
Study of Track Segmentation for Lap Time Optimization
Jaroslav Klap
´
alek
1,2 a
, Ond
ˇ
rej Benedikt
1 b
, Michal Sojka
2 c
and Zden
ˇ
ek Hanz
´
alek
2 d
1
Faculty of Electrical Engineering, Czech Technical University in Prague, Technick
´
a 2, 166 27 Prague, Czech Republic
2
Czech Institute of Informatics, Robotics and Cybernetics, Czech Technical University in Prague,
Jugosl
´
avsk
´
ych partyz
´
an
˚
u 3, 160 00 Prague, Czech Republic
Keywords:
Lap Time Optimization, Scaled-Down Autonomous Racing, F1Tenth, F1/10.
Abstract:
Lap time minimization is of interest in every automotive racing competition. However, finding an optimal
racing line is not a trivial task. In this work, we study one particular part of the racing line optimization
problem, namely the track segmentation problem. We analyze how different track segmentation methods
influence the racing line quality. Further, we present Automated Segmentation based on Curvature (ASC)
method, which creates segments adaptively according to the track layout. Using lap time estimation based on
a vehicle model, we compare ASC with two other methods from the literature. The preliminary results show
that optimization based on ASC is able to outperform the other tested approaches by up to 15 % for the given
number of iterations while converging to a good solution 3.88 times faster than the second-best method.
1 INTRODUCTION
The optimal racing line problem is of a common in-
terest in an automotive racing environment (Caleffi
et al., 2023). Its goal is to find a trajectory between
two points, ensuring a minimum driving time when
followed. On a closed circuit, this time is referred to
as lap time.
Lap time minimization is one of the main goals
of the International F1/10 Autonomous Racing Com-
petition (https://f1tenth.org/), a racing event for stu-
dent teams gathered from all around the world, uti-
lizing 1:10 scaled-down car models, so-called F1/10
cars (Agnihotri et al., 2020).
Many techniques exist to find an optimal racing
line, e.g., Evolution Strategies (O’Kelly et al., 2020),
Genetic Algorithms (Klap
´
alek et al., 2021), Model
Predictive Control (Heilmeier et al., 2020; Cataffo
et al., 2022), or one of the various machine learn-
ing methods (Evans et al., 2024). In (Braghin et al.,
2008), authors use a genetic algorithm to minimize
the following two criterions: (i) the path length so the
distance the car has to drive is the shortest (i.e., short-
est path), or (ii) the path curvature so that the max-
imum speed allowed by the surface friction is maxi-
a
https://orcid.org/0000-0001-8816-2773
b
https://orcid.org/0000-0002-7365-844X
c
https://orcid.org/0000-0002-8738-075X
d
https://orcid.org/0000-0002-8135-1296
mized (i.e., minimum curvature path).
Some of the above techniques rely on represent-
ing the racing track as a small number of disjoint
track segments, where each of them represents a unit
of optimization, thereby reducing the computational
complexity. The track segmentation can be applied
as follows. Each segment is associated with a single
waypoint. The racing line is represented efficiently
as an interpolation of a sequence of waypoints. Posi-
tion of the waypoints within the segments is typically
found by various optimization techniques (such as lo-
cal search or genetic algorithms). Note that there ex-
ists a trade-off between the number of segments and
the quality of the racing line. A large number of seg-
ments increase the solution space but slow the opti-
mization convergence, whereas a low number of seg-
ments reduce the quality of the racing line or even
make the problem unsolvable.
Specifically, the track segmentation approach
is used in the following works. Garlick and
Bradley (Garlick and Bradley, 2022) use it for train-
ing a neural network to find a racing line. In (Braghin
et al., 2008), the authors have segmented the track
equidistantly (meaning that the length of a segment
along the centerline is constant), whereas, in the work
of (Botta et al., 2012), the size of the segments was
inversely proportional to the curvature of the track.
In both works, the racing line waypoints were placed
on a line perpendicular to the centerline. We call this
452
Klapálek, J., Benedikt, O., Sojka, M. and Hanzálek, Z.
Study of Track Segmentation for Lap Time Optimization.
