capable, sensor-equipped, AI-
enabled edge devices. Specifically, we focus on
determining confidence levels in learning outcomes,
considering the spatial and temporal variability of
data sets encountered by independent agents. To
address this issue, we investigate the potential of the
Distributed Neural Network Optimization (DiNNO)
algorithm (Yu et al., 2022), aiming to extend it for
organizing distributed data processing and
uncertainty estimation using Bayesian neural
networks (BNN).
Within the scope of this paper, we explore the
interaction of AI-enabled edge devices using the case
of robotic platforms engaged in the task of
Radchenko, G. and Fill, V.
Uncertainty Estimation in Multi-Agent Distributed Learning for AI-Enabled Edge Devices.
DOI: 10.5220/0012728500003711
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 14th International Conference on Cloud Computing and Services Science (CLOSER 2024), pages 311-318
ISBN: 978-989-758-701-6; ISSN: 2184-5042
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
311

collaborative mapping. To achieve this, we need to
address the following tasks:
Implement a simulation of robots navigating a 3D
environment using the Webots platform
1
,
augmented with advanced LiDAR sensors for
detailed environmental mapping.
Decouple the DiNNO algorithm implementation
into independent processes, enabling
asynchronous network communication for
distributed learning.
Integrate distributed uncertainty estimation into
the resulting models by applying BNNs.
The rest of the paper is structured as follows. Section
2 is devoted to analyzing the state-of-the-art research,
providing an overview of distributed machine learning
methods, and implementing BNNs for uncertainty
estimation. In Section 3, we present a collaborative
mapping case. Section 4 introduces a distributed
implementation of the DiNNO framework. Section 5
focuses on distributed uncertainty estimation,
exploring techniques for integrating BNN into
DiNNO. Implementation details and the evaluation of
our approaches are detailed in Section 6, followed by
Section 7, which offers our conclusions and discussion
of future work directions.
2 RELATED WORK
2.1 Distributed Machine Learning
Methods
Distributed machine learning (ML) algorithms,
distinguished by their communication mechanisms,
primarily support the exchange of model parameters,
model outputs, or hidden activations. These
exchanges can be enabled through peer-to-peer or
client-server architectures (Park et al., 2021). The
primary approaches utilized within these algorithms
may be categorized as follows.
Federated Learning (FL) orchestrates the
periodic transmission of local training parameters
(e.g., weights and gradients of a NN) from workers to
a central parameter server. This server then performs
model averaging and disseminates the updated global
model to the workers. Such a strategy not only may
preserve data privacy by avoiding the need for raw
data exchange but also may enhance communication
efficiency through adjustable transmission
intervals (Lim et al., 2020). The authors of (Abreha et
al., 2022) identify FL as a solution to challenges in
1
https://www.cyberbotics.com
edge computing environments, such as unwanted
bandwidth loss, data privacy issues, and legalization
concerns. They highlight that FL allows for co-
training models across distributed clients, such as
mobile phones, automobiles, and hospitals, via a
centralized server while maintaining data
localization.
The authors of (Nguyen et al., 2022) propose an
extension of the FL model, called FedFog, designed
to enable FL over a wireless fog-cloud system. The
authors address key challenges such as non-
identically distributed data and user heterogeneity.
The FedFog algorithm performs local aggregation of
gradient parameters at fog servers and a global
training update in the cloud.
Alternating Direction Method of Multipliers
(ADMM)-derived Methods (Boyd, 2010) (such as
DiNNO (Yu et al., 2022), GADMM, and CADMM)
aim to implement the distributed learning in the
absence of a central coordinating entity by enabling
communication directly between the neighboring
worker nodes in a peer-to-peer (P2P) manner. One
critical issue of FL and such P2P learning methods is
that the communication overhead is proportional to
the number of model parameters, limiting their
efficacy in supporting deep NNs (Elgabli et al., 2020).
Federated Distillation utilizes the exchange of
model outputs, which are significantly lower in
dimensionality compared to the full model sizes for
distributed learning. In this approach, each worker
performs local iterations based on its individual loss
function. This process is enhanced with a
regularization component that measures the
discrepancy between the worker's predicted output
for a specific training sample and the aggregated
global output for the same class. A widely known
application of knowledge distillation is model
compression, through which the knowledge of a large
pretrained model may be transferred to a smaller one
(Ahn et al., 2019).
Split Learning (SL) partitions multi-layer NN
into segments, thus making it possible to train large-
sized deep NN that exceed the memory capacities of
a single edge device. This approach divides the NN
into lower NN segments on the workers' devices, each
containing raw data and a shared upper NN segment
hosted on a parameter server. The NN cut layer is a
boundary between the lower and upper NN segments.
