
Geographical Self-Organizing Map Clustering in Large-Scale Urban
Networks for Perimeter Control
Maha Elouni
1 a
, Hesham A. Rakha
2 b
, Monica Menendez
3 c
and Hossam M. Abdelghaffar
3,4 d
1
Department of Computer Science, Randolph-Macon College, Ashland, Virginia, U.S.A.
2
Charles E. Via, Jr. Dept. of Civil and Environmental Engineering, Virginia Tech, Blacksburg, Virginia, U.S.A.
3
Division of Engineering, New York University Abu Dhabi, Abu Dhabi, U.A.E.
4
Department of Computer Engineering and Systems, Faculty of Engineering, Mansoura University, Mansoura, Egypt
Keywords:
GeoSOM, Neural Network, Clustering, Traffic Congestion, Perimeter Control.
Abstract:
Traffic congestion in urban areas presents a major challenge to efficient transportation systems. Recent ad-
vancements in traffic management provide promising solutions, with perimeter control emerging as a tech-
nique to tackle network-wide congestion. However, it is crucial to identify geographically connected homo-
geneously congested areas for effective implementation. This research explores the application of clustering
techniques, particularly geographical self-organizing maps (GeoSOM), to identify spatially connected and ho-
mogeneously congested areas within transportation networks. While GeoSOM has found applications across
various domains, its adaptation to transportation networks for congestion clustering is novel. This study intro-
duces and implements an adaptation of the GeoSOM algorithm tailored for the large-scale urban environment
of downtown Los Angeles. Its performance is assessed through a comparative evaluation with two other clus-
tering algorithms, namely DBSCAN and K-means. The results demonstrate that GeoSOM surpasses other
clustering algorithms, exhibiting improvements of up to 43% in traffic density variance, up to 61% in the
spatial quantization error, and 15% in the quantization error. This finding demonstrates that the proposed
clustering algorithm is effective in identifying a spatially homogeneous congested area within a large-scale
transportation network.
1 INTRODUCTION
Traffic congestion has become a prevalent issue in
many urban areas. Recent advances in traffic man-
agement and control techniques have proven effective
in addressing this issue and increasing the efficiency
of urban transport systems. Evaluating traffic con-
gestion patterns across metropolitan road networks
is critical for effective traffic management. This as-
sessment allows researchers to accurately determine
the operational status of network traffic, such as con-
gested routes. Perimeter control is a promising tech-
nique for reducing traffic congestion across networks
rather than considering individual routes (Bichiou
et al., 2020). Identifying geographically connected
homogeneously congested regions within transporta-
a
https://orcid.org/0000-0002-4719-4987
b
https://orcid.org/0000-0002-5845-2929
c
https://orcid.org/0000-0001-5701-0523
d
https://orcid.org/0000-0003-4396-5913
tion networks is critical for implementing this perime-
ter control technique (Lukas Amb
¨
uhl, 2023). The
identification of such regions is the objective of this
research effort.
Technological developments in database manage-
ment and data mining have simplified the handling of
spatial data and allowed for the identification of intri-
cate connections, patterns, and attributes (Henriques
et al., 2012). Clustering is one way to solve prob-
lems presented by large databases. It consists of di-
viding the data into groups of related objects, using
machine learning algorithms (Kim et al., 2023). The
K-means clustering approach is widely used in studies
that employ regional cluster analysis to classify im-
portant variables found in urban and rural areas (Ran
et al., 2021; Kim et al., 2014). The K-means clus-
tering method provides the benefit of reducing and
displaying high-dimensional data, however, it does
not take topological factors into account (Kim et al.,
2023).
The concept of self-organizing maps (SOM), often
Elouni, M., Rakha, H., Menendez, M. and Abdelghaffar, H.
Geographical Self-Organizing Map Clustering in Large-Scale Urban Networks for Perimeter Control.
DOI: 10.5220/0012729300003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 465-472
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
465

referred to as self-organizing feature maps (SOFM),
was introduced by Kohonen (Kohonen, 2013). SOM
involves the mapping of an input space onto a lower-
dimensional output space composed of units known
as neurons, forming the basis of this idea. The in-
put space’s topology is maintained by this mapping.
This implies that neurons nearby are mapped to in-
puts nearby as well, and vice versa. Particularly in
high dimensional spaces, it is an extremely helpful
tool for understanding the data structure (Pires et al.,
2007). SOM is essentially a data-driven technique for
data compression and dimensionality reduction. It is
frequently utilized for data clustering and graph min-
ing. Numerous applications use SOM including ob-
ject recognition, learning a motion map, image seg-
mentation, density modeling, gene expression analy-
sis, object classification, skin detection, robot behav-
ior learning, text mining, and information manage-
ment (Le Thi and Nguyen, 2014).
Although SOM is extensively utilized in cluster-
ing tasks, it typically does not consider geographic
location. In clustering geo-referenced data, Baccao et
al. (Bac¸
˜
ao et al., 2005) emphasized how crucial it is
to take physical locations into account. “Everything
is related to everything else, but near things are more
related than distant things,” according to the first law
of geography, which they referenced (Waters, 2017).
This implies that even if two parts are identical in ev-
ery other way, they shouldn’t be grouped if they are
far apart geographically. To incorporate geographi-
cal features into the SOM clustering, two approaches
were investigated by Baccao et al. With one approach,
they added geographic coordinates to the input vec-
tors and assigned them a high weight to indicate their
significance. With the second approach they created
a new architecture called Geographical SOM (Geo-
SOM) (Bac¸
˜
ao et al., 2004).
SOM and GeoSOM are used in various clustering
applications including forest management (Kim et al.,
2023), illness spreading patterns (Melin et al., 2020),
tourism patterns (Provenzano and Giambrone, 2023),
and water quality studies (Feng et al., 2023). How-
ever, as far as we are aware, they have never been ap-
plied to transportation network clustering, where the
deployment of traffic controllers to alleviate conges-
tion requires spatially connected and homogeneously
congested clusters.