DOI: 10.5220/0012728600003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 452-455
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
line a cut and two consecutive cuts define a segment
in between. This way, each waypoint is defined by
its position in the sequence of segments and a single
scalar variable describing its position on the cut, as
can be seen in Fig. 1.
The exact way of segmenting the track likely in-
fluences the quality of the resulting racing line. How-
ever, the previous works did not study their relation
in great detail and instead used simple and straight-
forward approaches. In this work, we study the effect
of the track segmentation on the resulting racing line,
considering both the solution quality (lap time) and
computational effort (convergence of the algorithm).
Specifically, the contribution of this paper is as fol-
lows: (i) we propose a method called Automated Seg-
mentation based on the Curvature (ASC in short), and
(ii) we compare ASC to two other approaches pro-
posed in (Braghin et al., 2008) and (Botta et al., 2012),
respectively. We show that given the same number of
segments, our method is able to converge faster and
yields lower lap times.
2 METHODOLOGY
We compare three different methods for the track seg-
mentation: (i) uniform equidistant segmentation (UE)
based on (Braghin et al., 2008), (ii) uniform seg-
mentation with respect to the curvature (UC) based
on (Botta et al., 2012), and (iii) the Automated Seg-
mentation based on the Curvature (ASC) method pro-
posed in this work.
Considering the UE method, the quality of the rac-
ing line depends on the position of the initial segment.
Thus, we evaluate multiple variants by moving the
segments on the track along the centerline by α · ∆,
where α ∈ {0 %,10%, .. . , 90 %} represents the shift
and ∆ is the length of the segment. We denote the
method as UEα.
The UC method samples the cuts on the track uni-
formly with respect to the curvature, i.e. it places
more cuts at the corners and less in the straight sec-
tions. However, to obtain a sufficient number of cuts
in the straight sections, this method results in an un-
necessarily high number of segments in the turns. We
argue that the worse performance of the UC (in com-
parison to the UE-like approach as presented in (Botta
et al., 2012)) was caused by a large number of seg-
ments in turns.
Similarly to UC, our ASC method places cuts
based on track curvature. Contrary to the prior work,