Workers compute the activations at the NN cut layer
and send these activations to the parameter server.
The parameter server uses these activations as inputs
for the upper NN segment to continue the forward
CLOSER 2024 - 14th International Conference on Cloud Computing and Services Science
312

pass, compute the loss, and initiate the backward pass.
Gradients calculated at the cut layer are then
transmitted back to the workers, allowing them to
update the weights of the lower NN segments.
However, the efficacy of SL in terms of
communication is subject to ongoing discussion
(Koda et al., 2020).
2.2 Uncertainty Estimation and
Bayesian Neural Networks
2.2.1 Bayesian Neural Networks
In a conventional NN architecture, a linear neuron is
characterized by a weight (𝑤), a bias (𝑏), and an
activation function (𝑓
). Given an input 𝑥, a single
linear neuron performs the following operation:
𝑦=
𝑓
(𝑤⋅ 𝑥 + 𝑏)
(1
)
where 𝑦 is the output of the neuron.
Bayesian Neural Networks (BNNs) employ a
Bayesian approach to train stochastic NNs (Jospin et
al., 2022). Instead of deterministic weights and
biases, they utilize probability distributions, denoted
𝑃(𝑤) for weights and 𝑃(𝑏) for biases. Typically,
these distributions are approximated as Gaussian,
with mean and standard deviation derived from the
training data. Hence, a Bayesian neuron outputs a
range of possible values, not just one. So, the
operation of a Bayesian Linear neuron can be
described as:
𝑃(𝑦|𝑥) =
𝑓
𝑃(𝑤) × 𝑥+𝑃(𝑏)
(2
)
In a BNN, the Gaussian distributions for weights
and biases may be defined by the mean 𝜇 and the
standard deviation 𝜎. For weights, the
distribution 𝑃(𝑤) is modeled as a Gaussian
distribution with a mean 𝑤
and a standard deviation
𝑤
, where:
𝑤
=log(1+𝑒
)
(3
)
The parameter 𝑤
ensures that the standard
deviation is always positive. Similarly, the
distribution 𝑃(𝑏) for biases is represented as a
Gaussian distribution with a mean 𝑏
and a standard
deviation 𝑏
, where:
𝑏
=log(1+𝑒
)
(4
)
During the forward pass of a Bayesian neuron,
these distributions are sampled to obtain a weight and
bias for each neuron. The sampled weights and biases
are then used to compute the neuron's output. The
parameters 𝑤
, 𝑤
, 𝑏
, 𝑏
are learned during NN
training to optimize the network's performance.
BNNs, unlike traditional NNs that use a single
forward pass, can perform multiple forward passes
and calculate the mean and standard deviation of the
outputs. These statistics can reveal the model's
uncertainty for each input data point, varying with the
problem the NN tackles.
2.2.2 Kullback-Leibler Divergence
Kullback-Leibler Divergence (KL Divergence)
(Claici et al., 2020; Kullback & Leibler, 1951) is
employed to account for the difference between the
Gaussian distributions that represent the parameters
of the BNN. KL Divergence serves as a measure to
quantify the dissimilarity between two probability
distributions and can be generally computed as:
𝐷
(
𝑔∥ℎ
)
=𝑔
(
𝑥
)
log
𝑔(𝑥)
ℎ
(
𝑥
)
d𝑥
(5)
where 𝑔(𝑥) and ℎ(𝑥) are two probability density
functions defined over the same support. The concept
of "expected excess surprise" captures the core idea
behind KL Divergence, reflecting the expected
degree of "surprise" encountered when another
"model" distribution approximates an actual
distribution. As outlined by (Belov & Armstrong,
2011), if 𝑁
(𝜇
,𝜎
) and 𝑁
(𝜇
,𝜎
) are two normal
probability density functions, equation (5) may be
reduced to:
𝐷
(
𝑁
∥𝑁
)
=
1
2
log
𝜎
𝜎
+
𝜎
+
(
𝜇
− 𝜇
)
𝜎
−1
(6)
Within the BNNs, applying KL Divergence helps
quantify the deviation of the neural network's
parameter distribution from a specified prior
distribution. The overall loss in a BNN model is
generally expressed as:
𝑡𝑜𝑡𝑎𝑙
=𝑏𝑎𝑠𝑒
+ 𝑘𝑙
× 𝑘𝑙
(7)
where 𝑏𝑎𝑠𝑒
refers to the conventional loss
function, such as Binary Cross-Entropy or Mean
Squared Error; 𝑘𝑙
is a hyperparameter that
enables adjusting of the level of uncertainty in the
model's outcomes; and 𝑘𝑙
is the sum of the
KL Divergence between the distribution of BNN
modules 𝑁
(𝜇
,𝜎
) and a predefined normal
distribution 𝑁
(𝜇
,𝜎
).