Therefore, in this research, the objective is to iden-
tify a homogenously congested area using the Geo-
SOM algorithm within a large-scale network, specifi-
cally the Los Angeles (LA) downtown. Additionally,
the effectiveness of the proposed GeoSOM algorithm
will be evaluated through comparison with two well-
known clustering algorithms, namely, DBSCAN and
K-means (Wulandari et al., 2024).
The paper is structured as follows: Section 2 de-
scribes the GeoSOM algorithm. Section 3 presents
the LA case study and the simulation configuration.
Section 4 performs a sensitivity analysis of the Geo-
SOM algorithm to determine the best set of parame-
ters. Section 5 evaluates the effectiveness of GeoSOM
by comparing it to DBSCAN and K-means clustering
algorithms. Finally, Section 6 discusses the conclu-
sions drawn from the study and future work.
2 GeoSOM ALGORITHM
The SOM is a competitive learning-based artificial
neural network (Kohonen, 2013). It operates by com-
puting the degree of similarity between the weights
of each neuron and the input vector. The neuron
whose weights most closely resemble the input vec-
tor is designated as the winning neuron, often referred
to as the best matching unit (BMU). Subsequently,
the neighborhood of the winning neuron is adjusted
closer to the input vector through the updating of neu-
ron weights.
The primary distinction between GeoSOM and
SOM lies in their two-stage BMU search process. In
GeoSOM, a geographical BMU (geoBMU) is initially
identified, where the search relies solely on the ge-
ographic locations of neurons (Bac¸
˜
ao et al., 2004).
The geoBMU is the neuron closest to the input vec-
tor in terms of geography. In the subsequent stage,
non-geographical features are considered to select the
final BMU, which is located within a defined ra-
dius (R) of the geoBMU. This radius, denoted as the
geographical tolerance, limits the neighboring units
within physical proximity to the input vector as the
only contenders for becoming a BMU.
The set of N input vectors is represented as X.
Each input vector X is structured as X = [x
geo
,x
att
],
where x
att
represents the non-geographical attributes
of the input, and x
geo
denotes the geographical coor-
dinates. In our specific context, the non-geographical
attribute refers to the densities (k) of roads, indicating
the number of vehicles per unit distance and serving
as a metric for road congestion.
Let G denote a grid consisting of N
neu
neurons
with weights W , where W = [w
geo
,w
att
] represents
the weight of each neuron. Here, w
att
represents the
non-geographical weights, while w
geo
represents the
geographical weights. Initially, W is randomly se-
lected. The GeoSOM algorithm, outlined in Algo-
rithm 1, comprises three stages:
• Competition. Neurons compete to determine the
best matching unit (BMU), striving to be the clos-
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
466
est to the input.
• Collaboration. By stimulating its surround-
ing neurons through the neighborhood function
h
BMU
f inal
, j
(t) often modeled as a Gaussian func-
tion, the BMU shares its success with them. Ini-
tially, the degree of collaboration is strong, but it
diminishes over time. The neighborhood function
is defined as follows:
h
BMU
f inal
, j
(t) = exp
−
||r
BMU
f inal
− r
j
||
2
2σ(t)
2
where r
BMU
f inal
and r
j
denote the positions of the
BMU
f inal
and the neuron j on the neurons’ grid,
respectively, and σ(t) is the radius of the neigh-
borhood, and it decreases with time.
• Weight Update. Neurons adjust their weights to-
wards the input vector through a weight update
process guided by a decreasing learning rate α(t)
with time.
initialize α(1), σ(1), w(1), TrainingSteps, R ;
for t = 1 : TrainingSteps do
for i = 1 : N do
BMU
geo
= argmin
j
(x
i,geo
− w
j,geo
) ;
S
R
:= {neuron :
||w
neuron
geo
− w
BMU
geo
|| < R} ;
BMU
f inal
=
argmin
neuron∈S
R
||x
i,att
− w
neuron
att
||
;
for j = 1 : N
neu
do
h
BMU
f inal
, j
(t) = e
−∥|r
BMU
f inal
−r
j
||
2
2σ(t )
2
w
j
(t +1) = w
j
(t) +
α(t)h
BMU
f inal
, j
(t)
x
i
− w
j
(t)
;
end
end
update α(t) = α(1) ∗ e
−t/TrainingSteps
;
update σ(t) = σ(1) ∗ e
−t/TrainingSteps
end
Algorithm 1: GeoSOM Algorithm.