we generally divide the track into less segments. The
ASC method works as follows: (i) positive and nega-
tive peaks on the curvature are found and populated
Problematic
“S-turn”
segments
cut
waypoint
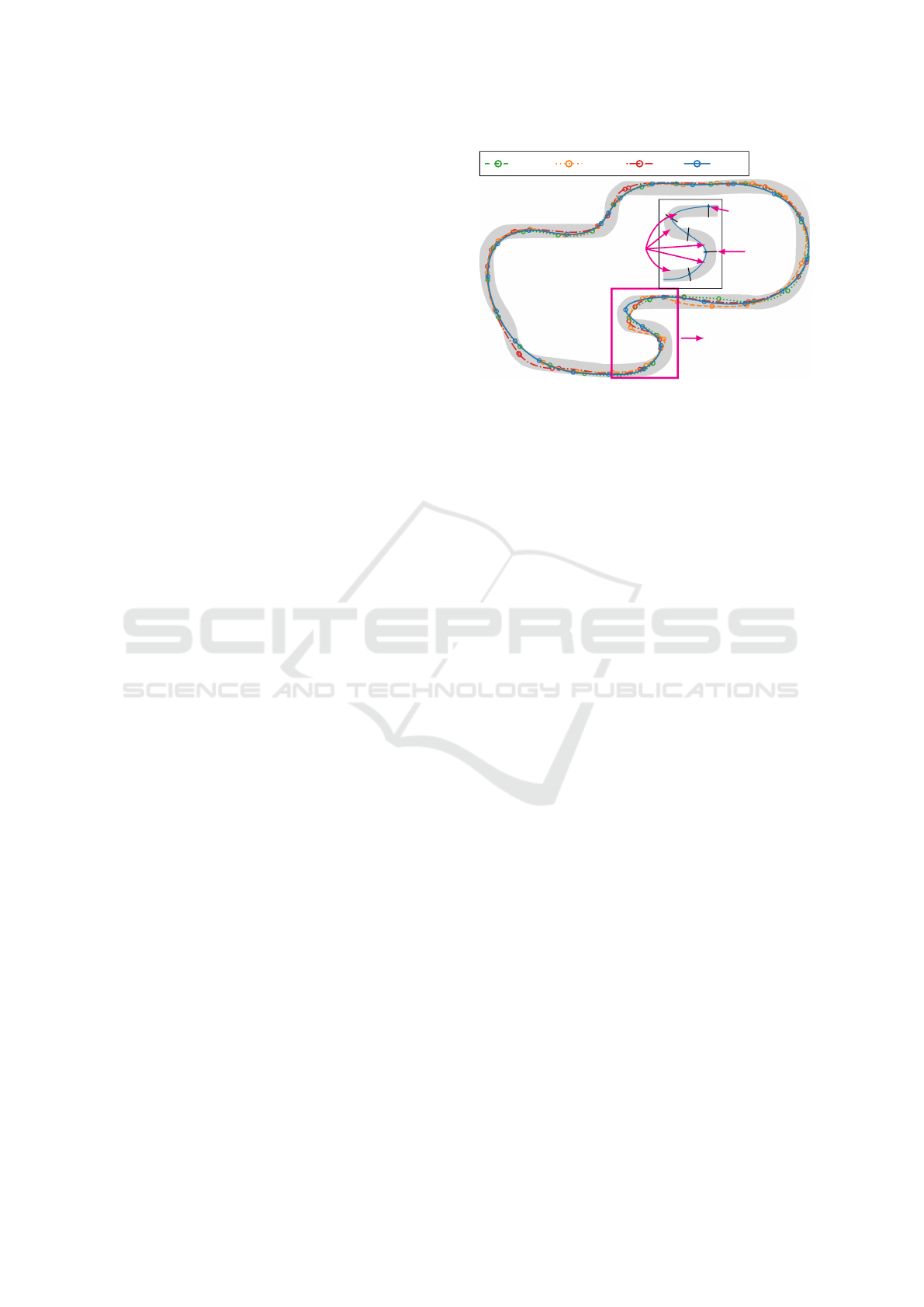
UE20 UE40 UC ASC
Figure 1: Ruudskogen map from TORCS (Wymann et al.,
2014) with racing lines of selected methods and their way-
points, along with an illustration of segments, cuts, and
waypoints.
by cuts, (ii) close cuts are merged to avoid redun-
dancy, (iii) long cut-less sections of the track are arti-
ficially filled with equidistant cuts, (iv) sections of the
track between two consecutive cuts where the sign of
the curvature changes are populated with additional
cuts, and (v) close cuts are filtered out once again.
Therefore, the method segments the track automat-
ically given the following parameters: threshold of
curvature peaks, minimum distance between two cuts,
and distance between cuts in the straight sections.
All the tested methods segment the track differ-
ently. To find the waypoints given the segmenta-
tion, we use a genetic algorithm powered by Never-
grad (Rapin and Teytaud, 2018). Note that the partic-
ular choice of the optimization technique is not that
important, as any other optimization technique can
be used instead. To get the racing line, we interpo-
late found waypoints by a cubic spline as presented
in (Braghin et al., 2008). Finally, to evaluate the lap
time t
lap
given the racing line, we use a sequential
two-step algorithm (Kapania et al., 2016). This al-
gorithm computes a velocity profile using a dynamic
bicycle model (with parameters suitable for an F1/10
car) to maximize the vehicle speed at any given point
while not exceeding the maximum permissible vehi-
cle speed (which depends on friction and the racing
line curvature with a corresponding centripetal force)
and acceleration limits.
We perform the experimental evaluation on the
Ruudskogen map from TORCS (Wymann et al.,
2014) shown in Fig. 1. The track is scaled by a factor
of 1/10 to match the environment of the F1/10 com-
petition. To ensure a fair comparison, the number of
segments is fixed to 26. All of the tested methods
(UE0, UE10, . . . , UE90, UC, ASC) are executed three
times, each time with a limit of 10,000 iterations (bud-
Study of Track Segmentation for Lap Time Optimization
453

get parameter of Nevergrad). The repeated evaluation
is performed in order to mitigate the non-determinism
of the optimizer.