3 COLLABORATIVE MAPPING
CASE
As a case study for a distributed AI application
operating within the Edge Cloud, we have chosen a
Uncertainty Estimation in Multi-Agent Distributed Learning for AI-Enabled Edge Devices
313
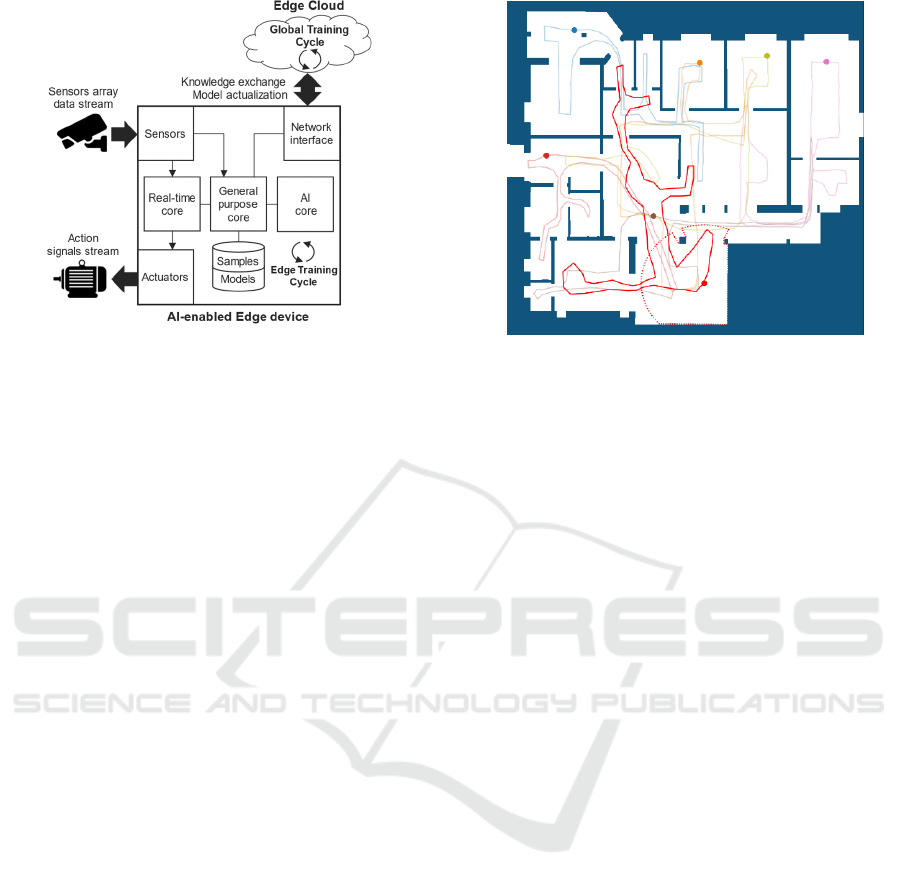
Figure 1: Components of AI-Enabled edge device.
collaborative environment mapping problem. This
task involves deploying a network of independent,
robotic edge devices (robots) at various starting
points. Each device is tasked with building a coherent
map of the environment, utilizing installed sensors,
and exchanging knowledge about the environment
with other devices.
These devices are designed to update a local ML
model with newly acquired data samples and
facilitate inter-device communication via a network
interface (see Figure 1). Equipped with computational
cores dedicated to specific responsibilities, the
devices feature:
Real-time core for immediate data processing
and direct control of actuators.
General-purpose core for overall device control.
AI core to support an edge training cycle.
The Distributed Neural Network Optimization
(DiNNO) (Yu et al., 2022) algorithm is employed as
the principal method for addressing the distributed
machine learning problem in our study. DiNNO
enables the implementation of distributed learning
within a network of independent agents. These agents
are identical robotic platforms regarding
computational capabilities and sensor equipment.
Each robot possesses its own sensor data set and
maintains an individual version of the NN. These
robots refine their NN models throughout the learning
phase using fresh sensory inputs and then exchange
NN parameters. This iterative process ensures that,
over time, all agents align on a harmonized NN
representation. The CubiCasa5K data set (Kalervo et
al., 2019) was used as a reference for the floor plans
generation (see Figure 2).
Figure 2: Visualization of the environment map, including
starting points, exploration pathways and lidar range for the
robotic agents, as described by (Yu et al., 2022).