3 CASE STUDY: NETWORK
DESCRIPTION AND
SIMULATION SETUP
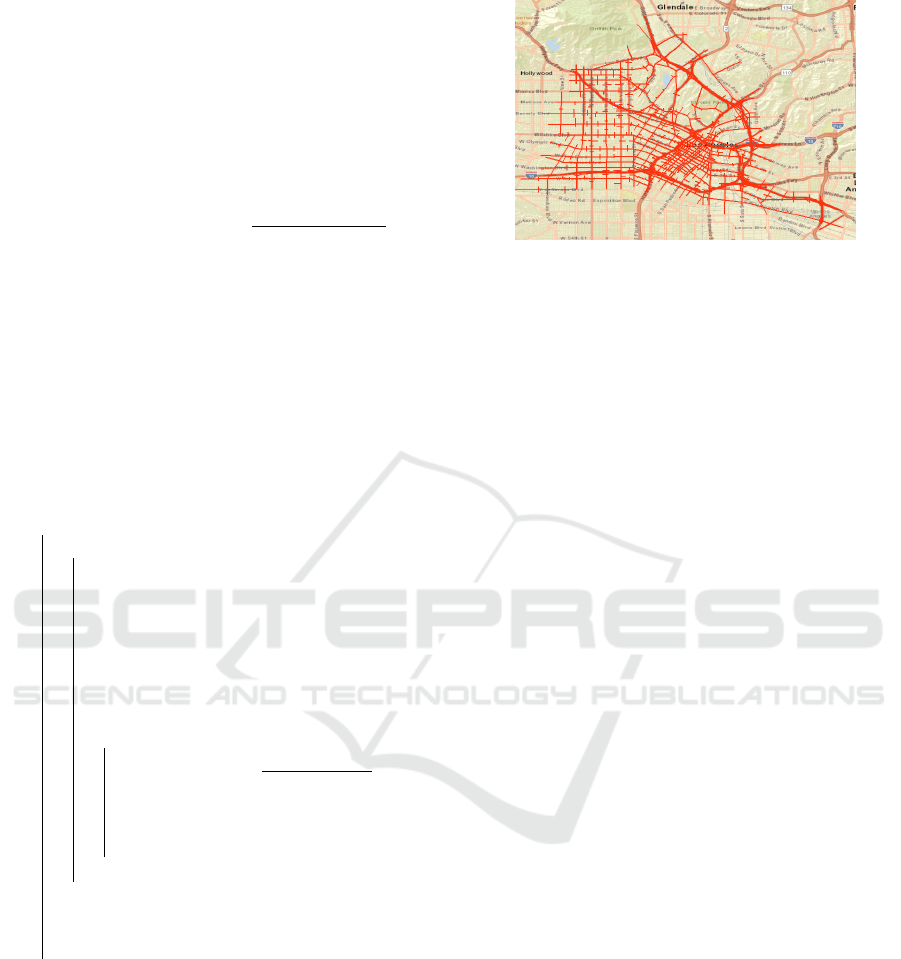
The real-life Los Angeles (LA) downtown network
shown in Figure 1 is a large-scale network composed
of 3,556 links (Abdelghaffar and Rakha, 2019). It is
characterized by congested traffic, long travel times,
Figure 1: Downtown Los Angeles network.
and frequent delays. To alleviate the congestion, our
ultimate goal is to apply the network perimeter control
strategy in the congested region (Elouni et al., 2021).
For the control system to function properly, the area
where it will be implemented must exhibit homoge-
neous congestion. In other words, a densely homo-
geneous area that is geographically connected must
be located. Therefore, the GeoSOM algorithm is de-
ployed across the network, considering both the link
densities and their geographic locations, to achieve
this objective.
Every network link is characterized by two fea-
tures: its density (k), considered a non-geographical
feature, and its midpoint location, represented by x
and y coordinates, considered a geographical feature.
To prevent any feature from being weighted more than
the others, x, y, and k are normalized to values be-
tween 0 and 1.
Throughout the simulation, the neuron weights are
updated until they converge to a state where either the
change becomes minimal or ceases altogether. Then,
the distances between each neuron and its neighbor-
ing neurons are computed using the unified distance
matrix, commonly referred to as the U-matrix (Hamel
and Brown, 2011). Neurons are grouped into the same
clusters when the distances between them are rela-
tively small, while cluster boundaries are delineated
by larger distances between neurons. To define a color
code for each network link, the U-matrix results are
projected and interpolated into the input space. Based
on these colors, the clusters are then visually identi-
fied.
4 SENSITIVITY ANALYSIS
The objective of this research is to identify a heavily
congested homogeneous area to manage congestion
within it. In evaluating GeoSOM’s effectiveness, our
emphasis was on identifying a specific area charac-
terized by a high volume of vehicles, i.e., high traffic
Geographical Self-Organizing Map Clustering in Large-Scale Urban Networks for Perimeter Control
467
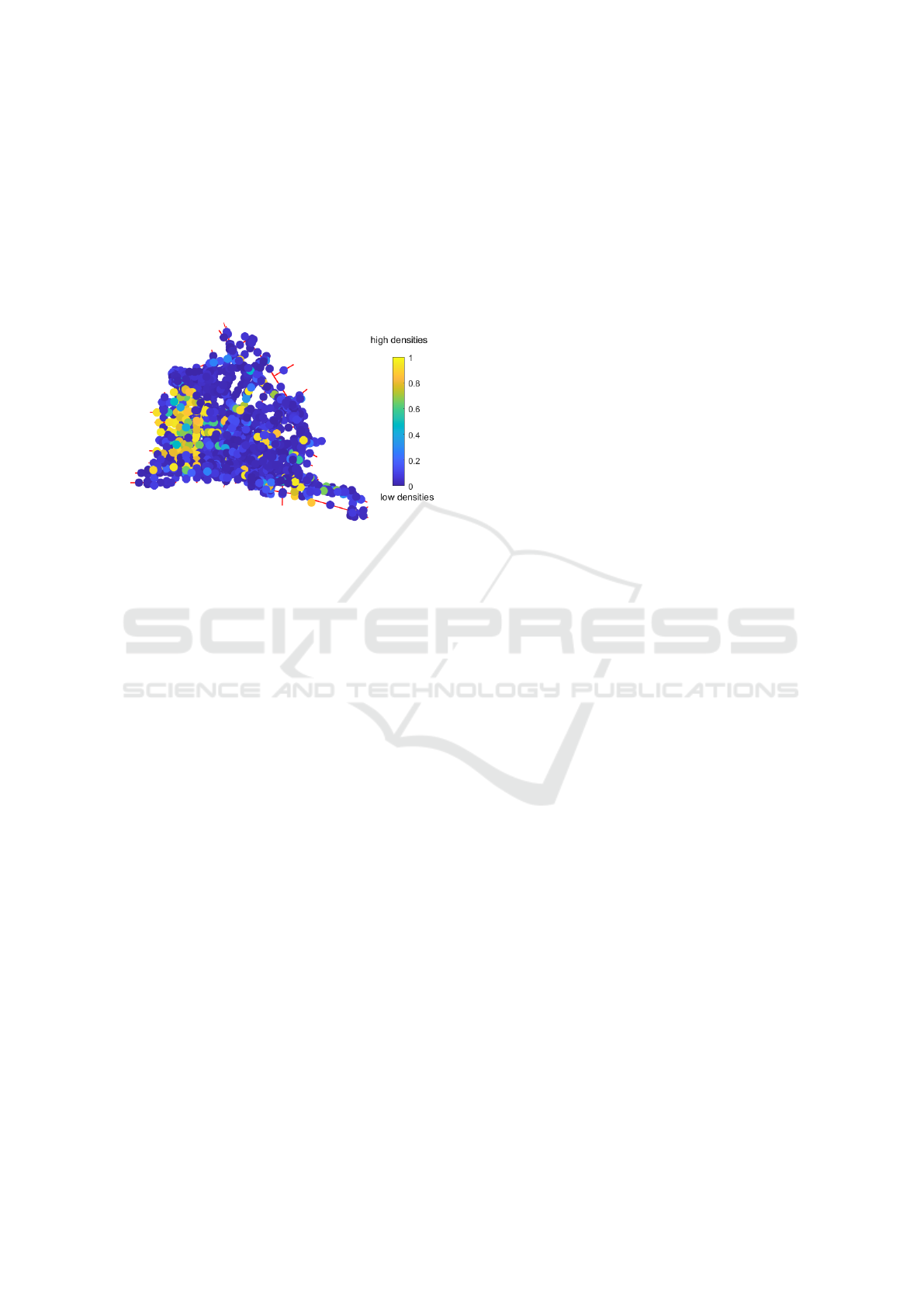
density. The peak density observed in the LA real
traffic volume during rush hour is represented by the
yellow zone in Figure 2.