3 RESULTS
The results of the experiments are shown in Fig. 2,
illustrating the relation between the iteration num-
ber and best-so-far solutions found by the respective
methods. Each data line represents the average of
the three runs, with the filled area showing the stan-
dard deviation. Lap times achieved after 10,000 iter-
ations are shown in the legend. Results for methods
UE50, . . . , UE90 are not presented since no feasible
racing line was found in any of the runs. A racing line
is infeasible if any part of it lies outside of the track.
Note that the large standard deviation of the UC is
caused by a large number of segments in the turns,
which has a diverse impact on the optimizer conver-
gence.
From Fig. 2 we conclude that ASC surpasses the
best-performing variant of UE method (UE20) by
0.24 s (0.88 %) and UC by 3.49 s (11.47 %). Even
though the difference between ASC and UE20 is not
particularly high, note that UE20 is one of the possi-
ble rotations of UE method, while the success of indi-
vidual rotations is a priori unknown.
The highest differences are most apparent in the
early iterations. For example, after the first 500 it-
erations, using the ASC yields lap time that is 0.84 s
(2.92 %) better than UE20, and 5.18 s (15.64 %) bet-
ter than UC.
Figure 1 shows the racing lines for ASC, UE20,
UE40, and UC methods. The most challenging part is
the “S-turn” in the bottom part of the track, where cuts
at inconvenient places negatively affects the lap time.
Detailed view of the “S-turn” and how the selection
of cuts influences a set of possible trajectories consid-
ered by the optimization algorithm is shown in Fig. 3.
For example, we can see that the solution space of
UE60 has only a small overlap with the track in the
0 1,000 2,000 3,000 4,000 5,000 6,000 7,000 8,000 9,000 10,000
27
28
29
30
31
32
33
34
35
number of iterations [–]
t
lap
[s]
UE0 (27.53 ± 0.14 s) UE40 (28.12 ± 0.15 s)
UE10 (27.56 ± 0.16 s) UC (30.45 ± 1.02 s)
UE20 (27.20 ± 0.12 s) ASC (26.96 ± 0.19 s)
UE30 (27.57 ± 0.10 s)
Figure 2: Comparison of tested methods, an average lap
time is shown, along with the standard deviation repre-
sented as a filled area.
Table 1: Average number of iterations for given lap time.
t
lap
[s] ASC UE0 UE10 UE20 UE30 UE40 UC
32.00 1 1 1 1 1 442 1,014
31.00 28 227 27 42 106 659 2,607
30.00 64 378 142 161 212 1,041 –
29.00 144 518 295 361 387 1,721 –
28.00 457 1,776 787 1,094 1,210 – –
27.70
798 3,418 2,470 2,099 2,361 – –
27.40 1,434 – – 3,700 – – –
27.20 2,542 – – 9,872 – – –
27.00 9,160 – – – – – –
(a) UE20. (b) UE60. (c) UC. (d) ASC.
Figure 3: Cuts and solution spaces (dotted areas) of selected
methods. The resulting racing line of each method has to lie
in its solution space.
top part, which results in all potential solutions being
infeasible. A racing line, which is feasible in the top
left segment will be infeasible in the segment below it
and vice versa.
Finally, Table 1 shows the average number of it-
erations needed to achieve certain lap times for the
tested methods. Note that only ASC is able find to the
best lap time under 27 s. In addition, ASC reaches the
lap time of 27.2 s almost 4 times faster than UE20.
4 CONCLUSION AND FUTURE
WORK
Lap time minimization is a common problem in rac-
ing competitions, and it strongly correlates with the
quality of the racing line. In this paper, we studied the
effects of track segmentation on racing line optimiza-
tion. This preliminary study revealed the flaws of the
previously used methods. Specifically, the uniform
equidistant segmentation (UE) method may not adapt
to the properties of the track, while the uniform seg-
mentation with respect to the curvature (UC) method
suffers from its dependency on the curvature smooth-
ness.
We proposed the Automated Segmentation based
on the Curvature (ASC) method overcoming these
flaws and improving both the optimization conver-
gence and the solution quality.