4 DISTRIBUTED EDGE
LEARNING APPROACH
To enhance the DiNNO algorithm for edge
computing, we moved from a centralized learning
framework that uses sequential processes and shared
memory to a distributed version. In this setup, each
agent operates independently, processing local
LiDAR data, optimizing NN parameters locally, and
exchanging updated NN parameters with peers
through messages.
We have introduced an epoch-based decentralized
consensus algorithm to support the decentralized
peer-to-peer exchange of NN parameters among
agents (see Algorithm 1). The maximum amount of
synchronization epochs (MaxRound), network socket
(Socket), unique peer identifier (Id), and the initial
state of the NN parameters (State) are given as inputs
for the algorithm. PeerComplete[ ] and PeerState[ ]
structures are utilized to track the completion status
and states of peers, respectively. The core of the
algorithm lies in the exchange of two types of
messages:
The RoundComplete message indicates the
completion of a round by a peer.
The State message contains the peer's state for the
current round.
CLOSER 2024 - 14th International Conference on Cloud Computing and Services Science
314

Algorithm 1: Peers State Exchange.
R
equire:
M
axRound, Socket, Id, State
I
nitialize: Round, PeerComplete[ ], PeerState[ ]
M
essage ← (State, 0)
SEND(Socket, Message, Id)
w
hile Round < MaxRound do
(Message, PeerId) ← R
ECEIVE(Socket)
if Message is RoundComplete then
PeerComplete[PeerId] ←
TRUE
else
if Round < Message.Round then
F
INISHROUND
end if
PeerState[PeerId] ← Message.State
end if
if ∀s ∈ PeerState, s ≠ Ø then
State ← N
ODEUPDATE(State, PeerState)
∀s ∈ PeerState, s ← Ø
PeerCompleted[Id] ←
TRUE
PeerState[Id] ← State
Message ← RoundComplete
S
END (Socket, Message, Id)
end if
if ∀p ∈ PeerComplete, p =
TRUE then
FINISHROUND
end if
e
nd while
f
unction FINISHROUND
∀p ∈ PeerComplete, p ←
FALSE
Round ← Round + 1
Message.State ← State
Message.Round ← Round
S
END (Socket, Message, Id)
e
nd function
The introduction of the RoundComplete message
alongside the round finalization logic addresses the
issues introduced by the latency in the message
delivery. These challenges include out-of-order
messages, delayed status updates, and
desynchronization between rounds. A
RoundComplete message is sent by a peer only after
it has received all State messages from the other
peers. It ensures that a peer only advances to the next
round once all peers have completed the current
round, indirectly handling message delays by waiting
for all messages to be received before proceeding.
As for the out-of-order messages, the agent checks
if the received State message is from the future round.
If so, it triggers the F
INISHROUND function to ensure
the peer catches up to the correct round. This
mechanism helps in managing out-of-order deliveries
due to latency.
This algorithm version assumes all messages will
eventually reach their intended recipients, not
considering agent malfunctions, halts, or permanent
network equipment failures that could cause message
loss or communication breakdowns.
5 DISTRIBUTED UNCERTAINTY
ESTIMATION
To address uncertainty estimation in the distributed
mapping problem, we incorporate a BNN by
replacing the conventional linear layers in the NN
with Bayesian Linear Layers. The architecture of the
BNN is detailed as follows:
Input Layer (2): x, y – an input coordinate
representing the global position on the
environment map.
SIRENLayer (256): a layer with a sinusoidal
activation function suitable for Neural Implicit
Mapping.
4 x Bayesian Linear Layers (256): four Bayesian
Linear layers with 256 nodes each, activated by
the ReLU function. These layers are probabilistic
and support uncertainty estimation.
Output Layer (1): a linear layer with one node
activated by the Sigmoid function.
This modification introduces probabilistic inference
to the model, allowing for estimating uncertainty in
the network's predictions.
BNNs stand out for their ability to measure
prediction uncertainty, unlike deterministic networks
that give a single output. By performing multiple
forward passes to compute outputs' mean and
standard deviation, BNNs offer insight into the
model's confidence for each mesh grid point. To
ensure correct regularization of the BNN parameters
during the distributed learning regularization phase,
Algorithm 2 has been developed to consider the
semantics of median (µ) and standard deviation (ρ)
parameters of BNN neurons. We utilize
KL Divergence, as detailed in Equation (6), for the
regularization of BNN ρ-parameters between the
models of individual actors.
Algorithm 2: Optimization of BNN Parameters.