GeoSOM operates on artificial neural networks
and encompasses multiple parameters that necessi-
tate fine-tuning. These parameters include the number
of neurons, the learning rate, and geographical toler-
ance. The best configuration is determined through a
sensitivity analysis, as presented below.
Figure 2: LA real link densities.
4.1 Number of Neurons
GeoSOM was executed with varying numbers of neu-
rons, ranging from a 5×5 to a 25×25 grid, on the LA
network. Figure 3 depicts three cases, corresponding
to grid sizes of 5 × 5, 15 × 15, and 25 × 25, respec-
tively, from left to right.
Figure 3a illustrates the neurons’ grid at the end of
the simulation, following Algorithm 1. Meanwhile,
Figure 3b displays a color-coded interpolation of the
neurons’ weights onto the network links. Blue indi-
cates similar densities among the links, implying they
could potentially be clustered together, whereas yel-
low indicates a notable disparity in densities, imply-
ing they should not be clustered together. The left-
most plot in Figure 3a shows that the neurons did
not adequately cover the map, implying that a 5 × 5
neuron configuration is inadequate. Furthermore, the
outcome for the 25 × 25 neuron configuration, as de-
picted in Figure 3b, reveals that all the links are
grouped into only a single large cluster. Therefore,
25 × 25 neurons are ineffective. Figure 3 shows that
the best number of neurons is 15 × 15. The neuron
grid efficiently covers the network, as evidenced by
the middle plot in Figure 3a, and it also effectively
achieves homogeneous clusters, as indicated by the
dark blue color with clear light color boundaries in
the middle plot of Figure 3b.
4.2 Learning Rate
In this section, various learning rates (α) were exper-
imented within the GeoSOM algorithm. As α falls
between 0 and 1, the tested values ranged between
0.05 to 0.8. Figure 4 shows GeoSOM results for three
different α values. It is evident that for small α values
(e.g., α = 0.05), the homogeneous regions, character-
ized by a dark blue color, are quite small, which may
not be optimal for the control objective. Conversely,
with a high α value (e.g., α = 0.8), the network is
consolidated into a single cluster. The best α value
appears to be 0.4, where a well-defined homogeneous
dark blue area is discernible with clear distinct bor-
ders, exhibited by yellow and green colors, making it
more suitable for control purposes.
4.3 Geographical Tolerance
This section investigates the impact of geographical
tolerance (R) on GeoSOM results, with low R values
indicating that geographical attributes are prioritized
and higher R values indicating a preference for non-
geographical attributes over geography. The R values
tested with the GeoSOM algorithm ranged between 0
and 8.
Figure 5 illustrates that for R = 0, the clustering
results did not yield a homogeneous dark blue area.
As R increases, the dark blue area expands. A well-
defined cluster emerged when R = 5. However, as
the geographical tolerance increases to R = 8, cluster
borders start to blur, and all links are grouped into a
single cluster.
4.4 Sensitivity Analysis Conclusion
The best configuration for the GeoSOM clustering al-
gorithm is identified as 15 × 15 neurons, α = 0.4, and
R = 5. Within the various homogeneous areas de-
picted by the dark blue color in Figure 6, the area of
primary interest is the one with the highest mean den-
sity, representing the most congested area, as illus-
trated in Figure 2, and depicted by the black contour
in Figure 6.