In the future, we plan to test ASC also on other
tracks. Moreover, we plan to make the selection of
various ASC parameters fully automatic and to vali-
date it experimentally on a real F1/10 car. Besides, we
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
454

want to test the effect of different interpolation func-
tions (such as the B
´
ezier curve). We believe that this
study shows the high potential of adaptive track seg-
mentation.
ACKNOWLEDGEMENTS
This work was supported by the Grant Agency of
the Czech Technical University in Prague, grant No.
SGS22/167/OHK3/3T/13 and co-funded by the Euro-
pean Union under the project ROBOPROX (reg. no.
CZ.02.01.01/00/22 008/0004590).
REFERENCES
Agnihotri, A., O’Kelly, M., Mangharam, R., and Abbas,
H. (2020). Teaching Autonomous Systems at 1/10th-
scale: Design of the F1/10 Racecar, Simulators and
Curriculum. In Proceedings of the 51st ACM Tech-
nical Symposium on Computer Science Education,
SIGCSE ’20, pages 657–663, New York, NY, USA.
Association for Computing Machinery.
Botta, M., Gautieri, V., Loiacono, D., and Lanzi, P. L.
(2012). Evolving the optimal racing line in a high-end
racing game. In 2012 IEEE Conference on Computa-
tional Intelligence and Games (CIG), pages 108–115.
ISSN: 2325-4289.
Braghin, F., Cheli, F., Melzi, S., and Sabbioni, E.
(2008). Race driver model. Computers & Structures,
86(13):1503–1516.
Caleffi, F., Rodrigues, L. d. S., Stamboroski, J. d. S., Rorig,
B. V., Santos, M. M. C. d., Zuchetto, V., and Raguz-
zoni,
´
I. B. (2023). A systematic review of hardware
technologies for small-scale self-driving cars. Ci
ˆ
encia
e Natura, 45(esp. 1):84071.
Cataffo, V., Silano, G., Iannelli, L., Puig, V., and Glielmo,
L. (2022). A Nonlinear Model Predictive Control
Strategy for Autonomous Racing of Scale Vehicles.
In 2022 IEEE International Conference on Systems,
Man, and Cybernetics (SMC), pages 100–105.
Evans, B. D., Trumpp, R., Caccamo, M., Jordaan, H. W.,
and Engelbrecht, H. A. (2024). Unifying f1tenth au-
tonomous racing: Survey, methods and benchmarks.
arXiv:2402.18558.
Garlick, S. and Bradley, A. (2022). Real-time optimal tra-
jectory planning for autonomous vehicles and lap time
simulation using machine learning. Vehicle System
Dynamics, 60(12):4269–4289.
Heilmeier, A., Wischnewski, A., Hermansdorfer, L., Betz,
J., Lienkamp, M., and Lohmann, B. (2020). Min-
imum curvature trajectory planning and control for
an autonomous race car. Vehicle System Dynamics,
58(10):1497–1527.
Kapania, N. R., Subosits, J., and Christian Gerdes, J.
(2016). A Sequential Two-Step Algorithm for Fast
Generation of Vehicle Racing Trajectories. Jour-
nal of Dynamic Systems, Measurement, and Control,
138(9):091005.
Klap
´
alek, J., Nov
´
ak, A., Sojka, M., and Hanz
´
alek, Z.
(2021). Car racing line optimization with genetic
algorithm using approximate homeomorphism. In
2021 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 601–607.
O’Kelly, M., Zheng, H., Jain, A., Auckley, J., Luong, K.,
and Mangharam, R. (2020). Tunercar: A superopti-
mization toolchain for autonomous racing. In 2020
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 5356–5362.
Rapin, J. and Teytaud, O. (2018). Nevergrad
- A gradient-free optimization platform.
https://GitHub.com/FacebookResearch/Nevergrad.
Wymann, B., Espi
´
e, E., Guionneau, C., Dimitrakakis, C.,
Coulom, R., and Sumner, A. (2014). TORCS, The
Open Racing Car Simulator. http://www.torcs.org.
Study of Track Segmentation for Lap Time Optimization
455