Require:
M
odel, Optimize
r
µ
, Optimize
r
ρ
,
W
µ
,
W
ρ
, Iter,
𝜃
, 𝜃
, Duals
µ
, Duals
ρ
for i ← 1 to Iter do
Reset gradients of Optimizer
µ
and Optimizer
ρ
PredLoss ← COMPUTELOSS(Model)
𝜃
,𝜃
← EXTRACTPARAMETERS(Model)
Reg
µ
← L2REGULARIZATION(𝜃
,𝜃
)
Reg
ρ
← D_KL(𝜃
,𝜃
)
Loss
µ
← PredLoss + ⟨𝜃
,Duals
µ
⟩ + W
µ
× Reg
µ
Loss
ρ
← ⟨𝜃
,Duals
ρ
⟩ + W
ρ
× Reg
ρ
U
PDATEPARAMETERS(Optimizer
µ
,Loss
µ
)
UPDATEPARAMETERS (Optimizer
ρ
,Loss
ρ
)
end for
Uncertainty Estimation in Multi-Agent Distributed Learning for AI-Enabled Edge Devices
315
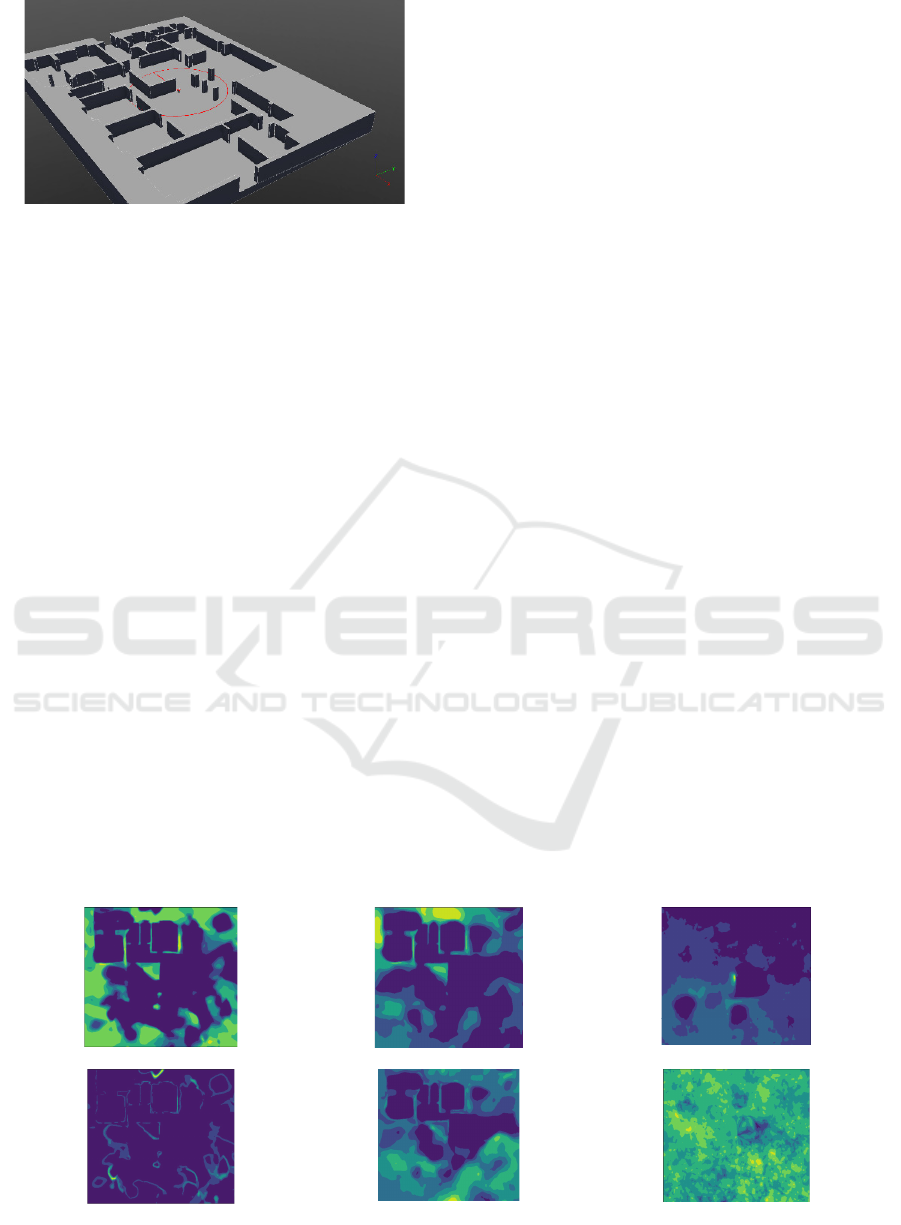
Figure 3: Visualization of the 3D model of the environment,
generated from the floor plan, showcasing a LiDAR-
equipped TurtleBot navigating the space in a Webots
simulation.