5 COMPARING GeoSOM TO
OTHER CLUSTERING
ALGORITHMS
In this Section, the GeoSOM algorithm is compared
with two other widely used clustering techniques:
DBSCAN and K-means, to evaluate its performance.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
468
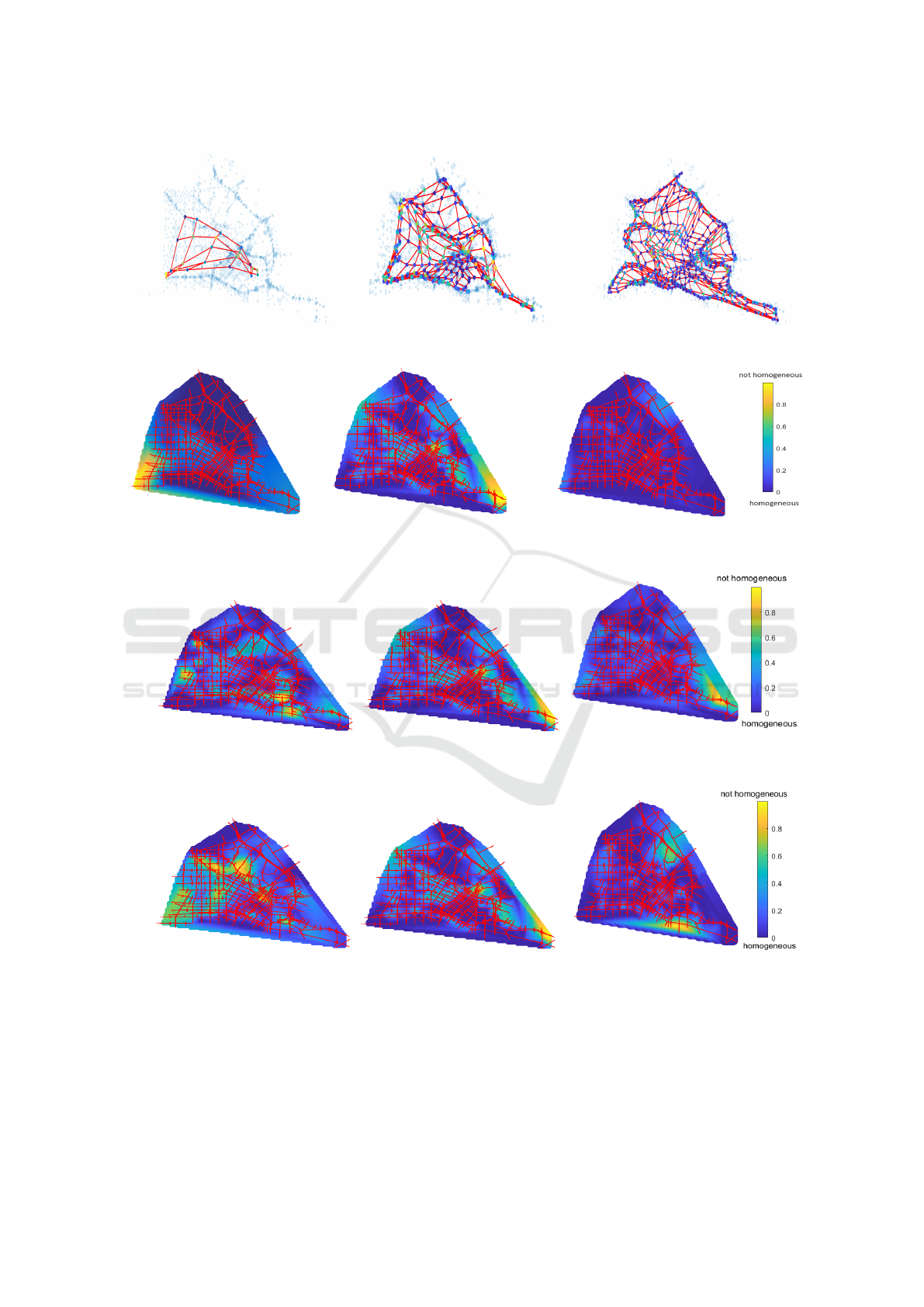
(a) Grid of neurons.
(b) Color-coded distances between the network links.
Figure 3: GeoSOM with different number of neurons; from left to right, 5 × 5, 15 × 15 and 25 × 25.
(a) α = 0.05. (b) α = 0.4. (c) α = 0.8.
Figure 4: GeoSOM maps for various α.
(a) R=0. (b) R=5. (c) R=8.
Figure 5: GeoSOM maps for various R.
While these two methods have been employed in the
literature for clustering transport networks, they lack
the explicit incorporation of geographical data, a fea-
ture inherent in GeoSOM (Lopez et al., 2017; Lin and
Xu, 2020).
5.1 DBSCAN
The density-based spatial clustering algorithm (DB-
SCAN) (Sahu et al., 2023) clusters points based on
their proximity to neighboring points. It relies on two
key parameters: ε, representing the radius of a neigh-
Geographical Self-Organizing Map Clustering in Large-Scale Urban Networks for Perimeter Control
469
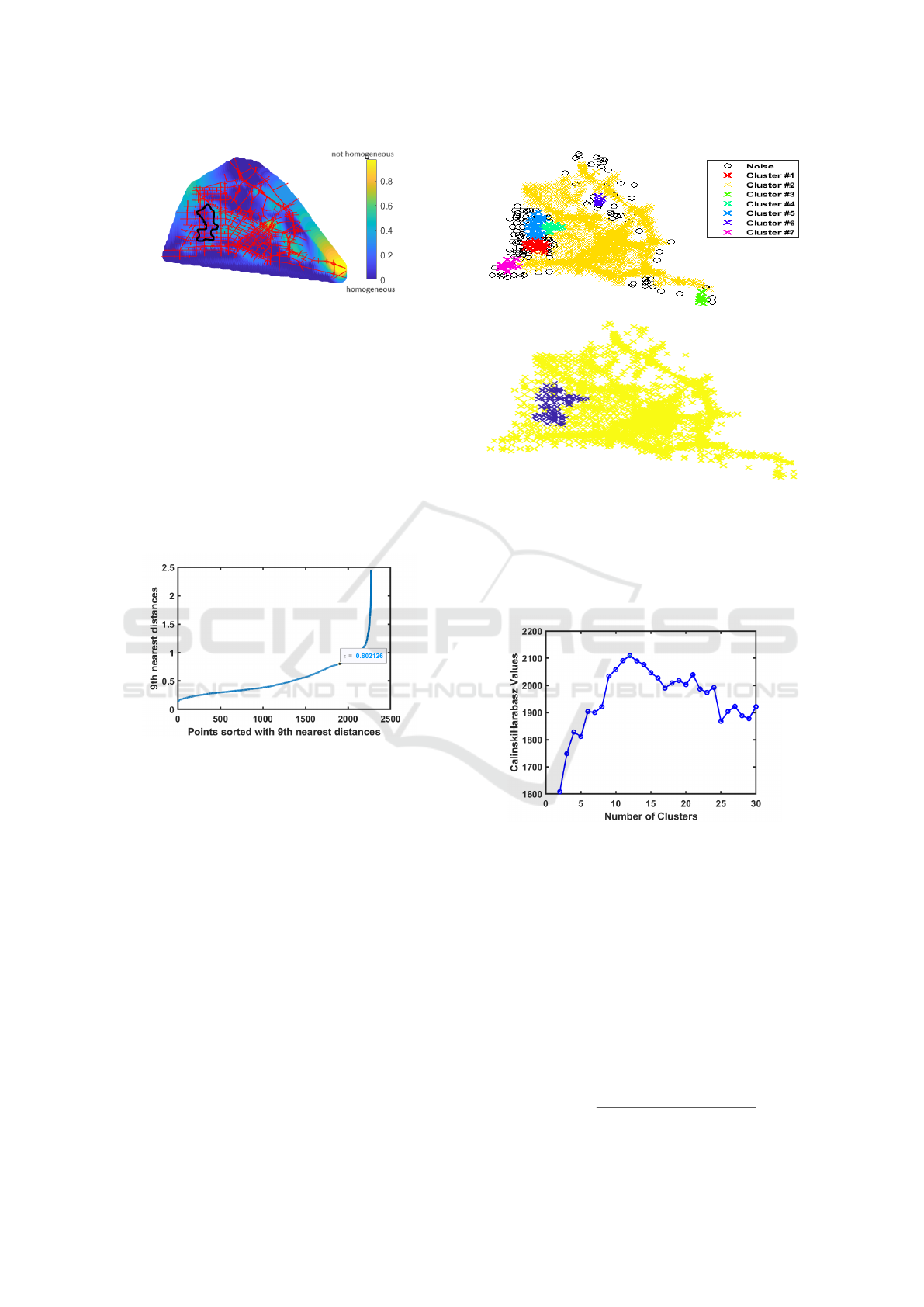
Figure 6: GeoSOM cluster identification using best config-
uration.
borhood relative to a point, and minPts, which speci-
fies the minimum number of points needed to consti-
tute a dense region, i.e., the minimum cluster size.
DBSCAN inputs are (x,y,k), where x and y rep-
resent geographical coordinates and k represents the