6 IMPLEMENTATION AND
EVALUATION
Using floor plans from the CubiCasa5K dataset, we
created STL 3D interior models for robotic
exploration. These models were imported into
Webots to simulate TurtleBot robots navigating these
spaces, as illustrated in Figure 3. Webots allowed us
to implement 3D robotic systems and environments
with typical sensors like cameras and LiDAR,
enabling realistic sensor noise and measurement
uncertainties in our experiments.
This study assumes that all robots have access to
global positioning information. Agents' movement
paths were predefined to create simulation programs
for their interior navigation. During navigation,
LiDAR sensor data collection is simulated as a
Webots data stream.
The experiment involves launching seven
independent agents that gradually collect information
from LiDAR sensors while exploring a virtual interior
space. This paper examines the analysis of data sets
collectively collected and processed after the agents
completed their traversal. This method is necessary
because NN training requires significant energy,
which might not be accessible to autonomous edge
devices in mobile investigation mode.
Each agent runs as a separate Python process.
Agent communication occurs via direct TCP
connections between processes on the same virtual
local network. The ZeroMQ library is used for
asynchronous data exchange. Containerization of
agent processes is achieved using Singularity
containers equipped with GPU access. In the
experiments outlined, we initiate all processes on
GPU-enabled computing nodes managed by the
SLURM workload manager.
6.1 Single-Agent Uncertainty
Estimation
We conducted a series of experiments with a single
isolated agent to evaluate the effectiveness of the
BNN architecture proposed in Section 5 for
estimating uncertainty in NN outcomes and the
impact of the 𝑘𝑙
parameter from Equation (7).
The agent was trained exclusively on local data
during the experiment without exchanging
information with other agents. The visualization of
the training results is presented in Figure 4.
To generate outputs from the BNN, 50 queries
were made for each pair of input coordinates (𝑥,𝑦).
Subsequently, a visualization was created to illustrate
the mean values and standard deviations of the NN
responses.
It was observed that a low value of the 𝑘𝑙
parameter leads to a low variance in the NN’s results,
which does not allow for distinguishing the
"hallucinations" of the NN from areas with sufficient
data to form a general understanding of the
environment.
Conversely, a high 𝑘𝑙
parameter
Figure 4: Comparative visualization of single-agent uncertainty estimation.
(a) Mean, 𝑘𝑙
=10
(b) Mean, 𝑘𝑙
=5×10
(c) Mean, 𝑘𝑙
=5×10
(d) Standard deviation, 𝑘𝑙
=10
(e) Standard deviation, 𝑘𝑙
=5×10
(f) Standard deviation, 𝑘𝑙
=5×10
CLOSER 2024 - 14th International Conference on Cloud Computing and Services Science
316
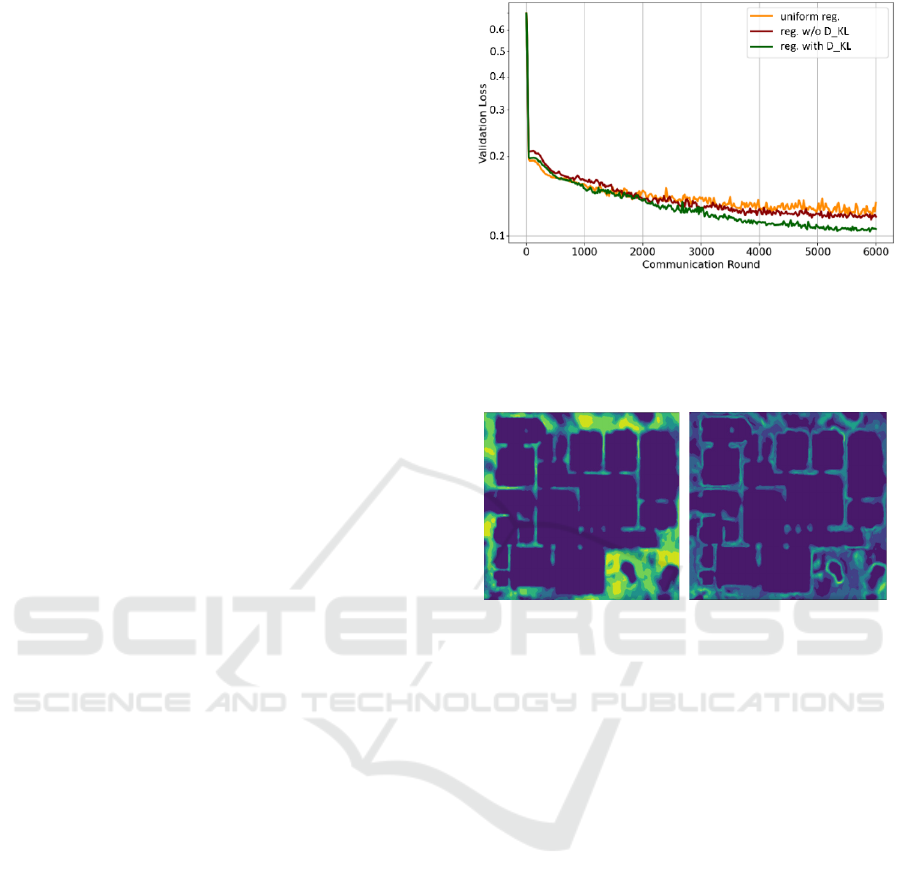
value results in excessive noise and a high degree of
uncertainty in the NN’s results. Therefore, to ensure
that the BNN provides an effective assessment of
uncertainty, fine-tuning of the 𝑘𝑙
parameter
during the training process is required.
6.2 Multi-Agent Uncertainty
Estimation
To assess the effectiveness of BNNs in estimating
uncertainty within distributed, decentralized learning
environments, a series of experiments were
conducted. These experiments aimed to evaluate the
impact of different regularization approaches on the
training quality of BNNs. The validation loss was
evaluated in the context of the following
regularization strategies:
Uniform L2 regularization of NN parameters
without making distinctions between parameter
types;
Separate regularization of conventional and BNN
parameters, applying L2 regularization for both;
Separate regularization of conventional and BNN
parameters, utilizing L2 regularization for
conventional parameters and Kullback–Leibler
divergence for Bayesian parameters (see
Algorithm 2).
The results of the evaluation are presented in Figure
5. We observe that applying Kullback–Leibler
divergence for parameter regularization (Algorithm
2) leads to a 12-30% decrease in the validation loss of
the distributed BNN training compared to other
regularization strategies. Additionally, this approach
enhances the stability of the training process. The
visualization of the outcome of decentralized BNN
training according to Algorithm 2 is presented in
Figure 6.
7 CONCLUSIONS
Within the scope of this paper, we addressed a
problem of uncertainty estimation within distributed
machine learning based on AI-enabled edge devices.
We set up a simulation of a collaborative mapping
problem using the Webots platform; introduced an
epoch-based decentralized consensus algorithm to
support the decentralized peer-to-peer exchange of
NN parameters among agents; and integrated
distributed uncertainty estimation into our models by
applying Bayesian neural networks.
Figure 5: Comparison of validation loss during distributed
BNN training 1) with uniform L2 regularization (uniform
reg.); 2) separate L2 regularization (reg. w/o D_KL); 3)
Kullback-Leibler divergence for regularization of BNN ρ-
parameters (reg. with D_KL).
(a) (b)
Figure 6: Visualization of the decentralized BNN training
results according to Algorithm 2: a) mean; b) standard
deviation.
Our experiments indicate that BNNs can
effectively support uncertainty estimation in a
distributed learning context. However, to ensure an
effective assessment of uncertainty by the BNN, we
highlighted the need for precise tuning of the learning
hyperparameters during training. We also determined
that applying Kullback–Leibler divergence for
parameter regularization resulted in a 12-30%
reduction in validation loss during the training of
distributed BNNs compared to other regularization
strategies.
For future work, we suggest exploring how
distributed learning with BNNs can be tailored for
embedded AI hardware. This would involve refining
the NN architecture to suit the resource constraints of
AI-enabled edge devices. We also plan to explore task
management and offloading strategies within the
multi-layered fog and hybrid edge-fog-cloud
environments to improve computational efficiency
and resource utilization.
Uncertainty Estimation in Multi-Agent Distributed Learning for AI-Enabled Edge Devices
317

ACKNOWLEDGMENTS
The research reported in this paper has been partly
funded by the European Union’s Horizon 2020
research and innovation program within the
framework of Chips Joint Undertaking (Grant No.
101112268). This work has been supported by Silicon
Austria Labs (SAL), owned by the Republic of
Austria, the Styrian Business Promotion Agency
(SFG), the federal state of Carinthia, the Upper
Austrian Research (UAR), and the Austrian
Association for the Electric and Electronics Industry
(FEEI).
REFERENCES
Abreha, H. G., Hayajneh, M., & Serhani, M. A. (2022).