link density. DBSCAN’s sensitivity analysis utilizes
a k-distance graph to determine ε for each selected
minPts. The optimal values of ε are identified where
this graph exhibits an “elbow” as shown in Figure
7. Ultimately, the best parameters were found to be
minPts = 9 and ε = 0.8.
Figure 7: K-distance graph for DBSCAN.
Figure 8 shows the outcomes of the clustering
process. It is observed that clusters 1, 4, and 5 ex-
hibit high congestion levels and are geographically
connected based on the data in Figure 2. To facili-
tate comparison with the GeoSOM cluster, these three
clusters were merged. The combined cluster is illus-
trated in blue on the lower plot of Figure 8.
5.2 K-Means
K-means is a clustering algorithm that partitions data
points into k
m
clusters and assigns each point to the
cluster with the nearest mean. Often, it serves as a
benchmark to assess the performance of other cluster-
ing algorithms (Lopez et al., 2017; Saeedmanesh and
Geroliminis, 2016). Unlike DBSCAN, K-means only
requires the determination of one parameter, which is
the number of clusters.
The Calinski-Harabasz method (Aik et al., 2023)
Figure 8: DBSCAN.
is employed to identify the best number of clusters.
The results obtained using this method for k
m
values
ranging from 2 to 30 indicate that k
m
= 12 is the best
number of clusters, i.e., the maximum value in Figure
9.
Figure 9: Calinski Harabasz for K-means.
The clustering outcomes are displayed in Figure
10, where cluster 12 corresponds to the most con-
gested area, as inferred from the data presented in Fig-
ure 2.