Federated Learning in Edge Computing: A Systematic
Survey. In Sensors (Vol. 22, Issue 2).
Ahn, J. H., Simeone, O., & Kang, J. (2019). Wireless
Federated Distillation for Distributed Edge Learning
with Heterogeneous Data. IEEE International
Symposium on Personal, Indoor and Mobile Radio
Communications, PIMRC, 2019-September.
Belov, D. I., & Armstrong, R. D. (2011). Distributions of
the Kullback–Leibler divergence with applications.
British Journal of Mathematical and Statistical
Psychology, 64(2), 291–309.
Boyd, S. (2010). Distributed Optimization and Statistical
Learning via the Alternating Direction Method of
Multipliers (Vol. 3).
Claici, S., Yurochkin, M., Ghosh, S., & Solomon, J. (2020).
Model fusion with kullback-leibler divergence. 37th
International Conference on Machine Learning, ICML
2020, PartF168147-3.
Elgabli, A., Park, J., Bedi, A. S., Bennis, M., & Aggarwal,
V. (2020). GADMM: Fast and Communication
Efficient Framework for Distributed Machine
Learning. Journal of Machine Learning Research, 21.
Jospin, L. V., Laga, H., Boussaid, F., Buntine, W., &
Bennamoun, M. (2022). Hands-On Bayesian Neural
Networks—A Tutorial for Deep Learning Users. IEEE
Computational Intelligence Magazine, 17(2), 29–48.
Kalervo, A., Ylioinas, J., Häikiö, M., Karhu, A., & Kannala,
J. (2019). CubiCasa5K: A Dataset and an Improved
Multi-task Model for Floorplan Image Analysis.
Lecture Notes in Computer Science (Including
Subseries Lecture Notes in Artificial Intelligence and
Lecture Notes in Bioinformatics), 11482 LNCS, 28–40.
Koda, Y., Park, J., Bennis, M., Yamamoto, K., Nishio, T.,
Morikura, M., & Nakashima, K. (2020).
Communication-efficient multimodal split learning for
mmWave received power prediction. IEEE
Communications Letters, 24(6).
Kullback, S., & Leibler, R. A. (1951). On Information and
Sufficiency. The Annals of Mathematical Statistics,
22(1), 79–86.
Liang, Q., Hanafy, W. A., Ali-Eldin, A., & Shenoy, P.
(2023). Model-driven Cluster Resource Management
for AI Workloads in Edge Clouds. ACM Transactions
on Autonomous and Adaptive Systems, 18(1), 1–26.
Lim, W. Y. B., Luong, N. C., Hoang, D. T., Jiao, Y., Liang,
Y.-C., Yang, Q., Niyato, D., & Miao, C. (2020).
Federated Learning in Mobile Edge Networks: A
Comprehensive Survey. IEEE Communications
Surveys & Tutorials, 22(3), 2031–2063.
Nguyen, V. D., Chatzinotas, S., Ottersten, B., & Duong, T.
Q. (2022). FedFog: Network-Aware Optimization of
Federated Learning Over Wireless Fog-Cloud Systems.
IEEE Transactions on Wireless Communications,
21(10).
Park, J., Samarakoon, S., Elgabli, A., Kim, J., Bennis, M.,
Kim, S.-L., & Debbah, M. (2021). Communication-
Efficient and Distributed Learning Over Wireless
Networks: Principles and Applications. Proceedings of
the IEEE, 109(5), 796–819.
Parmar, V., Sarwar, S. S., Li, Z., Lee, H.-H. S., Salvo, B.
De, & Suri, M. (2023). Exploring Memory-Oriented
Design Optimization of Edge AI Hardware for
Extended Reality Applications. IEEE Micro, 43(6), 40–
49.
Samie, F., Tsoutsouras, V., Bauer, L., Xydis, S., Soudris,
D., & Henkel, J. (2016). Computation offloading and
resource allocation for low-power IoT edge devices.
2016 IEEE 3rd World Forum on Internet of Things
(WF-IoT), 7–12.
Wang, B., Dong, K., Zakaria, N. A. B., Upadhyay, M.,
Wong, W.-F., & Peh, L.-S. (2022). Network-on-Chip-
Centric Accelerator Architectures for Edge AI
Computing. 2022 19th International SoC Design
Conference (ISOCC), 243–244.
Yu, J., Vincent, J. A., & Schwager, M. (2022). DiNNO:
Distributed Neural Network Optimization for Multi-
Robot Collaborative Learning. IEEE Robotics and
Automation Letters, 7(2), 1896–1903.
CLOSER 2024 - 14th International Conference on Cloud Computing and Services Science
318