5.3 Performance Metrics
To evaluate the performance of the GeoSOM algo-
rithm, we compare it to the DBSCAN and K-means
algorithms using the following metrics:
• Quantization Error (QE):
QE =
||k(cluster) −
¯
k(cluster)||
length(cluster)
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
470
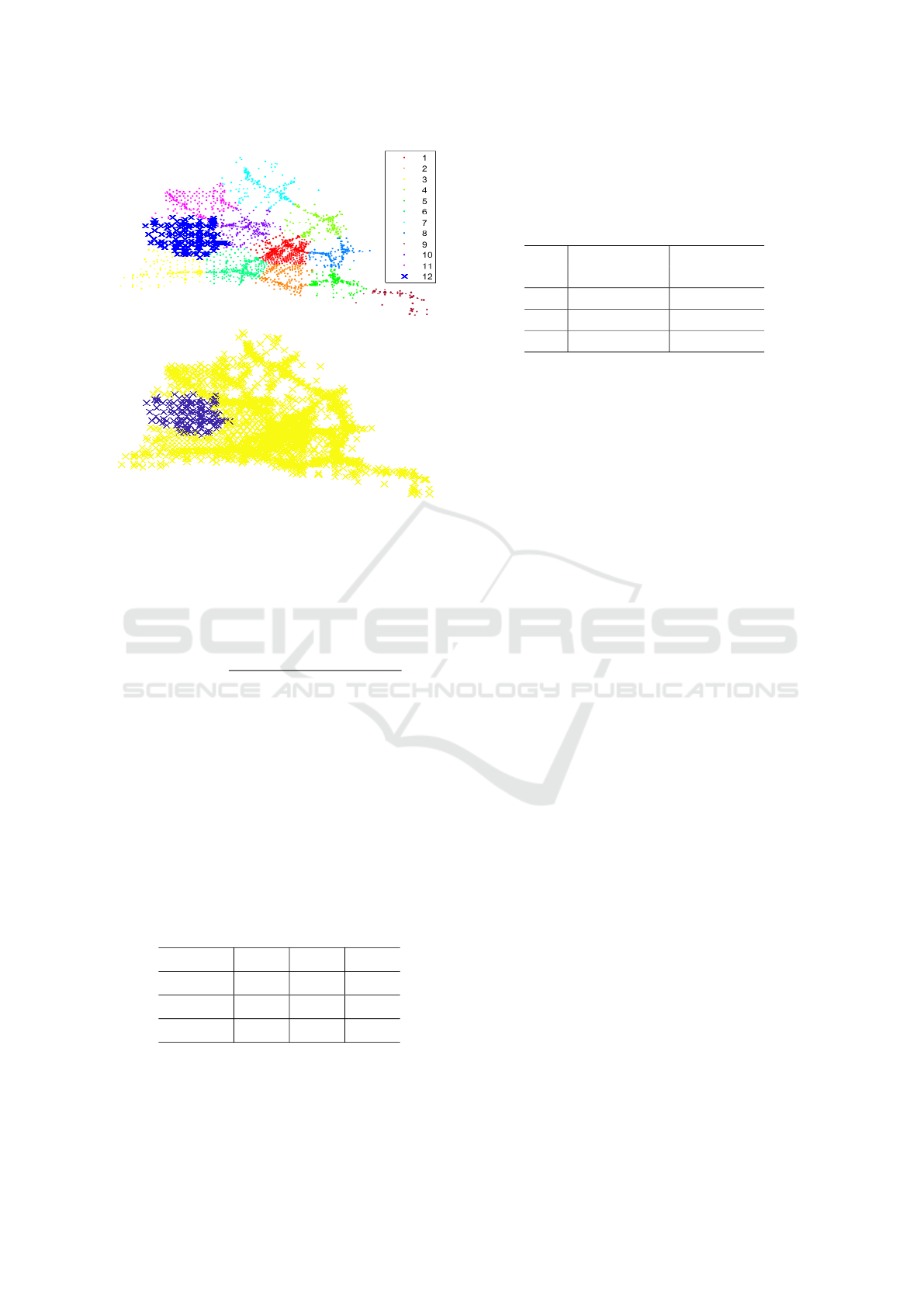
Figure 10: K-means.
where
¯
k(cluster) represents the cluster’s mean
density, and length(cluster) represents the clus-
ter’s number of elements.
• Spatial Quantization Error (SQE):
SQE =
||xy(cluster) − ¯xy(cluster)||
length(cluster)
where ¯xy(cluster) represents the x and y coordi-
nates of the cluster’s centre.
• Density Variance (DV): It refers to the density
variance within the cluster, reflecting how much
the densities of individual points within the clus-
ter deviate from the mean density.
Table 1 illustrates the three performance metrics
for the three clustering algorithms. The performance
is improved when QE, SQE, and DV are minimized.
Table 1 demonstrates that GeoSOM outperforms the
other two algorithms.
Table 1: Performance metrics.
QE SQE DV
DBSCAN 0.0396 0.0095 0.1241
K-means 0.0333 0.0055 0.1494
GeoSOM 0.0336 0.0037 0.0837
Table 2 presents the percentage improvements of
GeoSOM over DBSCAN and K-means across vari-
ous performance metrics. The most significant en-
hancements are observed in SQE and DV, aligning
with GeoSOM’s objectives of fostering spatially con-
nected links within clusters (yielding the best SQE)
and achieving clusters with minimal density variance.
Table 2: Improvement percentage (%).
GeoSOM GeoSOM
over DBSCAN over K-means
QE 15.15 -0.9
SQE 61.05 32.72
DV 32.55 43.98
The results reveal that the GeoSOM approach suc-
cessfully achieved the research goal of identifying
highly congested and geographically compact clusters
with low-density variance, surpassing DBSCAN and
K-means with improvement percentages reaching up
to 43% in DV, up to 61% in SQE, and up to 15% in
QE. These findings could ultimately be used for the
development of traffic control systems aimed at alle-
viating congestion within the network.
6 CONCLUSION
In this research, a novel clustering algorithm is pro-
posed (GeoSOM) to identify densely congested and
spatially compact areas within transportation net-
works. This study provides valuable insights for de-
veloping effective traffic control strategies to alleviate
traffic congestion. The proposed clustering algorithm
is evaluated on a large-scale urban network in down-
town Los Angeles, and its performance is compared
to two other clustering algorithms, namely: DBSCAN
and K-means. The results demonstrated enhance-
ments across all three performance metrics when us-
ing GeoSOM compared to DBSCAN and K-means.
Specifically, there was a 15% reduction in the quan-
tization error, a reduction of up to 43% in the traffic
stream density variance within the cluster, and a re-
duction of up to 61% in the spatial quantization er-
ror. The results also demonstrate GeoSOM’s effec-
tiveness in accurately delineating spatially homoge-
neous, congested areas within a large-scale network.
This research establishes a framework for harnessing
advanced clustering algorithms to tackle intricate traf-
fic management challenges, thereby paving the way
for more efficient urban mobility solutions. Future re-
search will involve leveraging this study’s findings to
develop network perimeter control strategies targeting
congested areas to reduce congestion and improve the
overall efficiency of urban transport systems.
Geographical Self-Organizing Map Clustering in Large-Scale Urban Networks for Perimeter Control
471

ACKNOWLEDGEMENTS
This work was partially funded by the Department of
Energy through the Office of Energy Efficiency and
Renewable Energy (EERE), Vehicle Technologies
Office, Energy Efficient Mobility Systems Program
under award number DE-EE0008209. M. Elouni ac-
knowledges the receipt of the Chenery Grant from
Randolph-Macon College. M. Menendez acknowl-
edges the support of the NYUAD Center for Interact-
ing Urban Networks (CITIES), funded by Tamkeen
under the NYUAD Research Institute Award CG001.
REFERENCES
Abdelghaffar, H. M. and Rakha, H. A. (2019). A novel de-
centralized game-theoretic adaptive traffic signal con-
troller: Large-scale testing. Sensors, 19(10).
Aik, L. E., Choon, T. W., and Abu, M. S. (2023). K-means
algorithm based on flower pollination algorithm and
calinski-harabasz index. In Journal of Physics: Con-
ference Series, volume 2643, page 012019. IOP Pub-
lishing.
Bac¸
˜
ao, F., Lobo, V., and Painho, M. (2004). Geo-self-
organizing map (geo-som) for building and explor-
ing homogeneous regions. In International Confer-
ence on Geographic Information Science, pages 22–
37. Springer.
Bac¸
˜
ao, F., Lobo, V., and Painho, M. (2005). Geo-som and
its integration with geographic information systems.
In Proc. Workshop on Self-Organizing Maps, Paris,
France.
Bichiou, Y., Elouni, M., Abdelghaffar, H. M., and Rakha,
H. A. (2020). Sliding mode network perimeter con-
trol. IEEE Transactions on Intelligent Transportation
Systems, 22(5):2933–2942.
Elouni, M., Abdelghaffar, H. M., and Rakha, H. A. (2021).
Adaptive traffic signal control: Game-theoretic decen-
tralized vs. centralized perimeter control. Sensors,
21(1):274.
Feng, Z., Xu, C., Zuo, Y., Luo, X., Wang, L., Chen, H.,
Xie, X., Yan, D., and Liang, T. (2023). Analysis of
water quality indexes and their relationships with veg-
etation using self-organizing map and geographically
and temporally weighted regression. Environmental
Research, 216:114587.
Hamel, L. and Brown, C. W. (2011). Improved inter-
pretability of the unified distance matrix with con-
nected components. In Proceedings of the Interna-
tional Conference on Data Science (ICDATA), page 1.
The Steering Committee of The World Congress in
Computer Science, Computer Engineering and Ap-
plied Computing (WorldComp).
Henriques, R., Bacao, F., and Lobo, V. (2012). Exploratory
geospatial data analysis using the geosom suite. Com-
puters, Environment and Urban Systems, 36(3):218–
232.
Kim, J.-Y., Gim, U. S., and Oh, M. T. (2014). Characteris-
tic analysis and classification of rural areas: Based on
the eup and myon areas of chungcheongnam-do. The
Korean Regional Development Association, 26(1):27–
44.
Kim, T.-S., Dhakal, T., Kim, S.-H., Lee, J.-H., Kim, S.-
J., and Jang, G.-S. (2023). Examining village char-
acteristics for forest management using self-and geo-
graphic self-organizing maps: A case from the baek-
dudaegan mountain range network in korea. Ecologi-
cal Indicators, 148:110070.
Kohonen, T. (2013). Essentials of the self-organizing map.
Neural networks, 37:52–65.
Le Thi, H. A. and Nguyen, M. C. (2014). Self-organizing
maps by difference of convex functions optimiza-
tion. Data Mining and Knowledge Discovery, 28(5-
6):1336–1365.
Lin, X. and Xu, J. (2020). Road network partition-
ing method based on canopy-kmeans clustering algo-
rithm. Archives of Transport, 54(2):95–106.
Lopez, C., Krishnakumari, P., Leclercq, L., Chiabaut, N.,
and van Lint, H. (2017). Spatiotemporal partition-
ing of transportation network using travel time data.
Transportation Research Record, 2623(1):98–107.
Lukas Amb
¨
uhl, Monica Menendez, M. C. G. (2023).
Understanding congestion propagation by combining
percolation theory with the macroscopic fundamental
diagram. Communications Physics, 6(26).
Melin, P., Monica, J. C., Sanchez, D., and Castillo, O.
(2020). Analysis of spatial spread relationships of
coronavirus (covid-19) pandemic in the world using
self organizing maps. Chaos, Solitons & Fractals,
138:109917.
Pires, F. J., Lobo, V., and Bac¸
˜
ao, F. (2007). Insights on
the interpretation of som and u-matrices with an ex-
ample clustering based in oceanographic data. In 10th
AGILE international conference on geographic infor-
mation science, Aalborg University, Denmark.
Provenzano, D. and Giambrone, R. (2023). Clustering of
tourism patterns with self-organizing maps: The case
of sicily. Tourism Analysis.
Ran, X., Zhou, X., Lei, M., Tepsan, W., and Deng, W.
(2021). A novel k-means clustering algorithm with a
noise algorithm for capturing urban hotspots. Applied
Sciences, 11(23):11202.
Saeedmanesh, M. and Geroliminis, N. (2016). Clustering of
heterogeneous networks with directional flows based
on “snake” similarities. Transportation Research Part
B: Methodological, 91:250–269.
Sahu, R. T., Verma, M. K., and Ahmad, I. (2023). Density-
based spatial clustering of application with noise ap-
proach for regionalisation and its effect on hierarchi-
cal clustering. International Journal of Hydrology Sci-
ence and Technology, 16(3):240–269.
Waters, N. (2017). Tobler’s first law of geography. The
international encyclopedia of geography, pages 1–13.
Wulandari, V., Syarif, Y., Alfian, Z., Althof, M. A., and
Mufidah, M. (2024). Comparison of density-based
spatial clustering of applications with noise (dbscan),
k-means and x-means algorithms on shopping trends
data. IJATIS: Indonesian Journal of Applied Technol-
ogy and Innovation Science, 1(1):1–8.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
472
